JP2012055041A - ベクトル制御装置、及び電動機制御システム - Google Patents
ベクトル制御装置、及び電動機制御システム Download PDFInfo
- Publication number
- JP2012055041A JP2012055041A JP2010193969A JP2010193969A JP2012055041A JP 2012055041 A JP2012055041 A JP 2012055041A JP 2010193969 A JP2010193969 A JP 2010193969A JP 2010193969 A JP2010193969 A JP 2010193969A JP 2012055041 A JP2012055041 A JP 2012055041A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- phase
- excitation
- motor
- deviation amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/04—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation specially adapted for very low speeds
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/24—Vector control not involving the use of rotor position or rotor speed sensors
- H02P21/26—Rotor flux based control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
- H02P6/183—Circuit arrangements for detecting position without separate position detecting elements using an injected high frequency signal
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2203/00—Indexing scheme relating to controlling arrangements characterised by the means for detecting the position of the rotor
- H02P2203/11—Determination or estimation of the rotor position or other motor parameters based on the analysis of high-frequency signals
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
【解決手段】電動機電流の周波数とは異なる周波数の交番電圧を励磁軸電圧の成分、及びトルク軸電圧の成分に分解して重畳する交番電圧発生手段6と、交番電圧により電動機電流に発生する高周波電流の位相(arctan(ΔIqc/ΔIdc)、又はarctan(ΔIbc/ΔIac)))から重畳軸の位相を減算することにより、高周波電流と交番電圧Vdh*,Vqh*との位相差を演算する高周波電流位相差演算手段7と、高周波電流位相差演算手段が演算した位相差が零又となるように、重畳軸の位相方向を調整する重畳軸調整手段8と、重畳軸調整手段が方向を調整した重畳軸と励磁軸との間の軸偏差量を演算する軸偏差量演算手段9と、軸偏差量が零になるように、励磁軸の位相方向を調整する励磁軸調整手段10とを備える。
【選択図】図1
Description
高性能を求められる電動機駆動用電力変換装置は、電動機の回転子位置や回転速度など、回転子の制御情報を精度よく検出する必要がある。近年の電力変換装置は、位置センサや速度検出器などを電動機に取りつけて、実際に回転角を測定することなく、電動機に発生する逆起電圧情報から、高精度な制御量推定を行う方法を使用している。しかし、逆起電圧情報から制御量推定を行う方法は、極低速付近では逆起電圧が絶対的に小さくなることから、適用が困難である。
そこで、低速での制御量推定方法として、電動機の突極性又は磁束飽和特性を利用する方法がある。
特許文献1の技術は、特に、永久磁石同期電動機の突極性を利用して、磁極位置の推定を行うものである。この技術は、電動機の励磁軸(dc軸)に交番磁界を発生させ、このdc軸に対して直交する推定トルク軸(qc軸)成分の脈動電流(あるいは電圧)を検出し、これに基づいて電動機内部の磁極位置を推定演算する。この技術は、実際の磁極軸と推定磁極軸との間に誤差がある場合に、dc軸からqc軸に対してインダクタンスの干渉項が存在する特徴を利用している。
この技術は、高周波電圧あるいは電流を電動機に重畳することで発生する高周波電流あるいは電圧の変動分を検出してインダクタンスを逐次計測し、制御量として二次磁束の位相を推定するものである。
特許文献2の技術は、電動機の磁気飽和特性を利用して磁極位置を推定演算するものであり、電動機に対して、ある方向へ電圧を印加したことで発生する電流の大きさに基いて、磁極位置を推定演算する。
これらの技術は、センサを用いることなく電動機の運転情報を精度良く推定することができるため、センサ及びケーブルのコストや設置の手間を削減することができる。更には、センサの組み付け誤差や環境に起因するノイズ,故障などによる電動機駆動の不適切な挙動を抑制することができる。
しかし、ブレーキや衝撃外乱による急激な(過渡的な)軸偏差量Δθの増大が発生すると、sinΔθ=Δθの近似が成立しなくなる。この場合、軸偏差量Δθが増大しているのにもかかわらず、高周波重畳による軸偏差量Δθの推定量は減少するように観測されるため、推定誤差が増大し、応答が設計値より小さくなったり、遂には脱調するという問題が発生する。
また、特許文献2の技術は、インダクタンスの飽和特性を利用して位相偏差(軸偏差量Δθ)を推定する方式である。しかし、高周波重畳によって得られるインダクタンスの飽和特性は非線形特性であり,突極性の場合のように正弦波などの関数でモデル化することも困難である。このため、過渡的な軸誤差は正確に推定することができず、同様の問題が発生する。
前記電動機電流の周波数とは異なる周波数の交番電圧を前記励磁軸電圧の成分、及び前記トルク軸電圧の成分に分解して重畳する交番電圧重畳手段(6)と、前記交番電圧の基準位相を重畳軸(p軸)とし、前記交番電圧により発生する高周波電流を励磁軸成分(ΔIdc)及びこの励磁軸に直交する電流成分(ΔIqc)と分解し、励磁軸から見た前記高周波電流の位相(arctan(ΔIqc/ΔIdc)、又はarctan(ΔIbc/ΔIac)))から前記重畳軸及び励磁軸の間の位相差(θpdc又はθp)を減算することにより、前記交番電圧により前記電動機電流に発生する高周波電流と前記交番電圧との位相差(θivh)を演算する高周波電流位相差演算手段(7)と、前記高周波電流位相差演算手段が演算した位相差(θivh)が零又は所定の目標値となるように、前記重畳軸の位相方向(θp)を調整する重畳軸調整手段(8)と、前記重畳軸調整手段が方向を調整した前記重畳軸(p軸)と前記励磁軸(dc軸)との間の軸偏差量(Δθc)を演算する軸偏差量演算手段(9)と、前記軸偏差量(Δθc)が零又は所定の目標値になるように、前記励磁軸(dc軸)の位相方向を調整する励磁軸調整手段(10)とを備えることを特徴とする。なお、( )内の文字・符号は例示である。
以下、本発明の実施形態を図面を用いながら詳細に説明する。
図1は、本発明の第1実施形態の電動機制御システムの構成図であり、図2は、電動機制御において使用される座標系と記号の定義を示す図である。
電流検出手段2は、電動機1に流れる三相電流Iu,Iv,Iwを検出し、三相電流信号Iuc,Ivc,Iwcを出力する。電力変換器11は、電動機制御装置40が生成した三相指令電圧Vu,Vv,Vwに基づいて、直流電源Eの直流電力を三相交流電力に変換して、三相交流電力を電動機1に供給する。
電動機1は、三相の同期電動機であり、図示しないが、複数の永久磁石が貼付された回転子が固定子の内部を回転するように構成されている。
dq座標系において、電動機の電圧Vd,Vq,電流Id,Iq,磁束φd,φqは、(数1)で表わされる。

また、磁気飽和等の非線形現象を無視すれば、磁束φd,φqと電流Id,Iqとの関係は(数2)のように表される。インダクタンスLd,Lqは、d軸方向,q軸方向の2相換算値であり、前記の突極性は、両者の値が異なっていることを表す。
(数1)及びこれ以降の数式において、sは微分演算子を示し、ωは回転子の回転速度を示し、rは一次抵抗値を示す。ここでは、高周波領域を考慮するため、抵抗による電圧降下を十分無視できるとし、更に回転速度ωも十分低速と仮定すると、(数3)が得られる。
(数3)の演算子Δは、高周波重畳による変分を表す。(数2)も高周波重畳による変分のみを考慮すれば、(数4)のように表現することができる。
(数3),(数4)から、高周波電圧を与えた場合に発生する高周波電流を(数5)のように導くことができる。
添え字p,zはpz座標に変換された値であることを示す。また、θpdはd軸から見たp軸の位相を示している。記号中のR(・)は(数7)で表わされる回転行列を示す。
(数8)から、電動機1に突極性がある場合(Ld≠Lq)であって、p軸とd軸とが一致(同期)しているとき(θpd=0)、高周波電流はp軸上にあり、同期が外れると、高周波電流はp軸からずれるという性質があることが分かる。
したがって、重畳している交番電圧の位相と、発生する高周波電流の位相との差を観測することにより、p軸とd軸との間の軸誤差情報を推定することができる。
また、重畳している交番電圧の位相と、これにより発生する高周波電流の位相とが一致するように制御すれば、p軸とd軸とが一致することが判る。
以下、本実施形態で最も特徴的である重畳位相調整手段8と、それに伴う励磁位相調整手段10とについて説明する。
(数9)の演算により、重畳交番電圧と高周波電流との位相差θivhを得ることができる。応答調整ゲイン43は、位相差θivhに適当な応答調整ゲインをかけ、軸誤差基準量Xθpdとして出力する。なお、通常Ld<Lqの場合、θpdcとθivhは符号が反転しており、正のθpdcに対して負のθivhが得られる。よって応答調整ゲイン43を負の値にしてθpdcとXθpdの符号を合わせる。
重畳位相調整手段8は、目標値生成器8aと、加算器8bと、PI制御器8cと、積分器8d、反転器8eとを備え、軸誤差基準量Xθpdを目標値Xθpd0と一致させるべくp軸位相を操作する。本実施形態では、重畳位相調整手段8は、この機能をPI制御により実装した。目標値Xθpd0は通常ゼロでよい。加算器8bは、軸誤差基準量演算手段7(図4)が出力したXθpdの値と、目標値生成器8aが出力した目標値Xθpd0との偏差を演算する。図2の軸誤差基準量の定義から、加算器8bが出力した偏差が正のときは重畳位相は負に動く必要があるため、反転器8eで偏差を反転させる。PI制御器8cは、反転器8eが出力した偏差に(Kp+KI/s)を乗算する。積分器8dは、PI制御器8cが演算した演算結果を積分し、P軸位相θPを出力する。
軸偏差量演算手段9は、この原理に基づいて、d軸とdc軸との位相差である軸偏差量Δθcを計算する。軸偏差量演算手段9は、減算器9aと、反転器9bと、低域通過フィルタ(LPF)9cとを備え、減算器9aがp軸位相θpからdc軸位相θdcを減じ、θpdcの信号を出力する。また、反転器9bは、θpdcの信号を反転し、低域通過フィルタ9cを介して、Δθcの信号を出力する。すなわち、単純にΔθc=−θpdcとなっている。
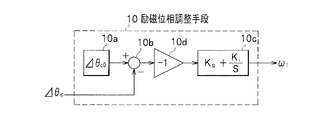
励磁位相調整手段10は、目標値生成器10aと、減算器10bと、PI制御器10cと反転器10dとを備え、軸偏差量Δθcを目標値Δθc0に一致させるべく、出力周波数ω1を出力する。この出力周波数ω1が積分器(図1)により積分されることにより、励磁位相調整手段10は、dc軸位相θdcを操作する。減算器10bは、目標値生成器10aが生成した目標値Δθc0から軸偏差量Δθcを減算し、反転器10dが励磁位相調整手段の動作方向を考慮して減算器10b出力の偏差を反転させる。PI制御器10cは、反転器10eの出力を比例積分演算する。目標値Δθc0は通常ゼロでよい。
図8は、本実施形態で定義した軸誤差基準量Xθpdとpd間の軸誤差θpdとの関係を示している。インダクタンスの突極性を利用する高周波重畳方式では、軸誤差θpdの情報は(数6)に示すように、sinθpd,cosθpdのように三角関数で表現される。そのため、図8のように軸誤差基準量Xθpdは正弦波状の特性を有する。そのため、θpdが大きくなるとpd間軸誤差の正しい検出ができなくなる。
電動機制御システム100bは、電動機制御システム100a(図1)に対して、重畳位相調整手段8、及び軸偏差量演算手段9が無く、軸誤差基準量演算手段7の出力信号XθpdがΔθcとして直接励磁位相調整手段10に入力されている。
また、電動機制御システム100bは、交番電圧発生手段6に入力される信号θpdcはゼロであり、そのゼロの値が軸誤差基準量演算手段7に入力される。
従来、多くの場合高周波電圧は、dc軸に重畳されていた(θpdc=0)。この場合、p軸とdc軸は一致するため、θpd=Δθcとなり、軸誤差基準量演算手段の出力Xθpdは直接励磁位相調整手段10に入力されることになる。
なお、本実施形態では、励磁位相調整手段10としてPI制御を実装したが、オブザーバによる実装を行うこともできる。
図10は、本発明の第2実施形態の電動機制御システムの構成図である。
本実施形態の電動機制御システム100cは、図1の構成に対し、電動機1の誘起電圧に基いて軸偏差量Δθ(=θpd)を推定する第2の軸偏差量演算手段101が追加されており、励磁位相調整手段10が軸偏差量として軸偏差量演算手段9と第2の軸偏差量演算手段101との何れかを選択する切り替え機能を付与した励磁位相切替調整手段102に変更されている。切替後の軸偏差量をΔθhとしたので、軸偏差量演算手段9の出力信号の記号をΔθhに変更している。第2の軸偏差量演算手段101は,電動機の特性パラメータを用いて(数10)で軸偏差量Δθemfを推定する。
(数10)において、ω1は出力周波数であり、θdcの微分値である。第2の軸偏差量演算手段101は、高周波電圧の重畳を必要としないが、誘起電圧が小さくなる極低速の運転条件では、軸偏差量の満足な推定ができなくなる。一方、第1実施形態の制御方法は、停止時から低速でも適用できるが、高周波電圧重畳による高周波電流によって、騒音が発生する可能性があり、また、ハードウェアの電流限界によりトルクが制限される可能性がある。このため、本実施形態では、極低速で第1実施形態の制御方法を用い、誘起電圧が十分大きくなる回転速度で第2の軸偏差量演算手段に切り替えるようにしている。
加速時、出力周波数ω1が所定の閾値Th2以上となった時点t1で、切替テーパゲイン111のゲインGの値を1に任意の時間で推移させる。ゲインGの値が1に到達する時点t2で、軸偏差量は完全にΔθemfに切り替わるので、高周波電圧振幅をゼロに推移させ、高周波電圧重畳を終了させる。
p軸とd軸との同期制御はその他の電動機制御系と独立しているため、時刻t3から時刻t4までの間に、p軸とd軸とを一致させる同期制御が達成され、スムーズな軸偏差量の切り替えが実現される。なお、高周波電圧振幅がゼロになっている間、θpの値はθdcの値を反映させておく。これにより、高周波電圧重畳が再開されたときのθpの初期値がθdcとなり、p軸とd軸との一致が迅速に行われる。
以上説明したように、本実施形態では、p軸とd軸とを一致させる同期制御をその他の制御系と独立して構成することで、軸偏差量切り替えに際して発生する軸偏差量の切替ショックを防ぎ、スムーズな切り替えと運転の持続とを実現することができる。
前記各実施形態では、電動機として、同期電動機を用いていたが、誘導電動機を用いることができる。
図13は、本発明の第3実施形態である電動機制御システムの構成図である。
電動機制御システム100dは、電動機1の代わりに誘導電動機131を用い、すべり補正手段132、及び加算器14が追加されている点が、第1実施形態、及び第2実施形態と相違する。
図13における励磁軸たるdc軸をd軸とするのが誘導電動機制御の慣例だが、第1実施形態、及び第2実施形態との関連から以降、励磁軸をdc軸と呼び、二次磁束位相をd軸と呼ぶものとする。
加算器14は、励磁位相調整手段10の出力((重畳軸の)位相変動速度)ω1に前述のすべり補償値ωs*を加算し、出力周波数ω1 **を出力する。誘導電動機131の発生トルクτMは(数12)で表わされる。
第1実施形態と同様に、励磁位相調整手段10はd軸とdc軸とを同期させる。その結果、二次磁束のqc軸成分φqcがゼロとなり、(数12)より、Iqcにより発生トルクを制御できるようになる。
また、すべり補償を実行しているため、励磁位相調整手段10の出力ω1は、定常状態において回転子の速度推定値となる。
以上説明したように、本実施形態の電動機制御システム100dによれば、誘導電動機131の磁気飽和に起因する突極性を利用する高周波電圧重畳方式において原理的問題となる軸誤差基準量の正弦波特性からくる軸偏差量推定誤差の問題を解決することができる。このため、本実施形態の電動機制御システム100dは、急激な負荷印加や急加減速に対しても脱調することなく電動機制御を持続することが可能である。
前記各実施形態では、電動機1又は電動機131のインダクタンスLd,Lqは線形であると仮定していた。しかし、電動機形状あるいは高負荷領域で電流量が増加した場合、磁気飽和などの非線形現象が発生する。その結果、図8の軸誤差基準量特性は電流動作点によって変化する。
一つ目の方法は、図14のθpd=0の点Bを動作点に設定する方法である。具体的には図5に示す重畳位相調整手段8内の軸誤差基準量の指令値Xθpd0を点Bに相当する適切な値に設定すればよい。その結果、重畳位相調整手段8はXθpd0が点Bに相当する値になるようにθpを調整し、結果的にθpdがゼロになり、p軸とd軸とは一致する。
二つ目の方法は、図14の点Aを動作点として設定する方法である。具体的には、上述の指令値Xθpd0は0のままにし、励磁位相調整手段10の指令値Δθc0を点Aによるずれ相当の値−θphiに設定する。重畳位相調整手段8は、p軸をd軸から位相θphiだけ進んだ方向にp軸を同期させる。
これらの補正で用いるΔθc0,Xθpd0の値は、例えば、電流検出値、又は電流指令値を入力とするテーブルによって実装する。簡易的には入力にゲインをかけて実装すればよい。
以上のように本実施形態によれば、電動機の非線形特性によりインダクタンスの突極性が変化する高負荷条件においても、問題なく電動機制御を持続することが可能になる。
Δθc0,Xθpd0の両方の値を適切に設定することで、図14中の任意の点を動作点に設定できる。これにより、動作点での高周波電圧位相方向を設定することができるため、例えば、高周波電流によるトルク振動(トルクリプル)が発生しないようなΔθc0,Xθpd0の組み合わせを選ぶことができる。
以上のように、本実施形態のようにΔθc0,Xθpd0を設定を適切に選ぶことで平衡時の高調波重畳位相を操作することができ、高周波電圧重畳によるトルクリプルを抑制することができ、騒音や振動を最小化することができる。
前記各実施形態の電動機制御装置40a,40b,40c,40dは、高周波交番電圧をdqc軸上で電圧指令に加算し、また、dqc軸上の検出電流Idc、Iqcに基づいて軸誤差基準量を計算してきた。この場合、電動機制御装置40a,40b,40c,40dは、交番電圧、及び高周波電流を、重畳位相調整手段8にとって本来無関係であるdqc軸に一旦座標変換する処理をキャンセルするために交番電圧発生手段6、及び軸誤差基準量演算手段7にはθdcに由来するθpdcが入力する必要があった。これは数式上はdqc軸から独立している重畳位相調整手段にとって、不要な計算を行っていることになり、サンプル遅れや演算誤差の影響が外乱として作用する可能性がある。本実施形態では、交番電圧をab軸上で加算することで、重畳位相調整手段の独立性を向上させる。
電動機制御システム100dは、座標変換手段5の代わりに、2相3相変換手段13及び座標変換手段16を備え、座標変換手段3の代わりに、3相2相変換手段14、及び座標変換手段15を備え、交番電圧発生手段6の代わりに、交番電圧発生手段151を備え、軸誤差基準量演算手段7の代わりに、軸誤差基準量演算手段152を備えている。
3相2相変換手段14は、ab軸からみた高周波電流信号Iac,Ibcを軸誤差基準量演算手段152に入力する。
軸誤差基準量演算手段152は、位相器152a,152c、及び加算器152b,152dが高周波電流信号Iac,Ibcの1回差分を演算し、この演算結果から交番電圧符号補正手段41を介して高周波電流成分ΔIac,ΔIbcを計算し、次に、高周波電圧電流位相差演算手段42bが(数9)の代わりに(数13)の計算を行う。
このように構成することにより、交番電圧及び高周波電流はdqc軸に交番電圧発生手段151と軸誤差基準量演算手段152とに、θdcに由来する信号が入力されなくなる。その結果、dqc軸の動作がサンプル遅れや演算誤差によって重畳位相調整手段8に影響することがなくなり、安定した電動機制御を実現できる。
2 電流検出手段
3 座標変換手段(uvw座標系からdqc座標系)
4 電圧演算手段
5 座標変換手段(dqc座標系からuvw座標系)
6 交番電圧発生手段
7 軸誤差基準量演算手段(高周波電流位相差演算手段)
7e 交番電圧符号補正手段
8 重畳位相調整手段
9 軸偏差量演算手段
10 励磁位相調整手段
11 電力変換器
13 2相3相変換手段(ab座標系からuvw座標系)
14 2相3相変換手段(uvw座標系からab座標系)
15 座標変換手段(ab座標系からdqc座標系)
16 座標変換手段(dqc座標系からab座標系)
40,40a,40b,40c,40d 電動機制御装置(ベクトル制御装置)
42 高周波電圧電流位相差演算手段
43 応答調整ゲイン
50,50a,50b,50c,50d 電力変換装置
100,100a,100b,100c,100d 電動機制御システム
101 第2の軸偏差量演算手段
102 励磁位相切替調整手段
111 切替テーパゲイン
131 誘導電動機
132 すべり補償手段
151 交番電圧発生手段
152 軸誤差基準量演算手段(高周波電流位相差演算手段)
E 直流電源
Claims (14)
- 励磁軸電圧及びこの軸に直交するトルク軸電圧を制御することにより、交流電動機に流れる電動機電流の励磁軸成分及びこの軸に直交する電流成分を目標値になるように、ベクトル制御するベクトル制御装置において、
前記電動機電流の周波数とは異なる周波数の交番電圧を前記励磁軸電圧の成分、及び前記トルク軸電圧の成分に分解して重畳する交番電圧重畳手段と、
前記交番電圧の基準位相を重畳軸とし、
前記交番電圧により前記電動機電流に発生する高周波電流の位相から前記重畳軸の位相を減算することにより、前記高周波電流と前記交番電圧との位相差を演算する高周波電流位相差演算手段と、
前記高周波電流位相差演算手段が演算した位相差が零又は所定の目標値となるように、前記重畳軸の位相方向を調整する重畳軸調整手段と、
前記重畳軸調整手段が方向を調整した前記重畳軸と前記励磁軸との間の軸偏差量を演算する軸偏差量演算手段と、
前記軸偏差量が零又は所定の目標値になるように、前記励磁軸の位相方向を調整する励磁軸調整手段と
を備えることを特徴とするベクトル制御装置。 - 請求項1に記載のベクトル制御装置において、
前記交流電動機は、突極性を有する同期電動機であり、
前記重畳軸調整手段は、前記磁極軸と前記重畳軸とを略一致させ、
前記軸偏差量演算手段が演算した前記軸偏差量は、前記磁極軸と前記励磁軸との間の位相差を表している
ことを特徴とするベクトル制御装置。 - 請求項1に記載のベクトル制御装置において、
前記交流電動機は、誘導電動機であり、
前記目標値に基づいて、すべり周波数指令値を計算するすべり周波数指令演算手段と、
前記重畳軸の位相変動速度に前記すべり周波数指令値を加算する加算器と、
前記加算器の出力周波数を積分する積分器とをさらに備え、
前記励磁軸調整手段が調整する前記励磁軸の位相方向は、前記積分器が出力する位相信号により定められることを特徴とするベクトル制御装置。 - 請求項1乃至請求項3の何れか一項に記載のベクトル制御装置において、
前記交流電動機は、その回転子の回転速度、回転子位置、及び励磁磁束位置の何れかの物理量を検出する制御量検出手段が取りつけられていないことを特徴とするベクトル制御装置。 - 請求項1乃至請求項4の何れか一項に記載のベクトル制御装置において、
前記交番電圧は、矩形波電圧及び正弦波電圧の何れか一方であることを特徴とするベクトル制御装置。 - 請求項1に記載のベクトル制御装置において、
前記励磁軸電圧、前記トルク軸電圧、前記電動機電流の励磁軸成分、及びこの軸に直交する成分、並びに前記目標値に基づいて、電動機の前記磁極軸と前記励磁軸との位相変分を演算する高速域軸偏差量演算手段と、
前記重畳軸の位相変動速度が設定値よりも高速になったときには、前記励磁軸調整手段の入力を、前記軸偏差量演算手段が演算した軸偏差量から前記高速域軸偏差量演算手段が演算した高速域軸偏差量に切り替える軸偏差量切替手段とをさらに備え、
前記交番電圧重畳手段は、前記高速になったときには、前記交番電圧の重畳を停止することを特徴とするベクトル制御装置。 - 請求項1に記載のベクトル制御装置において、
前記交流電動機の逆起電圧から電動機の前記磁極軸と前記励磁軸との位相変分を計算する高速域軸偏差量演算手段と、
前記重畳軸の位相変動速度が設定値よりも高速になったときには、前記励磁軸調整手段の入力を前記軸偏差演算手段が演算した軸偏差量から前記高速域軸偏差量演算手段が演算した高速域軸偏差量に切り替える軸偏差量切替手段とをさらに備え、
前記交番電圧重畳手段は、前記高速になったときには、前記交番電圧の重畳を停止することを特徴とするベクトル制御装置。 - 請求項6又は請求項7に記載のベクトル制御装置において、
前記軸偏差量切替手段は、
前記重畳軸の位相変動速度が前記設定値よりも遅い設定速度より低速に減速したときに、前記交番電圧重畳手段が電圧重畳を開始し、
前記重畳軸調整手段が前記重畳軸を前記交流電動機の回転子磁束に追従させる応答速度から決まる追従期間を経過した後に、前記励磁軸調整手段の入力を、前記高速域軸偏差量演算手段の出力から前記軸偏差推定量演算手段の出力に切り替えることを特徴とするベクトル制御装置。 - 請求項1又は請求項2に記載のベクトル制御装置において、
前記重畳軸調整手段が重畳軸を電動機回転子磁束に追従する応答速度は、前記励磁軸調整手段の応答速度より速いことを特徴とするベクトル制御装置。 - 請求項1又は請求項2に記載のベクトル制御装置において、
前記重畳軸調整手段は、前記高周波電流位相差演算手段が演算した位相差の目標値を、前記重畳軸と前記磁極軸とが略一致するように設定することを特徴とするベクトル制御装置。 - 請求項1又は請求項2に記載のベクトル制御装置において、
励磁位相調整手段は、
前記軸偏差量の目標値を、高周波電流によって発生する高周波電流の軌道が前記重畳軸と略一致する場合の励磁軸から見た重畳軸位相に設定することを特徴とするベクトル制御装置。 - 請求項1又は請求項2に記載のベクトル制御装置において、
前記高周波電流位相差演算手段が演算する位相差の目標値と前記軸偏差量の目標値とを、定常状態での電圧重畳方向が前記交番電圧の重畳によるトルクリプルを抑制する位相方向になるように設定することを特徴とするベクトル制御装置。 - 請求項1又は請求項2に記載のベクトル制御装置において、
前記軸誤差基準量は、前記重畳軸と前記交番電圧の重畳によって発生する高周波電流の軌道の位相との差分にゲインを乗算したものであることを特徴とするベクトル制御装置。 - 交流電動機と、
前記交流電動機を駆動する電力変換器と、
励磁軸電圧及びこの軸に直交するトルク軸電圧を制御することにより、前記交流電動機に流れる電動機電流の励磁軸成分及びこの軸に直交する電流成分が目標値になるように、前記交流電動機をベクトル制御する電動機制御装置とを備えた電動機制御システムにおいて、
前記電動機電流の周波数とは異なる周波数の交番電圧を前記励磁軸電圧の成分、及び前記トルク軸電圧の成分に分解して重畳する交番電圧重畳手段と、
前記交番電圧の基準位相を重畳軸とし、
前記交番電圧により前記電動機電流に発生する高周波電流の位相から前記重畳軸の位相を減算することにより、前記高周波電流と前記交番電圧との位相差を演算する高周波電流位相差演算手段と、
前記高周波電流位相差演算手段が演算した位相差が零又は所定の目標値となるように、前記重畳軸の位相方向を調整する重畳軸調整手段と、
前記重畳軸調整手段が方向を調整した前記重畳軸と前記励磁軸との間の軸偏差量を演算する軸偏差量演算手段と、
前記軸偏差量が零又は所定の目標値になるように、前記励磁軸の位相方向を調整する励磁軸調整手段と
を備えることを特徴とする電動機制御システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010193969A JP5351859B2 (ja) | 2010-08-31 | 2010-08-31 | ベクトル制御装置、及び電動機制御システム |
| CN201110232583.7A CN102386837B (zh) | 2010-08-31 | 2011-08-15 | 矢量控制装置以及电动机控制系统 |
| EP11178157.1A EP2424105B1 (en) | 2010-08-31 | 2011-08-19 | Vector control apparatus and motor control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010193969A JP5351859B2 (ja) | 2010-08-31 | 2010-08-31 | ベクトル制御装置、及び電動機制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012055041A true JP2012055041A (ja) | 2012-03-15 |
| JP5351859B2 JP5351859B2 (ja) | 2013-11-27 |
Family
ID=44677521
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010193969A Expired - Fee Related JP5351859B2 (ja) | 2010-08-31 | 2010-08-31 | ベクトル制御装置、及び電動機制御システム |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP2424105B1 (ja) |
| JP (1) | JP5351859B2 (ja) |
| CN (1) | CN102386837B (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014096875A (ja) * | 2012-11-08 | 2014-05-22 | Meidensha Corp | 同期電動機の制御方法 |
| JP2015154620A (ja) * | 2014-02-17 | 2015-08-24 | 富士電機株式会社 | 永久磁石形同期電動機の制御装置 |
| JP5837230B2 (ja) * | 2012-11-22 | 2015-12-24 | 三菱電機株式会社 | 交流回転機の制御装置、交流回転機の制御装置を備えた交流回転機駆動システムおよび電動パワーステアリングシステム |
| JP2016025714A (ja) * | 2014-07-18 | 2016-02-08 | 富士電機株式会社 | 永久磁石形同期電動機の制御装置 |
| WO2020194396A1 (ja) * | 2019-03-22 | 2020-10-01 | 三菱電機株式会社 | 永久磁石同期機の制御装置 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2677586A1 (en) | 2012-06-20 | 2013-12-25 | Solvay Sa | Bipolar electrode and method for producing same |
| CN105027421B (zh) * | 2013-02-21 | 2018-01-16 | 三菱电机株式会社 | 电动机控制装置 |
| CN107529351B (zh) * | 2015-01-12 | 2020-04-03 | 深圳市英威腾电气股份有限公司 | 一种电机的控制方法和装置 |
| CN106208862B (zh) * | 2016-08-03 | 2018-07-27 | 广东美的暖通设备有限公司 | 电机的控制方法、控制装置和风机 |
| CN107193294B (zh) * | 2017-07-14 | 2019-08-23 | 灵动科技(北京)有限公司 | 轮式机器人驱动电机的控制方法、装置及轮式机器人 |
| DE102018114960A1 (de) * | 2018-06-21 | 2019-12-24 | Valeo Siemens Eautomotive Germany Gmbh | Verfahren zum Ermitteln eines Offsets eines Rotorlagegebers, Steuerungseinrichtung für einen Stromrichter und elektrische Maschine für ein Fahrzeug |
| JP7159704B2 (ja) * | 2018-08-31 | 2022-10-25 | 株式会社アドヴィックス | モータ制御装置 |
| JP7205117B2 (ja) * | 2018-09-06 | 2023-01-17 | 株式会社アドヴィックス | モータ制御装置 |
| CN109724317B (zh) * | 2018-12-13 | 2021-08-24 | 重庆海尔空调器有限公司 | 用于空调器压缩机转速控制的方法 |
| CN109724334B (zh) * | 2018-12-13 | 2021-07-23 | 重庆海尔空调器有限公司 | 压缩机转速波动抑制方法和装置 |
| CN111030541B (zh) * | 2019-12-27 | 2023-04-18 | 泉州装备制造研究所 | 一种三相异步电机变步长扰动观测节能控制方法 |
| CN112821835B (zh) * | 2021-03-30 | 2022-09-09 | 宁波奥克斯电气股份有限公司 | 参数确定方法、装置及空调器 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07245981A (ja) * | 1994-03-01 | 1995-09-19 | Fuji Electric Co Ltd | 電動機の磁極位置検出装置 |
| JPH10323096A (ja) * | 1997-05-22 | 1998-12-04 | Shinko Electric Co Ltd | ベクトル制御方法およびその装置、ならびにセンサレスベクトル制御方法およびその装置 |
| JP2008206330A (ja) * | 2007-02-21 | 2008-09-04 | Meidensha Corp | 同期電動機の磁極位置推定装置および磁極位置推定方法 |
| JP2008295220A (ja) * | 2007-05-25 | 2008-12-04 | Meidensha Corp | 永久磁石同期電動機のセンサレス制御装置 |
| JP2010063208A (ja) * | 2008-09-01 | 2010-03-18 | Hitachi Ltd | 同期電動機の駆動システム、及びこれに用いる制御装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4596092B2 (ja) * | 2000-03-31 | 2010-12-08 | 株式会社安川電機 | 誘導電動機の磁束位置推定方法および制御装置 |
| JP3979561B2 (ja) | 2000-08-30 | 2007-09-19 | 株式会社日立製作所 | 交流電動機の駆動システム |
| JP4480696B2 (ja) * | 2005-08-26 | 2010-06-16 | 三洋電機株式会社 | モータ制御装置 |
| JP5435252B2 (ja) * | 2008-01-30 | 2014-03-05 | 株式会社ジェイテクト | 車両用操舵装置 |
-
2010
- 2010-08-31 JP JP2010193969A patent/JP5351859B2/ja not_active Expired - Fee Related
-
2011
- 2011-08-15 CN CN201110232583.7A patent/CN102386837B/zh not_active Expired - Fee Related
- 2011-08-19 EP EP11178157.1A patent/EP2424105B1/en not_active Not-in-force
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07245981A (ja) * | 1994-03-01 | 1995-09-19 | Fuji Electric Co Ltd | 電動機の磁極位置検出装置 |
| JPH10323096A (ja) * | 1997-05-22 | 1998-12-04 | Shinko Electric Co Ltd | ベクトル制御方法およびその装置、ならびにセンサレスベクトル制御方法およびその装置 |
| JP2008206330A (ja) * | 2007-02-21 | 2008-09-04 | Meidensha Corp | 同期電動機の磁極位置推定装置および磁極位置推定方法 |
| JP2008295220A (ja) * | 2007-05-25 | 2008-12-04 | Meidensha Corp | 永久磁石同期電動機のセンサレス制御装置 |
| JP2010063208A (ja) * | 2008-09-01 | 2010-03-18 | Hitachi Ltd | 同期電動機の駆動システム、及びこれに用いる制御装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014096875A (ja) * | 2012-11-08 | 2014-05-22 | Meidensha Corp | 同期電動機の制御方法 |
| JP5837230B2 (ja) * | 2012-11-22 | 2015-12-24 | 三菱電機株式会社 | 交流回転機の制御装置、交流回転機の制御装置を備えた交流回転機駆動システムおよび電動パワーステアリングシステム |
| JP2015154620A (ja) * | 2014-02-17 | 2015-08-24 | 富士電機株式会社 | 永久磁石形同期電動機の制御装置 |
| JP2016025714A (ja) * | 2014-07-18 | 2016-02-08 | 富士電機株式会社 | 永久磁石形同期電動機の制御装置 |
| WO2020194396A1 (ja) * | 2019-03-22 | 2020-10-01 | 三菱電機株式会社 | 永久磁石同期機の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102386837A (zh) | 2012-03-21 |
| EP2424105A3 (en) | 2018-03-28 |
| EP2424105A2 (en) | 2012-02-29 |
| EP2424105B1 (en) | 2019-07-24 |
| JP5351859B2 (ja) | 2013-11-27 |
| CN102386837B (zh) | 2014-10-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5351859B2 (ja) | ベクトル制御装置、及び電動機制御システム | |
| JP4674525B2 (ja) | 磁極位置推定方法及びモータ制御装置 | |
| JP4425193B2 (ja) | モータの位置センサレス制御装置 | |
| JP6324627B2 (ja) | 交流回転機の制御装置および電動パワーステアリングの制御装置 | |
| CN109690935B (zh) | 逆变器控制装置以及马达驱动系统 | |
| CN103812410B (zh) | 交流电动机的控制装置 | |
| US20170264227A1 (en) | Inverter control device and motor drive system | |
| WO2010109528A1 (ja) | 交流回転機の制御装置 | |
| JP7218700B2 (ja) | モータ制御装置 | |
| JP3771544B2 (ja) | 永久磁石形同期電動機の制御方法及び装置 | |
| JP2022131542A (ja) | インバータ制御装置およびインバータ制御装置の製造方法 | |
| JP7699908B2 (ja) | 電力変換装置 | |
| JP2011050168A (ja) | 同期電動機の制御装置 | |
| JP3914107B2 (ja) | Dcブラシレスモータの制御装置 | |
| JP5648310B2 (ja) | 同期モータの制御装置、及び同期モータの制御方法 | |
| JP5621103B2 (ja) | 単相信号入力装置及び系統連系装置 | |
| JP2016096666A (ja) | モータ制御装置 | |
| JP3735836B2 (ja) | 永久磁石同期電動機のベクトル制御方法 | |
| JP6848406B2 (ja) | インバータ制御装置 | |
| JP6089608B2 (ja) | 同期電動機の制御方法 | |
| US20140152206A1 (en) | Control device for alternating current rotating machine and electric power steering device equipped with control device for alternating current rotating machine | |
| JP2004048934A (ja) | Dcブラシレスモータのロータ角度検出装置 | |
| JP7226211B2 (ja) | インバータ装置及びインバータ装置の制御方法 | |
| JP2010022188A (ja) | モータの位置センサレス制御装置 | |
| JP2004072901A (ja) | Dcブラシレスモータのロータ角度検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120725 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130611 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130628 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130813 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130823 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5351859 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |