JP4549923B2 - 負荷駆動装置およびそれを搭載した電動車両 - Google Patents
負荷駆動装置およびそれを搭載した電動車両 Download PDFInfo
- Publication number
- JP4549923B2 JP4549923B2 JP2005148220A JP2005148220A JP4549923B2 JP 4549923 B2 JP4549923 B2 JP 4549923B2 JP 2005148220 A JP2005148220 A JP 2005148220A JP 2005148220 A JP2005148220 A JP 2005148220A JP 4549923 B2 JP4549923 B2 JP 4549923B2
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- shift
- transmission
- driving device
- boost
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540 biological transmission Effects 0.000 claims description 53
- 230000007423 decrease Effects 0.000 claims description 18
- 230000009467 reduction Effects 0.000 claims description 9
- 230000008859 change Effects 0.000 description 13
- 238000010586 diagram Methods 0.000 description 8
- 239000003990 capacitor Substances 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 7
- 239000000446 fuel Substances 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000003247 decreasing effect Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 2
- 230000000087 stabilizing effect Effects 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 229910000652 nickel hydride Inorganic materials 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/46—Series type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/51—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells characterised by AC-motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/19—Improvement of gear change, e.g. by synchronisation or smoothing gear shift
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/10—DC to DC converters
- B60L2210/14—Boost converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Description
この負荷駆動装置においては、変速中、昇圧電圧を固定するので、変速中に電動機の出力が急激に変化し、かつ、その際に電動機の制御モードが矩形波制御モードであったとしても、電動機の制御が不安定になることはない。したがって、この負荷駆動装置によれば、変速時の電動機制御を安定化することができる。
さらに好ましくは、昇圧制御手段は、変速機による変速中、昇圧電圧を変速開始時の昇圧電圧に設定する。
この負荷駆動装置においては、変速中、電動機の出力トルクの低減に応じて昇圧電圧が低下するのを禁止するので、電動機の制御モードが矩形波制御モードであったとしても、電動機の制御が不安定になることはない。したがって、この負荷駆動装置によれば、変速時の電動機制御を安定化することができる。
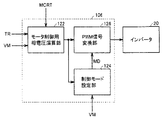
図1は、この発明の実施の形態1による電動車両の全体ブロック図である。図1を参照して、この電動車両100は、バッテリBと、昇圧コンバータ10と、インバータ20と、ECU(Electronic Control Unit)30と、モータジェネレータMGと、変速機TMと、駆動輪DWと、コンデンサC1,C2と、電圧センサ42,44と、回転センサ46と、電源ラインPL1,PL2と、接地ラインSLとを備える。
実施の形態1では、変速中、昇圧コンバータ10の出力電圧を固定したが、実施の形態2では、昇圧コンバータ10の出力電圧の上昇を許容する。言い換えると、この実施の形態2では、変速中、昇圧コンバータ10の出力電圧が低下しないように昇圧コンバータ10の出力電圧が制御される。これにより、実施の形態1と同様に、変速前半にモータジェネレータMGのトルクの低減に伴なって電圧VMが変化(低下)することにより制御が不安定になるのを防止し、さらに、変速終了時に制御モードが矩形波制御モードになっている場合に、変速終了とともに電圧VMの固定が解除されて電圧VMが上昇することにより制御が不安定となるのを防止する。
実施の形態3では、変速開始とともに昇圧コンバータ10の出力電圧を制御可能な最大電圧まで上昇させ、変速中は昇圧コンバータ10の出力電圧をその最大電圧に固定する。すなわち、実施の形態2では、変速後半のモータジェネレータMGのトルク指令値TRの上昇(復帰)に応じて電圧VMを上昇させたが、この実施の形態3では、変速開始時に予め電圧VMを上昇させる。
Claims (9)
- 車両の駆動力を発生する電動機と前記車両の駆動輪との間に変速機を有する電動車両の負荷駆動装置であって、
前記電動機を駆動する駆動装置と、
直流電源からの直流電圧を昇圧し、その昇圧した昇圧電圧を前記駆動装置に供給する昇圧変換器と、
前記電動機の出力に基づいて前記昇圧電圧を設定し、その設定した昇圧電圧を生成するように前記昇圧変換器を制御する昇圧制御手段とを備え、
前記昇圧制御手段は、前記変速機による変速中、前記電動機の出力変動に拘わらず前記昇圧電圧を一定値に設定する、負荷駆動装置。 - 前記昇圧制御手段は、前記変速機による変速中、前記昇圧電圧を変速開始時の昇圧電圧に設定する、請求項1に記載の負荷駆動装置。
- 前記駆動装置は、前記電動機の制御モードとして矩形波制御モードを有する、請求項1または請求項2に記載の負荷駆動装置。
- 車両の駆動力を発生する電動機と前記車両の駆動輪との間に変速機を有する電動車両の負荷駆動装置であって、
前記電動機を駆動する駆動装置と、
直流電源からの直流電圧を昇圧し、その昇圧した昇圧電圧を前記駆動装置に供給する昇圧変換器と、
前記電動機の出力に基づいて前記昇圧電圧を設定し、その設定した昇圧電圧を生成するように前記昇圧変換器を制御する昇圧制御手段と、
前記変速機による変速時、前記電動機の出力トルクを低減するように前記駆動装置を制御するトルク制御手段とを備え、
前記昇圧制御手段は、前記変速機による変速中、前記トルク制御手段による前記電動機の出力トルクの低減に応じて前記昇圧電圧が低下しないように、前記昇圧変換器を制御する、負荷駆動装置。 - 前記昇圧制御手段は、前記変速機による変速中、前記昇圧電圧を一定値に設定する、請求項4に記載の負荷駆動装置。
- 前記昇圧制御手段は、前記変速機による変速中、前記昇圧電圧を変速開始時の昇圧電圧に設定する、請求項5に記載の負荷駆動装置。
- 前記昇圧制御手段は、前記変速機による変速中、前記昇圧電圧を制御可能な最大電圧に設定する、請求項4に記載の負荷駆動装置。
- 前記駆動装置は、前記電動機の制御モードとして矩形波制御モードを有する、請求項4から請求項7のいずれか1項に記載の負荷駆動装置。
- 車両の駆動力を発生する電動機と、
前記電動機と前記車両の駆動輪との間に設けられる変速機と、
請求項1から請求項8のいずれか1項に記載の負荷駆動装置とを備える電動車両。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005148220A JP4549923B2 (ja) | 2005-05-20 | 2005-05-20 | 負荷駆動装置およびそれを搭載した電動車両 |
| CN2006800176074A CN101180191B (zh) | 2005-05-20 | 2006-05-19 | 负荷驱动设备和安装有该设备的电动车辆 |
| US11/918,230 US7923945B2 (en) | 2005-05-20 | 2006-05-19 | Voltage control of upconverter in a motored vehicle drive |
| EP06756615.8A EP1881910B1 (en) | 2005-05-20 | 2006-05-19 | Voltage control of upconverter in a motored vehicle drive |
| BRPI0610687A BRPI0610687B1 (pt) | 2005-05-20 | 2006-05-19 | aparelho de acionamento de carga e veículo motorizado |
| KR1020077029663A KR100958710B1 (ko) | 2005-05-20 | 2006-05-19 | 부하구동장치 및 이를 탑재한 자동차 |
| PCT/JP2006/310515 WO2006123843A2 (en) | 2005-05-20 | 2006-05-19 | Voltage control of upconverter in a motored vehicle drive |
| AU2006248320A AU2006248320B2 (en) | 2005-05-20 | 2006-05-19 | Voltage control of upconverter in a motored vehicle drive |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005148220A JP4549923B2 (ja) | 2005-05-20 | 2005-05-20 | 負荷駆動装置およびそれを搭載した電動車両 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006325374A JP2006325374A (ja) | 2006-11-30 |
| JP2006325374A5 JP2006325374A5 (ja) | 2007-11-08 |
| JP4549923B2 true JP4549923B2 (ja) | 2010-09-22 |
Family
ID=36954807
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005148220A Active JP4549923B2 (ja) | 2005-05-20 | 2005-05-20 | 負荷駆動装置およびそれを搭載した電動車両 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7923945B2 (ja) |
| EP (1) | EP1881910B1 (ja) |
| JP (1) | JP4549923B2 (ja) |
| KR (1) | KR100958710B1 (ja) |
| CN (1) | CN101180191B (ja) |
| AU (1) | AU2006248320B2 (ja) |
| BR (1) | BRPI0610687B1 (ja) |
| WO (1) | WO2006123843A2 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10361215A1 (de) * | 2003-12-24 | 2005-07-28 | Daimlerchrysler Ag | Elektrische Einrichtung und Betriebsverfahren |
| JP5125093B2 (ja) * | 2006-12-19 | 2013-01-23 | 日産自動車株式会社 | 車両用モータ制御装置および車両用モータ制御方法 |
| JP5311864B2 (ja) * | 2007-04-13 | 2013-10-09 | 三洋電機株式会社 | モータ制御装置 |
| US8165737B2 (en) * | 2007-10-24 | 2012-04-24 | GM Global Technology Operations LLC | Method and system for controlling a power inverter in electric drives of vehicles with two-mode transmissions |
| JP5458504B2 (ja) * | 2008-03-14 | 2014-04-02 | 富士通セミコンダクター株式会社 | 半導体装置の試験方法及びその装置 |
| JP5065222B2 (ja) | 2008-10-17 | 2012-10-31 | トヨタ自動車株式会社 | 車両制御システム |
| JP5365227B2 (ja) * | 2009-02-04 | 2013-12-11 | トヨタ自動車株式会社 | 車両用モータ制御装置 |
| DE102010040137A1 (de) * | 2010-09-02 | 2012-03-08 | Robert Bosch Gmbh | Verfahren und System zur Steuerung eines Antriebs eines Fahrzeugs |
| DE102010042915A1 (de) * | 2010-10-26 | 2012-04-26 | Zf Friedrichshafen Ag | Verfahren zum Betrieb eines elektrischen Antriebssystems |
| JP5264940B2 (ja) * | 2011-01-21 | 2013-08-14 | 本田技研工業株式会社 | 電動車両用電源装置 |
| JP5264941B2 (ja) * | 2011-01-21 | 2013-08-14 | 本田技研工業株式会社 | 電動車両用電源装置 |
| JP5696729B2 (ja) * | 2013-02-05 | 2015-04-08 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6604436B2 (ja) * | 2016-06-21 | 2019-11-20 | 日産自動車株式会社 | モータの制御装置、及び、制御方法 |
| FR3062758B1 (fr) * | 2017-02-09 | 2020-11-06 | Valeo Equip Electr Moteur | Procede de commande d'une machine electrique tournante lors d'un changement de modulation de type pleine onde vers une modulation de largeur d'impulsion |
| CN117755111A (zh) * | 2021-11-01 | 2024-03-26 | 华为数字能源技术有限公司 | 一种电机驱动系统、车辆、充电方法 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05292603A (ja) * | 1992-04-09 | 1993-11-05 | Toyota Motor Corp | 電気自動車の制動制御装置 |
| JPH06107042A (ja) * | 1992-09-29 | 1994-04-19 | Nissan Motor Co Ltd | 車両駆動装置の制御方法及び装置 |
| JPH08168110A (ja) * | 1994-12-09 | 1996-06-25 | Mitsubishi Motors Corp | 電気自動車の変速制御方法 |
| JPH08336205A (ja) * | 1995-04-07 | 1996-12-17 | Nippon Soken Inc | ハイブリッド車両のバッテリ充電装置 |
| JPH1066383A (ja) * | 1996-08-22 | 1998-03-06 | Toyota Motor Corp | 永久磁石型同期モータの駆動制御装置 |
| JP2000006690A (ja) * | 1998-06-22 | 2000-01-11 | Toyota Motor Corp | 車両用変速制御装置 |
| JP2001008315A (ja) * | 1999-06-16 | 2001-01-12 | Yamaha Motor Co Ltd | 電動車両の駆動制御装置 |
| JP2003118434A (ja) * | 2001-10-11 | 2003-04-23 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2004208409A (ja) * | 2002-12-25 | 2004-07-22 | Denso Corp | 車両用動力制御装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0191696A (ja) * | 1987-02-19 | 1989-04-11 | Mitsubishi Electric Corp | 交流エレベ−タの制御装置 |
| JP3542197B2 (ja) * | 1995-04-28 | 2004-07-14 | 本田技研工業株式会社 | 電動車両の制御装置 |
| JP3520668B2 (ja) | 1996-06-11 | 2004-04-19 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JPH11113283A (ja) * | 1997-09-30 | 1999-04-23 | Toshiba Corp | モータの駆動装置 |
| JP3736268B2 (ja) * | 2000-03-21 | 2006-01-18 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| US6262545B1 (en) * | 2000-04-24 | 2001-07-17 | International Business Machines Corporation | Dual speed motor drive circuit |
| DE10103520A1 (de) * | 2001-01-26 | 2002-08-01 | Isad Electronic Sys Gmbh & Co | Generatorsystem, insbesondere für ein Kraftfahrzeug, sowie Verfahren zum Ansteuern eines Wechselrichters eines Asynchrongenerators |
| JP3580257B2 (ja) | 2001-02-05 | 2004-10-20 | トヨタ自動車株式会社 | ハイブリッド車 |
| JP3625789B2 (ja) * | 2001-08-10 | 2005-03-02 | 本田技研工業株式会社 | 車両の電源装置 |
| JP3638263B2 (ja) * | 2001-09-10 | 2005-04-13 | 本田技研工業株式会社 | 車両駆動装置 |
| JP3893938B2 (ja) | 2001-10-22 | 2007-03-14 | トヨタ自動車株式会社 | 変速機を備えたハイブリッド車駆動構造 |
| US6917179B2 (en) * | 2001-10-25 | 2005-07-12 | Toyota Jidosha Kabushiki Kaisha | Load driver and control method for safely driving DC load and computer-readable recording medium with program recorded thereon for allowing computer to execute the control |
| CN2529441Y (zh) * | 2001-12-29 | 2003-01-01 | 中国科学院电工研究所 | 燃料电池电动车用dc-dc稳压电源 |
| JP3852403B2 (ja) | 2002-12-25 | 2006-11-29 | トヨタ自動車株式会社 | ハイブリッド駆動装置の制御装置 |
-
2005
- 2005-05-20 JP JP2005148220A patent/JP4549923B2/ja active Active
-
2006
- 2006-05-19 WO PCT/JP2006/310515 patent/WO2006123843A2/en active Application Filing
- 2006-05-19 KR KR1020077029663A patent/KR100958710B1/ko active IP Right Grant
- 2006-05-19 CN CN2006800176074A patent/CN101180191B/zh active Active
- 2006-05-19 US US11/918,230 patent/US7923945B2/en active Active
- 2006-05-19 BR BRPI0610687A patent/BRPI0610687B1/pt active IP Right Grant
- 2006-05-19 EP EP06756615.8A patent/EP1881910B1/en active Active
- 2006-05-19 AU AU2006248320A patent/AU2006248320B2/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05292603A (ja) * | 1992-04-09 | 1993-11-05 | Toyota Motor Corp | 電気自動車の制動制御装置 |
| JPH06107042A (ja) * | 1992-09-29 | 1994-04-19 | Nissan Motor Co Ltd | 車両駆動装置の制御方法及び装置 |
| JPH08168110A (ja) * | 1994-12-09 | 1996-06-25 | Mitsubishi Motors Corp | 電気自動車の変速制御方法 |
| JPH08336205A (ja) * | 1995-04-07 | 1996-12-17 | Nippon Soken Inc | ハイブリッド車両のバッテリ充電装置 |
| JPH1066383A (ja) * | 1996-08-22 | 1998-03-06 | Toyota Motor Corp | 永久磁石型同期モータの駆動制御装置 |
| JP2000006690A (ja) * | 1998-06-22 | 2000-01-11 | Toyota Motor Corp | 車両用変速制御装置 |
| JP2001008315A (ja) * | 1999-06-16 | 2001-01-12 | Yamaha Motor Co Ltd | 電動車両の駆動制御装置 |
| JP2003118434A (ja) * | 2001-10-11 | 2003-04-23 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2004208409A (ja) * | 2002-12-25 | 2004-07-22 | Denso Corp | 車両用動力制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| BRPI0610687B1 (pt) | 2018-12-18 |
| US7923945B2 (en) | 2011-04-12 |
| EP1881910A2 (en) | 2008-01-30 |
| WO2006123843A2 (en) | 2006-11-23 |
| AU2006248320A1 (en) | 2006-11-23 |
| KR100958710B1 (ko) | 2010-05-18 |
| US20090033257A1 (en) | 2009-02-05 |
| CN101180191B (zh) | 2011-03-23 |
| BRPI0610687A2 (pt) | 2010-07-20 |
| CN101180191A (zh) | 2008-05-14 |
| EP1881910B1 (en) | 2018-11-21 |
| JP2006325374A (ja) | 2006-11-30 |
| WO2006123843A3 (en) | 2007-03-22 |
| KR20080016867A (ko) | 2008-02-22 |
| AU2006248320B2 (en) | 2011-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4549923B2 (ja) | 負荷駆動装置およびそれを搭載した電動車両 | |
| JP4325637B2 (ja) | 負荷駆動装置およびそれを備えた車両 | |
| JP4737195B2 (ja) | 負荷駆動装置、車両、および負荷駆動装置における異常処理方法 | |
| US8297391B2 (en) | Power supply system, vehicle provided with the same, power supply system control method and computer-readable recording medium bearing program for causing computer to control the power supply system | |
| US7828093B2 (en) | Vehicle controller, vehicle and vehicle control method | |
| JP4356715B2 (ja) | 電源装置、および電源装置を備える車両 | |
| JP4685655B2 (ja) | 電動車両の制御装置 | |
| JP5126003B2 (ja) | 車両の制御装置および制御方法 | |
| US7869233B2 (en) | Voltage conversion device and computer-readable recording medium having program recorded thereon for computer to control voltage conversion by voltage conversion device | |
| JP4623003B2 (ja) | モータ駆動装置 | |
| JP2009261201A (ja) | 電源システムおよびそれを備えた車両 | |
| CN108688650B (zh) | 混合动力车辆及其控制方法 | |
| JP2006325373A (ja) | 電動機制御装置 | |
| JP2012182912A (ja) | 電動車両およびその制御方法 | |
| JP2010220306A (ja) | モータの制御装置 | |
| JP4609153B2 (ja) | 電源制御装置および電源制御装置の制御方法 | |
| JP2012196082A (ja) | 電動車両 | |
| JP2018074849A (ja) | コンバータ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20070126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20070126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070925 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070925 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100629 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100707 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4549923 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130716 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |