JP2017124071A - 電子機器、システム、提示方法、提示プログラム、及び記録媒体 - Google Patents
電子機器、システム、提示方法、提示プログラム、及び記録媒体 Download PDFInfo
- Publication number
- JP2017124071A JP2017124071A JP2016005804A JP2016005804A JP2017124071A JP 2017124071 A JP2017124071 A JP 2017124071A JP 2016005804 A JP2016005804 A JP 2016005804A JP 2016005804 A JP2016005804 A JP 2016005804A JP 2017124071 A JP2017124071 A JP 2017124071A
- Authority
- JP
- Japan
- Prior art keywords
- swing
- unit
- user
- time
- swing analysis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


































Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/36—Training appliances or apparatus for special sports for golf
- A63B69/3623—Training appliances or apparatus for special sports for golf for driving
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0003—Analysing the course of a movement or motion sequences during an exercise or trainings sequence, e.g. swing for golf or tennis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1121—Determining geometric values, e.g. centre of rotation or angular range of movement
- A61B5/1122—Determining geometric values, e.g. centre of rotation or angular range of movement of movement trajectories
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6887—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient mounted on external non-worn devices, e.g. non-medical devices
- A61B5/6895—Sport equipment
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0003—Analysing the course of a movement or motion sequences during an exercise or trainings sequence, e.g. swing for golf or tennis
- A63B24/0006—Computerised comparison for qualitative assessment of motion sequences or the course of a movement
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/36—Training appliances or apparatus for special sports for golf
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0619—Displays, user interfaces and indicating devices, specially adapted for sport equipment, e.g. display mounted on treadmills
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/20—Movements or behaviour, e.g. gesture recognition
- G06V40/23—Recognition of whole body movements, e.g. for sport training
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0619—Displays, user interfaces and indicating devices, specially adapted for sport equipment, e.g. display mounted on treadmills
- A63B2071/0658—Position or arrangement of display
- A63B2071/0661—Position or arrangement of display arranged on the user
- A63B2071/0663—Position or arrangement of display arranged on the user worn on the wrist, e.g. wrist bands
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0619—Displays, user interfaces and indicating devices, specially adapted for sport equipment, e.g. display mounted on treadmills
- A63B2071/0658—Position or arrangement of display
- A63B2071/0661—Position or arrangement of display arranged on the user
- A63B2071/0666—Position or arrangement of display arranged on the user worn on the head or face, e.g. combined with goggles or glasses
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/30—Speed
- A63B2220/34—Angular speed
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/40—Acceleration
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/803—Motion sensors
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/83—Special sensors, transducers or devices therefor characterised by the position of the sensor
- A63B2220/833—Sensors arranged on the exercise apparatus or sports implement
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/50—Wireless data transmission, e.g. by radio transmitters or telemetry
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2218/00—Aspects of pattern recognition specially adapted for signal processing
- G06F2218/12—Classification; Matching
Abstract
【課題】スイングのタイプを客観的かつ簡潔にユーザーへ提示することのできる電子機器、システム、提示方法、提示プログラム、記録媒体を提供する。
【解決手段】本適用例に係る電子機器は、予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示する提示部を含む。
【選択図】図26
【解決手段】本適用例に係る電子機器は、予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示する提示部を含む。
【選択図】図26
Description
本発明は、電子機器、システム、提示方法、提示プログラム、及び記録媒体に関する。
特許文献1には、モーションセンサーを用いてスイング解析を行い、処理結果を文字やグラフ、その他の画像として表示する運動解析システムが開示されている。
しかしながら、特許文献1には、スイングの過程をユーザーへ通知する具体的な構成については開示されていない。因みに、スイングの軌跡(例えばゴルフクラブのヘッドの軌跡)を表示する解析装置は既に提案されているが、軌跡のみからユーザーが自分のスイングのタイプを客観的に把握することは極めて難しい。
本発明は、以上のような問題点に鑑みてなされたものであり、本発明のいくつかの態様によれば、スイングのタイプを客観的かつ簡潔にユーザーへ提示することのできる電子機器、システム、提示方法、提示プログラム、記録媒体を提供する。
なお、本明細書でいう「スイングのタイプ」とは、スイングの遷移の仕方(スイングの時間変化パターン)によって分類されるスイングタイプのことを指す。
本発明は前述の課題の少なくとも一部を解決するためになされたものであり、以下の態様または適用例として実現することが可能である。
[適用例1]
本適用例に係る電子機器は、慣性センサーの出力を用いて、予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示する提示部を含む。
本適用例に係る電子機器は、慣性センサーの出力を用いて、予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示する提示部を含む。
本適用例に係る電子機器によれば、複数のタイミングの各々において打撃部の属していた領域の識別データが時系列で(すなわち複数のタイミングが到来した順序で)提示されるので、ユーザーは、自分のスイングのタイプを識別データの配列パターンとして把握することができる。
[適用例2]
本適用例において、前記提示部は、前記識別データを時系列に前記ユーザーへ提示してもよい。
本適用例において、前記提示部は、前記識別データを時系列に前記ユーザーへ提示してもよい。
[適用例3]
本適用例に係る電子機器において、前記複数の領域は、前記運動具の基本姿勢を示す第1仮想面に基づいて設定されてもよい。
本適用例に係る電子機器において、前記複数の領域は、前記運動具の基本姿勢を示す第1仮想面に基づいて設定されてもよい。
従って、本適用例に係る電子機器は、運動具の基本姿勢を基準としてスイングのタイプを提示することができる。
[適用例4]
本適用例に係る電子機器において、前記第1仮想面は、打球の目標方向に沿った第1軸と、バックスイングの開始前における前記運動具の長手方向に沿った第2軸と、に基づいて特定される面であってもよい。
本適用例に係る電子機器において、前記第1仮想面は、打球の目標方向に沿った第1軸と、バックスイングの開始前における前記運動具の長手方向に沿った第2軸と、に基づいて特定される面であってもよい。
従って、本適用例に係る電子機器は、バックスイングの開始前における運動具の基本姿勢と、打球の目標方向とを基準としてスイングのタイプを提示することができる。
[適用例5]
本適用例に係る電子機器において、前記複数の領域は、前記第1仮想面と、前記ユーザーの肩付近を通る第2仮想面とに基づいて設定されてもよい。
本適用例に係る電子機器において、前記複数の領域は、前記第1仮想面と、前記ユーザーの肩付近を通る第2仮想面とに基づいて設定されてもよい。
従って、本適用例に係る電子機器は、バックスイングの開始前における運動具の基本姿勢と、打球の目標方向と、ユーザーの基本姿勢とを基準としてスイングのタイプを提示することができる。
[適用例6]
本適用例に係る電子機器において、前記第2仮想面は、前記第1軸を含み前記第1仮想面と所定角度をなす面であってもよい。
本適用例に係る電子機器において、前記第2仮想面は、前記第1軸を含み前記第1仮想面と所定角度をなす面であってもよい。
従って、本適用例に係る電子機器は、第1仮想面及び第2仮想面で挟まれたゾーン(Vゾーン)を基準としてスイングのタイプを提示することができる。
[適用例7]
本適用例に係る電子機器において、前記第2仮想面は、前記第1仮想面と並行な平面であってもよい。
本適用例に係る電子機器において、前記第2仮想面は、前記第1仮想面と並行な平面であってもよい。
従って、本適用例に係る電子機器は、第1仮想面及び第2仮想面で挟まれたゾーン(パラレルゾーン)を基準としてスイングのタイプを提示することができる。
[適用例8]
本適用例に係る電子機器において、前記提示部は、前記識別データと共に前記第1仮想面及び前記第2仮想面を前記ユーザーへ提示してもよい。
本適用例に係る電子機器において、前記提示部は、前記識別データと共に前記第1仮想面及び前記第2仮想面を前記ユーザーへ提示してもよい。
従って、本適用例に係る電子機器は、スイングのタイプと第1仮想面及び第2仮想面との関係をユーザーに確認させることができる。
[適用例9]
本適用例に係る電子機器において、前記提示部は、前記識別データと共に前記スイングの軌跡を前記ユーザーへ提示してもよい。
本適用例に係る電子機器において、前記提示部は、前記識別データと共に前記スイングの軌跡を前記ユーザーへ提示してもよい。
従って、本適用例に係る電子機器は、スイングのタイプと共にスイングの軌跡をユーザーに確認させることができる。
[適用例10]
本適用例に係る電子機器において、前記複数のタイミングには、バックスイング中に前記運動具の長手方向が水平面に沿うタイミング、トップのタイミング、ダウンスイング中
に前記運動具の把持部が減速し始めるタイミング、及びダウンスイング中に前記運動具の長手方向が水平面に沿うタイミング、のうち少なくとも2つが含まれてもよい。
本適用例に係る電子機器において、前記複数のタイミングには、バックスイング中に前記運動具の長手方向が水平面に沿うタイミング、トップのタイミング、ダウンスイング中
に前記運動具の把持部が減速し始めるタイミング、及びダウンスイング中に前記運動具の長手方向が水平面に沿うタイミング、のうち少なくとも2つが含まれてもよい。
従って、本適用例に係る電子機器は、スイングを代表する少なくとも2つのタイミングにおける運動具の姿勢を、識別データの配列へ反映させることができる。
[適用例11]
本適用例に係る電子機器において、前記慣性センサーには、加速度センサー及び角速度センサーの少なくとも一方が含まれてもよい。
本適用例に係る電子機器において、前記慣性センサーには、加速度センサー及び角速度センサーの少なくとも一方が含まれてもよい。
したがって、電子機器は、例えば、運動具の加速度、速度、位置、姿勢変化、姿勢の少なくとも1つに基づき識別データを提示することができる。
[適用例12]
本適用例において、前記提示部は、前記提示された前記識別データ基づいて、レベルを提示してもよい。
本適用例において、前記提示部は、前記提示された前記識別データ基づいて、レベルを提示してもよい。
[適用例13]
本適用例において、前記提示部は、前記提示された前記識別データ基づいて、診断情報を提示してもよい。
本適用例において、前記提示部は、前記提示された前記識別データ基づいて、診断情報を提示してもよい。
[適用例14]
本適用例において、前記提示部は、前記診断情報基づいて、スイングの練習方法に関する情報を提示してもよい。
本適用例において、前記提示部は、前記診断情報基づいて、スイングの練習方法に関する情報を提示してもよい。
[適用例15]
本適用例に係るシステムは、本適用例に係る何れかの電子機器と、前記慣性センサーと、を含む。
本適用例に係るシステムは、本適用例に係る何れかの電子機器と、前記慣性センサーと、を含む。
[適用例16]
本適用例に係るシステムは、本適用例に係る何れかの電子機器と、前記識別データを表示する頭部装着型表示装置とを含む。
本適用例に係るシステムは、本適用例に係る何れかの電子機器と、前記識別データを表示する頭部装着型表示装置とを含む。
[適用例17]
本適用例に係るシステムは、本適用例に係る何れかの電子機器と、前記識別データを表示する腕部装着型表示装置とを含む。
本適用例に係るシステムは、本適用例に係る何れかの電子機器と、前記識別データを表示する腕部装着型表示装置とを含む。
[適用例18]
本適用例に係る提示方法は、慣性センサーの出力を用いて、予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示するステップを含む。
本適用例に係る提示方法は、慣性センサーの出力を用いて、予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示するステップを含む。
[適用例19]
本適用例において、前記提示するステップでは、前記識別データを時系列に前記ユーザーへ提示してもよい。
本適用例において、前記提示するステップでは、前記識別データを時系列に前記ユーザーへ提示してもよい。
[適用例20]
本適用例において、前記複数の領域は、前記運動具の基本姿勢を示す第1仮想面に基づいて設定されてもよい。
本適用例において、前記複数の領域は、前記運動具の基本姿勢を示す第1仮想面に基づいて設定されてもよい。
[適用例21]
本適用例において、前記第1仮想面は、打球の目標方向に沿った第1軸と、バックスイングの開始前における前記運動具の長手方向に沿った第2軸と、に基づいて特定される面であってもよい。
本適用例において、前記第1仮想面は、打球の目標方向に沿った第1軸と、バックスイングの開始前における前記運動具の長手方向に沿った第2軸と、に基づいて特定される面であってもよい。
[適用例22]
本適用例において、前記複数の領域は、前記第1仮想面と、前記ユーザーの肩付近を通る第2仮想面と、に基づいて設定されてもよい。
[適用例23]
本適用例において、前記第2仮想面は、前記第1軸を含み前記第1仮想面と所定角度をなす面であってもよい。
本適用例において、前記複数の領域は、前記第1仮想面と、前記ユーザーの肩付近を通る第2仮想面と、に基づいて設定されてもよい。
[適用例23]
本適用例において、前記第2仮想面は、前記第1軸を含み前記第1仮想面と所定角度をなす面であってもよい。
[適用例24]
本適用例において、前記第2仮想面は、前記第1仮想面と並行な平面であってもよい。
本適用例において、前記第2仮想面は、前記第1仮想面と並行な平面であってもよい。
[適用例25]
本適用例において、前記提示するステップは、前記識別データと共に前記第1仮想面及び前記第2仮想面を前記ユーザーへ提示してもよい。
本適用例において、前記提示するステップは、前記識別データと共に前記第1仮想面及び前記第2仮想面を前記ユーザーへ提示してもよい。
[適用例26]
本適用例において、前記提示するステップは、前記識別データと共に前記スイングの軌跡を前記ユーザーへ提示してもよい。
本適用例において、前記提示するステップは、前記識別データと共に前記スイングの軌跡を前記ユーザーへ提示してもよい。
[適用例27]
本適用例において、前記複数のタイミングには、バックスイング中に前記運動具の長手方向が水平面に沿うタイミング、トップのタイミング、ダウンスイング中に前記運動具の把持部が減速し始めるタイミング、及びダウンスイング中に前記運動具の長手方向が水平面に沿うタイミング、のうち少なくとも2つが含まれてもよい。
本適用例において、前記複数のタイミングには、バックスイング中に前記運動具の長手方向が水平面に沿うタイミング、トップのタイミング、ダウンスイング中に前記運動具の把持部が減速し始めるタイミング、及びダウンスイング中に前記運動具の長手方向が水平面に沿うタイミング、のうち少なくとも2つが含まれてもよい。
[適用例28]
本適用例に係る提示プログラムは、慣性センサーの出力を用いて、予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示するステップをコンピューターに実行させる。
本適用例に係る提示プログラムは、慣性センサーの出力を用いて、予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示するステップをコンピューターに実行させる。
[適用例29]
本適用例に係る記録媒体は、慣性センサーの出力を用いて、予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示するステップをコンピューターに実行させる提示プログラムを記録する。
本適用例に係る記録媒体は、慣性センサーの出力を用いて、予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示するステップをコンピューターに実行させる提示プログラムを記録する。
以下、本発明の好適な実施形態について図面を用いて詳細に説明する。なお、以下に説明する実施の形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
以下では、ゴルフスイングの解析を行うスイング解析システムを例に挙げて説明する。
1.スイング解析システム
1−1.スイング解析システムの構成
図1は、本実施形態のスイング解析システムの構成例を示す図である。図1に示すように、本実施形態のスイング解析システム1は、センサーユニット10、スイング解析装置20及びサーバー装置30を含んで構成されている。
1−1.スイング解析システムの構成
図1は、本実施形態のスイング解析システムの構成例を示す図である。図1に示すように、本実施形態のスイング解析システム1は、センサーユニット10、スイング解析装置20及びサーバー装置30を含んで構成されている。
センサーユニット10(慣性センサーの一例)は、3軸の各軸方向に生じる加速度と3軸の各軸回りに生じる角速度を計測可能であり、図2に示すように、ゴルフクラブ3に装着される。
本実施形態では、図3に示すように、センサーユニット10は、3つの検出軸(x軸,y軸,z軸)のうちの1軸、例えばy軸をゴルフクラブ3のシャフトの長手方向(ゴルフクラブ3の長手方向)に合わせるようにして、シャフトの一部に取り付けられる。望ましくは、センサーユニット10は、打球時の衝撃が伝わりにくく、スイング時に遠心力がかかりにくいグリップ(把持部の一例)に近い位置に取り付けられる。シャフトは、ゴルフクラブ3のヘッドを除いた柄の部分であり、グリップも含まれる。ただし、センサーユニット10は、ユーザー2の部位(例えば、手やグローブなど)に取り付けられてもよいし、腕時計などのアクセサリーに取り付けられてもよい。
ユーザー2は、あらかじめ決められた手順に従って、ゴルフボール4を打球するスイング動作を行う。図4は、本実施形態においてユーザー2が打球するまでに行う動作の手順を示す図である。図4に示すように、ユーザー2は、まず、スイング解析装置20を介してユーザー2の身体情報とユーザー2が使用するゴルフクラブ3に関する情報(ゴルフクラブ情報)などの入力操作を行う(S1)。身体情報は、ユーザー2の身長、腕の長さ及び脚の長さの少なくとも1つの情報を含み、さらに性別の情報やその他の情報を含んでもよい。ゴルフクラブ情報は、ゴルフクラブ3の長さ(クラブ長)の情報及びゴルフクラブ3の種類(番手)の少なくとも一方の情報を含む。次に、ユーザー2は、スイング解析装置20を介して計測開始操作(センサーユニット10に計測を開始させるための操作)を行う(S2)。次に、ユーザー2は、スイング解析装置20からアドレス姿勢(スイング開始前の基本姿勢)をとるように指示する通知(例えば音声による通知)を受けた後(S3のY)、ゴルフクラブ3のシャフトの長手方向がターゲットライン(打球の目標方向)に対して垂直となるようにアドレスの姿勢をとり、静止する(S4)。次に、ユーザー2は、スイング解析装置20からスイングを許可する通知(例えば音声による通知)を受けた後(S5のY)、スイング動作を行い、ゴルフボール4を打球する(S6)。
なお、ユーザー2がアドレス姿勢をとったときにおける運道具の姿勢は、運動具の基本姿勢の一例である。なお、ユーザー2がスイング開始前の姿勢にあるときにおける運動具の姿勢を、運動具の基本姿勢としてもよい。
図5は、スイング解析装置20の表示部25(図9参照)に表示される身体情報及びゴルフクラブ情報の入力画面の一例を示す図である。ユーザー2は、図4のステップS1において、図5に示す入力画面上で身長、性別、年齢、国などの身体情報を入力し、クラブ長(シャフトの長さ)、番手などのゴルフクラブ情報を入力する。なお、身体情報に含まれる情報は、これに限られず、例えば、身体情報は、身長に代えて又は身長とともに腕の長さ及び脚の長さの少なくとも一方の情報を含んでもよい。同様に、ゴルフクラブ情報に含まれる情報は、これに限られず、例えば、ゴルフクラブ情報は、クラブ長と番手のいずれか一方の情報を含まなくてもよいし、他の情報を含んでもよい。
ユーザー2が図4のステップS2の計測開始操作を行うと、スイング解析装置20はセンサーユニット10に計測開始コマンドを送信し、センサーユニット10は計測開始コマンドを受信して3軸加速度と3軸角速度の計測を開始する。センサーユニット10は、所定周期(例えば1ms)で3軸加速度と3軸角速度を計測し、計測したデータを順次、ス
イング解析装置20に送信する。センサーユニット10とスイング解析装置20との間の通信は、無線通信でもよいし、有線通信でもよい。
イング解析装置20に送信する。センサーユニット10とスイング解析装置20との間の通信は、無線通信でもよいし、有線通信でもよい。
スイング解析装置20は、図4のステップS5に示したスイング開始の許可をユーザー2に通知し、その後、センサーユニット10の計測データに基づいて、ユーザー2がゴルフクラブ3を用いて打球したスイング動作(図4のステップS6)を解析する。
図6に示すように、ユーザー2が図4のステップS6で行うスイング動作は、スイング(バックスイング)を開始した後、バックスイング中にゴルフクラブ3のシャフトが水平になるハーフウェイバック、バックスイングからダウンスイングに切り替わるトップ、ダウンスイング中にゴルフクラブ3のシャフトが水平になるハーフウェイダウンの各状態を経て、ゴルフボール4を打球するインパクト(打球)に至る動作を含んでいる。そして、スイング解析装置20は、スイングが行われた時刻(日時)、ユーザー2の識別情報や性別、ゴルフクラブ3の種類、スイング動作の解析結果の情報を含むスイング解析データを生成し、ネットワーク40(図1参照)を介して、サーバー装置30に送信する。
サーバー装置30は、スイング解析装置20が送信したスイング解析データを、ネットワーク40を介して受信して保存する。従って、ユーザー2が図4の手順に従ってスイング動作を行う度に、スイング解析装置20により生成されたスイング解析データがサーバー装置30に保存され、スイング解析データリストが構築される。
なお、例えば、スイング解析装置20は、スマートフォンやパーソナルコンピューター等の情報端末(クライアント端末)で実現され、サーバー装置30は、スイング解析装置20からの要求を処理するサーバーで実現されてもよい。
また、ネットワーク40は、インターネット等のワイドエリアネットワーク(WAN:World Area Network)でもよいし、ローカルエリアネットワーク(LAN:Local Area Network)でもよい。あるいは、スイング解析装置20とサーバー装置30とは、例えば、近距離無線通信や有線通信により、ネットワーク40を介さずに通信してもよい。
本実施形態では、ユーザー2は、スイング解析装置20の操作部23(図9参照)を介してスイング解析アプリケーションを起動させると、スイング解析装置20はサーバー装置30と通信し、スイング解析装置20の表示部25に、例えば、図7に示すようなスイング解析データの選択画面が表示される。この選択画面には、サーバー装置30に保存されているスイング解析データリストに含まれるユーザー2の各スイング解析データについて、時刻(日時)、使用されたゴルフクラブの種類及びスイングの解析結果としての一部の指標の値が含まれている。
図7に示す選択画面の左端には、各スイング解析データに対応づけられたチェックボックスがあり、ユーザー2は、スイング解析装置20の操作を介して、いずれか1つのチェックボックスをチェックした後、この選択画面の下部にあるOKボタンを押下する。これにより、スイング解析装置20はサーバー装置30と通信し、スイング解析装置20の表示部25に、図7の選択画面でチェックされたチェックボックスに対応づけられたスイング解析データを表示する(例えば図8を参照)。
1−2.センサーユニット及びスイング解析装置の構成
図9は、センサーユニット10及びスイング解析装置20の構成例を示す図である。図9に示すように、本実施形態では、センサーユニット10は、加速度センサー12、角速度センサー14、信号処理部16及び通信部18を含んで構成されている。ただし、センサーユニット10は、適宜、これらの構成要素の一部が削除又は変更され、あるいは、他
の構成要素が付加された構成であってもよい。
図9は、センサーユニット10及びスイング解析装置20の構成例を示す図である。図9に示すように、本実施形態では、センサーユニット10は、加速度センサー12、角速度センサー14、信号処理部16及び通信部18を含んで構成されている。ただし、センサーユニット10は、適宜、これらの構成要素の一部が削除又は変更され、あるいは、他
の構成要素が付加された構成であってもよい。
加速度センサー12は、互いに交差する(理想的には直交する)3軸方向の各々に生じる加速度を計測し、計測した3軸加速度の大きさ及び向きに応じたデジタル信号(加速度データ)を出力する。
角速度センサー14は、互いに交差する(理想的には直交する)3軸の各々の軸回りに生じる角速度を計測し、計測した3軸角速度の大きさ及び向きに応じたデジタル信号(角速度データ)を出力する。
信号処理部16は、加速度センサー12と角速度センサー14から、それぞれ加速度データと角速度データを受け取って時刻情報を付して不図示の記憶部に記憶し、記憶した計測データ(加速度データと角速度データ)に時刻情報を付して通信用のフォーマットに合わせたパケットデータを生成し、通信部18に出力する。
加速度センサー12及び角速度センサー14は、それぞれ3軸が、センサーユニット10に対して定義される直交座標系(センサー座標系)の3軸(x軸、y軸、z軸)と一致するようにセンサーユニット10に取り付けられるのが理想的だが、実際には取り付け角の誤差が生じる。そこで、信号処理部16は、取り付け角誤差に応じてあらかじめ算出された補正パラメーターを用いて、加速度データ及び角速度データをxyz座標系のデータに変換する処理を行う。
さらに、信号処理部16は、加速度センサー12及び角速度センサー14の温度補正処理を行ってもよい。あるいは、加速度センサー12及び角速度センサー14に温度補正の機能が組み込まれていてもよい。
なお、加速度センサー12と角速度センサー14は、アナログ信号を出力するものであってもよく、この場合は、信号処理部16が、加速度センサー12の出力信号と角速度センサー14の出力信号をそれぞれA/D変換して計測データ(加速度データと角速度データ)を生成し、これらを用いて通信用のパケットデータを生成すればよい。
通信部18は、信号処理部16から受け取ったパケットデータをスイング解析装置20に送信する処理や、スイング解析装置20から計測開始コマンド等の各種の制御コマンドを受信して信号処理部16に送る処理等を行う。信号処理部16は、制御コマンドに応じた各種処理を行う。
図9に示すように、本実施形態では、スイング解析装置20は、処理部21、通信部22、操作部23、記憶部24、表示部25、音出力部26及び通信部27を含んで構成されている。ただし、スイング解析装置20は、適宜、これらの構成要素の一部が削除又は変更され、あるいは、他の構成要素が付加された構成であってもよい。
通信部22は、センサーユニット10から送信されたパケットデータを受信し、処理部21に送る処理や、処理部21からの制御コマンドをセンサーユニット10に送信する処理等を行う。
操作部23は、ユーザー2の操作に応じたデータを取得し、処理部21に送る処理を行う。操作部23は、例えば、タッチパネル型ディスプレイ、ボタン、キー、マイクなどであってもよい。
記憶部24は、例えば、ROM(Read Only Memory)やフラッシュROM、RAM(Ra
ndom Access Memory)等の各種ICメモリーやハードディスクやメモリーカードなどの記録媒体等により構成される。記憶部24は、処理部21が各種の計算処理や制御処理を行うためのプログラムや、アプリケーション機能を実現するための各種プログラムやデータ等を記憶している。
ndom Access Memory)等の各種ICメモリーやハードディスクやメモリーカードなどの記録媒体等により構成される。記憶部24は、処理部21が各種の計算処理や制御処理を行うためのプログラムや、アプリケーション機能を実現するための各種プログラムやデータ等を記憶している。
本実施形態では、記憶部24には、処理部21によって読み出され、スイング解析処理を実行するためのスイング解析プログラム240が記憶されている。スイング解析プログラム240は、あらかじめ不揮発性の記録媒体(コンピューターに読み取り可能な記録媒体)に記憶されていてもよいし、処理部21がネットワークを介して不図示のサーバーあるいはサーバー装置30からスイング解析プログラム240を受信して記憶部24に記憶させてもよい。
また、本実施形態では、記憶部24には、ゴルフクラブ情報242、身体情報244及びセンサー装着位置情報246及びスイング解析データ248が記憶される。例えば、ユーザー2が、操作部23を操作して、図5の入力画面から、使用するゴルフクラブ3の仕様情報(例えば、シャフトの長さ、重心の位置、ライ角、フェース角、ロフト角等の情報などの少なくとも一部の情報)を入力し、入力された仕様情報をゴルフクラブ情報242としてもよい。あるいは、ユーザー2が、図4のステップS1において、ゴルフクラブ3の型番を入力(あるいは、型番リストから選択)し、記憶部24にあらかじめ記憶されている型番毎の仕様情報のうち、入力された型番の仕様情報をゴルフクラブ情報242としてもよい。
また、例えば、ユーザー2が、操作部23を操作して、図5の入力画面から、身体情報を入力し、入力された身体情報を身体情報244としてもよい。また、例えば、図4のステップS1において、ユーザー2が操作部23を操作してセンサーユニット10の装着位置とゴルフクラブ3のグリップエンドとの間の距離を入力し、入力された距離の情報をセンサー装着位置情報246としてもよい。あるいは、センサーユニット10を決められた所定位置(例えば、グリップエンドから20cmの距離など)に装着するものとして、当該所定位置の情報がセンサー装着位置情報246としてあらかじめ記憶されていてもよい。
スイング解析データ248は、スイングが行われた時刻(日時)、ユーザー2の識別情報や性別、ゴルフクラブ3の種類とともに、処理部21(スイング解析部211)によるスイング動作の解析結果の情報を含むデータである。
また、記憶部24は、処理部21の作業領域として用いられ、操作部23が取得したデータ、処理部21が各種プログラムに従って実行した演算結果等を一時的に記憶する。さらに、記憶部24は、処理部21の処理により生成されたデータのうち、長期的な保存が必要なデータを記憶してもよい。
表示部25は、処理部21の処理結果を文字、グラフ、表、アニメーション、その他の画像として表示するものである。表示部25は、例えば、CRT、LCD、タッチパネル型ディスプレイ、ヘッドマウントディスプレイ(HMD:Head Mounted Display)などであってもよい。なお、1つのタッチパネル型ディスプレイで操作部23と表示部25の機能を実現するようにしてもよい。
音出力部26は、処理部21の処理結果を音声やブザー音等の音として出力するものである。音出力部26は、例えば、スピーカーやブザーなどであってもよい。
通信部27は、ネットワーク40を介してサーバー装置30の通信部32(図22参照
)との間でデータ通信を行うものである。例えば、通信部27は、スイング解析処理の終了後、処理部21からスイング解析データ248を受け取って、サーバー装置30の通信部32に送信する処理を行う。また、例えば、通信部27は、図7の選択画面の表示に必要な情報をサーバー装置30の通信部32から受信して処理部21に送る処理や、図7の選択画面における選択情報を処理部21から受け取ってサーバー装置30の通信部32に送信する処理を行う。また、例えば、通信部27は、図8の表示画面の表示に必要な情報をサーバー装置30の通信部32から受信して処理部21に送る処理を行う。
)との間でデータ通信を行うものである。例えば、通信部27は、スイング解析処理の終了後、処理部21からスイング解析データ248を受け取って、サーバー装置30の通信部32に送信する処理を行う。また、例えば、通信部27は、図7の選択画面の表示に必要な情報をサーバー装置30の通信部32から受信して処理部21に送る処理や、図7の選択画面における選択情報を処理部21から受け取ってサーバー装置30の通信部32に送信する処理を行う。また、例えば、通信部27は、図8の表示画面の表示に必要な情報をサーバー装置30の通信部32から受信して処理部21に送る処理を行う。
処理部21は、各種プログラムに従い、通信部22を介してセンサーユニット10に制御コマンドを送信する処理や、通信部22を介してセンサーユニット10から受信したデータに対する各種の計算処理を行う。また、処理部21は、各種プログラムに従い、記憶部24からスイング解析データ248を読み出して、通信部27を介してサーバー装置30に送信する処理を行う。また、処理部21は、各種プログラムに従い、通信部27を介して、サーバー装置30に各種の情報を送信し、サーバー装置30から受信した情報に基づいて各種の画面(図7、図8の各画面等)を表示する処理等を行う。また、処理部21は、その他の各種の制御処理を行う。
特に、本実施形態では、処理部21は、スイング解析プログラム240を実行することにより、データ取得部210、スイング解析部211、画像データ生成部212、記憶処理部213、表示処理部214及び音出力処理部215として機能し、ユーザー2のスイング動作を解析する処理(スイング解析処理)を行う。
データ取得部210は、通信部22がセンサーユニット10から受信したパケットデータを受け取り、受け取ったパケットデータから時刻情報及び計測データを取得し、記憶処理部213に送る処理を行う。また、データ取得部310は、通信部27がサーバー装置30から受信した各種の画面(図7、図8の各画面等)の表示に必要な情報を受け取って、画像データ生成部212に送る処理を行う。
記憶処理部213は、記憶部24に対する各種プログラムや各種データのリード/ライト処理を行う。例えば、記憶処理部213は、データ取得部210から受け取った時刻情報と計測データを対応づけて記憶部24に記憶させる処理や、スイング解析部211が算出した各種の情報やスイング解析データ248等を記憶部24に記憶させる処理を行う。
スイング解析部211は、センサーユニット10が出力する計測データ(記憶部24に記憶されている計測データ)や操作部23からのデータなどを用いて、ユーザー2のスイング運動を解析し、スイングが行われた時刻(日時)、ユーザー2の識別情報や性別、ゴルフクラブ3の種類、スイング動作の解析結果の情報を含むスイング解析データ248を生成する処理を行う。特に、本実施形態では、スイング解析部211は、スイング動作の解析結果の情報の少なくとも一部として、スイングの各指標の値を算出する。
スイング解析部211は、スイングの指標として、少なくとも1つの仮想面を算出してもよい。例えば、少なくとも1つの仮想面は、後述する、シャフトプレーンSP(第1仮想面の一例)と、シャフトプレーンSPと第1角度をなすホーガンプレーンHP(第2仮想面の一例)とを含み、スイング解析部211は、この指標として、「シャフトプレーンSP」と「ホーガンプレーンHP」とを算出してもよい。
また、スイング解析部211は、スイングの指標として、バックスイング中の第1のタイミングでのゴルフクラブ3のヘッドの位置を算出してもよい。例えば、第1のタイミングは、バックスイング中にゴルフクラブ3の長手方向が水平方向に沿う方向となるハーフウェイバックのときであり、スイング解析部211は、この指標として、後述する「ハー
フウェイバック時のヘッドの位置」を算出してもよい。
フウェイバック時のヘッドの位置」を算出してもよい。
また、スイング解析部211は、スイングの指標として、ダウンスイング中の第2のタイミングでのゴルフクラブ3のヘッドの位置を算出してもよい。例えば、第2のタイミングは、ダウンスイング中にゴルフクラブ3の長手方向が水平方向に沿う方向となるハーフウェイダウンのときであり、スイング解析部211は、この指標として、後述する「ハーフウェイダウン時のヘッドの位置」を算出してもよい。
また、スイング解析部211は、スイングの指標として、インパクト(打球時)におけるゴルフクラブ3のヘッドの入射角に基づく指標を算出してもよい。例えば、スイング解析部211は、この指標として、後述する「クラブパス(入射角)ψ」、「アタック角」を算出してもよい。
また、スイング解析部211は、スイングの指標として、インパクト(打球時)におけるゴルフクラブ3のヘッドの傾きに基づく指標を算出してもよい。例えば、スイング解析部211は、この指標として、後述する「(絶対)フェース角φ」、「相対フェース角η」を算出してもよい。
また、スイング解析部211は、スイングの指標として、インパクト(打球時)におけるゴルフクラブ3の速度に基づく指標を算出してもよい。例えば、スイング解析部211は、この指標として、後述する「ヘッドスピード」を算出してもよい。
また、スイング解析部211は、スイングの指標として、シャフトの長手方向を回転軸として、バックスイングの開始時からインパクト(打球時)までの間の所定のタイミングにおけるゴルフクラブ3の前記シャフトの前記回転軸回り(以下、長軸回りと称す)の回転角に基づく指標を算出してもよい。ゴルフクラブ3の長軸回りの回転角は、基準となるタイミングから当該所定のタイミングまでにゴルフクラブ3が長軸回りに回転した角度であってもよい。基準となるタイミングは、バックスイングの開始時であってもよいし、アドレス時であってもよい。また、所定のタイミングは、バックスイングからダウンスイングに移行するとき(トップのとき)であってもよい。例えば、スイング解析部211は、この指標として、後述する「トップ時のシャフト軸回転角θtop」を算出してもよい。
また、スイング解析部211は、スイングの指標として、ダウンスイングにおけるゴルフクラブ3のグリップの減速量に基づく指標を算出してもよい。例えば、スイング解析部211は、この指標として、後述する「グリップ減速率RV」を算出してもよい。
また、スイング解析部211は、スイングの指標として、ダウンスイングにおけるゴルフクラブ3のグリップの減速期間に基づく指標を算出してもよい。例えば、スイング解析部211は、この指標として、後述する「グリップ減速時間率RT」を算出してもよい。
ただし、スイング解析部211は、適宜、これらの指標の一部の値を算出しなくてもよいし、その他の指標の値を算出してもよい。
画像データ生成部212は、表示部25に表示される画像に対応する画像データを生成する処理を行う。例えば、画像データ生成部212は、データ取得部210が受け取った各種の情報に基づき、図7に示した選択画面、図8に示した表示画面に対応する画像データを生成する。
表示処理部214は、表示部25に対して各種の画像(画像データ生成部212が生成した画像データに対応する画像の他、文字や記号等も含む)を表示させる処理を行う。例
えば、表示処理部214は、画像データ生成部212が生成した画像データに基づき、表示部25に、図7に示した選択画面、図8に示した表示画面等を表示させる。また、例えば、画像データ生成部212は、図4のステップS5において、ユーザー2にスイングの開始の許可を通知するための画像や文字等を表示部25に表示させてもよい。また、例えば、表示処理部214は、ユーザー2のスイング運動が終了した後、自動的に、あるいは、ユーザー2の入力操作に応じて、スイング解析部211による解析結果を示す文字や記号等のテキスト情報を表示部25に表示させてもよい。あるいは、センサーユニット10に表示部を設けておいて、表示処理部214は、通信部22を介してセンサーユニット10に画像データを送信し、センサーユニット10の表示部に各種の画像や文字等を表示させてもよい。
えば、表示処理部214は、画像データ生成部212が生成した画像データに基づき、表示部25に、図7に示した選択画面、図8に示した表示画面等を表示させる。また、例えば、画像データ生成部212は、図4のステップS5において、ユーザー2にスイングの開始の許可を通知するための画像や文字等を表示部25に表示させてもよい。また、例えば、表示処理部214は、ユーザー2のスイング運動が終了した後、自動的に、あるいは、ユーザー2の入力操作に応じて、スイング解析部211による解析結果を示す文字や記号等のテキスト情報を表示部25に表示させてもよい。あるいは、センサーユニット10に表示部を設けておいて、表示処理部214は、通信部22を介してセンサーユニット10に画像データを送信し、センサーユニット10の表示部に各種の画像や文字等を表示させてもよい。
音出力処理部215は、音出力部26に対して各種の音(音声やブザー音等も含む)を出力させる処理を行う。例えば、音出力処理部215は、図4のステップS5において、ユーザー2にスイングの開始の許可を通知するための音を音出力部26から出力させてもよい。また、例えば、音出力処理部215は、ユーザー2のスイング運動が終了した後、自動的に、あるいは、ユーザー2の入力操作に応じて、スイング解析部211による解析結果を示す音や音声を音出力部26から出力させてもよい。あるいは、センサーユニット10に音出力部を設けておいて、音出力処理部215は、通信部22を介してセンサーユニット10に各種の音データや音声データを送信し、センサーユニット10の音出力部に各種の音や音声を出力させてもよい。
なお、スイング解析装置20あるいはセンサーユニット10に振動機構を設けておいて、当該振動機構により各種の情報を振動情報に変換してユーザー2に通知してもよい。
1−3.スイング解析処理
本実施形態では、アドレス時(静止時)のゴルフクラブ3のヘッドの位置を原点とし、打球の目標方向を示すターゲットラインをX軸、X軸に垂直な水平面上の軸をY軸、鉛直上方向(重力加速度の方向と逆方向)をZ軸とするXYZ座標系(グローバル座標系)を定義する。そして、スイング解析部211は、各指標値を算出するために、センサーユニット10の計測データ(加速度データ及び角速度データ)を用いて、XYZ座標系(グローバル座標系)における、アドレス時からのセンサーユニット10の位置及び姿勢を時系列に算出する。また、スイング解析部211は、センサーユニット10の計測データ(加速度データ又は角速度データ)を用いて、図6に示した、スイング開始、トップ及びインパクトの各タイミングを検出する。そして、スイング解析部211は、センサーユニット10の位置及び姿勢の時系列データと、スイング開始、トップ及びインパクトの各タイミングとを用いて、スイングの各指標(例えば、シャフトプレーン、ホーガンプレーン、ハーフウェイバック時のヘッド位置、ハーフウェイダウン時のヘッド位置、フェース角、クラブパス(入射角)、トップ時のシャフト軸回転角、ヘッドスピード、グリップ減速率及びグリップ減速時間率等)の値を算出し、スイング解析データ248を生成する。
本実施形態では、アドレス時(静止時)のゴルフクラブ3のヘッドの位置を原点とし、打球の目標方向を示すターゲットラインをX軸、X軸に垂直な水平面上の軸をY軸、鉛直上方向(重力加速度の方向と逆方向)をZ軸とするXYZ座標系(グローバル座標系)を定義する。そして、スイング解析部211は、各指標値を算出するために、センサーユニット10の計測データ(加速度データ及び角速度データ)を用いて、XYZ座標系(グローバル座標系)における、アドレス時からのセンサーユニット10の位置及び姿勢を時系列に算出する。また、スイング解析部211は、センサーユニット10の計測データ(加速度データ又は角速度データ)を用いて、図6に示した、スイング開始、トップ及びインパクトの各タイミングを検出する。そして、スイング解析部211は、センサーユニット10の位置及び姿勢の時系列データと、スイング開始、トップ及びインパクトの各タイミングとを用いて、スイングの各指標(例えば、シャフトプレーン、ホーガンプレーン、ハーフウェイバック時のヘッド位置、ハーフウェイダウン時のヘッド位置、フェース角、クラブパス(入射角)、トップ時のシャフト軸回転角、ヘッドスピード、グリップ減速率及びグリップ減速時間率等)の値を算出し、スイング解析データ248を生成する。
[センサーユニット10の位置及び姿勢の算出]
ユーザー2が図4のステップS4の動作を行うと、まず、スイング解析部211は、加速度センサー12が計測した加速度データ等の変化量が所定時間継続して閾値を超えない場合に、ユーザー2がアドレス姿勢で静止していると判定する。次に、スイング解析部211は、当該所定時間内の計測データ(加速度データ及び角速度データ)を用いて、計測データに含まれるオフセット量を計算する。次に、スイング解析部211は、計測データからオフセット量を減算してバイアス補正し、バイアス補正された計測データを用いて、ユーザー2のスイング動作中(図4のステップS6の動作中)のセンサーユニット10の位置及び姿勢を計算する。
ユーザー2が図4のステップS4の動作を行うと、まず、スイング解析部211は、加速度センサー12が計測した加速度データ等の変化量が所定時間継続して閾値を超えない場合に、ユーザー2がアドレス姿勢で静止していると判定する。次に、スイング解析部211は、当該所定時間内の計測データ(加速度データ及び角速度データ)を用いて、計測データに含まれるオフセット量を計算する。次に、スイング解析部211は、計測データからオフセット量を減算してバイアス補正し、バイアス補正された計測データを用いて、ユーザー2のスイング動作中(図4のステップS6の動作中)のセンサーユニット10の位置及び姿勢を計算する。
具体的には、まず、スイング解析部211は、加速度センサー12が計測した加速度データ、ゴルフクラブ情報242及びセンサー装着位置情報246を用いて、XYZ座標系(グローバル座標系)におけるユーザー2の静止時(アドレス時)のセンサーユニット10の位置(初期位置)を計算する。
図10は、ユーザー2の静止時(アドレス時)におけるゴルフクラブ3とセンサーユニット10をX軸の負側から視た平面図である。ゴルフクラブ3のヘッドの位置61が原点
O(0,0,0)であり、グリップエンドの位置62の座標は(0,GY,GZ)である。ユーザー2は図4のステップS4の動作を行うので、グリップエンドの位置62やセンサーユニット10の初期位置は、そのX座標が0であり、YZ平面上に存在する。図10に示すように、ユーザー2の静止時にセンサーユニット10には重力加速度1Gがかかるので、センサーユニット10が計測するy軸加速度y(0)とゴルフクラブ3のシャフトの傾斜角(シャフトの長手方向と水平面(XY平面)とのなす角)αとの関係は式(1)で表される。
O(0,0,0)であり、グリップエンドの位置62の座標は(0,GY,GZ)である。ユーザー2は図4のステップS4の動作を行うので、グリップエンドの位置62やセンサーユニット10の初期位置は、そのX座標が0であり、YZ平面上に存在する。図10に示すように、ユーザー2の静止時にセンサーユニット10には重力加速度1Gがかかるので、センサーユニット10が計測するy軸加速度y(0)とゴルフクラブ3のシャフトの傾斜角(シャフトの長手方向と水平面(XY平面)とのなす角)αとの関係は式(1)で表される。
従って、スイング解析部211は、アドレス時(静止時)の任意の時刻間内の任意の加速度データを用いて、式(1)より、傾斜角αを算出することができる。
次に、スイング解析部211は、ゴルフクラブ情報242に含まれるシャフトの長さL1からセンサー装着位置情報246に含まれるセンサーユニット10とグリップエンドとの距離LSGを減算して、センサーユニット10とヘッドとの距離LSHを求める。さらに、スイング解析部211は、シャフトの傾斜角αにより特定される方向(センサーユニット10のy軸の負の方向)にヘッドの位置61(原点O)から距離LSHの位置をセンサーユニット10の初期位置とする。
そして、スイング解析部211は、その後の加速度データを積分してセンサーユニット10の初期位置からの位置の座標を時系列に計算する。
また、スイング解析部211は、加速度センサー12が計測した加速度データを用いて、XYZ座標系(グローバル座標系)におけるユーザー2の静止時(アドレス時)のセンサーユニット10の姿勢(初期姿勢)を計算する。ユーザー2は図4のステップS4の動作を行うので、ユーザー2のアドレス時(静止時)には、センサーユニット10のx軸はXYZ座標系のX軸と方向が一致し、かつ、センサーユニット10のy軸はYZ平面上にあるため、スイング解析部211は、ゴルフクラブ3のシャフトの傾斜角αより、センサーユニット10の初期姿勢を特定することができる。
そして、スイング解析部211は、その後の角速度センサー14が計測した角速度データを用いた回転演算を行ってセンサーユニット10の初期姿勢からの姿勢の変化を時系列に計算する。センサーユニット10の姿勢は、例えば、X軸、Y軸、Z軸回りの回転角(ロール角、ピッチ角、ヨー角)、クオータ二オン(四元数)などで表現することができる。
なお、センサーユニット10の信号処理部16が、計測データのオフセット量を計算し、計測データのバイアス補正を行うようにしてもよいし、加速度センサー12及び角速度センサー14にバイアス補正の機能が組み込まれていてもよい。これらの場合は、スイン
グ解析部211による計測データのバイアス補正が不要となる。
グ解析部211による計測データのバイアス補正が不要となる。
[スイング開始、トップ及びインパクトのタイミングの検出]
スイング解析部211は、まず、計測データを用いて、ユーザー2が打球したタイミング(インパクトのタイミング)を検出する。例えば、スイング解析部211は、計測データ(加速度データ又は角速度データ)の合成値を計算し、当該合成値に基づいてインパクトのタイミング(時刻)を検出してもよい。
スイング解析部211は、まず、計測データを用いて、ユーザー2が打球したタイミング(インパクトのタイミング)を検出する。例えば、スイング解析部211は、計測データ(加速度データ又は角速度データ)の合成値を計算し、当該合成値に基づいてインパクトのタイミング(時刻)を検出してもよい。
具体的には、まず、スイング解析部211は、角速度データ(時刻t毎のバイアス補正された角速度データ)を用いて、各時刻tでの角速度の合成値n0(t)の値を計算する。例えば、時刻tでの角速度データをx(t)、y(t)、z(t)とすると、スイング解析部211は、次の式(2)により、角速度の合成値n0(t)を計算する。

次に、スイング解析部211は、各時刻tでの角速度の合成値n0(t)を所定範囲に正規化(スケール変換)した合成値n(t)に変換する。例えば、計測データの取得期間における角速度の合成値の最大値をmax(n0)とすると、スイング解析部211は、次の式(3)により、角速度の合成値n0(t)を0〜100の範囲に正規化した合成値n(t)に変換する。
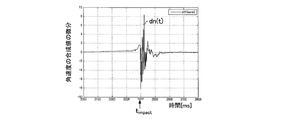
次に、スイング解析部211は、各時刻tでの正規化後の合成値n(t)の微分dn(t)を計算する。例えば、3軸角速度データの計測周期をΔtとすると、スイング解析部211は、次の式(4)により、時刻tでの角速度の合成値の微分(差分)dn(t)を計算する。
図11は、ユーザー2がスイングを行ってゴルフボール4を打ったときの3軸角速度データx(t)、y(t)、z(t)の一例を示す。図11において、横軸は時間(msec)、縦軸は角速度(dps)である。
図12は、図11の3軸角速度データx(t),y(t),z(t)から3軸角速度の合成値n0(t)を式(2)に従って計算した後に式(3)に従って0〜100に正規化した合成値n(t)をグラフ表示した図である。図12において、横軸は時間(msec)、縦軸は角速度の合成値である。
図13は、図12の3軸角速度の合成値n(t)からその微分dn(t)を式(4)に従って計算し、グラフ表示した図である。図13において、横軸は時間(msec)、縦
軸は3軸角速度の合成値の微分値である。なお、図11及び図12では横軸を0〜5秒で表示しているが、図13では、インパクトの前後の微分値の変化がわかるように、横軸を2秒〜2.8秒で表示している。
軸は3軸角速度の合成値の微分値である。なお、図11及び図12では横軸を0〜5秒で表示しているが、図13では、インパクトの前後の微分値の変化がわかるように、横軸を2秒〜2.8秒で表示している。
次に、スイング解析部211は、合成値の微分dn(t)の値が最大となる時刻と最小となる時刻のうち、先の時刻をインパクトの時刻timpact(インパクトのタイミング)として検出する(図13参照)。通常のゴルフスイングでは、インパクトの瞬間にスイング速度が最大になると考えられる。そして、スイング速度に応じて角速度の合成値の値も変化すると考えられるので、スイング解析部211は、一連のスイング動作の中で角速度の合成値の微分値が最大又は最小となるタイミング(すなわち、角速度の合成値の微分値が正の最大値又は負の最小値になるタイミング)をインパクトのタイミングとして捉えることができる。なお、インパクトによりゴルフクラブ3が振動するため、角速度の合成値の微分値が最大となるタイミングと最小となるタイミングが対になって生じると考えられるが、そのうちの先のタイミングがインパクトの瞬間と考えられる。
次に、スイング解析部211は、インパクトの時刻timpactよりも前で合成値n(t)が0に近づく極小点の時刻をトップの時刻ttop(トップのタイミング)として検出する(図12参照)。通常のゴルフスイングでは、スイング開始後、トップで一旦動作が止まり、その後、徐々にスイング速度が大きくなってインパクトに至ると考えられる。従って、スイング解析部211は、インパクトのタイミングより前で角速度の合成値が0に近づき極小となるタイミングをトップのタイミングとして捉えることができる。
次に、スイング解析部211は、トップの時刻ttopの前後で合成値n(t)が所定の閾値以下の区間をトップ区間とし、トップ区間の開始時刻より前で合成値n(t)が所定の閾値以下となる最後の時刻をスイング開始(バックスイング開始)の時刻tstartとして検出する(図12参照)。通常のゴルフスイングでは、静止した状態からスイング動作を開始し、トップまでにスイング動作が止まることは考えにくい。従って、スイング解析部211は、トップ区間より前で角速度の合成値が所定の閾値以下となる最後のタイミングをスイング動作の開始のタイミングとして捉えることができる。なお、スイング解析部211は、トップの時刻ttopよりも前で、合成値n(t)が0に近づく極小点の時刻をスイング開始の時刻tstartとして検出してもよい。
なお、スイング解析部211は、3軸加速度データを用いても、同様に、スイング開始、トップ、インパクトの各タイミングを検出することができる。
[シャフトプレーン及びホーガンプレーンの算出]
シャフトプレーンは、ユーザー2のスイング開始前のアドレス時(静止状態)において、ターゲットライン(打球の目標方向)とゴルフクラブ3のシャフトの長手方向とで特定される第1仮想面である。また、ホーガンプレーンは、ユーザー2のアドレス時において、ユーザー2の肩付近(肩や首の付け根など)とゴルフクラブのヘッド(あるいは、ゴルフボール4)を結ぶ仮想線とターゲットライン(打球の目標方向)とで特定される第2仮想面である。
シャフトプレーンは、ユーザー2のスイング開始前のアドレス時(静止状態)において、ターゲットライン(打球の目標方向)とゴルフクラブ3のシャフトの長手方向とで特定される第1仮想面である。また、ホーガンプレーンは、ユーザー2のアドレス時において、ユーザー2の肩付近(肩や首の付け根など)とゴルフクラブのヘッド(あるいは、ゴルフボール4)を結ぶ仮想線とターゲットライン(打球の目標方向)とで特定される第2仮想面である。
図14は、シャフトプレーン及びホーガンプレーンを示す図である。図14には、XYZ座標系(グローバル座標系)のX軸、Y軸、Z軸も表記されている。
図14に示すように、本実施形態では、打球の目標方向に沿った第1軸としての第1線分51と、ゴルフクラブ3のシャフトの長手方向に沿った第2軸としての第2線分52と、を含み、U1,U2,S1,S2を4つの頂点とする仮想平面をシャフトプレーンSP(第1仮想面)とする。本実施形態では、アドレス時のゴルフクラブ3のヘッドの位置
61をXYZ座標系の原点O(0,0,0)とし、第2線分52は、ゴルフクラブ3のヘッドの位置61(原点O)とグリップエンドの位置62とを結ぶ線分である。また、第1線分51は、X軸上のU1,U2を両端として原点Oを中点とする長さULの線分である。ユーザー2がアドレス時に図4のステップS4の動作を行うことでゴルフクラブ3のシャフトがターゲットライン(X軸)に対して垂直となるので、第1線分51は、ゴルフクラブ3のシャフトの長手方向と直交する線分、すなわち第2線分52と直交する線分である。スイング解析部211は、シャフトプレーンSPとして、XYZ座標系における4つの頂点U1,U2,S1,S2の各座標を算出する。
61をXYZ座標系の原点O(0,0,0)とし、第2線分52は、ゴルフクラブ3のヘッドの位置61(原点O)とグリップエンドの位置62とを結ぶ線分である。また、第1線分51は、X軸上のU1,U2を両端として原点Oを中点とする長さULの線分である。ユーザー2がアドレス時に図4のステップS4の動作を行うことでゴルフクラブ3のシャフトがターゲットライン(X軸)に対して垂直となるので、第1線分51は、ゴルフクラブ3のシャフトの長手方向と直交する線分、すなわち第2線分52と直交する線分である。スイング解析部211は、シャフトプレーンSPとして、XYZ座標系における4つの頂点U1,U2,S1,S2の各座標を算出する。
具体的には、まず、スイング解析部211は、傾斜角αとゴルフクラブ情報242に含まれるシャフトの長さL1とを用いて、ゴルフクラブ3のグリップエンドの位置62の座標(0,GY,GZ)を計算する。図10に示すように、スイング解析部211は、シャフトの長さL1と傾斜角αを用いて、式(5)及び式(6)により、GY,GZをそれぞれ計算することができる。
次に、スイング解析部211は、ゴルフクラブ3のグリップエンドの位置62の座標(0,GY,GZ)にスケールファクターSを乗算し、シャフトプレーンSPの頂点S1と頂点S2の中点S3の座標(0,SY,SZ)を計算する。すなわち、スイング解析部211は、式(7)及び式(8)により、SY及びSZをそれぞれ計算する。
図15は、図14のシャフトプレーンSPをYZ平面で切った断面図をX軸の負側から視た図である。図15に示すように、頂点S1と頂点S2の中点S3と原点Oとを結ぶ線分の長さ(シャフトプレーンSPのX軸と直交する方向の幅)は、第2線分52の長さL1のS倍となる。このスケールファクターSは、ユーザー2のスイング動作中のゴルフクラブ3の軌跡がシャフトプレーンSPに収まるような値に設定される。例えば、ユーザー2の腕の長さをL2とすると、シャフトプレーンSPのX軸と直交する方向の幅S×L1が、シャフトの長さL1と腕の長さL2の和の2倍となるように、スケールファクターSを式(9)のように設定してもよい。
また、ユーザー2の腕の長さL2は、ユーザー2の身長L0と相関があり、統計情報に基づき、例えば、ユーザー2が男性の場合は式(10)のような相関式で表され、ユーザー2が女性の場合は式(11)のような相関式で表される。
従って、スイング解析部211は、身体情報244に含まれるユーザー2の身長L0と性別とを用いて、式(10)又は式(11)により、ユーザーの腕の長さL2を算出することができる。
次に、スイング解析部211は、中点S3の座標(0,SY,SZ)及びシャフトプレーンSPのX軸方向の幅(第1線分51の長さ)ULを用いて、シャフトプレーンSPの頂点U1の座標(−UL/2,0,0)、頂点U2の座標(UL/2,0,0)、頂点S1の座標(−UL/2,SY,SZ)、S2の座標(UL/2,SY,SZ)を計算する。X軸方向の幅ULは、ユーザー2のスイング動作中のゴルフクラブ3の軌跡がシャフトプレーンSPに収まるような値に設定される。例えば、X軸方向の幅ULを、X軸と直交する方向の幅S×L1と同じ、すなわち、シャフトの長さL1と腕の長さL2の和の2倍に設定してもよい。
このようにして、スイング解析部211は、シャフトプレーンSPの4つの頂点U1,U2,S1,S2の座標を算出することができる。
また、図14に示すように、本実施形態では、第1軸としての第1線分51と、第3軸としての第3線分53と、を含み、U1,U2,H1,H2を4つの頂点とする仮想平面をホーガンプレーンHP(第2仮想面)とする。第3線分53は、ユーザー2の両肩を結ぶ線分付近にある所定位置63とゴルフクラブ3のヘッドの位置62とを結ぶ線分である。ただし、第3線分53は、所定位置63とゴルフボール4の位置とを結ぶ線分であってもよい。スイング解析部211は、ホーガンプレーンHPとして、XYZ座標系における4つの頂点U1,U2,H1,H2の各座標を算出する。
具体的には、まず、スイング解析部211は、アドレス時(静止時)のおけるゴルフクラブ3のグリップエンドの位置62の座標(0,GY,GZ)と、身体情報244に基づくユーザー2の腕の長さL2とを用いて、所定位置63を推定し、その座標(AX,AY,AZ)を計算する。
図16は、図14のホーガンプレーンHPをYZ平面で切った断面図をX軸の負側から視た図である。図16では、ユーザー2の両肩を結ぶ線分の中点を所定位置63として
おり、所定位置63はYZ平面上に存在する。従って、所定位置63のX座標AXは0である。そして、図16に示すように、スイング解析部211は、ゴルフクラブ3のグリップエンドの位置62をZ軸の正方向にユーザー2の腕の長さL2だけ移動させた位置が所定位置63であると推定する。従って、スイング解析部211は、所定位置63のY座標AYをグリップエンドの位置62のY座標GYと同じ値とする。また、スイング解析部211は、所定位置63のZ座標AZを、式(12)のように、グリップエンドの位置62のZ座標GZとユーザー2の腕の長さL2の和として計算する。
おり、所定位置63はYZ平面上に存在する。従って、所定位置63のX座標AXは0である。そして、図16に示すように、スイング解析部211は、ゴルフクラブ3のグリップエンドの位置62をZ軸の正方向にユーザー2の腕の長さL2だけ移動させた位置が所定位置63であると推定する。従って、スイング解析部211は、所定位置63のY座標AYをグリップエンドの位置62のY座標GYと同じ値とする。また、スイング解析部211は、所定位置63のZ座標AZを、式(12)のように、グリップエンドの位置62のZ座標GZとユーザー2の腕の長さL2の和として計算する。
次に、スイング解析部211は、所定位置63のY座標AY及びZ座標AZにそれぞれスケールファクターHを乗算し、ホーガンプレーンHPの頂点H1と頂点H2の中点H3の座標(0,HY,HZ)を計算する。すなわち、スイング解析部211は、式(13)及び式(14)により、HY及びHZをそれぞれ計算する。
図16に示すように、頂点H1と頂点H2の中点H3と原点Oとを結ぶ線分の長さ(ホーガンプレーンHPのX軸と直交する方向の幅)は、第3線分53の長さL3のH倍となる。このスケールファクターHは、ユーザー2のスイング動作中のゴルフクラブ3の軌跡がホーガンプレーンHPに収まるような値に設定される。例えば、ホーガンプレーンHPは、シャフトプレーンSPと同じ形及び大きさとしてもよい。この場合、ホーガンプレーンHPのX軸と直交する方向の幅H×L3が、シャフトプレーンSPのX軸と直交する方向の幅S×L1と一致し、ゴルフクラブ3のシャフトの長さL1とユーザー2の腕の長さL2の和の2倍となる。従って、スイング解析部211は、スケールファクターHを式(15)により、計算することができる。
また、スイング解析部211は、所定位置63のY座標AY及びZ座標AZを用いて、式(13)により、第3線分53の長さL3を計算することができる。
次に、処理部21は、中点H3の座標(0,HY,HZ)及びホーガンプレーンHPのX軸方向の幅(第1線分51の長さ)ULを用いて、ホーガンプレーンHPの頂点H1の座標(−UL/2,HY,HZ)、H2の座標(UL/2,HY,HZ)を計算する。なお、ホーガンプレーンHPの2つの頂点U1,U2はシャフトプレーンSPと共通するため、スイング解析部211は、ホーガンプレーンHPの頂点U1,U2の座標をあらためて計算する必要はない。
このようにして、スイング解析部211は、ホーガンプレーンHPの4つの頂点U1,U2,H1,H2の座標を算出することができる。
シャフトプレーンSP(第1仮想面)とホーガンプレーンHP(第2仮想面)により挟まれる領域は「Vゾーン」と呼ばれ、バックスイング中やダウンスイング中のゴルフクラブ3のヘッドの位置とVゾーンとの関係により、打球の軌道(球筋)をある程度推測することができる。例えば、バックスイングあるいはダウンスイング中の所定のタイミングで
ゴルフクラブ3のヘッドがVゾーンよりも低い空間に存在する場合はフック系の打球となりやすい。また、バックスイングあるいはダウンスイング中の所定のタイミングでゴルフクラブ3のヘッドがVゾーンよりも高い空間に存在する場合はスライス系の打球となりやすい。本実施形態では、図16から明らかなように、シャフトプレーンSPとホーガンプレーンHPとのなす第1角度βは、ゴルフクラブ3のシャフトの長さL1とユーザー2の腕の長さL2に応じて決定される。すなわち、第1角度βは、固定値ではなく、ゴルフクラブ3の種類やユーザー2の身体に応じて決まるので、ユーザー2のスイングを診断する指標としてより適切なシャフトプレーンSP及びホーガンプレーンHP(Vゾーン)が算出される。
ゴルフクラブ3のヘッドがVゾーンよりも低い空間に存在する場合はフック系の打球となりやすい。また、バックスイングあるいはダウンスイング中の所定のタイミングでゴルフクラブ3のヘッドがVゾーンよりも高い空間に存在する場合はスライス系の打球となりやすい。本実施形態では、図16から明らかなように、シャフトプレーンSPとホーガンプレーンHPとのなす第1角度βは、ゴルフクラブ3のシャフトの長さL1とユーザー2の腕の長さL2に応じて決定される。すなわち、第1角度βは、固定値ではなく、ゴルフクラブ3の種類やユーザー2の身体に応じて決まるので、ユーザー2のスイングを診断する指標としてより適切なシャフトプレーンSP及びホーガンプレーンHP(Vゾーン)が算出される。
[ハーフウェイバック時及びハーフウェイダウン時のヘッド位置の算出]
ハーフウェイバック時のヘッド位置は、ハーフウェイバックの瞬間、直前又は直後のヘッドの位置であり、ハーフウェイダウン時のヘッド位置は、ハーフウェイバックの瞬間、直前又は直後のヘッドの位置である。
ハーフウェイバック時のヘッド位置は、ハーフウェイバックの瞬間、直前又は直後のヘッドの位置であり、ハーフウェイダウン時のヘッド位置は、ハーフウェイバックの瞬間、直前又は直後のヘッドの位置である。
まず、スイング解析部211は、スイング開始の時刻tstartからインパクトの時刻timpactまでの各時刻tにおけるセンサーユニット10の位置及び姿勢を用いて、各時刻tにおけるヘッドの位置及びグリップエンドの位置を計算する。
具体的には、スイング解析部211は、各時刻tにおいて、センサーユニット10の位置から、センサーユニット10の姿勢により特定されるy軸の正の方向に距離LSHだけ離れた位置をヘッドの位置とし、ヘッドの位置の座標を計算する。前述の通り、距離LSHは、センサーユニット10とヘッドとの距離である。また、スイング解析部211は、各時刻tにおいて、センサーユニット10の位置から、センサーユニット10の姿勢により特定されるy軸の負の方向に距離LSGだけ離れた位置をグリップエンドの位置とし、グリップエンドの位置の座標を計算する。前述の通り、距離LSGは、センサーユニット10とグリップエンドとの距離である。
次に、スイング解析部211は、ヘッドの位置の座標とグリップエンドの位置の座標とを用いて、ハーフウェイバックのタイミングとハーフウェイダウンのタイミングを検出する。
具体的には、スイング解析部211は、スイング開始の時刻tstartからインパクトの時刻timpactまでの各時刻tにおけるヘッドの位置のZ座標とグリップエンドの位置のZ座標との差分ΔZを計算する。そして、スイング解析部211は、スイング開始の時刻tstartからトップの時刻ttopまでの間でΔZの符号が反転する時刻tHWBをハーフウェイバックのタイミングとして検出する。また、スイング解析部211は、トップの時刻ttopからインパクトの時刻timpactまでの間でΔZの符号が反転する時刻tHWDをハーフウェイダウンのタイミングとして検出する。
そして、スイング解析部211は、時刻tHWBにおけるヘッドの位置をハーフウェイバック時のヘッドの位置とし、時刻tHWDにおけるヘッドの位置をハーフウェイダウン
時のヘッドの位置とする。
時のヘッドの位置とする。
[ヘッドスピードの算出]
ヘッドスピードは、インパクトのとき(インパクトの瞬間、インパクトの直前又はインパクトの直後)のヘッドの速度の大きさである。例えば、スイング解析部211は、インパクトの時刻timpactにおけるヘッドの位置の座標とその1つ前の時刻におけるヘッドの位置の座標との差分により、インパクトの時刻timpactにおけるヘッドの速度を計算する。そして、スイング解析部211は、ヘッドスピードとして当該ヘッドの速
度の大きさを計算する。
ヘッドスピードは、インパクトのとき(インパクトの瞬間、インパクトの直前又はインパクトの直後)のヘッドの速度の大きさである。例えば、スイング解析部211は、インパクトの時刻timpactにおけるヘッドの位置の座標とその1つ前の時刻におけるヘッドの位置の座標との差分により、インパクトの時刻timpactにおけるヘッドの速度を計算する。そして、スイング解析部211は、ヘッドスピードとして当該ヘッドの速
度の大きさを計算する。
[フェース角及びクラブパス(入射角)の算出]
フェース角は、インパクトにおけるゴルフクラブ3のヘッドの傾きに基づく指標であり、クラブパス(入射角)は、インパクトにおけるゴルフクラブ3のヘッドの軌道に基づく指標である。
フェース角は、インパクトにおけるゴルフクラブ3のヘッドの傾きに基づく指標であり、クラブパス(入射角)は、インパクトにおけるゴルフクラブ3のヘッドの軌道に基づく指標である。
図17は、フェース角とクラブパス(入射角)を説明するための図である。図17には、XYZ座標系でZ軸の正側から視たXY平面上でのゴルフクラブ3(ヘッドのみ図示)が示されている。図17において、74はゴルフクラブ3のフェース面(打撃面)であり、75は打球点である。70は打球の目標方向を示すターゲットラインであり、71はターゲットライン70に直交する平面である。また、76はゴルフクラブ3のヘッドの軌跡を表す曲線であり、72は曲線76に対する打球点75での接線である。この時、フェース角φは平面71とフェース面74とのなす角であり、換言すれば、フェース面74と直交する直線73とターゲットライン70とのなす角である。また、クラブパス(入射角)ψは接線72(XY平面におけるヘッドが打球点75を通過する方向)とターゲットライン70とのなす角である。
例えば、スイング解析部211は、ヘッドのフェース面とx軸方向とのなす角度が常に一定である(例えば、直交する)ものとして、インパクトの時刻timpactにおけるセンサーユニット10の姿勢から、フェース面に直交する直線の向きを計算する。そして、スイング解析部211は、当該直線の向きのZ軸成分を0としたものを直線73の向きとし、直線73とターゲットライン70とのなす角(フェース角)φを計算する。
また、例えば、スイング解析部211は、インパクトの時刻timpactにおけるヘッドの速度のZ軸成分を0とした速度(すなわち、XY平面におけるヘッドの速度)の向きを接線72の向きとし、接線72とターゲットライン70とのなす角(クラブパス(入射角))ψを計算する。
なお、フェース角φは、ヘッドの打球点75への入射方向と関係なく向きが固定されているターゲットライン70を基準とするフェース面74の傾きを表すため、絶対フェース角とも呼ばれる。これに対して、直線73と接線72とのなす角ηは、ヘッドの打球点75への入射方向を基準とするフェース面74の傾きを表すため、相対フェース角と呼ばれる。相対フェース角ηは、(絶対)フェース角φからクラブパス(入射角)ψを減算した角度である。
[アタック角の算出]
アタック角は、クラブパス(入射角)と同様、インパクト時刻timpactにおけるゴルフクラブ3のヘッドの軌道に基づく指標である。但し、アタック角は、軌道の角度をクラブパス(入射角)とは異なる平面において計算したものである。
アタック角は、クラブパス(入射角)と同様、インパクト時刻timpactにおけるゴルフクラブ3のヘッドの軌道に基づく指標である。但し、アタック角は、軌道の角度をクラブパス(入射角)とは異なる平面において計算したものである。
スイング解析部211は、インパクト時刻timpactにおけるヘッドの速度ベクト
ルとZ軸とがXZ平面でなす角を、アタック角として計算する。例えば、インパクト時刻timpactにおけるヘッドの移動方向がいわゆるアッパーブローの方向であるときに、アタック角は正の値となり、いわゆるダウンブローであるときにアタック角は負の値となり、いわゆるレベルブローの方向であるときにアタック角はゼロとなる。
ルとZ軸とがXZ平面でなす角を、アタック角として計算する。例えば、インパクト時刻timpactにおけるヘッドの移動方向がいわゆるアッパーブローの方向であるときに、アタック角は正の値となり、いわゆるダウンブローであるときにアタック角は負の値となり、いわゆるレベルブローの方向であるときにアタック角はゼロとなる。
[スイングリズムの算出]
スイングリズムは、スイングの各区間の所要時間の比率を示す指標である。
スイングリズムは、スイングの各区間の所要時間の比率を示す指標である。
スイング解析部211は、例えば、スイング全体の期間を、スイング開始時刻tstart、ハーフウェイバック時刻tHWB、トップ時刻ttop、ハーフウェイダウン時刻tHWD、グリップ減速開始時刻tvmax、インパクト時刻timpactで区切ることにより、スイング全体の期間を複数の区間に分割し、各区間の所要時間を計算する。
そして、スイング解析部211は、互いに異なる2つの区間の所要時間の比率を、スイングリズムとして計算する。互いに異なる2つの区間は、互いに重複しない2つの区間であってもよいし、一方が他方を包含する関係を有する2つの区間であってもよい。また、互いに異なる2つの区間は、ユーザー2によって予め指定された2つの区間であってもよい。
例えば、スイング解析部211は、バックスイングの所要時間(スイング開始時刻tstartからトップ時刻ttopまでの区間の所要時間)を、ダウンスイングの所要時間(トップ時刻ttopからインパクト時刻timpactまでの区間の所要時間)で除してできる比率を、スイングリズムとして計算する。
[ハンドアップ角の算出]
ハンドアップ角は、スイング開始時刻tstartとインパクト時刻timpactとの間におけるシャフトの姿勢ずれを示す指標の1つであって、スイング開始時刻tstartにおけるシャフトのライ角方向の傾斜角α(tstart)と、インパクト時刻timpactにおけるシャフトのライ角方向の傾斜角α(timpact)とのずれを示す指標である。なお、スイング開始時刻tstartにおけるシャフトのライ角方向の傾斜角α(tstart)の代わりに、アドレス時刻taddressにおけるシャフトのライ角方向の傾斜角α(taddress)を用いることもできる。また、ライ角方向の傾斜角αとは、図10において符号αで示した角度のことであって、YZ平面においてy軸とY軸とが成す角度である。
ハンドアップ角は、スイング開始時刻tstartとインパクト時刻timpactとの間におけるシャフトの姿勢ずれを示す指標の1つであって、スイング開始時刻tstartにおけるシャフトのライ角方向の傾斜角α(tstart)と、インパクト時刻timpactにおけるシャフトのライ角方向の傾斜角α(timpact)とのずれを示す指標である。なお、スイング開始時刻tstartにおけるシャフトのライ角方向の傾斜角α(tstart)の代わりに、アドレス時刻taddressにおけるシャフトのライ角方向の傾斜角α(taddress)を用いることもできる。また、ライ角方向の傾斜角αとは、図10において符号αで示した角度のことであって、YZ平面においてy軸とY軸とが成す角度である。
スイング解析部211は、例えば、スイング開始時刻tstartにおけるゴルフクラブ3の姿勢(グローバル座標で表された姿勢)に基づき、スイング開始時における傾斜角α(tstart)を算出する。
また、スイング解析部211は、例えば、インパクト時刻timpactにおけるゴルフクラブ3の姿勢(グローバル座標で表された姿勢)に基づき、インパクト時刻timpactにおける傾斜角α(timpact)を算出する。
また、スイング解析部211は、例えば、アドレス時刻taddressにおけるz軸加速度成分azとy軸加速度成分ayとの比(ay/az)に基づき、アドレス時刻taddressにおける傾斜角α(taddress)を算出する。なお、スイング解析部211は、y軸加速度成分ayを式(1)における「y(0)」へ当てはめることでアドレス時刻における傾斜角α(taddress)を求めることもできる。
また、スイング解析部211は、例えば、インパクト時刻timpactにおける傾斜
角α(timpact)からスイング開始時刻tstartにおける傾斜角α(tstart)を減算することにより、ハンドアップ角Δα=α(timpact)−α(tstart)を算出する。
角α(timpact)からスイング開始時刻tstartにおける傾斜角α(tstart)を減算することにより、ハンドアップ角Δα=α(timpact)−α(tstart)を算出する。
また、スイング解析部211は、例えば、インパクト時刻timpactにおける傾斜角α(timpact)からアドレス時刻taddressにおける傾斜角α(taddress)を減算することにより、ハンドアップ角Δα=α(timpact)−α(taddress)を算出してもよい。
[トップ時のシャフト軸回転角の算出]
トップ時のシャフト軸回転角θtopは、基準となるタイミングからトップのタイミングまでにゴルフクラブ3がシャフト軸回りに回転した角度(相対回転角)である。基準となるタイミングは、例えば、バックスイング開始時又はアドレス時である。本実施形態では、ユーザー2が右打ちの場合は、ゴルフクラブ3のヘッド側に先端を向けた右ねじの締め方向(グリップエンド側からヘッド側を視たときに時計回りの方向)をシャフト軸回転角θtopの正方向とする。逆に、ユーザー2が左打ちの場合は、ゴルフクラブ3のヘッド側に先端を向けた左ねじの締め方向(グリップエンド側からヘッド側を視たときに反時計回りの方向)をシャフト軸回転角θtopの正方向とする。
トップ時のシャフト軸回転角θtopは、基準となるタイミングからトップのタイミングまでにゴルフクラブ3がシャフト軸回りに回転した角度(相対回転角)である。基準となるタイミングは、例えば、バックスイング開始時又はアドレス時である。本実施形態では、ユーザー2が右打ちの場合は、ゴルフクラブ3のヘッド側に先端を向けた右ねじの締め方向(グリップエンド側からヘッド側を視たときに時計回りの方向)をシャフト軸回転角θtopの正方向とする。逆に、ユーザー2が左打ちの場合は、ゴルフクラブ3のヘッド側に先端を向けた左ねじの締め方向(グリップエンド側からヘッド側を視たときに反時計回りの方向)をシャフト軸回転角θtopの正方向とする。
図18は、スイング開始(バックスイング開始)からインパクトまでのシャフト軸回転角の時間変化の一例を示す図である。図18において、横軸は時間(s)、縦軸はシャフト軸回転角(deg)である。図18には、スイング開始時(バックスイング開始時)を基準のタイミング(シャフト軸回転角が0°)としたトップ時のシャフト軸回転角θtopが示されている。
本実施形態では、図3に示したように、センサーユニット10のy軸がゴルフクラブ3のシャフトの長手方向(ゴルフクラブ3の長手方向)にほぼ一致している。従って、例えば、スイング解析部211は、スイング開始の時刻tstart(バックスイング開始時)又はアドレス時からトップの時刻ttop(トップ時)まで、角速度データに含まれるy軸角速度を時間積分することで、シャフト軸回転角θtopを計算する。同様に、スイング解析部211は、スイング開始の時刻tstart(バックスイング開始時)又はアドレス時からハーフウェイバック時刻tHWBまで、角速度データに含まれるy軸角速度を時間積分することで、ハーフウェイバック時刻tHWBにおけるシャフト軸回転角θHWBを計算する。
[グリップ減速率及びグリップ減速時間率の算出]
グリップ減速率は、グリップの減速量に基づく指標であり、ダウンスイング中にグリップが減速し始めるときのグリップの速度と、インパクトのときのグリップの速度との比である。また、グリップ減速時間率は、グリップの減速期間に基づく指標であり、ダウンスイング中にグリップが減速し始めてからインパクトまでの時間と、ダウンスイングの時間との比である。グリップの速度は、ユーザー2が把持している部分の速度であることが望ましいが、グリップの任意の部分(例えば、グリップエンド)の速度であってもよいし、グリップ付近の部分の速度であってもよい。
グリップ減速率は、グリップの減速量に基づく指標であり、ダウンスイング中にグリップが減速し始めるときのグリップの速度と、インパクトのときのグリップの速度との比である。また、グリップ減速時間率は、グリップの減速期間に基づく指標であり、ダウンスイング中にグリップが減速し始めてからインパクトまでの時間と、ダウンスイングの時間との比である。グリップの速度は、ユーザー2が把持している部分の速度であることが望ましいが、グリップの任意の部分(例えば、グリップエンド)の速度であってもよいし、グリップ付近の部分の速度であってもよい。
図19は、ダウンスイングにおけるグリップの速度の時間変化の一例を示す図である。図19において、横軸は時間(s)、縦軸はグリップの速度(m/s)である。図19において、グリップが減速を開始するときのグリップの速度(グリップの最大速度)をV1、インパクトのときのグリップの速度をV2とすると、グリップ減速率RV(単位:%)は、次の式(16)で表される。
また、図19において、トップからグリップが減速を開始するまでの時間をT1、グリップが減速を開始してからインパクトまでの時間をT2とすると、グリップ減速時間率RT(単位:%)は、次の式(17)で表される。
例えば、ユーザー2がゴルフクラブ3を把持する部分の近くにセンサーユニット10が取り付けられるものとして、センサーユニット10の速度をグリップの速度とみなしてもよい。従って、まず、スイング解析部211は、トップの時刻ttopからインパクトの時刻timpactまで(ダウンスイング中)の各時刻tにおけるセンサーユニット10の位置の座標とその1つ前の時刻におけるセンサーユニット10の位置の座標との差分により、各時刻tにおけるセンサーユニット10の速度を計算する。
次に、スイング解析部211は、各時刻tにおけるセンサーユニット10の速度の大きさを計算し、その最大値をV1、インパクトの時刻timpactにおける速度の大きさをV2とする。また、スイング解析部211は、センサーユニット10の速度の大きさが最大値V1となる時刻tvmaxを特定する。さらに、スイング解析部211は、T1=tvmax−ttop、T2=timpact−tvmaxを計算する。そして、スイング解析部211は、式(16),式(17)により、それぞれグリップ減速率RV,グリップ減速時間率RTを計算する。
なお、スイング解析部211は、グリップエンドの速度をグリップの速度とみなし、ダウンスイング中)の各時刻tにおけるグリップエンドの位置の座標に基づき、グリップエンドの速度を計算し、上記と同様の計算により、グリップ減速率RV及びグリップ減速時間率RTを求めてもよい。
[「Vゾーン」項目の指標の算出]
スイング解析部211は、ハーフウェイバック時刻tHWBにヘッド位置の属していた領域と、ハーフウェイダウン時刻tHWDにヘッド位置の属していた領域と、グリップ減速開始時刻tvmaxにヘッド位置の属していた領域と、トップ時刻ttopにヘッド位置の属していた領域とを、指標として算出する。複数の領域の境界は、ユーザー2のアドレス姿勢によって決まる仮想面であるシャフトプレーンSP及びホーガンプレーンHP(Vゾーン)に基づいて決定される。
スイング解析部211は、ハーフウェイバック時刻tHWBにヘッド位置の属していた領域と、ハーフウェイダウン時刻tHWDにヘッド位置の属していた領域と、グリップ減速開始時刻tvmaxにヘッド位置の属していた領域と、トップ時刻ttopにヘッド位置の属していた領域とを、指標として算出する。複数の領域の境界は、ユーザー2のアドレス姿勢によって決まる仮想面であるシャフトプレーンSP及びホーガンプレーンHP(Vゾーン)に基づいて決定される。
図20は、シャフトプレーンSP及びホーガンプレーンHP(Vゾーン)と複数の領域との関係の一例を示す図である(なお、図20の下部には、シャフトプレーンSP及びホーガンプレーンHPとユーザー2の姿勢との概略の一例を示した。)。図20は、X軸の負側から視た(YZ平面に投影した)場合の、シャフトプレーンSP、ホーガンプレーンHP及び5つの領域A〜Eの関係を示している。領域Bは、ホーガンプレーンHPを含む所定の空間であり、領域Dは、シャフトプレーンSPを含む所定の空間である。領域Cは、領域Bと領域Dとに挟まれている空間(領域Bとの境界面SBCと領域Dとの境界面S
CDとの間の空間)である。領域Aは、領域Cと反対側の境界面SABで領域Bと接する空間である。領域Eは、領域Cと反対側の境界面SDEで領域Dと接する空間である。
CDとの間の空間)である。領域Aは、領域Cと反対側の境界面SABで領域Bと接する空間である。領域Eは、領域Cと反対側の境界面SDEで領域Dと接する空間である。
境界面SAB、境界面SBC、境界面SCD及び境界面SDEの設定方法は、種々考えられる。一例を挙げると、YZ平面上において、ホーガンプレーンHPが境界面SABと境界面SBCのちょうど真ん中になり、かつ、シャフトプレーンSPが境界面SCDと境界面SDEのちょうど真ん中になり、かつ、領域B、領域C、領域Dの原点O(X軸)周りの角度が等しくなるように設定することができる。すなわち、シャフトプレーンSPとホーガンプレーンHPとのなす第1角度βに対して、ホーガンプレーンHPと境界面SAB及び境界面SBCとのなす角をそれぞれβ/4に設定し、シャフトプレーンSPと境界面SCD及び境界面SDEとのなす角をそれぞれβ/4に設定すれば、領域B、領域C、
領域Dの角度がともにβ/2に設定される。
領域Dの角度がともにβ/2に設定される。
なお、ハーフウェイバック時やハーフウェイダウン時のヘッド位置のY座標が負となるようなスイングは想定できないので、図20では、領域Aの境界面SABと反対側の境界面はXZ平面に設定されている。同様に、ハーフウェイバック時やハーフウェイダウン時のヘッド位置のZ座標が負となるようなスイングは想定できないので、領域Eの境界面SDEと反対側の境界面はXY平面に設定されている。もちろん、領域Aや領域Eの原点O(X軸)周りの角度も領域B、領域C、領域Dと等しくなるように、領域Aや領域Eの境界面を設定してもよい。
具体的には、まず、スイング解析部211は、シャフトプレーンSPの4つの頂点U1,U2,S1,S2の各座標及びホーガンプレーンHPの4つの頂点U1,U2,H1,H2の各座標に基づき、領域A〜Eの各境界面SAB、境界面SBC、境界面SCD及び境界面SDEを設定する。
次に、スイング解析部211は、ハーフウェイバック時刻tHWBのヘッド位置の座標、ハーフウェイダウン時刻tHWDのヘッド位置の座標、グリップ減速開始時刻tvmaxのヘッドの位置の座標、トップ時刻ttopのヘッドの位置の座標がそれぞれ領域A〜Eのいずれに属するかを判定する。
[スイング解析処理の手順]
図21は、処理部21によるスイング解析処理の手順の一例を示すフローチャート図である。処理部21は、記憶部24に記憶されているスイング解析プログラム240を実行することにより、例えば、図21のフローチャートの手順でスイング解析処理を実行する。以下、図21のフローチャートについて説明する。
図21は、処理部21によるスイング解析処理の手順の一例を示すフローチャート図である。処理部21は、記憶部24に記憶されているスイング解析プログラム240を実行することにより、例えば、図21のフローチャートの手順でスイング解析処理を実行する。以下、図21のフローチャートについて説明する。
まず、処理部21は、ユーザー2による計測開始操作(図4のステップS2の操作)が行われるまで待機し(S10のN)、計測開始操作が行われると(S10のY)、センサーユニット10に計測開始コマンドを送信し、センサーユニット10から計測データの取得を開始する(S12)。
次に、処理部21は、ユーザー2にアドレス姿勢をとるように指示する(S14)。ユーザー2は、この指示に従い、アドレス姿勢をとって静止する(図4のステップS4)。
次に、処理部21は、センサーユニット10から取得した計測データを用いてゴルフクラブ3が正しい姿勢で所定期間に亘って静止したか否かを判定(S16)し、静止した場合(S16Y)に、ユーザー2へスイング開始の許可を通知し(S18)、そうでない場合は、終了判定処理(S24)へ移行する。なお、処理部21は、例えば、所定の音を出力し、あるいは、センサーユニット10にLEDを設けておいて当該LEDを点灯させる
等して、ユーザー2にスイング開始の許可を通知し、ユーザー2は、この通知を確認した後にスイング動作(図4のステップS6の動作)を開始する。
等して、ユーザー2にスイング開始の許可を通知し、ユーザー2は、この通知を確認した後にスイング動作(図4のステップS6の動作)を開始する。
次に、処理部21は、センサーユニット10から取得した計測データに基づきスイングの許可(S18)から所定期間内にインパクトを検出したか否かを判定し(S20)、検出した場合(S20Y)には、スイング解析データの生成処理(S22)へ移行し、そうでない場合(S20N)には、終了判定処理(S24)へ移行する。
次に、処理部21は、センサーユニット10から取得した計測データからインパクト前後におけるスイング中の計測データを抽出し、当該スイング中の計測データに基づき各種の指標及び軌跡を算出すると、当該指標及び軌跡を含むスイング解析データを生成してサーバー装置30へ送信する(S22)。なお、処理部21は、スイング中の計測データに関するバイアスの補正及びグローバル座標の設定に、ゴルフクラブ3が正しい姿勢で静止していた期間中の計測データを用いる。また、処理部21は、サーバー装置30へ送信するスイング解析データに対してスイング中の計測データ自体(いわゆる生データ)を含めてもよい。
次に、処理部21は、ユーザー2による計測終了操作が行われたか否かを判定し(S24)、行われた場合(S24Y)にはフローを終了し、そうでない場合(S24N)には、アドレス指示処理(S14)へ移行する。
なお、図21のフローチャートにおいて、可能な範囲で各工程の順番を適宜変えてもよいし、一部の工程を削除あるいは変更してもよいし、他の工程を追加してもよい。
1−4.サーバー装置の構成
図22は、サーバー装置30の構成例を示す図である。図22に示すように、本実施形態では、サーバー装置30は、処理部31、通信部32及び記憶部34を含んで構成されている。ただし、サーバー装置30は、適宜、これらの構成要素の一部が削除又は変更され、あるいは、他の構成要素が付加された構成であってもよい。
図22は、サーバー装置30の構成例を示す図である。図22に示すように、本実施形態では、サーバー装置30は、処理部31、通信部32及び記憶部34を含んで構成されている。ただし、サーバー装置30は、適宜、これらの構成要素の一部が削除又は変更され、あるいは、他の構成要素が付加された構成であってもよい。
記憶部34は、例えば、ROMやフラッシュROM、RAM等の各種ICメモリーやハードディスクやメモリーカードなどの記録媒体等により構成される。記憶部34は、処理部31が各種の計算処理や制御処理を行うためのプログラムや、アプリケーション機能を実現するための各種プログラムやデータ等を記憶している。
本実施形態では、記憶部34には、スイング解析装置20が生成した複数のスイング解析データ248を含むスイング解析データリスト341が記憶(保存)されている。すなわち、スイング解析装置20の処理部21がユーザー2のスイング動作を解析する毎に生成したスイング解析データ248は、順次、スイング解析データリスト341に追加される。
また、記憶部34は、処理部31の作業領域として用いられ、処理部31が各種プログラムに従って実行した演算結果等を一時的に記憶する。さらに、記憶部34は、処理部31の処理により生成されたデータのうち、長期的な保存が必要なデータを記憶してもよい。
通信部32は、ネットワーク40を介してスイング解析装置20の通信部27(図9参照)との間でデータ通信を行うものである。例えば、通信部32は、スイング解析装置20の通信部27からスイング解析データ248を受け取って、処理部31に送る処理を行う。また、例えば、通信部32は、図7の選択画面の表示に必要な情報をスイング解析装
置20の通信部27に送信する処理や、図7の選択画面における選択情報をスイング解析装置20の通信部27から受信して処理部31に送る処理を行う。また、例えば、通信部32は、図8の表示画面の表示に必要な情報を処理部31から受け取ってスイング解析装置20の通信部27に送信する処理を行う。
置20の通信部27に送信する処理や、図7の選択画面における選択情報をスイング解析装置20の通信部27から受信して処理部31に送る処理を行う。また、例えば、通信部32は、図8の表示画面の表示に必要な情報を処理部31から受け取ってスイング解析装置20の通信部27に送信する処理を行う。
処理部31は、各種プログラムに従い、通信部32を介してスイング解析装置20からスイング解析データ248を受信して、記憶部34に記憶させる(スイング解析データリスト341に追加する)処理を行う。また、処理部31は、各種プログラムに従い、通信部32を介して、スイング解析装置20から各種の情報を受信し、各種の画面(図7、図8の各画面等)の表示に必要な情報をスイング解析装置20に送信する処理等を行う。また、処理部31は、その他の各種の制御処理を行う。
特に、本実施形態では、処理部31は、所定のプログラムを実行することにより、データ取得部310、記憶処理部312として機能する。
データ取得部310は、通信部32がスイング解析装置20から受信したスイング解析データ248を受け取って記憶処理部312に送る処理を行う。
記憶処理部312は、記憶部34に対する各種プログラムや各種データのリード/ライト処理を行う。例えば、記憶処理部312は、データ取得部310からスイング解析データ248を受け取り、記憶部34に記憶させる(スイング解析データリスト341に追加する)処理や、記憶部34に記憶されているスイング解析データリスト341からスイング解析データ248を読み出す処理等を行う。
1−5.サーバー装置の処理
サーバー装置30の処理部31は、スイング解析装置20との間でデータの送受信を行い、ユーザーのスイング解析データをユーザーごとに管理する。
サーバー装置30の処理部31は、スイング解析装置20との間でデータの送受信を行い、ユーザーのスイング解析データをユーザーごとに管理する。
[サーバー装置の処理の手順]
図23は、サーバー装置の処理と関連するスイング解析装置20の処理部21による処理の手順の一例を示すフローチャート図である。また、図24は、サーバー装置の処理の手順の一例を示すフローチャート図である。サーバー装置30の処理部31(コンピューターの一例)は、記憶部34に記憶されているプログラムを実行することにより、例えば、図24のフローチャートの手順で処理を実行する。以下、図23及び図24のフローチャートについて説明する。
図23は、サーバー装置の処理と関連するスイング解析装置20の処理部21による処理の手順の一例を示すフローチャート図である。また、図24は、サーバー装置の処理の手順の一例を示すフローチャート図である。サーバー装置30の処理部31(コンピューターの一例)は、記憶部34に記憶されているプログラムを実行することにより、例えば、図24のフローチャートの手順で処理を実行する。以下、図23及び図24のフローチャートについて説明する。
まず、スイング解析装置20の処理部21は、サーバー装置30に、ユーザー2に割り当てられたユーザー識別情報を送信する(図23のS100)。
次に、サーバー装置30の処理部31は、ユーザー識別情報を受信し、ユーザー識別情報に対応するスイング解析データ248の一覧情報を送信する(図24のS200)。
次に、スイング解析装置20の処理部21は、スイング解析データ248の一覧情報を受信し、表示部25にスイング解析データの選択画面(図7)を表示させる(図23のS110)。
そして、スイング解析装置20の処理部21は、スイング解析データの選択画面においてスイング解析データ248が選択されるまで待機し(図23のS120のN)、選択されると(図23のS120のY)、サーバー装置30にスイング解析データの選択情報を送信する(図23のS130)。
次に、サーバー装置30の処理部31は、スイング解析データの選択情報を受信する(図24のS210)。
次に、サーバー装置30の処理部31は、選択されたスイング解析データを送信する(図24のS240)。
次に、スイング解析装置20の処理部21は、選択されたスイング解析データを受信し、スイング解析データに基づく画像(各種の指標を示す画像、スイングの軌跡を示す画像など)を表示部25に表示させ(図23のS140)、処理を終了する。
なお、図23のフローチャートにおいて、可能な範囲で各工程の順番を適宜変えてもよいし、一部の工程を削除あるいは変更してもよいし、他の工程を追加してもよい。同様に、図24のフローチャートにおいて、可能な範囲で各工程の順番を適宜変えてもよいし、一部の工程を削除あるいは変更してもよいし、他の工程を追加してもよい。
1−6.Vゾーン項目について
1−6−1.Vゾーン項目の点数及び診断情報
本実施形態のスイング解析装置20は、スイング解析データとして、前述したVゾーン項目の指標(4つの指標)を算出すると共に、それら4つの指標に基づきVゾーン項目の点数及びVゾーン項目の診断情報を取得する。Vゾーン項目の4つの指標を改めて説明すると、以下の(1)乃至(4)のとおりである。
1−6−1.Vゾーン項目の点数及び診断情報
本実施形態のスイング解析装置20は、スイング解析データとして、前述したVゾーン項目の指標(4つの指標)を算出すると共に、それら4つの指標に基づきVゾーン項目の点数及びVゾーン項目の診断情報を取得する。Vゾーン項目の4つの指標を改めて説明すると、以下の(1)乃至(4)のとおりである。
(1)領域A乃至Eのうち、ハーフウェイバック時刻tHWBにヘッド位置が属していた領域(時刻tHWBは、バックスイング中に運動具の長手方向が水平面に沿うタイミングの一例である。)。
(2)領域A乃至Eのうち、トップ時刻ttopにヘッド位置が属していた領域(時刻ttopはトップのタイミングの一例である。)。
(3)領域A乃至Eのうち、グリップ減速開始時刻tvmax(ナチュラルアンコックポイント)にヘッド位置が属していた領域(時刻tvmaxはダウンスイング中に運動具の把持部が減速し始めるタイミングの一例である。)。
(4)領域A乃至Eのうち、ハーフウェイダウン時刻tHWDにヘッド位置が属していた領域(時刻tvmaxはダウンスイング中にダウンスイング中に運動具の長手方向が水平面に沿うタイミングの一例である。)。
そして、スイング解析装置20の記憶部24は、図25に示すようなVゾーン対応表を予め記憶する。
図25に示すように、Vゾーン対応表は、Vゾーン項目の4つの指標を時系列順に並べた配列パターン(以下、「領域の配列パターン」という。)ごとに点数及び診断情報を割り当てている。
例えば、図25のVゾーン対応表では、領域の配列パターン「A−A−A−A」に割り当てられた点数は、PV1であり、領域の配列パターン「A−A−A−A」に割り当てられた診断情報は、LV1である。
ここで、図25のVゾーン対応表において、領域の配列パターンごとの点数(スコア、
レベル)及び診断情報は、様々なスイングについての領域の配列パターンと、様々なスイングについての打球の軌道の傾向との関係に基づき予め設定されている。
レベル)及び診断情報は、様々なスイングについての領域の配列パターンと、様々なスイングについての打球の軌道の傾向との関係に基づき予め設定されている。
例えば、軌道がターゲットラインから外れやすいスイングについての領域の配列パターンには相対的に低い点数が割り当てられ、軌道がターゲットラインから外れにくいスイングについての領域の配列パターンには相対的に高い点数が割り当てられる。例えば、軌道がターゲットラインから最も外れにくいスイングについての領域の配列パターン(例えば「C−C−C−C」)には、最高点(5点)が割り当てられ、軌道がターゲットラインから最も外れやすいスイングについての領域の配列パターンには、最低点(1点)が割り当てられる。
また、例えば、軌道がフックになり易いスイングについての領域の配列パターンにはスイングタイプがフック系である旨を示す診断情報が割り当てられ、軌道がスライスになり易いスイングについての領域の配列パターンには、スイングタイプがスライス系である旨を示す診断情報が割り当てられる。
ところで、理想的なスイング又は標準的なスイングによると、上記4つの時刻tHWB、ttop、tvmax、tHWDを時系列順(タイミングの到来順)に並べた配列パターン(以下、「タイミングの配列パターン」という。)は、図25に示すとおり「tHWB−ttop−tvmax−tHWD」となる。しかし、理想的でないスイングによると、タイミングの配列パターンが「tHWB−ttop−tHWD−tvmax」となる場合もある。
このため、タイミングの配列パターンが「tHWB−ttop−tHWD−tvmax」である場合には、タイミングの配列パターンが「tHWB−ttop−tvmax−tHWD」である場合よりも、低い点数が割り当てられることが望ましい。また、タイミングの配列パターンが「tHWB−ttop−tHWD−tvmax」である場合には、手首の減速開始タイミングが理想的なタイミングよりも遅延している旨を示す診断情報が割り当てられることが望ましい。
このような割り当てを行うために、例えば、記憶部24には、Vゾーン対応表として、タイミングの配列パターンが「tHWB−ttop−tvmax−tHWD」であるときに適用される対応表(以下、「第1のVゾーン対応表」という。)と、タイミングの配列パターンが「tHWB−ttop−tHWD−tvmax」であるときに適用される対応表(以下、「第2のVゾーン対応表」という。)との2種類が用意される。なお、第2のVゾーン対応表の図示は省略した。
1−6−2.点数及び診断情報の取得処理
スイング解析装置20のスイング解析部211は、上述したステップS22(図21)において、Vゾーン項目の点数及び診断情報を例えば以下の手順(1)乃至(4)によって取得する。
スイング解析装置20のスイング解析部211は、上述したステップS22(図21)において、Vゾーン項目の点数及び診断情報を例えば以下の手順(1)乃至(4)によって取得する。
(1)スイング解析部211は、Vゾーン項目の4つの時刻に基づきタイミングの配列パターンが「tHWB−ttop−tvmax−tHWD」と「tHWB−ttop−tHWD−tvmax」との何れであるかを判定する。
(2)スイング解析部211は、手順(1)の判定結果とVゾーン項目の4つの指標とに基づき領域の配列パターンを認識する。
(3)タイミングの配列パターンが「tHWB−ttop−tvmax−tHWD」で
ある場合、スイング解析部211は、領域の配列パターンに応じて第1のVゾーン対応表を参照することによりVゾーン項目の点数及び診断情報を取得する。
ある場合、スイング解析部211は、領域の配列パターンに応じて第1のVゾーン対応表を参照することによりVゾーン項目の点数及び診断情報を取得する。
(4)タイミングの配列パターンが「tHWB−ttop−tHWD−tvmax」である場合、スイング解析部211は、領域の配列パターンに応じて第2のVゾーン対応表を参照することによりVゾーン項目の点数及び診断情報を取得する。
なお、以上の手順(1)乃至(4)によって取得された点数、診断情報、領域の配列パターン、タイミングの配列パターンは、各種の指標と共にスイング解析データに盛り込まれる。
また、以上の説明において、スイング解析部211は、Vゾーン項目のレベルを示す情報として「点数」を用いたが、点数以外の情報「ランク1,ランク2,ランク3,・・・」、「Aランク,Bランク,Cランク,・・・」、「○,×,△,・・・」、「ハイレベル、ミドルレベル、ローレベル、・・・」・・などの情報を用いてもよい(但し、以下では、Vゾーン項目のレベルとして「点数」を用いると仮定する。)。
1−6−3.Vゾーン項目の表示画面
本実施形態においては、ユーザー2が、図7に示す選択画面において、例えば何れか1つのチェックボックスをオンすることにより、1つのスイングに関するスイング解析データを選択してから選択画面の下部にあるOKボタンを押下(指先でタップ)し、更にVゾーン項目の表示開始操作を行うと、表示部25にVゾーン項目の表示画面が表示される。
本実施形態においては、ユーザー2が、図7に示す選択画面において、例えば何れか1つのチェックボックスをオンすることにより、1つのスイングに関するスイング解析データを選択してから選択画面の下部にあるOKボタンを押下(指先でタップ)し、更にVゾーン項目の表示開始操作を行うと、表示部25にVゾーン項目の表示画面が表示される。
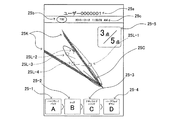
図26は、Vゾーン項目の表示画面の一例である。図26に示すとおり、Vゾーン項目の表示画面の上端部には、ユーザー2のIDを示すテキストイメージ25aと、使用したゴルフクラブ3(運動具の一例)の番手を示すテキストイメージ25bと、スイングの日時を示すテキストイメージ25cとが配置されている。
そして、Vゾーン項目の表示画面の例えば下端部には1番目の表示部25-1、2番目の表示部25-2、3番目の表示部25-3、4番目の表示部25-4が左右方向にかけて配列されている。1番目の表示部25-1、2番目の表示部25-2、3番目の表示部25-3、4番目の表示部25-4の全体は、ユーザー2が選択したスイングについての領域の配列パターンを表す。
なお、図26では、4つの表示部25-1、25-2、25-3、25-4の配置先を表示画面の下端部として4つの表示部25-1、25-2、25-3、25-4の配列方向を表示画面の左右方向としたが、配置先を表示画面の上端部又は中央部として配列方向を表示画面の左右方向としてもよいし、配置先を表示画面の右端部又は左端部又は中央部として配列方向を表示画面の上下方向としてもよい。
さて、1番目の表示部25−1には、時刻tHWB、ttop、tvmax、tHWDのうち1番目に到来した時刻(1番目の時刻)を表すテキストイメージ(図26では「ハーフウェイバック」)と、当該時刻にヘッド位置が属していた領域を表す符号イメージ(図26では「A」)とが付与されている(符号は、識別データの一例である。)。なお、1番目の表示部25−1には、1番目の時刻におけるヘッド位置をユーザー2へ通知するためのボタンの機能(HWBボタンの機能)が付与される(なお、HWBボタンの機能の説明は後述する)。
2番目の表示部25−2には、時刻tHWB、ttop、tvmax、tHWDのうち2番目に到来した時刻(2番目の時刻)を表すテキストイメージ(図26では「トップ」
)と、当該時刻にヘッド位置が属していた領域を表す符号イメージ(図26では「B」)とが付与されている。なお、2番目の表示部25−2には、2番目の時刻におけるヘッド位置をユーザー2へ通知するためのボタンの機能(トップボタンの機能)が付与される(なお、トップボタンの機能の説明は後述する)。
)と、当該時刻にヘッド位置が属していた領域を表す符号イメージ(図26では「B」)とが付与されている。なお、2番目の表示部25−2には、2番目の時刻におけるヘッド位置をユーザー2へ通知するためのボタンの機能(トップボタンの機能)が付与される(なお、トップボタンの機能の説明は後述する)。
3番目の表示部25−3には、時刻tHWB、ttop、tvmax、tHWDのうち3番目に到来した時刻(3番目の時刻)を表すテキストイメージ(図26では「ナチュラルアンコック」)と、当該時刻にヘッド位置が属していた領域を表す符号イメージ(図26では「C」)とが付与されている。なお、3番目の表示部25−3には、3番目の時刻におけるヘッド位置をユーザー2へ通知するためのボタンの機能(NUボタンの機能)が付与される(なお、NUボタンの機能の説明は後述する)。
4番目の表示部25−4には、時刻tHWB、ttop、tvmax、tHWDのうち4番目に到来した時刻(4番目の時刻)を表すテキストイメージ(図26では「ハーフウェイダウン」)と、当該時刻にヘッド位置が属していた領域を表す符号イメージ(図26では「D」)とが付与されている。なお、4番目の表示部25−4には、4番目の時刻におけるヘッド位置をユーザー2へ通知するためのボタンの機能(HWDボタンの機能)が付与される(なお、HWDボタンの機能の説明は後述する)。
従って、ユーザー2は、表示部25−1、25−2、25−3、25−4の全体に付与された符号の配列により、領域の配列パターン(すなわちスイング中にヘッドが通過した領域の遷移)を認識することができる。図26の例では、ユーザー2は、領域の配列パターンが「A−B−C−D」であることを認識することができる。
また、ユーザー2は、調子の良かったときのスイングについての領域の配列パターンと、調子の悪かったときのスイングについての領域の配列パターンとを比較し、両者の配列パターンの相違部分から、調子の悪い原因がスイング中の如何なる時刻にあるのか知ることもできる。例えば、調子の良かったときのスイングについての領域の配列パターンが「C−C−C−C」であり、調子の悪かったときのスイングについての領域の配列パターンが「C−C−B−C」である場合には、調子の悪い原因が4番目の時刻(グリップ減速開始時刻)におけるゴルフクラブ3の姿勢にあると推測することができる。
また、図26に示すとおり、Vゾーン項目の表示画面には、表示部25−1、25−2、25−3、25−4の他に、スイング軌跡(図26ではヘッドの軌跡)のイメージ25Cと、Vゾーンのイメージ25Kと、1番目の時刻におけるゴルフクラブのイメージ25L−1と、2番目の時刻におけるゴルフクラブのイメージ25L−2と、3番目の時刻におけるゴルフクラブのイメージ25L−3と、4番目の時刻におけるゴルフクラブのイメージ25L−4と、点数の表示部25−5とが配置されている。なお、各時刻におけるゴルフクラブのイメージは、各時刻におけるグリップの位置、各時刻におけるヘッドの位置、各時刻におけるセンサーユニット10の姿勢などに基づき作成される。また、図26では、バックスイングにおけるヘッドの軌跡を点線の曲線で示しており、ダウンスイングにおけるヘッドの軌跡を実線で示している(他の図も同様)。
このうち、点数の表示部25−5には、Vゾーン項目の点数表すテキストイメージ(図26では「3点/5点」)が付与されている。「3点/5点」の分母である「5点」は、最高点数(満点)を示している。なお、点数の表示部25−5には、Vゾーン項目の診断結果をユーザー2へ通知するためのボタンの機能(点数ボタンの機能)が付与される(なお、点数ボタンの機能の説明は後述する)。
以上のVゾーン項目の表示画面より、ユーザー2は、自分のスイングについての領域の
配列パターン(図26では「A−B−C−D」)を確認し、その後、1番目の時刻におけるゴルフクラブ3の姿勢を確認したいと感じた場合には、1番目の表示部25−1(ここではHWBボタン)を指先でタップすればよく、2番目の時刻におけるゴルフクラブ3の姿勢を確認したいと感じた場合には、2番目の表示部25−2(ここではトップボタン)を指先でタップすればよく、3番目の時刻におけるゴルフクラブ3の姿勢を確認したいと感じた場合には、3番目の表示部25−3(ここではNUボタン)を指先でタップすればよく、4番目の時刻におけるゴルフクラブ3の姿勢を確認したいと感じた場合には、4番目の表示部25−4(ここではHWDボタン)を指先でタップすればよい。また、ユーザー2は、Vゾーン項目の診断結果を確認したいと感じた場合には、点数の表示部25−5(点数ボタン)を指先でタップすればよい。
配列パターン(図26では「A−B−C−D」)を確認し、その後、1番目の時刻におけるゴルフクラブ3の姿勢を確認したいと感じた場合には、1番目の表示部25−1(ここではHWBボタン)を指先でタップすればよく、2番目の時刻におけるゴルフクラブ3の姿勢を確認したいと感じた場合には、2番目の表示部25−2(ここではトップボタン)を指先でタップすればよく、3番目の時刻におけるゴルフクラブ3の姿勢を確認したいと感じた場合には、3番目の表示部25−3(ここではNUボタン)を指先でタップすればよく、4番目の時刻におけるゴルフクラブ3の姿勢を確認したいと感じた場合には、4番目の表示部25−4(ここではHWDボタン)を指先でタップすればよい。また、ユーザー2は、Vゾーン項目の診断結果を確認したいと感じた場合には、点数の表示部25−5(点数ボタン)を指先でタップすればよい。
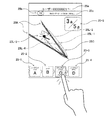
図27は、1番目の表示部25−1(ここではHWBボタン)がタップされたときの表示画面の一例である。図27に示すとおり1番目の表示部25−1(ここではHWBボタン)がタップされると、1番目の表示部25−1(ここではHWBボタン)が選択状態となり(図27では選択状態を実線枠及びハッチングで表している。)、1番目の時刻におけるゴルフクラブのイメージ25L−1が他の時刻におけるゴルフクラブのイメージ25L−2,25L−3,25L−4よりも強調して表示される。図27に示す例では、強調されたイメージ25L−1が相対的に高いコントラスト(太い実線)で表示され、強調されていないイメージ25L−2〜25L−4が相対的に低いコントラスト(細い点線)で表示されている。
図28は、2番目の表示部25−2(ここではトップボタン)がタップされたときの表示画面の一例である。図28に示すとおり2番目の表示部25−2(ここではトップボタン)がタップされると、2番目の表示部25−2(ここではトップボタン)が選択状態となり(図28では選択状態を実線枠及びハッチングで表している。)、2番目の時刻におけるゴルフクラブのイメージ25L−2が他の時刻におけるゴルフクラブのイメージ25L−1,25L−3,25L−4よりも強調して表示される。図28に示す例では、強調されたイメージ25L−2が相対的に高いコントラスト(太い実線)で表示され、強調されていないイメージ25L−1,25L−3,25L−4が相対的に低いコントラスト(細い点線)で表示されている。
図29は、3番目の表示部25−3(ここではNUボタン)がタップされたときの表示画面の一例である。図29に示すとおり3番目の表示部25−3(ここではNUボタン)がタップされると、3番目の表示部25−3(ここではNUボタン)が選択状態となり(図29では選択状態を実線枠及びハッチングで表している。)、3番目の時刻におけるゴルフクラブのイメージ25L−3が他の時刻におけるゴルフクラブのイメージ25L−1,25L−2,25L−4よりも強調して表示される。図29に示す例では、強調されたイメージ25L−3が相対的に高いコントラスト(太い実線)で表示され、強調されていないイメージ25L−1,25L−2,25L−4が相対的に低いコントラスト(細い点線)で表示されている。
図30は、4番目の表示部25−4(ここではHWBボタン)がタップされたときの表示画面の一例である。図30に示すとおり4番目の表示部25−4(ここではHWBボタン)がタップされると、4番目の表示部25−4(ここではHWBボタン)が選択状態となり(図30では選択状態を実線枠及びハッチングで表している。)、4番目の時刻におけるゴルフクラブのイメージ25L−4が他の時刻におけるゴルフクラブのイメージ25L−1,25L−2,25L−3よりも強調して表示される。図30に示す例では、強調されたイメージ25L−4が相対的に高いコントラスト(太い実線)で表示され、強調されていないイメージ25L−1,25L−2,25L−3が相対的に低いコントラスト(細い点線)で表示されている。
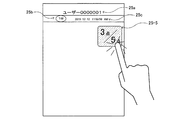
図31に示すとおり、点数の表示部25−5(点数ボタン)がタップされると、Vゾーン項目の表示画面が例えば図32に示すようなVゾーン項目の診断画面へと切り替わる。
図32に示すとおり、Vゾーン項目の診断画面には、Vゾーン項目の診断情報を表す各種のイメージが含まれている。但し、図32に示す診断情報はあくまでも一例であって、図26等に描かれた配列パターン(「A−B−C−D」)に対応しているとは限らない。
図32に示す診断画面は、スイングのタイプを示す情報(診断結果)と、当該タイプの弱点を改善(克服)するために有効な1又は複数のアドバイス(お勧めのレッスン)とを含んでいる。レッスン方法は、例えばテキスト及び静止画像の組み合わせで表現される。なお、図32では、レッスン方法(アドバイス)をテキスト及び静止画像の組み合わせで表現(報知、提供)した例を示したが、当該組み合わせの代わりに、アイコン、動画像、音声など、テキスト又は静止画像以外の表現態様を用いてもよいし、1又は3以上の表現態様の組み合わせを用いてもよい。
1−6−4.Vゾーン項目の表示処理のフロー
以下、Vゾーン項目の表示処理のフローを詳しく説明する。
以下、Vゾーン項目の表示処理のフローを詳しく説明する。
本実施形態においては、ユーザー2が、図7に示す選択画面において、例えば何れか1つのチェックボックスをオンすることにより、1つのスイングに関するスイング解析データを選択してから選択画面の下部にあるOKボタンを押下(指先でタップ)し、更にVゾーン項目の表示開始操作を行うと、Vゾーン項目の表示処理をスイング解析装置20に開始させることができる。
図33は、スイング解析装置20の処理部21(提示部の一例)によるVゾーン項目の表示処理(提示方法の一例)の手順の一例を示すフローチャート図である。
なお、図33のフローは、図25〜図30に示した表示画面に関する表示処理を示しており、診断画面(図32)に関する表示処理については省略している。また、以下の処理は、処理部21の主に表示処理部214(提示部の一例)が表示部25(提示部の一例)と協働して実行するものであるが、ここでは処理の主体が処理部21であるとして説明する。また、処理部21が表示処理を実行するためのプログラム(提示プログラムの一例)は、前述した記憶部24に記憶される。このプログラムは、あらかじめ不揮発性の記録媒体(コンピューターに読み取り可能な記録媒体)に記憶されたものであってもよいし、処理部21がネットワークを介して不図示のサーバーあるいはサーバー装置30から受信して記憶部24に記憶させたものであってもよい。
先ず、処理部21は、Vゾーン項目の表示開始操作があるか否かを判定し、表示開始操作があった場合(S91Y)には次の処理(S93)へ移行し、そうでない場合(S91N)は待機する。
次に、処理部21は、ユーザー2が選択したスイング解析データに含まれる、タイミングの配列パターンと、領域の配列パターンとを、認識する(S93)。ここでは、タイミングの配列パターンが「tHWB−ttop−tvmax−tHWD」であり、領域の配列パターンが「A−B−C−D」であったと仮定する。
次に、処理部21は、タイミングの配列パターン「tHWB−ttop−tvmax−tHWD」と、領域の配列パターン「A−B−C−D」とを反映させた表示画面の表示を開始する(S95)。ここでは、タイミングの配列パターンが「tHWB−ttop−t
vmax−tHWD」であるので、表示画面の1番目の表示部25−1にはHWBボタンの機能が付与され、2番目の表示部25−2にはトップボタンの機能が付与され、3番目の表示部25−3にはNUボタンの機能が付与され、4番目の表示部25−4にはHWDボタンの機能が付与される。また、表示画面には4つの時刻におけるゴルフクラブのイメージも配置される。
vmax−tHWD」であるので、表示画面の1番目の表示部25−1にはHWBボタンの機能が付与され、2番目の表示部25−2にはトップボタンの機能が付与され、3番目の表示部25−3にはNUボタンの機能が付与され、4番目の表示部25−4にはHWDボタンの機能が付与される。また、表示画面には4つの時刻におけるゴルフクラブのイメージも配置される。
次に、処理部21は、当該表示画面の表示中に、1番目の表示部25−1(ここではHWBボタン)がタップされたか否かの判定処理(S97)と、2番目の表示部25−2(ここではトップボタン)がタップされたか否かの判定処理(S101)と、3番目の表示部25−3(ここではNUボタン)がタップされたか否かの判定処理(S105)と、4番目の表示部25−4(ここではHWDボタン)がタップされたか否かの判定処理(S109)と、Vゾーン項目の表示終了操作が行われたか否かの判定処理(S113)とを実行し、Vゾーン項目の表示操作が行われない限り(S113N)、これらの判定処理(S97、S101、S105、S109、S113)を繰り返す。
その後、1番目の表示部25−1(ここではHWBボタン)がタップされると(S97Y)、処理部21は、1番目の時刻(ここではハーフウェイバック時刻)におけるゴルフクラブのイメージの強調表示を開始する(S99)。
また、2番目の表示部25−2(ここではトップボタン)がタップされると(S101Y)、処理部21は、2番目の時刻(ここではトップ時刻)におけるゴルフクラブのイメージの強調表示を開始する(S103)。
また、3番目の表示部25−3(ここではNUボタン)がタップされると(S105Y)、処理部21は、3番目の時刻(ここではグリップ減速開始時刻)におけるゴルフクラブのイメージの強調表示を開始する(S107)。
また、4番目の表示部25−4(ここではHWDボタン)がタップされると(S109Y)には、処理部21は、4番目の時刻(ここではハーフウェイダウン時刻)におけるゴルフクラブのイメージの強調表示を開始する。
そして、処理部21は、Vゾーン項目の表示終了操作があると(S113Y)、その時点でフローを終了する。
なお、図33のフローチャートにおいて、可能な範囲で各工程の順番を適宜変えてもよいし、一部の工程を削除あるいは変更してもよいし、他の工程を追加してもよい。
1−7.作用効果
以上に説明したように、本実施形態のスイング解析装置20は、予め識別符号A,B,C,D,Eが割り振られている複数の領域A,B,C,D,Eのうち、スイング中の時刻tHWB,ttop,tvmax,tHWDの各々においてゴルフクラブ3のヘッドの属していた領域を示す識別符号を、時系列にユーザー2へ提示する。
以上に説明したように、本実施形態のスイング解析装置20は、予め識別符号A,B,C,D,Eが割り振られている複数の領域A,B,C,D,Eのうち、スイング中の時刻tHWB,ttop,tvmax,tHWDの各々においてゴルフクラブ3のヘッドの属していた領域を示す識別符号を、時系列にユーザー2へ提示する。
本実施形態のスイング解析装置20によれば、複数の時刻tHWB,ttop,tvmax,tHWDの各々においてヘッドの属していた領域の識別符号が時系列で(すなわち複数の時刻tHWB,ttop,tvmax,tHWDの到来した順序で)提示されるので、ユーザー2は自分のスイングのタイプを識別符号の配列パターンとして認識することができる。具体的には、ユーザー2は、配列パターン「A−A−A−A」、「A−A−A−B」、「A−A−A−C」、・・・、「E−E−E−E」の何れかとして自分のスイングのタイプを客観的かつ簡潔に認識することができる。
従って、ユーザー2は、調子の良かったときのスイングについての配列パターンと、調子の悪かったときのスイングについての配列パターンとを比較し、両者の配列パターンの相違部分から、調子の悪い原因がスイング中の如何なる時刻にあるのか知ることができる。例えば、調子の良かったときのスイングについての配列パターンが「C−C−C−C」であり、調子の悪かったときのスイングについての配列パターンが「C−C−B−C」である場合には、調子の悪い原因が4番目の時刻におけるゴルフクラブ3の姿勢にあると推測することができる。
2.変形例
本発明は本実施形態に限定されず、本発明の要旨の範囲内で種々の変形実施が可能である。
本発明は本実施形態に限定されず、本発明の要旨の範囲内で種々の変形実施が可能である。
2−1.他の提示態様
なお、上記の実施形態における処理部21は、領域の配列パターンをユーザー2へ提示するために、個々の領域の識別符号(A,B,C,D,Eの別)を空間方向にかけて配列したが、個々の領域の識別符号(A,B,C,D,Eの別)を時間方向にかけて配列してもよい。つまり、上記の実施形態における処理部21は、配列パターン「A−B−C−D」をユーザー2へ提示するために、符号「A」を示すイメージ、符号「B」を示すイメージ、符号「C」を示すイメージ、符号「D」を示すイメージを順次に画面へ表示してもよいし、符号「A」を示す音声、符号「B」を示す音声、符号「C」を示す音声、符号「D」を示す音声を順次に出力してもよい。なお、音声の出力は、例えば、処理部21の音出力処理部215及び音出力部26が協働して行う。
なお、上記の実施形態における処理部21は、領域の配列パターンをユーザー2へ提示するために、個々の領域の識別符号(A,B,C,D,Eの別)を空間方向にかけて配列したが、個々の領域の識別符号(A,B,C,D,Eの別)を時間方向にかけて配列してもよい。つまり、上記の実施形態における処理部21は、配列パターン「A−B−C−D」をユーザー2へ提示するために、符号「A」を示すイメージ、符号「B」を示すイメージ、符号「C」を示すイメージ、符号「D」を示すイメージを順次に画面へ表示してもよいし、符号「A」を示す音声、符号「B」を示す音声、符号「C」を示す音声、符号「D」を示す音声を順次に出力してもよい。なお、音声の出力は、例えば、処理部21の音出力処理部215及び音出力部26が協働して行う。
また、上記の実施形態における処理部21は、領域の識別データとして「A」,「B」,「C」,「D」,「E」などの識別符号を用いたが、「1」,「2」,「3」,「4」,「5」などの識別番号を用いてもよいし、「Vゾーンの上側」,「Vゾーン内のホーガンプレーン側」,「Vゾーンの中央」,「Vゾーンのシャフトプレーン側」,「Vゾーンの下側」などの識別ワードを用いてもよいし、「標準範囲の上側」,「標準範囲内の上側」,「標準範囲内の下側」,「標準範囲の下側」などの識別ワードを用いてもよい。
2−2.他の通知態様
上記の実施形態における処理部21は、ユーザー2に対する1又は複数の通知を主に画面により行ったが、他の態様により行ってもよい。通知する態様としては、例えば、画像、光、音、振動、画像の変化パターン、光の変化パターン、音の変化パターン、振動の変化パターンのうち少なくとも1つを用いることができる。
上記の実施形態における処理部21は、ユーザー2に対する1又は複数の通知を主に画面により行ったが、他の態様により行ってもよい。通知する態様としては、例えば、画像、光、音、振動、画像の変化パターン、光の変化パターン、音の変化パターン、振動の変化パターンのうち少なくとも1つを用いることができる。
2−3.他の入力態様
上記の実施形態における処理部21は、ユーザー2からの1又は複数の情報入力を主に手指の接触(タッチパネルへのタップ操作、ボタン操作)によって行ったが、1又は複数の情報入力の態様としては、各種の態様を用いることができる。情報入力の態様としては、例えば、手指の接触による入力、音声による入力、ジェスチャーによる入力のうち少なくとも1つを用いることができる。
上記の実施形態における処理部21は、ユーザー2からの1又は複数の情報入力を主に手指の接触(タッチパネルへのタップ操作、ボタン操作)によって行ったが、1又は複数の情報入力の態様としては、各種の態様を用いることができる。情報入力の態様としては、例えば、手指の接触による入力、音声による入力、ジェスチャーによる入力のうち少なくとも1つを用いることができる。
2−4.Vゾーンの変形
上記の実施形態では、ヘッドの属する領域A,B,C,D,Eを定義するために、Vゾーン(シャフトプレーンとホーガンプレーンとで挟まれた領域)という概念を導入した。このVゾーンは、ゴルフクラブ3の長手方向に沿った第1仮想面とユーザー2の肩付近を通る第2仮想面とで挟まれた領域である(図34を参照)。第1仮想面は、例えば、打球の目標方向に沿った第1軸及びスイングの開始前におけるゴルフクラブ3の長手方向に沿
った第2軸で特定される、いわゆるシャフトプレーンである。第2平面は、例えば、第1軸を含み第1仮想面に対して所定の角度を成す、いわゆるホーガンプレーンである。但し、第2仮想面は、第1仮想面に対して並行な仮想面(第1仮想面に平行な仮想面、第1仮想面に沿った仮想面の双方を含む)であってもよい。因みに、平行な仮想面は「ショルダープレーン」と呼ばれることもある(図35を参照)。なお、上記の実施形態では、第1仮想面とユーザー2の身体情報との双方に基づき第2仮想面を算出してもよいし、第1仮想面と所定の関係を有する面を第2仮想面としてもよい。
上記の実施形態では、ヘッドの属する領域A,B,C,D,Eを定義するために、Vゾーン(シャフトプレーンとホーガンプレーンとで挟まれた領域)という概念を導入した。このVゾーンは、ゴルフクラブ3の長手方向に沿った第1仮想面とユーザー2の肩付近を通る第2仮想面とで挟まれた領域である(図34を参照)。第1仮想面は、例えば、打球の目標方向に沿った第1軸及びスイングの開始前におけるゴルフクラブ3の長手方向に沿
った第2軸で特定される、いわゆるシャフトプレーンである。第2平面は、例えば、第1軸を含み第1仮想面に対して所定の角度を成す、いわゆるホーガンプレーンである。但し、第2仮想面は、第1仮想面に対して並行な仮想面(第1仮想面に平行な仮想面、第1仮想面に沿った仮想面の双方を含む)であってもよい。因みに、平行な仮想面は「ショルダープレーン」と呼ばれることもある(図35を参照)。なお、上記の実施形態では、第1仮想面とユーザー2の身体情報との双方に基づき第2仮想面を算出してもよいし、第1仮想面と所定の関係を有する面を第2仮想面としてもよい。
また、第1仮想面と第2仮想面の定義の仕方は、これらに限定されることはなく、例えば図36に示すような仮想面を用いてもよい。図36に示す2つの仮想面は、スイング開始前におけるシャフトの姿勢に基づき設定された仮想面であって、第1の仮想面は、ユーザー2の肘付近を通る仮想面であり、第2の仮想面は、ユーザーの膝付近を通る仮想面である。また、第1の仮想面と第2の仮想面とは、非並行であり、例えば、ゴルフクラブのグリップエンド方向への延長直線上において互いに交差する。
2−5.スイング解析処理の変形
複数のセンサーユニット10が、ゴルフクラブ3やユーザー2の腕あるいは肩などの部位に装着され、スイング解析部211が、当該複数のセンサーユニット10の各々の計測データを用いて、スイング解析処理を行ってもよい。
複数のセンサーユニット10が、ゴルフクラブ3やユーザー2の腕あるいは肩などの部位に装着され、スイング解析部211が、当該複数のセンサーユニット10の各々の計測データを用いて、スイング解析処理を行ってもよい。
また、上記の実施形態では、スイング解析部211は、ユーザー2の身体情報を用いて第3軸である第3線分53及びホーガンプレーンHPを算出しているが、第2軸である第2線分52及びシャフトプレーンSPを、それぞれX軸周りに所定の第1角度β(例えば30°)だけ回転させたものを第3線分53及びホーガンプレーンHPとしてもよい。
また、上記の実施形態では、スイング解析部211は、センサーユニットが計測した3軸角速度の合成値として式(2)に示すような二乗和の平方根を用いてインパクトを検出しているが、3軸角速度の合成値として、これ以外にも、例えば、3軸角速度の二乗和、3軸角速度の和あるいはその平均値、3軸角速度の積等を用いてもよい。また、3軸角速度の合成値に代えて、3軸加速度の二乗和あるいはその平方根、3軸加速度の和あるいはその平均値、3軸加速度の積等の3軸加速度の合成値を用いてもよい。
2−6.HMD等の変形例
また、上述した実施形態では、1又は複数の画像の表示先として、例えば図37に示すようなリスト型の表示部(腕部装着型表示装置の一例)、或いは、図38に示すような頭部装着型の表示部(HMDという。頭部装着型表示装置の一例)を使用することもできる。
また、上述した実施形態では、1又は複数の画像の表示先として、例えば図37に示すようなリスト型の表示部(腕部装着型表示装置の一例)、或いは、図38に示すような頭部装着型の表示部(HMDという。頭部装着型表示装置の一例)を使用することもできる。
ヘッドマウントディスプレイは、ユーザー2の頭部に装着され、かつ、ユーザー2の一方の眼又は双方の眼に対して画像を表示するディスプレイである。ヘッドマウントディスプレイを頭部に装着したユーザー2は、ゴルフクラブ3のヘッド、ボール、又はターゲットの方向から視線を逸らさずに各種の画像を確認することができる。
図38に示すように、HMD500は、ユーザー2の頭部に装着される眼鏡本体501を有する。眼鏡本体501には、表示部502が設けられている。表示部502は、画像表示部503から射出した光束を、外界からユーザー2の眼に向かう光束に統合することで、ユーザー2から見た外界の実像に画像表示部503の虚像を重畳させる。
表示部502には、例えば、LCD(液晶ディスプレー)等の画像表示部503と、第1ビームスプリッター504と、第2ビームスプリッター505と、第1凹状反射ミラー
506と、第2凹状反射ミラー507と、シャッター508と、凸状レンズ509とが備えられる。
506と、第2凹状反射ミラー507と、シャッター508と、凸状レンズ509とが備えられる。
第1ビームスプリッター504は、ユーザー2の左眼の正面に配置され、画像表示部503から射出した光を、部分透過及び部分反射させる。
第2ビームスプリッター505は、ユーザー2の右眼の正面に配置され、第1ビームスプリッター504からの部分透過光を、部分透過及び部分反射させる。
第1凹状反射ミラー506は、第1ビームスプリッター504の正面に配置され、第1ビームスプリッター504の部分反射光を部分反射させて、第1ビームスプリッター504を透過させてユーザー2の左眼に導く。
第2凹状反射ミラー507は、第2ビームスプリッター505の正面に配置され、第2ビームスプリッター505の部分反射光を部分反射させて、第2ビームスプリッター505を透過させてユーザー2の右眼に導く。
凸状レンズ509は、シャッター508が開放された時に第2ビームスプリッター505の部分透過光をHMD500の外部に導く。
以上のHMD500によると、ユーザー2は、スイング解析装置20を手で持たずに必要な情報を確認することができる。
2−7.その他
上記の実施形態において、センサーユニット10の機能の一部又は全部は、スイング解析装置20又はサーバー装置30の側に搭載されてもよい。また、スイング解析装置20の機能の一部又は全部は、センサーユニット10又はサーバー装置30の側に搭載されてもよい。また、サーバー装置30の機能の一部又は全部は、スイング解析装置20又はセンサーユニット10の側に搭載されてもよい。
上記の実施形態において、センサーユニット10の機能の一部又は全部は、スイング解析装置20又はサーバー装置30の側に搭載されてもよい。また、スイング解析装置20の機能の一部又は全部は、センサーユニット10又はサーバー装置30の側に搭載されてもよい。また、サーバー装置30の機能の一部又は全部は、スイング解析装置20又はセンサーユニット10の側に搭載されてもよい。
上記の実施形態では、加速度センサー12と角速度センサー14が、センサーユニット10に内蔵されて一体化されているが、加速度センサー12と角速度センサー14は一体化されていなくてもよい。あるいは、加速度センサー12と角速度センサー14が、センサーユニット10に内蔵されずに、ゴルフクラブ3又はユーザー2に直接装着されてもよい。また、上記の実施形態では、センサーユニット10とスイング解析装置20とが別体であるが、これらを一体化してゴルフクラブ3又はユーザー2に装着可能にしてもよい。また、センサーユニット10が、慣性センサー(例えば、加速度センサー12あるいは角速度センサー14)とともに、スイング解析装置20の一部の構成要素を備えていてもよい。
なお、慣性センサーは、加速度や角速度等の慣性量を計測可能なセンサーであればよく、例えば、加速度や角速度を計測可能な慣性計測ユニット(IMU:Inertial Measurement Unit)でもよい。また、前記慣性センサーは、例えば、運動具又はユーザーの部位に取り付けられ、前記運動具やユーザーに対して脱着可能であってもよいし、前記運動具に内蔵されるなど、前記運動具に固定されていて取り外すことができないものでもよい。
また、上記の実施形態では、ゴルフスイングを解析するスイング解析システム(サーバー装置)を例に挙げたが、本発明は、テニスや野球などの様々な運動におけるスイン
グを解析するスイング解析システム(サーバー装置)に適用することができる。
また、上記の実施形態では、ゴルフスイングを解析するスイング解析システム(サーバー装置)を例に挙げたが、本発明は、テニスや野球などの様々な運動におけるスイン
グを解析するスイング解析システム(サーバー装置)に適用することができる。
上述した実施形態および変形例は一例であって、これらに限定されるわけではない。例
えば、各実施形態および各変形例を適宜組み合わせることも可能である。
えば、各実施形態および各変形例を適宜組み合わせることも可能である。
本発明は、実施の形態で説明した構成と実質的に同一の構成(例えば、機能、方法及び結果が同一の構成、あるいは目的及び効果が同一の構成)を含む。また、本発明は、実施の形態で説明した構成の本質的でない部分を置き換えた構成を含む。また、本発明は、実施の形態で説明した構成と同一の作用効果を奏する構成又は同一の目的を達成することができる構成を含む。また、本発明は、実施の形態で説明した構成に公知技術を付加した構成を含む。
1…スイング解析システム、2…ユーザー、3…ゴルフクラブ、4…ゴルフボール、10…センサーユニット、12…加速度センサー、14…角速度センサー、16…信号処理部、18…通信部、20…スイング解析装置、21…処理部、22…通信部、23…操作部、24…記憶部、25…表示部、26…音出力部、27…通信部、30…サーバー装置、31…処理部、32…通信部、34…記憶部、40…ネットワーク、51…第1線分、52…第2線分、53…第3線分、61…ゴルフクラブのヘッドの位置、62…ゴルフクラブのグリップエンドの位置、63…ユーザーの両肩を結ぶ線分上の所定位置、70…ターゲットライン(打球の目標方向)、71…ターゲットラインに直交する平面、72…打球点での接線、73…フェース面と直交する直線、74…フェース面、75…打球点、76…ゴルフクラブのヘッドの軌跡を表す曲線、101…処理部、110…記憶部、210…データ取得部、211…スイング解析部、212…画像データ生成部、213…記憶処理部、214…表示処理部、215…音出力処理部、240…スイング解析プログラム、242…ゴルフクラブ情報、244…身体情報、246…センサー装着位置情報、248…スイング解析データ、310…データ取得部、312…記憶処理部、341…スイング解析データリスト、SAB…領域Aと領域Bとの境界面、SBC…領域Bと領域Cとの境界面、SCD…領域Cと領域Dとの境界面、SDE…領域Dと領域Eとの境界面、SP…シャフトプレーン、HP…ホーガンプレーン、H1,H2…ホーガンプレーンの頂点、H3…H1とH2の中点、S1,S2…シャフトプレーンの頂点、S3…S1とS2の中点、U1,U2…シャフトプレーンとホーガンプレーンの共通の頂点
Claims (29)
- 慣性センサーの出力を用いて、
予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示する提示部を含む、
電子機器。 - 請求項1において、
前記提示部は、
前記識別データを時系列に前記ユーザーへ提示する、
電子機器。 - 請求項1又は2において、
前記複数の領域は、
前記運動具の基本姿勢を示す第1仮想面に基づいて設定される、
電子機器。 - 請求項1乃至3の何れか一項において、
前記第1仮想面は、
打球の目標方向に沿った第1軸と、バックスイングの開始前における前記運動具の長手方向に沿った第2軸と、に基づいて特定される面である、
電子機器。 - 請求項4において、
前記複数の領域は、
前記第1仮想面と、
前記ユーザーの肩付近を通る第2仮想面と、
に基づいて設定される、
電子機器。 - 請求項5において、
前記第2仮想面は、
前記第1軸を含み前記第1仮想面と所定角度をなす面である、
電子機器。 - 請求項5において、
前記第2仮想面は、
前記第1仮想面と並行な平面である、
電子機器。 - 請求項5乃至7の何れか1項において、
前記提示部は、
前記識別データと共に前記第1仮想面及び前記第2仮想面を前記ユーザーへ提示する、
電子機器。 - 請求項1乃至8の何れか一項において、
前記提示部は、
前記識別データと共に前記スイングの軌跡を前記ユーザーへ提示する、
電子機器。 - 請求項1乃至9の何れか一項において、
前記複数のタイミングには、
バックスイング中に前記運動具の長手方向が水平面に沿うタイミング、
トップのタイミング、
ダウンスイング中に前記運動具の把持部が減速し始めるタイミング、
及びダウンスイング中に前記運動具の長手方向が水平面に沿うタイミング、
のうち少なくとも2つが含まれる、
電子機器。 - 請求項1乃至10の何れか一項において、
前記慣性センサーには、
加速度センサー及び角速度センサーの少なくとも一方が含まれる、
電子機器。 - 請求項1乃至11の何れか一項において、
前記提示部は、
前記提示された前記識別データ基づいて、レベルを提示する、
電子機器。 - 請求項1乃至12の何れか一項において、
前記提示部は、
前記提示された前記識別データ基づいて、診断情報を提示する、
電子機器。 - 請求項13において、
前記提示部は、
前記診断情報基づいて、スイングの練習方法に関する情報を提示する、
電子機器。 - 請求項1乃至14の何れか一項に記載の電子機器と、
前記慣性センサーと、
を含む、システム。 - 請求項1乃至14の何れか一項に記載の電子機器と、
前記識別データを表示する頭部装着型表示装置と、
を含む、システム。 - 請求項1乃至14の何れか一項に記載の電子機器と、
前記識別データを表示する腕部装着型表示装置と、
を含む、システム。 - 慣性センサーの出力を用いて、
予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示するステップを含む、
提示方法。 - 請求項18において、
前記提示するステップでは、
前記識別データを時系列に前記ユーザーへ提示する、
提示方法。 - 請求項18又は19において、
前記複数の領域は、
前記運動具の基本姿勢を示す第1仮想面に基づいて設定される、
提示方法。 - 請求項20において、
前記第1仮想面は、
打球の目標方向に沿った第1軸と、バックスイングの開始前における前記運動具の長手方向に沿った第2軸と、に基づいて特定される面である、
提示方法。 - 請求項21において、
前記複数の領域は、
前記第1仮想面と、
前記ユーザーの肩付近を通る第2仮想面と、
に基づいて設定される、
提示方法。 - 請求項22において、
前記第2仮想面は、
前記第1軸を含み前記第1仮想面と所定角度をなす面である、
提示方法。 - 請求項22において、
前記第2仮想面は、
前記第1仮想面と並行な平面である、
提示方法。 - 請求項22乃至24の何れか1項において、
前記提示するステップは、
前記識別データと共に前記第1仮想面及び前記第2仮想面を前記ユーザーへ提示する、
提示方法。 - 請求項18乃至25の何れか一項において、
前記提示するステップは、
前記識別データと共に前記スイングの軌跡を前記ユーザーへ提示する、
提示方法。 - 請求項18乃至26の何れか一項において、
前記複数のタイミングには、
バックスイング中に前記運動具の長手方向が水平面に沿うタイミング、
トップのタイミング、
ダウンスイング中に前記運動具の把持部が減速し始めるタイミング、
及びダウンスイング中に前記運動具の長手方向が水平面に沿うタイミング、
のうち少なくとも2つが含まれる、
提示方法。 - 慣性センサーの出力を用いて、
予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示するステップをコンピューターに実行させる、
提示プログラム。 - 慣性センサーの出力を用いて、
予め識別データが割り振られている複数の領域のうち、スイング中の複数のタイミングの各々において運動具の打撃部の属していた領域を示す前記識別データを、ユーザーへ提示するステップをコンピューターに実行させる提示プログラムを記録した、
記録媒体。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016005804A JP2017124071A (ja) | 2016-01-15 | 2016-01-15 | 電子機器、システム、提示方法、提示プログラム、及び記録媒体 |
| US15/387,093 US10300332B2 (en) | 2016-01-15 | 2016-12-21 | Electronic apparatus, system, presentation method, presentation program, and recording medium |
| CN201710014963.0A CN107007993A (zh) | 2016-01-15 | 2017-01-09 | 电子设备、系统、提示方法以及记录介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016005804A JP2017124071A (ja) | 2016-01-15 | 2016-01-15 | 電子機器、システム、提示方法、提示プログラム、及び記録媒体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017124071A true JP2017124071A (ja) | 2017-07-20 |
Family
ID=59313499
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016005804A Pending JP2017124071A (ja) | 2016-01-15 | 2016-01-15 | 電子機器、システム、提示方法、提示プログラム、及び記録媒体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10300332B2 (ja) |
| JP (1) | JP2017124071A (ja) |
| CN (1) | CN107007993A (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017124099A (ja) * | 2016-01-15 | 2017-07-20 | セイコーエプソン株式会社 | 運動解析方法、運動解析プログラム及びその記憶媒体並びに運動解析装置及び運動解析システム |
| JP2017124071A (ja) * | 2016-01-15 | 2017-07-20 | セイコーエプソン株式会社 | 電子機器、システム、提示方法、提示プログラム、及び記録媒体 |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9474968B2 (en) * | 2002-07-27 | 2016-10-25 | Sony Interactive Entertainment America Llc | Method and system for applying gearing effects to visual tracking |
| JP2004164563A (ja) * | 2002-09-26 | 2004-06-10 | Toshiba Corp | 画像解析方法、画像解析装置、画像解析プログラム |
| US7771263B2 (en) * | 2004-09-09 | 2010-08-10 | Telford Golf Enterprises, LLC | Portable swing speed analyzer |
| US8926445B2 (en) * | 2011-09-03 | 2015-01-06 | Golf Impact, Llc | Golf free swing measurement and analysis system |
| WO2011096203A1 (ja) * | 2010-02-03 | 2011-08-11 | 任天堂株式会社 | ゲームシステム、操作装置、およびゲーム処理方法 |
| JP5948011B2 (ja) * | 2010-11-19 | 2016-07-06 | セイコーエプソン株式会社 | 運動解析装置 |
| JP5940436B2 (ja) | 2012-11-20 | 2016-06-29 | 株式会社Access | モーションセンサを用いたスイング解析システム、スイング解析方法、およびスイング解析プログラム |
| US8998717B2 (en) * | 2013-01-17 | 2015-04-07 | Ppg Technologies, Inc. | Device and method for reconstructing and analyzing motion of a rigid body |
| JP6168279B2 (ja) * | 2013-02-15 | 2017-07-26 | セイコーエプソン株式会社 | 解析制御装置、運動解析システム、プログラム、記録媒体および方位合わせ方法 |
| JP5870969B2 (ja) | 2013-06-21 | 2016-03-01 | セイコーエプソン株式会社 | 運動解析装置および運動解析プログラム |
| KR20140148308A (ko) * | 2013-06-21 | 2014-12-31 | 세이코 엡슨 가부시키가이샤 | 운동 해석 장치 |
| US20150072797A1 (en) * | 2013-09-09 | 2015-03-12 | Access Co., Ltd. | Terminal Device and Display Method |
| JP6295605B2 (ja) * | 2013-10-30 | 2018-03-20 | セイコーエプソン株式会社 | 運動解析装置 |
| JP2015156882A (ja) * | 2014-02-21 | 2015-09-03 | セイコーエプソン株式会社 | 運動解析装置及び運動解析システム |
| JP2015181780A (ja) * | 2014-03-25 | 2015-10-22 | セイコーエプソン株式会社 | 運動解析方法、運動解析装置、運動解析システム及びプログラム |
| US20150285834A1 (en) * | 2014-04-08 | 2015-10-08 | Seiko Epson Corporation | Sensor, computing device, and motion analyzing apparatus |
| US10252106B2 (en) * | 2014-06-19 | 2019-04-09 | Sumitomo Rubber Industries, Ltd. | Golf swing analysis apparatus and golf club fitting apparatus |
| US9173596B1 (en) * | 2014-06-28 | 2015-11-03 | Bertec Limited | Movement assessment apparatus and a method for providing biofeedback using the same |
| JP2016013302A (ja) * | 2014-07-02 | 2016-01-28 | セイコーエプソン株式会社 | 運動解析方法、プログラム及び運動解析装置 |
| JP2016036681A (ja) * | 2014-08-11 | 2016-03-22 | セイコーエプソン株式会社 | 運動解析方法、運動解析装置、運動解析システム及びプログラム |
| JP6696109B2 (ja) * | 2014-12-22 | 2020-05-20 | セイコーエプソン株式会社 | 運動解析装置、運動解析システム、運動解析方法及びプログラム |
| JP2017023638A (ja) * | 2015-07-28 | 2017-02-02 | セイコーエプソン株式会社 | スイング診断装置、スイング診断システム、スイング診断方法、スイング診断プログラム及び記録媒体 |
| JP2017023644A (ja) * | 2015-07-28 | 2017-02-02 | セイコーエプソン株式会社 | 演算装置、演算システム、演算方法、演算プログラム、及び記録媒体 |
| JP2017023639A (ja) * | 2015-07-28 | 2017-02-02 | セイコーエプソン株式会社 | スイング診断装置、スイング診断システム、スイング診断方法、スイング診断プログラム及び記録媒体 |
| JP6613684B2 (ja) * | 2015-07-28 | 2019-12-04 | セイコーエプソン株式会社 | スイング診断方法、スイング診断プログラム、記録媒体、スイング診断装置及びスイング診断システム |
| JP6613685B2 (ja) * | 2015-07-28 | 2019-12-04 | セイコーエプソン株式会社 | スイング診断方法、スイング診断プログラム、記録媒体、スイング診断装置及びスイング診断システム |
| JP2017124072A (ja) * | 2016-01-15 | 2017-07-20 | セイコーエプソン株式会社 | 電子機器、システム、提示方法、提示プログラム、及び記録媒体 |
| JP2017124099A (ja) * | 2016-01-15 | 2017-07-20 | セイコーエプソン株式会社 | 運動解析方法、運動解析プログラム及びその記憶媒体並びに運動解析装置及び運動解析システム |
| JP2017124079A (ja) * | 2016-01-15 | 2017-07-20 | セイコーエプソン株式会社 | 表示方法、スイング解析装置、スイング解析システム、スイング解析プログラム、および記録媒体 |
| JP2017124071A (ja) * | 2016-01-15 | 2017-07-20 | セイコーエプソン株式会社 | 電子機器、システム、提示方法、提示プログラム、及び記録媒体 |
| JP2017189491A (ja) * | 2016-04-15 | 2017-10-19 | セイコーエプソン株式会社 | 表示方法、スイング解析装置、スイング解析システム、スイング解析プログラム、および記録媒体 |
| JP6828265B2 (ja) * | 2016-04-15 | 2021-02-10 | セイコーエプソン株式会社 | 表示方法、スイング解析装置、スイング解析システム、スイング解析プログラム、および記録媒体 |
-
2016
- 2016-01-15 JP JP2016005804A patent/JP2017124071A/ja active Pending
- 2016-12-21 US US15/387,093 patent/US10300332B2/en active Active
-
2017
- 2017-01-09 CN CN201710014963.0A patent/CN107007993A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN107007993A (zh) | 2017-08-04 |
| US20170203151A1 (en) | 2017-07-20 |
| US10300332B2 (en) | 2019-05-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6613684B2 (ja) | スイング診断方法、スイング診断プログラム、記録媒体、スイング診断装置及びスイング診断システム | |
| JP2017124079A (ja) | 表示方法、スイング解析装置、スイング解析システム、スイング解析プログラム、および記録媒体 | |
| JP6828265B2 (ja) | 表示方法、スイング解析装置、スイング解析システム、スイング解析プログラム、および記録媒体 | |
| JP6613685B2 (ja) | スイング診断方法、スイング診断プログラム、記録媒体、スイング診断装置及びスイング診断システム | |
| JP2016013302A (ja) | 運動解析方法、プログラム及び運動解析装置 | |
| JP2017124074A (ja) | 電子機器、システム、判定方法、判定プログラム、及び記録媒体 | |
| US20170120124A1 (en) | Swing analysis apparatus, swing analysis system, swing analysis method, swing analysis program, recording medium, and swing display apparatus | |
| JP2016116719A (ja) | 運動解析装置、運動解析システム、運動解析方法及びプログラム | |
| JP2017023639A (ja) | スイング診断装置、スイング診断システム、スイング診断方法、スイング診断プログラム及び記録媒体 | |
| JP2017023643A (ja) | 演算装置、演算システム、演算方法、演算プログラム、及び記録媒体 | |
| JP2017023638A (ja) | スイング診断装置、スイング診断システム、スイング診断方法、スイング診断プログラム及び記録媒体 | |
| JP2016116566A (ja) | 運動解析装置、運動解析方法、プログラム、及び運動解析システム | |
| JP2016067410A (ja) | 運動解析装置、運動解析システム、運動解析方法及びプログラム | |
| JP2017086164A (ja) | 電子機器、システム、方法、プログラム、及び記録媒体 | |
| JP2017144130A (ja) | 運動解析装置、運動解析システム、運動解析方法、運動解析プログラム、記録媒体および表示方法 | |
| JP2017189490A (ja) | 表示方法、スイング解析装置、スイング解析システム、スイング解析プログラム、および記録媒体 | |
| JP2016116615A (ja) | 運動解析装置、運動解析システム、運動解析方法、及びプログラム | |
| US20170203211A1 (en) | Motion analysis method, motion analysis program, storage medium thereof, motion analysis apparatus, and motion analysis system | |
| US20170028253A1 (en) | Calculation apparatus, calculation system, calculation method, and recording medium | |
| US20170203188A1 (en) | Display method, motion analysis apparatus, motion analysis system, motion analysis program, and recording medium | |
| JP2017023636A (ja) | スイング診断装置、スイング診断システム、スイング診断方法、スイング診断プログラム及び記録媒体 | |
| JP2015181565A (ja) | 運動解析装置、運動解析システム、運動解析方法、運動解析情報の表示方法及びプログラム | |
| JP2017124078A (ja) | 表示方法、表示装置、運動解析システム、運動解析プログラム、および記録媒体 | |
| JP2016116613A (ja) | 運動解析装置、運動解析システム、運動解析方法、及びプログラム | |
| JP2016116720A (ja) | 運動解析装置、運動解析システム、運動解析方法及びプログラム |