JP2017142668A - 物品搬送設備 - Google Patents
物品搬送設備 Download PDFInfo
- Publication number
- JP2017142668A JP2017142668A JP2016023764A JP2016023764A JP2017142668A JP 2017142668 A JP2017142668 A JP 2017142668A JP 2016023764 A JP2016023764 A JP 2016023764A JP 2016023764 A JP2016023764 A JP 2016023764A JP 2017142668 A JP2017142668 A JP 2017142668A
- Authority
- JP
- Japan
- Prior art keywords
- route
- transport vehicle
- article transport
- detection unit
- management area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims abstract description 150
- 230000032258 transport Effects 0.000 claims description 254
- 238000011144 upstream manufacturing Methods 0.000 claims description 30
- 238000004891 communication Methods 0.000 description 26
- 238000010586 diagram Methods 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 230000009471 action Effects 0.000 description 3
- 238000012790 confirmation Methods 0.000 description 3
- 230000001276 controlling effect Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G35/00—Mechanical conveyors not otherwise provided for
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67715—Changing the direction of the conveying path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning, or like safety means along the route or between vehicles or vehicle trains
- B61L23/08—Control, warning, or like safety means along the route or between vehicles or vehicle trains for controlling traffic in one direction only
- B61L23/14—Control, warning, or like safety means along the route or between vehicles or vehicle trains for controlling traffic in one direction only automatically operated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L25/00—Recording or indicating positions or identities of vehicles or vehicle trains or setting of track apparatus
- B61L25/02—Indicating or recording positions or identities of vehicles or vehicle trains
- B61L25/025—Absolute localisation, e.g. providing geodetic coordinates
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/04—Automatic systems, e.g. controlled by train; Change-over to manual control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G43/00—Control devices, e.g. for safety, warning or fault-correcting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G43/00—Control devices, e.g. for safety, warning or fault-correcting
- B65G43/08—Control devices operated by article or material being fed, conveyed or discharged
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/06—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for fragile sheets, e.g. glass
- B65G49/061—Lifting, gripping, or carrying means, for one or more sheets forming independent means of transport, e.g. suction cups, transport frames
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67184—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the presence of more than one transfer chamber
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67196—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the transfer chamber
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67706—Mechanical details, e.g. roller, belt
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67724—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations by means of a cart or a vehicule
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67727—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations using a general scheme of a conveying path within a factory
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/6773—Conveying cassettes, containers or carriers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67733—Overhead conveying
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L2201/00—Control methods
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0297—Wafer cassette
Abstract
【解決手段】第1検出部により物品搬送車が第1経路R1を走行して管理領域T3に進入したことが検出され、且つ、第2検出部55A又は第3検出部55Bにより選択経路R2に物品搬送車が存在することが検出されたことを条件に、制御装置は停止制御を実行し、第1検出部により物品搬送車が第1経路R1を走行して管理領域T3に進入したことが検出され、且つ、第2検出部55A又は第3検出部55Bにより選択経路R2に物品搬送車が存在することが検出されないことを条件に、制御装置は走行制御を実行する。
【選択図】図7
Description
物品搬送車は、第1の走行コースL1を走行するときや第3の走行コースL3を走行するときは、第1の信号を送信する。そして、制御装置は、第1の走行コースL1の確認エリアe1に物品搬送車が進入してその物品搬送車からの第1の信号を受信したときに、制御ゾーンd1の第1の走行コースL1や第3の走行コースL3を走行している別の物品搬送車からの第1の信号を受信することを条件に、停止制御を実行し、制御ゾーンd1の第1の走行コースL1や第3の走行コースL3を走行している別の物品搬送車からの第1の信号を受信しないことを条件に、走行制御を実行するようになっている。制御装置が、管理領域において物品搬送車をこのように制御することで、物品搬送車同士が管理領域内で衝突等することを防止している。
そのため、選択経路として、第1の走行コースと第3の走行コースとのうちの一方の走行コース(例えば、第1の走行コース)を選択している場合に、この一方の走行コース(第1の走行コース)には別の物品搬送車が存在していなくても、他方の走行コース(第3の走行コース)に別の物品搬送車が存在しているときは、制御装置は停止制御を実行し、当該別の物品搬送車が他方の走行コース(第3の走行コース)に存在しなくなるまで、物品搬送車を停止状態で待機させる。しかしながら、物品搬送車を管理領域内で待機させると、当該待機させた物品搬送車の搬送能力が低下して、設備全体の搬送効率の低下を招くことになる。そのため、このような物品搬送設備では、物品搬送車が管理領域に進入したときに当該物品搬送車が停止状態で待機する頻度を抑えて、設備の搬送効率を向上させることが望まれている。
前記第1経路を走行する前記物品搬送車が前記管理領域に進入したことを検出する第1検出部と、前記第2経路における前記管理領域内の部分に前記物品搬送車が存在していることを検出する第2検出部と、前記第3経路における前記管理領域内の部分に前記物品搬送車が存在していることを検出する第3検出部と、を更に備え、前記制御装置は、前記第1検出部により前記物品搬送車が検出され、且つ、前記第2検出部又は前記第3検出部により前記選択経路の前記物品搬送車が検出されたことを条件に、前記停止制御を実行するとともに、前記第1検出部により前記物品搬送車が検出され、且つ、前記第2検出部又は前記第3検出部により前記選択経路の前記物品搬送車が検出されないことを条件に、前記走行制御を実行する点にある。
そして、第1検出部により管理領域に進入する物品搬送車が検出され、且つ、第2検出部又は第3検出部により選択経路に別の物品搬送車の存在が検出された場合は、制御装置は、走行制御を中断して停止制御を実行して管理領域に進入した物品搬送車2を分岐部の手前に停止させる。
また、第1検出部により管理領域に進入する物品搬送車が検出され、且つ、第2検出部又は第3検出部により選択経路に別の物品搬送車の存在が検出されない場合は、制御装置は、例えば、そのまま走行制御を継続して実行して、又は、一旦停止制御を実行した後に走行制御の実行を再開して、物品搬送車を第1経路及び選択経路に沿って走行させる。
これに対して、第2制御部では、第2検出部や第3検出部の検出情報により、上述のように、作業者により第2経路や第3経路に置かれた物品搬送車についても把握することができる。
そのため、物品搬送車が分岐部近く等において、第2経路と第3経路とが互いに近いために第1経路に沿って走行するときと第2経路に沿って走行するときとで物品搬送車の位置が大きく異ならない場合でも、被検出体の位置は比較的大きく異なる。従って、この被検出体を第2検出部や第3検出部にて検出することで、物品搬送車が走行している経路を適切に検出し易い。
そして、第2経路が選択経路として選択された場合に、その選択経路である第2経路や対象経路となる第4経路において物品搬送車が検出された場合は、停止制御が実行され、これらの経路から物品搬送車が退出して物品搬送車が検出されなくなるまで待機させる。また、第3経路が選択経路として選択された場合に、その選択経路である第3経路や対象経路となる第5経路において物品搬送車が検出された場合は、停止制御が実行され、これらの経路から物品搬送車が退出して物品搬送車が検出されなくなるまで待機させる。従って、物品搬送車同士の衝突を回避できる。
このように、分岐と合流とが混在する経路において、物品搬送車同士の衝突を回避できながら設備の搬送効率の向上を図ることができる。
図1に示すように、物品搬送設備には、走行経路1に沿って走行して物品を搬送する物品搬送車2と、走行経路1に沿って設置された左右一対の走行レール3(以下、単に走行レール3と称する場合がある)と、を備えている。尚、本実施形態では、半導体基板を収容するFOUP(Front Opening Unified Pod)を物品としており、物品搬送車2は、天井から吊り下げ支持された走行レール3上を走行経路1に沿って走行してFOUPを搬送する。
2つの主経路4は、経路幅方向に並べた状態で、かつ、2重の環状となる状態で設けられている。これら2つの環状の主経路4は、物品搬送車2が同じ方向周り(時計回り)で走行する経路である。尚、図1においては、物品搬送車2の走行方向を、矢印にて示している。
第1主経路4Aは、複数の保管部Rを経由するように設定されている。第1主経路4Aを、保管部Rとの間で物品を移載するために物品搬送車2を停止させる物品移載用の経路として用い、第2主経路4Bを、物品搬送車2を連続して走行させる連続走行用の経路として用いている。
短絡経路6は、第1主経路4Aにおける一対の長辺相当部分(図1において上下方向に直線状に延びる一対の部分)の夫々に接続されている。この短絡経路6は、第1主経路4Aにおける長辺相当部分の一方から他方又は長辺相当部分の他方から一方に物品搬送車2を走行(短絡走行)させるための経路である。
分岐経路7は、第2主経路4Bと副経路5とに接続されており、第2主経路4Bから副経路5に物品搬送車2を走行させるための経路である。合流経路8は、副経路5と第2主経路4Bとに接続されており、副経路5から第2主経路4Bに物品搬送車2を走行させるための経路である。
乗継経路9は、第1主経路4Aと第2主経路4Bとに接続されており、第1主経路4Aから第2主経路4B又は第2主経路4Bから第1主経路4Aに物品搬送車2を走行させるための経路である。
次に、物品搬送車2について説明する。
尚、物品搬送車2を説明するにあたり、物品搬送車2の前後方向を走行方向と称し、物品搬送車2の横幅方向を車体横幅方向と称して説明する。また、物品搬送車2の後方から前方を見た状態で、左右方向を特定して説明する。また、走行経路1については、走行経路1に沿う方向を経路長手方向とし、その経路長手方向に対して平面視で直交する方向を経路幅方向と称して説明する。
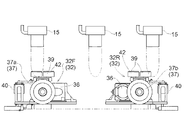
また、前方走行部32Fには、上下方向に沿う縦軸心周りで回転自在な左右一対の案内輪38が装備されている。この左右一対の案内輪38は、左右一対の走行レール3の間に位置して左右一対の走行レール3における内側面を転動するように、前方走行部32Fに装備されている。左右一対の案内輪38は、走行方向に並ぶ状態で前方走行部32Fに2組装備されている。
後方走行部32Rには、前方走行部32Fと同様に、1組の左右一対の走行輪37(以下、左右一対の後輪37bと称する場合がある)と2組の左右一対の案内輪38とが装備されている。
受電部52は車体横幅方向にスライド移動自在に支持されており、前方走行部32Fが縦軸心周りに回動するのに同期して受電部52が車体横幅方向にスライド移動するように、前方走行部32Fと受電部52とが連動機構53により連動連結されている。
また、物品搬送車2は、車体本体部31に対して前方走行部32F及び後方走行部32Rが連結部34に対して車体上下幅方向に沿う軸心周りで揺動することにより、走行経路1が円弧状であっても走行経路1に沿って走行できるようになっている。
後方走行部32Rには、前方走行部32Fと同様に、前後一対の案内補助輪39と第2モータ40とが備えられている。
そして、図2及び図3に示すように、前方走行部32Fは、第2モータ40の駆動により前後一対の案内補助輪39の位置を右案内位置(第1位置に相当)と左案内位置(第1位置より左方向に位置する第2位置に相当)とに移動させるように構成されている。右案内位置は、前後一対の案内補助輪39が前方走行部32Fの車体横幅方向の中央より右側に位置して案内レール41に対して右側から当接する位置である。左案内位置は、前後一対の案内補助輪39が前方走行部32Fの車体横幅方向の中央より左側に位置して案内レール41に対して左側から当接する位置である。
尚、案内補助輪39が、右案内位置と左案内位置とに移動自在に物品搬送車2に備えられた被案内体に相当する。
また、左右一対の案内補助輪39は、右案内位置よりも右側への移動や左案内位置よりも左側への移動が図外の規制部にて規制されている。そのため、例えば、前後一対の案内補助輪39が右案内位置に位置する状態で案内レール41により右側に押された場合でも、規制部の規制により、前後一致の案内補助輪39は右案内位置に維持される。しかし、前後一対の案内補助輪39が右案内位置に位置する状態で案内レール41により左側に押された場合は、左右一対の案内補助輪39は左案内位置に向けて移動する。
検出装置44は、走行経路1に沿って設置された被検出体48(図5等参照)を検出する装置である。被検出体48には、被検出体48が設置されている位置を示すアドレス情報が示されており、検出装置44は、被検出体48を検出するとともにその被検出体48に示されているアドレス情報を読み取るように構成されている。被検出体48は、走行経路1に沿って複数設置されており、管理領域Tの入口と出口との双方に対しても設置されている。また、検出装置44が、第1経路R1を走行する物品搬送車2が管理領域Tに進入したことを検出する第1検出部に相当する。
送受信装置45は、後述の第1制御部h1からの情報を受信するとともに、検出装置44にて読み取ったアドレス情報を第1制御部h1に送信する装置である。受信装置46は、後述の第2制御部h2からの情報を受信する装置である。
第3制御部h3は、送受信装置45にて受信した情報(第1制御部h1から受信した情報)と、受信装置46にて受信した情報(第2制御部h2から受信した情報)と、に基づいて、物品搬送車2を制御する。
そして、物品搬送車2が主経路4又は副経路5から別の経路(短絡経路6や分岐経路7等)に分岐走行する接続エリアEを、分岐エリアE1と称する。物品搬送車2が別の経路(合流経路8や乗継経路9等)に合流走行する接続エリアEを、合流エリアE2と称する。
短絡領域T1では、分岐エリアE1内において、短絡経路6の上流端が第1接続部P1で第1主経路4Aに接続され、合流エリアE2内において、短絡経路6の下流端が第2接続部P2で第1主経路4Aに接続されている。
図6に示すように、乗継領域T2の乗継経路9が第1主経路4Aから第2主経路4Bに物品搬送車2が乗り継ぐための経路の場合は、乗継領域T2では、分岐エリアE1内において、乗継経路9の上流端が第1接続部P1で第1主経路4Aに接続され、合流エリアE2内において、乗継経路9の下流端が第2接続部P2で第2主経路4Bに接続されている。
図示は省略するが、乗継領域T2の乗継経路9が第2主経路4Bから第1主経路4Aに物品搬送車2が乗り継ぐための経路の場合は、乗継経路9の上流端が第2主経路4Bに接続され、乗継経路9の下流端が第1主経路4Aに接続されている。
分岐合流領域T3では、一方の分岐エリアE1内において、合流経路8の上流端が第1接続部P1で副経路5に接続され、一方の合流エリアE2内において、合流経路8の下流端が第2接続部P2で主経路4(第2主経路4B)に接続されている。また、分岐合流領域T3では、他方の分岐エリアE1内において、分岐経路7の上流端が第3接続部P3で主経路4に接続され、他方の合流エリアE2内において、分岐経路7の下流端が第4接続部P4で副経路5に接続されている。
走行経路1は、分岐合流領域T3に対して、分岐合流領域T3の外部から分岐合流領域T3の内部に位置する副経路5の分岐部Dまで設定された第1経路R1と、副経路5の分岐部Dから分岐合流領域T3の外部まで設定された異なる2つの経路である第2経路R2及び第3経路R3と、を備えている。副経路5上の分岐部Dは、第1接続部P1より上流側に設定されており、この第1接続部P1が存在する分岐エリアE1の上流端に設定されている。
分岐合流領域T3内の副経路5上の分岐部Dにおいて、第1経路R1の下端端と第2経路R2の上流端及び第3経路R3の上流端が接続されている。分岐合流領域T3内の主経路4の分岐部Dにおいて、第6経路R6の下流端と第4経路R4の上流端及び第5経路R5の上流端が接続されている。
分岐合流領域T3内の第2接続部P2において、第2経路R2の中間と第4経路R4の中間とが接続されており、この第2接続部P2より下流側の経路では第2経路R2と第4経路R4との双方で共用している。分岐合流領域T3内の第4接続部P4において、第3経路R3の中間と第5経路R5の中間とが接続されており、この第4接続部P4より下流側の経路では第3経路R3と第5経路R5との双方で経路を共用している。
案内レール41は、分岐合流領域T3内(通信エリアCは除く)において、第2経路R2、第3経路R3、第4経路R4及び第5経路R5に沿って配置されている。案内レール41は、第1接続部P1及び第3接続部P3において分岐し、第2接続部P2及び第4接続部P4において合流するように配設されている。
図7に示すように、第1経路R1は、副経路5における分岐部Dから上流側に延びる部分により形成されている。第2経路R2は、副経路5における分岐部Dから第1接続部P1までと、合流経路8と、主経路4における第2接続部P2から下流側に所定距離だけ延びる部分と、により形成されている。第3経路R3は、副経路5における分岐部Dから下流側に延びる部分により形成されている。第4経路R4は、主経路4における分岐部Dから下流側に延びる部分により形成されている。第5経路R5は、主経路4における分岐部Dから第3接続部P3までと、分岐経路7と、副経路5における第4接続部P4から下流側に延びる部分と、により形成されている。第6経路R6は、主経路4における分岐部Dから上流側に延びる部分により形成されている。
図5に示すように、第1経路R1は、第1主経路4Aにおける分岐部Dから上流側に延びる部分により形成されている。第2経路R2は、第1主経路4Aにおける分岐部Dから下流側に延びる部分により形成されている。第3経路R3は、第1主経路4Aにおける分岐部Dから第1接続部P1までと、短絡経路6と、第1主経路4Aにおける第2接続部P2から下流側に延びる部分と、により形成されている。第7経路R7は、第1主経路4Aにおける第2接続部P2から上流側及び下流側に延びる部分により形成されている。
図6に示すように、第1経路R1は、第1主経路4Aにおける分岐部Dから上流側に延びる部分により形成されている。第2経路R2は、第1主経路4Aにおける分岐部Dから下流側に延びる部分により形成されている。第3経路R3は、第1主経路4Aにおける分岐部Dから第1接続部P1までと、乗継経路9と、第2主経路4Bにおける第2接続部P2から下流側に延びる部分と、により形成されている。第7経路R7は、第2主経路4Bにおける第2接続部P2から上流側及び下流側に延びる部分により形成されている。
図5〜図7に示すように、検出体55としては、案内レール41の右方向に設置されて右案内位置に位置する案内補助輪39を検出する第1検出体55aと、案内レール41の左方向に設置されて左案内位置に位置する案内補助輪39を検出する第2検出体55bと、が備えられている。検出体55は、被検出部42が発する磁気を検知する複数のマグネットセンサにて構成されている。
第2制御部h2は、第1検出体55a及び第2検出体55bの検出情報に基づいて、管理領域Tに物品搬送車2が存在すると判断した場合に、管理領域Tにおいて物品搬送車2が存在する経路を示す情報を通信装置56から送信するように構成されている。
図6に示すように、乗継領域T2内では、第2経路R2と、第3経路R3における合流エリアE2内に位置する部分と、に沿って第1検出体55aが設置されている。また、乗継領域T2内では、第3経路R3における分岐エリアE1に位置する部分と、第7経路R7と、に沿って第2検出体55bが設置されている。
図7に示すように、分岐合流領域T3内では、第2経路R2及び第5経路R5に沿って第1検出体55aが設置されている。また、分岐合流領域T3内では、第3経路R3及び第4経路R4に沿って第2検出体55bが設置されている。
第3経路R3に沿って設置されている第2検出体55b(又は第1検出体55aと第2検出体55bとの双方)は、第3経路R3における分岐合流領域T3に内の部分に物品搬送車2が存在していることを検出する第3検出部55Bに相当する。この第3検出部55Bは、第3経路R3に沿って設置され且つ左案内位置に位置する案内補助輪39を検出する第3検出装置である。
また、第5経路R5に沿って設置されている第1検出体55aも、第3検出部55Bに相当する。つまり、分岐合流領域T3においては、第3検出部55Bは、第3経路R3における分岐合流領域T3内の部分に加えて第5経路R5における分岐合流領域T3内の部分に物品搬送車2が存在していることを検出する。
図11に示すように、物品搬送設備は、物品搬送車2を制御する制御装置Hを備えている。
この制御装置Hは、第1制御部h1と、第2制御部h2と、第3制御部h3と、を備えている。第1制御部h1は、分岐合流領域T3等を含む走行経路1全体における物品搬送車2の走行を制御するための制御部である。第2制御部h2は、短絡領域T1、乗継領域T2及び分岐合流領域T3における物品搬送車2の走行を制御するための制御部であり、各領域の夫々に対応するように複数設けられている。第1制御部h1及び第2制御部h2は、例えば、床面上等に移動しないように固定状態で設置されている。第3制御部h3は、走行経路1を走行する物品搬送車2の夫々に設けられている。
具体的には、例えば、副経路5(第1経路R1)を走行して分岐合流領域T3に進入する場合、分岐エリアE1では第2経路R2と第3経路R3との2つの経路がある。走行制御では、目標とする停止位置に応じて、第2経路R2と第3経路R3とのうちの一方の経路を選択経路として選択し、物品搬送車2が第1経路R1及び選択経路(第2経路R2又は第3経路R3)を走行するように物品搬送車2を制御する。
また、主経路4(第6経路R6)を走行して分岐合流領域T3に進入する場合、分岐エリアE1では第4経路R4と第5経路R5との2つの経路がある。走行制御では、目標とする停止位置に応じて、第4経路R4と第5経路R5とのうちの一方の経路を選択経路として選択し、物品搬送車2が第6経路R6及び選択経路(第4経路R4又は第5経路R5)を走行するように物品搬送車2を制御する。
つまり、目標停止位置に物品搬送車2を走行させる走行制御は、管理領域Tにおいて物品搬送車2を第1経路R1及び選択経路に沿って走行させる制御である。
このように、第1制御部h1は、管理領域T内における第2経路R2及び第3経路R3の双方に物品搬送車2が存在していないと判断した場合は、第3制御部h3に第1許可情報を送信する。また、第1制御部h1は、管理領域T内における第2経路R2又は第3経路R3の少なくとも一方に物品搬送車2が存在すると判断した場合は、第3制御部h3に第1禁止情報を送信する。
このように、第2制御部h2は、検出装置44により管理領域Tに進入した物品搬送車2が検出され、且つ、第2検出部55A及び第3検出部55Bにより選択経路の物品搬送車2が検出されないことを条件に、第3制御部h3に第2許可情報を送信する。
このように、第2制御部h2は、検出装置44により管理領域Tに進入した物品搬送車2が検出され、且つ、第2検出部55A又は第3検出部55Bにより選択経路の物品搬送車2が検出されたことを条件に、第3制御部h3に第2禁止情報を送信する。
つまり、分岐合流領域T3に対応して設置されている第2制御部h2は、検出装置44により管理領域Tに進入した物品搬送車2が検出され、且つ、第2検出部55A及び第3検出部55Bにより選択経路と対象経路との少なくとも一方で物品搬送車2が検出されたことを条件に、第3制御部h3に第2禁止情報を送信する。また、分岐合流領域T3に対応して設置されている第2制御部h2は、検出装置44により管理領域Tに進入した物品搬送車2が検出され、且つ、第2検出部55A及び第3検出部55Bにより選択経路と対象経路との双方で物品搬送車2が検出されないことを条件に、第3制御部h3に第2禁止情報を送信する。
このように、第3制御部h3は、第1走行の場合、第1許可情報及び第2許可情報の受信状況に関わらず、第2禁止情報を受信していることを条件に停止制御を実行し、且つ、第2許可情報を受信していることを条件に走行制御を実行する。(図12参照)
また、第2制御部h2は、検出体55の検出対象となる経路が、第2経路R2と第3経路R3とに代えて第3経路R3と第7経路R7となる以外は、第1走行の場合と同様に、第2許可情報や第2禁止情報を第3制御部h3に送信する。
そして、第3制御部h3は、第2走行の場合、第1禁止情報と第2禁止情報とのうちの少なくとも一方の情報を受信していることを条件に停止制御を実行し、且つ、第1許可情報と第2許可情報とを双方を受信していることを条件に走行制御を実行する。(図13参照)
(1)上記実施形態では、被案内体の位置を検出したが、物品搬送車の別の部分、例えば、走行部の基枠等を検出するようにしてもよい。
また、第1検出部を、物品搬送車に備えた検出装置にて構成したが、第1検出部を、地上側に設置(例えば、走行レールに支持される状態で設置)して物品搬送車を検出するようにしてもよい。
例えば、第1経路と第2経路及び第3経路との分岐部を、2つの経路が接続される接続部(例えば、副経路と合流経路とが接続される第1接続部)と同じ位置に設定してもよい。具体的には、分岐部を第1接続部と同じ位置に設定した場合に、第1経路を、副経路における第1接続部(分岐部)から上流側に延びる部分により形成し、第2経路を、合流経路の第1接続部(分岐部)から下流側に延びる部分により形成し、第3経路を、副経路における第1接続部(分岐部)から下流側に延びる部分により形成することが考えられる。この場合、例えば、第2経路を走行する物品搬送車の走行軌跡と第3経路を走行する物品搬送車の走行軌跡とが重ならないように第2経路及び第3経路を設定してもよい。このように第2経路及び第3経路を設定することで、第3経路の上流端に別の物品搬送車が停止していたとしても、この別の物品搬送車に接触することなく、管理領域に進入した物品搬送車が第3経路を走行でき、また、第2経路の上流端に別の物品搬送車が停止していたとしても、この別の物品搬送車に接触することなく、管理領域に進入した物品搬送車が第3経路を走行できる。
具体的には、分岐部を第1接続部より下流側に設定した場合では、副経路の第1接続部より下流側(副経路の円弧状の部分)と、合流経路の第1接続部より下流側(合流経路の中間部分)と、に分岐部が設定される。そして、第1経路を、副経路における第1接続部から上流側に延びる部分と、副経路における第1接続部から分岐部までの部分と、合流経路における第1接続部から分岐部までの部分と、により形成する。また、第2経路を、合流経路の分岐部から下流側に延びる部分により形成し、第3経路を、副経路における分岐部から下流側に延びる部分により形成することが考えられる。
また、上記実施形態では、分岐エリアと合流エリアとが連続するようにこれらのエリアを設定(ガイドレールを設置)したが、分岐エリアと合流エリアとが離れるようにこれらのエリアを設定してもよい。ちなみに、分岐エリアと合流エリアとを離した場合において、分岐エリアと合流エリアとの間に位置する領域も管理領域に含むようにしてもよく、また、分岐エリアと合流エリアとを別の管理領域としてもよい。
2 物品搬送車
44 検出装置(第1検出部)
55A 第2検出部
55B 第3検出部
D 分岐部
H 制御装置
h1 第1制御部
h2 第2制御部
h3 第3制御部
T 管理領域
R1 第1経路
R2 第2経路
R3 第3経路
R4 第4経路
R5 第5経路
Claims (4)
- 走行経路に沿って走行して物品を搬送する物品搬送車と、前記物品搬送車を制御する制御装置と、を備え、
前記走行経路は、管理領域の外部から前記管理領域の内部に位置する分岐部まで設定された第1経路と、前記分岐部から前記管理領域の外部まで設定された異なる2つの経路である第2経路及び第3経路と、を備え、
前記管理領域内の前記分岐部において、前記第1経路の下流端と前記第2経路の上流端及び前記第3経路の上流端とが接続され、
前記制御装置は、前記第2経路と前記第3経路とのうちの一方を選択経路として選択して、前記物品搬送車を前記第1経路及び前記選択経路に沿って走行させる走行制御と、前記管理領域に進入した前記物品搬送車を前記第1経路に停止させる停止制御と、を実行する物品搬送設備であって、
前記第1経路を走行する前記物品搬送車が前記管理領域に進入したことを検出する第1検出部と、前記第2経路における前記管理領域内の部分に前記物品搬送車が存在していることを検出する第2検出部と、前記第3経路における前記管理領域内の部分に前記物品搬送車が存在していることを検出する第3検出部と、を更に備え、
前記制御装置は、
前記第1検出部により前記物品搬送車が検出され、且つ、前記第2検出部又は前記第3検出部により前記選択経路の前記物品搬送車が検出されたことを条件に、前記停止制御を実行するとともに、
前記第1検出部により前記物品搬送車が検出され、且つ、前記第2検出部又は前記第3検出部により前記選択経路の前記物品搬送車が検出されないことを条件に、前記走行制御を実行する物品搬送設備。 - 前記制御装置が、第1制御部と、第2制御部と、第3制御部と、を備え、
前記第1制御部は、前記走行経路を走行する前記物品搬送車から送信される当該物品搬送車の走行位置を示す位置情報に基づいて前記物品搬送車の位置を把握し、前記管理領域内における前記第2経路及び前記第3経路の双方に前記物品搬送車が存在していないと判断した場合は、前記第3制御部に第1許可情報を送信し、前記管理領域内における前記第2経路又は前記第3経路の少なくとも一方に前記物品搬送車が存在すると判断した場合は、前記第3制御部に第1禁止情報を送信し、
前記第2制御部は、前記第1検出部により前記物品搬送車が検出され、且つ、前記第2検出部及び前記第3検出部により前記選択経路の前記物品搬送車が検出されないことを条件に、前記第3制御部に第2許可情報を送信し、前記第1検出部により前記物品搬送車が検出され、且つ、前記第2検出部又は前記第3検出部により前記選択経路の前記物品搬送車が検出されたことを条件に、前記第3制御部に第2禁止情報を送信し、
前記第3制御部は、前記管理領域の前記物品搬送車の制御については、前記第1許可情報の受信状況に関わらず、前記第2禁止情報を受信していることを条件に前記停止制御を実行し、且つ、前記第2許可情報を受信していることを条件に前記走行制御を実行する請求項1記載の物品搬送設備。 - 上下方向に見て前記物品搬送車の走行方向に対して交差する方向を横方向とし、前記横方向における一方向を横第1方向、前記横方向における他方向を横第2方向として、
前記第2経路は、下流側に向かうに従って前記第3経路に対して前記横第1方向に離れ、
前記分岐部において分岐するとともに前記第1経路、前記第2経路及び前記第3経路の夫々に沿って配置される案内レールを備え、
前記物品搬送車は、第1位置とこの第1位置より前記横第2方向側に位置する第2位置とに移動自在な被案内体を備えて、前記被案内体が前記第1位置に位置して前記案内レールに対して前記横第1方向側から接触しながら前記物品搬送車が走行することより前記第1経路から前記第2経路に移動するように案内され、前記被案内体が前記第2位置に位置して前記案内レールに対して前記横第2方向側から接触しながら前記物品搬送車が走行することにより前記第1経路から前記第3経路に移動するように案内され、
前記第2検出部は、前記第2経路に沿って設置され且つ前記第1位置に位置する前記被案内体を検出する第2検出装置であり、
前記第3検出部は、前記第3経路に沿って設置され且つ前記第2位置に位置する前記被案内体を検出する第3検出装置である請求項2記載の物品搬送設備。 - 前記走行経路は、前記管理領域の外部から前記第2経路における前記管理領域内の部分に合流する第4経路と、前記管理領域の外部から前記第3経路における前記管理領域内の部分に合流する第5経路と、を更に備え、
前記第2検出部は、前記第2経路における前記管理領域内の部分に加えて前記第4経路における前記管理領域内の部分に前記物品搬送車が存在していることを検出し、
前記第3検出部は、前記第3経路における前記管理領域内の部分に加えて前記第5経路における前記管理領域内の部分に前記物品搬送車が存在していることを検出し、
前記第4経路と前記第5経路とのうち前記選択経路に合流する経路を対象経路として、
前記制御装置は、
前記第1検出部により前記物品搬送車が検出され、且つ、前記第2検出部及び前記第3検出部により前記選択経路及び前記対象経路の少なくとも一方で前記物品搬送車が検出されたことを条件に、前記停止制御を実行するとともに、
前記第1検出部により前記物品搬送車が検出され、且つ、前記第2検出部及び前記第3検出部により前記選択経路及び前記対象経路の双方で前記物品搬送車が検出されないことを条件に、前記走行制御を実行する請求項1〜3のいずれか1項に記載の物品搬送設備。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016023764A JP6613941B2 (ja) | 2016-02-10 | 2016-02-10 | 物品搬送設備 |
| TW106103780A TWI705034B (zh) | 2016-02-10 | 2017-02-06 | 物品搬送設備 |
| KR1020170016743A KR102466841B1 (ko) | 2016-02-10 | 2017-02-07 | 물품 반송 설비 |
| US15/428,496 US9934993B2 (en) | 2016-02-10 | 2017-02-09 | Article transport facility |
| CN201710073743.5A CN107055019B (zh) | 2016-02-10 | 2017-02-10 | 物品搬运设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016023764A JP6613941B2 (ja) | 2016-02-10 | 2016-02-10 | 物品搬送設備 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017142668A true JP2017142668A (ja) | 2017-08-17 |
| JP6613941B2 JP6613941B2 (ja) | 2019-12-04 |
Family
ID=59497951
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016023764A Active JP6613941B2 (ja) | 2016-02-10 | 2016-02-10 | 物品搬送設備 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9934993B2 (ja) |
| JP (1) | JP6613941B2 (ja) |
| KR (1) | KR102466841B1 (ja) |
| CN (1) | CN107055019B (ja) |
| TW (1) | TWI705034B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019043716A (ja) * | 2017-08-31 | 2019-03-22 | 株式会社ダイフク | 物品搬送設備 |
| WO2021241046A1 (ja) * | 2020-05-27 | 2021-12-02 | 村田機械株式会社 | 台車システム、及び台車制御方法 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7091040B2 (ja) * | 2017-09-07 | 2022-06-27 | 株式会社ダイフク | 搬送システム |
| JP6825532B2 (ja) * | 2017-10-12 | 2021-02-03 | 株式会社ダイフク | 搬送システム |
| JP6863329B2 (ja) * | 2018-04-13 | 2021-04-21 | 村田機械株式会社 | 走行車システム及び走行車の制御方法 |
| US11791186B2 (en) * | 2018-05-31 | 2023-10-17 | Murata Machinery, Ltd. | Conveyance system |
| EP3599126B1 (de) * | 2018-07-25 | 2021-11-10 | B&R Industrial Automation GmbH | Verfahren zum betreiben eines langstatorlinearmotors mit weiche |
| KR102303109B1 (ko) * | 2019-07-05 | 2021-09-15 | 세메스 주식회사 | 반송체 제어 장치 및 이를 구비하는 반송체 제어 시스템 |
| KR102343620B1 (ko) * | 2019-12-03 | 2021-12-24 | 세메스 주식회사 | 캐리어 이송 장치를 구비하는 캐리어 이송 시스템 |
| KR102459085B1 (ko) | 2021-04-09 | 2022-10-26 | 주식회사 에스에프에이 | 반송 시스템을 위한 합류구간 제어장치 및 그 장치의 구동방법, 그리고 반송 시스템 |
| CN116880491A (zh) * | 2023-07-21 | 2023-10-13 | 弥费科技(上海)股份有限公司 | 用于amhs搬运小车的防撞控制装置、系统及方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013108501A1 (ja) * | 2012-01-17 | 2013-07-25 | 村田機械株式会社 | 走行車システム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6032785A (en) * | 1998-06-09 | 2000-03-07 | Ocs-Intellitrak, Inc. | Overhead conveyor system |
| JP2000250628A (ja) * | 1999-02-26 | 2000-09-14 | Matsushita Electric Ind Co Ltd | 無人搬送車の走行制御方法 |
| JP3929195B2 (ja) * | 1999-03-03 | 2007-06-13 | 本田技研工業株式会社 | 移動体使用の搬送設備 |
| KR100699271B1 (ko) * | 2005-11-22 | 2007-03-28 | 삼성전자주식회사 | 이송장치 |
| JP5686501B2 (ja) * | 2009-03-27 | 2015-03-18 | 株式会社ダイフク | 物品搬送設備 |
| JP5472209B2 (ja) * | 2011-05-31 | 2014-04-16 | 株式会社ダイフク | 物品搬送設備 |
| KR101504146B1 (ko) * | 2013-07-24 | 2015-03-19 | 주식회사 에스에프에이 | 반송시스템 |
-
2016
- 2016-02-10 JP JP2016023764A patent/JP6613941B2/ja active Active
-
2017
- 2017-02-06 TW TW106103780A patent/TWI705034B/zh active
- 2017-02-07 KR KR1020170016743A patent/KR102466841B1/ko active IP Right Grant
- 2017-02-09 US US15/428,496 patent/US9934993B2/en active Active
- 2017-02-10 CN CN201710073743.5A patent/CN107055019B/zh active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013108501A1 (ja) * | 2012-01-17 | 2013-07-25 | 村田機械株式会社 | 走行車システム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019043716A (ja) * | 2017-08-31 | 2019-03-22 | 株式会社ダイフク | 物品搬送設備 |
| WO2021241046A1 (ja) * | 2020-05-27 | 2021-12-02 | 村田機械株式会社 | 台車システム、及び台車制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20170094502A (ko) | 2017-08-18 |
| TWI705034B (zh) | 2020-09-21 |
| TW201730076A (zh) | 2017-09-01 |
| CN107055019A (zh) | 2017-08-18 |
| US9934993B2 (en) | 2018-04-03 |
| KR102466841B1 (ko) | 2022-11-11 |
| JP6613941B2 (ja) | 2019-12-04 |
| CN107055019B (zh) | 2020-09-22 |
| US20170229333A1 (en) | 2017-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6613941B2 (ja) | 物品搬送設備 | |
| KR102408175B1 (ko) | 물품 반송 설비 | |
| JP6520797B2 (ja) | 物品搬送設備 | |
| TWI772404B (zh) | 物品搬送設備 | |
| JP6278341B2 (ja) | 物品搬送設備 | |
| JP6620707B2 (ja) | 物品搬送設備 | |
| JP2017120510A (ja) | 物品搬送設備 | |
| JP6863224B2 (ja) | 車両 | |
| JP2010228673A (ja) | 物品搬送設備 | |
| JP2016184690A (ja) | 物品搬送設備 | |
| KR101407417B1 (ko) | 반송 시스템 | |
| TWI745605B (zh) | 物品搬送設備 | |
| JP7327174B2 (ja) | 物品搬送設備 | |
| JP2019049447A (ja) | 検査システム | |
| JP2014238685A (ja) | 無人搬送車 | |
| JP5212228B2 (ja) | 無人搬送システム | |
| JP2023108873A (ja) | 物品搬送設備 | |
| JP2006145260A (ja) | 導電線敷設位置検出装置 | |
| JP2015225611A (ja) | 無人搬送車およびその制御装置ならびに制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180208 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181121 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190830 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191008 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191021 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6613941 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |