JP2012120881A - 電気手術用処置器具 - Google Patents
電気手術用処置器具 Download PDFInfo
- Publication number
- JP2012120881A JP2012120881A JP2012055154A JP2012055154A JP2012120881A JP 2012120881 A JP2012120881 A JP 2012120881A JP 2012055154 A JP2012055154 A JP 2012055154A JP 2012055154 A JP2012055154 A JP 2012055154A JP 2012120881 A JP2012120881 A JP 2012120881A
- Authority
- JP
- Japan
- Prior art keywords
- electrode
- treatment instrument
- distal end
- sheath
- proximal end
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000012212 insulator Substances 0.000 claims abstract description 40
- 230000007423 decrease Effects 0.000 claims description 2
- 210000001519 tissue Anatomy 0.000 description 60
- 238000012986 modification Methods 0.000 description 29
- 230000004048 modification Effects 0.000 description 29
- 238000003780 insertion Methods 0.000 description 14
- 230000037431 insertion Effects 0.000 description 14
- 238000000034 method Methods 0.000 description 13
- 230000033001 locomotion Effects 0.000 description 11
- 208000037062 Polyps Diseases 0.000 description 8
- 230000002093 peripheral effect Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 4
- 230000005611 electricity Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 229910001220 stainless steel Inorganic materials 0.000 description 3
- 239000010935 stainless steel Substances 0.000 description 3
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- 239000011162 core material Substances 0.000 description 2
- 238000002224 dissection Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000010292 electrical insulation Methods 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000011810 insulating material Substances 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 230000009545 invasion Effects 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 210000004872 soft tissue Anatomy 0.000 description 1
Images





























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00595—Cauterization
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/1407—Loop
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/1407—Loop
- A61B2018/141—Snare
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/1417—Ball
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1405—Electrodes having a specific shape
- A61B2018/1422—Hook
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Plasma & Fusion (AREA)
- Medical Informatics (AREA)
- Otolaryngology (AREA)
- Physics & Mathematics (AREA)
- Cardiology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Abstract
【解決手段】遠位端部(11a)と近位端部(11b)とを有するシース(11)と、先端と基端とを有し、前記基端から前記先端に向かう方向が近位端部から遠位端部に向かう方向となるようにシースに挿入され、前記先端において対象部位に対して処置を行う針状電極部(50)と、針状電極部の前記先端に設けられて外部に露出された第一電極(51)と、第一電極よりも前記基端側に離間した位置に第一電極との相対位置関係が固定されて配置された第二電極(52)と、第一電極と第二電極との間に介在されて第一電極と第二電極とを絶縁する絶縁体(53)と、第一電極に高周波電流を通電させる第一導電部と、第二電極に高周波電流を通電させると第二導電部と、を備える。
【選択図】図1
Description
このような電気手術用処置器具は、体腔内に挿入される第一の電極と体表面に配置される第二の電極とが設けられたいわゆるモノポーラ型電気手術用処置器具と、体腔内に配置される第一の電極及び第二の電極が設けられたいわゆるバイポーラ型電気手術用処置器具とに大別される。
この高周波切開具によれば、切開対象の生体組織がスネアによって把持され、その時点で高周波電流を流し生体組織を焼灼できる。
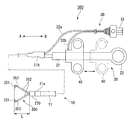
以下、本発明の第1実施形態の電気手術用処置器具について図1から図6を参照して説明する。図1は、本実施形態の電気手術用処置器具1(以下「処置器具1」と称する。)を示す正面図である。なお、同図において符号20で示す側と符号50で示す側とは、縮尺を変えて示されている。また、本明細書では、符号Aで示す方向が遠位端方向、符号Bで示す方向が近位端方向である。
図2Aに示すように、針状電極部50は、外部に露出可能な部分として、遠位端側に位置する第一電極51と、第一電極51に対して近位端側に位置する第二電極52と、第一電極51と第二電極52との間に位置する絶縁体53とを有する。針状電極部50において、第一電極51側が先端側である。
例えば、第一電極51の直径d1は0.5mm以下であることが好ましく、第二電極52の直径d2は0.5mm以上1.0mm以下であることが好ましい。さらに、針状電極部50の先端から基端に向かう軸方向で第一電極51と第二電極52との間の距離であるギャップgは、0.1mm以上0.5mm以下であることが好ましい。
図2Bに示すように、第一電極51には、近位端方向へ延びる導電性のワイヤ54が固定される。ワイヤ54の近位端部54aには、導電性のワイヤ55がさらに固定され、ワイヤ55は近位端側にさらに延びる。また、ワイヤ55の外周面には絶縁性を有する絶縁部58が形成される。
図3に示すように、シース11は、操作部20の遠位端側に固定され、シース11の内部に挿通されたコイルシース12、ワイヤ55は操作部20まで延びる。
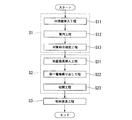
図4は、処置器具1の動作を示すフローチャートである。また、図5Aないし図5Cは処置器具1の使用時の一過程を示す図である。
ステップS1では、まず体腔内に内視鏡を挿入する内視鏡挿入工程であるステップS11が行われる。ステップS11では、体腔内に挿入可能な挿入部及び処置具等を挿通可能な処置具チャンネルを有する内視鏡が、対象部位の種類及び部位等に応じた適宜の手技によって体腔内へ挿入される。体腔内への内視鏡の挿入は、口などの自然開口から内視鏡が挿入される場合や、対象部位に内視鏡を案内するために適宜の部位に小切開が加えられる場合などがある。内視鏡が体腔内に挿入されたら、ステップS11からステップS12へ移行する。
ステップS12では、内視鏡における観察光学系等が用いられて体腔内が観察されるとともに内視鏡の遠位端が対象部位に位置するまで内視鏡が体腔内に挿入されて内視鏡の遠位端が対象部位まで案内される。
ステップS13では、上述の観察光学系等が用いられて対象部位の観察が行われることで対象部位の診断や確認が使用者等によって行われる。
以上でステップS1が終了し、ステップS2へ移行する。
ステップS2では、まず、ステップS21が開始される。ステップS21では、図1に示すハンドル40が指掛け部22に近接するように近位端側に引き寄せられる。すると、図2Bに示すワイヤ55は、近位端側に牽引され、針状電極部50はシース11の内部に格納される。さらに、上述の内視鏡の鉗子チャンネルに、処置器具1のシース11が遠位端部11a側から挿通され、遠位端部11aが挿入部の遠位端から繰り出される。これでステップS21は終了し、ステップS22へ移行する。
ステップS22では、図1に示すハンドル40が本体21の遠位端側に押出され、シース11の遠位端部11aから針状電極部50が繰り出される。すると、第一電極51は、遠位端がシース11の遠位端部11aから上述の長さLだけ繰り出されたところで停止する。このとき、図2Bに示すように、第二電極52のフランジ部52aと接点部材13の段部13aとが接触する。そして、ハンドル40を押し出す力によってフランジ部52aと段部13aとが押圧固定される。すると、第二電極52と接点部材13とが導通することで第二電極52と電源線32bとの間が導通し、高周波電流を通電させる第二導電部が生じる。これでステップS22は終了し、ステップS23へ移行する。
ステップS23では、図5Aに示すように針状電極部50の第一電極51と第二電極52とが対象部位Tに接触する。このとき、対象部位Tが例えば軟組織である場合には第一電極51と第二電極52とのそれぞれの外面は対象部位Tに対して密着する。また、本実施形態では、第一電極51が対象部位Tと接触する部分の面積は、第二電極52が対象部位Tに接触する部分の面積よりも狭い。そのため、対象部位Tにおいて生体組織が切開される位置は第一電極51側である。
以下では、本実施形態の処置器具1の変形例1について図6を参照して説明する。
図6は、本変形例の電気手術用処置器具の一部の構成を示す断面図である。
図6に示すように、本変形例では、処置器具1は、第二電極52に代えて第二電極52aを備える。そして、第二電極52aの外周面には絶縁性を有する第二絶縁体59が設けられている。
絶縁体53と第二絶縁体59との間で外部に露出された第二電極52aの表面積は、絶縁体53より遠位端で外部に露出された第一電極51の表面積と等しいことが好ましい。
以下では、本実施形態の処置器具1の変形例2について図7Aないし図8Dを参照して説明する。
本変形例では、処置器具1における処置部の他の構成例について説明する。
図7A及び図7Bに示すように、本構成例における処置部は、針状電極部50に代えて設けられた屈曲電極部150である。
屈曲電極部150は、上述の第一電極51に代えてフック型電極151を有する。フック型電極151は、第二電極52に対する第一電極である点は上述の第一電極51と同様である。
また、フック型電極151では、シース11の遠位端とフック型電極151の遠位端との間の距離は上述の針状電極部50と同様に長さLまでに制限される。
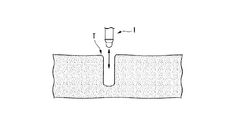
また、屈曲部151bの端部151cが生体組織に埋没する向きにフック型電極151を対象部位Tに接触させる場合には、上述の第一電極51よりも深い位置で対象部位Tの生体組織を切開できる。
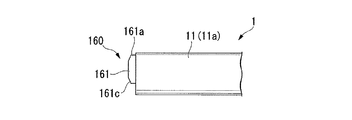
図8A及び図8Bに示すように、本構成例では、処置器具1は、処置部として針状電極部50に代えて三角電極部160を備える。
以下では、本実施形態の処置器具1の変形例3について図9を参照して説明する。図9A及び図9Bは、本変形例の処置器具1の一部の構成を示す断面図である。
図9A及び図9Bに示すように、本変形例では、シース11の遠位端部11aの内部に、シース11の軸方向に沿って伸縮動作する付勢部材60が設けられる。付勢部材60においてシース11の遠位端側に位置する端部60aは、接点部材13に接触する。また、付勢部材60においてシース11の近位端側に位置する端部60bは、フランジ部52aに接触する。
このとき、シース11の遠位端部11aから針状電極部50が突出する長さが図1に示す長さLよりも短くなった場合には、フランジ部52aと接点部材13とはシース11の軸方向に離間する。しかしながら、シース11の軸方向に付勢部材60が伸長するように付勢部材60が弾性変形することによって、接点部材13とフランジ部52aとのそれぞれと付勢部材60との間における高周波電流の導通状態は維持される。
次に、本発明の第2実施形態の電気手術用処置器具について説明する。なお、以下に説明する各実施形態において、上述した第1実施形態に係る電気手術用処置器具と構成を共通とする箇所には同一符号を付けて、説明を省略する。
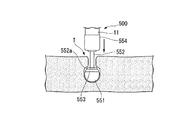
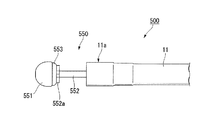
絶縁体558は、拡大受動電極554よりも遠位端側に突出して設けられる。このため、絶縁体558と延出部551aとが接触する位置関係では絶縁体558と拡大受動電極554とは接触しない。
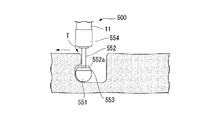
図12Aないし図12Cは、処置器具500の使用時の動作を説明するための動作説明図である。
まず、図12Aに示すように、周知の高周波切開器具や上述の第1実施形態で説明した処置器具1などを使用して、切開の起点となる小切開が対象部位Tに加えられる。
次に、本発明の第3実施形態の電気手術用処置器具について図14から図17を参照して説明する。なお、以下に説明する各実施形態において、上述した第1実施形態に係る電気手術用処置器具と構成を共通とする箇所には同一符号を付けて、説明を省略する。
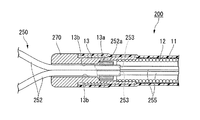
図14に示すように、本実施形態の電気手術用処置器具200(以下「処置器具200」と称する。)は、針状電極部50に代えてスネアループ250を備え、第二電極52に加えてシース11の遠位端部11aの外表面の側に設けられた拡大第二電極270をさらに備える点で第1実施形態の処置器具1と構成が異なる。
第一電極251の大きさは、ワイヤ255と絶縁体253との位置関係によって適宜の大きさに設定される。第一電極251の大きさは、例えば、ポリープP(図16参照)の茎部などの対象部位Tに掛け回すことが可能な長さを有するワイヤ255の外表面が露出されるように、対象部位Tに応じて設定されていることが好ましい。
図15に示すように、スネアループ250のワイヤ255は、シース11の内部を通って近位端側に延びる。ワイヤ255の近位端側の端部は、上述の第1実施形態の処置器具1と同様に、ハンドル40及び電源線32bに固定される(図14及び図3参照)。
また、第二電極252における基端側の一部には、ワイヤ255が折り返された二本のワイヤ255を束ねる固定管252aが固定される。固定管252aは導電性を有する。
固定管252aは、第1実施形態のフランジ部52aと同様に、接点部材13に接触することで導通する部材である。
処置器具200において、第二電極252と拡大第二電極270とは導通している。そのため、第二電極252と拡大第二電極270とはともに第一電極251に対する受動電極として機能する。
処置器具200の使用時には、上述の処置器具1と同様に、図3に示すステップS1及びステップS21が行われる。
ステップS21に続いて行われるステップS22では、図14に示すように、使用者がハンドル40を本体21に対して遠位端側に移動させることで、シース11の遠位端部11aからスネアループ250が繰り出される。すると、スネアループ250は、ワイヤ255の弾性によって拡開し、環状になる。
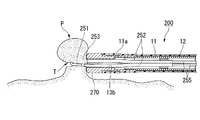
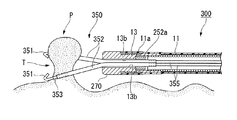
ステップS23では、図16及び図17に示すようにスネアループ250はポリープPの茎部(本実施形態における対象部位T)に使用者の操作によって掛け回される。続いて、使用者がハンドル40を本体21に対して近位端側に移動させる。すると、ポリープPに掛け回されたスネアループ250はシース11の内部に移動し、スネアループ250の遠位端側の部分にある第一電極251によって対象部位Tが引き絞られる。このとき、拡大第二電極270はポリープPに押し付けられる。
続いて、使用者の操作によって高周波電流が第一電極251と第二電極252との間で通電される。これにより、対象部位Tは切開されてポリープPは切除される。
次に、本発明の第4実施形態の電気手術用処置器具について図19から図23Bを参照して説明する。
図19は、本実施形態の電気手術用処置器具を示す正面図である。
図19に示すように、本実施形態の電気手術用処置器具300(以下「処置器具300」と称する。)には、針状電極部50に代えて二脚型切開部350が設けられる。
二脚型切開部350は、近位端から遠位端に向かう軸線方向に向かうとともにシース11の径方向外方に向かうように傾斜して形成された一対の弾性把持部351を有する。
図20に示すように、それぞれの弾性把持部351は、第2実施形態に示したワイヤ255と同様に、高周波電流を通電可能で弾性を有するワイヤ355の遠位端側の端部近傍の領域で、遠位端において互いに近接する方向に端部が折り曲げられた形状に形成された掛止部351aを有する。
また、弾性把持部351の近位端側には、弾性把持部351との相対位置関係が固定され、ワイヤ355を被覆するように設けられた第二電極352と、弾性把持部351と第二電極352との間に介在し、ワイヤ355を被覆するように固定された絶縁体353とが設けられる。なお、本実施形態では、弾性把持部351は第二電極352に対する第一電極である。
第二電極352における近位端部分は、第3実施形態の処置器具200と同様に、固定筒252aによって束ねられて固定される。また、処置器具300は処置器具200と同様の拡大第二電極270を有する。
図21に示すように、処置器具300の使用時において、シース11の遠位端部11aから二脚型切開部350が繰り出されているときには、弾性把持部351のそれぞれは、ワイヤ355の弾性によって互いに離間するように位置している。この状態で、使用者の操作によって、一対の弾性把持部351の間に対象部位Tが位置するように二脚型切開部350の位置が調整される。
すると、弾性把持部351と第二電極352との間で対象部位Tに位置する生体組織が焼灼切開され、ポリープPが切除される。
また、図23Bに示すように、処置器具300は、上述の付勢部材60と上述の第二受動電極270とを備えてもよい。
次に、本発明の第4実施形態の電気手術用処置器具について図24ないし図26を参照して説明する。
図24は、本実施形態の電気手術用処置器具を示す正面図である。図24に示すように、本実施形態の電気手術用処置器具400(以下「処置器具400」と称する。)は、針状電極部50に代えて針状電極部450を備え、針状電極部450は、第二電極52に加えてシース11の遠位端部11aの外表面の側に設けられた拡大第二電極452をさらに備えている点で第1実施形態の処置器具1と構成が異なる。
処置器具400において、第二電極52と拡大第二電極452とは導通しているので、第二電極52と拡大第二電極452とは第一電極51に対する受動電極として機能する。
また、上述の実施形態及び変形例で説明した構成は、適宜組み合わせて採用することができる。
10 挿入部
11 シース
12 コイルシース(第二導電部)
13 接点部材(第二導電部)
20 操作部
50 針状電極部(処置部)
51、251、551 第一電極
52、252、352、552 第二電極
53、253、353、553 絶縁体
54、55、255、355 ワイヤ(第一導電部)
59 第二絶縁体
250 スネアループ
270 拡大受動電極
351 弾性把持部(第一電極)
452 拡大第二電極
Claims (7)
- 遠位端と近位端とを有するシースと、
先端と基端とを有し、前記基端から前記先端に向かう方向が前記近位端から前記遠位端に向かう方向となるように前記シースに挿入され、前記先端の側の少なくとも一部において対象部位に対して処置を行う処置部と、
前記処置部の前記先端に設けられて外部に露出された第一電極と、
前記処置部における前記第一電極よりも前記基端側に離間した位置に前記第一電極との相対位置関係が固定されて配置された第二電極と、
前記第二電極と電気的に接続され前記シースの遠位端の外面に配された受動電極と、
前記第一電極と前記第二電極との間に介在されて前記第一電極と前記第二電極とを絶縁する絶縁体と、
前記第一電極に高周波電流を通電させる第一導電部と、
前記第二電極に高周波電流を通電させる第二導電部と、
を備えることを特徴とする電気手術用処置器具。 - 前記第一電極は、前記第二電極の外径以上に前記処置部の径方向外側に膨出して形成されている請求項1に記載の電気手術用処置器具。
- 前記第一電極は、近位端から遠位端に向かうに従って縮径する半球状に形成されている請求項1に記載の電気手術用処置器具。
- 前記シースは電気伝導性のコイルシースを内部に有し、
前記コイルシースが前記第二導電部の一部として機能する請求項1に記載の電気手術用処置器具。 - 前記第二電極の前記先端側の一部を前記第一電極の表面積と略等しい面積で露出させるように前記第二電極の外面の少なくとも一部を隠す第二絶縁体をさらに備える請求項1に記載の電気手術用処置器具。
- 前記第一電極は、電気伝導性を有する環状のスネアループの一部である請求項1に記載の電気手術用処置器具。
- 前記第一電極は、前記基端から前記先端方向に延び前記基端を開閉の中心として開閉動作可能な一対の弾性把持部を有する二脚鉗子である請求項1に記載の電気手術用処置器具。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012055154A JP5690297B2 (ja) | 2010-01-29 | 2012-03-12 | 電気手術用処置器具 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010018130 | 2010-01-29 | ||
| JP2010018130 | 2010-01-29 | ||
| JP2012055154A JP5690297B2 (ja) | 2010-01-29 | 2012-03-12 | 電気手術用処置器具 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011532370A Division JP5037727B2 (ja) | 2010-01-29 | 2010-12-08 | 電気手術用処置器具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012120881A true JP2012120881A (ja) | 2012-06-28 |
| JP5690297B2 JP5690297B2 (ja) | 2015-03-25 |
Family
ID=44318947
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011532370A Active JP5037727B2 (ja) | 2010-01-29 | 2010-12-08 | 電気手術用処置器具 |
| JP2012055154A Active JP5690297B2 (ja) | 2010-01-29 | 2012-03-12 | 電気手術用処置器具 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011532370A Active JP5037727B2 (ja) | 2010-01-29 | 2010-12-08 | 電気手術用処置器具 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8702701B2 (ja) |
| EP (1) | EP2476389B1 (ja) |
| JP (2) | JP5037727B2 (ja) |
| CN (1) | CN102573685B (ja) |
| WO (1) | WO2011092946A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014038547A1 (ja) * | 2012-09-10 | 2014-03-13 | オリンパスメディカルシステムズ株式会社 | 内視鏡処置具 |
| JP2015006342A (ja) * | 2013-06-24 | 2015-01-15 | ジャイラス メディカル リミテッド | 電気外科用器具 |
| US9168095B2 (en) | 2012-06-26 | 2015-10-27 | Taewoong Medical Co., Ltd | High-frequency treatment device |
| JP2016537129A (ja) * | 2013-11-21 | 2016-12-01 | エシコン・エンド−サージェリィ・エルエルシーEthicon Endo−Surgery, LLC | 電気手術特徴を有する超音波外科用器具 |
| WO2019017082A1 (ja) * | 2017-07-19 | 2019-01-24 | 株式会社カネカ | 内視鏡用高周波処置具 |
| JPWO2018189949A1 (ja) * | 2017-04-12 | 2020-02-20 | 株式会社カネカ | 内視鏡用高周波処置具 |
| JP7579885B2 (ja) | 2020-05-06 | 2024-11-08 | 安進医療科技(北京)有限公司 | 内視鏡手術用電極アセンブリ |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012060189A1 (ja) * | 2010-11-01 | 2012-05-10 | オリンパスメディカルシステムズ株式会社 | 処置具 |
| GB2508905A (en) * | 2012-12-14 | 2014-06-18 | Gyrus Medical Ltd | Endoscopic instrument with bypass lead |
| FR3033244A1 (fr) * | 2015-03-04 | 2016-09-09 | Jean Chaignaud | Anse bipolaire pour chirurgie endoscopique |
| KR102668073B1 (ko) * | 2016-01-13 | 2024-05-23 | 가부시키가이샤 가네카 | 내시경용 고주파 처치구 |
| CN106214247B (zh) * | 2016-07-04 | 2018-08-14 | 南京微创医学科技股份有限公司 | 一种双极高频电刀 |
| US10980402B2 (en) * | 2019-04-03 | 2021-04-20 | Olympus Corporation | Diathermic endotherapeutic device |
| WO2021124383A1 (ja) * | 2019-12-16 | 2021-06-24 | オリンパス株式会社 | 高周波処置具、医用システムおよび高周波処置具の作動方法 |
| CN112807079B (zh) * | 2021-03-03 | 2025-01-21 | 邦士医疗科技股份有限公司 | 脊柱用可伸缩手术刀以及手术刀刀头 |
| KR102621839B1 (ko) * | 2021-08-27 | 2024-01-09 | 주식회사 바이오유닛 | 조립이 용이한 바이폴라 전극 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002224135A (ja) * | 2001-01-30 | 2002-08-13 | Nippon Zeon Co Ltd | バイポーラ型電気処置器具 |
| JP2005144142A (ja) * | 2003-11-19 | 2005-06-09 | Jon C Garito | 組織治療用電気外科手術用電極 |
| JP2007535972A (ja) * | 2004-02-17 | 2007-12-13 | ボストン サイエンティフィック リミティド | 内視鏡複数内孔装置及び関連する使用方法 |
| JP2010505552A (ja) * | 2006-10-05 | 2010-02-25 | スピネイカー メディカル エルエルシー | 電気外科的装置 |
| JP2010528804A (ja) * | 2007-06-14 | 2010-08-26 | マッシモ・グリマルディ | 双極高周波を使用する心臓不整脈の経皮経カテーテルアブレーション用のカテーテル |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3986212A (en) | 1975-04-11 | 1976-10-19 | Glasrock Products, Inc. | Composite prosthetic device with porous polymeric coating |
| JPS5552748A (en) | 1978-10-12 | 1980-04-17 | Olympus Optical Co | Highhfrequency incising tool |
| US5843019A (en) * | 1992-01-07 | 1998-12-01 | Arthrocare Corporation | Shaped electrodes and methods for electrosurgical cutting and ablation |
| US5902272A (en) * | 1992-01-07 | 1999-05-11 | Arthrocare Corporation | Planar ablation probe and method for electrosurgical cutting and ablation |
| US6837888B2 (en) * | 1995-06-07 | 2005-01-04 | Arthrocare Corporation | Electrosurgical probe with movable return electrode and methods related thereto |
| JPH09140723A (ja) * | 1995-11-22 | 1997-06-03 | Olympus Optical Co Ltd | 高周波治療器 |
| US6221039B1 (en) * | 1998-10-26 | 2001-04-24 | Scimed Life Systems, Inc. | Multi-function surgical instrument |
| US6325797B1 (en) * | 1999-04-05 | 2001-12-04 | Medtronic, Inc. | Ablation catheter and method for isolating a pulmonary vein |
| JP4109092B2 (ja) * | 2002-11-21 | 2008-06-25 | オリンパス株式会社 | 高周波ナイフ |
| DE60314184T2 (de) * | 2003-01-09 | 2008-01-24 | Gyrus Medical Ltd., St. Mellons | Elektrochirurgischer generator |
| JP2006280862A (ja) * | 2005-03-31 | 2006-10-19 | Kenji Sawada | 傘カバー |
| JP4345703B2 (ja) * | 2005-03-31 | 2009-10-14 | 日本ゼオン株式会社 | 電気処置器具 |
| JP2009112788A (ja) * | 2007-10-17 | 2009-05-28 | Takashi Toyonaga | 高周波処置具 |
| JP2009254650A (ja) * | 2008-04-18 | 2009-11-05 | Fujinon Corp | 高周波処置具 |
-
2010
- 2010-12-08 JP JP2011532370A patent/JP5037727B2/ja active Active
- 2010-12-08 EP EP10844700.4A patent/EP2476389B1/en not_active Not-in-force
- 2010-12-08 CN CN201080046869.XA patent/CN102573685B/zh active Active
- 2010-12-08 WO PCT/JP2010/071985 patent/WO2011092946A1/ja active Application Filing
-
2012
- 2012-03-01 US US13/409,434 patent/US8702701B2/en active Active
- 2012-03-12 JP JP2012055154A patent/JP5690297B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002224135A (ja) * | 2001-01-30 | 2002-08-13 | Nippon Zeon Co Ltd | バイポーラ型電気処置器具 |
| JP2005144142A (ja) * | 2003-11-19 | 2005-06-09 | Jon C Garito | 組織治療用電気外科手術用電極 |
| JP2007535972A (ja) * | 2004-02-17 | 2007-12-13 | ボストン サイエンティフィック リミティド | 内視鏡複数内孔装置及び関連する使用方法 |
| JP2010505552A (ja) * | 2006-10-05 | 2010-02-25 | スピネイカー メディカル エルエルシー | 電気外科的装置 |
| JP2010528804A (ja) * | 2007-06-14 | 2010-08-26 | マッシモ・グリマルディ | 双極高周波を使用する心臓不整脈の経皮経カテーテルアブレーション用のカテーテル |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9168095B2 (en) | 2012-06-26 | 2015-10-27 | Taewoong Medical Co., Ltd | High-frequency treatment device |
| JP5555391B1 (ja) * | 2012-09-10 | 2014-07-23 | オリンパスメディカルシステムズ株式会社 | 内視鏡処置具 |
| US9237918B2 (en) | 2012-09-10 | 2016-01-19 | Olympus Corporation | Endoscope treatment tool |
| WO2014038547A1 (ja) * | 2012-09-10 | 2014-03-13 | オリンパスメディカルシステムズ株式会社 | 内視鏡処置具 |
| JP2015006342A (ja) * | 2013-06-24 | 2015-01-15 | ジャイラス メディカル リミテッド | 電気外科用器具 |
| JP2016537129A (ja) * | 2013-11-21 | 2016-12-01 | エシコン・エンド−サージェリィ・エルエルシーEthicon Endo−Surgery, LLC | 電気手術特徴を有する超音波外科用器具 |
| US11432868B2 (en) | 2013-11-21 | 2022-09-06 | Cilag Gmbh International | Ultrasonic surgical instrument with electrosurgical feature |
| JPWO2018189949A1 (ja) * | 2017-04-12 | 2020-02-20 | 株式会社カネカ | 内視鏡用高周波処置具 |
| WO2019017082A1 (ja) * | 2017-07-19 | 2019-01-24 | 株式会社カネカ | 内視鏡用高周波処置具 |
| JPWO2019017082A1 (ja) * | 2017-07-19 | 2020-05-28 | 株式会社カネカ | 内視鏡用高周波処置具 |
| JP7029454B2 (ja) | 2017-07-19 | 2022-03-03 | 株式会社カネカ | 内視鏡用高周波処置具 |
| CN110536652A (zh) * | 2017-07-19 | 2019-12-03 | 株式会社钟化 | 内窥镜用高频处置仪 |
| CN110536652B (zh) * | 2017-07-19 | 2022-09-06 | 株式会社钟化 | 内窥镜用高频处置仪 |
| JP7579885B2 (ja) | 2020-05-06 | 2024-11-08 | 安進医療科技(北京)有限公司 | 内視鏡手術用電極アセンブリ |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102573685B (zh) | 2015-04-01 |
| EP2476389B1 (en) | 2016-06-15 |
| CN102573685A (zh) | 2012-07-11 |
| WO2011092946A1 (ja) | 2011-08-04 |
| JPWO2011092946A1 (ja) | 2013-05-30 |
| JP5037727B2 (ja) | 2012-10-03 |
| US20120220993A1 (en) | 2012-08-30 |
| JP5690297B2 (ja) | 2015-03-25 |
| EP2476389A4 (en) | 2013-11-06 |
| US8702701B2 (en) | 2014-04-22 |
| EP2476389A1 (en) | 2012-07-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5690297B2 (ja) | 電気手術用処置器具 | |
| US8795273B2 (en) | Treatment tool for endoscope | |
| US7731714B2 (en) | Instrument for endoscope and instrument system for endoscope | |
| JP2004167081A (ja) | 高周波ナイフ | |
| JPWO2010090089A1 (ja) | 処置具 | |
| JP2019500955A (ja) | 眼内手術用の顕微外科用ジアテルミーマイクログリップ鉗子ならびにジアテルミー切断装置 | |
| WO2017122546A1 (ja) | 内視鏡用高周波処置具 | |
| EP1847231B1 (en) | Soft bipolar forceps | |
| US8945123B2 (en) | High-frequency treatment tool | |
| JP7267539B2 (ja) | 内視鏡用マイクロ波照射器具 | |
| JP2021122508A (ja) | 内視鏡用針状メス | |
| JP2000139944A (ja) | 高周波処置具 | |
| JP2020163001A (ja) | 内視鏡用マイクロ波照射器具 | |
| JP6944996B2 (ja) | 内視鏡用高周波処置具 | |
| US20240216047A1 (en) | Methods, systems, and apparatuses for perforating tissue structures | |
| JP2024139520A (ja) | 内視鏡用高周波処置具 | |
| JP7286067B2 (ja) | 内視鏡用マイクロ波照射器具 | |
| JP7029454B2 (ja) | 内視鏡用高周波処置具 | |
| JP2022169939A (ja) | 内視鏡用針状メス | |
| JP2023133880A (ja) | 内視鏡用高周波処置具 | |
| CN113613575A (zh) | 内窥镜用处置器具 | |
| WO2018062369A1 (ja) | 組織接合器 | |
| JP2020163000A (ja) | 内視鏡用マイクロ波照射器具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131108 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140627 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140722 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140919 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20140922 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150120 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150130 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5690297 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |