JP2018535013A - 主車輪及び遠位補助車輪を有する自己平衡ボード - Google Patents
主車輪及び遠位補助車輪を有する自己平衡ボード Download PDFInfo
- Publication number
- JP2018535013A JP2018535013A JP2018524830A JP2018524830A JP2018535013A JP 2018535013 A JP2018535013 A JP 2018535013A JP 2018524830 A JP2018524830 A JP 2018524830A JP 2018524830 A JP2018524830 A JP 2018524830A JP 2018535013 A JP2018535013 A JP 2018535013A
- Authority
- JP
- Japan
- Prior art keywords
- wheel assembly
- auxiliary wheel
- self
- scaffold
- balancing board
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- SXHLTVKPNQVZGL-UHFFFAOYSA-N 1,2-dichloro-3-(3-chlorophenyl)benzene Chemical compound ClC1=CC=CC(C=2C(=C(Cl)C=CC=2)Cl)=C1 SXHLTVKPNQVZGL-UHFFFAOYSA-N 0.000 description 3
- 230000000712 assembly Effects 0.000 description 3
- 238000000429 assembly Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- WMFYOYKPJLRMJI-UHFFFAOYSA-N Lercanidipine hydrochloride Chemical compound Cl.COC(=O)C1=C(C)NC(C)=C(C(=O)OC(C)(C)CN(C)CCC(C=2C=CC=CC=2)C=2C=CC=CC=2)C1C1=CC=CC([N+]([O-])=O)=C1 WMFYOYKPJLRMJI-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 244000309466 calf Species 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
Images













Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C17/00—Roller skates; Skate-boards
- A63C17/01—Skateboards
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C17/00—Roller skates; Skate-boards
- A63C17/004—Roller skates; Skate-boards with auxiliary wheels not contacting the riding surface during steady riding
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C17/00—Roller skates; Skate-boards
- A63C17/01—Skateboards
- A63C17/014—Wheel arrangements
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C17/00—Roller skates; Skate-boards
- A63C17/04—Roller skates; Skate-boards with wheels arranged otherwise than in two pairs
- A63C17/06—Roller skates; Skate-boards with wheels arranged otherwise than in two pairs single-track type
- A63C17/08—Roller skates; Skate-boards with wheels arranged otherwise than in two pairs single-track type single-wheel type with single axis
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C17/00—Roller skates; Skate-boards
- A63C17/12—Roller skates; Skate-boards with driving mechanisms
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C17/00—Roller skates; Skate-boards
- A63C17/14—Roller skates; Skate-boards with brakes, e.g. toe stoppers, freewheel roller clutches
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C17/00—Roller skates; Skate-boards
- A63C17/14—Roller skates; Skate-boards with brakes, e.g. toe stoppers, freewheel roller clutches
- A63C17/1409—Roller skates; Skate-boards with brakes, e.g. toe stoppers, freewheel roller clutches contacting one or more of the wheels
- A63C17/1418—Roller skates; Skate-boards with brakes, e.g. toe stoppers, freewheel roller clutches contacting one or more of the wheels with radial movement against the roll surface of the wheel
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C17/00—Roller skates; Skate-boards
- A63C17/26—Roller skates; Skate-boards with special auxiliary arrangements, e.g. illuminating, marking, or push-off devices
- A63C17/265—Roller skates; Skate-boards with special auxiliary arrangements, e.g. illuminating, marking, or push-off devices with handles or hand supports
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62H—CYCLE STANDS; SUPPORTS OR HOLDERS FOR PARKING OR STORING CYCLES; APPLIANCES PREVENTING OR INDICATING UNAUTHORIZED USE OR THEFT OF CYCLES; LOCKS INTEGRAL WITH CYCLES; DEVICES FOR LEARNING TO RIDE CYCLES
- B62H1/00—Supports or stands forming part of or attached to cycles
- B62H1/10—Supports or stands forming part of or attached to cycles involving means providing for a stabilised ride
- B62H1/12—Supports or stands forming part of or attached to cycles involving means providing for a stabilised ride using additional wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K1/00—Unicycles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K11/00—Motorcycles, engine-assisted cycles or motor scooters with one or two wheels
- B62K11/007—Automatic balancing machines with single main ground engaging wheel or coaxial wheels supporting a rider
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K3/00—Bicycles
- B62K3/002—Bicycles without a seat, i.e. the rider operating the vehicle in a standing position, e.g. non-motorized scooters; non-motorized scooters with skis or runners
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62L—BRAKES SPECIALLY ADAPTED FOR CYCLES
- B62L1/00—Brakes; Arrangements thereof
- B62L1/02—Brakes; Arrangements thereof in which cycle wheels are engaged by brake elements
- B62L1/04—Brakes; Arrangements thereof in which cycle wheels are engaged by brake elements the tyre surfaces being engaged
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C17/00—Roller skates; Skate-boards
- A63C17/14—Roller skates; Skate-boards with brakes, e.g. toe stoppers, freewheel roller clutches
- A63C17/1409—Roller skates; Skate-boards with brakes, e.g. toe stoppers, freewheel roller clutches contacting one or more of the wheels
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C17/00—Roller skates; Skate-boards
- A63C17/14—Roller skates; Skate-boards with brakes, e.g. toe stoppers, freewheel roller clutches
- A63C2017/1463—Foot or toe operated
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C2203/00—Special features of skates, skis, roller-skates, snowboards and courts
- A63C2203/12—Electrically powered or heated
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C2203/00—Special features of skates, skis, roller-skates, snowboards and courts
- A63C2203/18—Measuring a physical parameter, e.g. speed, distance
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C2203/00—Special features of skates, skis, roller-skates, snowboards and courts
- A63C2203/24—Processing or storing data, e.g. with electronic chip
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63C—SKATES; SKIS; ROLLER SKATES; DESIGN OR LAYOUT OF COURTS, RINKS OR THE LIKE
- A63C2203/00—Special features of skates, skis, roller-skates, snowboards and courts
- A63C2203/42—Details of chassis of ice or roller skates, of decks of skateboards
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K2202/00—Motorised scooters
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Motorcycle And Bicycle Frame (AREA)
- Braking Elements And Transmission Devices (AREA)
- Braking Arrangements (AREA)
Abstract
【選択図】図1
Description
本願は、全体の参照によって本願に援用される2015年11月15日付け出願のPCT/IB2015/058821のPCT特許出願の利益を主張する。
本願は、個人用の運搬用車両に関し、特に、モーターの付いた主車輪を備える1つの車輪スケートボードとして知られる装置のような、自己平衡ボードに関する。
個人の運搬用の自己平衡車両は、技術分野において知られている。米国特許第6302230号明細書及びオーストリア特許第299826号明細書(カーメン)において記載されているように、このような車両は、典型的には、相互に離れており、間に足場を備える2個の同軸の個別回転車輪を備えており、車両の乗り手が、予定された動きの正方向に対向して立つことが可能となる。ジャイロスコープ及び加速度計センサーは、足場の方向における変化を検出し、モーター制御システムに情報を送る。モーターシステムは、いくつかの方向において車輪を回転させることにより、ある範囲内で足場の方向を水平に維持するようにプログラムされており、車両が一定速度を有している間に、車両及び乗り手の重心を調整する効果を有する。いくつかの種類において、足場に接続される直立ハンドルが存在し、横に傾けることにより、車両を更に制御する能力を乗り手に与え、車輪が異なる速度及び/又は方向において回転し車両が曲がる。
Claims (15)
- 自己平衡ボードであって、前記自己平衡ボードは、
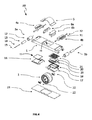
主車輪アセンブリであって、
主車輪と、
前記主車輪を駆動するモーターと、を備える前記主車輪アセンブリと、
前記主車輪アセンブリに取り付けられており、足用デッキを備えている足場と、
前記足場の前記方向を検出している少なくとも1つのセンサーと、
前記少なくとも1つのセンサーからデータを受信し、前記受信したデータに応じて前記モーターを制御するコントローラーと、
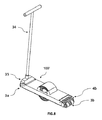
前記主車輪アセンブリの遠位の前記足場に連結される第1の補助車輪アセンブリであって、前記第1の補助車輪アセンブリは、前記足用デッキが平面に平行である時に、前記主車輪が設けられる前記平面への接触から持ち上げられている、前記第1の補助車輪アセンブリと、
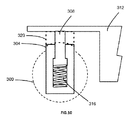
前記第1の補助車輪アセンブリの回転への抵抗を提供するべく、前記第1の補助車輪アセンブリに係合するために、前記第1の補助車輪アセンブリに対してマニュアルで移動可能である第1のブレーキ要素と、
を備える自己平衡ボード。 - 非係合位置に付勢されており、前記第1のブレーキ要素が前記第1の補助車輪アセンブリに接触する係合位置に、移動可能である第1のブレーキペダル、を更に備える、
請求項1に記載の自己平衡ボード。 - 前記第1のブレーキペダルは、機械的ヒンジによって前記足場に連結されている、
請求項2に記載の自己平衡ボード。 - 前記第1のブレーキペダルは、一体ヒンジによって前記足場に連結されている、
請求項2に記載の自己平衡ボード。 - 前記第1のブレーキ要素は、第1のブレーキパッドを備えており、前記第1のブレーキ要素は、前記第1の補助車輪アセンブリから直線的に離れており、前記第1のブレーキパッドを、前記第1の補助車輪アセンブリと接触させるために、前記第1のブレーキ要素は、前記第1の補助車輪アセンブリに対して、マニュアルで促され得る、
請求項1に記載の自己平衡ボード。 - 前記第1の補助車輪アセンブリは前記足場から離されて付勢されており、前記第1の補助車輪アセンブリが、前記第1のブレーキ要素と接触する前記第1の補助車輪アセンブリに促すときに、前記第1の補助車輪アセンブリに近位の前記足場に圧力が適用される、
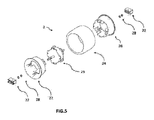
請求項1に記載の自己平衡ボード。 - 前記第1の補助車輪アセンブリは、
第1の補助車輪と、
第1の制動面と、備える、
請求項1に記載の自己平衡ボード。 - 前記第1のブレーキ要素は、前記第1の補助車輪アセンブリの回転への抵抗を提供するために、前記第1の制動面に係合する、
請求項7に記載の自己平衡ボード。 - 前記主車輪アセンブリの遠位の前記足場に連結される第2の補助車輪アセンブリであって、前記第2の補助車輪アセンブリは、前記足用デッキが平面に平行である時に、前記主車輪が設けられる前記平面への接触から持ち上げられている、前記第2の補助車輪アセンブリと、
前記第2の補助車輪アセンブリの回転への抵抗を提供するべく、前記第2の補助車輪アセンブリに係合するために、前記第2の補助車輪アセンブリに対してマニュアルで移動可能である第2のブレーキ要素と、を更に備える、
請求項1に記載の自己平衡ボード。 - 非係合位置に付勢されており、前記第2のブレーキ要素が前記第2の補助車輪アセンブリに接触する係合位置に、移動可能である第2のブレーキペダル、を更に備える、
請求項9に記載の自己平衡ボード。 - 前記第2のブレーキペダルは、機械的ヒンジによって前記足場に連結されている、
請求項10に記載の自己平衡ボード。 - 前記第2のブレーキペダルは、一体ヒンジによって前記足場に連結されている、
請求項10に記載の自己平衡ボード。 - 前記第2のブレーキ要素は、第2のブレーキパッドを備えており、前記第2のブレーキ要素は、前記第2の補助車輪アセンブリから直線的に離れており、前記第2のブレーキパッドを、前記第2の補助車輪アセンブリと接触させるために、前記第2のブレーキ要素は、前記第2の補助車輪アセンブリに対して、マニュアルで促され得る、
請求項8に記載の自己平衡ボード。 - 前記第2の補助車輪アセンブリは前記足場から離されて付勢されており、前記第2の補助車輪アセンブリが、前記第2のブレーキ要素と接触する前記第2の補助車輪アセンブリに促すときに、前記第2の補助車輪アセンブリに近位の前記足場に圧力が適用される、
請求項8に記載の自己平衡ボード。 - 前記足場に取り付けられているハンドルバー、を備える、
請求項1に記載の自己平衡ボード。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IBPCT/IB2015/058821 | 2015-11-15 | ||
| PCT/IB2015/058821 WO2017081523A1 (en) | 2015-11-15 | 2015-11-15 | Self-balancing single wheel board with anti-fall and brake safety systems |
| PCT/CN2016/105834 WO2017080530A1 (en) | 2015-11-15 | 2016-11-15 | Self-balancing board with primary wheel and distal auxiliary wheel |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018535013A true JP2018535013A (ja) | 2018-11-29 |
| JP2018535013A5 JP2018535013A5 (ja) | 2019-12-26 |
Family
ID=58694542
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018524830A Pending JP2018535013A (ja) | 2015-11-15 | 2016-11-15 | 主車輪及び遠位補助車輪を有する自己平衡ボード |
Country Status (10)
| Country | Link |
|---|---|
| US (3) | US10058765B2 (ja) |
| EP (1) | EP3374045A4 (ja) |
| JP (1) | JP2018535013A (ja) |
| KR (1) | KR20180082481A (ja) |
| CN (2) | CN206358276U (ja) |
| AU (1) | AU2016353893A1 (ja) |
| CA (1) | CA3004935A1 (ja) |
| RU (1) | RU2018121438A (ja) |
| SG (1) | SG11201803861WA (ja) |
| WO (2) | WO2017081523A1 (ja) |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10369453B2 (en) * | 2013-10-21 | 2019-08-06 | Equalia LLC | Pitch-propelled vehicle |
| US9211470B2 (en) | 2013-10-21 | 2015-12-15 | Equalia LLC. | Pitch-propelled vehicle |
| WO2017081523A1 (en) * | 2015-11-15 | 2017-05-18 | Koofy Development Limited | Self-balancing single wheel board with anti-fall and brake safety systems |
| GB2547260B (en) * | 2016-02-12 | 2019-05-15 | Artemev Timur | Motorized footwear |
| US20190256163A1 (en) * | 2017-07-27 | 2019-08-22 | Ninebot (Beijing) Tech Co., Ltd. | Roller-skating device and electric balance vehicle |
| US10682565B1 (en) | 2017-12-04 | 2020-06-16 | Flight Fins Llc | Foot lift attachments for skateboards and combinations thereof |
| US11433294B2 (en) | 2017-12-04 | 2022-09-06 | Flight Fins Llc | Foot lift attachments for skateboards and combinations thereof |
| WO2019116277A1 (en) * | 2017-12-12 | 2019-06-20 | Koofy Innovation Limited | Self-balancing board with powered auxiliary wheels |
| US20190299082A1 (en) * | 2018-03-29 | 2019-10-03 | Matthew Brett Hoover | Apparatus and method for reducing the incidence of sudden stoppage with self balancing skateboards |
| CN108609098B (zh) * | 2018-04-29 | 2019-12-27 | 周一峰 | 一种具有双重操作模式的行进装置及其控制方法 |
| CN108974212A (zh) * | 2018-04-29 | 2018-12-11 | 周峰 | 一种机器人底盘的行进装置及其控制方法 |
| WO2020142055A1 (ru) * | 2019-01-02 | 2020-07-09 | Александр Владимирович ВЛАЩИНСКИЙ | Самобалансирующийся электроскейт |
| US11230341B2 (en) * | 2019-01-22 | 2022-01-25 | Antoine M. Njeim | Nose-dive prevention device for a one-wheeled transporation device |
| US10456658B1 (en) * | 2019-02-11 | 2019-10-29 | Future Motion, Inc. | Self-stabilizing skateboard |
| US11420676B2 (en) * | 2019-03-04 | 2022-08-23 | Sk8Dogltd, Llc | Sliding kingpin assembly for use in vehicles |
| USD890280S1 (en) * | 2019-03-11 | 2020-07-14 | Future Motion, Inc. | Rider detection sensor for electric vehicle |
| US11045712B1 (en) * | 2019-04-04 | 2021-06-29 | Paul Orehek | Cushioned concave pads for self-balancing vehicles |
| US10421006B1 (en) * | 2019-05-01 | 2019-09-24 | Bowen Li | Self-balancing vehicle and structural support therein |
| KR102214780B1 (ko) * | 2019-11-07 | 2021-02-10 | 김항래 | 원휠 전동보드 |
| US11794090B2 (en) * | 2020-01-08 | 2023-10-24 | Acme Land Surf Co., LLC | Wheeled vehicle and deck for wheeled vehicle |
| US11547901B2 (en) * | 2020-07-18 | 2023-01-10 | Kazumine Kumada | Sliding balance board |
| US12005340B2 (en) | 2020-10-06 | 2024-06-11 | Future Motion, Inc. | Suspension systems for an electric skateboard |
| USD999859S1 (en) * | 2021-06-11 | 2023-09-26 | Future Motion, Inc. | Fender for electric vehicle |
| GB2622729A (en) * | 2021-06-11 | 2024-03-27 | Future Motion Inc | Composite fender for electric vehicle |
| US11840303B2 (en) * | 2021-06-11 | 2023-12-12 | Future Motion, Inc. | Suspension system for a one-wheeled vehicle |
| CN113212622A (zh) * | 2021-06-24 | 2021-08-06 | 深圳百客电子商务有限公司 | 一种平衡车及其控制方法和以平衡车为动力的卡丁车 |
| US11273364B1 (en) * | 2021-06-30 | 2022-03-15 | Future Motion, Inc. | Self-stabilizing skateboard |
| US20230054949A1 (en) * | 2021-08-20 | 2023-02-23 | Nicholas John Vitale | Cushioned footpad with reinforcing support structure |
| USD1001939S1 (en) * | 2021-10-15 | 2023-10-17 | Future Motion, Inc. | Fender for electric vehicle |
| USD1008392S1 (en) * | 2021-10-15 | 2023-12-19 | Future Motion, Inc. | Electric vehicle |
| USD1001944S1 (en) * | 2021-10-15 | 2023-10-17 | Future Motion, Inc. | Electric vehicle front |
| USD1001943S1 (en) * | 2021-10-15 | 2023-10-17 | Future Motion, Inc. | Electric vehicle |
| USD1001940S1 (en) * | 2021-10-15 | 2023-10-17 | Future Motion, Inc. | Fender for electric vehicle |
| USD1001942S1 (en) * | 2021-10-15 | 2023-10-17 | Future Motion, Inc. | Electric vehicle with fender |
| USD1001941S1 (en) * | 2021-10-15 | 2023-10-17 | Future Motion, Inc. | Rear bumper for electric vehicle |
| USD1001938S1 (en) * | 2021-10-15 | 2023-10-17 | Future Motion, Inc. | Electric vehicle with fender |
| US11299059B1 (en) | 2021-10-20 | 2022-04-12 | Future Motion, Inc. | Self-stabilizing skateboard |
| CN114715316A (zh) * | 2022-04-15 | 2022-07-08 | 安徽小龙仔儿童用品有限公司 | 一种具有保护功能的儿童滑板车 |
| CN115352564B (zh) * | 2022-09-02 | 2024-04-19 | 深圳市慧星辰科技有限公司 | 智能平衡滑板车的控制装置和方法 |
| DE102022129853A1 (de) | 2022-11-11 | 2024-05-16 | Innovated Transport Systems Ug (Haftungsbeschränkt) | Fahrzeug für einen Fahrer mit einer auf einem Boden abrollenden Kugel |
| US11890528B1 (en) | 2022-11-17 | 2024-02-06 | Future Motion, Inc. | Concave side rails for one-wheeled vehicles |
| US11890527B1 (en) * | 2023-06-28 | 2024-02-06 | Future Motion, Inc. | Latching fender for electric vehicle |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4088334A (en) * | 1977-03-25 | 1978-05-09 | Johnson Elmer E | Skateboard brake |
| JPS55104472U (ja) * | 1979-01-13 | 1980-07-21 | ||
| JP2001293126A (ja) * | 2000-04-13 | 2001-10-23 | Yoshikata Rokusha | スケーター |
| JP2003502002A (ja) * | 1999-06-04 | 2003-01-14 | デカ・プロダクツ・リミテッド・パートナーシップ | 個人用移動車両及び方法 |
| GB2407780A (en) * | 2003-11-07 | 2005-05-11 | Alan Ramsay | Exercise board or skateboard |
| CN1689894A (zh) * | 2004-04-28 | 2005-11-02 | 雅马哈发动机株式会社 | 车辆、车辆控制装置以及控制方法 |
| JP2005335677A (ja) * | 2004-04-28 | 2005-12-08 | Yamaha Motor Co Ltd | 車両、車両の制御装置および制御方法 |
| JP2006001384A (ja) * | 2004-06-16 | 2006-01-05 | Sony Corp | 不安定走行装置 |
| JP2007161198A (ja) * | 2005-12-16 | 2007-06-28 | Sony Corp | 走行装置及びその制御方法 |
| US20080242515A1 (en) * | 2006-04-28 | 2008-10-02 | Larry Richard Odien | Motorized apparatus and method for dynamic balancing exercise |
| CN202641989U (zh) * | 2012-06-29 | 2013-01-02 | 宁波小星星车业有限公司 | 滑板车 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT299826B (de) | 1970-01-28 | 1972-07-10 | Franz Dorner | Windkesselspülvorrichtung |
| US4084832A (en) | 1976-08-05 | 1978-04-18 | Unarco Industries, Inc. | Shopping cart with anti-pilferage character |
| US4084831A (en) * | 1976-08-09 | 1978-04-18 | Ayola Ngwa Akonteh | Skateboard with control unit |
| US6543564B1 (en) | 1994-05-27 | 2003-04-08 | Deka Products Limited Partnership | Balancing personal vehicle |
| US6050357A (en) * | 1995-05-31 | 2000-04-18 | Empower Corporation | Powered skateboard |
| DE29822628U1 (de) * | 1998-12-20 | 1999-03-04 | Kemmelmeier, Ludwig, 91781 Weißenburg | Rollschuh |
| CN2566908Y (zh) * | 2002-08-23 | 2003-08-20 | 陈金益 | 电动冲浪滑板车 |
| FR2845009B1 (fr) * | 2002-10-01 | 2004-11-19 | Alain Bouvet | Planche a roue a propulsion |
| US6848527B2 (en) * | 2002-10-08 | 2005-02-01 | Lucas J. Nelson | Motorized skateboard-type vehicle |
| ES2221795B1 (es) * | 2003-05-12 | 2007-07-01 | Ignacio Gomez Avila | Monopatin. |
| US8562386B2 (en) * | 2008-10-10 | 2013-10-22 | Jakks Pacific, Inc. | Mobile skateboard-shaped toy with a flywheel |
| US8807250B2 (en) | 2010-03-09 | 2014-08-19 | Shane Chen | Powered single-wheeled self-balancing vehicle for standing user |
| CN102309846A (zh) * | 2010-07-11 | 2012-01-11 | 林妙妙 | 可锻炼平衡的自行滑板 |
| CN102179039A (zh) | 2011-04-20 | 2011-09-14 | 路海燕 | 电动独轮滑板车 |
| CN202179842U (zh) | 2011-08-12 | 2012-04-04 | 路海燕 | 电动独轮滑板车 |
| US8738278B2 (en) | 2012-02-12 | 2014-05-27 | Shane Chen | Two-wheel, self-balancing vehicle with independently movable foot placement sections |
| CN103191558A (zh) * | 2013-04-11 | 2013-07-10 | 何志波 | 电动自平衡单轮滑板车 |
| CN203244742U (zh) | 2013-04-11 | 2013-10-23 | 何志波 | 电动自平衡双轮滑板车 |
| CN203244743U (zh) | 2013-04-11 | 2013-10-23 | 何志波 | 电动自平衡单轮滑板车 |
| CN205269008U (zh) | 2013-05-06 | 2016-06-01 | 未来动力公司 | 电动交通工具、电动滑板和自平衡电动交通工具 |
| US10369453B2 (en) * | 2013-10-21 | 2019-08-06 | Equalia LLC | Pitch-propelled vehicle |
| EP3043877B1 (de) * | 2013-12-06 | 2018-09-12 | Innovated Transport Systems UG Haftungsbeschränkt | Fahrzeug für die fortbewegung eines fahrers mit einer auf einem boden und in beliebige richtungen abrollenden kugel |
| CN204017335U (zh) * | 2014-05-07 | 2014-12-17 | 翁林华 | 单轮平衡滑板车 |
| CN204473001U (zh) * | 2015-02-14 | 2015-07-15 | 常州千代车业有限公司 | 滑板式平衡车 |
| WO2017081523A1 (en) * | 2015-11-15 | 2017-05-18 | Koofy Development Limited | Self-balancing single wheel board with anti-fall and brake safety systems |
| CN214209404U (zh) * | 2016-06-02 | 2021-09-17 | 未来动力公司 | 电动交通工具、自平衡电动交通工具和电动滑板 |
-
2015
- 2015-11-15 WO PCT/IB2015/058821 patent/WO2017081523A1/en active Application Filing
-
2016
- 2016-11-15 KR KR1020187015282A patent/KR20180082481A/ko unknown
- 2016-11-15 AU AU2016353893A patent/AU2016353893A1/en not_active Abandoned
- 2016-11-15 WO PCT/CN2016/105834 patent/WO2017080530A1/en active Application Filing
- 2016-11-15 CN CN201621240409.1U patent/CN206358276U/zh not_active Expired - Fee Related
- 2016-11-15 CN CN201611019577.2A patent/CN107019900A/zh active Pending
- 2016-11-15 EP EP16863706.4A patent/EP3374045A4/en not_active Withdrawn
- 2016-11-15 SG SG11201803861WA patent/SG11201803861WA/en unknown
- 2016-11-15 JP JP2018524830A patent/JP2018535013A/ja active Pending
- 2016-11-15 RU RU2018121438A patent/RU2018121438A/ru unknown
- 2016-11-15 CA CA3004935A patent/CA3004935A1/en not_active Abandoned
-
2018
- 2018-02-12 US US15/894,112 patent/US10058765B2/en active Active
- 2018-08-28 US US16/115,534 patent/US10335669B2/en active Active
-
2019
- 2019-07-01 US US16/459,597 patent/US11148037B2/en active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4088334A (en) * | 1977-03-25 | 1978-05-09 | Johnson Elmer E | Skateboard brake |
| JPS55104472U (ja) * | 1979-01-13 | 1980-07-21 | ||
| JP2003502002A (ja) * | 1999-06-04 | 2003-01-14 | デカ・プロダクツ・リミテッド・パートナーシップ | 個人用移動車両及び方法 |
| JP2001293126A (ja) * | 2000-04-13 | 2001-10-23 | Yoshikata Rokusha | スケーター |
| GB2407780A (en) * | 2003-11-07 | 2005-05-11 | Alan Ramsay | Exercise board or skateboard |
| CN1689894A (zh) * | 2004-04-28 | 2005-11-02 | 雅马哈发动机株式会社 | 车辆、车辆控制装置以及控制方法 |
| US20050241864A1 (en) * | 2004-04-28 | 2005-11-03 | Yuji Hiramatsu | Vehicle, vehicle control device and vehicle control method |
| JP2005335677A (ja) * | 2004-04-28 | 2005-12-08 | Yamaha Motor Co Ltd | 車両、車両の制御装置および制御方法 |
| JP2006001384A (ja) * | 2004-06-16 | 2006-01-05 | Sony Corp | 不安定走行装置 |
| JP2007161198A (ja) * | 2005-12-16 | 2007-06-28 | Sony Corp | 走行装置及びその制御方法 |
| US20080242515A1 (en) * | 2006-04-28 | 2008-10-02 | Larry Richard Odien | Motorized apparatus and method for dynamic balancing exercise |
| CN202641989U (zh) * | 2012-06-29 | 2013-01-02 | 宁波小星星车业有限公司 | 滑板车 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2016353893A1 (en) | 2018-05-31 |
| EP3374045A4 (en) | 2019-08-21 |
| EP3374045A1 (en) | 2018-09-19 |
| CN107019900A (zh) | 2017-08-08 |
| CA3004935A1 (en) | 2017-05-18 |
| US10058765B2 (en) | 2018-08-28 |
| US20180369685A1 (en) | 2018-12-27 |
| US11148037B2 (en) | 2021-10-19 |
| RU2018121438A (ru) | 2019-12-16 |
| WO2017080530A1 (en) | 2017-05-18 |
| RU2018121438A3 (ja) | 2020-02-12 |
| SG11201803861WA (en) | 2018-06-28 |
| WO2017081523A1 (en) | 2017-05-18 |
| KR20180082481A (ko) | 2018-07-18 |
| US20180161661A1 (en) | 2018-06-14 |
| US10335669B2 (en) | 2019-07-02 |
| CN206358276U (zh) | 2017-07-28 |
| US20190321712A1 (en) | 2019-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2018535013A (ja) | 主車輪及び遠位補助車輪を有する自己平衡ボード | |
| JP4691912B2 (ja) | 不安定走行装置 | |
| US9499228B2 (en) | Self-balancing vehicle frame | |
| JP4710934B2 (ja) | 車体構造及び同軸二輪車 | |
| JP5292286B2 (ja) | 全方向に移動可能な乗り物 | |
| KR20160117568A (ko) | 전동 유니사이클 장치 | |
| KR100857507B1 (ko) | 스텝보드 | |
| KR20180068090A (ko) | 삼륜 탑승 기구 | |
| KR101935858B1 (ko) | 안정성이 향상된 이륜 전동차 | |
| JP2006151032A (ja) | 立ち乗り式小型車両 | |
| JP6739395B2 (ja) | 走行支援器具及び走行装置 | |
| WO2019122930A1 (en) | Load balancing transportation device | |
| US9308968B2 (en) | Leg type traveling apparatus | |
| JP2008136567A (ja) | 自走式ローラーボード | |
| KR101417466B1 (ko) | 속도와 방향 제어가 가능한 헤미스피어 이동장치 | |
| JP6567753B1 (ja) | 電動二輪車 | |
| JP2011079422A (ja) | 補助動力車および補助動力車付きカート | |
| GB2597737A (en) | Motorized kick scooter | |
| JP5203368B2 (ja) | 電動車両の速度制限 | |
| JP5203368B6 (ja) | 電動車両の速度制限 | |
| JP2021132759A (ja) | 椅子移動装置 | |
| JP2019142343A (ja) | 電動駆動車 | |
| GB2569806A (en) | Support framework for a self-balancing transportation device | |
| TWM553292U (zh) | 電動滑板車 | |
| WO2004067121A1 (en) | Powered conveyance |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191114 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200915 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200929 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210518 |