JP3762539B2 - X線透視撮影装置および方法 - Google Patents
X線透視撮影装置および方法 Download PDFInfo
- Publication number
- JP3762539B2 JP3762539B2 JP09178698A JP9178698A JP3762539B2 JP 3762539 B2 JP3762539 B2 JP 3762539B2 JP 09178698 A JP09178698 A JP 09178698A JP 9178698 A JP9178698 A JP 9178698A JP 3762539 B2 JP3762539 B2 JP 3762539B2
- Authority
- JP
- Japan
- Prior art keywords
- top plate
- arm
- switch
- ray
- movement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 title description 8
- 230000033001 locomotion Effects 0.000 claims description 79
- 238000005096 rolling process Methods 0.000 claims description 24
- 238000003384 imaging method Methods 0.000 claims description 21
- 230000007246 mechanism Effects 0.000 claims description 19
- 238000010586 diagram Methods 0.000 claims description 17
- 238000002594 fluoroscopy Methods 0.000 description 22
- 230000006835 compression Effects 0.000 description 12
- 238000007906 compression Methods 0.000 description 12
- 210000003811 finger Anatomy 0.000 description 7
- 238000003825 pressing Methods 0.000 description 7
- 238000013459 approach Methods 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 241000406668 Loxodonta cyclotis Species 0.000 description 3
- 239000003086 colorant Substances 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 238000010409 ironing Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 210000003813 thumb Anatomy 0.000 description 2
- 229920000049 Carbon (fiber) Polymers 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 239000004917 carbon fiber Substances 0.000 description 1
- 230000010485 coping Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000002601 radiography Methods 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
Images






















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/548—Remote control of the apparatus or devices
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Engineering & Computer Science (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- High Energy & Nuclear Physics (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Description
【発明の属する技術分野】
本発明は、X線透視装置および透視方法に関し、特に頭足全身撮影可能な天板と映像系運動の組み合わせからなるX線透視装置および透視方法に関する。
【0002】
【従来の技術】
特開平9−117422 号公報には、被検体を乗せる天板と、前記被検体に向けてX線を曝射するX線管と、前記被検体を透過したX線像を撮影するX線像撮影部と、前記X線管と前記X線像撮影手段を対向させて支持する支持部と、前記支持手段を移動することにより、前記X線管と前記X線像撮影手段を移動する支持部移動手段と、前記支持部移動手段の移動量に基づいて、撮影部移動量を求める演算手段と、前記撮影部移動量に基づいて、前記X線像撮影部を前記支持部に対して平行移動する撮影部移動手段を備え、前記支持部はC型形状のアームを備え、前記支持部移動手段は前記アームをスライドして回転するスライド手段と前記スライド手段を回転する回転手段を備え、前記演算手段は前記移動手段のスライド回転量と前記回転手段の回転量に基づいて前記撮影部移動量を求めるものであるX線診断装置が記載されている。
【0003】
本発明者等は、先に床面に立設されるベース部と、鉛直面内で回動し床面に対する角度を変更自在に前記ベース部に支持された支持フレームと、両端部にX線管装置とX線受像装置を対向支持し、前記支持フレームに沿って移動自在に支持された支持アームと、被検体を載置する天板とよりなるX線透視撮影装置において、前記天板を被検体の体軸方向に移動自在に支持する天板支持枠と、この天板支持枠を被検体の体軸回りに回転可能に支持する架台とを備え、前記天板を前記天板支持枠と前記架台を介して前記支持フレームの一方に支持したことを特徴とするX線透視撮影装置を提案した(特願平9−17641号、ただし出願の時点で未公開)。
【0004】
これによって、被検体を載せる天板の体軸方向の摺動(天板スライド)と、体軸回りの(天板ローリング)が可能となった。
【0005】
【発明が解決しようとする課題】
天板を起倒動,左右動,長手動,上下動およびローリングなどの運動を可能とし、該天板をはさんで配設されたX線管装置およびX線受像装置を前後動可能とし、X線管装置およびX線受像装置をその両端部に設けたCアームを回転,スライド,長手動などの運動を可能としてX線透視撮影装置が構成される場合がある。
【0006】
このように被検体を載せる天板,X線装置,Cアームが各種の運動をする場合に、装置を構成する部材間が干渉することがないようそれらの接近状況をしっかりと把握しなければならない。そのためには、天板,X線装置,Cアームの安全な運動の方向を操作者が確実に把握できるものでなければならない。
【0007】
本発明はかかる点に鑑みて天板あるいはCアームに、更にはX線装置に各種運動をさせるときに、これら部材の運動を安全・確実に把握でき、しかも視覚的に容易に把握することのできるX線透視撮影装置を提供することを目的とする。
【0008】
【課題を解決するための手段】
前記目的を達成するために、本発明に係るX線透視撮影装置は、被検体を載せる天板と、該天板を起倒動,左右動,長手動,上下動およびローリング運動を可能に支持する天板機構部と、前記天板を挟んで配設されるX線管装置とX線受像装置を含むX線装置と、その両端部に前記X線管装置と前記X線受像装置を対向支持するCアームと、該Cアームを回転,スライド,上下動作、長手動の運動を可能に支持するCアーム機構部と、前記天板機構部と前記Cアーム機構部に設けられる位置検出器からの位置情報を介して前記天板と前記 C アームの移動量を計算して前記天板と前記 C アームが衝突、干渉しないように動作制御する動作制御装置と、前記天板と前記 C アームの動作を指示する操作卓を備えたX線透視撮影装置において、前記操作卓は、前記天板と前記 C アームの動作状態を表示する表示装置と、該表示装置の表示画面処理を行う表示画面制御装置とを備え、前記表示画面制御装置は、前記動作制御装置からの前記位置情報と動作制御信号に基づいて、前記天板と前記Cアームと前記X線装置の位置状態図とともに、前記天板と前記Cアームが衝突、干渉することなく動作可能な運動方向を示す矢印を前記表示装置に表示するようにする。
【0017】
尚、Cアームは典型的にはC形状をなすが、コ状あるいはC形状とコ状の組合せであっても機能的には同じ作用をなすので、ここではこれらを含めてCアームと表現する。
【0018】
【発明の実施の形態】
以下、本発明にかかる一実施例を図面に基づいて説明する。
【0019】
図1は、X線透視撮影装置の全体概略を示す。装置は、その構成部材として、被検体を載せる天板1A,天板回転支持部2A,天板上下支持部3A,C形状をしたCアーム4A,Cアーム保持部5A,Cアーム保持部5Aがスライドするスライド板6A,X線管装置7A,X線管装置7Aと対抗配置するX線受像装置8A,支柱9A,支柱9Aによって保持されるケーブル10Aおよび床面に固設されたベース部11Aから構成される。X線透視撮影装置本体に近接して近接操作卓73が配置され、壁90を隔てて遠隔操作卓75が配置される。
【0020】
図で番号で示すように、
天板1Aは、
(1) 起倒動
(2) テーブル上下動に伴う上下動
(3) 左右動
(4) 長手動
(5) ローリング
(6) 上下動
からなる運動を行うように構成される。
【0021】
Cアーム4Aは、
(7) 回転
(8) スライド
(9) 長手動
からなる運動を行うよう構成される。
【0022】
X線管装置7AとX線受像装置8Aとから構成されるX線装置は前後動の運動を行うよう構成される。
【0023】
支柱9Aは、天板1Aに対し、逆T字状に配設され、いずれの装置の部材よりも高所からケーブル10Aが引出されている。
【0024】
図2から図9は各部の詳細を示す。
【0025】
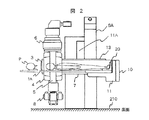
図2,図3および図4は本発明の実施の形態であるX線透視撮影装置の構成を示すもので、図2は正面図、図3は図2の側面図、図4は図2を上方から見た平面図である。
【0026】
床面210に固設されたベース部11Aには、支持フレーム3に固定されたシャフト2がその軸芯回りに回動自在に支持されており、さらにシャフト2は図示しない例えばウォームホィールとウォームギアやモータから成る公知の回転駆動機構によって、回動できるよう構成されている。
【0027】
支持フレーム3には、アームホルダー4が支持フレーム3の長手方向に直線移動可能なように設けられており、この支持は、支持フレーム3にはリニアガイドベアリングのレール13とラック7を固設し、アームホルダー4内部に前記レール13に係合される2個のブロック14a,14bと、ラック7の両側面を挟持する複数のガイドローラ16a,16bを固設することによって行われている。
【0028】
さらに、アームホルダー4内部にはモータ18とピニオン17が設けられており、ピニオン17の歯面はラック7の歯面に噛合しているため、モータ17を回転駆動させることにより、アームホルダー4は、支持フレーム3に沿って電動移動する。
【0029】
Cアーム4Aを構成するC字形状を成した支持アーム5の両端部には、X線管装置7AとX線受像装置すなわちX線イメージインテンシファイヤ(I.I.)8Aが対向保持されており、X線管装置7Aから被検体Pに向けてX線を照射し、被検体Pを透過したX線をI.I.6によって光学像に変換して、被検体PのX線透視撮影を行えるように構成されている。
【0030】
支持アーム5の形状が円弧状になっているのは、被検体Pを多方向から透視撮影できるようにするためで、支持アーム5はアームホルダー4によって、図3のF矢印方向にスライド自在に支持されている。この支持は、アームホルダー4に複数のガイドローラ19a,19b,19c,19dを固定し、それによって支持アーム5の外周面の両端部に設けられた突出形状部を挟持することで行われており、さらに支持アーム5は、図示しない公知の駆動機構、例えば支持アーム5の外周面にチェーンを巻付け、それをアームホルダー4に固設した鎖車に掛け回し、鎖車をモータで回転させるなどの機構によって、電動スライド動作が可能なようになっている。
【0031】
支持フレーム3の一端には架台ホルダー9が固定されており、その架台ホルダー9の先端には架台10が固定されている。架台10には、天板支持枠11が図2に示すように点Rを中心として回転可能に支持されており、さらに天板支持枠11には、被検体Pを載せるための天板1Aが、被検体Pの体軸方向に摺動自在となるように支持されている。また、天板1Aの端部には被検体Pを天板1A上にて支えるために踏台20が取付けられている。
【0032】
次に、本発明の特徴部分である天板の支持、および駆動機構について、図5から図8を用いて説明する。なお、図4から図7は便宜上、天板1Aから踏台20を取外した状態を示したものである。ここで、図5は、図4の天板後端部を拡大して示した平面図、図6は図5のA−A矢視断面図、図7は図5のB−B矢視断面図、図8は図5の右側面図で架台10からカバーを取外した状態を示している。
【0033】
被検体を載せる天板1Aは、その中央部分はX線透過性の良い、例えばカーボンファイバー成形品などで製作されており、その両側のX線透過性を必要としない部分の下面には、取付金具23aと取付板23bがそれぞれ固定されている。
【0034】
取付板23bには、リニアガイドベアリングのブロック22が固設されており、また、取付金具23aにはブロック22の他に、駆動ねじ24に噛合したナット25が固設されている。
【0035】
一方、天板支持枠11の両側の上面には、リニアガイドベアリングのレール
21が2本平行して固設されており、これらは前記ブロック22と係合している。また、天板支持枠11には、駆動ねじ24を支持する軸受が固定されていて、駆動ねじ24の一端はカップリング27によって、ブラケット29によって天板支持枠11に固定されたモータ28の軸に接続されている。すなわち、天板1Aはこれらの支持および駆動機構によって、被検体の体軸方向に摺動自在に天板支持枠11上に設けられている。
【0036】
天板支持部11の後端部には、軸形状部11aが形成されており、その先端はクロスローラ軸受30の内輪に嵌合されると共に、軸形状部11aに固定されたおさえピース32によって抜け止め処置が行われている。
【0037】
クロスローラ軸受30の外輪部は、架台10に設けられた凹部におさえ板31によって固定されており、この方式によって天板支持枠11は、架台10によりクロスローラ軸受30の中心を回転軸として、回転自在に支持されている。
【0038】
なお、クロスローラ軸受30の中心点は、図3の点Rに相当するもので、天板の上方近傍位置にあり天板1A表面からこの点Rまでの距離(図7中のG寸法)は概ね10cmにとられている。この理由は、天板1A上に載せた被検体の検査対象部位が、天板1Aを点R回りに回動させても、X線照射中心から大きく外れないようにするためである。
【0039】
前記おさえピース32にはリンク33が固定されているため、天板支持枠11の回転に伴ってリンク33も回転する。また、リンク33の自由端近傍には長穴が設けられており、その長穴に沿ってリンク33の長手方向に摺動可能なように、角形状を成した角ブロック34が設けられている。この角ブロック34の中心には丸穴が形成されており、この穴にスライドプレート41の上面に設けられた軸部35が挿入されている。
【0040】
一方、スライドプレート41の下面には、リニアガイドベアリングの2ケのブロック40と、駆動ねじ42に噛合されたナット43が固設されており、ブロック41は架台10上に2本平行に固設されたレール39に係合されている。
【0041】
駆動ねじ42の一端は、架台10上に固設された軸受46によって回動自在に支持され、軸端にはプーリ44aが取付けられている。このプーリ44aと、ブラケット36を介して架台10上に固設されたモータ37の軸に取付けられたプーリ44bとの間には、ベルト45が掛け回されており、モータ37の回転が駆動ねじ42に伝達される。
【0042】
次に、本実施例によるX線透視撮影装置の天板1Aの回転および摺動の動作を、図7ないし図9を用いて説明する。なお、図9は天板1Aの回転を移動限界近傍に位置させた状態を示すものである。
【0043】
図7は、天板1Aの被検体の体軸方向の摺動が、足側限界位近傍にある状態を示しており、この位置においてモータ28を天板摺動が頭方向へ移動する向きに回転させると、モータ28の回転はカップリング27を介して駆動ねじ24に伝わり、ねじ回転量に見合う量だけナット25が天板頭側へ移動するため、ナット25を固定した天板1Aが天板支持枠11上を摺動する。
【0044】
図8に示す天板1Aの体軸回りの回転がセンター位置にある状態において、図に向って時計回り方向に天板1Aが回動するように、モータ37を回転させると、モータ37の回転はベルト45を介して駆動ねじ42に仕わり、ねじ回転量に見合うだけ、ナット43を固設したスライドプレート41はリニアガイドベアリングのレール39に沿って直線移動する。同時に、角ブロック34も軸部35の回りに回転しながら、スライドプレート41と共に移動するが、角ブロック34の一方の側面がリンク33の長穴内面に接触しているため、リンク33は角ブロック34によって傾斜させられる。この傾斜角θの分だけ、天板1Aを支持する朴板支持枠11は点Rを中心として、被検体の体軸回りに回転し、図9に示す状態に至る。
【0045】
これにより、ひとつのX線透視撮影装置において、被検体を載せる天板1Aの、体軸方向の摺動(天板スライド)と、体軸回りの回転(天板ローリング)が可能となる。
【0046】
なお、本実施例においては、天板1Aの体軸回りの回動をリンクの傾斜によって行う方法を示したが、天板支持枠11の回転軸の周囲にベルトやチェーンを掛け回し、それをモータに取付けたプーリや鎖車によって巻き回してもよく、また、歯車の連結によって天板支持枠11の回転軸を回動させてもよい。
【0047】
さらに、本実施例においては、天板を天板支持枠,架台および架台ホルダーを介して、支持フレームに片持ち支持する方法を示したが、支持フレームのもう一端に天板頭側下面を支えるための別アームを設け、天板を両持ち支持としてもよい。
【0048】
図10はブロックを示す。遠隔操作卓75,パワアシスト操作部82は、機構部71,姿勢制御回路72,近接操作卓73およびスピーカ74からなり、機構部71は、各種機構76,モータ77,エンコーダあるいはポテンションメータなどの位置検出器78を有する。位置情報が機構部71からおよび操作信号が遠隔操作卓75から姿勢制御回路72に伝えられて、ここを介して近接操作卓73に入力される。遠隔操作卓75内に設けたCPUは天板1A,Cアーム4A,X線管装置7A,7Bが運動したときにその移動量を計算し、各部材が干渉,衝突しないように指示を出す。近接操作卓73は、CPU(演算装置)88,操作スイッチ79,表示画面部80,タッチパネル81からなる。操作スイッチ79およびパワアシスト操作部82からの操作信号は姿勢制御回路72に入力される。姿勢制御回路72からの駆動信号が機構部71のモータ77に伝えられる。CPU88はボタン(タッチパネル)81からの制御信号および位置情報に基づいて表示画面処理を行うと共にスピーカ74に同一の結果を音声して発声して操作者に操作状況を知らせる。表示画面部80には、後述するように、操作状況を示す画面と天板1AとCアーム4Aの運動に伴って装置を構成する部材間の接近状態もしくは天板1AとCアーム4Aの運動がそのまま進行したと想定した時の装置を構成する部材間の衝突・干渉状態の画面とが表示される。
【0049】
なお、ケーブル10Aは、ベース部11Aに構成された支柱9Aの上面と、Cアーム保持部5Aの上面とで連結されており、支柱9Aはベース部11Aに内蔵されている天板回転支持部を中心としてCアーム保持部5Aと反対側に構成されているので、Cアーム保持部5Aのスライド移動や起倒により、ケーブル10Aを挟み込むことがない。
【0050】
図11は近接操作卓73の平面を、そして図12はその側面を示す。これらの図において、まず部品名を記すと次のようになる。近接操作卓73の盤面には、Cアーム長手/天板長手動・左右動操作ジョイスティック101,天板長手動・左右動操作モード選択スイッチ102,X線撮影スイッチ103,高速動作モート選択スイッチ104,起倒動操作レバー105,逆傾斜操作選択スイッチ106,X線受像装置前後動/圧迫装置操作レバー107,圧迫装置操作選択スイッチ108,しごき圧迫モード選択スイッチ109,Cアームスライド/回転操作ジョイスティック110,可動絞り照射野設定スイッチ111,可動絞りフィルター操作スイッチ112,天板上下動操作スイッチ113,テーブル上下動スイッチ114,X線受像装置視野選択スイッチ115,透視タイマーリセットスイッチ116,Cアーム側面撮影位置設定スイッチ117,患者乗せ換え位置設定スイッチ118,オーバーテーブルチューブ位置設定スイッチ119,アンダーテーブルチューブ位置設定スイッチ120,ホームポジション設定スイッチ121,Cアーム基準位置設定スイッチ122,オートポジショニング位置記憶スイッチ123,オートポジショニング位置設定スイッチ124,X線透視スイッチ125,透視線量モード選択スイッチ126,天板ローリングモード選択スイッチ,天板ローリング操作スイッチ128,緊急停止スイッチ129,近接操作モード選択スイッチ130,オールマニュアルモード選択スイッチ131,絞りタッチ検出状態解除スイッチ132,タッチパネル式EL画面表示部133(図10では80で示す。)、X線管選択,X線照射,スタンバイ状態表示灯134,遠隔操作モード選択スイッチ135,タイミング撮影スイッチ136,分割撮影選択スイッチ137およびスタンバイ状態表示灯138を備える。
【0051】
(101) Cアーム長手動/天板長手動・左右動操作ジョイスティック(一軸操作器)
自復型の一軸操作器である。そのままレバーを操作した場合はCアーム長手動および天板左右動が動作する。
【0052】
レバーを手前側に操作するとCアーム長手動が頭側に移動する。
【0053】
Cアーム長手動は操作レバーの倒れる角度によって速度が連続的に変化する。
【0054】
ジョイスティックを左側に操作すると、天板左右動が操作者側(天板を足側より見て左側)へ移動する。
【0055】
天板長手動・左右動操作モード選択スイッチ102を押しながらジョイスティックを操作した場合は、天板長手動および天板左右動が動作する。
【0056】
天板長手動・左右動操作モード選択スイッチ102を押しながら、ジョイスティックを手前側に操作すると天板長手動が足側に移動する。左側に操作すると、天板左右動が操作者側(天板を足側より見て左側)へ移動する。
【0057】
(102) 天板長手動・左右動操作モード選択スイッチ
このスイッチを押しながらCアーム長手動/天板長手動・左右動操作ジョイスティック101を操作すると、天板長手動を操作することが可能になる。
【0058】
(103) X線撮影スイッチ
DR撮影時に使用する。X線管の回転を開始させ回転が一定値に達したら自動的にX線を照射し撮影を行う1段モーションのスイッチである。起動に要する時間は組み合わせるX線管によって異なる。
【0059】
撮影中は全てのCアームテーブル装置の動作が停止する。
【0060】
(104) 高速動作モード選択スイッチ
このスイッチを押しながらCアーム長手動操作レバー101を操作すると、動作が通常より高速になる。
【0061】
(105) 起倒動操作ジョイスティック
レバーを右(起動側)へ操作すると、操作している間だけ天板は、逆傾斜位から水平位,立位方向へ起き続け、+90゜でテーブル上下動が自動的に最低位まで下がって停止する。この場合、水平位で天板は自動停止しない。
【0062】
レバーを左(倒動側)へ操作すると、操作している間だけ天板は、立位から水平方向へ倒れ、水平位でテーブル上下動が自動的に最低位まで下がって停止する。
【0063】
水平位で停止した後、天板逆傾斜切替スイッチ106を押しながら、ジョイスティックを左(倒動側)へ操作すると天板は、水平位から逆傾斜位まで倒動する。
【0064】
天板が水平位になる前に天板逆傾斜切替スイッチ106を押しながら、ジョイスティックを左(倒動側)へ操作すると天板は、水平位で自動停止せずに逆傾斜位まで倒動する。
【0065】
ジョイスティックを倒す角度により低速と高速の2段階変速が可能である。但し動作開始時や停止直前時等には被検者へのショック防止のため自動的に低速となる。
【0066】
起倒中に天板支持アームが床に干渉する場合はテーブル上下動が自動的に行われ干渉を回避する。天板上下動の位置が低い場合は動作を停止して干渉を回避するのに必要な次操作を近接操作卓の画面表示部の画面上にガイド表示する。
【0067】
起倒中にCアームの一部や天板の先端等が、天井または床と干渉する位置に接近した場合は、起倒動作を停止し干渉を回避するのに必要な次操作を近接操作卓の画面表示部の画面上にガイド表示する。
【0068】
(106) 逆傾斜操作選択スイッチ
このスイッチを起倒動操作レバー105と同時に操作することで、起倒動の逆傾側への操作が可能となる。
【0069】
(107) I.I.前後動/圧迫装置操作レバー
このレバーは通常I.I.前後動の操作器であるが、圧迫装置が装着されており、圧迫装置操作選択スイッチ108のランプが点灯している場合は圧迫装置操作レバーとなる。
【0070】
I.I.前後動の操作について:
この操作レバーを奥側へ操作させるとI.I.前後動が被検者方向へ前進し、離せば停止する。手前側へ操作すると被検者から退避する方向へ後退する。
【0071】
I.I.前後動は操作レバーの倒れる角度によって速度が連続的に変化する。倒す角度が大きいほど速度が速くなる。
【0072】
被検者の周囲には一定の範囲で干渉領域が設定されており、この被検者干渉領域にI.I.が進入した場合、警告音が鳴り操作レバーを倒す角度に関らずI.I.前後動は低速になる。
【0073】
I.I.と天板、またはI.I.後面の映像装置と床や天井が干渉する位置に接近した場合は、警告音が鳴ってI.I.前後動作を停止する。干渉を回避するのに必要な次操作を近接操作卓の画面表示部の画面上にガイド表示する。
【0074】
(108) 圧迫装置操作選択スイッチ
圧迫操作に使用する。
【0075】
(109) しごき圧迫モード選択スイッチ
しごき圧迫操作に使用する。
【0076】
(110) Cアーム回転・スライド操作レバー
Cアームの回転,スライド動作のスイッチである。レバーの頭頂部に設けたボタンを押しながら、レバーを倒すと、アームはその方向に回転する。APモードの場合、Cアームスライド動作の方向がPAモードの場合とは逆になる。
【0077】
レバーを倒す角度によって回転速度は変わり、倒す角度が大きくなるほど速度は速くなる。
【0078】
被検者の周囲には一定の範囲で干渉領域が設定されており、この被検者干渉領域にCアームの一部が進入した場合、警告音が鳴り操作レバーを倒す角度に関らずCアームの回転,スライド動作は低速になる。
【0079】
Cアームの一部が床や天井,装置の他の部分と干渉する位置に接近した場合は、Cアームの回転,スライド動作を停止し干渉を回避するのに必要な次操作を近接操作卓の画面表示部の画面上にガイド表示する。
【0080】
(111) 可動絞り照射野設定スイッチ
この操作器は、上下・左右に倒すことができる。
【0081】
操作器を上に倒すと、上下の羽根が開く。
【0082】
下に倒すと、上下の羽根が閉じる。
【0083】
右に倒すと、左右の羽根が開く。
【0084】
左に倒すと、左右の羽根が閉じる。
【0085】
(112) 可動絞りフィルター操作スイッチ
この4つの操作器は、上下左右と4つあるフィルターにそれぞれ対応しており、これらを上下方向・左右回転方向に操作することができる。
【0086】
上の操作器は上のフィルターの動きに対応している。
【0087】
上の操作器を上に倒すと上フィルターは上に移動し、下に倒すと下に移動する。下のフィルターも同様に操作できる。
【0088】
上の操作器を右に倒すか、または下の操作器を左に倒すと左右のフィルターは一対で右に回転し、逆に動かすと左に回転する。
【0089】
左の操作器は左のフィルターの動きに対応している。
【0090】
左の操作器を左に倒すと左のフィルターは左に移動し、右に倒すと右に移動する。右のフィルターも同様に操作できる。
【0091】
左の操作器を上に倒すか、または右の操作器を下に倒すと上下のフィルターは一対で右に回転し、逆に動かすと左に回転する。
【0092】
(113) 天板上下動操作スイッチ
天井のみを上下動させるスイッチである。
【0093】
↑のスイッチで天板は上に移動し、↓のスイッチで天板は下に移動する。天板がI.I.やコリメータ等と干渉する位置に接近すると動作は停止する。
【0094】
(114) テーブル上下動操作スイッチ
天板とCアームのテーブル全体を上下動させるスイッチである。
【0095】
↑のスイッチで天板とCアームは上に移動し、↓のスイッチで天板とCアームは下に移動する。
【0096】
装置の一部が床や天井と干渉する位置に接近すると動作は停止する。
【0097】
(115) I.I.視野選択スイッチ
I.I.サイズ切換選択スイッチである。
【0098】
マークの大きさに応じ、各々6″,9″,12″,16″(オプション)の4種類に切換できる。
【0099】
(116) 透視タイマーセットスイッチ
遠隔操作器にて設定した透視タイマー設定時間の30秒前もしくは5分を超えて透視が行われた場合ブザーによりこれを知らせる。
【0100】
設定時間が経過すると透視は自動的に遮断する。続けて透視を行いたい場合には透視タイマーリセットスイッチを押せば、ブザーは停止しそのまま透視を行うことができる。
【0101】
このとき、遠隔操作器の透視タイマーの積算時間表示はリセットされずそのまま積算が続けられる。積算時間の表示は、0.1分(6秒)ごとに積算され、最大99.9 分まで表示し、被検者ナンバーを切り換えるかまたは、透視時間設定器を操作すると0に戻る。
【0102】
(117) Cアーム側面撮影位置設定スイッチ
Cアームを側面撮影の位置に自動的に設定するスイッチである。スイッチを押し続けるとCアームスライド動作が行われ、側面撮影位置に来ると速度が遅くなり自動的に停止する。途中で操作を止めると動作は一旦停止する。近接操作卓のみで使用になれる。
【0103】
(118) 患者乗せ換え位置設定スイッチ
被検者が水平状態の天板に座って乗り降りしやすい位置への装置の各動作を自動的に行うスイッチである。
【0104】
アンダーテーブルチューブ(PA)位置の時このスイッチを押しつづけると、I.I.前後動作が退避側に、Cアーム長手動作が頭側に、Cアームスライド動作が下面を開ける位置に、天板左右動が手前側に、天板上下動とテーブル上下動が最下限側に移動し、その他の軸はホームポジションに移動する。
【0105】
天板が床上最低高に達すると動作は自動的に停止するが、途中でスイッチを離すとその位置で移動は止まる。
【0106】
患者乗せ換え位置から全ての軸をホームポジションに戻すには後述するホームポジション設定スイッチ121を操作することによって行う。
【0107】
(119) オーバーテーブルチューブ位置設定スイッチ
透視撮影台をオーバーテーブルチューブ(AP)位置に設定するスイッチである。装置がアンダーテーブルチューブ(PA)位置の時このスイッチを押しつづけると、I.I.前後動作が退避側に、Cアーム長手動作が頭側に、Cアームスライド動作が側面位に、Cアーム回転動作が時計方向に移動し、全ての軸の位置がAP位のホームポジションに達すると自動的に停止するが、途中でスイッチを離すとその位置で移動は止まる。
【0108】
(120) アンダーテーブルチューブ位置設定スイッチ
透視撮影台をアンダーテーブルチューブ(PA)位置に設定するスイッチである。装置がオーバーテーブルチューブ(AP)位置の時このスイッチを押しつづけると、I.I.前後動作が退避側に、Cアーム長手動作が頭側に、Cアームスライド動作が側面位に、Cアーム回転動作が反時計方向に移動し、全ての軸の位置がPA位のホームポジションに達すると自動的に停止するが、途中でスイッチを離すとその位置で移動は止まる。
【0109】
(121) ホームポジション設定スイッチ
透視撮影台をホームポジション位置に設定するスイッチである。
【0110】
(122) Cアーム基準位置設定スイッチ
Cアーム基準位置設定に使用される。
【0111】
(123) オートポジショニング位置記憶スイッチ
自動的に現在位置を記憶させるために使用されるスイッチである。
【0112】
(124) オートポジショニング位置設定スイッチ
自動的に設定位置を指定するために使用されるスイッチである。
【0113】
(125) X線透視スイッチ
透視X線をON/OFFするスイッチである。スイッチを押している間、透視ONとなりスイッチを離すと透視OFFとなる。透視中はスイッチのランプが点灯する。
【0114】
(126) 透視線量モード選択スイッチ
透視画像の輝度を変えずに透視線量を変更するスイッチである。
【0115】
通常透視時はLを選択することにより被曝線量を低減できる。
【0116】
(127) 天板ローリングモード選択スイッチ
このスイッチを押しながら天板ローリング操作スイッチ128を操作すると天板ローリング動作が可能になる。
【0117】
(128) 天板ローリング操作スイッチ
天板のローリング動を操作するスイッチである。
【0118】
左側のスイッチと天板ローリングモード選択スイッチ127を同時に押すと天板が操作者側(被検者右手側)にローリングし、装置の他部分に干渉しない限り30度まで傾き自動停止する。天板が操作者側にローリングしている間は、このスイッチのランプが点灯する。
【0119】
右側のスイッチと天板ローリングモード選択スイッチ127を同時に押すと天板が操作者と反対側にローリングし、装置の他部分に干渉しない限り−30度まで傾き自動停止する。天板が操作者と反対側にローリングしている間は、このスイッチのランプが点灯する。
【0120】
天板がローリングした状態で天板を水平に戻す操作をすると、天板は一旦水平位で自動停止する。引き続き反対側に傾けるには1度スイッチを離してから再び操作する。
【0121】
(129) 緊急停止スイッチ
万一操作器によるCアームテーブル装置の姿勢制御ができなくなった場合、このスイッチを押す。Cアームテーブル装置の動力電源だけが遮断されて装置の動作は停止し、遠隔および近接操作卓の緊急停止表示灯(赤)が点灯する。操作卓の他のランプや画像処理装置の電源は遮断されない。
【0122】
緊急停止スイッチは天板の足側後端側面と、Cアーム基部側面と、近接操作卓および遠隔操作卓の合計4個所ある。いずれのスイッチが押されても装置は停止する。
【0123】
このスイッチはプッシュロックタイプで、押すとその状態で保持され、解除する場合には、スイッチに表示している矢印側へ回すと復帰する。
【0124】
(130) 近接操作モード選択スイッチ
近接操作卓にあることのスイッチを押すとスイッチが点灯し、Cアームテーブルの操作が近接操作卓で可能になる。
【0125】
もう一度押すとスイッチは消灯し、操作は遠隔操作卓側で可能になる。電源投入時は自動的に近接操作となる。
【0126】
(131) オールマニュアルモード選択スイッチ
制御用センサーやコンピューターなどに万一故障が発生し、正常な操作ができなくなった場合、コンピューターシステムによる制御を切り離し、ハードウェアのみによるマニュアル制御モードにするスイッチである。スイッチを押すと警告音が鳴り、スイッチが点灯してオールマニュアルモード状態になる。
【0127】
オールマニュアルモードは万一のバックアップ用として設けたモードである。干渉制御は行いません。装置は一定の低速で動作し、動作スピードの制御やオートポジョニングはできない。
【0128】
(132) 絞りタッチ検出状態解除スイッチ
絞りの前面に設けたタッチセンサーがタッチを検出して装置が自動停止したときに、停止状態を解除するためのスイッチである。この解除スイッチを押しながら直前に操作した反対方向に操作器を操作してタッチ検出状態を解除する。
【0129】
(133) タッチパネル式画像表示部(ELディスプレイ)
画面上にCアームテーブル装置の各動作の現在位置と、操作ガイド表示及び異常発生時の内容と対処方法を表示する。
【0130】
(134) X線管選択,X線照射,スタンバイ状態表示灯
X線管選択 Cアーム装置に組み込まれたX線管装置が使用状態にあるときに緑色のランプが点灯する。この表示灯は近接操作卓のみにある。
【0131】
X線照射 透視および撮影いずれの場合もX線を照射している間黄色のランプが点灯する。
【0132】
スタンバイ状態 姿勢制御系の操作が可能な状態のとき緑色のランプが点灯する。
【0133】
(135) 遠隔操作モード選択スイッチ
遠隔操作卓にあるこのスイッチを押すとスイッチが点灯し、Cアームテーブルの操作が遠隔操作卓で可能になる。
【0134】
もう一度押すとスイッチは消灯し、操作は近接操作卓側で可能になる。電源投入時は自動的に近接操作となる。
【0135】
(136) タイミング撮影スイッチ
撮影で適当な時点でX線を照射するとき使用する。
【0136】
このスイッチを押しながら、撮影スイッチを押すと、X線は照射されない。撮影スイッチを押したまま、タイミング撮影スイッチを離すと、X線は照射され、撮影が終了する。
【0137】
(137) 分割撮影選択スイッチ
DR撮影時の分割サイズ切換選択スイッチである。
【0138】
全面,タテ2分割,ヨコ2分割,4分割の4種類に切換えできる。
【0139】
(138) スタンバイ状態表示灯
姿勢制御系の操作が可能な状態のとき緑色のランプが点灯する。
【0140】
天板1AおよびCアームの操作モードを形成する二つのジョイスティック101,110を操作盤上に左右に配設し、かつ該二つのジョイスティックを中心として操作しながら手と指とを延ばせる円弧および放射状に、条件を行うボタンすなわち各種スイッチ,レバー類を前記操作盤上に配設している。また、円弧および放射状に配設された条件設定を行うボタンの放射延長上に緊急停止スイッチ129を配設している。図11に示す場合、円弧は二つの集合体からなる。図14にその配設の様子を示す。第1の円弧は左右の円弧の連続線141であり、第2の円弧は左右の円弧の連続線142である。操作者140から見た場合、条件設定を行うボタンは、二つのジョイスティック101,110を中心として手143と指140とを延ばせる円弧連続線141,142付近に、かつ放射状に配設される。
【0141】
画面表示部133は、二つのジョイスティック101,110の中心を中心として配設、すなわち、操作者の真上線上に配設される。可動絞りフィルター操作スイッチ112は、開く,閉じる,回す動作を行うX線フィルターとリンクして操作するものであり、その形状はボタン形状とされている。
【0142】
このような構成において、円弧の第1の連続線141付近には、透視線量モード選択スイッチ126,高速動作モード選択スイッチ104,逆傾斜操作選択スイッチ106,圧迫装置操作選択スイッチ108,しごき圧迫モード選択スイッチ109,天板上下動操作スイッチ113,可動絞りフィルター操作スイッチ112,可動絞り照射野設定スイッチ111が配設される。円弧の第2の連続線142付近には、天板ローリング操作スイッチ128,天板ローリングモード選択スイッチ117,ホームポジション設定スイッチ121,アンダーテーブルチューブ位置設定スイッチ120,Cアーム基準位置設定スイッチ122,オートポジョニング位置記憶スイッチ123,患者乗せ換え位置設定スイッチ118,オーバーテーブルチューブ位置設定スイッチ119,Cアーム側面撮影位置設定スイッチ117,透視タイマーリセットスイッチ116,X線受像装置視野選択スイッチ115,テーブル上下動操作スイッチ114,近接操作モード選択スイッチ130が配設される。また、被検者にとって最も安全の要求されるスイッチ類、すなわち、透視線量モード選択スイッチ126,天板ローリングモード選択スイッチ115,テーブル上下動操作スイッチ114,近接操作モード選択スイッチ130が配設される。また、被検者にとって最も安全の要求されるスイッチ類、すなわち、透視線量モード選択スイッチ126,天板ローリングモード選択スイッチ127,天板ローリング操作スイッチ128を右側のジョイスティック101から緊急停止スイッチ129との間に、かつジョイスティック101を保持しながら指を延ばせば届く範囲内において配列し、瞬時に停止させ得るレイアウトとしている。
【0143】
図12において、ジョイスティック101,110は、確実な握りを保持できるグリップ形状としている。すなわち、リラックスした操作を可能にするソフトな握りに適したスカート形状部151と指が滑らなようにくびれ部152を設けている。このくびれ部152に天板長手動・左右動作モード選択スイッチ102を設け、対抗面にX線撮影スイッチ103を設けて使い易いものとしている。このように、近接操作卓全体形状にマッチし、安定感と優しい造形表現を施している。図13は、ジョイスティック101,110の詳細を示す。天板1の先端にカラー色を施し、かつCアームの内面にカラー色を施し、これらのカラー色を異色としている。また、条件を設定するボタンの表面にカラー色を施し、その色をその操作機能から天板1AおよびCアーム4Aに施されたカラー色とリンクさせている。
【0144】
本体の映像動作系と天板動作系の動きを明確に認識させるために二色のポイントカラーを施すものであり、各部材の先端部にポイントカラーを施して、円弧起動等の動きや範囲を示し、安全性を増すようにしている。
【0145】
天板動作系にはピンク色を施して、被検者に対して最も危険な天板のローリング/逆傾斜/天板垂直天井衝突等の注意を促すこととしている。映像動作系にはグリーン色を施して、被検者に装置が最も接近するため恐怖心の軽減や操作者への照明の反射防止,Cアーム4Aの回転位置等の認識向上を図っている。
【0146】
図15は、天板1A,天板上下支持部3Aなどの天板動作系の部材の先端にピンク色を、そしてCアーム4A,I.I.などの映像系の部材にグリーン色を施した図である。
【0147】
図16は、図14に対応して天板動作系のボタンにピンク色を、そして映像系のボタンにグリーン色を施した図である。
【0148】
以下、操作援助について説明する。
【0149】
操作援助は図,メッセージ,音声(警告音を含む)で行う。操作援助時に画面表示部上に表示される画面については装置の正面(A遠隔操作卓から見る),側面(B被検者側から見る)の図で行い、さらにそれぞれの図に矢印を組み合わせて、操作者に対してインターロックの内容が判り易い様に画面表示部上に表示する。天板とCアームとX線装置の位置状態と矢印を組み合わせて操作援助をより操作者に判り易くする。送るコード内容はi)矢印の位置コード、ii)エラーエードの2つとする。
【0150】
矢印は図14に示される。各矢印のコードは表1操作援助時の矢印位置に定義される。
【0151】
図17(a)は、映像動作系と天板動作系の動きを正面からみた図、図17(b)はそれらの動きを側面からみた図である。
【0152】
【表1】

次に、画面表示部133に表示するグラフィック画面について説明する。
【0154】
図18は、グラフィック画面を説明するための図である。
【0155】
画面上部には、象形文学によって天板1A,Cアーム4A,X線管装置7A,8Aの操作状態が表示される。すなわち、Cアーム4Aの回転角を示す象形161,Cアームのスライド角を示す象形162,X線管装置の前後動を示す象形163,天板とX線管装置との位置関係を示す象形164,天板の起倒動を示す象形165,起倒動中心の高さを示す象形166,天板のローリングを示す象形167等からなる。これらは他の運動を示す象形と変更可能である。各象形文字の下には運動の状態が数値で示してある。画面の右半分にはタッチ検出時表示170がなされる。また、操作中のボタン171が表示される(操作援助の操作器を表示)。また、その下側にはエラーコードおよびエラーメッセージ表示172がなされる。
【0156】
更に、NEXT切替173,AUTO POSITIONING画面切替174が表示される。
【0157】
画面左半分には、天板1AとCアーム4AとX線管装置7A,8Aの位置状態およびそれらの運動方向が矢印で表示される。
【0158】
天板の角度は、立位/中間位/水平位/逆傾位とする。AP/PA(オーバー/アンダー)でX線管装置、I.I.の表示位置を切り替える。更にT−X軸の位置により天板を伸ばした状態を付け加える。つまり正面での操作援助時に使用する装置の状態は図19に示すように8パターンで表示を行う。
【0159】
側面側についてはPA位(アンダー)のとき+45/0/−45/−90,AP位(オーバー)のとき+90/+45/0/−45とし、AP/PA(オーバー/アンダー)でX線管装置,I.I.の表示位置を切り替える。つまり側面での操作援助時に使用する装置の状態は図19に示すように8パターンで表示を行う。
【0160】
図20に操作援助の正面図、立位時の図と矢印とが表示される。1つの運動は1または2の矢印で図14に示すようにその方向が示される。
【0161】
図21に操作援助の正面図、中間位の図と矢印とが表示される。
【0162】
図22に操作援助の正面図、水平時の図と矢印とが表示される。
【0163】
図23に操作援助の正面図、逆傾の図と矢印とが表示される。
【0164】
上記記載の各ジョイスティックを中心に選択スイッチを放射状に配置したことにより、各ジョイスティック親指と人差し指の間で保持し、親指と人差し指を除く他の指で選択スイッチを操作することが可能となり、操作性が良く、操作者の負担を低減するとともに、操作中の注意を被検査者に向けることができ、安全な装置を提供することになる。
【0165】
また、左右のジョイスティックの間に各動作の現在位置や操作ガイドなどを表示する表示部を配置したことにより、常に操作者の中心に表示画面が配置されることとなり、画面に表示された情報の視認性がよく、操作性のよい装置を提供することになる。
【0166】
【発明の効果】
本発明によれば、天板,Cアーム更にはX線装置の運動方向が画面に表示されるので、現在の位置からどのように移動していくかを操作者が視覚的に確実に把握できるから安全性を向上したX線透視撮影装置および方法を提供することができる。
【0167】
また、CPUは装置を構成する部材間の接近あるいは干渉を回避する処理をした上で、天板,Cアーム,X線装置の運動を許可・表示することにしているので、表示矢印が示されている限り、その方向の運動は安全であると操作者は認識することができるので、有利な操作援助表示がなされていることになる。
【図面の簡単な説明】
【図1】本発明の実施例の全体概略図。
【図2】X線透視撮影装置の一部を詳細に示す正面図。
【図3】図2の右側面図。
【図4】図1の平面図。
【図5】図4の天板後端部を拡大して示した平面図。
【図6】図5のA−A矢視断面図。
【図7】図5のB−B矢視断面図。
【図8】図5の右側面図で架台からカバーを取り外した状態を示す状態図。
【図9】図8の動作を説明する説明図。
【図10】ブロック図。
【図11】近接操作卓の盤面平面図。
【図12】図11の側面図。
【図13】ジョイスティック詳細図。
【図14】近接操作卓の盤面に配設されるボタンの配置図。
【図15】カラー色を施した全体概略図。
【図16】カラー色を施した近接操作卓の盤面図。
【図17】装置を構成する部材の運動方向を示す図。
【図18】グラフィック画面図。
【図19】パターン図。
【図20】操作援助画面図。
【図21】操作援助画面図。
【図22】操作援助画面図。
【図23】操作援助画面図。
【符号の説明】
1A…天板、2A…天板回転支持部、3A…天板上下支持部、4A…Cアーム、5A…Cアーム保持部、6A…スライド板、7A…X線管装置、8A…X線受像装置(X線イメージインテンシファイヤI.I.)、9A…支柱、10A…ケーブル、11A…ベース部、71…機構部、72…姿勢制御回路、73…近接操作卓、74…スピーカ、75…遠隔操作卓、76…各種機構、77…モータ、78…位置検出器、79…操作スイッチ、80…表示画面部、81…タッチパネル、82…パワアシスト操作部、141…円弧の第1の連続線、142…円弧の第2の連続線、151…スカート部、152…くびれ部。
Claims (4)
- 被検体を載せる天板と、該天板を起倒動,左右動,長手動,上下動およびローリング運動を可能に支持する天板機構部と、前記天板を挟んで配設されるX線管装置とX線受像装置を含むX線装置と、その両端部に前記X線管装置と前記X線受像装置を対向支持するCアームと、該Cアームを回転,スライド,上下動作、長手動の運動を可能に支持するCアーム機構部と、前記天板機構部と前記Cアーム機構部に設けられる位置検出器からの位置情報を介して前記天板と前記Cアームの移動量を計算して前記天板と前記Cアームが衝突、干渉しないように動作制御する動作制御装置と、前記天板と前記Cアームの動作を指示する操作卓を備えたX線透視撮影装置において、
前記操作卓は、前記天板と前記Cアームの動作状態を表示する表示装置と、該表示装置の表示画面処理を行う表示画面制御装置とを備え、
前記表示画面制御装置は、前記動作制御装置からの前記位置情報と動作制御信号に基づいて、前記天板と前記Cアームと前記X線装置の位置状態図とともに、前記天板と前記Cアームが衝突、干渉することなく動作可能な運動方向を示す矢印を前記表示装置に表示する
ことを特徴とするX線透視撮影装置。 - 請求項1記載のX線透視撮影装置において、
前記表示画面制御装置は、複数の位置状態図から当該位置情報に対応する位置状態図を表示することを特徴とするX線透視撮影装置。 - 請求項1または2記載のX線透視撮影装置において、
前記表示画面制御装置は、前記天板と前記Cアーム及び前記X線装置のそれぞれの操作状態を示す数値表示部を、前記矢印とともに表示される位置状態図と対比して前記表示装置に表示する
ことを特徴とするX線透視撮影装置。 - 請求項1記載のX線透視撮影装置において、
前記操作卓にスピーカを備え、前記表示画面制御装置は、前記位置情報に基づいて表示画面処理を行うと共に前記スピーカを介して操作状況を音声として発声する
ことを特徴とするX線透視撮影装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP09178698A JP3762539B2 (ja) | 1998-04-03 | 1998-04-03 | X線透視撮影装置および方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP09178698A JP3762539B2 (ja) | 1998-04-03 | 1998-04-03 | X線透視撮影装置および方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005317539A Division JP4059266B2 (ja) | 2005-10-31 | 2005-10-31 | X線透視撮影装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11285492A JPH11285492A (ja) | 1999-10-19 |
| JP3762539B2 true JP3762539B2 (ja) | 2006-04-05 |
Family
ID=14036294
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP09178698A Expired - Lifetime JP3762539B2 (ja) | 1998-04-03 | 1998-04-03 | X線透視撮影装置および方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3762539B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008167782A (ja) * | 2007-01-09 | 2008-07-24 | Hitachi Medical Corp | 透視撮影装置 |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19958864A1 (de) * | 1999-12-07 | 2001-06-13 | Philips Corp Intellectual Pty | Röntgeneinrichtung |
| JP3832173B2 (ja) * | 2000-02-08 | 2006-10-11 | コニカミノルタホールディングス株式会社 | 医用画像読取装置 |
| JP4016636B2 (ja) * | 2001-10-24 | 2007-12-05 | 株式会社島津製作所 | アーム搭載型x線撮影装置 |
| DE10243162B4 (de) * | 2002-09-17 | 2005-10-06 | Siemens Ag | Rechnergestütztes Darstellungsverfahren für ein 3D-Objekt |
| JP4254284B2 (ja) * | 2003-03-18 | 2009-04-15 | 株式会社島津製作所 | X線撮影装置 |
| JP2006055518A (ja) * | 2004-08-23 | 2006-03-02 | Shimadzu Corp | X線診断装置 |
| JP5004416B2 (ja) * | 2004-11-30 | 2012-08-22 | 株式会社日立メディコ | 医用x線透視撮影装置 |
| JP4928780B2 (ja) * | 2005-12-16 | 2012-05-09 | 株式会社東芝 | X線診断装置 |
| JP5426826B2 (ja) * | 2006-12-28 | 2014-02-26 | キヤノン株式会社 | 放射線撮像装置、放射線撮像装置の作動方法及び記憶媒体 |
| JP2010017391A (ja) * | 2008-07-11 | 2010-01-28 | Shimadzu Corp | 放射線撮影装置 |
| JP2010082319A (ja) * | 2008-10-01 | 2010-04-15 | Toshiba Corp | X線撮影装置および寝台装置 |
| JP4913168B2 (ja) * | 2009-01-19 | 2012-04-11 | 株式会社東芝 | X線診断装置 |
| JP4998531B2 (ja) * | 2009-09-30 | 2012-08-15 | 株式会社島津製作所 | X線撮影装置 |
| CN103957798B (zh) | 2011-11-30 | 2016-05-04 | 富士胶片株式会社 | 放射线拍摄系统 |
| JP5999496B2 (ja) * | 2012-10-01 | 2016-09-28 | 株式会社島津製作所 | 放射線撮影装置 |
| EP2952932B1 (en) * | 2013-01-31 | 2017-11-01 | Shimadzu Corporation | Positron ct apparatus |
| JP2014168571A (ja) * | 2013-03-04 | 2014-09-18 | Toshiba Corp | X線診断装置 |
| JP2017153591A (ja) * | 2016-02-29 | 2017-09-07 | 東芝メディカルシステムズ株式会社 | X線診断装置 |
| IT201700114495A1 (it) * | 2017-10-11 | 2019-04-11 | General Medical Merate S P A | Sistema per il controllo di almeno un movimento di un componente motorizzato di un’apparecchiatura radiologica e apparecchiatura radiologica che lo utilizza |
| WO2024042823A1 (ja) * | 2022-08-23 | 2024-02-29 | 株式会社島津製作所 | X線撮影装置 |
-
1998
- 1998-04-03 JP JP09178698A patent/JP3762539B2/ja not_active Expired - Lifetime
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008167782A (ja) * | 2007-01-09 | 2008-07-24 | Hitachi Medical Corp | 透視撮影装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11285492A (ja) | 1999-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4059266B2 (ja) | X線透視撮影装置 | |
| JP3762539B2 (ja) | X線透視撮影装置および方法 | |
| CA2205362C (en) | Universal radiographic room | |
| JP2001137221A (ja) | バイプレーン血管撮影・ct装置 | |
| WO2001010300A1 (fr) | Appareil de radiographie mobile | |
| JPH06133965A (ja) | X線診断用寝台 | |
| JPH11285491A (ja) | X線透視撮影装置 | |
| JP2001204720A (ja) | X線検査装置 | |
| JPH08275936A (ja) | X線撮影装置 | |
| JP5138985B2 (ja) | X線検出装置およびx線撮影装置 | |
| JPH08275939A (ja) | X線撮影装置 | |
| JP6750746B2 (ja) | 放射線撮影装置 | |
| JP3279496B2 (ja) | X線検査装置 | |
| JP2004313739A (ja) | X線撮像装置 | |
| JP3518573B2 (ja) | X線検査装置 | |
| JPH08275941A (ja) | X線撮影装置 | |
| JP3638353B2 (ja) | X線診断装置 | |
| JP4016636B2 (ja) | アーム搭載型x線撮影装置 | |
| JP5004416B2 (ja) | 医用x線透視撮影装置 | |
| JP3628153B2 (ja) | パノラマx線撮影装置 | |
| JP2004160263A (ja) | X線撮影装置 | |
| JP4137437B2 (ja) | 医用x線装置 | |
| JP4314013B2 (ja) | X線透視撮影装置 | |
| JP2006255282A (ja) | X線撮影装置 | |
| KR101572624B1 (ko) | 엑스선 촬영장치 및 그 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050811 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050830 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051031 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20051220 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060113 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090120 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100120 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100120 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110120 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110120 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120120 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130120 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140120 Year of fee payment: 8 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R370 | Written measure of declining of transfer procedure |
Free format text: JAPANESE INTERMEDIATE CODE: R370 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| EXPY | Cancellation because of completion of term |