JP2017153591A - X線診断装置 - Google Patents
X線診断装置 Download PDFInfo
- Publication number
- JP2017153591A JP2017153591A JP2016038004A JP2016038004A JP2017153591A JP 2017153591 A JP2017153591 A JP 2017153591A JP 2016038004 A JP2016038004 A JP 2016038004A JP 2016038004 A JP2016038004 A JP 2016038004A JP 2017153591 A JP2017153591 A JP 2017153591A
- Authority
- JP
- Japan
- Prior art keywords
- ray
- detector
- movement
- operator
- ray detector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 25
- 238000003745 diagnosis Methods 0.000 claims description 2
- 238000000034 method Methods 0.000 abstract description 27
- 238000002594 fluoroscopy Methods 0.000 abstract description 4
- 230000000007 visual effect Effects 0.000 abstract description 3
- 230000001678 irradiating effect Effects 0.000 abstract description 2
- 230000006870 function Effects 0.000 description 90
- 238000012545 processing Methods 0.000 description 34
- 238000012986 modification Methods 0.000 description 13
- 230000004048 modification Effects 0.000 description 13
- 238000010586 diagram Methods 0.000 description 10
- 238000003384 imaging method Methods 0.000 description 8
- 238000013459 approach Methods 0.000 description 7
- 230000003287 optical effect Effects 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 210000004204 blood vessel Anatomy 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 239000003990 capacitor Substances 0.000 description 2
- 230000008054 signal transmission Effects 0.000 description 2
- 239000010409 thin film Substances 0.000 description 2
- 239000002872 contrast media Substances 0.000 description 1
- 239000010408 film Substances 0.000 description 1
- 239000002784 hot electron Substances 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/547—Control of apparatus or devices for radiation diagnosis involving tracking of position of the device or parts of the device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4429—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units
- A61B6/4435—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being coupled by a rigid structure
- A61B6/4441—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being coupled by a rigid structure the rigid structure being a C-arm or U-arm
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/06—Diaphragms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4429—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units
- A61B6/4452—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being able to move relative to each other
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/46—Arrangements for interfacing with the operator or the patient
- A61B6/461—Displaying means of special interest
- A61B6/465—Displaying means of special interest adapted to display user selection data, e.g. graphical user interface, icons or menus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/04—Positioning of patients; Tiltable beds or the like
- A61B6/0407—Supports, e.g. tables or beds, for the body or parts of the body
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Public Health (AREA)
- High Energy & Nuclear Physics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Biophysics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Optics & Photonics (AREA)
- Human Computer Interaction (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Pulmonology (AREA)
- Theoretical Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
Abstract
Description
ス(以下、これらを総称してデバイスと称する)を挿入する手技が行なわれている。この
ような手技を支援するため、血管に造影剤を注入した状態の血管造影像を収集表示するX
線診断装置が知られている。
透視像をモニタに表示させた状態で、オペレータがモニタを参照しながら行う。
検体表面のデバイスの挿入部位を確認しながら手技を進めていく必要がある。しかし、オ
ペレータが手元を確認する際に、X線検出器が被検体直上にあることで視界の妨げとなる
おそれがある。
X線管とX線検出器を対向して保持するCアームを傾けて手技を行なうことがある。この
とき、X線検出器が天板と接触する恐れがある。
位置を制御することが可能なX線診断装置を提供することである。
照射方向と、X線を検出する検出器とが被検体を挟んで互いに対向するように支持するア
ームと、X線を所定の大きさの照射範囲に絞るX線絞りと、X線絞りの制御を行うX線絞
り制御部と、照射範囲をX線絞り制御部から受け付けて、検出器の移動量を算出する移動
制御部と、移動制御部が算出した移動量に基づいて、検出器を検出面に対して平行方向に
移動させる検出器移動部を具備する。
<構成要素>
図1は、第1の実施形態に係るX線診断装置100の構成を示したブロック図である。
図1のX線診断装置100は、高電圧発生装置15と、被検体Pに対してX線を照射する
X線発生装置10と、X線絞り102の駆動制御を行うX線絞り駆動装置14を備えてい
る。
極と陰極の間に印加する高電圧を発生させてX線管101へ出力するための電源装置であ
る。
するX線絞り102を備える。
空管であり、陰極(フィラメント)より放出された熱電子を高電圧によって加速させ、こ
の加速電子をタングステン陽極に衝突させることでX線を発生させる。
は、X線管101によって発生されたX線が、被検体Pの関心領域にのみ照射されるよう
にX線照射範囲を絞り込む機能を有する。例えば、X線絞り102は4枚の絞り羽根を有
し、これらの絞り羽根をスライドさせることで、X線の照射範囲を任意の大きさに絞り込
む。また、X線絞り102の絞り羽根によって形成され、X線が透過可能な領域をX線絞
り102による開口領域と定義する。
02の開口領域の制御を行う、複数のモータ、ギアにて構成される装置である。具体的に
は、オペレータが入力装置18を介して入力した被検体Pにおける関心領域とX線照射範
囲が合うように、X線絞り駆動装置14はX線絞り102の絞り羽根を駆動させる制御を
行う。ここで、被検体Pにおける関心領域とは、被検体Pの病変部や治療部位を含む領域
のことであり、例えば、X線画像上にてオペレータによって指定される。また、X線絞り
駆動装置14はX線絞り102による開口領域の大きさを検出する機能を併せ持つ。X線
絞り102による開口領域の検出方法は、開口領域の面積を検出しても良いし。絞り羽根
の移動量から検出しても良い。
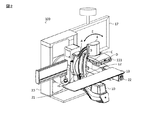
板駆動装置131とを有する。Cアーム12及び天板13について説明するために、図2
を参照する。
、架台20、Cアーム12、及び天板13に関して説明を行う。
を介して天板13を保持する筐体である。
接続装置21は、Cアーム12をCアーム12の形状に沿うようにスライド可能に保持す
る筐体である(矢印A)。Cアーム12は、Cアーム接続装置21を中心としてCアーム
12の上下を180度入れ替え可能な方向へと回転することが可能である(矢印E)。C
アーム12は、X線発生装置10のX線照射方向とX線検出装置11を被検体Pと天板1
3を挟んで対向するように支持することで、天板13上に横臥された被検体PのX線撮影
を行うことが可能な構成を有する。Cアームに取り付けられたX線検出器111は、床面
に対して上下方向(矢印B)及び、水平方向(矢印C及びD)に移動可能な構成を有する
。
介して架台20と接続されている。天板保持装置22は、天板13を保持する筐体である
。
込んでCアーム12をスライド運動、回転運動、直線運動させる。Cアーム駆動装置12
1は複数のモータ等の動力源によって構成される。また、Cアーム駆動装置121には、
Cアームの角度または姿勢や、位置情報を検出するための図示しないCアーム状態検出器
が備えられている。Cアーム状態検出器は、例えば回転角や移動量を検出するポテンショ
メータや、位置検出センサであるエンコーダ等で構成される。Cアーム12または天板1
3が移動することにより、被検体Pに対するX線発生装置10及びX線検出装置11の位
置関係が変化する。より具体的にエンコーダに関しては、例えば磁気方式、刷子式、ある
いは光電式等となる、いわゆるアブソリュートエンコーダを使用することが可能である。
また、Cアーム状態検出器は、回転変位をデジタル信号として出力するロータリエンコー
ダあるいは直線変位をデジタル信号として出力するリニアエンコーダなど、様々な種類の
位置検出機構を用いて構成することができる。また、上記で説明したCアーム12の移動
を実現する機構は一例に過ぎず、本発明が、これらの形態に限定されるものではない。
で、天板13を床面に対して水平方向や垂直方向に移動させる。また、天板駆動装置13
1は、複数のモータ等の動力源によって構成される。Cアーム12または天板13が移動
することにより、被検体Pに対するX線発生装置10及びX線検出装置11の位置関係が
変化する。
を反映したX線投影データを生成するX線検出装置11を有する。
検出器111と、オペレータからの入力操作を受け付け、X線検出器111の移動方向を
決定する移動操作装置112と、X線検出器111を検出器面に対して平行方向に移動す
るX線検出器移動装置113と、X線検出器111の検出器に対して平行な面上での位置
情報を検出するセンサを備えて構成される。
成される。FPDは微小な検出素子を列方向及びライン方向に2次元的に配列して構成さ
れる。各々の検出素子はX線を感知し、入射X線量に応じて電荷を生成する光電膜と、こ
の光電膜に発生した電荷を蓄積する電荷蓄積コンデンサと、電荷蓄積コンデンサに蓄積さ
れた電荷を所定のタイミングで出力するTFT薄膜トランジスタから構成されている。X
線検出器111は、TFT薄膜トランジスタに蓄積された電荷を出力し、出力された電荷
から投影データを生成する投影データ生成回路を備えている。投影データは、一旦記憶回
路19へと出力される。
ッチパネル、検知器(接触検知器、加速度検知器、光学検知器)等にて構成される。移動
操作装置112は、オペレータからの入力操作を受け付けてX線検出装置11を移動させ
る旨の命令を、X線検出器移動装置113に伝達する。また、移動操作装置112は、X
線検出器111の側面に配置される構成に限定されず、例えば被検体Pが載置される天板
13に配置されても良い。天板13上に移動操作装置112が配置されることにより、移
動操作装置112を操作することによりX線検出器111が移動しても移動操作装置11
2の位置は移動しないため、オペレータは移動操作装置112の操作が行いやすくなる。
112は、架台20側とは反対側のX線検出器111の側面に配置される。例えば、移動
操作装置112には所望の移動方向をオペレータから受け付けるための複数のスイッチが
配置されており、オペレータは各スイッチの中から、移動させたい方向に応じて所望のス
イッチを選択することが可能な構成を有する。移動操作装置112として配置されるスイ
ッチの一例として、X線検出器111を、移動操作装置112の配置される面の正面方向
から「左移動」、「左奥移動」、「奥方向移動」、「右奥移動」、「右移動」、「ホーム
」等が挙げられる。各移動方向に関する説明は、後述する処理回路16の検出器移動制御
機能166に関する説明にて詳述する。
11の移動方向に関する情報を受け付け、X線検出器111を駆動、移動させる。X線検
出器移動装置113は、複数のモータ、ギアにて構成される。また、X線検出器移動装置
113は、X線絞りによる開口領域の大きさによって決定されるX線照射範囲を後述する
処理回路16のX線絞り制御機能165から読み込んで、X線照射範囲を超えない範囲で
X線検出器111を移動させる。ここで、X線照射範囲とはX線検出器111上において
X線が照射される範囲を示している。図4及び図5を用いて、X線検出器移動装置113
の詳細に関する説明を行う。
検出器移動装置113は、互いに直交する2軸(図に示す▲(1)▼と▲(2)▼の方向
)が独立して動作する構成を有し、各軸の動作は、移動操作装置112から入力された移
動方向に対して、処理回路16の検出器移動制御機能166から算出されたX線検出器1
11の移動範囲を超えない範囲にて移動量が算出される。例えば、X線検出器111はオ
ペレータが移動操作装置112を押すなどして操作している時に移動し、オペレータが移
動操作装置112から手を離すと、X線検出器111は停止するように構成する。また、
オペレータによる入力操作を移動操作装置112が受け付けると、処理回路16の検出器
移動制御機能166によって算出されたX線検出器111の移動限界にX線検出器111
が到達するまでX線検出器111は自動で移動することにしても良い。
に、X線検出器111の背面に刻まれた検出器背面ギア3aと、移動ユニット40aの中
央付近に内蔵されているモータ40bとギア40caを介して接続されたギア40cbと
が噛み合う構成を有し、モータ40bを正逆回転することで、▲(1)▼方向への平行移
動を可能としている。モータ40bを駆動させるための電力供給ラインは、後述する処理
回路16などから、Cアーム12を通って、移動ユニット40aのモータ40bへと配線
される。また、モータ40bの制御信号送信ラインも同じ経路を辿って配線される。
また、図4における▲(2)▼の方向への平行移動は、図5(b)に示すように、移動
ユニット背面ギア40dと検出器サポート装置4の中央付近に内蔵されているモータ4a
とギア4baを介して接続されたギア4bbとが噛み合う構成となっており、モータ4a
を正逆回転することで、▲(2)▼方向への平行移動を可能としている。モータ4aを駆
動させる電力供給ラインは、後述する処理回路16などから、Cアーム12を通って、モ
ータ4aへと配線する。また、モータ4aの制御信号送信ラインも同じ経路を辿って配線
される。ここで、検出器サポート装置4とはCアーム12とX線検出装置11を接続する
筐体である。
の斜め方向をも含む平行移動が可能となる。
1の移動限界が近い場合はX線検出器111の移動速度を遅くすることにしても良い。こ
こでの移動限界とは、オペレータによって指定された方向に対してX線検出器111が移
動すると、X線検出器111がX線照射範囲を逸脱する範囲のことを指す。X線検出器1
11の移動速度を遅くする方法としては、例えば、移動限界が近づくにつれて、移動速度
を段階的に遅くしても良いし、移動限界までの距離に比例して移動速度を線形的に遅くし
ても良い。これにより、オペレータに対してX線検出器111をオペレータが指定した方
向に対して移動することができないことを通知することが可能になる。また、オペレータ
へのX線検出器111の移動可能範囲の限界の通知方法は、X線検出器111の移動速度
に限られたものではなく、例えば音によってオペレータに通知しても良いし、表示装置1
7に通知することにしても良い。また、移動操作装置112を構成するスイッチ等が発光
することでX線検出器111の移動可能範囲の限界を通知しても良いし、X線検出器11
1の側面に別途設けられたランプ等が発光することにて通知することにしても良い。
ば、図6(a)の状態においてはX線検出器111がオペレータの視野を遮っており、オ
ペレータは被検体Pに対して処置を行う際に、手元の状況を十分に確認することができな
い。そのため、オペレータがX線検出器111の側面に配置された移動操作装置112を
操作することでX線検出器111の移動方向を選択すると、図6(b)に示すようにX線
検出器111はオペレータによって選択された方向に移動する。これによって、オペレー
タはX線検出器111によって視野を遮られることなく、処置中の手元の様子を確認する
ことが可能になる。
8と、記憶回路19とを有する。
された各種X線画像データの表示を行うための透視モニタ、他のモダリティの画像表示等
を行う参照モニタ、撮影条件等の入力やシステムを制御するための各種入力・設定画面を
表示するシステムモニタを有する。これらのモニタは、それぞれ別体で構成されても良い
し、大型モニタを、表示領域を分割することによって実現しても良い。
メインコンソール、キーボード、マウスなどの入力デバイス、およびフットスイッチなど
を備える。これらの入力インターフェイスにより、被検体情報の入力、X線照射条件(S
ID値、管電圧、管電流等)や画像倍率の設定、回転撮影などの撮影シーケンス選択、被
検体の撮像位置及び方向の設定、撮影開始コマンド等の各種コマンド入力を行うことがで
きる。
作成された投影データと投影データから生成されるX線画像データや処理回路16によっ
て行われる各機能をプログラムの形式で保存する。記憶回路19は、例えば、RAM(R
andom Access Memory)、フラッシュメモリ等の半導体メモリ素子や
ハードディスク、光ディスク等によって構成される。
63と、画像処理機能164と、X線絞り制御機能165と、検出器移動制御機能166
とを備えて構成される。
164、X線絞り制御機能165、及び検出器移動制御機能166を統括して制御する。
関する情報を受け付けて、Cアーム駆動装置121及び天板駆動装置131の制御を行う
。
装置15における管電流、管電圧、照射時間等のX線照射条件の制御を行う。
って入力される入力信号を受け付けて、所望のX線絞り102の開口領域を得るためにX
線絞り駆動装置14を駆動させる。
の位置情報を読み込んでX線検出器111の移動範囲を算出する。より詳細には、移動操
作装置112を介して、X線検出装置11の移動に関する情報が入力されると、検出器移
動制御機能166はその入力情報を受け付ける。次に検出器移動制御機能166は、X線
絞り制御機能165からX線絞り102の開口領域に関する情報と、センサ114からX
線検出器111の現在の位置情報を受け付ける。検出器移動制御機能166は、X線絞り
102の開口領域の大きさに対する、X線検出器111上での検出領域を算出する。例え
ば、40cm四方のX線検出器111に対して、X線検出器111と中心を共有する20
cm四方の正方形の範囲が検出素子の使用範囲である場合には、X線検出器111は平行
方向の各方向へ10cm移動することが可能となる。また、検出器移動制御機能166は
、算出したX線検出器111の移動可能な範囲に関する情報を用いて、その移動可能な範
囲に応じて、X線検出器111を移動させるようX線検出器移動装置113を駆動させる
。また、検出器移動制御機能166は、算出したX線検出器111の移動可能な範囲に対
応した各移動方向に関する情報を、表示装置17や移動操作装置112に表示、出力する
ことにしても良い。このとき、移動操作装置112が図3に示すようなX線検出器111
の側面に配置されたスイッチにて構成される場合には、各スイッチの中で検出器移動制御
機能166が移動可能と判断した方向のスイッチのみを検出器移動制御機能166が点灯
、点滅等を行うことで通知することにしても良い。
19に記憶させておき、移動後に移動前の位置にX線検出器111を戻すように制御を行
うことにしても良い。このとき、例えばオペレータは移動操作装置112の「ホーム」ボ
タンを操作することでX線検出器111を移動前の位置へと戻すことが可能である。記憶
回路19に記憶されるX線検出器111の移動前の位置情報は、移動前の直前の位置を示
す情報であっても良いし、手技中の任意の位置であっても良い。X線検出器111の位置
情報は、例えば各平行方向への移動量が0である位置からの各方向への移動量から算出す
る。手技中の任意の位置を記憶回路19にて記憶しておく場合には、検出器移動制御機能
166は、オペレータからの入力情報を入力装置18または移動操作装置112を介して
受け取り、その時点でのX線検出器111の位置情報を記憶回路19に記憶させることに
しても良い。また、X線検出器111及びCアーム12が所定時間以上移動しなかった場
合に、その時点におけるX線検出器111の位置情報を記憶回路19に記憶することにし
ても良い。
11の位置からの移動距離が最大となる方向へ移動させることにしても良い。例えば、X
線検出器111をオペレータに対して一方向ではなく、奥方向と左右方向を複合した方向
へと移動させる。
能163、画像処理機能164、X線絞り制御機能165、検出器移動制御機能166に
て行われる各処理機能は、コンピュータによって実行可能なプログラムの形態で記憶回路
19に記録されている。処理回路16は、プログラムを記憶回路19から読み出し、実行
することで各プログラムに対応する機能を実現するプロセッサである。換言すると、各プ
ログラムを読み出した状態の処理回路16は、図1の処理回路16内に示された各機能を
有することとなる。なお、図1においては単一の処理回路16にてシステム制御機能16
1、駆動制御機能162、X線制御機能163、画像処理機能164、X線絞り制御機能
165、検出器移動制御機能166にて行われる処理機能が実現されるものとして説明し
たが、各プロセッサがプログラムを実現することにより機能を実現するものとしても構わ
ない。
図7は、第1の実施形態に係るフローチャートである。まず、オペレータによってX線
診断装置100の使用モードが決定される。第1の実施形態ではX線検出装置11が被検
体Pに対して上側に配置されるPAモード(Posterior−Anteriorモー
ド)を例として説明する。PAモードにおいては、X線検出器111が被検体に対して直
上に配置されるため、X線検出器111がオペレータの視野を遮ることになる。まず、オ
ペレータによってX線検出装置11が被検体Pに対して直上に配置されるPAモードが選
択される(ステップS101)。
表示されるX線画像を参照し、入力装置18を介してX線照射範囲を設定し、設定された
X線照射範囲に対してX線透視を行う(ステップS102)。このとき、設定されたX線
照射範囲外の領域にはLIH(Last Image Hold)画像を表示して、X線
照射範囲を設定する直前のX線照射範囲外の領域のX線画像を表示することにしても良い
。
X線絞り制御機能165から読み込み、センサ114からX線検出器111の位置情報を
読み込むことでX線検出器111の移動可能な範囲を算出する(ステップS103)。
実行する。このとき、オペレータは移動操作装置112を操作し、X線検出器111を所
望の方向へ移動させるための入力操作を実行する(ステップS104)。
04にてオペレータに指定された移動方向に対して、X線検出器111が移動限界に位置
しているか否かが判定される(ステップS105)。このとき、オペレータが指定した方
向に対してX線検出器111が移動するとX線照射範囲が逸脱する場合には、X線検出器
111は検出器移動制御機能166によって移動限界に位置していると判定される。X線
検出器111が移動限界に位置する場合は、処理を終了する(ステップS105、YES
)。X線検出器111が移動限界に位置していない場合は、ステップS106へと進み、
処理が継続される(ステップS105、NO)。
オペレータによって指定された方向へと移動する(ステップS106)。
移動操作を継続するか否かが検出器移動制御機能166によって判定される(ステップS
107)。移動操作を継続する場合には、ステップS104に戻り、X線検出器111の
移動方向に関する情報をオペレータから再度受け付ける(ステップS107、YES)。
X線検出器111の移動操作を継続しない場合には(ステップS107、NO)、X線検
出器111の移動は終了する(ステップS108)。
ータからの入力情報を受け付け、X線照射範囲を逸脱しない範囲にて、X線検出器111
を所望の方向に移動させ、オペレータの手元の視野を確保することが可能になり、オペレ
ータの手技を補助することが可能となる。
第1の実施形態では、移動操作装置112を設けてオペレータからの入力操作を受け付
けて、X線検出器111の移動方向を設定する場合について説明した。本変形例では、移
動操作装置112に替えて、センサ114を介してオペレータからX線検出器111の移
動方向に関する入力情報を受け付ける場合について説明する。
1を押すなどして力が加えられた場合に、その力の加えられた方向を検出する。そのため
、本変形例におけるセンサ114は、タッチセンサや加速度センサによって構成される。
センサ114はオペレータによってX線検出装置11に加えられた力の方向を検出すると
、その情報を検出器移動制御機能166へと出力する。検出器移動制御機能166は、X
線検出器111が移動可能な範囲を算出して、その移動可能な範囲に応じて、X線検出器
移動装置113を駆動させる。これによって、オペレータがX線検出器111を移動させ
たい方向に対して、X線検出装置11に力を加えることでX線検出器111を移動させる
ことが可能になる。
るものとして説明したが、単にオペレータの接触を検出することにしても良い。その場合
、センサ114は、X線検出器111の各側面に少なくとも1つ以上配置され、オペレー
タが触れた側面に合わせてX線検出器111の移動方向を決定する構成を有すれば良い。
例えば、オペレータがオペレータから見てX線検出器111の右側面を触れた場合にはX
線検出器111は左方向へ移動し、X線検出器111のオペレータに対向する側面を触れ
た場合には、オペレータに対して奥方向に移動することにする。
以上説明した変形例に係るX線診断装置100は、オペレータがX線検出器111を移
動させたい方向に対して、所定の力を加えることで、X線照射範囲を逸脱しない範囲にて
、X線検出器111を移動させることが可能になる。
第1の実施形態及び第1の実施形態の変形例1では、オペレータからの入力操作を受け
付けて、X線検出器111の移動方向を読み込み、その方向に対してX線検出器111を
移動させる場合について説明した。本変形例では、オペレータの位置と表示装置17の配
置に応じてX線検出器111を移動させる場合について、図8を参照して説明する。
を移動させる変形例1を説明するための図である。
れる。また、センサ114bはオペレータの位置を算出するために、複数の光学カメラに
よって構成されるステレオカメラにて構成されることが望ましい。センサ114bは、図
8にて示すように、X線検出器111の側面に配置される。センサ114bによって取得
されたオペレータの位置情報は、検出器移動制御機能166に送信される。検出器移動制
御機能166は、センサ114bによって取得されたオペレータの位置情報に応じて、X
線検出器111を移動させる。例えば、図8(a)に示すように、オペレータと表示装置
17を結ぶ直線状にX線検出装置11があり、オペレータの視野がX線検出器111によ
って遮られている場合には、図8(b)に示すように、検出器移動制御機能166はX線
検出器111をオペレータから見て左方向、奥方向、及び左奥方向に移動させる。このと
きの移動距離は、第1の実施形態と同様にX線照射範囲を超えない範囲である。
ータの位置情報から、X線検出器111を自動で移動させることが可能となる。これによ
り、オペレータが被検体Pの手技中に表示装置17を参照するための視野を確保すること
が可能になる。
第1の実施形態では、オペレータからの入力情報を処理回路16が受け付けて、X線検
出器111の移動を行う場合や、オペレータと表示装置17の位置関係をセンサ114が
処理回路16に出力して、X線検出器111を移動させる場合について説明した。第2の
実施形態では、X線検出器111がオペレータや天板13と干渉する危険性がある場合に
、X線検出器111を移動させる場合について説明する。まず、X線検出器111が被検
体Pに対して上側に配置されるPAモード(Anterior−Posteriorモー
ド)での実施について説明する。
ブロック図である。第2の実施形態における処理回路16bは、第1の実施形態の処理回
路16に干渉回避機能167が追加された構成を有する。
や天板13と接触した場合、若しくはX線検出器111とオペレータや天板13が所定の
距離以下に接近すると、X線検出器111を天板13との干渉を避ける方向に自動で移動
させる機能を有する。このとき、X線検出器111の移動のためのオペレータ等からによ
る入力信号は必要とされない。例えば、オペレータがCアーム12を操作することでX線
検出器111がオペレータに接触する場合について図10を用いて説明する。
から所定の角度傾いて、X線検出器111がオペレータと接触した場合を示している。干
渉回避機能167は、Cアーム12が回転動した状態においてX線検出器111がオペレ
ータと接触した場合、若しくは所定の距離以下に接近した場合に、センサ114を介して
、X線検出器111が干渉したとして検出する。センサ114は干渉した旨の情報を干渉
回避機能167に出力する。干渉回避機能167は、センサ114からの入力情報を読み
込むと、検出器移動制御機能166から、X線検出器111の移動可能な方向及び範囲に
関する情報を受けとり、図10(b)に示すようにX線検出器111をオペレータと干渉
しない方向、すなわち天板との距離が大きくなる方向へと移動させる。
ペレータと接触しないように自動で移動させることが可能なX線診断装置100を提供す
ることが可能となる。
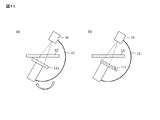
第2の実施形態の変形例では、被検体Pに対してX線検出器111が下側に配置される
APモードでの実施について説明する。APモードにて、X線検出器111が干渉する対
象は、主に天板13である。
、オペレータが操作することでCアーム12が回転動し、天板13の下側に配置されるX
線検出器111が天板13に接近した場合を示している。本変形例でも第2の実施形態と
同様に、センサ114がX線検出器111と天板13が干渉若しくは所定の距離以下に接
近したことを検出すると、図11(b)に示すように、干渉回避機能167はX線検出器
111を移動させて、X線検出器111と天板13の干渉を回避する。
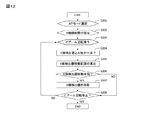
ーチャートである。まず、オペレータによってX線診断装置100の使用モードが決定さ
れる。まず、オペレータによりX線検出装置11が被検体Pに対して下側に配置されるA
Pモードが選択される(ステップS201)。
表示されるX線画像を参照し、入力装置18を介してX線照射範囲を設定し、X線透視を
行う(ステップS202)。
心領域を、角度を変えて観察したい場合、オペレータはCアーム12を回転操作し、X線
照射角を変化させる(ステップS203)。
天板13が干渉した場合、若しくは所定の距離以下に近づいたことを干渉回避機能167
が検出された場合(S204)、その情報を検出器移動制御機能166が受け付けて、X
線検出器111の移動可能な範囲が算出される(ステップS205)。
203にてオペレータによって操作されたCアーム12の回転方向とは反対方向に、干渉
回避機能167によってX線検出器111が移動可能か否か判定される(ステップS20
6)。このとき、X線検出器111が移動可能でない場合は、ステップS208に進み、
オペレータによってCアーム12の回転停止の要否が判定される。X線検出器111が移
動可能な場合は、ステップS207へと進み、処理が継続される。
ると判断された場合は、X線検出器111は天板13と干渉しない方向へと移動される(
ステップS207)。
の回転停止の要否が判定される。Cアーム12の回転が停止されると一連の処理は終了し
、Cアーム12の回転が停止されず、例えば他の角度等にてCアーム12の回転動させる
場合には、ステップS203に戻り、ステップS203以降の処理を継続する(ステップ
S208)。
アーム12の角度を変えて撮像を行うことで、X線検出器111が天板13に干渉若しく
は所定の距離以下に接近した場合に、X線検出器111を自動で天板13と干渉しない方
向へと移動させることが可能となる。
がオペレータ又は天板13と干渉した場合、又はX線検出器111とオペレータ又は天板
13が所定の距離以下に近づいた場合にX線検出器111を移動させるものとして説明し
たが、本実施形態は上記の構成に限定されない。例えば、Cアーム12のX線検出装置1
1とX線発生装置10を結ぶ直線と、床面に対して垂直な面の成す角とが、所定の角度以
上に変化したことをCアーム駆動装置121に備えられたCアーム状態検出器が検出する
と、検出器移動制御機能166がX線検出器111を移動させることにしてもよい。この
とき、検出器移動制御機能166はCアーム状態検出器からCアーム12の角度情報を受
け付け、Cアーム12の角度に応じてX線検出器111の移動量を算出する。
出器111の移動量を算出するものとして説明したが、X線検出器111の移動量を算出
する際には関心領域やX線絞り102の開口領域を用いることにしても良い。このとき、
関心領域やX線絞り102の開口領域の大きさから直接的にX線検出器111の移動量を
算出することはできない。そのため、関心領域やX線絞り102の開口領域の大きさとS
ID値から移動量を算出する必要がある。
表示されるX線透視像はX線検出器111の移動に伴って表示位置が表示装置17の中心
からずれることになる。そのため、X線検出器111が移動した場合に、X線検出器11
1の移動量に応じてX線透視像の表示装置17上での位置を中心にシフトさせることが望
ましい。例えば、X線検出器111をオペレータから見て右奥方向へ移動させた場合には
、表示装置17に表示されるX線透視像は表示装置17の画面右上に中心がずれた表示に
なる。そのため、X線検出器111が移動しても、表示するX線透視像の中心位置は表示
装置17の表示画面の中心にシフト移動させることが望ましい。これにより、X線検出器
111が移動してもオペレータが視認しやすい画面表示を提供することが可能になる。
よって取得されたX線検出器111やオペレータ、表示装置17等の位置情報等を用いて
、X線検出器111を所望の方向へと移動させることが可能となる。これにより、オペレ
ータは、被検体Pの処置中に現状観察しているX線透視像を変化させることなく、手元の
状況を確認することが可能となり、オペレータの処置を補助することが可能なX線診断装
置100提供することが可能になる。
によって実現されるものであっても良いし、ソフトウェアによって実現されるものであっ
ても良いし、ハードウェアとソフトウェアとの組み合わせによって実現されるものであっ
ても良い。
のであり、発明の範囲を限定することを意図していない。これら新規な実施形態は、その
他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の
省略、置き換え、変更を行うことができる。これらの実施形態やその変形は、発明の範囲
や要旨に含まれると共に、特許請求の範囲に記載された発明とその均等の範囲に含まれる
。
1…X線検出装置、111…X線検出器、112…移動操作装置、113…X線検出器移
動装置、114…センサ、12…Cアーム、121…Cアーム駆動装置、13…天板、1
31…天板駆動装置、14…X線絞り駆動装置、15…高電圧発生装置、16…処理回路
、161…システム制御機能、162…駆動制御機能、163…X線制御機能、164…
画像処理機能、165…X線絞り制御機能、166…検出器移動制御機能、167…干渉
回避機能、17…表示装置、18…入力装置、19…記憶回路
Claims (10)
- X線を照射するX線管のX線照射方向と、X線を検出する検出器とが被検体を挟んで互
いに対向するように支持するアームと、
前記X線を所定の大きさの照射範囲に絞るX線絞りと、
前記X線絞りの制御を行うX線絞り制御部と、
前記照射範囲を前記X線絞り制御部から受け付けて、前記検出器の移動量を算出する移
動制御部と、
前記移動制御部が算出した前記移動量に基づいて、前記検出器を検出面に対して平行方
向に移動させる検出器移動部を有するX線診断装置。 - 前記移動制御部が算出する前記検出器の移動範囲は、前記検出器の検出領域内に前記照
射範囲を含む範囲である請求項1に記載のX線診断装置。 - オペレータからの入力情報を受け付ける入力部を更に備え、
前記移動制御部は前記照射範囲と前記入力部からの前記入力情報に基づいて前記検出器
の移動方向及び移動距離を設定する請求項2に記載のX線診断装置。 - 前記入力部は、前記検出器に備えられ、オペレータから前記検出器の移動方向を受け付
けるスイッチにて構成される請求項3に記載のX線診断装置。 - 前記入力部は、前記検出器に備えられ、オペレータからの力を受けた方向に対応して移
動方向を検出するセンサにて構成される請求項3に記載のX線診断装置。 - 前記検出器が検出したX線に基づいて生成されるX線画像を表示する表示装置と、
オペレータと前記表示装置の位置情報を取得するセンサとを更に備え、
前記移動制御部は、前記センサにより取得される前記表示装置と前記オペレータの位置
情報に基づいて前記検出器の移動方向及び距離を算出する請求項2に記載のX線診断装置
。 - 前記検出器の位置情報を取得するセンサを更に備え、
前記移動制御部は、前記センサから前記検出器の位置情報を読み込み、前記アームの回
転動に伴って前記検出器を移動させる請求項2に記載のX線診断装置。 - 被検体を載置するための天板を更に有し、
前記検出器は前記アームの回転動に伴って、前記検出器を前記天板との距離が大きくな
る方向へ移動する請求項7に記載のX線診断装置。 - 前記検出器の位置を記憶する記憶部を更に有し、
前記検出器移動部は、前記検出器の移動後の状態から、前記検出器を移動前の状態に移
動させる請求項2に記載のX線診断装置。 - X線画像を表示するための表示部を更に有し、
前記表示部は、前記検出器が移動した場合に表示するX線画像の表示位置を、前記検出
器の移動量に応じて中心位置に移動させる請求項2に記載のX線診断装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016038004A JP2017153591A (ja) | 2016-02-29 | 2016-02-29 | X線診断装置 |
| US15/441,801 US10898155B2 (en) | 2016-02-29 | 2017-02-24 | X-ray diagnostic apparatus |
| CN201710107972.4A CN107126259B (zh) | 2016-02-29 | 2017-02-27 | X射线诊断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016038004A JP2017153591A (ja) | 2016-02-29 | 2016-02-29 | X線診断装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017153591A true JP2017153591A (ja) | 2017-09-07 |
Family
ID=59679123
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016038004A Pending JP2017153591A (ja) | 2016-02-29 | 2016-02-29 | X線診断装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10898155B2 (ja) |
| JP (1) | JP2017153591A (ja) |
| CN (1) | CN107126259B (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018212068A1 (ja) | 2017-05-19 | 2018-11-22 | エバートロン ホールディングス ピーティーイー リミテッド | 成分制御装置、成分制御方法、輸送方法、調理方法、及びプログラム |
| WO2019132046A1 (ja) | 2017-12-31 | 2019-07-04 | エバートロン ホールディングス ピーティーイー リミテッド | 水分制御装置、水分制御方法、プログラム、記憶媒体、生成された物質、製品、装置及び設備 |
| US11464465B2 (en) | 2019-02-13 | 2022-10-11 | Canon Medical Systems Corporation | X-ray diagnosis apparatus and console |
| US12064275B2 (en) | 2020-12-10 | 2024-08-20 | Canon Medical Systems Corporation | X-ray diagnostic apparatus |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11375962B2 (en) * | 2019-08-05 | 2022-07-05 | Linev Systems, Inc. | Fast foreign object scanner for scanning human bodies |
| US11534120B2 (en) * | 2020-06-15 | 2022-12-27 | Medtronic Navigation, Inc. | Line scanner imaging device, system, and methods |
| CN115499988B (zh) * | 2022-08-15 | 2024-07-19 | 飞瑞医疗器械(嘉兴)有限公司 | X射线照射野范围获取方法、装置、终端及介质 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11285492A (ja) * | 1998-04-03 | 1999-10-19 | Hitachi Medical Corp | X線透視撮影装置および方法 |
| JP2006271970A (ja) * | 2005-03-29 | 2006-10-12 | Siemens Ag | 投影画像の撮影装置 |
| JP2011072582A (ja) * | 2009-09-30 | 2011-04-14 | Shimadzu Corp | X線撮影装置 |
| JP2013240543A (ja) * | 2012-05-23 | 2013-12-05 | Toshiba Corp | X線診断装置 |
| WO2014148309A1 (ja) * | 2013-03-21 | 2014-09-25 | 株式会社 日立メディコ | 移動型x線装置及びその位置決め制御方法 |
| JP2015002938A (ja) * | 2013-06-24 | 2015-01-08 | 株式会社日立メディコ | X線透視撮影装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5348237A (en) | 1976-10-13 | 1978-05-01 | Toyokuni Kk | Petroleum combustion tool |
| US5014292A (en) | 1990-01-29 | 1991-05-07 | Siczek Bernard W | Tiltable x-ray table integrated with carriage for x-ray source and receptor |
| JP2004105568A (ja) * | 2002-09-20 | 2004-04-08 | Toshiba Corp | X線診断装置 |
| JP2007159987A (ja) | 2005-12-16 | 2007-06-28 | Morita Mfg Co Ltd | X線撮影装置 |
| IT1393120B1 (it) * | 2009-03-05 | 2012-04-11 | Gen Medical Merate Spa | Apparecchiatura radiologica |
| JP2011019633A (ja) * | 2009-07-14 | 2011-02-03 | Toshiba Corp | X線診断装置及び被曝線量低減用制御プログラム |
| JP5619535B2 (ja) | 2009-10-23 | 2014-11-05 | 株式会社東芝 | X線診断装置 |
| JP6162421B2 (ja) | 2013-02-12 | 2017-07-12 | 東芝メディカルシステムズ株式会社 | X線可動絞り装置、およびx線診断装置 |
| JP5776807B2 (ja) * | 2014-03-10 | 2015-09-09 | 株式会社島津製作所 | X線撮影装置 |
-
2016
- 2016-02-29 JP JP2016038004A patent/JP2017153591A/ja active Pending
-
2017
- 2017-02-24 US US15/441,801 patent/US10898155B2/en active Active
- 2017-02-27 CN CN201710107972.4A patent/CN107126259B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11285492A (ja) * | 1998-04-03 | 1999-10-19 | Hitachi Medical Corp | X線透視撮影装置および方法 |
| JP2006271970A (ja) * | 2005-03-29 | 2006-10-12 | Siemens Ag | 投影画像の撮影装置 |
| JP2011072582A (ja) * | 2009-09-30 | 2011-04-14 | Shimadzu Corp | X線撮影装置 |
| JP2013240543A (ja) * | 2012-05-23 | 2013-12-05 | Toshiba Corp | X線診断装置 |
| WO2014148309A1 (ja) * | 2013-03-21 | 2014-09-25 | 株式会社 日立メディコ | 移動型x線装置及びその位置決め制御方法 |
| JP2015002938A (ja) * | 2013-06-24 | 2015-01-08 | 株式会社日立メディコ | X線透視撮影装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018212068A1 (ja) | 2017-05-19 | 2018-11-22 | エバートロン ホールディングス ピーティーイー リミテッド | 成分制御装置、成分制御方法、輸送方法、調理方法、及びプログラム |
| WO2019132046A1 (ja) | 2017-12-31 | 2019-07-04 | エバートロン ホールディングス ピーティーイー リミテッド | 水分制御装置、水分制御方法、プログラム、記憶媒体、生成された物質、製品、装置及び設備 |
| EP4327931A2 (en) | 2017-12-31 | 2024-02-28 | Evertron Holdings Pte Ltd. | Moisture control apparatus, moisture control method, program, storage medium, produced object, product, apparatus, and facility |
| US11464465B2 (en) | 2019-02-13 | 2022-10-11 | Canon Medical Systems Corporation | X-ray diagnosis apparatus and console |
| US12064275B2 (en) | 2020-12-10 | 2024-08-20 | Canon Medical Systems Corporation | X-ray diagnostic apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| US10898155B2 (en) | 2021-01-26 |
| CN107126259B (zh) | 2021-02-26 |
| CN107126259A (zh) | 2017-09-05 |
| US20170245826A1 (en) | 2017-08-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017153591A (ja) | X線診断装置 | |
| US8781068B2 (en) | X-ray image diagnosing apparatus | |
| JP5268340B2 (ja) | X線撮影装置及びx線撮影方法 | |
| US10271804B2 (en) | X-ray image diagnosis apparatus | |
| JP4570942B2 (ja) | X線装置およびx線画像データセットの作成方法 | |
| JP6469336B2 (ja) | X線診断装置、及びx線診断装置の制御方法 | |
| JP2014030662A (ja) | X線撮像装置 | |
| JP5550209B2 (ja) | X線撮影装置 | |
| US9161728B2 (en) | X-ray diagnosis apparatus and X-ray diagnosis assisting method | |
| JP6143425B2 (ja) | X線診断装置 | |
| JP2009219552A (ja) | X線診断装置 | |
| JP6512144B2 (ja) | 放射線撮影装置 | |
| JP4599226B2 (ja) | 画像診断装置 | |
| JP2006025893A (ja) | X線画像診断装置 | |
| JP6771875B2 (ja) | 乳房x線撮影装置及び乳房x線撮影方法 | |
| US11241206B2 (en) | X-ray imaging apparatus | |
| JP2009291531A (ja) | X線診断装置 | |
| JPWO2017098626A1 (ja) | 放射線撮影装置 | |
| JP2014023611A (ja) | 放射線撮影装置、制御方法およびプログラム | |
| JP2019122767A (ja) | 医用情報処理装置、x線診断システム及び医用情報処理プログラム | |
| JP2019088380A (ja) | X線診断装置及びアンギオct装置 | |
| WO2013175977A1 (ja) | X線診断装置 | |
| JP2005066037A (ja) | X線ct装置 | |
| JP7002842B2 (ja) | X線診断装置および医用画像診断システム | |
| JP2024129791A (ja) | コンソール装置、x線診断装置、及び照射野の操作方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20160519 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20160520 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20160929 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20161021 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191029 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191030 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200303 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200507 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200707 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201007 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20201007 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20201016 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20201020 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20201106 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20201110 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20201208 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20210224 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20210330 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20210330 |