JP2012504085A - 配送荷物を受け取るシステムおよび方法 - Google Patents
配送荷物を受け取るシステムおよび方法 Download PDFInfo
- Publication number
- JP2012504085A JP2012504085A JP2011529347A JP2011529347A JP2012504085A JP 2012504085 A JP2012504085 A JP 2012504085A JP 2011529347 A JP2011529347 A JP 2011529347A JP 2011529347 A JP2011529347 A JP 2011529347A JP 2012504085 A JP2012504085 A JP 2012504085A
- Authority
- JP
- Japan
- Prior art keywords
- package
- image
- delivery
- exception
- delivery package
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 54
- 238000012544 monitoring process Methods 0.000 claims description 222
- 238000001514 detection method Methods 0.000 claims description 15
- 230000004044 response Effects 0.000 claims description 11
- 238000004458 analytical method Methods 0.000 claims description 4
- 238000003384 imaging method Methods 0.000 abstract description 54
- 239000000463 material Substances 0.000 abstract description 26
- 230000002950 deficient Effects 0.000 abstract 1
- 230000032258 transport Effects 0.000 description 50
- 238000012545 processing Methods 0.000 description 9
- 238000004891 communication Methods 0.000 description 5
- 230000005670 electromagnetic radiation Effects 0.000 description 5
- 230000005855 radiation Effects 0.000 description 5
- 239000002131 composite material Substances 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 238000012015 optical character recognition Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 238000004846 x-ray emission Methods 0.000 description 3
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000004806 packaging method and process Methods 0.000 description 2
- 239000004925 Acrylic resin Substances 0.000 description 1
- 229920000178 Acrylic resin Polymers 0.000 description 1
- VVQNEPGJFQJSBK-UHFFFAOYSA-N Methyl methacrylate Chemical compound COC(=O)C(C)=C VVQNEPGJFQJSBK-UHFFFAOYSA-N 0.000 description 1
- 229920005372 Plexiglas® Polymers 0.000 description 1
- 230000002730 additional effect Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000003708 edge detection Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 238000003032 molecular docking Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 239000012780 transparent material Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images











Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/06—Recognition of objects for industrial automation
Landscapes
- Business, Economics & Management (AREA)
- Engineering & Computer Science (AREA)
- Economics (AREA)
- Quality & Reliability (AREA)
- Tourism & Hospitality (AREA)
- Human Resources & Organizations (AREA)
- Marketing (AREA)
- Operations Research (AREA)
- Development Economics (AREA)
- Strategic Management (AREA)
- Entrepreneurship & Innovation (AREA)
- Physics & Mathematics (AREA)
- General Business, Economics & Management (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Warehouses Or Storage Devices (AREA)
- Sorting Of Articles (AREA)
Abstract
Description
(50)(44)の方法であって、ベンダー識別子および例外識別子と前記配送荷物とを関連付け、前記ベンダー識別子および例外識別子にもとづいて、例外を自動的に解消する。
本出願は、米国特許出願第12/241,475号(「配送荷物を受け取るシステムおよび方法」、2008年9月30日出願)、米国特許出願第12/329,927号(「配送荷物を受け取るシステムおよび方法」、2008年12月8日出願)を基礎として優先権を主張する。両出願の内容は、参照により本明細書に援用される。
Claims (15)
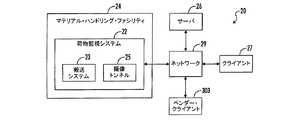
- 荷物監視システムであって、
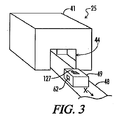
トンネルと、
前記トンネルを通って配送荷物を移動するように構成されている搬送システムと、
前記配送荷物を感知するように構成されているセンサと、
カメラと、
前記配送荷物が前記トンネルの中にある間、該配送荷物の画像を前記カメラが取得するように、前記センサにもとづいて、該カメラを制御するように構成されている手段と、
を備え、
前記手段は、さらに、前記配送荷物の識別子と前記画像とを関連付けるように構成されている、
荷物監視システム。 - 前記手段は、前記画像を分析し、該画像にもとづいて、前記配送荷物の例外を検出するように構成されている、請求項1に記載の荷物監視システム。
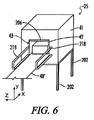
- 複数のカメラをさらに備え、
前記手段は、前記カメラおよび前記複数のカメラが前記配送荷物の面の各々の画像を取得するように、該複数のカメラを制御するように構成されている、
請求項1に記載の荷物監視システム。 - 前記搬送システムは、
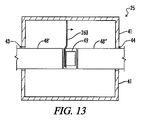
前記トンネルの中へ延びる第一の搬送ベルトと、
前記トンネルの中へ延びる第二の搬送ベルトと、
前記第一の搬送ベルトおよび第二の搬送ベルトの間の透明経路部分と、
を備え、
前記カメラは、前記透明経路部分を介して前記画像を取得するように、配置されている、
請求項1に記載の荷物監視システム。 - 前記配送荷物が前記トンネルの中にある間に、該配送荷物のX線画像を取得するように構成されているX線システムをさらに備え、
前記手段は、前記識別子と前記X線画像とを関連付けるように構成されている、
請求項1に記載の荷物監視システム。 - 前記手段は、前記画像にもとづいて、前記配送荷物に付着されているラベルによって示される荷物パラメータを判断するように構成されている、請求項1に記載の荷物監視システム。
- 荷物監視方法であって、
トンネルを通るように配送荷物を移動し、
前記配送荷物を感知し、
前記トンネルの中に前記配送荷物がある間に、該配送荷物の感知にもとづいて、該配送荷物の画像を自動的に取得し、
前記画像を保存し、
前記配送荷物の識別子と前記画像とを自動的に関連付ける、
荷物監視方法。 - 前記画像を自動的に分析し、
前記画像の分析にもとづいて、前記配送荷物の例外を自動的に検出する、
ことをさらに含む、請求項7に記載の荷物監視方法。 - 前記配送荷物に含まれているアイテムの数を自動的に判断し、
前記数にもとづいて前記配送荷物の例外を自動的に検出する、
ことをさらに含む、請求項7に記載の方法。 - 荷物受け取りシステムであって、
第一の経路に沿って配送荷物を移動するように構成されている搬送システムと、
前記配送荷物の画像を取得するように構成されているカメラと、
取得した前記画像を分析し、取得した該画像から前記配送荷物の追跡情報を読み取るように構成されている手段と、
を備え、
前記手段は、さらに、前記追跡情報にもとづいて前記配送荷物の例外を検出し、該例外の検出に応じて、該配送荷物が前記第一の経路から第二の経路に向けられるように、前記搬送システムを制御するように構成されている、
荷物受け取りシステム。 - 前記第一の経路は、該第一の経路から受け取られる配送荷物が開封される受け取り位置に延び、
前記第二の経路は、該第二の経路から受け取られる荷物が蓄積される例外ビンに延びる、
請求項10に記載の荷物受け取りシステム。 - 前記配送荷物のベンダーに関連付けられている連絡情報を保存するように構成されている記憶手段をさらに備え、
前記手段は、前記連絡情報を取り出し、前記連絡情報にもとづいて、前記ベンダーに取得された前記画像を定義する画像データを送信するように構成されている、
請求項10に記載の荷物受け取りシステム。 - 前記例外がどのように解消されるかを示すデータを保存するように構成されている記憶手段をさらに備え、
前記データは、前記配送荷物のベンダーを識別するベンダー識別子と関連付けられており、
前記手段は、前記ベンダー識別子にもとづいて、前記データにアクセスし、該データにもとづいて前記例外を解消するように構成されている、
請求項10に記載の荷物受け取りシステム。 - 荷物受け取り方法であって、
搬送システムの第一の経路に沿って配送荷物を移動し、
前記配送荷物の画像を取得し、
取得された前記画像から、前記配送荷物の追跡情報を読み取り、
前記追跡情報の読み取りによって読み取られる前記追跡情報にもとづいて例外を検出し、
前記例外の検出に応じて前記搬送システムの第二の経路に沿って前記配送荷物を移動する、
荷物受け取り方法。 - ベンダー識別子および例外識別子と、前記配送荷物とを関連付け、
前記ベンダー識別子および例外識別子にもとづいて、前記例外を自動的に解消する、
請求項14に記載の方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/241,475 | 2008-09-30 | ||
| US12/241,475 US8639384B2 (en) | 2008-09-30 | 2008-09-30 | Systems and methods for receiving shipment parcels |
| US12/329,927 | 2008-12-08 | ||
| US12/329,927 US8489232B2 (en) | 2008-09-30 | 2008-12-08 | Systems and methods for receiving shipment parcels |
| PCT/US2009/058771 WO2010039702A1 (en) | 2008-09-30 | 2009-09-29 | Systems and methods for receiving shipment parcels |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012504085A true JP2012504085A (ja) | 2012-02-16 |
| JP5746033B2 JP5746033B2 (ja) | 2015-07-08 |
Family
ID=42058271
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011529347A Active JP5746033B2 (ja) | 2008-09-30 | 2009-09-29 | 配送荷物を受け取るシステムおよび方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US8489232B2 (ja) |
| EP (1) | EP2335200B1 (ja) |
| JP (1) | JP5746033B2 (ja) |
| CN (1) | CN102232222B (ja) |
| CA (2) | CA2998389C (ja) |
| ES (1) | ES2563464T3 (ja) |
| PL (1) | PL2335200T3 (ja) |
| WO (1) | WO2010039702A1 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016037367A (ja) * | 2014-08-08 | 2016-03-22 | 三栄機工株式会社 | 宅配物搬送仕分システム |
| JP2016141541A (ja) * | 2015-02-04 | 2016-08-08 | 株式会社ダイフク | 検品装置 |
| JP2017527873A (ja) * | 2014-06-26 | 2017-09-21 | アマゾン テクノロジーズ インコーポレイテッド | 視覚キューに基づいて自動化タスクを実施すること |
| JP2018012059A (ja) * | 2016-07-20 | 2018-01-25 | 株式会社東芝 | 荷物検査システム |
| JP2018016489A (ja) * | 2016-07-29 | 2018-02-01 | パナソニックIpマネジメント株式会社 | 荷物追跡システム及び荷物追跡方法 |
| JP2020056596A (ja) * | 2018-09-28 | 2020-04-09 | 日本電気株式会社 | 荷物引受装置及び荷物引受方法 |
| JP2021066542A (ja) * | 2019-10-18 | 2021-04-30 | 株式会社キッツ | 判定装置、判定方法および判定プログラム |
| JP2021151925A (ja) * | 2020-04-16 | 2021-09-30 | 株式会社東芝 | 仕分管理装置及び検査システム |
Families Citing this family (70)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8977385B2 (en) * | 2004-11-22 | 2015-03-10 | Bell And Howell, Llc | System and method for tracking a mail item through a document processing system |
| US8957970B1 (en) * | 2009-09-10 | 2015-02-17 | Amazon Technologies, Inc. | Receiving items into inventory |
| US8350675B2 (en) * | 2010-04-30 | 2013-01-08 | Symbol Technologies, Inc. | Triggering a radio frequency identification scan using image recognition |
| IT1405591B1 (it) * | 2010-05-17 | 2014-01-17 | Ingegneria Biomedica Santa Lucia S P A | Dispositivo e metodo per la gestione automatizzata di confezioni di farmaci e dispositivi medici |
| US9004347B2 (en) * | 2010-11-12 | 2015-04-14 | Greif Packaging Llc | Method and apparatus for verifying stack size |
| US9685065B2 (en) * | 2013-01-03 | 2017-06-20 | Sensolid Bvba | Dual sensor system and related data manipulation methods and uses |
| CN104331349A (zh) * | 2013-07-22 | 2015-02-04 | 鸿富锦精密工业(深圳)有限公司 | 产品断差检测系统、装置及方法 |
| CN104718447B (zh) | 2013-10-03 | 2017-07-28 | 世高株式会社 | 包装体的检查装置 |
| US9239943B2 (en) | 2014-05-29 | 2016-01-19 | Datalogic ADC, Inc. | Object recognition for exception handling in automatic machine-readable symbol reader systems |
| TWI494538B (zh) * | 2014-06-25 | 2015-08-01 | Ind Tech Res Inst | 物體量測系統及方法 |
| US9453758B2 (en) | 2014-07-23 | 2016-09-27 | Ricoh Company, Ltd. | Digital locker delivery system |
| US9396404B2 (en) | 2014-08-04 | 2016-07-19 | Datalogic ADC, Inc. | Robust industrial optical character recognition |
| US10102532B2 (en) * | 2014-11-17 | 2018-10-16 | Amazon Technologies, Inc. | Tracking and verifying authenticity of items |
| US10318962B2 (en) | 2014-11-17 | 2019-06-11 | Amazon Technologies, Inc. | Authenticity label for items |
| US9305216B1 (en) * | 2014-12-15 | 2016-04-05 | Amazon Technologies, Inc. | Context-based detection and classification of actions |
| US9482522B2 (en) * | 2015-01-26 | 2016-11-01 | Ricoh Company, Ltd. | Digital locker |
| CA2976316A1 (en) * | 2015-02-27 | 2016-09-01 | Pulsar S.R.L. | A plant for processing products including a unit for detecting defective products |
| EP3848867A1 (en) | 2015-03-18 | 2021-07-14 | United Parcel Service Of America, Inc. | Systems and methods for verifying the contents of a shipment |
| US9798948B2 (en) | 2015-07-31 | 2017-10-24 | Datalogic IP Tech, S.r.l. | Optical character recognition localization tool |
| CA3153451A1 (en) * | 2015-11-02 | 2017-05-11 | Sargent Manufacturing Company | Methods and systems for ensuring secure delivery of parcels using internet-enabled storage receptacle |
| ES2711809T3 (es) * | 2016-02-04 | 2019-05-07 | Mettler Toledo Gmbh | Aparato y métodos para dimensionar un objeto transportado por un vehículo que se mueve en un campo de medición |
| EP3203264B1 (en) * | 2016-02-04 | 2024-08-28 | Mettler-Toledo GmbH | Method of imaging an object for tracking and documentation during transportation and storage |
| CN107153931B (zh) * | 2016-03-03 | 2020-11-20 | 重庆邮电大学 | 一种快递物流配送异常检测方法 |
| EP3424026A4 (en) | 2016-03-04 | 2019-11-06 | Datalogic USA, Inc. | DEVICE AND SYSTEM FOR HIGH SPEED LOW RANGE SCANNING OF BAR CODES |
| GB2596431B (en) | 2016-05-13 | 2022-06-15 | Walmart Apollo Llc | Systems and methods for sortation of products using a conveyor assembly |
| US10521756B2 (en) * | 2016-06-03 | 2019-12-31 | International Business Machines Corporation | Managing delivery of environmentally sensitive products |
| US9987665B2 (en) * | 2016-07-18 | 2018-06-05 | Siemens Industry, Inc. | Separation of machinable parcels from non-machinable parcel stream |
| JP2018013939A (ja) * | 2016-07-20 | 2018-01-25 | 株式会社東芝 | 荷物検査システム、および荷物検査プログラム |
| CN106768228A (zh) * | 2016-12-23 | 2017-05-31 | 天津市天地申通物流有限公司 | 包裹检测设备和包裹检测方法 |
| CN106733729A (zh) * | 2017-01-25 | 2017-05-31 | 红塔烟草(集团)有限责任公司 | 图像检测装置及条烟图像检测装置 |
| CN107167478A (zh) * | 2017-04-25 | 2017-09-15 | 明基材料有限公司 | 片材面内标记检测方法及装置 |
| CN108858179B (zh) * | 2017-05-09 | 2020-11-24 | 北京京东尚科信息技术有限公司 | 确定分拣机器人行车路径的方法和装置 |
| US10427846B2 (en) | 2017-06-02 | 2019-10-01 | Walmart Apollo, Llc | System and method for determining package tampering |
| JP6923383B2 (ja) * | 2017-07-27 | 2021-08-18 | 株式会社日立物流 | ピッキングロボットおよびピッキングシステム |
| CN107497702A (zh) * | 2017-09-06 | 2017-12-22 | 苏州金峰物流设备有限公司 | 自动称重合流分拣机以及货物合流摆正方法 |
| US20190130417A1 (en) * | 2017-10-27 | 2019-05-02 | Amazon Technologies, Inc. | Systems and methods to establish digital chain of custody |
| WO2019190916A1 (en) | 2018-03-30 | 2019-10-03 | Walmart Apollo, Llc | Systems and methods for distributing merchandise and merchandise kits at emergency locations |
| US12024370B2 (en) | 2018-05-16 | 2024-07-02 | Bel Usa, Llc | Automated shipping processor line and method for automatically shipping packages |
| CN109127445B (zh) * | 2018-06-04 | 2021-05-04 | 顺丰科技有限公司 | 条码读取方法及条码读取系统 |
| CN109000560B (zh) * | 2018-06-11 | 2021-07-06 | 广东工业大学 | 基于三维相机检测包裹尺寸的方法、装置以及设备 |
| CN110732493A (zh) * | 2018-07-18 | 2020-01-31 | 大连因特视智能传感科技有限公司 | 具有基于图像处理的可编程伸缩分拣模组的货物分拣设备 |
| US20200094401A1 (en) * | 2018-09-21 | 2020-03-26 | Beijing Jingdong Shangke Information Technology Co., Ltd. | System and method for automatic learning of product manipulation |
| KR102650494B1 (ko) | 2018-10-30 | 2024-03-22 | 무진 아이엔씨 | 자동화된 패키지 등록 시스템, 디바이스 및 방법 |
| CA3122065A1 (en) * | 2018-12-06 | 2020-06-11 | Walmart Apollo, Llc | Relabeling system for unlabeled cartons for fast system |
| WO2020154559A1 (en) * | 2019-01-25 | 2020-07-30 | Walmart Apollo, Llc | Conveyor systems and methods for sorting merchandise using interchangeable and assignable sortation modules |
| WO2020157875A1 (ja) * | 2019-01-30 | 2020-08-06 | 株式会社Fuji | 作業座標作成装置 |
| CN111661549B (zh) * | 2019-03-07 | 2022-01-07 | 北京京东乾石科技有限公司 | 出库控制方法、装置、设备及存储介质 |
| EP3946840A4 (en) | 2019-04-04 | 2022-12-28 | Plus One Robotics, Inc. | INDUSTRIAL ROBOTICS SYSTEMS AND METHODS FOR CONTINUOUS AND AUTOMATIC LEARNING |
| US11386636B2 (en) | 2019-04-04 | 2022-07-12 | Datalogic Usa, Inc. | Image preprocessing for optical character recognition |
| US10949635B2 (en) * | 2019-04-11 | 2021-03-16 | Plus One Robotics, Inc. | Systems and methods for identifying package properties in an automated industrial robotics system |
| CN110097323A (zh) * | 2019-05-10 | 2019-08-06 | 深圳市前海云途物流有限公司 | 异常包裹管理方法、装置及计算机可读存储介质 |
| JP7282605B2 (ja) * | 2019-06-06 | 2023-05-29 | 株式会社東芝 | 情報管理装置および情報管理プログラム |
| EP3999994B1 (en) * | 2019-07-15 | 2024-03-27 | Avery Dennison Retail Information Services LLC | Method for missed item recovery in rfid tunnel environments |
| CN112495805A (zh) * | 2019-09-16 | 2021-03-16 | 星猿哲科技(上海)有限公司 | 基于多面读码的拣选系统、方法、电子终端、及存储介质 |
| CN112700179B (zh) * | 2019-10-22 | 2023-11-07 | 菜鸟智能物流控股有限公司 | 包裹追踪方法、装置、系统及包裹检测方法、装置 |
| CN110927178A (zh) * | 2019-12-11 | 2020-03-27 | 浙江一诺机电有限公司 | 一种产品外观、缺陷自动化检测装置 |
| CN113120596B (zh) * | 2019-12-31 | 2022-11-22 | 旺矽科技股份有限公司 | 物料移载状态侦测系统及方法 |
| US11074708B1 (en) * | 2020-01-06 | 2021-07-27 | Hand Held Products, Inc. | Dark parcel dimensioning |
| CN111115194B (zh) * | 2020-03-26 | 2020-09-18 | 山东万物生机械技术有限公司 | 一种带有检测功能的物流包裹输送装置及其工作方法 |
| EP3892394B1 (en) * | 2020-04-08 | 2024-08-14 | ABB Schweiz AG | Method and control system for delivering rolling stock to a cooling bed |
| CN111723886A (zh) * | 2020-06-28 | 2020-09-29 | 杭州海康机器人技术有限公司 | 包裹检测方法、装置和平台 |
| CN117769648A (zh) * | 2021-01-19 | 2024-03-26 | 西姆伯蒂克加拿大有限公司 | 装箱货物检验系统及其方法 |
| CN113298469A (zh) * | 2021-05-26 | 2021-08-24 | 西安京迅递供应链科技有限公司 | 异常数据检测方法、装置、电子设备和存储介质 |
| CN114289331B (zh) * | 2021-10-20 | 2024-07-09 | 浙江菜鸟供应链管理有限公司 | 数据处理方法、装置、电子设备和存储介质 |
| US11769245B2 (en) * | 2021-10-21 | 2023-09-26 | Goodrich Corporation | Systems and methods of monitoring cargo load systems for damage detection |
| CN114169473A (zh) * | 2021-12-02 | 2022-03-11 | 张秋生 | 一种基于图形识别的商品信息鉴定分析系统 |
| US20230245460A1 (en) * | 2022-02-02 | 2023-08-03 | Everseen Limited | System and method for surveillance of goods |
| CN115140471B (zh) * | 2022-06-29 | 2024-01-02 | 山东西部智能科技有限公司 | 一种物品管理方法、系统、设备及计算机可读存储介质 |
| DE102022134121A1 (de) | 2022-12-20 | 2024-07-04 | Körber Supply Chain Logistics Gmbh | Verfahren zum Analysieren von Störungen bei einem Betrieb eines Handhabungssystems, Verfahren zum Trainieren oder Umtrainieren eines Klassifikators, Computerprogramm und System zum Analysieren von Störungen |
| CN118506250A (zh) * | 2024-07-16 | 2024-08-16 | 深圳市一秋医纺科技有限公司 | 一种医用织物分拣异常识别方法及装置 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5987081A (ja) * | 1982-11-09 | 1984-05-19 | 池上通信機株式会社 | 外観品位検査方式 |
| JPS6334523A (ja) * | 1986-07-30 | 1988-02-15 | Maki Seisakusho:Kk | 果実・そ菜類の撮像用照明装置 |
| JPH085563A (ja) * | 1994-06-20 | 1996-01-12 | Shirayanagishiki Senkaki Kk | 塊状青果物のカメラ選別機に用いる間接照明型多面撮影装置 |
| JPH1034088A (ja) * | 1996-07-25 | 1998-02-10 | Mitsubishi Heavy Ind Ltd | ガラスカレット分別装置 |
| JPH10231005A (ja) * | 1997-02-19 | 1998-09-02 | Murata Mach Ltd | パッケージ搬送システム |
| JP2000503401A (ja) * | 1996-10-30 | 2000-03-21 | クロネス・アクチェンゲゼルシャフト | びん等の検査装置 |
| JP2000140771A (ja) * | 1998-11-10 | 2000-05-23 | Fuji Photo Film Co Ltd | レンズ付きフイルムユニットリサイクルラインの品種毎の仕分け装置 |
| JP2002087532A (ja) * | 2000-09-14 | 2002-03-27 | Denso Corp | 物流管理システム |
| JP2003065974A (ja) * | 2001-08-30 | 2003-03-05 | Shimadzu Corp | 放射線検査装置 |
| JP2006264914A (ja) * | 2005-03-24 | 2006-10-05 | Midori Service Kk | 入荷検品システム |
| JP2007304866A (ja) * | 2006-05-11 | 2007-11-22 | Takenaka Komuten Co Ltd | 情報読取システム、情報読取方法及び情報読取プログラム |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4630051A (en) * | 1985-03-01 | 1986-12-16 | Holodyne Ltd., 1986 | Imaging doppler interferometer |
| DE19535038A1 (de) * | 1994-09-22 | 1996-03-28 | Nec Corp | Vorrichtung und Verfahren zum Erfassen einer Aufkleber/Fenster-Position |
| US6517004B2 (en) * | 1995-12-18 | 2003-02-11 | Metrologic Instruments, Inc. | Automated system for identifying and dimensioning packages transported through a laser scanning tunnel using laser scanning beam indexing techniques |
| US6554189B1 (en) * | 1996-10-07 | 2003-04-29 | Metrologic Instruments, Inc. | Automated system and method for identifying and measuring packages transported through a laser scanning tunnel |
| US5838759A (en) * | 1996-07-03 | 1998-11-17 | Advanced Research And Applications Corporation | Single beam photoneutron probe and X-ray imaging system for contraband detection and identification |
| US7028899B2 (en) * | 1999-06-07 | 2006-04-18 | Metrologic Instruments, Inc. | Method of speckle-noise pattern reduction and apparatus therefore based on reducing the temporal-coherence of the planar laser illumination beam before it illuminates the target object by applying temporal phase modulation techniques during the transmission of the plib towards the target |
| WO2000033058A2 (en) * | 1998-11-30 | 2000-06-08 | Invision Technologies, Inc. | A nonintrusive inspection system |
| EP1050469B1 (en) * | 1999-04-07 | 2003-03-19 | Ishida Co., Ltd. | Automatic package inspecting system |
| US6400845B1 (en) * | 1999-04-23 | 2002-06-04 | Computer Services, Inc. | System and method for data extraction from digital images |
| US6785718B2 (en) * | 2000-10-23 | 2004-08-31 | Schneider Logistics, Inc. | Method and system for interfacing with a shipping service |
| US7540424B2 (en) * | 2000-11-24 | 2009-06-02 | Metrologic Instruments, Inc. | Compact bar code symbol reading system employing a complex of coplanar illumination and imaging stations for omni-directional imaging of objects within a 3D imaging volume |
| US7708205B2 (en) * | 2003-11-13 | 2010-05-04 | Metrologic Instruments, Inc. | Digital image capture and processing system employing multi-layer software-based system architecture permitting modification and/or extension of system features and functions by way of third party code plug-ins |
| CN100363944C (zh) * | 2001-01-18 | 2008-01-23 | 联邦快递公司 | 对包裹上的信息进行访问的方法及系统 |
| US6580778B2 (en) * | 2001-05-23 | 2003-06-17 | Heimann Systems Gmbh | Inspection device |
| US6707381B1 (en) * | 2001-06-26 | 2004-03-16 | Key-Trak, Inc. | Object tracking method and system with object identification and verification |
| US6959108B1 (en) * | 2001-12-06 | 2005-10-25 | Interactive Design, Inc. | Image based defect detection system |
| US6791050B2 (en) * | 2001-12-07 | 2004-09-14 | Pitney Bowes Inc | Method and apparatus for processing and reducing the amount of return to sender mailpieces |
| JP2005525930A (ja) * | 2002-05-16 | 2005-09-02 | ユナイテッド パーセル サービス オブ アメリカ インコーポレイテッド | 無線周波数の識別技術を用いてパッケージを分類及び配送するシステム及び方法 |
| JP2005111607A (ja) * | 2003-10-07 | 2005-04-28 | Fanuc Ltd | ロボット物流トラッキング装置 |
| US20050199722A1 (en) * | 2003-11-05 | 2005-09-15 | Hernan Borja | Mailpiece automated quality control |
| US7427024B1 (en) * | 2003-12-17 | 2008-09-23 | Gazdzinski Mark J | Chattel management apparatus and methods |
| US7085677B1 (en) * | 2004-04-19 | 2006-08-01 | Amazon Technologies, Inc. | Automatically identifying incongruous item packages |
| US7561717B2 (en) * | 2004-07-09 | 2009-07-14 | United Parcel Service Of America, Inc. | System and method for displaying item information |
| CN2731585Y (zh) * | 2004-09-24 | 2005-10-05 | 上海印钞厂 | 封千单记录查询装置 |
| US7632367B2 (en) * | 2005-04-13 | 2009-12-15 | United Parcel Service Of America, Inc. | Parcel labeling, conveying, and sorting method and apparatus |
| US7991242B2 (en) * | 2005-05-11 | 2011-08-02 | Optosecurity Inc. | Apparatus, method and system for screening receptacles and persons, having image distortion correction functionality |
| KR100650285B1 (ko) * | 2005-05-25 | 2006-11-27 | (주)제이브이엠 | 약포 검사시스템 |
| US7334729B2 (en) * | 2006-01-06 | 2008-02-26 | International Business Machines Corporation | Apparatus, system, and method for optical verification of product information |
| US7775431B2 (en) * | 2007-01-17 | 2010-08-17 | Metrologic Instruments, Inc. | Method of and apparatus for shipping, tracking and delivering a shipment of packages employing the capture of shipping document images and recognition-processing thereof initiated from the point of shipment pickup and completed while the shipment is being transported to its first scanning point to facilitate early customs clearance processing and shorten the delivery time of packages to point of destination |
| US9600797B2 (en) * | 2008-08-29 | 2017-03-21 | United Parcel Service Of America, Inc. | Systems and methods for freight tracking and monitoring |
-
2008
- 2008-12-08 US US12/329,927 patent/US8489232B2/en active Active
-
2009
- 2009-09-29 PL PL09818370T patent/PL2335200T3/pl unknown
- 2009-09-29 CN CN200980147532.5A patent/CN102232222B/zh active Active
- 2009-09-29 ES ES09818370.0T patent/ES2563464T3/es active Active
- 2009-09-29 CA CA2998389A patent/CA2998389C/en active Active
- 2009-09-29 EP EP09818370.0A patent/EP2335200B1/en active Active
- 2009-09-29 WO PCT/US2009/058771 patent/WO2010039702A1/en active Application Filing
- 2009-09-29 CA CA2738810A patent/CA2738810C/en active Active
- 2009-09-29 JP JP2011529347A patent/JP5746033B2/ja active Active
-
2013
- 2013-03-13 US US13/800,378 patent/US20130188039A1/en not_active Abandoned
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5987081A (ja) * | 1982-11-09 | 1984-05-19 | 池上通信機株式会社 | 外観品位検査方式 |
| JPS6334523A (ja) * | 1986-07-30 | 1988-02-15 | Maki Seisakusho:Kk | 果実・そ菜類の撮像用照明装置 |
| JPH085563A (ja) * | 1994-06-20 | 1996-01-12 | Shirayanagishiki Senkaki Kk | 塊状青果物のカメラ選別機に用いる間接照明型多面撮影装置 |
| JPH1034088A (ja) * | 1996-07-25 | 1998-02-10 | Mitsubishi Heavy Ind Ltd | ガラスカレット分別装置 |
| JP2000503401A (ja) * | 1996-10-30 | 2000-03-21 | クロネス・アクチェンゲゼルシャフト | びん等の検査装置 |
| JPH10231005A (ja) * | 1997-02-19 | 1998-09-02 | Murata Mach Ltd | パッケージ搬送システム |
| JP2000140771A (ja) * | 1998-11-10 | 2000-05-23 | Fuji Photo Film Co Ltd | レンズ付きフイルムユニットリサイクルラインの品種毎の仕分け装置 |
| JP2002087532A (ja) * | 2000-09-14 | 2002-03-27 | Denso Corp | 物流管理システム |
| JP2003065974A (ja) * | 2001-08-30 | 2003-03-05 | Shimadzu Corp | 放射線検査装置 |
| JP2006264914A (ja) * | 2005-03-24 | 2006-10-05 | Midori Service Kk | 入荷検品システム |
| JP2007304866A (ja) * | 2006-05-11 | 2007-11-22 | Takenaka Komuten Co Ltd | 情報読取システム、情報読取方法及び情報読取プログラム |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017527873A (ja) * | 2014-06-26 | 2017-09-21 | アマゾン テクノロジーズ インコーポレイテッド | 視覚キューに基づいて自動化タスクを実施すること |
| JP2016037367A (ja) * | 2014-08-08 | 2016-03-22 | 三栄機工株式会社 | 宅配物搬送仕分システム |
| JP2016141541A (ja) * | 2015-02-04 | 2016-08-08 | 株式会社ダイフク | 検品装置 |
| JP2018012059A (ja) * | 2016-07-20 | 2018-01-25 | 株式会社東芝 | 荷物検査システム |
| JP2018016489A (ja) * | 2016-07-29 | 2018-02-01 | パナソニックIpマネジメント株式会社 | 荷物追跡システム及び荷物追跡方法 |
| JP2020056596A (ja) * | 2018-09-28 | 2020-04-09 | 日本電気株式会社 | 荷物引受装置及び荷物引受方法 |
| JP2021066542A (ja) * | 2019-10-18 | 2021-04-30 | 株式会社キッツ | 判定装置、判定方法および判定プログラム |
| JP7388871B2 (ja) | 2019-10-18 | 2023-11-29 | 株式会社キッツ | 判定装置、判定方法および判定プログラム |
| JP2021151925A (ja) * | 2020-04-16 | 2021-09-30 | 株式会社東芝 | 仕分管理装置及び検査システム |
| JP7192037B2 (ja) | 2020-04-16 | 2022-12-19 | 株式会社東芝 | 仕分管理装置及び検査システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100082152A1 (en) | 2010-04-01 |
| WO2010039702A1 (en) | 2010-04-08 |
| CA2738810A1 (en) | 2010-04-08 |
| JP5746033B2 (ja) | 2015-07-08 |
| EP2335200A1 (en) | 2011-06-22 |
| US8489232B2 (en) | 2013-07-16 |
| EP2335200B1 (en) | 2016-01-06 |
| CN102232222B (zh) | 2016-11-02 |
| CA2998389A1 (en) | 2010-04-08 |
| CA2998389C (en) | 2019-02-12 |
| CN102232222A (zh) | 2011-11-02 |
| PL2335200T3 (pl) | 2017-08-31 |
| ES2563464T3 (es) | 2016-03-15 |
| EP2335200A4 (en) | 2012-05-09 |
| CA2738810C (en) | 2019-03-26 |
| US20130188039A1 (en) | 2013-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5746033B2 (ja) | 配送荷物を受け取るシステムおよび方法 | |
| US11494575B2 (en) | Systems and methods for identifying and processing a variety of objects | |
| RU2589387C2 (ru) | Кассовый терминал | |
| CN108700869A (zh) | 用于识别和处理各种物体的感知系统和方法 | |
| US10643038B1 (en) | Multi sensor domain—multi tier camera system for package identification | |
| CN110049933A (zh) | 用于提供车辆中的物体处理的系统和方法 | |
| CN1926581A (zh) | 使用环境传感器用来运输产品的系统 | |
| US20220134543A1 (en) | Systems and methods for sku induction, decanting and automated-eligibility estimation | |
| JP2021086534A (ja) | 計数装置、制御方法、及びプログラム | |
| JP2024523416A (ja) | 複数のコンテナの移動を監視するシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120806 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130822 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130827 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131127 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140220 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140826 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141224 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20150206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150407 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150507 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5746033 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |