JP2016138870A - 半導体装置 - Google Patents
半導体装置 Download PDFInfo
- Publication number
- JP2016138870A JP2016138870A JP2015015618A JP2015015618A JP2016138870A JP 2016138870 A JP2016138870 A JP 2016138870A JP 2015015618 A JP2015015618 A JP 2015015618A JP 2015015618 A JP2015015618 A JP 2015015618A JP 2016138870 A JP2016138870 A JP 2016138870A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- angle
- input
- circuit
- switch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M1/00—Analogue/digital conversion; Digital/analogue conversion
- H03M1/12—Analogue/digital converters
- H03M1/48—Servo-type converters
- H03M1/485—Servo-type converters for position encoding, e.g. using resolvers or synchros
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/30—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring angles or tapers; for testing the alignment of axes
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M1/00—Analogue/digital conversion; Digital/analogue conversion
- H03M1/06—Continuously compensating for, or preventing, undesired influence of physical parameters
- H03M1/08—Continuously compensating for, or preventing, undesired influence of physical parameters of noise
- H03M1/0863—Continuously compensating for, or preventing, undesired influence of physical parameters of noise of switching transients, e.g. glitches
- H03M1/0872—Continuously compensating for, or preventing, undesired influence of physical parameters of noise of switching transients, e.g. glitches by disabling changes in the output during the transitions, e.g. by holding or latching
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M1/00—Analogue/digital conversion; Digital/analogue conversion
- H03M1/12—Analogue/digital converters
- H03M1/64—Analogue/digital converters with intermediate conversion to phase of sinusoidal or similar periodical signals
- H03M1/645—Analogue/digital converters with intermediate conversion to phase of sinusoidal or similar periodical signals for position encoding, e.g. using resolvers or synchros
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
【解決手段】半導体装置において、第1の入力部T1には正弦波信号SN1が入力され、第2の入力部T2には余弦波信号CS1が入力される。マルチプレクサMUXは、正弦波信号SN1および余弦波信号CS1の一方を交互に選択する。アナログ/デジタル変換器11は、マルチプレクサMUXの出力信号をデジタル値に変換する。スイッチ回路SWaは、第1および第2の入力部T1,T2の少なくとも一方とマルチプレクサMUXとの間に接続される。スイッチ回路SWSaは、入力された正弦波信号SN1または余弦波信号CS1を反転可能に構成されている。
【選択図】図1
Description
[R/Dコンバータの構成]
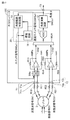
図1は、第1の実施形態による半導体装置として、R/Dコンバータ10の構成を示すブロック図である。なお、第1の実施形態では、半導体装置としてR/Dコンバータを例に挙げて説明するが、第6の実施形態で説明するように、R/Dコンバータを内蔵した集積回路(たとえば、マイクロコントローラユニット)によって半導体装置を構成することもできる。
レゾルバ3は、図示しない1個のロータ巻線と2個のステータ巻線とを備える。2個のステータ巻線は、軸倍角が1の場合、たとえば機械的に90°の角度をずらして配置されている。ロータ巻線に励磁信号EXを入力したとき、2個のステータ巻線からは電気角の正弦(サイン:sine)で励磁信号EXが変調された正弦波信号SN1および電気角の余弦(コサイン:cosine)で励磁信号EXが変調された余弦波信号CS1がそれぞれ出力される。ロータの機械角をΘとし、電気角をθとし、軸倍角をNとすると、θ=N×Θの関係がある。
増幅器AMPa,AMPbは、たとえば演算増幅器である。増幅器AMPaの非反転入力端子(+端子)は、スイッチ回路SWaを介して入力部T1の正側入力端子T1pと接続され、増幅器AMPaの反転入力端子(−端子)は、スイッチ回路SWaを介して入力部T1の負側入力端子T1nと接続される。増幅器AMPaの反転入力端子(−端子)は、さらに抵抗素子R13を介して増幅器AMPaの出力端子と接続される。増幅器AMPaの非反転入力端子(+端子)は、抵抗素子R14を介して共通電位comを与えるノードと接続される。
スイッチ回路SWaは、第1の実施形態の場合、入力部T1と増幅器AMPaとの間に設けられる。スイッチ回路SWaは、スイッチ信号SWSaが活性状態のとき、差動信号である正弦波信号SN1の+側と−側とを入れ替えて、すなわち、正弦波信号SN1の値を反転させて増幅器AMPaに入力する。一方、スイッチ回路SWaは、スイッチ信号SWSaが非活性状態のとき、正弦波信号SN1を反転せずに増幅器AMPaに入力する。以下、前者の場合、スイッチ回路SWaは反転状態であると称し、後者の場合、スイッチ回路SWaは非反転状態と称する。
再び図1を参照して、マルチプレクサMUXは、増幅器AMPa,AMPbからそれぞれ出力された正弦波信号SN2および余弦波信号CS2を交互に選択してA/Dコンバータ11に出力する。マルチプレクサMUXがこれらの信号を交互に選択する切り替え時間(増幅器AMPaを1回選択する期間および増幅器AMPbを1回選択する期間の各々)は、A/Dコンバータ11がサンプリングしたアナログ値を一つの角度φの値に変換するのに要する時間に設定され、例えば励磁信号EXの周期(2π/ω)の100分の1程度である。なお、マルチプレクサMUXと増幅器AMPa,AMPbとの間にそれぞれサンプルホールド回路9a,9b(S/H:Sample & Hold)を設けてもよい。
角度演算回路12は、A/Dコンバータ11によってデジタル値に変換された正弦波信号SN2および余弦波信号CS2に基づいて、ロータの電気角θに対応する角度φを算出する(誤差が0の場合、φ=θである)。
ε1=sinθ・cosφ・sinωt−cosθ・sinφ・sinωt
=sin(θ−φ)・sinωt …(1)
で与えられる。
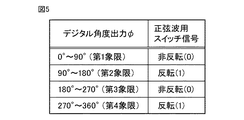
再び図1を参照して、角度範囲判定回路13は、算出された角度φに基づいてスイッチ信号SWSaを生成する論理回路である。生成されたスイッチ信号SWSaに応答して、スイッチ回路SWaは、A/Dコンバータ11に入力される正弦波信号SN2と余弦波信号CS2とが同相となるよう切り替えられる。なお、角度範囲判定回路13はスイッチ回路SWaの切り替えのタイミングを制御するスイッチ制御回路20を構成する。以下、図1、図5を参照して具体的に説明する。
以下、上記のR/Dコンバータ10の動作の特徴について説明する。上述したように、図1のR/Dコンバータ10は、入力された正弦波信号SN1と余弦波信号CS1とに基づいて角度φを算出する。R/Dコンバータ10に設けられた角度範囲判定回路13は、算出された角度φの範囲に応じて、スイッチ信号SWSaを活性/非活性に切り替える。スイッチ信号SWSaが活性状態のとき、スイッチ回路SWaが反転状態になることによって、正弦波信号SN1が反転される(+側信号と−側信号とが入れ替えられる)。具体的には、角度φが第2象限(90°〜180°)または第4象限(270°〜360°)であるとき、スイッチ回路SWaは反転状態になるように制御される。以下、具体例を挙げて説明する。
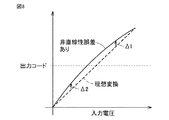
以上のとおり、第1の実施形態のR/Dコンバータ10によれば、算出された角度φの範囲が第2象限(90°〜180°)と第4象限(270°〜360°)の場合に、正弦波信号を反転させるスイッチ回路SWaが設けられる。これによって、A/Dコンバータ11に入力される正弦波信号と余弦波信号とが常に同相となって互いに近い値になるので、A/Dコンバータ11の非直線性誤差の影響を受けにくくすることができる。
正弦波信号SN1に代えて余弦波信号CS1を反転可能なように、入力部T1と増幅器AMPaとの間に代えて入力部T2と増幅器AMPbとの間に、スイッチ回路SWbを設けてもよい。この場合、スイッチ回路SWbは、角度φの範囲が第2象限(90°〜180°)と第4象限(270°〜360°)の場合に余弦波信号CS1を反転させる。
[構成]
図9は、第2の実施形態によるR/Dコンバータ10Aの構成を示すブロック図である。
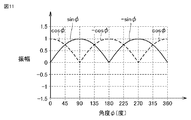
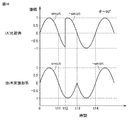
図11は、図9のR/Dコンバータ10Aにおいて、A/Dコンバータ11に入力される正弦波信号SN2および余弦波信号CS2の振幅と角度φとの関係を示すグラフである。図11では、励磁信号EX(sinωt)が1になる時刻(ω・t=π/2、5π/2、…)における振幅を示している。
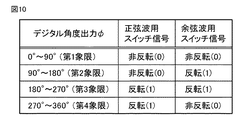
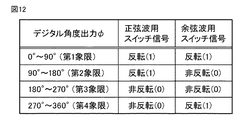
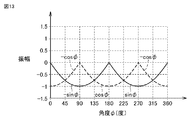
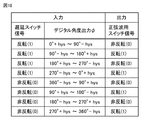
図12は、図9の角度範囲判定回路13A,13Bの変形例において、入力値と出力値との関係を表形式で示す図である。図12に示す角度範囲判定回路13A,13Bの変形例では、A/Dコンバータ11に入力される正弦波信号SN2および余弦波信号CS2が両方とも共通電位comよりも小さくなるように、正弦波信号SN2または余弦波信号CS2が角度φに応じて反転される。
[構成および動作]
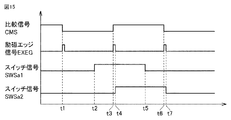
図14は、第3の実施形態によるR/Dコンバータ10Bの構成を示すブロック図である。図14のR/Dコンバータ10Bは、比較器CMP、エッジ検出回路14、およびラッチ回路15をさらに含む点で、図1のR/Dコンバータと異なる。
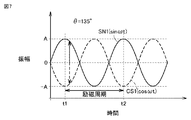
図16は、図14の増幅器AMPaの出力後の正弦波信号SN2の波形の一例を示す図である。図16において、励磁信号EXをsinωtとし、電気角θがほぼ90°であるとする。この場合、R/Dコンバータ10Bに入力される正弦波信号SN1はsinωtに略等しくなり、余弦波信号CS1は略0になる。また、図16において、時刻t12以前は、電気角θは90°より若干小さな値であり、時刻t12以降は、電気角θは90°より若干大きな値であるとする。
[構成および動作]
図17は、第4の実施形態によるR/Dコンバータ10Cの構成を示すブロック図である。図17のR/Dコンバータ10Cは遅延回路16をさらに含む点で図1の第1の実施形態のR/Dコンバータ10と異なる。遅延回路16は、フリップフロップ等を含み、遅延スイッチ信号DSWSa1を生成して出力する。遅延スイッチ信号DSWSa1は、角度範囲判定回路13から出力されたスイッチ信号SWSaを少なくともクロックの1サイクル分だけ遅らせた信号である。
図19は、図17の増幅器AMPaの出力後の正弦波信号SN2の波形の一例を示す図である。図19において、励磁信号EXをsinωtとし、電気角θがほぼ90°であるとする。この場合、R/Dコンバータ10Bに入力される正弦波信号SN1はsinωtに略等しくなり、余弦波信号CS1は略0になる。
前述した第1〜第4の実施形態は相互に組み合わせることが可能である。第5の実施形態は第2〜第4の実施形態を組み合わせたものである。
図20は、第5の実施形態によるR/Dコンバータ10Dの構成を示すブロック図である。図20のR/Dコンバータ10Dは、遅延回路16A,16Bと、比較器CMPと、エッジ検出回路14と、ラッチ回路15とをさらに含む点で、図9で説明した第2の実施形態のR/Dコンバータ10Aと異なる。
上記の第5の実施形態のR/Dコンバータ10Dによれば、第1〜第4の実施形態で説明した効果とほぼ同じ効果を奏する。
図22は、モータ制御装置の構成を示すブロック図である。図22の同期モータ1が、産業機械用または自動車の動力系のモータ用など、厳しい環境下で使用される場合には、同期モータ1の回転軸2の角度を検出するためのセンサとしてレゾルバ3がよく用いられる。モータ制御装置は、レゾルバ3の検出値に基づいて同期モータ1の回転駆動を制御する。
Claims (12)
- 検出する角度の正弦を表す第1の信号が入力される第1の入力部と、
前記角度の余弦を表す第2の信号が入力される第2の入力部と、
前記第1および第2の信号の一方を選択するマルチプレクサと、
前記マルチプレクサの出力信号をデジタル値に変換するアナログ/デジタル変換器と、
前記第1および第2の入力部の少なくとも一方と前記マルチプレクサとの間に接続されたスイッチ回路とを備え、
前記スイッチ回路は、入力された前記第1または第2の信号を反転可能に構成される、半導体装置。 - 前記アナログ/デジタル変換器によってデジタル値に変換された前記第1および第2の信号に基づいて前記角度を算出する角度演算回路と、
前記角度演算回路によって算出された角度に基づいて、前記スイッチ回路の切り替えを制御するスイッチ制御回路とをさらに備える、請求項1に記載の半導体装置。 - 前記第1の信号は、レゾルバに入力される励磁信号を前記角度の正弦で変調した信号であり、
前記第2の信号は、前記励磁信号を前記角度の余弦で変調した信号であり、
前記スイッチ制御回路は、前記アナログ/デジタル変換器に入力される前記第1および第2の信号が同相となるように、入力された前記第1または第2の信号を反転させるように構成される、請求項2に記載の半導体装置。 - 前記スイッチ制御回路は、前記励磁信号のゼロクロス点のタイミングで、前記第1または第2の信号が反転するように、前記スイッチ回路の切り替えのタイミングを制御する、請求項3に記載の半導体装置。
- 前記スイッチ制御回路は、前記算出された角度に基づいて、前記第1および第2の入力部にそれぞれ入力された前記第1および第2の信号が同相から逆相または逆相から同相に変化したことを検出した場合、同相と逆相とが切り替わった時点よりも所定角度だけ前記算出された角度がさらに変化したタイミングで、前記スイッチ回路を切り替えるように構成される、請求項3に記載の半導体装置。
- 前記スイッチ回路は、前記第1の入力部と前記マルチプレクサとの間に接続され、前記第2の入力部と前記マルチプレクサとの間には接続されておらず、
前記スイッチ制御回路は、前記算出された角度が90度以上180度以下のときまたは270°以上360°以下のとき、前記スイッチ回路によって前記第1の信号を反転させるように構成される、請求項3に記載の半導体装置。 - 前記スイッチ回路は、前記第2の入力部と前記マルチプレクサとの間に接続され、前記第1の入力部と前記マルチプレクサとの間には接続されておらず、
前記スイッチ制御回路は、前記算出された角度が90度以上180度以下のときまたは270°以上360°以下のとき、前記スイッチ回路によって前記第2の信号を反転させるように構成される、請求項3に記載の半導体装置。 - 前記半導体装置は、前記スイッチ回路として、
前記第1の入力部と前記マルチプレクサとの間に接続された第1のスイッチ回路と、
前記第2の入力部と前記マルチプレクサとの間に接続された第2のスイッチ回路とを含み、
前記スイッチ制御回路は、
前記算出された角度が180度以上360度以下のとき、前記第1のスイッチ回路によって前記第1の信号を反転させ、
前記算出された角度が90度以上270度以下のとき、前記第2のスイッチ回路によって前記第2の信号を反転させるように構成される、請求項3に記載の半導体装置。 - 前記半導体装置は、前記スイッチ回路として、
前記第1の入力部と前記マルチプレクサとの間に接続された第1のスイッチ回路と、
前記第2の入力部と前記マルチプレクサとの間に接続された第2のスイッチ回路とを含み、
前記スイッチ制御回路は、
前記算出された角度が0度以上90度以下のとき、前記第1のスイッチ回路によって前記第1の信号を反転させ、
前記算出された角度が0度以上90度以下または270度以上360度以下のとき、前記第2のスイッチ回路によって前記第2の信号を反転させるように構成される、請求項3に記載の半導体装置。 - 前記第1および第2の信号は差動信号であり、
前記スイッチ回路は、入力される前記第1または第2の信号の正側信号と負側信号とを入れ替えることによって、前記第1または第2の信号を反転させるように構成される、請求項1に記載の半導体装置。 - 第1の信号が入力される第1の入力部と、
第2の信号が入力される第2の入力部と、
前記第1および第2の信号の一方を選択するマルチプレクサと、
前記マルチプレクサの出力信号をデジタル値に変換するアナログ/デジタル変換器と、
前記アナログ/デジタル変換器によってデジタル値に変換された前記第1および第2の信号に基づいて演算処理を行う演算回路と、
前記第1および第2の入力部の少なくとも一方と前記マルチプレクサとの間に接続されたスイッチ回路とを備え、
前記スイッチ回路は、入力された前記第1または第2の信号を反転可能に構成される、半導体装置。 - 同期モータに接続されたレゾルバの出力信号に基づいて前記同期モータを駆動制御するモータ制御装置であって、
前記レゾルバは、検出する角度の正弦を表す第1の信号と前記角度の余弦を表す第2の信号とを出力し、
前記モータ制御装置は、
前記同期モータに供給するモータ電圧を生成するインバータ回路と、
前記第1および第2の信号に基づいて前記角度を算出するレゾルバ/デジタルコンバータと、
前記算出された角度に基づいて、前記インバータ回路を制御する制御信号を生成するプロセッサとを備え、
前記レゾルバ/デジタルコンバータは、
前記第1の信号が入力される第1の入力部と、
前記第2の信号が入力される第2の入力部と、
前記第1および第2の信号の一方を選択するマルチプレクサと、
前記マルチプレクサの出力信号をデジタル値に変換するアナログ/デジタル変換器と、
前記第1および第2の入力部の少なくとも一方と前記マルチプレクサとの間に接続されたスイッチ回路とを含み、
前記スイッチ回路は、入力された前記第1または第2の信号を反転可能に構成される、モータ制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015015618A JP6527704B2 (ja) | 2015-01-29 | 2015-01-29 | 半導体装置 |
| US14/991,978 US10033397B2 (en) | 2015-01-29 | 2016-01-10 | Semiconductor device |
| CN201610036818.8A CN105841603B (zh) | 2015-01-29 | 2016-01-20 | 半导体器件 |
| EP16153378.1A EP3054598A1 (en) | 2015-01-29 | 2016-01-29 | A resolver-to-digital converter with a lower error of the conversion angle |
| US16/031,872 US10530383B2 (en) | 2015-01-29 | 2018-07-10 | Semiconductor device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015015618A JP6527704B2 (ja) | 2015-01-29 | 2015-01-29 | 半導体装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016138870A true JP2016138870A (ja) | 2016-08-04 |
| JP6527704B2 JP6527704B2 (ja) | 2019-06-05 |
Family
ID=55272334
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015015618A Active JP6527704B2 (ja) | 2015-01-29 | 2015-01-29 | 半導体装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US10033397B2 (ja) |
| EP (1) | EP3054598A1 (ja) |
| JP (1) | JP6527704B2 (ja) |
| CN (1) | CN105841603B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019093074A1 (ja) * | 2017-11-07 | 2019-05-16 | 株式会社松尾製作所 | 電気角取得システム、電気角取得方法、電気角取得プログラム、電気角取得特性測定システム、電気角取得特性測定方法および電気角取得特性測定プログラム |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016018383A1 (en) | 2014-07-31 | 2016-02-04 | Hewlett-Packard Development Company | Live migration of data |
| WO2016036347A1 (en) | 2014-09-02 | 2016-03-10 | Hewlett Packard Enterprise Development Lp | Serializing access to fault tolerant memory |
| US10594442B2 (en) | 2014-10-24 | 2020-03-17 | Hewlett Packard Enterprise Development Lp | End-to-end negative acknowledgment |
| WO2016122637A1 (en) | 2015-01-30 | 2016-08-04 | Hewlett Packard Enterprise Development Lp | Non-idempotent primitives in fault-tolerant memory |
| WO2016122610A1 (en) | 2015-01-30 | 2016-08-04 | Hewlett Packard Enterprise Development Lp | Preventing data corruption and single point of failure in a fault-tolerant memory |
| WO2016122642A1 (en) | 2015-01-30 | 2016-08-04 | Hewlett Packard Enterprise Development Lp | Determine failed components in fault-tolerant memory |
| WO2016159996A1 (en) | 2015-03-31 | 2016-10-06 | Hewlett Packard Enterprise Development Lp | Preventing data corruption and single point of failure in fault-tolerant memory fabrics |
| US10193634B2 (en) | 2016-09-19 | 2019-01-29 | Hewlett Packard Enterprise Development Lp | Optical driver circuits |
| US10389342B2 (en) * | 2017-06-28 | 2019-08-20 | Hewlett Packard Enterprise Development Lp | Comparator |
| US11722343B1 (en) * | 2022-05-13 | 2023-08-08 | Hamilton Sundstrand Corporation | Resolver integral demodulation using zero crossing points |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4594540A (en) * | 1984-10-03 | 1986-06-10 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Angular measurement system |
| JPS6243501A (ja) * | 1985-08-20 | 1987-02-25 | Kobe Steel Ltd | 角度検出装置 |
| JPH0375522A (ja) * | 1989-08-18 | 1991-03-29 | Anritsu Corp | レゾルバ/ディジタルコンバータ |
| JP2004279231A (ja) * | 2003-03-17 | 2004-10-07 | Minebea Co Ltd | R/dコンバータ |
| JP2011257254A (ja) * | 2010-06-09 | 2011-12-22 | Hitachi Automotive Systems Ltd | 回転角検出装置 |
| JP2013024577A (ja) * | 2011-07-15 | 2013-02-04 | Mitsubishi Electric Corp | レゾルバによる角度検出方法 |
| JP2013160720A (ja) * | 2012-02-08 | 2013-08-19 | Denso Corp | 回転角検出装置 |
| JP2013200141A (ja) * | 2012-03-23 | 2013-10-03 | Toshiba Corp | 角度検出装置およびモータ駆動制御装置 |
| US20140055129A1 (en) * | 2012-08-24 | 2014-02-27 | Hamilton Sundstrand Corporation | Resolver interface |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3516084A (en) * | 1967-07-17 | 1970-06-02 | Sperry Rand Corp | Analog-to-digital converter |
| US3594783A (en) * | 1969-08-07 | 1971-07-20 | Giddings & Lewis | Apparatus for numerical signaling of positions, including digital-to-analog converter |
| US3713141A (en) * | 1971-05-21 | 1973-01-23 | Us Navy | Synchro-to-digital conversion method and apparatus |
| US3843877A (en) * | 1973-02-06 | 1974-10-22 | Sperry Rand Corp | Air data computer including dc to synchro signal converter |
| JPS49117755U (ja) * | 1973-02-09 | 1974-10-08 | ||
| US4149260A (en) | 1977-09-14 | 1979-04-10 | General Motors Corporation | Analog to digital converter for providing the digital representation of an angle |
| US4281316A (en) * | 1978-08-11 | 1981-07-28 | The Singer Company | Successive approximation S/D converter with inherent quantization error centering |
| US4334179A (en) * | 1980-06-16 | 1982-06-08 | Sperry Corporation | Apparatus for demodulating a pulse excited synchro position sensor |
| JPS58127294A (ja) * | 1982-01-26 | 1983-07-29 | 株式会社東芝 | デイジタル移動検出装置 |
| CH675486A5 (ja) | 1988-03-16 | 1990-09-28 | Tecnospace S A | |
| US6525502B1 (en) * | 1999-09-02 | 2003-02-25 | Aspen Motion Technologies, Inc. | Closed loop control of motor position and velocity |
| GB0126014D0 (en) * | 2001-10-30 | 2001-12-19 | Sensopad Technologies Ltd | Modulated field position sensor |
| JP2004309285A (ja) | 2003-04-07 | 2004-11-04 | Minebea Co Ltd | R/dコンバータ |
| KR100634588B1 (ko) * | 2003-12-30 | 2006-10-13 | 현대자동차주식회사 | 영구자석 동기모터 제어시스템 및 제어방법 |
| EP1752740B1 (en) * | 2005-08-11 | 2008-12-03 | Mitutoyo Corporation | Method and Circuit for interpolating an Encoder Output |
| US8630587B2 (en) * | 2008-07-11 | 2014-01-14 | Qualcomm Incorporated | Inter-cell interference cancellation framework |
| US7977936B2 (en) * | 2008-10-16 | 2011-07-12 | Hamilton Sundstrand Corporation | Resolver interface and signal conditioner |
| CN202841081U (zh) * | 2012-10-26 | 2013-03-27 | 浙江工贸职业技术学院 | 基于cordic算法的dds波形发生器 |
| FR2999363B1 (fr) * | 2012-12-10 | 2018-12-07 | Continental Automotive France | Ensemble de detection de position a tension de decalage diminuee et procede utilisant un tel ensemble |
| CN103178809B (zh) * | 2013-02-04 | 2016-02-17 | 深圳市鼎阳科技有限公司 | 一种dds脉冲边沿调节方法、模块和脉冲信号发生器 |
-
2015
- 2015-01-29 JP JP2015015618A patent/JP6527704B2/ja active Active
-
2016
- 2016-01-10 US US14/991,978 patent/US10033397B2/en active Active
- 2016-01-20 CN CN201610036818.8A patent/CN105841603B/zh active Active
- 2016-01-29 EP EP16153378.1A patent/EP3054598A1/en not_active Ceased
-
2018
- 2018-07-10 US US16/031,872 patent/US10530383B2/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4594540A (en) * | 1984-10-03 | 1986-06-10 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Angular measurement system |
| JPS6243501A (ja) * | 1985-08-20 | 1987-02-25 | Kobe Steel Ltd | 角度検出装置 |
| JPH0375522A (ja) * | 1989-08-18 | 1991-03-29 | Anritsu Corp | レゾルバ/ディジタルコンバータ |
| JP2004279231A (ja) * | 2003-03-17 | 2004-10-07 | Minebea Co Ltd | R/dコンバータ |
| JP2011257254A (ja) * | 2010-06-09 | 2011-12-22 | Hitachi Automotive Systems Ltd | 回転角検出装置 |
| JP2013024577A (ja) * | 2011-07-15 | 2013-02-04 | Mitsubishi Electric Corp | レゾルバによる角度検出方法 |
| JP2013160720A (ja) * | 2012-02-08 | 2013-08-19 | Denso Corp | 回転角検出装置 |
| JP2013200141A (ja) * | 2012-03-23 | 2013-10-03 | Toshiba Corp | 角度検出装置およびモータ駆動制御装置 |
| US20140055129A1 (en) * | 2012-08-24 | 2014-02-27 | Hamilton Sundstrand Corporation | Resolver interface |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019093074A1 (ja) * | 2017-11-07 | 2019-05-16 | 株式会社松尾製作所 | 電気角取得システム、電気角取得方法、電気角取得プログラム、電気角取得特性測定システム、電気角取得特性測定方法および電気角取得特性測定プログラム |
| JP2019086410A (ja) * | 2017-11-07 | 2019-06-06 | 株式会社松尾製作所 | 電気角取得システム、電気角取得方法、電気角取得プログラム、電気角取得特性測定システム、電気角取得特性測定方法および電気角取得特性測定プログラム |
| JP7251751B2 (ja) | 2017-11-07 | 2023-04-04 | 株式会社松尾製作所 | 電気角取得システム、電気角取得方法、電気角取得プログラム、電気角取得特性測定システム、電気角取得特性測定方法および電気角取得特性測定プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6527704B2 (ja) | 2019-06-05 |
| US10033397B2 (en) | 2018-07-24 |
| EP3054598A1 (en) | 2016-08-10 |
| US20180323797A1 (en) | 2018-11-08 |
| CN105841603A (zh) | 2016-08-10 |
| CN105841603B (zh) | 2020-11-10 |
| US20160226508A1 (en) | 2016-08-04 |
| US10530383B2 (en) | 2020-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6527704B2 (ja) | 半導体装置 | |
| JP4732106B2 (ja) | モータ制御装置及びモータ制御方法 | |
| US9255817B2 (en) | Rotation-angle detection device, image processing apparatus, and rotation-angle detection method | |
| JP5173962B2 (ja) | レゾルバ/デジタル変換装置およびレゾルバ/デジタル変換方法 | |
| JP2013200141A (ja) | 角度検出装置およびモータ駆動制御装置 | |
| JP4835606B2 (ja) | 回転体の位相・速度検出装置 | |
| JP2014236649A (ja) | 制御装置 | |
| JP2010022150A (ja) | マイクロコンピュータ,モータ制御システム,レゾルバ信号のデジタル変換方法 | |
| JP6667320B2 (ja) | 信号処理器及び制御装置 | |
| JP2015132593A (ja) | 回転角度検出装置、回転角度検出方法及び画像形成装置 | |
| JP2015135283A (ja) | 回転角検出装置、パルス信号生成回路 | |
| JP2013224865A (ja) | 信号処理装置 | |
| JP5895680B2 (ja) | 信号処理装置 | |
| KR101012740B1 (ko) | 레졸버 디지털 변환장치 및 이를 이용한 위치 측정 장치 | |
| JP2013198229A (ja) | Δς変調型a/d変換器およびそれを備えたモータ制御装置 | |
| JP2013250084A (ja) | 回転角度検出装置、画像処理装置及び回転角度検出方法 | |
| JP2011257254A (ja) | 回転角検出装置 | |
| JP2005147729A (ja) | 回転角検出装置 | |
| JP5823785B2 (ja) | 回転角度検出装置 | |
| JPH10117489A (ja) | 位相制御装置 | |
| Ji et al. | A method of speed measurement for servo motor drive with sinusoidal quadrature encoder | |
| Ismail et al. | Integrally accurate resolver-to-digital converter (RDC) | |
| JP2005137080A (ja) | モータ制御装置 | |
| JPS62162917A (ja) | 位相検出装置 | |
| JPH10281809A (ja) | 位置検出装置とモータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171113 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180919 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181225 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190513 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6527704 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |