JP2017185177A - 縫い終わり端検知自動停止装置付きミシン - Google Patents
縫い終わり端検知自動停止装置付きミシン Download PDFInfo
- Publication number
- JP2017185177A JP2017185177A JP2016086559A JP2016086559A JP2017185177A JP 2017185177 A JP2017185177 A JP 2017185177A JP 2016086559 A JP2016086559 A JP 2016086559A JP 2016086559 A JP2016086559 A JP 2016086559A JP 2017185177 A JP2017185177 A JP 2017185177A
- Authority
- JP
- Japan
- Prior art keywords
- sewing
- sewing machine
- cloth
- needle
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000009958 sewing Methods 0.000 title claims abstract description 221
- 239000004744 fabric Substances 0.000 claims abstract description 113
- 238000001514 detection method Methods 0.000 claims description 46
- 239000000463 material Substances 0.000 claims description 15
- 238000003860 storage Methods 0.000 claims description 13
- 239000000615 nonconductor Substances 0.000 claims description 2
- 238000003825 pressing Methods 0.000 claims description 2
- 238000009966 trimming Methods 0.000 description 14
- 230000007246 mechanism Effects 0.000 description 7
- 241000282472 Canis lupus familiaris Species 0.000 description 6
- 238000005520 cutting process Methods 0.000 description 3
- 230000000994 depressogenic effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000000881 depressing effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 230000002250 progressing effect Effects 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- 238000007743 anodising Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000005034 decoration Methods 0.000 description 1
- 239000003989 dielectric material Substances 0.000 description 1
- 238000010292 electrical insulation Methods 0.000 description 1
- 239000012777 electrically insulating material Substances 0.000 description 1
- 239000011810 insulating material Substances 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000032258 transport Effects 0.000 description 1
Images







Classifications
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B35/00—Work-feeding or -handling elements not otherwise provided for
- D05B35/02—Work-feeding or -handling elements not otherwise provided for for facilitating seaming; Hem-turning elements; Hemmers
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B65/00—Devices for severing the needle or lower thread
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B69/00—Driving-gear; Control devices
- D05B69/14—Devices for changing speed or for reversing direction of rotation
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B69/00—Driving-gear; Control devices
- D05B69/22—Devices for stopping drive when sewing tools have reached a predetermined position
Abstract
Description
この場合は、被縫製生地の厚さが変化したり、表面に凹凸があったりしても可動接片がそれに柔軟に対応し、また、モータの電源に電気的に接続されている生地押えから電気的な悪影響も受けることがないため、該可動接片の破損や変形、電気的障害の発生を防いで、センサの検知性能を常に確実かつ安定よい状態に保持することができる。
この場合は、複数の被縫製生地が針糸を介して連続一体化された縫製品と各被縫製生地が個々に分断された縫製品とを選択的に得ることができ、縫製品の多様化を図ることができる。
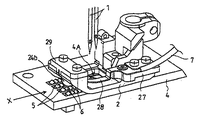
図1は本発明を実施する2本針型式の二重環縫いミシン全体の外観斜視図、図2は同2本針型式の二重環縫いミシンの要部を、針板の斜め前方から見た拡大斜視図、図3は同2本針型式の二重環縫いミシンの要部で、生地押えの一部を切り欠いた状態を針板の斜め前方から見た拡大斜視図、図4は同2本針型式の二重環縫いミシンにおける電気回路を含む概略のブロック構成図である。
2 生地押え
4 針板
4A 針落ち部
6 送り歯(生地送り装置)
23 モータ
24 生地存否検知センサ
24a 固定接点
24b 可動接片
25 電源
26 給電回路
27 センサ取付台(電気絶縁体)
28 板ばね部材
31 可変速部
32 記憶部
33 出力部
35 糸切り装置
M 二重環縫いミシン
W Tシャツ(縫製生地)
X 縫製進行方向
Claims (4)
- ミシン駆動用のモータと、該モータの作動に連動して上下往復運動する針と、該針が通過する針落ち部を有する針板と、該針板の下部に設けられて該針板上に載せ付けられた被縫製生地を所定の縫製進行方向に移送する生地送り装置と、前記被縫製生地を前記針板に押し付ける生地押えと、前記針板上に被縫製生地が存在するか否かを検知する生地存否検知センサと、を具備する縫い終わり端検知自動停止装置付きミシンであって、
前記生地存否検知センサは、前記電源に電気的に接続される前記針板により形成される固定接点と、ミシン本体を介して接地接続されて前記固定接点に対して接離可能な可動接片とから構成され、該可動接片が前記固定接点に接触することで前記給電回路を開いて前記モータへの給電を遮断してミシンの駆動を停止し、かつ、前記可動接片が前記固定接点から離間することで前記給電回路を閉じて前記モータへ給電してミシンの駆動を可能とするように構成されており、該生地存否検知センサにおける前記可動接片が、前記縫製進行方向において前記針落ち部の直前で、かつ、前記生地送り装置の送り幅内に配置されていることを特徴とする縫い終わり端検知自動停止装置付きミシン。 - 前記生地存否検知センサにおける前記可動接片は、縫製進行方向の前部が電気絶縁体を介して前記生地押えに固定され、該固定部から縫製進行方向の後方へ向けて延出された板ばね部材の自由端部に側面視で略半円状に形成されている請求項1に記載の縫い終わり端検知自動停止装置付きミシン。
- 前記モータには、該モータの回転速度を少なくとも高低二段に変更可能な可変速部が設けられており、試縫い時に前記可変速部を介して縫製対象となる被縫製生地の少なくとも縫製進行方向終端部分の回転速度が縫製進行方向始端部分の回転速度よりも低速で前記被縫製生地に適応する速度変更履歴を学習し、その学習した試縫い時の速度変更履歴を記憶する記憶部と、本縫い時に前記記憶部に記憶された前記被縫製生地に適応する速度変更履歴を読み出して前記可変速部を介してモータの回転速度を自動調整する出力部と、が備えられている請求項1又は2に記載の縫い終わり端検知自動停止装置付きミシン。
- 縫製後の針糸を切断する糸切り装置と、該糸切り装置を前記生地存否検知センサの検知動作後において糸切り作動する状態と糸切り作動を停止した状態とに切替可能な糸切り作動・非作動切替用スイッチと、を更に備えている請求項1ないし3のいずれか1項に記載の縫い終わり端検知自動停止装置付きミシン。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016086559A JP6861934B2 (ja) | 2016-04-05 | 2016-04-05 | 縫い終わり端検知自動停止装置付きミシン |
| TW106111114A TWI738755B (zh) | 2016-04-05 | 2017-03-31 | 具有偵測縫合結束端之自動停止裝置的縫紉機 |
| CN201710217093.7A CN107268197B (zh) | 2016-04-05 | 2017-04-05 | 带缝制终端检测自动停止装置的缝纫机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016086559A JP6861934B2 (ja) | 2016-04-05 | 2016-04-05 | 縫い終わり端検知自動停止装置付きミシン |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017185177A true JP2017185177A (ja) | 2017-10-12 |
| JP6861934B2 JP6861934B2 (ja) | 2021-04-21 |
Family
ID=60045953
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016086559A Active JP6861934B2 (ja) | 2016-04-05 | 2016-04-05 | 縫い終わり端検知自動停止装置付きミシン |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6861934B2 (ja) |
| CN (1) | CN107268197B (ja) |
| TW (1) | TWI738755B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112011909A (zh) * | 2019-05-31 | 2020-12-01 | 浙江中捷缝纫科技有限公司 | 缝纫机系统、缝纫机系统的控制方法及装置 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108414519B (zh) * | 2018-02-11 | 2021-01-26 | 常熟理工学院 | 一种选针器选针头位置的检测装置 |
| JP2020142041A (ja) * | 2019-03-07 | 2020-09-10 | ヤマトミシン製造株式会社 | 丸物生地のヘム縫いミシン |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS494685B1 (ja) * | 1968-05-13 | 1974-02-02 | ||
| JPS4717584U (ja) * | 1971-03-27 | 1972-10-28 | ||
| JPS5933348Y2 (ja) * | 1975-11-28 | 1984-09-17 | 蛇の目ミシン工業株式会社 | 一針縫ミシンの制御装置 |
| JPS56116489A (en) * | 1980-02-14 | 1981-09-12 | Mitsubishi Electric Corp | Stitching apparatus |
| JPS60172437U (ja) * | 1984-04-23 | 1985-11-15 | 三菱電機株式会社 | トランジスタのベ−ス駆動回路 |
| JPH0243351Y2 (ja) * | 1985-11-08 | 1990-11-19 | ||
| JPS62277993A (ja) * | 1986-05-26 | 1987-12-02 | ジューキ株式会社 | ミシンの布端検知装置 |
| JPH04240479A (ja) * | 1991-01-23 | 1992-08-27 | Mitsubishi Electric Corp | ミシン制御装置 |
| JP2640307B2 (ja) * | 1992-07-17 | 1997-08-13 | ヤマトミシン製造株式会社 | 偏平縫いミシンの返し縫い方法及びその装置 |
| US6119610A (en) * | 1998-02-27 | 2000-09-19 | Mitsubishi Denki Kabushiki Kaisha | Sewing machine controller |
| JP4022790B2 (ja) | 1998-06-26 | 2007-12-19 | 富士通株式会社 | 絶縁膜及びその形成方法 |
| JP2001046773A (ja) * | 1999-08-10 | 2001-02-20 | Juki Corp | ミシンモータの制御装置 |
| JP6278878B2 (ja) | 2014-10-27 | 2018-02-14 | 東京瓦斯株式会社 | 着用物内環境向上装置及び特定気体の警報器 |
-
2016
- 2016-04-05 JP JP2016086559A patent/JP6861934B2/ja active Active
-
2017
- 2017-03-31 TW TW106111114A patent/TWI738755B/zh active
- 2017-04-05 CN CN201710217093.7A patent/CN107268197B/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112011909A (zh) * | 2019-05-31 | 2020-12-01 | 浙江中捷缝纫科技有限公司 | 缝纫机系统、缝纫机系统的控制方法及装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI738755B (zh) | 2021-09-11 |
| JP6861934B2 (ja) | 2021-04-21 |
| TW201742965A (zh) | 2017-12-16 |
| CN107268197B (zh) | 2021-06-11 |
| CN107268197A (zh) | 2017-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI402390B (zh) | 縫紉機 | |
| JP6560913B2 (ja) | ミシン | |
| JP2017185177A (ja) | 縫い終わり端検知自動停止装置付きミシン | |
| JP4960008B2 (ja) | 玉縁縫いミシン | |
| JP6441221B2 (ja) | ミシン | |
| TWI703250B (zh) | 縫紉機及縫製裝置、以及縫製方法 | |
| JP4070164B2 (ja) | ベルトループ縫付けミシン | |
| JP3897641B2 (ja) | ミシン | |
| JP6425069B2 (ja) | ミシン | |
| JP4030864B2 (ja) | ミシンの上糸保持装置 | |
| JP2009050638A (ja) | ミシン | |
| CN109267252A (zh) | 一种缝纫机上用于连续缝制的剪线装置及方法 | |
| JP3804034B2 (ja) | テープ材送給装置 | |
| JP4336419B2 (ja) | ベルトループ縫付けミシン | |
| JP2762720B2 (ja) | ボタン付けミシン | |
| JP2001096084A (ja) | 穴かがり縫いミシン | |
| JP6374745B2 (ja) | ミシン | |
| JPS6043993B2 (ja) | ミシンの縫製装置 | |
| US20130247805A1 (en) | Upper feed device and sewing machine | |
| JP2010035672A (ja) | 玉縁縫いミシン | |
| CN105734852B (zh) | 缝纫机和缝纫机的控制方法 | |
| JPS62614Y2 (ja) | ||
| CN115506088A (zh) | 一种单双针可切换的缝纫机及其控制方法 | |
| JPS5850987A (ja) | 掬縫ミシンの縫い終りのほどけ防止作製方法並びに其の装置 | |
| JPS5910824B2 (ja) | ミシンの布制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190320 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200819 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210216 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6861934 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |