JP4260278B2 - ベルト式無段変速機のvプーリ制御機構 - Google Patents
ベルト式無段変速機のvプーリ制御機構 Download PDFInfo
- Publication number
- JP4260278B2 JP4260278B2 JP09210299A JP9210299A JP4260278B2 JP 4260278 B2 JP4260278 B2 JP 4260278B2 JP 09210299 A JP09210299 A JP 09210299A JP 9210299 A JP9210299 A JP 9210299A JP 4260278 B2 JP4260278 B2 JP 4260278B2
- Authority
- JP
- Japan
- Prior art keywords
- clutch
- pulley
- cam
- control mechanism
- piston
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/04—Final output mechanisms therefor; Actuating means for the final output mechanisms a single final output mechanism being moved by a single final actuating mechanism
- F16H63/06—Final output mechanisms therefor; Actuating means for the final output mechanisms a single final output mechanism being moved by a single final actuating mechanism the final output mechanism having an indefinite number of positions
- F16H63/067—Final output mechanisms therefor; Actuating means for the final output mechanisms a single final output mechanism being moved by a single final actuating mechanism the final output mechanism having an indefinite number of positions mechanical actuating means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/04—Final output mechanisms therefor; Actuating means for the final output mechanisms a single final output mechanism being moved by a single final actuating mechanism
- F16H63/06—Final output mechanisms therefor; Actuating means for the final output mechanisms a single final output mechanism being moved by a single final actuating mechanism the final output mechanism having an indefinite number of positions
- F16H63/062—Final output mechanisms therefor; Actuating means for the final output mechanisms a single final output mechanism being moved by a single final actuating mechanism the final output mechanism having an indefinite number of positions electric or electro-mechanical actuating means
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transmissions By Endless Flexible Members (AREA)
Description
【発明の属する技術分野】
本発明は、自動車などの車両の変速機として用いられるベルト式無段変速機のVプーリ制御機構の改良に関する。
【0002】
【従来の技術】
近年、自動車などの車両の変速機として、従来のオートマチックトランスミッション(AT)に代えて、無段階で変速できるベルト式無段変速機が用いられるようになってきた。これは、ベルト式無段変速機は変速ショックがほとんどなく、ATに比べて伝達効率が高く、低燃費が実現できるためである。
【0003】
ベルト式無段変速機の一例としては、可変V溝を有する2個のプーリと、両プーリ間に掛け渡した無端状の金属ベルトとからなるVベルト式無段変速機があり、プーリ溝幅を無段階で変化させることで無段階の変速比を得ている。
【0004】
このような従来のベルト式無段変速機としては、例えば、図10に示すVベルト式無段変速機のVベルト制御機構がある。図10では、電動モータ等の駆動モータ100からのトルクを複数のギアを介してネジ機構101でスラスト方向の力に変換する。変換されたトルクは、軸方向に移動自在の可動シーブ103と固定シーブ104とからなるVプーリ102の可動シーブ103をスラスト方向に移動させ、Vプーリ102の幅を広げたり狭めたりして、所望の変速比を得ている。
【0005】
また、図11に示す従来のVベルト式無段変速機のVベルト制御機構では、図10のネジ機構の部分をボールネジ機構106に置き換え、駆動モータ105との間にウォームネジ部107を設けて逆転防止機構を付加している。
【0006】
【発明が解決しようとする課題】
プライマリのVプーリの可動シーブは、Vベルトの張力とセカンダリプーリのバネ力とによりVプーリが広がる方向へ常に付勢されている。駆動モータ停止時、可動シーブの戻りを止めるためネジ部のリード角を小さくして対策をするが、このようにすると回転トルクをスラスト力に変換する効率が下がってしまう恐れがある。また、Vプーリの可動シーブの駆動部のネジ機構をボールネジとすると、回転トルク→スラスト力、スラスト力→回転トルクの変換効率は高まるがVプーリ可動シーブの戻り防止のためVプーリと駆動モータ間に逆転防止のためのウォームギアを入れる必要が生じ、このため駆動モータの回転トルク←→可動シーブのスラスト力の変換効率が低下してしまう恐れがある。
【0007】
従って、本発明の目的は、駆動モータの回転トルクから可動シーブのスラスト力へ、また可動シーブのスラスト力から駆動モータの回転トルクへの変換効率を低下させることなく、可動シーブの戻り防止(駆動モータの逆転防止)ができるベルト式無段変速機のVプーリ制御機構を提供することである。
【0008】
【課題を解決するための手段】
上記目的を達成するため、本発明のベルト式無段変速機のVプーリ制御機構は、
ベルト式無段変速機のVプーリをモータにより駆動制御するVプーリ制御機構において、前記Vプーリ制御機構は、前記モータと前記Vプーリ間に配置され、クラッチ締結部と、該クラッチ締結部により締結自在のクラッチ機構と、ワンウェイクラッチ部とを備えていることを特徴としている。
【0009】
【発明の実施の態様】
プライマリのVプーリ幅を狭める駆動モータの回転方向を仮に正転方向とすると、駆動モータの正転時、クラッチ締結部はクラッチ機構を締結させ、この時の回転方向はワンウェイクラッチの空転方向なのでクラッチ機構とワンウェイクラッチ部一体で回転し、Vプーリへトルクを伝達し、可動シーブを固定シーブ側へ移動させる。駆動モータの逆転時には、クラッチ締結部はクラッチ機構を解放させ、可動シーブは固定シーブから離れる。駆動モータの停止時、可動シーブからの回転はクラッチ締結部に伝えられ、クラッチ機構を締結させ、クラッチ機構及びワンウェイクラッチ部は一体で回転しようとするが、回転方向はワンウェイクラッチの噛み合い方向だけなので、可動シーブからの回転は止められ、可動シーブの戻りは発生しない。また、駆動モータの逆転を防止できる。
【0010】
本発明は、ベルト式無段変速機のVプーリ(1)をモータ(19)により駆動制御するVプーリ制御機構(10,30,50)において、Vプーリ制御機構は、モータとVプーリ間に配置され、クラッチ締結部(13,23,25,35;12,22,26)と、クラッチ締結部により締結自在のクラッチ機構(17,18)と、ワンウェイクラッチ部(27)とを備えていることを特徴とする。
【0011】
また、クラッチ締結部はネジ機構(12b、13b)を有することを特徴とする。
また、クラッチ締結部はボールネジ機構(22b、23b)を有することを特徴とする。
更に、クラッチ締結部は、カム機構(26a,24,25a)を有することを特徴とする。
更にまた、Vプーリの可動シーブ(3)は、第2のボールネジ機構(5)により軸方向に押圧自在であることを特徴とする。
【0012】
【実施例】
以下、本発明の各実施例を添付図面を参照して詳細に説明する。尚、図中同一部分は同一符号で示している。
【0013】
(第1実施例)
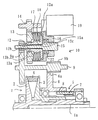
図1は、本発明の第1実施例にかかるベルト式無段変速機のVプーリ制御機構を示す軸方向断面図である。Vプーリ制御機構10は、ベルト式無段変速機のプライマリプーリであり、断面空間がV字型をなすVプーリ1を制御するものである。
【0014】
Vプーリ1は、半径方向外方に向かって傾斜する環状の斜面を有する固定シーブ2と、軸方向に移動自在であり、固定シーブ2の斜面と対向し断面でV字型の空間を画成する斜面を有する可動シーブ3とを有する。固定シーブ2と可動シーブ3との間に画成される環状のV字空間には、断面V字型で無端状のVベルト4が係合している。Vベルト4としては、例えば、金属製の摩擦式湿式タイプや樹脂製の乾式複合タイプ等のベルトが使用できる。
【0015】
Vベルト4は、他方でセカンダリプーリ(不図示)に係合しており、不図示のエンジンからの入力トルクは、入力軸(不図示)→Vプーリ1→Vベルト4→セカンダリプーリ→出力軸(不図示)→車輪等(不図示)の経路で伝達する。この時、変速比はプライマリプーリであるVプーリ1の可動シーブ3の固定シーブ2に対する軸方向での開き度によって決定される。例えば、Vプーリ1の可動シーブ3が開いて(図1で軸方向右に移動)Vベルト4が軸方向内方に位置すると、不図示のセカンダリプーリに対してはVベルト4は半径方向で最外方に位置する。この場合、変速比はロー状態になる。
【0016】
これとは逆に、Vプーリ1において、図1に示す位置にVベルト4が位置する場合(可動シーブ3が最も閉じた状態)は、セカンダリプーリ側ではVベルト4は半径方向で最内方に位置し、変速比はオーバードライブ状態となる。尚、上述の無段変速機の動作は以下の実施例についても同様である。
【0017】
Vプーリ1の可動シーブ3を軸方向に移動させる機構は、ボールネジ機構5である。ボールネジ機構5は、固定シーブ2と一体の軸部1aに対して回転自在であるが軸方向には固定され、外周面にボール溝が刻設された内側スリーブ7と、内側スリーブ7が嵌合され、内周面にボール溝が刻設された外側スリーブ6と、内側スリーブ7のボール溝と外側スリーブ6のボール溝との間に介装されるボール8とからなる。
【0018】
外側スリーブ6のギア部6aは、後述するVプーリ制御機構10からの駆動力により回転する。外側スリーブ6の回動に伴い、ボールネジ機構5により、外側スリーブ6は軸方向に移動する。その際、軸受を介して外側スリーブ6と一体になった可動シーブ3も軸方向に移動する。これにより、V字空間の開き度が変化し、Vベルト4が半径方向に変位する。その結果、変速比が変化し、車両の減速または増速が行われる。尚、可動シーブ3の駆動部をボールネジ機構5としたので、回転トルク→スラスト力、スラスト力→回転トルクの変換効率が向上する。
【0019】
次に、Vプーリ制御機構10を詳細に説明する。図1に示すように、Vプーリ制御機構10は、駆動モータ、すなわちDC(直流)モータなどの電動モータ19を備えており、電動モータ19の回転トルクは、電動モータ19の回転軸と一体のギア14、ギアと噛合するクラッチ締結部材13、固定軸15に回転自在に嵌合したピストン12、ピストン12と噛合するギア部9aを備えた中間軸9へと伝達される。その後、不図示の部材に枢支された中間軸9のギア部9bと噛合する外側スリーブ6のギア部6aにより、ボールネジ機構5を介して回転力がスラスト力に変換され、可動シーブ3が軸方向に移動する。
【0020】
クラッチ締結部13の内周にはネジ部13bが設けられピストン12の外周に設けられたネジ部12bと噛合している。また、ピストン12は、その軸方向の端部に半径方向外方に延在するほぼ環状のフランジ部12aを備えている。固定軸15には、ハウジング16が回動可能に嵌合しており、ハウジング16と固定軸15との間にはワンウェイクラッチ部27が設けられ、固定軸15に嵌合している。クラッチ締結部13は、ピストン12のフランジ部12aに対して軸方向で対向する位置に突起13aを有する。
【0021】
ハウジング16の内周にはスプラインが設けられ、環状のセパレータプレート17が嵌合している。また、ピストン12のネジ部12bとフランジ部12aとの間の外周にスプライン12cが設けられ、環状のフリクションプレート18が嵌合している。セパレータプレート17とフリクションプレート18とは交互に対向して配置されている。本実施例では、フリクションプレートが2枚、セパレータプレートが3枚設けられているが、それぞれの枚数は限定されるものではなく、必要なトルクに応じて決定できる。また、フリクションプレート18には、必要な摩擦力を得るため、両面もしくは片面に摩擦材(不図示)が貼着されている。
【0022】
以上のような構成で、クラッチ機構を構成するフリクションプレート18とセパレータプレート17との密着は以下のように行われる。まず、電動モータ19の正転時、クラッチ締結部13が、ネジ部13bとネジ部12bとの噛合により、図1において、右方向に移動する。この時、ピストン12は、固定軸15の段部15aにより軸方向の移動を制限されているので、クラッチ締結部13が移動するにつれ、突起13aは、ピストン12のフランジ部12aとの間でセパレータプレート17とフリクションプレート18とを押圧締結させる。
【0023】
クラッチ機構が締結されると、クラッチ機構とワンウェイクラッチ部27で一体となって回転するようになり、この回転力は、ピストン12、ギア9aを介して、中間軸9に伝達される。中間軸9に伝達された回転トルクは、ボールネジ機構5によりスラスト力に変換され、Vプーリ1へトルクを伝達し、可動シーブ3を固定シーブ2側へ移動させる。
【0024】
電動モータの逆転時には、クラッチ締結部13は、図1で軸方向で左に移動するので、フリクションプレート18とセパレータプレート17との摩擦係合が解かれ、クラッチ機構が解放される。この結果、Vプーリ1の可動シーブ3は固定シーブ2から離れる始める。従って、変速比はローからオーバードライブ方向へ変化する。
【0025】
車両の走行時(例えば定速走行時等)、電動モータ19が停止した場合、可動シーブ3からの回転はクラッチ締結部13に伝えられ、ピストン12を介してクラッチ機構を締結させ、クラッチ機構及びワンウェイクラッチ部27は一体で回転しようとするが、この時の回転はワンウェイクラッチ部27の噛み合い方向だけが回転可能であるので、可動シーブ3からの回転はワンウェイクラッチ部27で止められ、可動シーブ3の戻りによる回転力は、電動モータ19には伝達されない。従って、電動モータ19の逆転が防止できる。従って、回転トルクからスラスト力へ、またスラスト力から回転トルクへの変換効率を低下させることなく、可動シーブの戻り防止(駆動モータの逆転防止)ができる。
【0026】
(第2実施例)
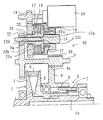
図2は、本発明の第2実施例にかかるベルト式無段変速機のVプーリ制御機構30を示す軸方向断面図である。基本的な構成は第1実施例の場合と同じであるので、その部分については説明を省く。
【0027】
本実施例では、Vプーリ制御機構30のクラッチ締結機構が第1実施例と異なる。ハウジング16の内周に設けたスプラインに嵌合したセパレータプレート17とピストン22のスプライン22cに係合するフリクションプレート18とからなるクラッチ機構を締結するクラッチ締結部材23及びピストン22は、第1実施例と同様に電動モータ19からの駆動力により軸方向に相対移動して互いに接近、離隔する。
【0028】
しかしながら、第2実施例ではクラッチ締結部材13の内周には、ネジ部ではなく、ボール28の転動するボール溝23bが刻設されている。これに対応して、ピストン22の外周にはボール溝22bが刻設されている。従って、ボール溝23bとボール溝22bとの間でボール28が転動することで、クラッチ締結部材23とピストン22とを軸方向に相対移動させるボールネジ機構を構成する。
【0029】
ボールネジ機構により相対移動するクラッチ締結部材23の突起23aとピストン22のフランジ部22aとの間でセパレータプレート17とフリクションプレート18とが互いに押圧されることで、クラッチ機構の締結が行われる。また、電動モータ19が逆回転することで、クラッチ締結部材23が離隔すると、クラッチ機構は解放される。第2実施例では、クラッチ締結部材23とピストン22との間にボールネジ機構を設けたので、電動モータ19からの回転トルクをスラスト力に変換することができ、クラッチ機構の締結及び解放がより円滑に行われる。また、可動シーブ3を駆動するためとクラッチ機構を締結・解放するためにボールネジ機構を用いたので、回転トルクとスラスト力の変換効率が全体として向上する。
【0030】
(第3実施例)
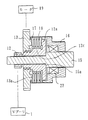
図3は、本発明の第3実施例にかかるベルト式無段変速機のVプーリ制御機構50を示す軸方向断面図である。基本的な構成は第1及び第2実施例の場合と同じであるので、その部分については説明を省く。
【0031】
本実施例では、Vプーリ制御機構50のクラッチ締結機構が第1及び第2実施例と異なる。セパレータプレート17とフリクションプレート18とからなるクラッチ機構を締結するクラッチ締結部材25及びピストン26は、第1及び第2実施例と同様に電動モータ19からの駆動力により軸方向に相対移動して互いに接近、離隔をする。
【0032】
しかしながら、第3実施例ではクラッチ締結部材25の内周には、ネジ部もボール溝も設けられていない。また、ピストン26の外周もこれと対応して何も設けられていない。本実施例では、クラッチ機構を締結するための手段として、クラッチ締結部材25のクラッチ機構に対向した軸方向端面にカム溝25a、またピストンのカム溝25aに対向した軸方向端面にカム溝26aを設け、その間にボールカム24を介装する。
【0033】
電動モータ19が駆動(正転)されると、上述のカム機構によりクラッチ締結部材25に対してピストン26は、図3において軸方向で右方向に移動する。その後、ピストンの軸方向端面に設けられた突起26bがセパレータプレート17に当接する。この状態で更にカム機構からのカム圧がかかると、セパレータプレート17とフリクションプレート18との摩擦係合が始まり、ハウジング16の軸方向端面16aとの間でセパレータプレート17とフリクションプレート18との摩擦係合が達成され、クラッチ機構が締結される。この結果、電動モータの回転トルクが複数のギアを介して、Vプーリ1にスラスト力として伝達され、溝幅が変化し、必要な変速比が得られる。本実施例では、クラッチ締結部材25は不図示の機構により軸方向に固定されている。また、ピストン26は、固定軸15により軸方向の移動を制限されていないが、クラッチ機構を締結することで移動が制限される。
【0034】
第3実施例においても、上述のカム機構により電動モータ19の回転トルクは、クラッチ機構を締結するためのスラスト力に変換される。尚、図8及び図9に示すように、カム機構はボールカムでなくローラカムでもよい。
【0035】
(クラッチ機構の他例)
図4は、本発明のVプーリ制御機構に適用可能なクラッチ機構の変形例を示す軸方向断面図である。基本的な構成は図1に示す第1実施例と同じであるが、クラッチ機構の構成が異なる。尚、クラッチ締結部13と電動モータ19との間の構成及びピストン12とVプーリ1との間の構成は、第1実施例とほぼ同様のため図示を省略してある。
【0036】
図4では、セパレータプレート17を4枚設け、その間にフリクションプレートを3枚、それぞれ互いに交互になるよう配置した。上述の実施例に比べてプレートの枚数が多いので、より大きな回転トルクに対応できる。
【0037】
図5は、本発明のVプーリ制御機構に適用可能なクラッチ機構の他の変形例を示す軸方向断面図である。基本的な構成は図1に示す第1実施例と同じであるが、クラッチ機構の構成が異なる。尚、クラッチ締結部13と電動モータ19との間の構成及びピストン12とVプーリ1との間の構成は、第1実施例とほぼ同様のため図示を省略してある。
【0038】
図5では、セパレータプレート17を4枚設け、その間にフリクションプレートを3枚、それぞれ互いに交互になるよう配置した。上述の実施例に比べてプレートの枚数が多いので、より大きな回転トルクに対応できる。また、この例では、クラッチ締結部材13には突起13aがない。本例では、クラッチ機構のハウジング16の内周のクラッチ締結部材13寄りの軸方向端部にセパレータプレート17のストッパー機能を備えたスナップリング29が嵌合している。
【0039】
従って、クラッチ機構の締結は、ピストン12のフランジ部12aとスナップリング29との間で、セパレータプレート17とフリクションプレート18とが摩擦係合することで行われる。すなわち、電動モータ19の駆動により、クラッチ締結部材13が回動すると、ネジ機構によりピストン12は図5で軸方向で左方向に移動する。これにより、ピストン12のフランジ部12aとスナップリング29との間でセパレータプレート17とフリクションプレート18とが摩擦係合され、クラッチ機構が締結される。この結果、電動モータの回転トルクが複数のギアを介して、Vプーリ1にスラスト力として伝達される。
【0040】
図4及び図5に示す実施例では、ピストン12とクラッチ締結部材13との結合はネジ機構で行っているが、これは、図2に示すボールネジ機構に置き換えることも勿論可能である。
【0041】
(カム機構の詳細)
図6は、第3実施例のカム機構に用いられる、ピストン26を示す図であり、(a)はカム面を示す正面図、(b)は軸方向断面図、(c)は背面図、(d)はボールカムの係合方向及び離脱方向を示す断面図である。図7は、第3実施例のカム機構に用いられる、クラッチ締結部材25を示す図であり、(a)は軸方向断面図、(b)はカム面を示す正面図である。
【0042】
ピストン26は、円筒形の貫通孔26eを有するシリンダー部材であり、貫通孔26eには、固定軸15が嵌合する。従って、ピストン26は固定軸15に回動自在に支持されている。ピストン26の軸方向の一端にはギア部26dが設けられ、図3に示すように中間軸9のギア部9aと噛合している。
【0043】
ピストン26の軸方向の他端の外周にはスプライン26cが設けられ、複数のフリクションプレート18が嵌合している。ピストン26の中間部には環状のフランジ部26fが設けられている。フランジ部26fの軸方向でスプライン26c側には、突起26bが設けられている。突起26bは、ピストン26の軸方向移動によるクラッチ機構の締結時にセパレータプレート17もしくはフリクションプレート18を押圧する。
【0044】
フランジ部26fの軸方向でクラッチ締結部材25に対向するカム面にはカム溝26aが設けられている。カム溝26aは、図6の(a)から分かるように、周方向でほぼ等分に4個設けられている。しかしながら、カム溝26aの個数や形状は任意であり、図示のものに限定されるものではないことは言うまでもない。
【0045】
ボールカム24を介してピストン26とカム機構を構成するクラッチ締結部材25を示すのが図7である。クラッチ締結部材25は、ほぼ環状の部材であり、中央に固定軸15に嵌合する貫通孔25cが設けられている。クラッチ締結部材25の外周にはギア部25bが設けられ、電動モータ19の回転軸14と噛合し、電動モータ19の回転トルクを受ける。
【0046】
クラッチ締結部材25のピストン26のカム面に対向する軸方向端面は、カム面となっており、カム溝25aが設けられている。カム溝25aは、図7の(b)から分かるように、周方向でほぼ等分に4箇所に設けられている。しかしながら、カム溝25aの数や形状は任意であり、ピストン26のカム溝26aに対応するものであれば、図示のものに限定されるものではないことは言うまでもない。
【0047】
ここで、上述のカムの動きを説明する。図6の(d)に示すように、カム溝25aとカム溝26aとで挟まれたボールカム24は、カム溝間で転動する。矢印A方向に、ピストン26とクラッチ締結部材25とがそれぞれ移動すると、カムは離脱状態となり、矢印B方向に移動するとカムは係合状態となり、クラッチ機構に対して締結するための軸方向の押圧力を発生する。
【0048】
図8は、第3実施例のカム機構に用いることができるピストン36を示す図であり、ここでは、カム部材としてボールではなく、半径方向外方に拡径するテーパ形状を有するローラ(ころ)を用いている。図8で、(a)はカム面を示す正面図、(b)は軸方向断面図、(c)は背面図、(d)は、カム面の断面図、(e)はローラカムの係合方向及び離脱方向を示す断面図である。図9は、図8のピストン36と共に用いられる、クラッチ締結部材35を示す図であり、(a)は軸方向断面図、(b)はカム面を示す正面図、(c)はカム面の断面図である。
【0049】
ピストン36は、円筒形の貫通孔36eを有するシリンダー部材であり、貫通孔36eには、固定軸15が嵌合する。従って、ピストン36は固定軸15に回動自在に支持されている。ピストン36の軸方向の一端にはギア部36dが設けられ、図3に示す中間軸9のギア部9aと噛合する。
【0050】
ピストン36の軸方向の他端の外周にはスプライン36cが設けられ、複数のフリクションプレート18が嵌合している。ピストン36の中間部には環状のフランジ部36eが設けられている。フランジ部36eの軸方向でスプライン36c側には、突起36bが設けられている。突起36bは、ピストン36の軸方向移動によるクラッチ機構の締結時にセパレータプレート17もしくはフリクションプレート18を押圧する。
【0051】
フランジ部36eの軸方向でクラッチ締結部材35(図9参照)に対向するカム面には貫通孔36eから半径方向外周縁に向かって延在するカム溝36aが設けられている。カム溝36aは、図8の(a)から分かるように、周方向でほぼ等分に4箇所に設けられている。しかしながら、カム溝36aの数や形状は任意であり、図示のものに限定されるものではないことは言うまでもない。また、図8の(d)に示すように、カム溝36aは、カムローラ34の転動する、傾斜部と、傾斜部と一体に連続する平坦部とからなっている。
【0052】
図8の(e)に示すように、カム溝35aとカム溝36aとで挟まれたカムローラ34は、カム溝間で転動する。矢印A方向に、ピストン36とクラッチ締結部材35とがそれぞれ移動すると、カムは離脱状態となり、矢印B方向に移動するとカムは係合状態となり、クラッチ機構に対して締結するための軸方向の押圧力を発生する。
【0053】
カムローラ34を介してピストン36とカム機構を構成するクラッチ締結部材35を示すのが図9である。クラッチ締結部材35は、ほぼ環状の部材であり、中央に固定軸15に嵌合する貫通孔35cが設けられている。クラッチ締結部材35の外周にはギア部35bが設けられ、電動モータ19の回転軸14と噛合し、電動モータ19の回転トルクを受ける。
【0054】
クラッチ締結部材35のピストン36のカム面に対向する軸方向端面は、カム面となっており、カム溝35aが設けられている。カム溝35aは、図9の(b)から分かるように、周方向でほぼ等分に4箇所に設けられている。しかしながら、カム溝35aの数や形状は任意であり、ピストン36のカム溝36aに対応するものであれば、図示のものに限定されるものではないことは言うまでもない。ピストン36のカム溝36aと同様に、カム溝35aは、カムローラ34の転動する、傾斜部と、傾斜部と一体に連続する平坦部とからなっている。
【0055】
以上説明した、各実施例及びその変形例では、Vプーリを駆動する駆動力発生手段は電動モータであるが、必要な駆動力が得られればよいので、必ずしも電動モータでなくともよい。例えば、油圧により制御することも可能である。しかしながら、軽量化やコンパクト化などのためには電動モータの使用が好ましい。
【0056】
【発明の効果】
以上説明した本発明によれば、次のような効果が得られる。
可動シーブからの回転トルクをクラッチ機構及びワンウェイクラッチで受けるため、クラッチ締結部のネジ部の効率を高めることができる。
従って、ベルト式無段変速機構のVプーリの制御効率を高めることができ、駆動モータの小型化、軽量化、消費電力の削減が可能となる。
【0057】
また、請求項3に示す実施例のように、クラッチ締結部がボールネジ機構を有するように構成すると、回転トルクをスラスト力に変換する変換効率が向上する。
請求項4に示す実施例のように、クラッチ締結部がカム機構を有するように構成すると、クラッチ締結のための押圧機構が簡単になる。
【図面の簡単な説明】
【図1】本発明の第1実施例にかかるベルト式無段変速機のVプーリ制御機構を示す軸方向断面図である。
【図2】本発明の第2実施例にかかるベルト式無段変速機のVプーリ制御機構を示す軸方向断面図である。
【図3】本発明の第3実施例にかかるベルト式無段変速機のVプーリ制御機構を示す軸方向断面図である。
【図4】本発明のVプーリ制御機構に適用可能なクラッチ機構の変形例を示す軸方向断面図である。
【図5】本発明のVプーリ制御機構に適用可能なクラッチ機構の他の変形例を示す軸方向断面図である。
【図6】第3実施例のカム機構に用いられる、ピストンを示す図であり、(a)はカム面を示す正面図、(b)は軸方向断面図、(c)は背面図、(d)はボールカムの係合方向及び離脱方向を示す断面図である。
【図7】第3実施例のカム機構に用いられる、クラッチ締結部材を示す図であり、(a)は軸方向断面図、(b)はカム面を示す正面図である。
【図8】第3実施例のカム機構に用いることができるピストンを示す図であり、(a)はカム面を示す正面図、(b)は軸方向断面図、(c)は背面図、(d)は、カム面の断面図、(e)はローラカムの係合方向及び離脱方向を示す断面図である。
【図9】図8のピストンと共に用いられる、クラッチ締結部材を示す図であり、(a)は軸方向断面図、(b)はカム面を示す正面図、(c)はカム面の断面図である。
【図10】従来のVベルト式無段変速機のVベルト制御機構の軸方向断面図である。
【図11】他の従来例のVベルト式無段変速機のVベルト制御機構の軸方向断面図である。
【符号の説明】
1……Vプーリ
2……固定シーブ
3……可動シーブ
4……Vベルト
5……ボールネジ機構
10、30、50……Vプーリ制御機構
13、23、25、35……クラッチ締結部材
27……ワンウェイクラッチ部
19……電動モータ
Claims (6)
- 固定シーブと可動シーブとを有する、ベルト式無段変速機のVプーリをモータにより制御するVプーリ制御機構において、前記Vプーリ制御機構は、前記モータと前記Vプーリ間に配置され、前記モータにより駆動されるクラッチ締結部と、該クラッチ締結部により締結自在のクラッチ機構と、該クラッチ機構と同軸上に配置され、該クラッチ機構の一方向の回転を防止するワンウェイクラッチ部とを備えていることを特徴とするベルト式無段変速機のVプーリ制御機構。
- 請求項1のVプーリ制御機構において、前記クラッチ締結部はネジ機構を有することを特徴とするベルト式無段変速機のVプーリ制御機構。
- 請求項1のVプーリ制御機構において、前記クラッチ締結部はボールネジ機構を有することを特徴とするベルト式無段変速機のVプーリ制御機構。
- 請求項1のVプーリ制御機構において、前記クラッチ締結部は、カム機構を有することを特徴とするベルト式無段変速機のVプーリ制御機構。
- 請求項1のVプーリ制御機構において、前記Vプーリの前記可動シーブは、第2のボールネジ機構により軸方向に押圧自在であることを特徴とするベルト式無段変速機のVプーリ制御機構。
- 請求項1のVプーリ制御機構において、前記ワンウェイクラッチ部は、前記モータが停止しているとき、前記可動シーブの回転力により前記モータが逆転するのを防止することを特徴とするベルト式無段変速機のVプーリ制御機構。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP09210299A JP4260278B2 (ja) | 1999-03-31 | 1999-03-31 | ベルト式無段変速機のvプーリ制御機構 |
| US09/522,180 US6468170B1 (en) | 1999-03-31 | 2000-03-09 | V-pulley control mechanism for variable-speed drive of belt type |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP09210299A JP4260278B2 (ja) | 1999-03-31 | 1999-03-31 | ベルト式無段変速機のvプーリ制御機構 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2000283253A JP2000283253A (ja) | 2000-10-13 |
| JP2000283253A5 JP2000283253A5 (ja) | 2006-03-23 |
| JP4260278B2 true JP4260278B2 (ja) | 2009-04-30 |
Family
ID=14045094
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP09210299A Expired - Lifetime JP4260278B2 (ja) | 1999-03-31 | 1999-03-31 | ベルト式無段変速機のvプーリ制御機構 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US6468170B1 (ja) |
| JP (1) | JP4260278B2 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4413310B2 (ja) * | 1999-04-09 | 2010-02-10 | Nskワーナー株式会社 | ベルト式無段変速機のvプーリ制御機構 |
| KR100428291B1 (ko) * | 2000-12-19 | 2004-04-30 | 현대자동차주식회사 | 무단 변속기용 풀리 |
| JP4082869B2 (ja) * | 2001-02-09 | 2008-04-30 | 株式会社ジェイテクト | 無段変速機 |
| DE10294154B4 (de) | 2001-09-06 | 2006-03-30 | Daihatsu Motor Co., Ltd., Ikeda | Stufenlos einstellbares Getriebe |
| JP3982236B2 (ja) * | 2001-11-02 | 2007-09-26 | 日本精工株式会社 | 無段変速機用プーリ幅調節装置 |
| JP2003148585A (ja) * | 2001-11-12 | 2003-05-21 | Nsk Ltd | 可動部材操作用アクチュエータ装置 |
| KR100476945B1 (ko) * | 2002-10-11 | 2005-03-18 | 이종완 | 무단변속장치의 속도비 제어장치 |
| ITMI20022391A1 (it) * | 2002-11-12 | 2004-05-13 | Piaggio & C Spa | Cambio di velocita' a variazione continua |
| US20050272540A1 (en) * | 2004-05-03 | 2005-12-08 | Starkey John M | Coaxial electrical actuator for continuously variable transmission |
| JPWO2006003904A1 (ja) * | 2004-07-02 | 2008-04-17 | ヤマハ発動機株式会社 | 小型車両用のvベルト式無段変速機、及び鞍乗型車両 |
| JP4573589B2 (ja) | 2004-07-09 | 2010-11-04 | 本田技研工業株式会社 | Vベルト式無段変速機 |
| CN100356045C (zh) * | 2004-07-12 | 2007-12-19 | 雅马哈发动机株式会社 | 动力单元及安装有该动力单元的车辆 |
| JP2007071255A (ja) * | 2005-09-05 | 2007-03-22 | Yamaha Motor Co Ltd | Vベルト式無段変速機及び鞍乗型車両 |
| DE102005051220A1 (de) * | 2005-10-26 | 2007-05-03 | Zf Lenksysteme Gmbh | Servolenkung |
| JP4890905B2 (ja) * | 2006-03-29 | 2012-03-07 | Ntn株式会社 | 無段変速機用アクチュエータ |
| US7980973B1 (en) * | 2006-05-01 | 2011-07-19 | Purdue Research Foundation | Coaxial electrical actuator for continuously variable transmissions |
| WO2009031669A1 (ja) * | 2007-09-05 | 2009-03-12 | Nsk Ltd. | 無段変速機、アクチュエータ及び中間端子 |
| US8152176B2 (en) * | 2009-06-25 | 2012-04-10 | Sbyke Usa Llc | Truck assembly |
| FR2977287B1 (fr) * | 2011-06-29 | 2013-07-05 | Valeo Embrayages | Actionneur d'embrayage |
| US9599009B2 (en) | 2014-07-22 | 2017-03-21 | Deere & Company | Reversible mechanical fan |
| US10648554B2 (en) | 2014-09-02 | 2020-05-12 | Polaris Industries Inc. | Continuously variable transmission |
| TWI570339B (zh) * | 2015-08-13 | 2017-02-11 | 三陽工業股份有限公司 | 多模式無段變速機構 |
| CA3183788A1 (en) | 2018-03-19 | 2019-09-26 | Polaris Industries Inc. | Continuously variable transmission |
| CA3184386A1 (en) * | 2018-03-19 | 2019-09-26 | Polaris Industries Inc. | Electronic cvt with friction clutch |
| KR102654380B1 (ko) * | 2021-11-29 | 2024-04-04 | 주식회사 네오오토 | 변속용 클러치 팩 시스템 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB285407A (en) * | 1927-02-15 | 1929-05-02 | Zeppelin Luftschiffbau | Improvements in lattice work for aircraft and light metal construction |
| JP2656501B2 (ja) * | 1987-08-28 | 1997-09-24 | アイシン・エィ・ダブリュ株式会社 | ベルト式無段変速装置 |
| JPH01295067A (ja) * | 1988-05-19 | 1989-11-28 | Mazda Motor Corp | 無段変速機の油圧制御装置 |
| JPH02173447A (ja) * | 1988-12-27 | 1990-07-04 | Aisin Aw Co Ltd | 無段変速機 |
| JPH02180336A (ja) * | 1988-12-30 | 1990-07-13 | Aisin Aw Co Ltd | ベルト式無段変速装置 |
| JP2558534B2 (ja) * | 1990-03-12 | 1996-11-27 | 愛知機械工業株式会社 | 無段変速機 |
| JP2626257B2 (ja) * | 1990-12-28 | 1997-07-02 | トヨタ自動車株式会社 | 車両用ベルト式無段変速機の油圧制御装置 |
| JPH04254223A (ja) * | 1991-02-04 | 1992-09-09 | Toyota Motor Corp | 希薄燃焼内燃機関を備えた車両用ベルト式無段変速機の制御装置 |
| JPH05106728A (ja) * | 1991-10-11 | 1993-04-27 | Fuji Heavy Ind Ltd | 無段変速機の制御装置 |
| JP3149557B2 (ja) * | 1992-08-07 | 2001-03-26 | アイシン・エィ・ダブリュ株式会社 | ベルト式無段変速機 |
| JP3572623B2 (ja) * | 1992-08-31 | 2004-10-06 | 本田技研工業株式会社 | 車両用クラッチの制御装置 |
| US5503602A (en) * | 1994-07-12 | 1996-04-02 | Dana Corporation | Clutch actuating device having pilot clutches for use in a vehicle interaxle differential |
| US5810141A (en) * | 1996-12-13 | 1998-09-22 | Eaton Corporation | Driveline clutch with unidirectional apply ball ramp |
| US5984068A (en) * | 1997-12-01 | 1999-11-16 | Chrysler Corporation | Electro-mechanical clutch actuator |
| US5992592A (en) * | 1998-03-24 | 1999-11-30 | Borg-Warner Automotive, Inc. | Bi-directional overrunning clutch assembly for transfer cases and the like |
| US6167997B1 (en) * | 1999-02-23 | 2001-01-02 | Zf Meritor | Electronically controlled clutch actuation system |
-
1999
- 1999-03-31 JP JP09210299A patent/JP4260278B2/ja not_active Expired - Lifetime
-
2000
- 2000-03-09 US US09/522,180 patent/US6468170B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| US6468170B1 (en) | 2002-10-22 |
| JP2000283253A (ja) | 2000-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4260278B2 (ja) | ベルト式無段変速機のvプーリ制御機構 | |
| WO1989002044A1 (fr) | Transmission variable du type a courroie | |
| JP3660047B2 (ja) | 金属vベルト式無段変速機 | |
| US6484858B1 (en) | Friction clutch and automatic transmission of automobile using the same and non-stage transmission of automobile and power distribution device of automobile and power transmission device of motorcycle | |
| CA2650275A1 (en) | Reversible driven pulley for a continuously variable transmission | |
| US6520884B2 (en) | Torque-split type continuously variable transmission | |
| JP3772736B2 (ja) | プラネタリギヤ装置 | |
| JPH10306863A (ja) | トルク感応型回転制御装置 | |
| JP4413310B2 (ja) | ベルト式無段変速機のvプーリ制御機構 | |
| JPH07190159A (ja) | 摩擦車式無段変速機 | |
| JP3760697B2 (ja) | トロイダル型無段変速機及び変速比無限大無段変速機 | |
| WO2023188281A1 (ja) | 2段変速装置 | |
| KR101015101B1 (ko) | 무단변속기 | |
| JP3901304B2 (ja) | ベルト式無段変速機付き伝動装置 | |
| JP3383408B2 (ja) | 車両用無段変速装置 | |
| JPH037822B2 (ja) | ||
| KR100460903B1 (ko) | 차량용 무단 변속기 | |
| JP2005331079A (ja) | ベルト式無段変速機およびその制御装置 | |
| JPH1122798A (ja) | ベルト式無段変速機 | |
| JP3933430B2 (ja) | 無段変速機 | |
| JP4198304B2 (ja) | 自動変速機のクリープ走行制御装置 | |
| JP2001074113A (ja) | 無段変速装置 | |
| KR970003561B1 (ko) | 클러치 및 무단변속기 겸용장치 | |
| JPH037820B2 (ja) | ||
| JPH037819B2 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060202 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060202 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080807 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080811 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081010 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090105 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090204 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120220 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120220 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130220 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140220 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |