JP4405898B2 - 後処理装置、および、画像形成システム - Google Patents
後処理装置、および、画像形成システム Download PDFInfo
- Publication number
- JP4405898B2 JP4405898B2 JP2004333299A JP2004333299A JP4405898B2 JP 4405898 B2 JP4405898 B2 JP 4405898B2 JP 2004333299 A JP2004333299 A JP 2004333299A JP 2004333299 A JP2004333299 A JP 2004333299A JP 4405898 B2 JP4405898 B2 JP 4405898B2
- Authority
- JP
- Japan
- Prior art keywords
- post
- current
- stapler
- processing
- image forming
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H37/00—Article or web delivery apparatus incorporating devices for performing specified auxiliary operations
- B65H37/04—Article or web delivery apparatus incorporating devices for performing specified auxiliary operations for securing together articles or webs, e.g. by adhesive, stitching or stapling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2513/00—Dynamic entities; Timing aspects
- B65H2513/50—Timing
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Folding Of Thin Sheet-Like Materials, Special Discharging Devices, And Others (AREA)
- Paper Feeding For Electrophotography (AREA)
Description
[第1の例]
本発明の第1の実施の形態を、図1〜図8に基づいて説明する。
(装置構成)
本例では、レーザビームプリンタに代表される画像形成装置を備えた画像形成システムにおいて、画像形成装置に装着される後処理装置の構成例について説明する。
100は、画像形成装置110の上部に設置された後処理装置である。この後処理装置100は、シートを束状に積載および整列させてステープルを行うステープラ316(図2、図3参照)と、積載排出するスタッカの機能を有するステープルスタッカとからなる。
シート106は、画像形成装置110より後処理装置100に搬送され、整合部材104内に積載され、左右の整合部材104L,104Rによって揃えられながらシート束111として、整合部材104内に保持される。所定枚数のシート106の保持と整合動作の後、後処理装置100はステープラ316にてシート後端付近を針で綴じるステープル処理を行う。
300は、後処理装置100の制御を行うハードウェアであるコントローラであり、その上にはフィニッシャ制御部301や各種ハードウェア回路が実装されている。
この電流検知/制限回路314は、電流制限回路314aと、電流検知回路314bとからなる。電流制限回路314aは、電流制限回路314cと、電流制限回路314dとからなる。
次に、本装置の動作について説明する。
ステープル処理時における駆動信号の信号上限値の制限設定例として、駆動電流の電流制限設定を行う例について述べる。
図5は、画像形成装置110に接続されている後処理装置100内での後処理動作を説明するフローチャートを示す。
ステップS400では、ステープル処理の開始直後に時間監視のためのタイマーを起動する。
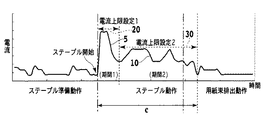
ステープラ駆動期間は、起動直後の電流が大きくなる電流突入期間20と、その後の期間30として、針がシートを貫通する期間や針を折り曲げる期間などの複数の所定期間に分割することができる。電流上限値として、電流突入期間20の突入電流5の電流上限設定1や、その後の期間30の駆動電流10の電流上限設定2を、ROM301b内に数値として保持しておくことにより、CPU301はそれら保持された電流上限値をステープラ315の駆動直前にステープラ駆動回路313へ設定する。(ステップ403)
本発明の第2の実施の形態を、図9〜図10に基づいて説明する。なお、前述した第1の例と同一部分については、その説明を省略し、同一符号を付す。
本例は、後処理装置100のステープラ315が、異常状態である針ジャム設定状態(図5のフローチャートS411の状態)から復帰する場合の例である。
復帰処理がスタートし、まず、ステップS500では、ステープラ針ジャム解除時の駆動電流5、10の設定を行う。
針ジャム状態となるまでの電流制限は、前述した図7若しくは図8のように駆動開始直後とその後の期間において設定しており、針ジャムからの復帰動作を行う前に、針ジャム解除時の駆動電流5、10の設定として、復帰時電流上限設定3を行う。そして、図10のように、針ジャム状態からの復帰動作開始直後である復帰時の電流制限において、所定値(=復帰時電流上限設定3)以下となるように制御する。
ステープラ電流制限設定の確認は、フィニッシャ制御部301のCPU301aにて後処理装置100の動作中に実行されており、例えば、他の処理との間に所定時間間隔でCPU301aにて実行し、RAM301cの所定領域に保持されている最新の電流制限設定値を確認することができる。
本発明の第3の実施の形態を、図12に基づいて説明する。なお、前述した第1の例と同一部分については、その説明を省略し、同一符号を付す。
本例は、ステープラ315が駆動中における電流制限を設定する場合の例である。
ステップS400では、ステープル処理の開始直後に時間監視のためのタイマーを起動する。
本発明の第4の実施の形態を、図13に基づいて説明する。なお、前述した第1の例と同一部分については、その説明を省略し、同一符号を付す。
101 入口ローラ
102 搬送ローラ
103 排出ローラ
104,104L,104R 整合部材
105 排出トレイ
106 シート(SH)
110 画像形成装置
111 シート束
112 ピックアップローラ
113 フィードリタードローラ
114 トナーカートリッジ
115 電子写真プロセス部
116 定着部
117 排出トレイ
300 コントローラ
301 フィニッシャ制御部
301a CPU
301b 不揮発性メモリROM
301c 揮発性メモリRAM
302 プリンタ部
303 通信I/F回路
304 搬送モータ駆動部
305 搬送モータ
306 センサ入力回路
307 搬送系センサ
308 整合モータ駆動回路
309 整合モータ
310 HP検知回路
311 整合ホームポジション(HP)センサ
312 電源
313 ステープラ駆動回路
314 電流検知/制限回路
314a 電流制限回路
314b 電流検知回路
314c,314d 電流制限回路
315 HP検知回路
316 ステープラユニット
317 ステープラモータ
318 ステープラホームポジション(HP)センサ
Claims (7)
- 画像形成装置から出力されたシートを装置本体内に搬送するシート搬送手段と、
前記装置本体内に搬送された複数の前記シートからなるシート束に対してステープル処理を実行する後処理手段と、
前記後処理手段による前記ステープル処理の開始後の前記ステープル処理の動作状態に基づいて、前記ステープル処理の開始後における複数の所定期間において、前記後処理手段を駆動するために前記後処理手段に供給される電力が前記複数の所定期間の夫々で異なるように制限する駆動電力制限手段と、
前記後処理手段により前記シート束へ前記ステープル処理を行った後、前記ステープル処理された前記シート束を積載するシート束積載手段と
を具えたことを特徴とする後処理装置。 - 前記駆動電力制限手段は、
前記ステープル処理の開始後の前記複数の所定期間の夫々において、電流値を異なる値に設定することにより電力を制限することを特徴とする請求項1記載の後処理装置。 - 前記ステープル処理の開始後の前記複数の所定期間は、前記後処理装置を駆動するモータの起動開始直後の突入電流が生じている第1の期間と、前記突入電流の収束後から前記ステープル処理の完了までの第2の期間とからなることを特徴とする請求項2記載の後処理装置。
- 前記駆動電力制限手段は、
前記後処理手段に異常が発生した後の異常復帰動作開始からの所定期間において、前記電流値を前記複数の所定期間における電流値とは異なる値に設定することを特徴とする請求項2又は3に記載の後処理装置。 - 前記駆動電力制限手段は、
前記画像形成装置に接続される他の装置の動作状態に基づいて、前記電流値を設定することを特徴とする請求項2又は3に記載の後処理装置。 - 前記駆動電力制限手段は、
前記ステープル処理の基準位置となるホームポジションを検知しているか否かを判定し、判定結果に基づいて、前記電力を制限することを特徴とする請求項1記載の後処理装置。 - 電子写真式の画像形成装置を備えた画像形成システムであって、
前記画像形成装置の後段に、請求項1記載の後処理装置を接続して構成したことを特徴とする画像形成システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004333299A JP4405898B2 (ja) | 2003-12-26 | 2004-11-17 | 後処理装置、および、画像形成システム |
| US11/016,860 US7240898B2 (en) | 2003-12-26 | 2004-12-21 | Post-processing device and post-processing method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003435941 | 2003-12-26 | ||
| JP2004333299A JP4405898B2 (ja) | 2003-12-26 | 2004-11-17 | 後処理装置、および、画像形成システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005206374A JP2005206374A (ja) | 2005-08-04 |
| JP2005206374A5 JP2005206374A5 (ja) | 2007-12-27 |
| JP4405898B2 true JP4405898B2 (ja) | 2010-01-27 |
Family
ID=34703347
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004333299A Expired - Fee Related JP4405898B2 (ja) | 2003-12-26 | 2004-11-17 | 後処理装置、および、画像形成システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7240898B2 (ja) |
| JP (1) | JP4405898B2 (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6227644B1 (en) | 1998-05-04 | 2001-05-08 | Hewlett-Packard Company | Inkjet dot imaging sensor for the calibration of inkjet print heads |
| US7400227B2 (en) * | 2005-06-30 | 2008-07-15 | Ge Security, Inc. | Fire alarm notification power supply with configurable notification appliance circuits and auxiliary power circuits apparatus and method |
| JP4569522B2 (ja) * | 2006-05-30 | 2010-10-27 | コニカミノルタビジネステクノロジーズ株式会社 | 画像形成システム |
| US7950642B2 (en) * | 2007-07-12 | 2011-05-31 | Kabushiki Kaisha Toshiba | Sheet finishing apparatus and control method |
| US7946567B2 (en) * | 2008-03-13 | 2011-05-24 | Kabushiki Kaisha Toshiba | Post-processing apparatus with peak power consumption control |
| JP5494103B2 (ja) * | 2010-03-25 | 2014-05-14 | 富士ゼロックス株式会社 | ステープラ駆動装置、ステープラ駆動方法、ステープラ制御プログラム、後処理装置、および画像形成装置 |
| JP5691213B2 (ja) * | 2010-03-25 | 2015-04-01 | 富士ゼロックス株式会社 | ステープラ駆動装置、ステープラ駆動方法、ステープラ制御プログラム、後処理装置、および画像形成システム |
| JP5771899B2 (ja) * | 2010-03-25 | 2015-09-02 | 富士ゼロックス株式会社 | ステープラ駆動装置、ステープラ駆動方法、後処理装置、および画像形成装置 |
| JP5494102B2 (ja) * | 2010-03-25 | 2014-05-14 | 富士ゼロックス株式会社 | ステープラ駆動装置、ステープラ駆動方法、ステープラ制御プログラム、後処理装置、および画像形成装置 |
| JP5515940B2 (ja) * | 2010-03-26 | 2014-06-11 | 富士ゼロックス株式会社 | 画像形成システムおよび後処理装置 |
| JP5634201B2 (ja) * | 2010-10-05 | 2014-12-03 | キヤノン株式会社 | 画像形成装置及びステープラ |
| JP5731874B2 (ja) * | 2011-03-31 | 2015-06-10 | キヤノン株式会社 | スイッチング電源装置およびシート処理装置 |
| JP6218432B2 (ja) * | 2013-05-20 | 2017-10-25 | キヤノン株式会社 | シート処理装置及び画像形成装置 |
| JP5911612B2 (ja) * | 2014-01-23 | 2016-04-27 | キヤノン株式会社 | シート処理装置及び画像形成装置 |
| JP5911611B2 (ja) | 2014-01-23 | 2016-04-27 | キヤノン株式会社 | シート処理装置及び画像形成装置 |
| US9568880B2 (en) | 2014-01-23 | 2017-02-14 | Canon Kabushiki Kaisha | Sheet processing apparatus and image forming apparatus having binding processing function |
| JP5984970B2 (ja) * | 2014-01-23 | 2016-09-06 | キヤノン株式会社 | シート処理装置及び画像形成装置 |
| JP5668886B1 (ja) * | 2014-07-09 | 2015-02-12 | 富士ゼロックス株式会社 | 綴じ処理装置および画像形成装置 |
| JP6540102B2 (ja) * | 2015-03-03 | 2019-07-10 | コニカミノルタ株式会社 | 用紙後処理装置、画像形成装置、用紙後処理装置の制御方法、及び用紙後処理装置の制御プログラム |
| JP6578678B2 (ja) * | 2015-03-10 | 2019-09-25 | コニカミノルタ株式会社 | 用紙後処理装置、画像形成装置、用紙後処理装置の制御方法、及び用紙後処理装置の制御プログラム |
| JP2020079156A (ja) * | 2018-11-14 | 2020-05-28 | コニカミノルタ株式会社 | 綴じ処理装置、画像形成装置、シート束を綴じる方法、及び、プログラム |
| JP2021041570A (ja) * | 2019-09-09 | 2021-03-18 | マックス株式会社 | 電動ステープラ |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08129287A (ja) * | 1994-10-31 | 1996-05-21 | Fuji Xerox Co Ltd | 画像形成装置 |
| US5730438A (en) * | 1996-11-25 | 1998-03-24 | Xerox Corporation | Reproduction apparatus with lower peak power requirement with integral battery powered stapling and low power recharging system |
| JP3667999B2 (ja) * | 1997-07-22 | 2005-07-06 | 株式会社リコー | 用紙処理装置 |
| JP2000321940A (ja) | 1999-05-10 | 2000-11-24 | Konica Corp | 画像形成装置 |
| US7448615B2 (en) * | 2002-10-23 | 2008-11-11 | Canon Kabushiki Kaisha | Sheet processing apparatus featuring relatively-displaced stapled sheet bundles and related method |
-
2004
- 2004-11-17 JP JP2004333299A patent/JP4405898B2/ja not_active Expired - Fee Related
- 2004-12-21 US US11/016,860 patent/US7240898B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20050140077A1 (en) | 2005-06-30 |
| US7240898B2 (en) | 2007-07-10 |
| JP2005206374A (ja) | 2005-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4405898B2 (ja) | 後処理装置、および、画像形成システム | |
| US7437093B2 (en) | Sheet-processing system | |
| US7201368B2 (en) | Sheet finisher and control method thereof | |
| JP5716353B2 (ja) | 排紙トレイ装置並びに画像形成システム | |
| US7448615B2 (en) | Sheet processing apparatus featuring relatively-displaced stapled sheet bundles and related method | |
| US7715735B2 (en) | Image forming system and control method for the same | |
| US8074976B2 (en) | Image forming system including finisher with stapler for binding printed papers | |
| JP5481888B2 (ja) | 製本システム、製本方法、製本制御プログラム、及び記録媒体 | |
| CN103365143B (zh) | 图像形成装置及图像形成方法 | |
| JP2009126101A (ja) | 画像形成装置、印刷出力制御方法及びプログラム | |
| JP2008262103A (ja) | 印刷装置の制御装置、印刷システム、および印刷装置の制御プログラム | |
| JP5884510B2 (ja) | 画像形成システム | |
| JP2015028567A (ja) | シート処理装置、及び画像形成システム | |
| JP2008053791A (ja) | 画像形成システム | |
| JP2020141190A (ja) | 画像形成装置 | |
| JP2013126905A (ja) | 針なし綴じ装置、及び、画像形成装置 | |
| JP2020059240A (ja) | 画像形成システム | |
| JP2005169934A (ja) | 画像形成装置 | |
| JP7434836B2 (ja) | 後処理装置、画像形成装置、後処理方法 | |
| JP2009126628A (ja) | 画像形成システムの後処理制御方法 | |
| JP4208725B2 (ja) | 画像記録装置 | |
| JP2021160881A (ja) | 印刷装置、画像印刷装置 | |
| JP2021181360A (ja) | 後処理装置、画像形成システム、および制御方法 | |
| JP4843566B2 (ja) | 画像形成システム | |
| JP2006168967A (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071113 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071113 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090807 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091006 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091030 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091105 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121113 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131113 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |