JP2017191383A - 車両制御装置 - Google Patents
車両制御装置 Download PDFInfo
- Publication number
- JP2017191383A JP2017191383A JP2016079121A JP2016079121A JP2017191383A JP 2017191383 A JP2017191383 A JP 2017191383A JP 2016079121 A JP2016079121 A JP 2016079121A JP 2016079121 A JP2016079121 A JP 2016079121A JP 2017191383 A JP2017191383 A JP 2017191383A
- Authority
- JP
- Japan
- Prior art keywords
- host vehicle
- control
- collision
- road surface
- determination unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/025—Active steering aids, e.g. helping the driver by actively influencing the steering system after environment evaluation
- B62D15/0265—Automatic obstacle avoidance by steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/172—Determining control parameters used in the regulation, e.g. by calculations involving measured or detected parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0953—Predicting travel path or likelihood of collision the prediction being responsive to vehicle dynamic parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/068—Road friction coefficient
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/40—Coefficient of friction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/20—Ambient conditions, e.g. wind or rain
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Regulating Braking Force (AREA)
Abstract
Description
以下、本発明に係る車両制御装置を具体化した第1実施形態について、図面を参照しつつ説明する。本実施形態に係る制御装置は、自車両とその前方に存在する自動車等の物体との衝突を回避又は衝突被害を軽減すべく、自車両の周囲に存在する物体を検知して衝突回避制御を実行するプリクラッシュセーフティシステムとして機能する。
なお、前方物体と自車両との衝突可能性があるか否かの判定手法としては、上述した手法に限らず、例えば、特開2015−232825号公報の図4に記載された手法を用いてもよい。
以下、第2実施形態について、上記第1実施形態との相違点を中心に図面を参照しつつ説明する。本実施形態では、自車両の走行路面が低μ路であるか否かの判定手法を変更する。
以下、第3実施形態について、上記第1実施形態との相違点を中心に図面を参照しつつ説明する。本実施形態では、自動操舵制御の禁止手法を変更する。
以下、第4実施形態について、上記第1実施形態との相違点を中心に図面を参照しつつ説明する。本実施形態では、自車両の走行路面が低μ路であるか否かの判定手法を変更する。
なお、上記各実施形態は、以下のように変更して実施してもよい。
Claims (5)
- 自車両とその前方に存在する物体との衝突可能性を判定する衝突判定部と、
前記衝突判定部により衝突可能性有りと判定された場合、前記自車両と前記物体との衝突を回避するための衝突回避制御として前記自車両を操舵する自動操舵制御を実行する制御部と、
前記自車両の走行路面が低μ路であるか否かを判定する処理を行う路面判定部と、を備え、
前記制御部は、前記路面判定部により低μ路であると判定された場合、前記自動操舵制御の実行を禁止する車両制御装置(10)。 - 前記自車両の周囲の外気温度を取得する温度取得部を備え、
前記路面判定部は、前記判定する処理として、前記温度取得部により取得された外気温度が所定温度以下であるか否かを判定する処理を行い、
前記制御部は、前記路面判定部により外気温度が前記所定温度以下であると判定された場合、前記自動操舵制御の実行を禁止する請求項1に記載の車両制御装置。 - 前記自車両の走行経路の属する地域の降雪情報を取得する情報取得部を備え、
前記路面判定部は、前記判定する処理として、前記情報取得部により降雪情報が取得されたか否かを判定する処理を行い、
前記制御部は、前記路面判定部により前記降雪情報が取得されたと判定された場合、前記自動操舵制御の実行を禁止する請求項1又は2に記載の車両制御装置。 - 前記制御部は、
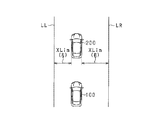
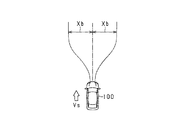
前記衝突判定部により衝突可能性有りと判定された場合、前記物体との衝突を回避するために要する前記自車両の横方向回避量を算出する回避量算出部と、
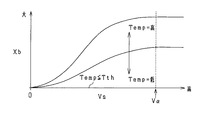
前記自車両の走行速度に基づいて、前記自動操舵制御により可能となる前記自車両の横方向回避量の最大値を算出する最大値算出部と、を含み、前記横方向回避量が前記最大値以下であることを条件として、前記自動操舵制御を実行し、
前記最大値算出部は、前記路面判定部により低μ路であると判定された場合に、前記路面判定部により低μ路でないと判定された場合に比べて、前記最大値を小さい値にする請求項1〜3のいずれか1項に記載の車両制御装置。 - 前記制御部は、前記衝突判定部により衝突可能性有りと判定された場合、前記衝突回避制御として前記自車両に制動力を付与する自動制動制御を実行し、
前記路面判定部は、前記判定する処理として、前記自動制動制御の実行により前記自車両のスリップが発生しているか否かを判定する処理を行い、
前記制御部は、前記自動制動制御の開始後において、前記路面判定部によりスリップが発生していると判定されない場合に前記自動操舵制御の実行を許可し、前記路面判定部によりスリップが発生していると判定された場合に前記自動操舵制御の実行を禁止する請求項1〜4のいずれか1項に記載の車両制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016079121A JP6460033B2 (ja) | 2016-04-11 | 2016-04-11 | 車両制御装置 |
| DE112017001962.1T DE112017001962T5 (de) | 2016-04-11 | 2017-04-07 | Fahrzeugsteuerungsapparat |
| US16/092,344 US20190143966A1 (en) | 2016-04-11 | 2017-04-07 | Vehicle control apparatus |
| PCT/JP2017/014527 WO2017179505A1 (ja) | 2016-04-11 | 2017-04-07 | 車両制御装置 |
| CN201780022604.8A CN108885840A (zh) | 2016-04-11 | 2017-04-07 | 车辆控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016079121A JP6460033B2 (ja) | 2016-04-11 | 2016-04-11 | 車両制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017191383A true JP2017191383A (ja) | 2017-10-19 |
| JP2017191383A5 JP2017191383A5 (ja) | 2018-03-29 |
| JP6460033B2 JP6460033B2 (ja) | 2019-01-30 |
Family
ID=60042415
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016079121A Active JP6460033B2 (ja) | 2016-04-11 | 2016-04-11 | 車両制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20190143966A1 (ja) |
| JP (1) | JP6460033B2 (ja) |
| CN (1) | CN108885840A (ja) |
| DE (1) | DE112017001962T5 (ja) |
| WO (1) | WO2017179505A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110040134A (zh) * | 2019-03-13 | 2019-07-23 | 重庆邮电大学 | 考虑环境因素的车辆碰撞时间计算方法 |
| JP2022159668A (ja) * | 2021-04-05 | 2022-10-18 | トヨタ自動車株式会社 | 車両衝突回避支援装置 |
| US12122339B2 (en) | 2021-08-30 | 2024-10-22 | Toyota Jidosha Kabushiki Kaisha | Collision avoidance support device for a vehicle and collision avoidance support program for a vehicle |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110403781B (zh) * | 2019-08-08 | 2021-02-09 | 山东大学 | 一种病床的原地转弯控制系统及控制方法 |
| JP7593815B2 (ja) * | 2021-01-25 | 2024-12-03 | トヨタ自動車株式会社 | 車両衝突回避支援装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000006787A (ja) * | 1998-06-18 | 2000-01-11 | Nissan Motor Co Ltd | 車両用走行制御装置 |
| JP2010198533A (ja) * | 2009-02-27 | 2010-09-09 | Nissan Motor Co Ltd | 路面情報提供装置及び路面状態判断方法 |
| JP2015154632A (ja) * | 2014-02-17 | 2015-08-24 | トヨタ自動車株式会社 | 電動車両 |
| JP2015232825A (ja) * | 2014-06-10 | 2015-12-24 | 株式会社デンソー | 衝突回避装置 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0558319A (ja) | 1991-08-27 | 1993-03-09 | Mazda Motor Corp | 車両の接触防止装置 |
| DE19650475C1 (de) * | 1996-12-05 | 1998-04-16 | Daimler Benz Ag | Fahrzeuglenkung |
| JP3319984B2 (ja) * | 1997-07-09 | 2002-09-03 | 本田技研工業株式会社 | 車両の衝突回避装置 |
| JP3525872B2 (ja) * | 2000-08-01 | 2004-05-10 | トヨタ自動車株式会社 | 車輌用自動操舵装置 |
| JP4169065B2 (ja) * | 2006-02-13 | 2008-10-22 | 株式会社デンソー | 車両制御装置 |
| US7599774B2 (en) * | 2006-03-10 | 2009-10-06 | Gm Global Technology Operations, Inc. | Method and system for adaptively compensating closed-loop front-wheel steering control |
| JP4980076B2 (ja) * | 2007-01-11 | 2012-07-18 | 富士重工業株式会社 | 車両の運転支援装置 |
| EP2085279B1 (en) * | 2008-01-29 | 2011-05-25 | Ford Global Technologies, LLC | A system for collision course prediction |
| DE102009046966B4 (de) * | 2009-11-23 | 2019-01-31 | Robert Bosch Gmbh | Verfahren zur Unterstützung des Fahrers eines Fahrzeugs |
| DE102010032929A1 (de) * | 2010-07-30 | 2012-02-02 | Lucas Automotive Gmbh | Verfahren zum Betreiben eines elektrisch steuerbaren Bremssystems |
| US8527172B2 (en) * | 2010-10-20 | 2013-09-03 | GM Global Technology Operations LLC | Vehicle collision avoidance and warning system |
| US9081387B2 (en) * | 2011-03-01 | 2015-07-14 | Continental Teves Ag & Co. Ohg | Method and device for the prediction and adaptation of movement trajectories of motor vehicles |
| US20130030651A1 (en) * | 2011-07-25 | 2013-01-31 | GM Global Technology Operations LLC | Collision avoidance maneuver through differential braking |
| JP5796632B2 (ja) * | 2011-09-26 | 2015-10-21 | トヨタ自動車株式会社 | 車両の運転支援システム |
| US9674490B2 (en) * | 2013-04-18 | 2017-06-06 | Magna Electronics Inc. | Vision system for vehicle with adjustable cameras |
| US20160193999A1 (en) * | 2013-07-19 | 2016-07-07 | Honda Motor Co., Ltd. | Vehicle travel safety device, vehicle travel safety method, and vehicle travel safety program |
| US20150100191A1 (en) * | 2013-10-09 | 2015-04-09 | Ford Global Technologies, Llc | Monitoring autonomous vehicle steering |
| JP2016079121A (ja) | 2014-10-15 | 2016-05-16 | 石原産業株式会社 | ヘテロアリールスルホンアミド系化合物又はそれらを含有する除草剤 |
| KR102350043B1 (ko) * | 2015-11-20 | 2022-01-12 | 주식회사 만도 | 자동 조향 제어 시스템 및 방법 |
| EP3458345B1 (en) * | 2016-05-15 | 2022-07-13 | Mechanical Simulation Corporation | A system and method to stabilize motorcycles |
| WO2017213119A1 (ja) * | 2016-06-06 | 2017-12-14 | 日本精工株式会社 | 電動パワーステアリング装置 |
| JP6388187B2 (ja) * | 2016-07-28 | 2018-09-12 | 日本精工株式会社 | 電動パワーステアリング装置 |
| JP6601345B2 (ja) * | 2016-08-24 | 2019-11-06 | 株式会社デンソー | 車両制御装置 |
| EP3299993A1 (en) * | 2016-09-22 | 2018-03-28 | OmniKlima AB | Method and arrangement for determining a condition of a road surface |
| US20180217050A1 (en) * | 2017-01-30 | 2018-08-02 | GM Global Technology Operations LLC | Invasive active dynamic tests to determine surface coefficient of friction |
| US11260875B2 (en) * | 2017-12-07 | 2022-03-01 | Uatc, Llc | Systems and methods for road surface dependent motion planning |
-
2016
- 2016-04-11 JP JP2016079121A patent/JP6460033B2/ja active Active
-
2017
- 2017-04-07 US US16/092,344 patent/US20190143966A1/en not_active Abandoned
- 2017-04-07 DE DE112017001962.1T patent/DE112017001962T5/de not_active Ceased
- 2017-04-07 CN CN201780022604.8A patent/CN108885840A/zh active Pending
- 2017-04-07 WO PCT/JP2017/014527 patent/WO2017179505A1/ja not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000006787A (ja) * | 1998-06-18 | 2000-01-11 | Nissan Motor Co Ltd | 車両用走行制御装置 |
| JP2010198533A (ja) * | 2009-02-27 | 2010-09-09 | Nissan Motor Co Ltd | 路面情報提供装置及び路面状態判断方法 |
| JP2015154632A (ja) * | 2014-02-17 | 2015-08-24 | トヨタ自動車株式会社 | 電動車両 |
| JP2015232825A (ja) * | 2014-06-10 | 2015-12-24 | 株式会社デンソー | 衝突回避装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110040134A (zh) * | 2019-03-13 | 2019-07-23 | 重庆邮电大学 | 考虑环境因素的车辆碰撞时间计算方法 |
| JP2022159668A (ja) * | 2021-04-05 | 2022-10-18 | トヨタ自動車株式会社 | 車両衝突回避支援装置 |
| JP7559656B2 (ja) | 2021-04-05 | 2024-10-02 | トヨタ自動車株式会社 | 車両衝突回避支援装置 |
| US12134378B2 (en) | 2021-04-05 | 2024-11-05 | Toyota Jidosha Kabushiki Kaisha | Vehicle collision avoidance assistance device |
| US12122339B2 (en) | 2021-08-30 | 2024-10-22 | Toyota Jidosha Kabushiki Kaisha | Collision avoidance support device for a vehicle and collision avoidance support program for a vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190143966A1 (en) | 2019-05-16 |
| CN108885840A (zh) | 2018-11-23 |
| JP6460033B2 (ja) | 2019-01-30 |
| WO2017179505A1 (ja) | 2017-10-19 |
| DE112017001962T5 (de) | 2018-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6507839B2 (ja) | 車両の走行制御装置 | |
| CA3002639C (en) | Parking space line detection method and device | |
| JP6363517B2 (ja) | 車両の走行制御装置 | |
| JP6222785B2 (ja) | 操舵支援装置 | |
| JP6568559B2 (ja) | 車両の走行制御装置 | |
| US10793096B2 (en) | Vehicle control device with object detection | |
| JP6363519B2 (ja) | 車両制御装置 | |
| US20150353133A1 (en) | Collision avoidance apparatus | |
| JP6152673B2 (ja) | 車線変更支援装置 | |
| JP6460033B2 (ja) | 車両制御装置 | |
| CN109204136B (zh) | 周边图像显示控制装置 | |
| US11136013B2 (en) | Vehicle control apparatus and vehicle control method | |
| US20190359215A1 (en) | Vehicle Travel Control Method and Travel Control Device | |
| WO2018008565A1 (ja) | 車両制御装置 | |
| WO2016084528A1 (ja) | 車両制御装置及び車両制御方法 | |
| US11100800B2 (en) | Collision determination apparatus and collision determination method | |
| US11667277B2 (en) | Driving assistance control apparatus and method for vehicle, and driving assistance system for vehicle | |
| JP2017027202A (ja) | 運転支援システム | |
| JP2017117344A (ja) | 走行支援装置 | |
| JP6497284B2 (ja) | 車両制御装置、及び車両制御方法 | |
| US20200166360A1 (en) | Travel obstruction detection device and vehicle navigation system | |
| JP7054327B2 (ja) | 走行支援装置 | |
| US20170203758A1 (en) | Collision avoidance apparatus | |
| WO2017179469A1 (ja) | 車両制御装置、及び車両制御方法 | |
| JP2016011088A (ja) | 車両制御装置、車両制御方法、及び、車両制御用プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180215 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181217 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6460033 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |