JP3712876B2 - 電動式パワーステアリング制御装置 - Google Patents
電動式パワーステアリング制御装置 Download PDFInfo
- Publication number
- JP3712876B2 JP3712876B2 JP34195698A JP34195698A JP3712876B2 JP 3712876 B2 JP3712876 B2 JP 3712876B2 JP 34195698 A JP34195698 A JP 34195698A JP 34195698 A JP34195698 A JP 34195698A JP 3712876 B2 JP3712876 B2 JP 3712876B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- motor
- torque
- current
- rotational speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0472—Controlling the motor for damping vibrations
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
- Control Of Electric Motors In General (AREA)
Description
【発明の属する技術分野】
本発明は、モータにより操舵力を補助する電動式パワーステアリング制御装置に関するものである。
【0002】
【従来の技術】
図16は、例えば、三菱電機技報Vol.70 No.9 P43〜P48に記載された従来の電動式パワーステアリング制御装置の構成を示すブロック図である。同図において、1は運転者が操舵した場合の操舵トルクを検出するトルクセンサ、2は上記トルクセンサ1の出力信号の周波数特性を改善する位相補償器、3は位相補償されたトルクセンサ1の出力に基づいて上記操舵トルクを補助するための補助トルク電流を演算するトルク制御器、4は例えば図示しないモータ角速度算出手段手段で算出されたモータ8の回転角速度ωMに基づいてダンピング電流を演算するダンピング制御器、5はモータ8の摩擦トルクを補償する摩擦補償電流を演算する摩擦補償器5aとモータ8の慣性モーメントを補償する慣性補償電流を演算する慣性補償器5bより構成され、上記ωMに基づいて上記摩擦補償電流を演算するとともに、上記ωMを微分した回転角加速度(dωM/dt)に基づいて上記慣性補償電流を演算する補償制御器、6は上記トルク制御器3で演算された補助トルク電流、ダンピング制御器4で演算されたダンピング電流、補償制御器5で演算された摩擦補償電流及び慣性補償電流とを加算して目標電流を算出する加算器である。また、7は上記加算器6で演算された目標電流と、電流検出器9から出力されるモータ8の駆動電流と比較し、上記駆動電流が上記目標電流に一致するように電流制御を行う電流制御器である。
【0003】
次に、従来の電動式パワーステアリング制御装置の動作について説明する。
自動車の運転者がハンドルを操舵すると、その時の操舵トルクはトルクセンサ1で測定され、位相補償器2で位相補償され周波数特性を改善された後、トルク制御器3に入力される。トルク制御器3では、周波数特性を改善されたトルクセンサ1の出力信号にほぼ比例する補助トルク電流を演算し、上記補助トルク電流に基づいてモータ8を駆動して運転者の操舵トルクをアシストし、運転者による操舵トルクを軽減する。
このとき、ハンドルの動きを安定化させるために、ダンピング制御器4でモータ回転角速度ωMに比例したダンピング電流を演算して上記補助トルク電流に加える。また、モータ8の摩擦の影響を補償するために、摩擦補償制御器5aでモータ回転角速度ωMの符号に応じて変化する摩擦補償電流を加え、更に、モータ8の慣性モーメントの影響を補償するため、慣性補償制御器5bでモータ回転角速度ωMを微分して得たモータ回転角加速度(dωM/dt)に比例した慣性補償電流を加えている。これらの補償電流を上記補助トルク電流に加算して目標電流を演算し、電流制御器7により、上記目標電流に基づいてモータ8に通電する駆動電流を制御することにより、上記駆動電流に比例したアシストトルクを発生させ、運転者による操舵トルクを軽減させるとともに、ハンドルの動きを安定化させることができる。なお、上記各制御器3,4,5は、ともに車速に応じて制御パラメータを変更している。
【0004】
【発明が解決しようとする課題】
ところで、トルク制御器3で演算された補助トルク電流は、位相補償器2で周波数特性を改善されたトルクセンサ1の出力信号にぼぼ比例した値となるが、この時、上記トルク制御器3で設定されたトルク比例ゲインが大きいほどアシストトルクが大きくなり運転者の操舵トルクを軽減できる。しかしながら、上記トルク比例ゲインを大きくすると、制御系の発振が生じ運転者が不快なトルク振動を感じてしまうので、上記トルク比例ゲインを単純に大きくすることはできない。上記発振を防止する方法としては、ダンピング電流を大きくする方法が考えられるが、従来の技術では、ダンピング電流を大きくするような補償を行うと、このダンピング補償がハンドルを回す際の抵抗として作用し、操舵トルクが大きくなってしまうので、大きなダンピング電流を加えることができなかった。したがって、トルク比例ゲインを大きくすることができず、特に据え切り等の大きなアシストトルクが必要な場合には、運転者の操舵トルクを十分に軽減することができないという問題点があった。
【0005】
この発明は、上記問題点を解決するためになされたもので、運転者に不快なトルク振動を感じさせることなく操舵トルクを軽減することができる電動式パワーステアリング制御装置を提供することを目的とする。
【0012】
【課題を解決するための手段】
本願の請求項1に記載の発明は、運転者による操舵トルクを検出する操舵トルク検出手段と、上記検出された操舵トルク信号に基づいて上記操舵トルクを補助する補助トルク電流を演算するトルク制御器と、上記操舵トルクを補助するトルクを発生するモータと、上記モータの回転速度を推定する回転速度推定手段と、上記推定されたモータ回転速度の推定値を用いて、上記補助トルク電流に加算されるダンピング電流を演算するダンピング制御器とを備えた電動式パワーステアリング制御装置であって、上記回転速度推定手段が、モータ回転角の検出値から操舵による成分を除去するモータ回転角用操舵成分除去手段と、モータに通電される電流の検出値もしくは指令値から操舵による成分を除去するモータ電流用操舵成分除去手段と、モータの慣性モーメントを慣性項,トルクセンサの剛性をバネ項とする振動方程式に対して構成され、上記モータ回転角用操舵成分除去手段及び上記モータ電流用操舵成分除去手段から出力される、操舵成分が除去されたモータ回転角とモータ電流とに基づいてモータ回転速度の推定値を演算する回転速度オブザーバとを備え、上記回転速度オブザーバで演算された操舵による速度成分を除去したモータの回転速度推定値に基づいてダンピング電流を演算するようにしたものである。
【0013】
請求項2に記載の発明は、運転者による操舵トルクを検出する操舵トルク検出手段と、上記検出された操舵トルク信号に基づいて上記操舵トルクを補助する補助トルク電流を演算するトルク制御器と、上記操舵トルクを補助するトルクを発生するモータと、上記モータの回転速度を推定する回転速度推定手段と、上記推定されたモータ回転速度の推定値を用いて、上記補助トルク電流に加算されるダンピング電流を演算するダンピング制御器とを備えた電動式パワーステアリング制御装置であって、上記回転速度推定手段が、モータに通電される電流の検出値もしくは指令値から操舵による成分を除去するモータ電流用操舵成分除去手段と、操舵トルク検出手段の出力から操舵による成分を除去する操舵トルク用操舵成分除去手段と、モータの慣性モーメントを慣性項,トルクセンサの剛性をバネ項とする振動方程式に対して構成され、上記モータ電流用操舵成分除去手段及び上記操舵トルク用操舵成分除去手段から出力される、操舵成分が除去されたモータ電流と操舵トルクとに基づいてモータ回転速度の推定値を演算する回転速度オブザーバとを備え、上記回転速度オブザーバで演算された操舵による速度成分を除去したモータの回転速度推定値に基づいてダンピング電流を演算するようにしたものである。
【0014】
また、請求項3に記載の発明は、請求項1または請求項2に記載の電動式パワーステアリング制御装置において、車速検出手段を設け、車速に応じて、上記各操舵成分除去手段のいずれかあるいは全部で除去する周波数帯域を可変としたものである。なお、この時、制御系の各パラメータも同様に車速に応じて可変とすることが望ましい。
【0015】
【発明の実施の形態】
以下、本発明の実施の形態について、図面に基づき説明する。
実施の形態1.
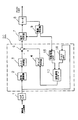
図1は、本発明の実施の形態1に係わる電動式パワーステアリング制御装置の構成を示すブロック図である。同図において、1は運転者が操舵した場合の操舵トルクを検出するトルクセンサ、2は上記トルクセンサ1の出力信号を位相補償してその周波数特性を改善する位相補償器、3は位相補償されたトルクセンサ1の出力に基づいて上記操舵トルクを補助する補助トルク電流を演算するトルク制御器、11は例えばタコゼネレータ等のモータ回転速度センサ10から出力されたモータ回転速度信号を周波数分離し、上記モータ回転速度信号から操舵周波数成分を除去する操舵成分除去手段である回転速度ハイパスフィルタ(以下、回転速度HPFという)、4は上記回転速度HPF11の出力に基づいて操舵の減衰特性を制御するためのダンピング電流を演算するダンピング制御器、6はトルク制御器3で演算された補助トルク電流、ダンピング制御器4で演算されたダンピング電流とを加算し目標電流を演算する加算器である。また、7は電流制御器であり、アシストトルクを発生すべく、電流検出器9で検出したモータ8に通電される駆動電流検出値が上記目標電流に一致するように、モータ8の端子に印加する駆動電圧指令値を設定して、例えばPWM信号として出力する。
本発明では、図1のブロック図中の一点鎖線で囲まれた位相補償器2や回転速度HPF11等から成る目標電流演算手段20をマイコンのソフトウエアのみで構成しても従来の技術の課題を解決することが可能である。以下では、上記目標電流演算手段20をマイコンのソフトウエアのみで構成した場合について説明する。なお、上記目標電流演算手段20は、各構成要素のそれぞれかあるいは各構成要素に共通した図示しないRAMやROM等のメモリを有し、所定の制御サンプリング時間毎にトルクセンサ1の検出値等のデータを取り込んでA/D変換し、RAM等のデータ書き込み用メモリに記憶する。
【0016】
ここで、上記操舵成分除去手段である回転速度HPF11について説明する。一般に運転者が操舵可能な周波数は3Hz程度以下である。また、例えばレーンチェンジ時の操舵周波数は、0.2Hz付近であり、通常はこのような低周波の操舵を行うケースが多い。これに対し、ステアリング発振を生じやすい周波数帯域は30Hz以上であり、操舵周波数との周波数分離が可能である。したがって、操舵成分除去手段を、推定或いは測定されたモータ回転速度を周波数分離し、モータ回転速度から操舵周波数成分を取り除く周波数分離器で構成することにより、モータの回転速度の操舵成分を除去することができる。
一般に低周波成分を除去したい場合には、周波数分離器としてハイパスフィルタが用いられる。モータ回転速度センサ10から出力されるモータ8の回転速度をハイパスフィルタに通すことにより、低周波成分である操舵による成分を除去することができる。このとき、ハイパスフィルタの折点周波数を低く設定すれば操舵による成分が残り易くなり、高く設定すれば、ハイパスフィルタを通して得られたモータ回転速度のステアリング発振成分の位相ずれが大きくなるので、通常行われる操舵周波数からステアリング発振を生ずる周波数の範囲内のいずれかの周波数にハイパスフィルタの折点周波数を設定しておけば、モータ回転速度のステアリング発振成分を残して操舵周波数成分を除去することが可能である。そこで、本実施の形態1では、回転速度HPF11として、一般の運転者が操舵可能な最大周波数を狙って、折点周波数が0.2〜30Hzの範囲に設定したハイパスフィルタを用い、モータの回転速度成分を適正に除去するようにしている。
【0017】
次に、上記構成の電動式パワーステアリング制御装置の動作について、図2のフローチャートに基づいて説明する。なお、本発明の従来の技術と異なる点は、電流制御器7に出力される目標電流の演算方法、すなわち、図1の目標電流演算手段20によって目標電流を演算するまでのアルゴリズムであり、モータ8に通電する駆動電流の制御に関しては、PID式の電流F/B制御あるいは目標電流とモータ回転信号とに基づくオープンループ制御等の一般的に行われる制御を、ディジタル制御あるいはアナログ制御のいずれかの方式に基づいて実施しても良い。したがって、以下では、目標電流演算手段20におけるモータ8の目標電流を演算するまでのアルゴリズムに限定して説明を行う。
まず、ステップS101で、トルクセンサ1からのトルクセンサ出力をマイコンに読み込みメモリに記憶し、ステップS102で、モータ回転速度センサ10からのモータ回転速度信号を読み込みメモリに記憶する。次に、ステップS103において、位相補償器2により、上記メモリに記憶されたトルクセンサ出力を読み込み位相補償演算を行い、位相補償器出力としてメモリに記憶する。ステップS104では、トルク制御器3により、上記メモリに記憶された位相補償器出力を読み込み、補助トルク電流をマップ演算しメモリに記憶する。
ステップS105では、回転速度HPF11において、上記メモリに記憶されたモータ回転速度信号を読み込みハイパスフィルタの演算を行い、回転速度HPF出力としてメモリに記憶し、ステップS106において、ダンピング制御器4により、上記メモリに記憶された回転速度HPF出力を読み込み、制御ゲインを乗じてダンピング電流を演算しメモリに記憶する。
ステップS107では、加算器6において、上記メモリに記憶された補助トルク電流とダンピング電流とを加算し、目標電流としてメモリに記憶する。
上記ステップS101からS107までの動作を、制御サンプリング毎に繰り返し、位相補償されたトルクセンサ出力と操舵周波数成分を除去されたモータ回転速度信号とからモータ8の目標電流を演算する。
なお、上記ステップS104で使用したトルクセンサ出力と補助トルク電流の関係を示すマップや、上記ステップS106で使用したダンピング電流を演算するための制御ゲインなどの目標電流の演算を行う際に必要なマップや比例係数等の定数は予めROMに設定しておくものとする。
【0018】
なお、上記実施の形態1では、補助トルク電流をマップ演算で求め、ダンピング電流をゲインを乗じる演算によっで求める構成としたが、補助トルク電流及びダンピング電流をともに、マップ演算あるいはゲインを乗じる演算の何れかの演算方法によって求めてもよい。
また、上記例では、位相補償器2をディジタルで構成したが、アナログで構成してもよい。あるいは、位相補償器2をアナログとディジタルとを組み合わせた複数段の位相補償器としてもよい。この場合、上記ステップS101は、トルクセンサ1の出力ではなく、トルクセンサ1の出力を位相補償したアナログの位相補償器の出力を読み込んでメモリに記憶する動作を行うことになるので、位相補償器2をアナログのみで構成する場合には、上記ステップS103の演算が不要となる。
また、上記例では、例えばタコゼネレータ等のモータ回転速度センサ10によってモータ回転速度を検出する構成としたが、例えばロータリーエンコーダ等を用いてモータ回転角信号を検出し、このモータ回転角信号を差分処理してモータ回転速度を求めるようにしてもよい。
【0019】
更に、上記実施の形態1では、トルク制御器3の出力とダンピング制御器4の出力とから目標電流を求める構成としたが、従来例と同様、摩擦補償制御器5a及び慣性補償制御器5bとを備えた補償制御器5を付加し、摩擦補償制御器出力や慣性補償制御器出力を更に加えて目標電流を求めるような構成としてもよいことはいうまでもない。
【0020】
このように、本実施の形態1においては、モータ回転速度センサ10により検出したモータ回転速度信号を回転速度HPF11を用いて操舵周波数成分を除去した後、ダンピング制御器4において、上記操舵周波数成分を除去された回転速度HPF出力に基づいてダンピング電流を演算するような構成としたので、トルク比例ゲインを大きくしても制御系の発振を防止することができる。したがって、ダンピング制御器4のダンピング制御ゲインを大きくしてダンピングを強く効かせることができるので、ハンドルの振動を運転者が感じることなく、操舵トルクを低減することができる。
【0021】
実施の形態2.
図3は、本発明の実施の形態2に係わる電動式パワーステアリング制御装置の構成を示すブロック図である。上記実施の形態1では、回転速度HPF11を設け、モータ回転速度センサ10からのモータ回転速度信号から操舵周波数成分を除去した回転速度HPF出力に基づいてダンピング電流を演算するようにしたが、本実施の形態2は、図3に示すように、モータ回転速度センサ10を省略するとともに、モータの8端子間電圧を検出する端子間電圧検出器12と、上記端子間電圧検出器12で検出された端子間電圧検出値と、電流検出器9で検出された駆動電流検出値とに基づいてモータ8の回転速度を推定する回転速度推定器13とを設けてモータ回転速度を推定するとともに、上記回転速度推定器13から出力されるモータ回転速度推定信号を回転速度HPF11に入力して上記モータ回転速度推定信号から操舵周波数成分を除去するように構成し、ダンピング制御器4において、上記操舵周波数成分を除去された回転速度HPF出力に基づいてダンピング電流を演算するようにしたものである。
【0022】
次に、上記構成の電動式パワーステアリング制御装置の動作について、図4のフローチャートに基づいて説明する。なお、本実施の形態2についても上記実施の形態1と同様に、目標電流演算手段20により目標電流を演算するまでのアルゴリズムに限定して説明を行う。
まず、ステップS201で、トルクセンサ1からのトルクセンサ出力を読み込みメモリに記憶し、ステップS202で、電流検出器9からの駆動電流検出値を読み込み、ステップS203で端子間電圧検出器12からの端子間電圧検出値を読み込んで、それぞれメモリに記憶する。ステップS204では、位相補償器2により、メモリに記憶されたトルクセンサ出力を読み込み位相補償演算を行い、位相補償器出力としてメモリに記憶する。ステップS205では、トルク制御器3により、メモリに記憶された位相補償器出力を読み込み、補助トルク電流をマップ演算しメモリに記憶する。
ステップS206では、回転速度推定器13で、上記メモリに記憶された駆動電流検出値(Isns)と端子間電圧検出値(Vt_sns)とを読み込み、以下の(1)式によりモータ回転速度推定信号(ωest_bk)を演算しメモリに記憶する。
ωest_bk=(Vt_sns− Vcomp−Isns×Rac)/Kec ‥‥(1)
上記式(1)において、Vcompは、モータ8の端子間電圧Vtに対するコイルへの印加電圧Vaの電圧降下分Vdropに相当する補償値で、Racはコイル抵抗相当値、Kecは逆起電圧定数相当値である。なお、上記モータ回転速度推定信号ωest_bkの算出方法の詳細については、別途説明する。
次に、ステップS207で、回転速度HPF11により、メモリに記憶された上記モータ回転速度推定信号ωest_bkを読み込んでハイパスフィルタの演算を行い、回転速度HPF出力としてメモリに記憶し、ステップS208では、ダンピング制御器4により、メモリに記憶された回転速度HPF出力を読み込み、制御ゲインを乗じてダンピング電流を演算する。ステップS209では、加算器6において、上記メモリに記憶された補助トルク電流とダンピング電流とを加算し、目標電流としてメモリに記憶する。
上記ステップS201からS209までの動作を、制御サンプリング毎に繰り返し、位相補償されたトルクセンサ出力と操舵周波数成分を除去されたモータ回転速度推定信号とからモータ8の目標電流を演算する。
【0023】
ここで、モータ回転速度推定信号ωest_bkの算出方法の詳細について説明する。
モータの逆起電圧Veは、以下の(2)式のように、既知の逆起電圧定数Keとモータ回転速度ωとの積で表される。
Ve=Ke・ω ‥‥(2)
そこで、モータの逆起電圧Veを推定することにより、上記(2)式から、ω=Ve/Keによりモータ回転速度ωを推定したモータ回転速度推定信号ωest_bkを求めることができる。
ところで、逆起電圧Veは、以下の(3)式に示すように、コイルへの印加電圧Vaとコイルでの電圧降下Vcとから演算が可能である。
Ve=Va−Vc ‥‥(3)
また、コイルでの電圧降下Vcは、既知のコイル抵抗値Raとコイルインダクタンス値Laとモータ電流Iaとから以下の(4)式により求められる。
Vc=Ra・Ia+La・(dIa/dt) ‥‥(4)
上記(4)式中、右辺第2項は、インダクタンスの影響を表すものであるが、高周波数領域以外では影響が小さいこと、また、電流検出値を微分することにより得られる信号にはノイズが重畳し易いことから、上記コイルでの電圧降下Vcを、以下の(5)式のように、上記第2項を無視して表す場合も良く見られる。
Vc≒Ra・Ia‥‥(5)
ところで、コイルへの印加電圧Vaは直接測定できないが、モータ端子間電圧Vtとコイルへの印加電圧Vaとの間には、以下の(6)式の関係があるので、予め上記Vtから上記Vaまでの電圧降下分Vdropの特性を把握しておくことにより、コイルへの印加電圧Vaの値を推定することができる。
Va=Vt−Vdrop‥‥(6)
したがって、モータの逆起電圧Veは、(3),(5),(6)式から、

以下にモータ回転速度推定信号ωest_bkの演算式((1)式)を再掲する。
ωest_bk=(Vt_sns− Vcomp−Isns×Rac)/Kec ‥‥(1)
上記(1)式は、上記(2),(3)式及び(5),(6)式で表される物理式をソフトウエア上に記述したものであり、Rac,Kecの各パラメータは、予めROMに記憶しておく。また、上記電圧降下分Vdrop は電流値に依存する性質があるので上記Vcompは、駆動電流検出値Isnsに対するマップとして予めROMに記憶させておく。また、上記Vdropが十分小さい場合は上記補償値Vcompを0として取り扱ってもよい。
【0024】
このように、本実施の形態2では、端子間電圧検出器12で検出された端子間電圧検出値Vt_snsと、電流検出器9で検出された駆動電流検出値Isnsとに基づいてモータ8の回転速度を推定する回転速度推定器13を設けてモータ回転速度推定信号ωest_bkを演算するとともに、このモータ回転速度推定信号ωest_bkを回転速度HPF11に入力して操舵周波数成分を除去した回転速度HPF出力に基づいてダンピング電流を演算するようにしたので、高価なモータ回転速度センサ10が不要となり、電動式パワーステアリング装置の低コスト化を図ることができる。
【0025】
実施の形態3.
図5は、本発明の実施の形態3に係わる電動式パワーステアリング制御装置の構成を示すブロック図である。上記実施の形態2では、モータの端子間電圧検出値Vt_snsと駆動電流検出値Isnsとからモータ回転速度を推定する回転速度推定器13によりモータ回転速度を推定してモータ回転速度推定信号ωest_bkを求めるようにしたが、本実施の形態3は、図5に示すように、電流制御器7からの目標電流及び端子間電圧指令値に基づいて、モータ8の回転速度を推定する回転速度推定器13を設けてモータ回転速度推定信号ωest_bkを演算するとともに、このモータ回転速度推定信号ωest_bkを上記回転速度HPF11に入力して操舵周波数成分を除去した回転速度HPF出力に基づいてダンピング電流を演算するようにしたものである。なお、上記目標電流及び端子間電圧指令値は、コントローラ(電流制御器7)が設定する設定値である。また、上記電流制御器7からの目標電流はモータ8に通電する電流値を指すものとする。
【0026】
次に、上記構成の電動式パワーステアリング制御装置の動作について、図6のフローチャートに基づき、目標電流を演算するまでのアルゴリズムに限定して説明する。
まず、ステップS301で、トルクセンサ出力を読み込みメモリに記憶し、ステップS302で、位相補償器2により、上記メモリに記憶されたトルクセンサ出力を読み込み位相補償演算を行い、位相補償器出力としてメモリに記憶する。ステップS303では、トルク制御器3により、メモリに記憶された位相補償器出力を読み込み、補助トルク電流をマップ演算しメモリに記憶する。
ステップS304は、回転速度推定器13により、加算器6で演算されメモリに記憶されている駆動電流検出値Irefと、電流制御器7で演算しメモリに記憶されている駆動電圧指令値Vt_indとを読み込み、以下の(7)式によりモータ回転速度推定信号ωest_bkを演算しメモリに記憶する。
ωest_bk=(Vt_ind −Vcomp−Vcomp2−Iref×Rac)/Kec‥‥(7)
なお、上記Vcomp2は、駆動電圧指令値からモータの端子間電圧までの電圧降下(Vt_ind−Vt)に相当する補償値で、上記電圧降下は、電流値に依存する性質が有るので上記Vcomp2は、駆動電流検出値Isnsに対するマップとして、予めROMに記憶させておく。また、駆動電圧指令値から端子間電圧までの電圧降下が十分小さい場合は上記Vcomp2を0として取り扱ってもよい。
【0027】
次に、ステップS305で、回転速度HPF11により、メモリに記憶された上記モータ回転速度推定信号ωest_bkを読み込んでハイパスフィルタの演算を行い、回転速度HPF出力としてメモリに記憶する。ステップS306では、ダンピング制御器4により、メモリに記憶された回転速度HPF出力を読み込み、制御ゲインを乗じてダンピング電流を演算する。ステップS307では、加算器6において、上記メモリに記憶された補助トルク電流とダンピング電流とを加算し、目標電流としてメモリに記憶する。
上記ステップS301からS307までの動作を、制御サンプリング毎に繰り返し、位相補償されたトルクセンサ出力と操舵周波数成分を除去されたモータ回転速度信号とからモータ8の目標電流を演算する。
【0028】
このように、本実施の形態3では、コントローラが設定する設定値である駆動電圧指令値Vt_indと目標電流Irefとからモータ回転速度推定信号ωest_bkを推定する回転速度推定器13を設けるとともに、回転速度HPF11により操舵周波数成分を除去したモータ回転速度推定信号ωest_bkである回転速度HPF出力に基づいてダンピング電流を演算するようにしたので、駆動電流や端子電圧等を検出する際のノイズの影響を受けることがなく、ダンピング電流を精度良く求めることができる。
【0029】
なお、上記実施の形態3では、モータに印加する電圧,通電する電流値はともにコントローラ(電流制御器7)が設定する指令値や目標値を用いたが、何れか一方を測定した検出値としてもよい。
【0030】
実施の形態4.
次に、本発明の実施の形態4について説明する。
本実施の形態4は、上記実施の形態2における回転速度推定器13でのモータ回転速度推定信号(ωest_bk)を演算する演算アルゴリズムのみを変更し、コイルのインダクタンス特性を考慮したモータ回転速度推定信号(ωest_bk)を演算し、ステアリング振動が高周波で発生する際にも、正確にモータ8の回転速度の振動周波数成分を推定できるようにしたものである。なお、本実施の形態4の電動式パワーステアリング制御装置の構成は、上記図3に示したブロック図と同一である。
【0031】
次に、目標電流を演算するまでのアルゴリズムについてのみ、図7のフローチャートを用いて説明する。
まず、ステップS401でトルクセンサ出力を読み込みメモリに記憶し、ステップS402で駆動電流検出値を読み込み、ステップS403で端子間電圧検出値を読み込み、それぞれメモリに記憶する。ステップS404では、位相補償器2により、メモリに記憶されたトルクセンサ出力を読み込み位相補償演算を行い、位相補償器出力としてメモリに記憶する。ステップS405では、トルク制御器3により、メモリに記憶された位相補償器出力を読み込み、補助トルク電流をマップ演算しメモリに記憶する。
【0032】
ステップS406及びS407は、回転速度推定器13における動作を表すもので、ステップS406では、メモリに記憶された駆動電流検出値Isnsと端子間電圧検出値Vt_snsとを読み込み、以下の(8)式のように、現サンプリングの駆動電流検出値Isns(k)と前サンプリング時の駆動電流検出値Isns(k-1)との差分を求め、駆動電流検出値(Isns)の微分値(dIsns)を演算する。
dIsns(k)={Isns(k)−Isns (k-1)}/Tsamp‥‥(8)
k:制御サンプリング回数
Tsamp:制御サンプリング時間
次に、ステップS407で、コイル電流からコイルインピーダンスの逆特性に相当するコイル電圧を得るための逆特性演算手段を用いて、駆動電流検出値Isnsと上記(8)式により求められたdIsns(k) とによりコイルでの電圧降下Vcを求めた後、以下の(9)式によりモータ回転速度推定信号(ωest_bk)を演算しメモリに記憶する。
【0033】
次に、ステップS408で、回転速度HPF11により、メモリに記憶された上記モータ回転速度推定信号ωest_bkを読み込んでハイパスフィルタの演算を行い、回転速度HPF出力としてメモリに記憶し、ステップS409で、ダンピング制御器4により、メモリに記憶された回転速度HPF出力を読み込み、制御ゲインを乗じてダンピング電流を演算する。ステップS410では、加算器6において、上記メモリに記憶された補助トルク電流とダンピング電流とを加算し、目標電流としてメモリに記憶する。
上記ステップS401からS410までの動作を、制御サンプリング毎に繰り返し、位相補償されたトルクセンサ出力と操舵周波数成分を除去されたモータ回転速度推定信号とからモータ8の目標電流を演算する。
なお、モータ回転速度推定信号ωest_bkを演算する(9)式は、上記(2)〜(4)式及び(6)式の物理式をソフトウエア上に記述したものであり、上記コイルインダクタンス相当値Lacは、Rac,Kecと同様に予めROMに記憶しておく。
【0034】
このように、本実施の形態4は、モータ回転速度をモータ8の端子間電圧検出値と駆動電流検出値からコイルでの電圧降下相当値を求めてモータ回転速度を推定する際に、コイルのインダクタンス特性を考慮するように構成したので、ステアリング振動が高周波で発生する際にも、モータ8の回転速度の振動周波数成分を正確に推定することができる。
【0035】
なお、上記実施の形態4では、駆動電流検出値(Isns)と端子間電圧検出値(Vt_sns)を用いてモータ回転速度推定信号(ωest_bk)を演算する構成としたが、実施の形態3と同様に、モータ8に印加する電圧値,モータ8に通電する電流値の一方もしくは両方を、駆動電圧指令値,目標電流としてモータ回転速度推定信号(ωest_bk)を演算するようにしてもよい。
【0036】
実施の形態5.
次に、本発明の実施の形態5について説明する。
実施の形態5は、実施の形態2における回転速度推定器13でのモータ回転速度推定信号(ωest_bk)を演算する演算アルゴリズムのみを変更し、モータ回転速度をモータ8の端子間電圧検出値と駆動電流検出値から推定する際に、コイルのインダクタンス特性を考慮するとともに、コイルでの電圧降下相当値を求める逆特性演算手段のゲイン及び位相を、コイルインピーダンスの逆特性と、操舵時にステアリング発振が発生する周波数でのみ一致するような周波数特性を有するようにし、ステアリング振動が発生する周波数でのみ正確にモータの回転速度を推定するようにしたものである。なお、本実施の形態4の電動式パワーステアリング制御装置の構成は、上記図3に示したブロック図と同一である。
【0037】
以下に、目標電流を演算するまでのアルゴリズムについてのみ、図8のフローチャートを用いて説明する。
まず、ステップS501で、トルクセンサ出力を読み込みメモリに記憶し、ステップS502で、駆動電流検出値を読み込み、ステップS503で端子間電圧検出値を読み込み、それぞれメモリに記憶する。ステップS504では、位相補償器2により、メモリに記憶されたトルクセンサ出力を読み込み位相補償演算を行い、位相補償器出力としてメモリに記憶する。ステップS505では、トルク制御器3により、メモリに記憶された位相補償器出力を読み込み、補助トルク電流をマップ演算しメモリに記憶する。
【0038】
ステップS506、S507は回転速度推定器13における動作を表すもので、ステップS506では、メモリに記憶された駆動電流検出値(Isns)と端子間電圧検出値(Vt_sns)を読み込み、以下の(10)式のように、駆動電流検出値(Isns)をフィルタ処理して、コイルでの電圧降下相当値Vc_estの演算を行う。
G(s)=Gcomp3・{(Tcomp1・S+1)/(Tcomp2・S+1)}‥‥(11)
上記(11)式のフィルタは、図9のボード線図に示されるように、ステアリング振動を生じる周波数で、実際のコイルの逆特性とゲインと位相が一致するように、各パラメータTcomp1,Tcomp2,Gcomp3を設定する。
次に、ステップS507で、上記(10)式により求められたVc_est(k)を用いて、以下の(12)式によりモータ回転速度推定信号ωest_bkを演算しメモリに記憶する。
ωest_bk=(Vt_sns−Vcomp−Vc_est)/Kec ‥‥(12)
【0039】
次に、ステップS508で、回転速度HPF11により、メモリに記憶された上記モータ回転速度推定信号ωest_bkを読み込んでハイパスフィルタの演算を行い、回転速度HPF出力としてメモリに記憶する。ステップS509では、ダンピング制御器4により、メモリに記憶された回転速度HPF出力を読み込み、制御ゲインを乗じてダンピング電流を演算する。ステップS510では、加算器6において、上記メモリに記憶された補助トルク電流とダンピング電流とを加算し、目標電流としてメモリに記憶する。
上記ステップS501からS510までの動作を、制御サンプリング毎に繰り返し、位相補償されたトルクセンサ出力と操舵周波数成分を除去されたモータ回転速度推定信号とからモータ8の目標電流を演算する。
【0040】
このように、本実施の形態5では、モータ回転速度をモータ8の端子間電圧検出値と駆動電流検出値から推定する際に、コイルのインダクタンス特性を考慮するとともに、ステアリング振動が発生する周波数でのみ正確にモータの回転速度を推定する構成としたことにより、単にインダクタンス逆特性を演算してモータの回転速度を推定する場合よりも、高周波領域でのゲインを低下させることができるので、高周波数のノイズの影響を小さくすることができる。
また、モータに通電される電流の検出値もしくは指令値を、操舵時にステアリング発振が発生する周波数でのみコイルインピーダンスの逆特性とゲインと位相が一致するようにしたことにより、ステアリング発振が発生する周波数以外は、フィルタのゲイン,位相を自由に変えられるので、ダンピングを効かせたい周波数ではモータ回転速度を正確に推定することができる。
【0041】
実施の形態6.
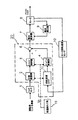
図10は、本発明の実施の形態6に係わる電動式パワーステアリング制御装置の構成を示すブロック図である。同図において、1は運転者が操舵した場合の操舵トルクを検出するトルクセンサ、2は上記トルクセンサ1の出力信号を位相補償してその周波数特性を改善する位相補償器、3は位相補償されたトルクセンサ1の出力に基づいて上記操舵トルクを補助するトルクを発生するモータ8に通電する補助トルク電流を演算するトルク制御器である。
また、15は電流検出器9で検出された駆動電流検出値から操舵周波数成分を除去する駆動電流HPF、16はモータ3の回転角を検出する回転角検出器14で検出された回転角検出値から操舵周波数成分を除去するモータ角度HPF、17はモータの慣性モーメントを慣性項,トルクセンサの剛性をバネ項とする振動方程式に対して構成され、上記駆動電流HPF15から出力とモータ角度HPF16からの出力とに基づいてモータ回転速度を推定しモータ回転速度推信号である回転速度オブザーバ出力を出力する回転速度オブザーバ、4は上記回転速度オブザーバ出力に基づいてダンピング電流を演算するダンピング制御器、6は上記トルク制御器3で演算された補助トルク電流、ダンピング制御器4で演算されたダンピング電流を加算し目標電流を算出する加算器である。また、7は電流制御器であり、アシストトルクを発生すべく、電流検出器9で検出したモータ8に通電される駆動電流検出値が上記目標電流に一致するように、モータ8の端子に印加する駆動電圧指令値を設定して、例えばPWM信号として出力する。
【0042】
ここで、上記回転速度オブザーバ17について説明する。
ステアリングの機構は、運転者がハンドルを動かすことによって入力される操舵トルク,モータが発生するアシストトルク及びタイヤからの反力を中心とする反力トルクの釣り合いで表される。一方、ステアリング振動は一般に30Hz以上の速い周波数で発生する。この速い周波数では、ハンドル角の変動や路面反力変動は無視できるほど小さくなるので、モータをバネ特性を有するトルクセンサに支えられた振動系とみなすことができる。したがって、これに相当する運動方程式、例えばモータの慣性モーメントを慣性項,トルクセンサの剛性をバネ項とする振動方程式に基づいて回転速度オブザーバを構成すれば、コイル電流からコイルでの電圧降下を求めるときに必要な微分器を用いることなく、操舵周波数を越える周波数帯域でのモータの回転速度を推定することができる。
なお、上記駆動電流HPF15及びモータ角度HPF16の折点周波数は、上述した回転速度HPF11と同様に、一般の運転者が操舵可能な最大周波数を狙って、0.2〜30Hzの範囲に設定したハイパスフィルタとしたので、モータの回転速度の操舵周波数成分を適正に除去することができる。
【0043】
次に、上記構成の電動式パワーステアリング制御装置の動作について図11のフローチャートに基づいて説明する。なお、本実施の形態6においても、上記各実施の形態1〜5と同様に、目標電流演算手段20における目標電流を演算するまでのアルゴリズムを説明する。
まず、ステップS601で、トルクセンサ出力を読み込みメモリに記憶し、ステップS602で、駆動電流検出値を読み込み、ステップS603で、回転角検出値を読み込みそれぞれメモリに記憶する。ステップS604では、位相補償器2により、メモリに記憶されたトルクセンサ出力を読み込み位相補償演算を行い、位相補償器出力としてメモリに記憶する。ステップS605では、トルク制御器3により、メモリに記憶された位相補償器出力を読み込み、補助トルク電流をマップ演算しメモリに記憶する。
ステップS606は、駆動電流HPF15により、メモリに記憶された駆動電流検出値を読み込み、ハイパスフィルタに通し、上記駆動電流検出値から操舵周波数成分を除去して、駆動電流HPF出力(Ifilt)としてメモリに記憶する。ステップS607では、モータ角度HPF16により、メモリに記憶された回転角検出値を読み込み、ハンドル軸換算の回転角に変換した上でハイパスフィルタに通し、上記変換された回転角検出値から操舵周波数成分を除去して、モータ角度HPF出力(θfilt)としてメモリに記憶する。
【0044】
ステップS608では、回転速度オブザーバ17において、メモリに記憶された駆動電流HPF出力Ifiltとモータ角度HPF出力θfiltとをを読み込んだ後、以下の(13)式によりモータ回転速度推定信号(ωest_obs)を演算しメモリに記憶する。
Ivib:操舵周波数成分をカットしたモータの駆動電流
J:ハンドル軸からみたモータの慣性モーメント
C:ハンドル軸からみたトルクセンサの減衰定数
KTSEN:ハンドル軸からみたトルクセンサのバネ定数
KT:ハンドル軸からみたモータのトルク定数
【0045】
次に、ステップS609で、ダンピング制御器4により、メモリに記憶されたモータ回転速度推定信号ωest_obsを読み込み、制御ゲインを乗じてダンピング電流を演算する。ステップS610では、加算器6において、上記メモリに記憶された補助トルク電流とダンピング電流とを加算し、目標電流としてメモリに記憶する。
上記ステップS601からS610までの動作を制御サンプリング毎に繰り返し、位相補償されたトルクセンサ出力と操舵周波数成分を除去されたモータ回転速度推定信号とからモータ8の目標電流を演算する。
【0046】
このように、本実施の形態6では、モータ回転速度をモータの端子間電圧検出値とモータの回転角検出値とから推定する構成としたことにより、例えば、ブラシレスモータ等を搭載したモータの回転角を検出可能な電動式パワーステアリングシステムに関しては、モータの回転速度をモータの回転角とモータ電流の両方から推定できるので、ステアリング振動等、モータの回転角度が微小で精度良く回転角度が検出できない場合でも、モータの回転角度を微分してモータの回転速度を推定した場合に比べて、精度良くモータの回転速度を得ることができる。
【0047】
なお、上記実施の形態6では、回転速度オブザーバ17において回転速度オブザーバ出力を演算する際、上記(14)式の2次のモデルに対し、1次となる最小次元オブザーバを構築したが、2次となる同一次元オブザーバを構築してもよい。
【0048】
実施の形態7.
次に、本発明の実施の形態7について説明する。
図12は、本発明の実施の形態7に係わる電動式パワーステアリング制御装置の構成を示すブロック図である。上記実施の形態6では、操舵周波数成分を除去した駆動電流HPF出力及びモータ角度HPF出力に基づいてモータの回転速度を推定する回転速度オブザーバ17を設けて操舵周波数成分を除去したモータ回転速度推定信号を出力するようにしたが、本実施の形態7は、図12に示すように、トルクセンサ1で検出されたトルクセンサ出力から操舵周波数成分を除去するトルクHPF18を設けるとともに、モータの慣性モーメントを慣性項,トルクセンサの剛性をバネ項とする振動方程式に対して構成され、上記トルクHPF18からのトルクセンサHPF出力と、電流検出器9で検出された駆動電流検出値を駆動電流HPF15に通して操舵周波数成分を除去した駆動電流HPF出力とに基づいて回転速度推定信号である回転速度オブザーバ出力を推定する回転速度オブザーバ17とを設け、この回転速度オブザーバ出力に基づいてダンピング電流を演算するようにしたものである。
【0049】
ここで、上記回転速度オブザーバ17について説明する。
ステアリング発振が発生する高周波帯域では、運転者によるハンドルの保持及びハンドル自身の慣性の影響により、ハンドルはほとんど動かない。したがって、バネ特性を有するトルクセンサのねじれ角をモータ回転角とみなすことができ、トルクセンサ出力をトルクセンサのバネ定数で除し、操舵周波数成分を除去した上で符号を反転させることにより、上記実施の形態6のモータの回転角と等価な信号を得ることができる。上記回転速度オブザーバ17は、モータの慣性モーメントを慣性項,トルクセンサの剛性をバネ項とする振動方程式を用い、上記モータの回転角と等価な信号と電流検出器9で検出された駆動電流検出値とに基づいて回転速度推定するものである。
【0050】
次に、目標電流を演算するまでのアルゴリズムについてのみ、図13のフローチャートを用いて説明する。
まず、ステップS701でトルクセンサ出力を読み込みメモリに記憶し、ステップS702で駆動電流検出値を読み込みメモリに記憶する。次に、ステップS703で、位相補償器2により、メモリに記憶されたトルクセンサ出力を読み込み位相補償演算を行い、位相補償器出力としてメモリに記憶する。ステップS704では、トルク制御器3により、メモリに記憶された位相補償器出力を読み込み、補助トルク電流をマップ演算しメモリに記憶する。ステップS705では、駆動電流HPF15により、メモリに記憶された駆動電流検出値を読み込み、ハイパスフィルタに通し、操舵周波数成分を除去した後、駆動電流HPF出力(Ifilt)としてメモリに記憶する。ステップS706では、トルクHPF18により、メモリに記憶されたトルクセンサ出力を読み込み、ハイパスフィルタに通し、操舵周波数成分を除去した後、トルクセンサHPF出力(Tfilt)としてメモリに記憶する。
【0051】
ステップS707では、回転速度オブザーバ17において、メモリに記憶された駆動電流HPF出力(Ifilt)とトルクセンサHPF出力(Tfilt)とを読み込んだ後、以下の(15)式により回転速度オブザーバ出力(ωest_obs)を演算しメモリに記憶する。
【0052】
次に、ステップS708で、ダンピング制御器4により、メモリに記憶されたモータ回転速度推定信号ωest_obsを読み込み、制御ゲインを乗じてダンピング電流を演算する。ステップS709では、加算器6により、上記メモリに記憶された補助トルク電流とダンピング電流とを加算し、目標電流としてメモリに記憶する。
上記ステップS701からS709までの動作を制御サンプリング毎に繰り返し、位相補償されたトルクセンサ出力と操舵周波数成分を除去されたモータ回転速度推定信号とからモータ8の目標電流を演算する。
【0053】
このように、本実施の形態7では、モータの回転角度をトルクセンサ出力から推定する構成としたので、モータの回転角を検出するセンサが装備されていない電動式パワーステアリングシステムに対してもモータの回転速度を推定することができ、高価なモータの回転角センサが不要となる。
【0054】
なお、本実施の形態7も、上記実施の形態6と同様に、同一次元オブザーバを構築してもよい。また、本実施の形態7では、操舵トルク信号として、トルクセンサ出力を用いたが、位相補償器2で周波数特性を改善された位相補償器出力を操舵トルク信号として用いてもよい。
【0055】
実施の形態8.
図14は、本発明の実施の形態7に係わる電動式パワーステアリング制御装置の構成を示すブロック図である。同図において、1は運転者が操舵した場合の操舵トルクを検出するトルクセンサ,2はトルクセンサの出力信号の周波数特性を改善する位相補償器、3は位相補償されたトルクセンサ1の出力に基づいて補助トルク電流を演算するトルク制御器、4はダンピング制御器であり、モータ回転速度センサ10で検出されたモータ回転速度推定信号を回転速度ハイパスフィルタ(HPF)11に入力して操舵周波数成分を除去した回転速度HPF出力に基づいてダンピング電流を演算する。6は加算器であり、トルク制御器3で演算された補助トルク電流、ダンピング制御器4で演算されたダンピング電流を加算し、目標電流を構成する。7は電流制御器であり、アシストトルクを発生すべくモータ8に通電される駆動電流を電流検出器9で検出した駆動電流検出値が、目標電流に一致するようにモータの端子に印加する駆動電圧指令値を設定して例えばPWM信号として出力する。本実施の形態8では、更に、車速検出手段19を設け、位相補償器2、トルク制御器3、回転速度HPF11、ダンピング制御器4の各パラメータが、上記車速検出手段19からの車速信号Vsに応じて変化するように構成したものである。
【0056】
これは、一般に車速により、運転者により行われる操舵周波数範囲が異なり、また、タイヤ反力も変化するため、これに応じて、トルク制御器3の位相補償されたトルクセンサ1の出力と補助トルク電流の関係を変化させるためである。位相補償されたトルクセンサ1の出力と補助トルク電流の関係が変化すると、ステアリング発振を起こし易い周波数領域や発振し易さの程度も変化してくる。
本実施の形態8では、これらのパラメータを車速に対して可変にしたことにより、一般に車速により異なる運転者により行われる操舵周波数範囲やステアリング発振を起こし易い周波数領域に応じた最適な制御ができるようになる。
【0057】
次に、実施の形態8の動作について、図15のフローチャートに基づいて、目標電流を演算するまでのアルゴリズムの説明を行う。
まずステップS801で、トルクセンサ出力を読み込みメモリに記憶し、ステップS802で、モータ回転速度推定信号を読み込みメモリに記憶し、ステップS803で車速信号を読み込みメモリに記憶する。次に、ステップS804で、位相補償器2の周波数特性を定めるパラメータを車速信号Vsに対するマップから読み込み、ステップS805で、メモリに記憶されたトルクセンサ出力を読み込み位相補償演算を行い、位相補償器出力としてメモリに記憶する。ステップS806では、トルク制御器3により、上記位相補償されたトルクセンサ1の出力と補助トルク電流の関係を、車速信号に対して2次元マップから読み込み、ステップS807で、メモリに記憶された位相補償器出力を読み込んで、補助トルク電流をマップ演算しメモリに記憶する。ステップS808では、回転速度HPF11で、回転速度HPF11によって除去する周波数帯域を定めるパラメータを車速信号Vsに対するマップから読み込んだ後、ステップS809で、メモリに記憶されたモータ回転速度推定信号を読み込んでハイパスフィルタの演算を行い、回転速度HPF出力としてメモリに記憶する。ステップS810では、ダンピング制御器4により、ダンピング制御器4における制御ゲインを車速信号に対するマップから読み込んだ後、ステップS811で、メモリに記憶された回転速度HPF出力を読み込み、制御ゲインを乗じてダンピング電流を演算する。ステップS812は、加算器6により、メモリに記憶された補助トルク電流とダンピング電流を加算し、目標電流としてメモリに記憶する。
上記ステップS801からS812までの動作を制御サンプリング毎に繰り返し、位相補償されたトルクセンサ出力と操舵周波数成分を除去されたモータ回転速度推定信号とから車速信号Vsに応じたモータ8の目標電流を演算する。
【0058】
このように、本実施の形態8では、各操舵成分除去手段で除去する周波数帯域を車速信号Vsに応じて可変させるとともに、制御系の各パラメータも同様に車速信号Vsに応じて変化させるようにしたので、車速によって異なる運転者の操舵による操舵周波数範囲やステアリング発振を起こし易い周波数領域に応じた最適な制御を行うことができる。
【0059】
なお、上記実施の形態8では、上記実施の形態1に対して、車速信号Vsに応じて制御パラメータを変化させる例について示したが、上記実施の形態2〜7の電動式パワーステアリング制御装置に対しても車速信号Vsに応じて制御パラメータを変化させるようにしてもよい。
【0066】
【発明の効果】
以上説明したように、請求項1に記載の発明によれば、運転者による操舵トルクを検出する操舵トルク検出手段と、上記検出された操舵トルク信号に基づいて上記操舵トルクを補助する補助トルク電流を演算するトルク制御器と、上記操舵トルクを補助するトルクを発生するモータと、上記モータの回転速度を推定する回転速度推定手段と、上記推定されたモータ回転速度の推定値を用いて、上記補助トルク電流に加算されるダンピング電流を演算するダンピング制御器とを備えた電動式パワーステアリング制御装置において、上記回転速度推定手段を、モータ回転角の検出値から操舵による成分を除去するモータ回転角用操舵成分除去手段と、モータに通電される電流の検出値もしくは指令値から操舵による成分を除去するモータ電流用操舵成分除去手段と、モータの慣性モーメントを慣性項,トルクセンサの剛性をバネ項とする振動方程式に対して構成され、上記モータ回転角用操舵成分除去手段及び上記モータ電流用操舵成分除去手段から出力される、操舵成分が除去されたモータ回転角とモータ電流とに基づいてモータ回転速度の推定値を演算する回転速度オブザーバとを備え、上記回転速度オブザーバで演算された操舵による速度成分を除去したモータの回転速度推定値に基づいてダンピング電流を演算するよう構成したので、コイル電流からコイルでの電圧降下を求めるときに必要な微分器を用いることなく、操舵周波数を越える周波数帯域でのモータの回転速度を精度良く求めることができるとともに、トルク比例ゲインを向上させたことに伴ってダンピング電流を大きくしても、運転者がハンドルの振動を感じることなく操舵トルクを低減することができる。
【0067】
請求項2に記載の発明によれば、運転者による操舵トルクを検出する操舵トルク検出手段と、上記検出された操舵トルク信号に基づいて上記操舵トルクを補助する補助トルク電流を演算するトルク制御器と、上記操舵トルクを補助するトルクを発生するモータと、上記モータの回転速度を推定する回転速度推定手段と、上記推定されたモータ回転速度の推定値を用いて、上記補助トルク電流に加算されるダンピング電流を演算するダンピング制御器とを備えた電動式パワーステアリング制御装置であって、上記回転速度推定手段を、モータに通電される電流の検出値もしくは指令値から操舵による成分を除去するモータ電流用操舵成分除去手段と、操舵トルク検出手段の出力から操舵による成分を除去する操舵トルク用操舵成分除去手段と、モータの慣性モーメントを慣性項,トルクセンサの剛性をバネ項とする振動方程式に対して構成され、上記モータ電流用操舵成分除去手段及び上記操舵トルク用操舵成分除去手段から出力される、操舵成分が除去されたモータ電流と操舵トルクとに基づいてモータ回転速度の推定値を演算する回転速度オブザーバとを備え、上記回転速度オブザーバで演算された操舵による速度成分を除去したモータの回転速度推定値に基づいてダンピング電流を演算するようにしたので、高価なモーター回転角センサを用いることなく、モータの回転速度を精度良く求めることができるとともに、トルク比例ゲインを向上させたことに伴ってダンピング電流を大きくしても、運転者がハンドルの振動を感じることなく操舵トルクを低減することができる。
【0068】
請求項3に記載の発明によれば、車速検出手段を有し、車速に応じて、上記各操舵成分除去手段のいずれかあるいは全部で除去する周波数帯域を可変としたので、車速に応じて、操舵周波数範囲やステアリング発振を起こし易い周波数領域に対する最適な制御を行うことができる。
【図面の簡単な説明】
【図1】 本発明の実施の形態1に係わる電動式パワーステアリング制御装置の構成を示すブロック図である。
【図2】 実施の形態1のアルゴリズムを示すフローチャートである。
【図3】 実施の形態2に係わる電動式パワーステアリング制御装置の構成を示すブロック図である。
【図4】 実施の形態2のアルゴリズムを示すフローチャートである。
【図5】 実施の形態3に係わる電動式パワーステアリング制御装置の構成を示すブロック図である。
【図6】 実施の形態3のアルゴリズムを示すフローチャートである。
【図7】 実施の形態4のアルゴリズムを示すフローチャートである。
【図8】 実施の形態5のアルゴリズムを示すフローチャートである。
【図9】 実施の形態5に用いたコイルの逆特性に相当するフィルタの特性を示す図である。
【図10】 実施の形態6に係わる電動式パワーステアリング制御装置の構成を示すブロック図である。
【図11】 実施の形態6のアルゴリズムを示すフローチャートである。
【図12】 実施の形態7に係わる電動式パワーステアリング制御装置の構成を示すブロック図である。
【図13】 実施の形態7のアルゴリズムを示すフローチャートである。
【図14】 実施の形態8に係わる電動式パワーステアリング制御装置の構成を示すブロック図である。
【図15】 実施の形態8のアルゴリズムを示すフローチャートである。
【図16】 従来の電動式パワーステアリング制御装置の構成を示すブロック図である。
【符号の説明】
1 トルクセンサ、2 位相補償器、3 トルク制御器、4 ダンピング制御器、5 補償制御器、5a 摩擦補償制御器、5b 慣性補償制御器、
6 加算器、7 電流制御器、8 モータ、9 電流検出器、10 モータ回転速度センサ、11 回転速度HPF、12 端子間電圧検出器、13回転速度推定器、14 回転角検出器、15 駆動電流HPF、16 モータ角度HPF、17 回転速度オブザーバ、18 トルクHPF、19 車速検出手段、
20 目標電流演算手段。
Claims (3)
- 運転者による操舵トルクを検出する操舵トルク検出手段と、上記検出された操舵トルク信号に基づいて上記操舵トルクを補助する補助トルク電流を演算するトルク制御器と、上記操舵トルクを補助するトルクを発生するモータと、上記モータの回転速度を推定する回転速度推定手段と、上記推定されたモータ回転速度の推定値を用いて、上記補助トルク電流に加算されるダンピング電流を演算するダンピング制御器とを備えた電動式パワーステアリング制御装置であって、上記回転速度推定手段は、モータ回転角の検出値から操舵による成分を除去するモータ回転角用操舵成分除去手段と、モータに通電される電流の検出値もしくは指令値から操舵による成分を除去するモータ電流用操舵成分除去手段と、モータの慣性モーメントを慣性項,トルクセンサの剛性をバネ項とする振動方程式に対して構成され、上記モータ回転角用操舵成分除去手段及び上記モータ電流用操舵成分除去手段から出力される、操舵成分が除去されたモータ回転角とモータ電流とに基づいてモータ回転速度の推定値を演算する回転速度オブザーバとを備えたことを特徴とする電動式パワーステアリング制御装置。
- 運転者による操舵トルクを検出する操舵トルク検出手段と、上記検出された操舵トルク信号に基づいて上記操舵トルクを補助する補助トルク電流を演算するトルク制御器と、上記操舵トルクを補助するトルクを発生するモータと、上記モータの回転速度を推定する回転速度推定手段と、上記推定されたモータ回転速度の推定値を用いて、上記補助トルク電流に加算されるダンピング電流を演算するダンピング制御器とを備えた電動式パワーステアリング制御装置であって、上記回転速度推定手段は、モータに通電される電流の検出値もしくは指令値から操舵による成分を除去するモータ電流用操舵成分除去手段と、操舵トルク検出手段の出力から操舵による成分を除去する操舵トルク用操舵成分除去手段と、モータの慣性モーメントを慣性項,トルクセンサの剛性をバネ項とする振動方程式に対して構成され、上記モータ電流用操舵成分除去手段及び上記操舵トルク用操舵成分除去手段から出力される、操舵成分が除去されたモータ電流と操舵トルクとに基づいてモータ回転速度の推定値を演算する回転速度オブザーバとを備えたことを特徴とする電動式パワーステアリング制御装置。
- 車速検出手段を有し、車速に応じて、上記各操舵成分除去手段のいずれかあるいは全部で除去する周波数帯域を可変とすることを特徴とする請求項1または請求項2に記載の電動式パワーステアリング制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP34195698A JP3712876B2 (ja) | 1998-12-01 | 1998-12-01 | 電動式パワーステアリング制御装置 |
| US09/340,385 US6161068A (en) | 1998-12-01 | 1999-06-28 | Electric power steering control system |
| DE69930820T DE69930820T2 (de) | 1998-12-01 | 1999-07-14 | Steuersystem für eine elektrische Servolenkung |
| EP99113648A EP1006042B1 (en) | 1998-12-01 | 1999-07-14 | Electric power steering control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP34195698A JP3712876B2 (ja) | 1998-12-01 | 1998-12-01 | 電動式パワーステアリング制御装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005207425A Division JP4223501B2 (ja) | 2005-07-15 | 2005-07-15 | 電動式パワーステアリング制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000168600A JP2000168600A (ja) | 2000-06-20 |
| JP3712876B2 true JP3712876B2 (ja) | 2005-11-02 |
Family
ID=18350077
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP34195698A Expired - Fee Related JP3712876B2 (ja) | 1998-12-01 | 1998-12-01 | 電動式パワーステアリング制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6161068A (ja) |
| EP (1) | EP1006042B1 (ja) |
| JP (1) | JP3712876B2 (ja) |
| DE (1) | DE69930820T2 (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102007044579A1 (de) | 2007-03-12 | 2008-09-18 | Mitsubishi Electric Corp. | Elektroservolenk-Steuervorrichtung |
| WO2009069196A1 (ja) | 2007-11-27 | 2009-06-04 | Mitsubishi Electric Corporation | 操舵制御装置 |
| WO2009096008A1 (ja) | 2008-01-30 | 2009-08-06 | Mitsubishi Electric Corporation | 操舵制御装置 |
| CN103121465A (zh) * | 2011-11-18 | 2013-05-29 | 操纵技术Ip控股公司 | 车轮干扰抑制 |
| US9409595B2 (en) | 2014-09-15 | 2016-08-09 | Steering Solutions Ip Holding Corporation | Providing assist torque without hand wheel torque sensor for zero to low vehicle speeds |
| US9540044B2 (en) | 2013-11-15 | 2017-01-10 | Steering Solutions Ip Holding Corporation | Hand wheel angle from vehicle dynamic sensors or wheel speeds |
| US9540040B2 (en) | 2014-06-26 | 2017-01-10 | Steering Solutions Ip Holding Corporation | Phase plane based transitional damping for electric power steering |
| US9676409B2 (en) | 2013-03-11 | 2017-06-13 | Steering Solutions Ip Holding Corporation | Road wheel disturbance rejection based on hand wheel acceleration |
| US10144445B2 (en) | 2014-09-15 | 2018-12-04 | Steering Solutions Ip Holding Corporation | Modified static tire model for providing assist without a torque sensor for zero to low vehicle speeds |
| US10155531B2 (en) | 2013-04-30 | 2018-12-18 | Steering Solutions Ip Holding Corporation | Providing assist torque without hand wheel torque sensor |
| US10155534B2 (en) | 2016-06-14 | 2018-12-18 | Steering Solutions Ip Holding Corporation | Driver intent estimation without using torque sensor signal |
| US10336363B2 (en) | 2015-09-03 | 2019-07-02 | Steering Solutions Ip Holding Corporation | Disabling controlled velocity return based on torque gradient and desired velocity error |
| US10464594B2 (en) | 2015-09-03 | 2019-11-05 | Steering Solutions Ip Holding Corporation | Model based driver torque estimation |
Families Citing this family (84)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3353770B2 (ja) * | 1999-08-19 | 2002-12-03 | 三菱電機株式会社 | 電動式パワーステアリング制御装置 |
| JP3412579B2 (ja) * | 1999-10-19 | 2003-06-03 | トヨタ自動車株式会社 | 車両の電動パワーステアリング装置 |
| JP2001171539A (ja) * | 1999-12-16 | 2001-06-26 | Mitsubishi Electric Corp | 電動パワーステアリング装置 |
| JP3847516B2 (ja) * | 2000-03-01 | 2006-11-22 | 三菱電機株式会社 | 電動パワーステアリング制御装置及びその制御方法 |
| JP2001341658A (ja) * | 2000-03-29 | 2001-12-11 | Toyoda Mach Works Ltd | 電動パワーステアリング装置の制御装置 |
| EP1170196B1 (en) * | 2000-06-29 | 2008-08-06 | TRW Limited | Improvements relating to electrical power assisted steering systems |
| FR2811628B1 (fr) * | 2000-07-11 | 2003-01-24 | Peugeot Citroen Automobiles Sa | Ensemble de direction assistee electrique pour vehicule automobile |
| JP4248739B2 (ja) * | 2000-08-30 | 2009-04-02 | 三菱電機株式会社 | 電動パワーステアリング制御装置及びその制御方法 |
| GB2369332A (en) * | 2000-11-22 | 2002-05-29 | Trw Lucasvarity Electric Steer | Compensation for motor inertia in electric power-assisted steering systems |
| JP4082860B2 (ja) * | 2000-11-29 | 2008-04-30 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP4623824B2 (ja) * | 2000-12-28 | 2011-02-02 | カヤバ工業株式会社 | 電動パワーステアリング制御装置 |
| US6900609B2 (en) * | 2001-03-14 | 2005-05-31 | Siemens Aktiengesellschaft | Method and control structure for damping low-frequency load oscillations in drives with a motor and load |
| JP3982739B2 (ja) * | 2001-05-08 | 2007-09-26 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| US7188701B2 (en) * | 2001-06-08 | 2007-03-13 | Delphi Technologies, Inc. | Velocity compensation control for electric steering systems |
| JP4797294B2 (ja) * | 2001-07-26 | 2011-10-19 | 日本精工株式会社 | 電動パワーステアリング装置の制御装置 |
| US6535805B2 (en) * | 2001-08-10 | 2003-03-18 | Delphi Technologies, Inc. | Robust determination of hand-wheel position |
| JP3559260B2 (ja) * | 2001-09-04 | 2004-08-25 | 三菱電機株式会社 | 電動パワーステアリング制御装置及び制御方法 |
| FR2832375B1 (fr) * | 2001-11-20 | 2005-07-08 | Peugeot Citroen Automobiles Sa | Dispositif d'assistance electrique de direction de vehicule automobile, et procede de commande associe |
| EP1479157B1 (de) * | 2002-02-13 | 2006-12-06 | Continental Teves AG & Co. oHG | Verfahren zur fehlererkennung für elektromotoren |
| JP2004148952A (ja) * | 2002-10-30 | 2004-05-27 | Koyo Seiko Co Ltd | 操舵装置 |
| KR100764217B1 (ko) | 2002-12-24 | 2007-10-05 | 주식회사 만도 | 전자제어 파워 스티어링 시스템에서의 모터 출력 제어장치 |
| US6901320B2 (en) | 2003-01-15 | 2005-05-31 | Visteon Global Technologies, Inc. | Friction compensation in a vehicle steering system |
| JP4033070B2 (ja) * | 2003-07-30 | 2008-01-16 | 株式会社デンソー | パワーステアリング装置 |
| JP4015600B2 (ja) * | 2003-08-18 | 2007-11-28 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP4360169B2 (ja) * | 2003-10-01 | 2009-11-11 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP4120570B2 (ja) * | 2003-11-21 | 2008-07-16 | 日産自動車株式会社 | 電動パワーステアリング装置 |
| JP4389208B2 (ja) * | 2004-02-12 | 2009-12-24 | 株式会社デンソー | 電動パワーステアリング制御装置 |
| JP4055746B2 (ja) * | 2004-06-18 | 2008-03-05 | アイシン・エィ・ダブリュ株式会社 | 電動車両駆動制御装置及び電動車両駆動制御方法 |
| JP4083728B2 (ja) * | 2004-10-29 | 2008-04-30 | 本田技研工業株式会社 | 電動ステアリング装置 |
| JP4525306B2 (ja) * | 2004-11-12 | 2010-08-18 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| US7546191B2 (en) * | 2004-12-20 | 2009-06-09 | General Motors Corporation | Handwheel damping control of active steering system |
| WO2006075775A1 (ja) * | 2005-01-14 | 2006-07-20 | Nsk Ltd. | 電動パワーステアリング装置の制御装置 |
| JP4715212B2 (ja) * | 2005-01-24 | 2011-07-06 | 日本精工株式会社 | 電動パワーステアリング装置の制御装置 |
| WO2007119333A1 (ja) | 2006-04-13 | 2007-10-25 | Mitsubishi Electric Corporation | 電動パワーステアリング制御装置 |
| EP1982896B1 (en) * | 2007-04-20 | 2010-01-27 | Jtekt Corporation | Electric power steering apparatus |
| JP4468415B2 (ja) | 2007-06-29 | 2010-05-26 | 三菱電機株式会社 | 電動パワーステアリング制御装置 |
| US8219283B2 (en) * | 2007-11-14 | 2012-07-10 | Ford Global Technologies | Active steering nibble control algorithm for electric steering systems |
| GB2454788B (en) * | 2007-11-14 | 2012-07-11 | Ford Global Tech Llc | Active steering nibble control algorithm for electric steering systems |
| WO2009078074A1 (ja) * | 2007-12-14 | 2009-06-25 | Mitsubishi Electric Corporation | 電動パワーステアリング制御装置 |
| CN101970279B (zh) * | 2008-04-04 | 2012-10-10 | 三菱电机株式会社 | 电动式动力转向控制装置 |
| US8744682B2 (en) * | 2008-05-30 | 2014-06-03 | GM Global Technology Operations LLC | Reducing the effects of vibrations in an electric power steering (EPS) system |
| US8548684B2 (en) | 2008-07-30 | 2013-10-01 | Mitsubishi Electric Corporation | Electric power steering control apparatus |
| US8344673B2 (en) * | 2008-12-04 | 2013-01-01 | Nuovo Pignone S.P.A. | Torsional mode damping apparatus |
| CN102105341B (zh) * | 2009-01-28 | 2013-01-02 | 日本精工株式会社 | 电动动力转向装置 |
| US8831854B2 (en) * | 2010-08-16 | 2014-09-09 | Chrysler Group Llc | Active shimmy mitigation |
| US9440674B2 (en) * | 2010-09-15 | 2016-09-13 | GM Global Technology Operations LLC | Methods, systems and apparatus for steering wheel vibration reduction in electric power steering systems |
| US9266558B2 (en) | 2010-09-15 | 2016-02-23 | GM Global Technology Operations LLC | Methods, systems and apparatus for steering wheel vibration reduction in electric power steering systems |
| US9327762B2 (en) | 2010-12-14 | 2016-05-03 | GM Global Technology Operations LLC | Electric power steering systems with improved road feel |
| US8862324B2 (en) * | 2011-03-07 | 2014-10-14 | Steering Solutions Ip Holding Corporation | Damping methods and systems for electric power steering |
| WO2012160850A1 (ja) | 2011-05-25 | 2012-11-29 | 三菱電機株式会社 | 電動パワーステアリングの制御装置 |
| DE102011118849B4 (de) | 2011-11-18 | 2018-10-25 | Volkswagen Aktiengesellschaft | Vorrichtung und Verfahren zur Steuerung eines Elektromotors einer Servolenkung in einem Kraftfahrzeug |
| US8924082B2 (en) * | 2012-03-30 | 2014-12-30 | Steering Solutions Ip Holding Corporation | System and method for controlling a motor |
| JP5959981B2 (ja) * | 2012-08-03 | 2016-08-02 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP5971479B2 (ja) * | 2013-02-25 | 2016-08-17 | マツダ株式会社 | 電動パワーステアリング制御装置 |
| US9663139B2 (en) | 2013-02-26 | 2017-05-30 | Steering Solutions Ip Holding Corporation | Electric motor feedforward control utilizing dynamic motor model |
| US9136785B2 (en) | 2013-03-12 | 2015-09-15 | Steering Solutions Ip Holding Corporation | Motor control system to compensate for torque ripple |
| US9143081B2 (en) | 2013-03-14 | 2015-09-22 | Steering Solutions Ip Holding Corporation | Motor control system having bandwidth compensation |
| US9809246B2 (en) | 2013-04-23 | 2017-11-07 | Nsk Ltd. | Electric power steering apparatus |
| WO2014181463A1 (ja) | 2013-05-10 | 2014-11-13 | 三菱電機株式会社 | 電動パワーステアリング制御装置および操舵制御方法 |
| EP2998199B1 (en) | 2013-05-15 | 2018-08-01 | Mitsubishi Electric Corporation | Electric power steering control device and control method for same |
| DE102013110149A1 (de) * | 2013-09-16 | 2015-04-02 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Steuern einer Lenkung in einem Kraftfahrzeug |
| KR101557967B1 (ko) | 2013-10-22 | 2015-10-06 | 현대모비스 주식회사 | Mdps 마찰 보상 로직 및 이를 이용한 마찰 보상 방법 |
| US10389289B2 (en) | 2014-02-06 | 2019-08-20 | Steering Solutions Ip Holding Corporation | Generating motor control reference signal with control voltage budget |
| EP2913502A1 (de) * | 2014-02-27 | 2015-09-02 | Siemens Aktiengesellschaft | Verfahren zum Betrieb eines mit einem Generator gekoppelten Verbrennungsmotors und Vorrichtung zur Durchführung des Verfahrens |
| JP6314552B2 (ja) * | 2014-03-07 | 2018-04-25 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| US10003285B2 (en) | 2014-06-23 | 2018-06-19 | Steering Solutions Ip Holding Corporation | Decoupling current control utilizing direct plant modification in electric power steering system |
| JP2016041542A (ja) * | 2014-08-18 | 2016-03-31 | 株式会社ジェイテクト | ステアリング装置 |
| US9809247B2 (en) | 2015-01-30 | 2017-11-07 | Steering Solutions Ip Holding Corporation | Motor control current sensor loss of assist mitigation for electric power steering |
| US9751558B2 (en) * | 2015-03-25 | 2017-09-05 | Ford Global Technologies, Llc | Handwheel obstruction detection and inertia compensation |
| US9616928B2 (en) | 2015-03-25 | 2017-04-11 | Ford Global Technologies, Llc | Steering angle control for multiple features |
| US9849864B2 (en) | 2015-07-31 | 2017-12-26 | Ford Global Technologies, Llc | Vehicle parking assist system |
| US9981656B2 (en) | 2015-10-13 | 2018-05-29 | Ford Global Technologies, Llc | Vehicle parking assist system |
| US10328933B2 (en) | 2015-10-29 | 2019-06-25 | Ford Global Technologies, Llc | Cognitive reverse speed limiting |
| US9895945B2 (en) | 2015-12-08 | 2018-02-20 | Ford Global Technologies, Llc | Trailer backup assist system with hitch assist |
| CN106257820B (zh) * | 2016-08-25 | 2019-06-28 | 珠海市磐石电子科技有限公司 | 电机多模态控制方法及系统 |
| US10135368B2 (en) | 2016-10-01 | 2018-11-20 | Steering Solutions Ip Holding Corporation | Torque ripple cancellation algorithm involving supply voltage limit constraint |
| US9829883B1 (en) | 2016-10-17 | 2017-11-28 | Ford Global Technologies, Llc | Trailer backup assist system having remote control and user sight management |
| CN109963772B (zh) * | 2016-11-07 | 2021-07-20 | 日本精工株式会社 | 电动助力转向装置 |
| JP7035574B2 (ja) * | 2018-01-31 | 2022-03-15 | 株式会社ジェイテクト | 操舵制御装置 |
| JP7338620B2 (ja) * | 2018-05-11 | 2023-09-05 | ニデック株式会社 | モータ制御装置、駆動装置およびパワーステアリング装置 |
| US11511795B2 (en) * | 2018-10-11 | 2022-11-29 | Steering Solutions Ip Holding Corporation | Dither noise management in electric power steering systems |
| JP7305113B2 (ja) * | 2019-05-30 | 2023-07-10 | 国立大学法人長岡技術科学大学 | モータ制御装置、モータ装置および機械学習装置 |
| FR3103776B1 (fr) * | 2019-11-29 | 2022-12-30 | Jtekt Europe Sas | Procédé de contrôle d’un moteur d’assistance d’un système de direction assistée comprenant un algorithme de compensation des oscillations d’un volant liées à la présence d’un balourd |
| DE102021209380B3 (de) | 2021-08-26 | 2022-05-19 | Zf Automotive Germany Gmbh | Verfahren zur Drehmomentregelung, Steuergerät sowie elektromechanisch unterstütztes Lenksystem |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR910000398B1 (ko) * | 1986-06-12 | 1991-01-25 | 미쓰비시전기 주식회사 | 모터구동식 동력조향 제어장치 |
| JPS6320266A (ja) * | 1986-07-11 | 1988-01-27 | Mitsubishi Electric Corp | モ−タ駆動式パワ−ステアリング制御装置 |
| DE68925130T2 (de) * | 1988-07-11 | 1996-05-09 | Koyo Seiko Co | Servolenkung |
| US5473539A (en) * | 1992-12-11 | 1995-12-05 | Honda Giken Kogyo Kabushiki Kaisha | Electrically operated power steering apparatus |
| JP3133914B2 (ja) * | 1994-12-21 | 2001-02-13 | 三菱電機株式会社 | 電動パワーステアリング装置 |
-
1998
- 1998-12-01 JP JP34195698A patent/JP3712876B2/ja not_active Expired - Fee Related
-
1999
- 1999-06-28 US US09/340,385 patent/US6161068A/en not_active Expired - Lifetime
- 1999-07-14 EP EP99113648A patent/EP1006042B1/en not_active Expired - Lifetime
- 1999-07-14 DE DE69930820T patent/DE69930820T2/de not_active Expired - Lifetime
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8423245B2 (en) | 2007-03-12 | 2013-04-16 | Mitsubishi Electric Corporation | Electric power steering control apparatus |
| DE102007044579A1 (de) | 2007-03-12 | 2008-09-18 | Mitsubishi Electric Corp. | Elektroservolenk-Steuervorrichtung |
| DE102007044579B4 (de) * | 2007-03-12 | 2016-12-08 | Mitsubishi Electric Corp. | Elektroservolenk-Steuervorrichtung |
| WO2009069196A1 (ja) | 2007-11-27 | 2009-06-04 | Mitsubishi Electric Corporation | 操舵制御装置 |
| WO2009096008A1 (ja) | 2008-01-30 | 2009-08-06 | Mitsubishi Electric Corporation | 操舵制御装置 |
| CN103121465B (zh) * | 2011-11-18 | 2017-04-12 | 操纵技术Ip控股公司 | 用于车轮干扰抑制的控制系统和控制方法 |
| CN103121465A (zh) * | 2011-11-18 | 2013-05-29 | 操纵技术Ip控股公司 | 车轮干扰抑制 |
| US9676409B2 (en) | 2013-03-11 | 2017-06-13 | Steering Solutions Ip Holding Corporation | Road wheel disturbance rejection based on hand wheel acceleration |
| US10155531B2 (en) | 2013-04-30 | 2018-12-18 | Steering Solutions Ip Holding Corporation | Providing assist torque without hand wheel torque sensor |
| US9540044B2 (en) | 2013-11-15 | 2017-01-10 | Steering Solutions Ip Holding Corporation | Hand wheel angle from vehicle dynamic sensors or wheel speeds |
| US9540040B2 (en) | 2014-06-26 | 2017-01-10 | Steering Solutions Ip Holding Corporation | Phase plane based transitional damping for electric power steering |
| US10144445B2 (en) | 2014-09-15 | 2018-12-04 | Steering Solutions Ip Holding Corporation | Modified static tire model for providing assist without a torque sensor for zero to low vehicle speeds |
| US9409595B2 (en) | 2014-09-15 | 2016-08-09 | Steering Solutions Ip Holding Corporation | Providing assist torque without hand wheel torque sensor for zero to low vehicle speeds |
| US10336363B2 (en) | 2015-09-03 | 2019-07-02 | Steering Solutions Ip Holding Corporation | Disabling controlled velocity return based on torque gradient and desired velocity error |
| US10464594B2 (en) | 2015-09-03 | 2019-11-05 | Steering Solutions Ip Holding Corporation | Model based driver torque estimation |
| US10155534B2 (en) | 2016-06-14 | 2018-12-18 | Steering Solutions Ip Holding Corporation | Driver intent estimation without using torque sensor signal |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000168600A (ja) | 2000-06-20 |
| EP1006042A3 (en) | 2004-02-04 |
| DE69930820T2 (de) | 2006-11-16 |
| EP1006042A2 (en) | 2000-06-07 |
| US6161068A (en) | 2000-12-12 |
| EP1006042B1 (en) | 2006-04-12 |
| DE69930820D1 (de) | 2006-05-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3712876B2 (ja) | 電動式パワーステアリング制御装置 | |
| EP1077171B1 (en) | Electric power steering controller and control method thereof | |
| JP4227133B2 (ja) | 電動パワーステアリング制御装置 | |
| KR101168519B1 (ko) | 전동식 파워 스티어링 제어 장치 | |
| EP0900710B1 (en) | Electric power steering controller | |
| EP2599688B1 (en) | Electric power steering device | |
| KR20190003874A (ko) | 전동식 파워 스티어링 시스템의 토크 보상 장치 및 방법 | |
| WO2007119333A1 (ja) | 電動パワーステアリング制御装置 | |
| JP4223501B2 (ja) | 電動式パワーステアリング制御装置 | |
| JP5140158B2 (ja) | 電動式パワーステアリング制御装置 | |
| JP4568996B2 (ja) | 操舵装置と操舵装置の抗力算出装置 | |
| JP3623721B2 (ja) | 電動式パワーステアリング装置 | |
| JPH06217578A (ja) | 2慣性ねじり振動系の速度制御におけるイナーシャ推定方法 | |
| JP2003081122A (ja) | 車両用操舵制御装置 | |
| JP2003081112A (ja) | 電動式パワーステアリング制御装置及びその制御方法 | |
| JP4129021B2 (ja) | 車両用操舵制御装置 | |
| JPH11139339A (ja) | 電動式ステアリング制御方法及び電動式ステアリング制御装置 | |
| JP2824926B2 (ja) | 電動式パワー・ステアリング装置 | |
| JP2767637B2 (ja) | 電動式パワー・ステアリング装置 | |
| JP3196266B2 (ja) | 電動機の速度制御装置 | |
| JP4391534B2 (ja) | 車両用操舵装置 | |
| JP2006076484A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2004040850A (ja) | 電動パワーステアリング装置 | |
| JP2023173527A (ja) | モータ制御装置、電動アクチュエータおよび電動パワーステアリング装置 | |
| KR19980075903A (ko) | 공진계의 진동억제 제어방법 및 제어장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050222 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050420 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20050517 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050715 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20050721 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050816 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050818 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080826 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090826 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090826 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100826 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110826 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110826 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120826 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120826 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130826 Year of fee payment: 8 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |