JP4291709B2 - 直線移動機構およびこれを用いた搬送ロボット - Google Patents
直線移動機構およびこれを用いた搬送ロボット Download PDFInfo
- Publication number
- JP4291709B2 JP4291709B2 JP2004052902A JP2004052902A JP4291709B2 JP 4291709 B2 JP4291709 B2 JP 4291709B2 JP 2004052902 A JP2004052902 A JP 2004052902A JP 2004052902 A JP2004052902 A JP 2004052902A JP 4291709 B2 JP4291709 B2 JP 4291709B2
- Authority
- JP
- Japan
- Prior art keywords
- vertical axis
- link arm
- moving member
- moving
- link
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000007246 mechanism Effects 0.000 title claims description 204
- 238000012546 transfer Methods 0.000 title claims description 87
- 230000002452 interceptive effect Effects 0.000 claims description 7
- 238000000034 method Methods 0.000 description 26
- 230000008569 process Effects 0.000 description 26
- 230000003028 elevating effect Effects 0.000 description 19
- 230000001965 increasing effect Effects 0.000 description 13
- 230000005540 biological transmission Effects 0.000 description 12
- 230000004048 modification Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 230000009467 reduction Effects 0.000 description 7
- 238000004519 manufacturing process Methods 0.000 description 6
- 239000004973 liquid crystal related substance Substances 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- 239000000758 substrate Substances 0.000 description 4
- 239000011521 glass Substances 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000013461 design Methods 0.000 description 1
- 239000011796 hollow space material Substances 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
Images






























Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67766—Mechanical parts of transfer devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/106—Programme-controlled manipulators characterised by positioning means for manipulator elements with articulated links
- B25J9/1065—Programme-controlled manipulators characterised by positioning means for manipulator elements with articulated links with parallelograms
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/13—Handlers utilizing parallel links
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
Description
2 移動部材
2’ 補助移動部材
20A 第1移動部材
20B 第2移動部材
20,20’ 案内溝
20a,20b,20b’ ハンド支持部
21a,21b,21b’ ハンド
23b 支持アーム
24a 連結アーム
3 駆動機構
3A 平行四辺形リンク機構
30A 第1駆動機構
30B,30B’ 第2駆動機構
31 第1リンクアーム
31a 第1ギア
31a’ 第1間欠ギア
31aa 第3ギア
32 副リンクアーム
33 中間リンク
33’ 補助中間リンク
34 第2リンクアーム
34a 第2ギア
34a’ 第2間欠ギア
35 第3リンクアーム
35a 第4ギア
300 旋回ベース
4,4’ ハンド
421 第1ガイドレール
422 第2ガイドレール
5,200 固定ベース
O1〜O11 第1〜第11垂直軸
Os 旋回軸
A,A1 搬送ロボット
B 直線移動機構
GL 移動行程
PL 平行線
AL 弧線
W ワーク
Claims (17)
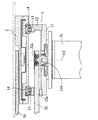
- ガイド部材と、このガイド部材にスライド可能に支持され、このガイド部材上に設定された水平直線状の移動行程に沿って移動可能な移動部材と、この移動部材を駆動する駆動機構とを備えた直線移動機構であって、
上記駆動機構は、上記ガイド部材における上記移動行程上またはその平行線上の第1垂直軸を中心として回動駆動される第1リンクアームと、上記移動行程上またはその平行線上の上記第1垂直軸と異なる第2垂直軸を中心として回動可能な副リンクアームと、上記第1リンクアームおよび副リンクアームが第3垂直軸および第4垂直軸を中心として相対回動可能に連結される中間リンクとを備えた平行四辺形リンク機構を含むとともに、上記中間リンクに対して上記第3垂直軸と第4垂直軸を通る直線上の第5垂直軸を中心として相対回動可能に一端が連結されるとともに、他端が上記移動部材に対して上記移動行程と交差する方向に移動可能とされた第6垂直軸を中心として回動可能に連結された第2リンクアームを含んでおり、
上記第5垂直軸と上記第6垂直軸との軸間距離は、上記第1垂直軸と上記第3垂直軸との軸間距離と等しく設定されており、かつ、
上記第1リンクアームと上記第2リンクアームとは、上記第1リンクアームが回動駆動されるとき、上記第2リンクアームと上記移動部材との連結部の軌跡が、上記水平直線状の移動行程と一致もしくは平行するように連携されていることを特徴とする、直線移動機構。 - ガイド部材と、このガイド部材にスライド可能に支持され、このガイド部材上に設定された水平直線状の移動行程に沿って移動可能な移動部材と、この移動部材を駆動する駆動機構とを備えた直線移動機構であって、
上記駆動機構は、上記ガイド部材における上記移動行程上またはその平行線上の第1垂直軸を中心として回動駆動される第1リンクアームと、上記移動行程上またはその平行線上の上記第1垂直軸と異なる第2垂直軸を中心として回動可能な副リンクアームと、上記第1リンクアームおよび副リンクアームが第3垂直軸および第4垂直軸を中心として相対回動可能に連結される中間リンクとを備えた平行四辺形リンク機構を含むとともに、上記中間リンクに対して上記第3垂直軸と第4垂直軸を通る直線上の第5垂直軸を中心として相対回動可能に一端が連結されるとともに、他端が上記移動部材に対して第6垂直軸を中心として回動可能に連結された第2リンクアームを含んでおり、
上記第5垂直軸と上記第6垂直軸との軸間距離は、上記第1垂直軸と上記第3垂直軸との軸間距離と等しく設定されており、
上記移動部材には、さらに別の補助移動部材が上記移動行程に沿って移動可能に支持されており、上記第2リンクアームは、上記補助移動部材に対し、上記第5垂直軸から第6垂直軸を通ってさらに延びる延長線上の第7垂直軸を中心として相対回動可能で、なおかつ上記第7垂直軸が上記移動行程と交差する方向に変位可能に連結されており、かつ、
上記第1リンクアームと上記第2リンクアームとは、上記第1リンクアームが回動駆動されるとき、上記補助移動部材に対する上記第2リンクアームの回動軸となる上記第7垂直軸の軌跡が、上記移動行程に沿って弧線を描くように連携されていることを特徴とする、直線移動機構。 - ガイド部材と、このガイド部材にスライド可能に支持され、このガイド部材上に設定された水平直線状の移動行程に沿って移動可能な移動部材と、この移動部材を駆動する駆動機構とを備えた直線移動機構であって、
上記駆動機構は、上記ガイド部材における上記移動行程上またはその平行線上の第1垂直軸を中心として回動駆動される第1リンクアームと、上記移動行程上またはその平行線上の上記第1垂直軸と異なる第2垂直軸を中心として回動可能な副リンクアームと、上記第1リンクアームおよび副リンクアームが第3垂直軸および第4垂直軸を中心として相対回動可能に連結される中間リンクとを備えた平行四辺形リンク機構を含むとともに、上記中間リンクに対して上記第3垂直軸と第4垂直軸を通る直線上の第5垂直軸を中心として相対回動可能に一端が連結されるとともに、他端が上記移動部材に対して第6垂直軸を中心として回動可能に連結された第2リンクアームを含んでおり、
上記第5垂直軸と上記第6垂直軸との軸間距離は、上記第1垂直軸と上記第3垂直軸との軸間距離と等しく設定されており、
上記移動部材には、さらに別の補助移動部材が上記移動行程に沿って移動可能に支持されているとともに、上記平行四辺形リンク機構には、上記中間リンクより外側において、上記第1リンクアームおよび副リンクアームに第8垂直軸および第9垂直軸を中心として相対回動可能に連結された補助中間リンクが含まれており、この補助中間リンクには、上記第8垂直軸と第9垂直軸を通る直線上の第10垂直軸を中心として相対回動可能な第3リンクアームが連結されており、この第3リンクアームは、上記補助移動部材に対し、第11垂直軸を中心として相対回動可能に連結されており、かつ、上記第10垂直軸と上記第11垂直軸との軸間距離は、上記第1垂直軸と上記第8垂直軸との軸間距離と等しく設定されており、かつ、
上記第1リンクアームと上記第2リンクアームとは、上記第1リンクアームが回動駆動されるとき、上記第2リンクアームと上記移動部材との連結部の軌跡が、上記水平直線状の移動行程と一致もしくは平行するように連携されているとともに、上記第1リンクアームと上記第3リンクアームとは、上記第1リンクアームが回動するとき、上記補助移動部材に対する上記第3リンクアームの回動軸となる上記第11垂直軸の軌跡が、上記水平直線状の移動行程と一致もしくは平行するように連携されていることを特徴とする、直線移動機構。 - ガイド部材と、このガイド部材にスライド可能に支持され、このガイド部材上に設定された水平直線状の移動行程に沿って移動可能な移動部材と、この移動部材を駆動する駆動機構とを備えた直線移動機構であって、
上記駆動機構は、上記ガイド部材における上記移動行程上またはその平行線上の第1垂直軸を中心として回動駆動される第1リンクアームと、上記移動行程上またはその平行線上の上記第1垂直軸と異なる第2垂直軸を中心として回動可能な副リンクアームと、上記第1リンクアームおよび副リンクアームが第3垂直軸および第4垂直軸を中心として相対回動可能に連結される中間リンクとを備えた平行四辺形リンク機構を含むとともに、上記中間リンクに対して上記第3垂直軸と第4垂直軸を通る直線上の第5垂直軸を中心として相対回動可能に一端が連結されるとともに、他端が上記移動部材に対して上記移動行程と交差する方向に移動可能とされた第6垂直軸を中心として回動可能に連結された第2リンクアームを含んでおり、
上記第5垂直軸と上記第6垂直軸との軸間距離は、上記第1垂直軸と上記第3垂直軸との軸間距離より大きく設定されており、かつ、
上記第1リンクアームと上記第2リンクアームとは、上記第1リンクアームが回動駆動されるとき、上記第2リンクアームと上記移動部材との連結部の軌跡が、上記水平直線状の移動行程に沿って弧線を描くように連携されていることを特徴とする、直線移動機構。 - 上記第1リンクアームには、上記第3垂直軸上に中心をもつ第1ギアが固定されているとともに、上記第2リンクアームには、上記第5垂直軸上に中心をもつとともに上記第1ギアと噛み合い、かつこれと同径の第2ギアが固定されている、請求項1ないし4のいずれかに記載の直線移動機構。
- 上記第1リンクアームには、上記第3垂直軸上に中心をもつ第1間欠ギアが固定されているとともに、上記第2リンクアームには、上記第5垂直軸上に中心をもつとともに上記第1間欠ギアと一時的に噛み合う第2間欠ギアが固定されている、請求項1ないし4のいずれかに記載の直線移動機構。
- 上記第1リンクアームには、上記第3垂直軸上に中心をもつ第1ギアと上記第8垂直軸上に中心をもつ第3ギアとが固定されているとともに、上記第2リンクアームには、上記第5垂直軸上に中心をもつとともに上記第1ギアと噛み合い、かつこれと同径の第2ギアが固定されており、上記第3リンクアームには、上記第10垂直軸上に中心をもつとともに上記第3ギアと噛み合い、かつこれと同径の第4ギアが固定されている、請求項3に記載の直線移動機構。
- 上記第1リンクアームには、上記第3垂直軸上に中心をもつ第1間欠ギアと上記第8垂直軸上に中心をもつ第3間欠ギアとが固定されているとともに、上記第2リンクアームには、上記第5垂直軸上に中心をもつとともに上記第1間欠ギアと一時的に噛み合う第2間欠ギアが固定されており、上記第3リンクアームには、上記第10垂直軸上に中心をもつとともに上記第3間欠ギアと一時的に噛み合う第4間欠ギアが固定されている、請求項3に記載の直線移動機構。
- 請求項1ないし8のいずれかに記載の直線移動機構が固定ベースに対し、上記移動行程上における鉛直状の旋回軸を中心として上記ガイド部材が旋回しうるように支持されているとともに、上記移動部材または補助移動部材には、板状ワークを載置しうるハンドが設けられていることを特徴とする、搬送ロボット。
- 上記直線移動機構はまた、上記固定ベースに対し、上記旋回軸に沿って昇降しうるように支持されている、請求項9に記載の搬送ロボット。
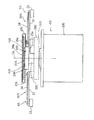
- 上記直線移動機構は、上記固定ベースに対して上記旋回軸を中心として旋回可能な旋回ベースに設けられており、上記移動部材は、上記移動行程に沿って相互に干渉することなく移動可能に上記ガイド部材に支持された第1移動部材および第2移動部材を含んでいるとともに、上記駆動機構は、上記第1移動部材および第2移動部材をそれぞれ駆動するように上記旋回ベースに設けられた第1駆動機構および第2駆動機構を含んでいる、請求項9または10に記載の搬送ロボット。
- 上記第1駆動機構および上記第2駆動機構は、上記移動行程に対して対称に配置されている、請求項11に記載の搬送ロボット。
- 上記ガイド部材には、上記第1移動部材を移動可能に支持し、上記移動行程を挟んで位置する一対の第1ガイドレールと、上記第2移動部材を移動可能に支持し、上記一対の第1ガイドレールの外側において上記移動行程を挟んで位置する一対の第2ガイドレールとを備えている、請求項11または12に記載の搬送ロボット。
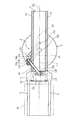
- 上記第1移動部材および上記第2移動部材は、それぞれ、ハンドの基部を支持するハンド支持部を備えている一方、上記第2移動部材のハンド支持部は、上記第1移動部材のハンド支持部より上位に位置しているとともに、上記第2移動部材は、そのハンド支持部の両側部から上記第1移動部材のハンド支持部の両側部を迂回して延びる一対の支持アームを介して上記一対の第2ガイドレールに支持されている、請求項13に記載の搬送ロボット。
- 上記第1移動部材は、上記一対の第2ガイドレールの内側において、上記ガイド部材を貫通して延びる連結アームを備え、この連結アームを介して上記第1駆動機構の第2リンクアームに連結されている一方、上記第2移動部材は、上記一対の支持アームの適部において上記第2駆動機構の第2リンクアームに連結されている、請求項14に記載の搬送ロボット。
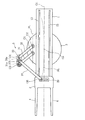
- 上記補助移動部材は、上記第2移動部材に支持されており、上記第1移動部材および上記補助移動部材は、それぞれ、ハンドの基部を支持するハンド支持部を備えている一方、上記補助移動部材のハンド支持部は、上記第1移動部材のハンド支持部より上位に位置しているとともに、上記補助移動部材を支持する上記第2移動部材は、その両側部から上記第1移動部材のハンド支持部の両側部を迂回して延びる一対の支持アームを介して上記一対の第2ガイドレールに支持されている、請求項13に記載の搬送ロボット。
- 上記第1移動部材は、上記一対の第2ガイドレールの内側において、上記ガイド部材を貫通して延びる連結アームを備え、この連結アームを介して上記第1駆動機構の第2リンクアームに連結されている一方、上記第2移動部材は、上記一対の支持アームの適部において上記第2駆動機構の第2リンクアームに連結されており、かつ、上記補助移動部材は、上記移動行程と交差する方向に長手状の案内溝を介して上記第2駆動機構の第2リンクアームに連結されている、請求項16に記載の搬送ロボット。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004052902A JP4291709B2 (ja) | 2003-04-16 | 2004-02-27 | 直線移動機構およびこれを用いた搬送ロボット |
| US10/825,267 US7306423B2 (en) | 2003-04-16 | 2004-04-14 | Linear moving mechanism and transfer robot using the same |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003111967 | 2003-04-16 | ||
| JP2003341137 | 2003-09-30 | ||
| JP2004052902A JP4291709B2 (ja) | 2003-04-16 | 2004-02-27 | 直線移動機構およびこれを用いた搬送ロボット |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005125479A JP2005125479A (ja) | 2005-05-19 |
| JP2005125479A5 JP2005125479A5 (ja) | 2007-03-08 |
| JP4291709B2 true JP4291709B2 (ja) | 2009-07-08 |
Family
ID=34139360
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004052902A Expired - Fee Related JP4291709B2 (ja) | 2003-04-16 | 2004-02-27 | 直線移動機構およびこれを用いた搬送ロボット |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7306423B2 (ja) |
| JP (1) | JP4291709B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7427351B2 (ja) | 2017-12-05 | 2024-02-05 | 日本製鉄株式会社 | 積鉄心 |
Families Citing this family (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4490341B2 (ja) * | 2005-07-05 | 2010-06-23 | 株式会社ダイヘン | リンク装置および搬送ロボット |
| JP4440178B2 (ja) * | 2005-07-25 | 2010-03-24 | 東京エレクトロン株式会社 | 基板の搬送装置 |
| JP4666215B2 (ja) | 2005-08-10 | 2011-04-06 | 株式会社ダイフク | 物品搬送装置 |
| JP4697791B2 (ja) * | 2005-11-07 | 2011-06-08 | 株式会社アルバック | 基板搬送装置 |
| JP2007250196A (ja) * | 2006-03-13 | 2007-09-27 | Ricoh Co Ltd | 搬送装置及び真空プロセス装置 |
| DE102006038505A1 (de) * | 2006-08-16 | 2008-02-21 | Kmb Produktions Ag | Vorrichtung zum Versetzen von Gegenständen |
| JP5041207B2 (ja) * | 2006-11-14 | 2012-10-03 | 株式会社ダイフク | 物品搬送設備 |
| WO2008120294A1 (ja) | 2007-03-02 | 2008-10-09 | Daihen Corporation | 搬送装置 |
| JP5171093B2 (ja) * | 2007-04-05 | 2013-03-27 | 株式会社アルバック | 搬送装置 |
| JP5075459B2 (ja) * | 2007-04-17 | 2012-11-21 | 株式会社アルバック | 搬送装置 |
| KR101071606B1 (ko) | 2007-04-05 | 2011-10-10 | 가부시키가이샤 알박 | 반송 장치 |
| JP4950745B2 (ja) * | 2007-04-19 | 2012-06-13 | 株式会社ダイヘン | 搬送装置 |
| JP4908306B2 (ja) * | 2007-05-10 | 2012-04-04 | 株式会社ダイヘン | 搬送装置 |
| JPWO2008140093A1 (ja) * | 2007-05-15 | 2010-08-05 | 株式会社アルバック | 搬送装置及びこれを用いた真空処理装置 |
| JP4971063B2 (ja) | 2007-07-27 | 2012-07-11 | 株式会社ダイヘン | 搬送装置 |
| JP4918430B2 (ja) * | 2007-08-03 | 2012-04-18 | 株式会社アルバック | 基板搬送装置 |
| JP4824645B2 (ja) * | 2007-08-03 | 2011-11-30 | 株式会社アルバック | 基板搬送装置 |
| JP4824648B2 (ja) * | 2007-08-07 | 2011-11-30 | 株式会社アルバック | 基板搬送装置 |
| DE102007039398B4 (de) * | 2007-08-21 | 2009-11-12 | Saadat, Mohammad Mohsen, Prof. Dr.-Ing. | Greifmechanismus für Roboter, Maschinen und Handhabungsgeräte |
| CN101417747B (zh) * | 2008-12-11 | 2011-11-23 | 友达光电股份有限公司 | 传送台机构 |
| US8285418B2 (en) * | 2009-07-23 | 2012-10-09 | Kla-Tencor Corporation | Dual scanning stage |
| JP5419581B2 (ja) * | 2009-07-31 | 2014-02-19 | 東京エレクトロン株式会社 | 搬送機構の組み立て方法および搬送室 |
| USRE43781E1 (en) * | 2009-11-17 | 2012-11-06 | Ulvac, Inc. | Vacuum transfer robot |
| USD639323S1 (en) * | 2010-05-06 | 2011-06-07 | Ulvac, Inc. | Vacuum transfer robot |
| USRE44567E1 (en) * | 2009-11-17 | 2013-11-05 | Ulvac, Inc. | Vacuum transfer robot |
| USD625748S1 (en) * | 2010-05-06 | 2010-10-19 | Ulvac, Inc. | Vacuum transfer robot |
| CN102092045B (zh) * | 2009-12-15 | 2012-09-05 | 北京北方微电子基地设备工艺研究中心有限责任公司 | 一种基片处理系统及其机械手臂装置 |
| TWI395633B (zh) * | 2010-04-23 | 2013-05-11 | 私立中原大學 | 肘節式定位平台 |
| GB2486486A (en) * | 2010-12-17 | 2012-06-20 | Uhv Design Ltd | Work piece transfer mechanism with a linear stroke |
| CN102530556B (zh) * | 2010-12-20 | 2015-06-24 | 理想能源设备(上海)有限公司 | 基板传输装置、基板传输方法及基板传输系统 |
| EP2469339B1 (en) | 2010-12-21 | 2017-08-30 | ASML Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| JP2012218144A (ja) * | 2011-04-11 | 2012-11-12 | Komiyama Electron Co Ltd | 搬送装置 |
| CN202072285U (zh) * | 2011-05-24 | 2011-12-14 | 深圳市华星光电技术有限公司 | 面板传送装置及其面板支撑机构 |
| EP3100958B1 (en) | 2011-10-24 | 2018-04-18 | Remedi Technology Holdings, LLC | Packaging system for pharmaceutical dispenser and associated method |
| JP5663638B2 (ja) | 2012-10-11 | 2015-02-04 | 株式会社ティーイーエス | 基板移送装置 |
| CN103811385B (zh) * | 2012-11-08 | 2016-06-29 | 沈阳新松机器人自动化股份有限公司 | 一种用于运送晶圆的机械手机构 |
| US10224232B2 (en) | 2013-01-18 | 2019-03-05 | Persimmon Technologies Corporation | Robot having two arms with unequal link lengths |
| US9149936B2 (en) * | 2013-01-18 | 2015-10-06 | Persimmon Technologies, Corp. | Robot having arm with unequal link lengths |
| JP6063776B2 (ja) * | 2013-03-04 | 2017-01-18 | 東京エレクトロン株式会社 | 基板搬送経路の決定方法、基板搬送装置、基板処理装置及びプログラム |
| KR101515908B1 (ko) | 2013-07-29 | 2015-04-29 | 주식회사 티이에스 | 기판이송장치 |
| KR20230104993A (ko) * | 2014-01-17 | 2023-07-11 | 브룩스 오토메이션 인코퍼레이티드 | 기판 이송 장치 |
| JP6276090B2 (ja) * | 2014-03-31 | 2018-02-07 | 株式会社ダイヘン | 搬送装置、搬送システム |
| JP6474971B2 (ja) * | 2014-07-03 | 2019-02-27 | 株式会社ダイヘン | ワーク搬送装置 |
| KR102567510B1 (ko) | 2015-03-12 | 2023-08-17 | 퍼시몬 테크놀로지스 코포레이션 | 종속화된 엔드 이펙터 움직임을 가진 로봇 |
| US10470841B2 (en) | 2017-03-28 | 2019-11-12 | Steris Inc. | Robot-based rack processing system |
| USD892881S1 (en) * | 2018-03-29 | 2020-08-11 | Daihen Corporation | Power transmission unit and power receiving unit of an industrial robot arm |
| JP1612908S (ja) * | 2018-03-29 | 2018-09-03 | ||
| JP1619125S (ja) * | 2018-03-29 | 2018-11-26 | ||
| JP1612766S (ja) * | 2018-03-29 | 2018-09-03 | ||
| JP1612912S (ja) * | 2018-03-29 | 2018-09-03 | ||
| TWI758595B (zh) | 2018-03-31 | 2022-03-21 | 日商平田機工股份有限公司 | 腔室構造 |
| CN110960807B (zh) * | 2019-12-05 | 2022-03-04 | 上海联影医疗科技股份有限公司 | 一种医用直线加速器系统 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2808826B2 (ja) * | 1990-05-25 | 1998-10-08 | 松下電器産業株式会社 | 基板の移し換え装置 |
| JPH106258A (ja) | 1996-06-19 | 1998-01-13 | Metsukusu:Kk | 薄型ワークの搬送用ロボット |
| US6910847B1 (en) * | 2002-07-19 | 2005-06-28 | Nanometrics Incorporated | Precision polar coordinate stage |
-
2004
- 2004-02-27 JP JP2004052902A patent/JP4291709B2/ja not_active Expired - Fee Related
- 2004-04-14 US US10/825,267 patent/US7306423B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7427351B2 (ja) | 2017-12-05 | 2024-02-05 | 日本製鉄株式会社 | 積鉄心 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050036877A1 (en) | 2005-02-17 |
| US7306423B2 (en) | 2007-12-11 |
| JP2005125479A (ja) | 2005-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4291709B2 (ja) | 直線移動機構およびこれを用いた搬送ロボット | |
| JP4971063B2 (ja) | 搬送装置 | |
| EP1498228B1 (en) | Articulated robot | |
| JP4955447B2 (ja) | 搬送装置 | |
| JP2008135630A (ja) | 基板搬送装置 | |
| KR101512912B1 (ko) | 반송 로봇 | |
| TWI508213B (zh) | A carrying arm and a handling robot having the carrying arm | |
| US20080023293A1 (en) | Linear transfer mechanism and transfer robot using the same | |
| US7946799B2 (en) | Transfer apparatus | |
| JP2013000839A (ja) | 搬送ロボット | |
| JP2008264923A (ja) | 搬送装置 | |
| JP4369851B2 (ja) | 直線移動機構およびこれを用いた搬送ロボット | |
| WO2010041562A1 (ja) | 基板搬送ロボットおよびシステム | |
| WO2016189565A1 (ja) | 水平多関節ロボット | |
| TWI581929B (zh) | Substrate transfer robot and its operation method | |
| JP4276534B2 (ja) | 搬送ロボット | |
| JP4515133B2 (ja) | 搬送装置及びその制御方法並びに真空処理装置 | |
| KR101193761B1 (ko) | 다관절 로봇 | |
| JP2005186259A5 (ja) | ||
| JP6557475B2 (ja) | 産業用ロボット | |
| US7018162B2 (en) | Articulated carrying device | |
| JP2013130219A (ja) | 直動機構および直動機構を備えたロボット | |
| JP5255683B2 (ja) | 搬送装置 | |
| JP4879833B2 (ja) | 搬送装置 | |
| JP2003094359A (ja) | リンク形ワーク搬送用ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070122 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070122 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080619 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080715 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080916 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090331 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090403 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4291709 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120410 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120410 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130410 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130410 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140410 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |