JP2010172053A - スロットレスモータ - Google Patents
スロットレスモータ Download PDFInfo
- Publication number
- JP2010172053A JP2010172053A JP2009009530A JP2009009530A JP2010172053A JP 2010172053 A JP2010172053 A JP 2010172053A JP 2009009530 A JP2009009530 A JP 2009009530A JP 2009009530 A JP2009009530 A JP 2009009530A JP 2010172053 A JP2010172053 A JP 2010172053A
- Authority
- JP
- Japan
- Prior art keywords
- permanent magnet
- magnetic ring
- motor
- core
- rotor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Abstract
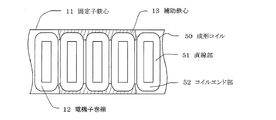
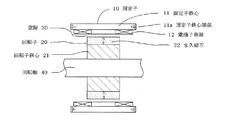
【解決手段】 電機子巻線12のコイルエンド部に補助鉄心13を、かつ、回転子鉄心に補助鉄心13に対向するように磁性リング24を追加することにより、コイルエンド部52の漏れ磁束が増加するため、巻線インダクタンスを大きくすることができ、従って電流リップルを小さく抑えることができるため、電流リップルに起因する高周波損失を小さくすることができ、モータ出力を大きくすることができる。
【選択図】 図1
Description
従来のスロットレスモータは、図7および図8のような構成をしている(例えば、特許文献1および2参照)。
図7は従来のスロットレスモータの正断面図で、図8は側断面図である。
図7、図8において、11は固定子鉄心であり、11aは固定子鉄心端部であり、12は電機子巻線である。前記電機子巻線12は固定子鉄心11の内周面に固着され、前記固定子鉄心11と前記電機子巻線12により固定子10を形成している。21は回転子鉄心であり、22は永久磁石である。30は空隙であり、40は回転軸である。
前記永久磁石22は、前記回転子鉄心21の外周面に固着され、前記回転子鉄心21と前記永久磁石22と前記回転軸40により、回転子20を形成している。前記回転子20は、前記固定子10の内部に、前記空隙30を介して対向するように配置されている。前記回転軸40の両側には、図示していない軸受が設置されており、同じく図示していないブラケットに前記軸受を収納し、前記ブラケットを、同じく図示していないフレームに嵌合することにより、前記回転子20を支えている。
次に、このように構成されたスロットレスモータの動作について説明する。
前記電機子巻線12に三相交流電流を流すことにより、前記固定子10の内部に回転磁界が発生し、この回転磁界と前記永久磁石22の作る磁界の相互作用により、前記回転子20が回転する。
上述したように、スロットレスモータは、固定子鉄心にティース及びスロットを有していないため、理論的にコギングトルクが発生せず、非常に滑らかに回転するという利点を有している。しかし、スロット付きモータと異なり、従来のスロットレスモータの前記電機子巻線12は、前記永久磁石22と前記固定子鉄心11間の前記空隙30に配置されているため、前記永久磁石22の外周表面から前記固定子鉄心11の内周表面までのいわゆる磁気ギャップは、スロット付きモータと比較して格段に大きくなる。磁気ギャップが大きくなると磁気抵抗が大きくため、通常スロットレスモータの巻線インダクタンスは、スロット付きモータの巻線インダクタンスに比べてかなり小さくなる。この巻線インダクタンスが小さいことがモータを駆動する際に障害となる。通常、永久磁石式同期形モータは、PWM駆動されるドライバ装置により駆動される。この際、巻線インダクタンスが小さいと電流リップルが大きくなり、その結果として、電流リップルに起因する高周波損失が大きくなる。そのことにより、モータの定格出力が低く抑えられるという問題があった。
また、この高周波損失は主として永久磁石に発生するために、永久磁石の温度が異常に高くなるために磁石が熱減磁しやすいという問題もあった。
巻線インダクタンスを大きくするためには、電動機とは別個に外部にリアクトルを追加することがもっとも簡単な方法であるが、リアクトルを設置するための空間が必要になると共に、電動機との接続も煩雑なものとなる欠点があった(例えば、非特許文献1参照)。
上記の問題を解決する一方策が、特許文献3に示されている。図9および図10は、特許文献3で開示されているスロットレスモータを示す。特許文献3のスロットレスモータが、特許文献1および2のスロットレスモータと異なる部分は、前記固定子鉄心端部11aにおいて、電機子巻線12のコイルエンド部52に接するように補助鉄心13を設置している点である。コイルエンド部52に補助鉄心13を設けているので、前記コイルエンド部52の漏れ磁束が増加する。そのため、外部に別個にリアクトルを追加することなく、巻線インダクタンスを大きくすることができる。以上のようにして、スロットレスモータの巻線インダクタンスが小さいという問題を解決している。
また、通常永久磁石式同期形モータは、モータを駆動するときに、その角度位置を検出するための角度センサが必須である。しかし、この角度センサは、モータの外径寸法、特に軸方向の長さを長くする。また、一般に角度センサは高価であるため、モータ全体の価格が高くなるという問題がある。そのため、角度センサを用いないでモータを駆動するための各種手法が提案されている(例えば、非特許文献2参照)。
その各種手法の中で、停止状態を含む低速度を安定して駆動することと、トルク制御を伴った安定な始動を実現することに対して、巻線インダクタンスの回転位置による大きさの変化、いわゆる回転位置依存性を用いた手法が一般的になってきている。しかしながら、そのためには回転子をいわゆる埋込磁石形の回転子にする必要がある。それは、表面磁石形の回転子では、回転子位置によらず、巻線インダクタンスがほぼ一定となり、上記の手法が適用できないためである。
しかしながら、埋込磁石形回転子を採用すると永久磁石を回転子鉄心の内部に配置するため、回転子の中央に大きな中空穴を設けることが困難になるという問題がある。
請求項1に記載の発明は、筒状の固定子鉄心と、前記固定子鉄心の内周面に固着された電機子巻線とを有する固定子と、回転軸に嵌合した回転子鉄心と、前記回転子鉄心の外周面に固着された永久磁石とを有する回転子とを備え、前記電機子巻線は、回転軸方向に延びる直線部と、軸方向に直交する方向に曲げられるコイルエンド部とを有し、前記回転子は、前記筒状の固定子の内部に空隙を介して対向するように配置されているスロットレスモータにおいて、前記電機子巻線のコイルエンドの、前記永久磁石と対向していない部分に、電機子巻線内周面を覆わないように電機子巻線と同一内径寸法で、補助鉄心を設け、かつ、前記永久磁石の軸方向の端部側に、前記永久磁石と軸方向に間隔をあけて、永久磁石と同外径の磁性リングを配置し、前記補助鉄心と前記磁性リングを、径方向の空隙を介して対向させたことを特徴とするものである。
請求項2に記載の発明は、前記補助鉄心および前記磁性リングは、絶縁被覆鉄粉形圧粉磁心材料で作られていることを特徴とするものである。
請求項3に記載の発明は、前記補助鉄心および前記磁性リングが、絶縁被覆鉄粉形圧粉磁心材料で作られていることを特徴とするものである。
請求項4に記載の発明は、前記磁性リングと前記永久磁石の軸方向の間隔が、永久磁石表面から固定子鉄心までの距離よりも広くしたことを特徴とするものである。
請求項1に記載の発明によると、電機子巻線の永久磁石と対向していない端部分、即ち、コイルエンド部に補助鉄心を追加し、かつ、回転子側に、前記補助鉄心と対向するように磁性リングを追加しているので、コイルエンド部の漏れ磁束を増加させることができ、外部に別個にリアクトルを追加することなく、また、モータ寸法を大きくすることなく、巻線インダクタンスを大きくすることができる。そのため、電流リップルが小さく抑えられ、その結果として高周波損失を小さく抑えることができる。従って、高周波損失が小さくなるために、モータの発熱が小さくなり、モータ出力を大きくすることができる。
また、前記補助鉄心は、電機子巻線内周面を覆わないように電機子巻線と同一内径寸法にしており、前記磁性リングは永久磁石と同一外径寸法としているため、固定子内への回転子の挿入および配置作業を容易にすることができる。
また、補助鉄心および磁性リングは、電機子巻線の直線部ではなく、コイルエンド部に配置しているため、トルク発生に関係する電機子巻線及び永久磁石からの磁束に悪影響を与えることがない。従って、補助鉄心および磁性リングを追加してもトルクが小さくなることを防ぐことができる。
また、高周波損失は主として永久磁石に発生するために、高周波損失を小さく抑えることができることにより、永久磁石の温度上昇を低く抑えることができ、その結果として磁石の熱減磁を防止することができる。
請求項2に記載の発明によると、補助鉄心および磁性リングは、絶縁被覆鉄粉形圧粉磁心材料としているので、補助鉄心および磁性リング内部の渦電流は非常に小さくなり、補助鉄心および磁性リング内部に発生する高周波損失を小さくすることができる。
請求項3に記載の発明によると、請求項1記載の発明と同様にコイルエンド部が補助鉄心と磁性リングにより覆われているため、巻線インダクタンスを大きくできる。そのため、電流リップルが小さく抑えられ、その結果として高周波損失を小さく抑えることができる。さらに、磁性リングを歯車形状としているため、電機子巻線のコイルエンドからの漏れ磁束は、前記歯車形状の磁性リングの歯の位置では、漏れが大きく、すなわちインダクタンスが大きくなり、一方、谷の位置では、漏れが小さくなり、インダクタンスが小さくなる。以上のように、巻線インダクタンスが回転子位置に応じて増減するため、インダクタンスの回転子位置依存性を用いた角度センサレス駆動が可能となる。従って、角度センサレス駆動が可能となるため、角度センサが省略でき、モータのコストダウンと小形化ができる。なお、前記、補助鉄心および磁性リングは、コイルエンド部に配置されているため、スロットレスモータ本来のトルク特性に悪影響を与えることがないという効果もある。
請求項4記載の発明によると、前記磁性リングと前記永久磁石の軸方向の間隔が、永久磁石表面から固定子鉄心までの距離よりも広くしているため、永久磁石から磁性リングへの軸方向の漏れ磁束を低減することができる。従ってモータのトルクの低下を抑えることができるため、モータ寸法を小形化することができる。
図1において、11は固定子鉄心であり、12は電機子巻線であり、13は補助鉄心である。前記電機子巻線12は、前記固定子鉄心11の内周面に固着され、前記固定子鉄心11と前記電機子巻線12と前記補助鉄心13により固定子10を形成している。21は回転子鉄心であり、22は永久磁石であり、24は磁性リングである。30は空隙であり、40は回転軸である。
前記永久磁石22は、前記回転子鉄心21の外周面に固着され、前記磁性リング24は、前記永久磁石22の軸方向側面に配置され、前記回転子鉄心21の外周面に固着されている。なお、前記磁性リング24は、前記永久磁石21と同一外径寸法または略同一外径寸法(以下、同一外径寸法という)としている。前記回転子鉄心21と前記永久磁石22と前記磁性リング24と前記回転軸40により回転子20を形成している。前記回転子20は、前記固定子10の内部に径方向の空隙30を介して対向するように配置されている。また、前記補助鉄心13と前記磁性リング24も前記空隙30を介して対向するように配置されている。前記回転軸40の両側には、図示していない軸受が設置されており、同じく図示していない負荷側ブラケットおよび反負荷側ブラケットに前記軸受を収納し、前記負荷側ブラケットおよび反負荷側ブラケットを同じく図示していないフレームに嵌合することにより、回転子20を支えている。
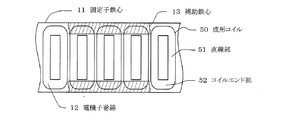
図2において、50は成形された電機子コイル、51は前記電機子コイル50の直線部で回転軸方向に延びている。52は前記電機子コイル50のコイルエンド部で、回転軸に直交する方向に延びている。前記電機子コイル50は、絶縁被覆銅線を小判形に巻回し、その後、前記固定子鉄心11の内周面に沿うように、円弧状に曲げ成形している。前記固定子鉄心11の内周面には、前記電機子コイル50が、周方向に複数個並べられて固着されており、これらの前記電機子コイル50を結線して電機子巻線12を形成している。
前記永久磁石22が空隙30を介して対向しているのは、前記直線部51であり、コイルエンド部52には、永久磁石22はほとんど対向していない。これは、トルクの発生に寄与するのは、主に前記直線部51であるからであり、前記コイルエンド部52はトルクの発生にはほとんど寄与していないためである。
図1および図2に示すとおり、前記補助鉄心13は電機子巻線12内周面に設置され、コイルエンド部52を取り囲むように取り付けられている。ただし、補助鉄心13の配置場所は、前記コイルエンド部52の軸方向側面のみで、電機子巻線12の内周面を覆わないように電機子巻線12と同一の内径寸法、または略同一の内径寸法(以下、同一の内径寸法という)としている。
このように、本発明が、図7乃至図10に示されている従来技術と異なる部分は、次の二点である。
第一は、前記電機子巻線12の前記コイルエンド部52に電機子巻線内周面を覆わないように前記電機子巻線12と同内径で、前記補助鉄心13を設置している点であり、第二は、前記永久磁石22の軸方向側面に、永久磁石22と同一の外径寸法の磁性リングを配置している点である。なお、本発明のスロットレスモータの正断面図は、図7のそれと同等であるため図示は省略する。
前記電機子巻線12に三相交流電流を流すことにより、前記固定子10の内部に回転磁界が発生し、この回転磁界と前記永久磁石22の作る磁界の相互作用により、前記回転子20が回転する。この点は従来技術と同様である。
次に、本発明で新たに追加している前記補助鉄心13と前記磁性リング24について詳しく説明する。
前記補助鉄心13は、前記電機子巻線12と同一内径寸法にて、前記コイルエンド部52に密着するように設置されている。また、前記磁性リング24は、前記永久磁石22と同一外径寸法にて、軸方向側面に、前記永久磁石22の側面とは少し間隔をおいて配置している。前記補助鉄心13および前記磁性リング24の材質としては、磁性材料であることは勿論であり、電磁鋼板を積層したものが望ましい。これは、前記補助鉄心13の内部に発生する渦電流による損失を小さく抑えるためである。
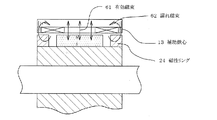
前記補助鉄心13および前記磁性リング24の働きは、図3に示すようになる。即ち、前記補助鉄心13と前記磁性リング24が、前記電機子巻線12のコイルエンド部52を覆うように設置されているため、前記補助鉄心13および前記磁性リング24を設置しない場合と比較して、前記電機子巻線12のコイルエンド部52の漏れ磁束62が大きくなる。前記コイルエンド部52の漏れ磁束62が大きくなることにより、前記コイルエンド部52の漏洩パーミアンスが大きくなり、その結果、巻線インダクタンスが大きくなる。
また、前記補助鉄心13および前記磁性リング24は、前記コイルエンド部52に配置しているため、トルク発生に関係する前記電機子巻線12及び前記永久磁石22からの有効磁束61に悪影響を与えることがない。
このように前記補助鉄心13および前記磁性リング24を、前記電機子巻線12のコイルエンド部52に配置することにより、巻線インダクタンスを大きくすることができる。巻線インダクタンスを大きくできることにより、電流リップルが小さく抑えられ、その結果として電流リップルに起因する高周波損失を小さく抑えることができる。従って、高周波損失が小さくなるために、モータの発熱が小さくなり、モータ出力を大きくすることができる。
本発明の第2実施例のスロットレスモータの構造、特性および動作は、前述した図1、2で示される本発明の第1実施例のスロットレスモータとほぼ同等であり、符号も同一であるため、図示および符号の説明は省略する。
第2の実施例が第1の実施例と異なる部分は、前記補助鉄心13および前記磁性リング24の材質のみである。第2の実施例では、前記補助鉄心13および前記磁性リング24を、絶縁被覆鉄粉形圧粉磁心材料を用いて作られている。絶縁被覆鉄粉形圧粉磁心材料とは、鉄粉表面を樹脂などの有機系物質あるいはガラスなどの無機系物質で被覆し、その後圧縮成形した軟磁性材料あり、鉄粉粒子間の電気的絶縁性を付与したもので、渦電流損の抑制を目的としている。
このように第2の実施例においては、前記補助鉄心13および前記磁性リング24を、絶縁被覆鉄粉形圧粉磁心材料としているので、電磁鋼板を使った場合のような鋼板の積層作業が省略でき、生産性を上げることができる。また、絶縁被覆鉄粉形圧粉磁心材料を使用しているため、積層していない一体物の形状でも、前記補助鉄心13および前記磁性リング24の内部に発生する渦電流は極めて小さくなり、前記補助鉄心13および前記磁性リング24の内部に発生する高周波損失を小さくすることができる。
前記電機子巻線12に三相交流電流を流すことにより、前記固定子10の内部に回転磁界が発生し、この回転磁界と前記永久磁石22の作る磁界の相互作用により、前記回転子20が回転する。この点は第1実施例と同様である。
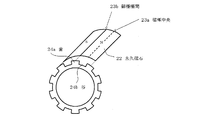
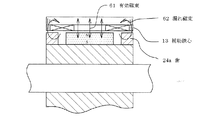
前記補助鉄心13および前記磁性リング24の働きは、図5、6に示すようになる。ここで図5、6において、24aは歯であり、24bは谷である。その他の符号は図3と同等であるため、説明は省略する。
前記補助鉄心13と前記磁性リング24は、前記電機子巻線12のコイルエンド部52を覆うように設置されているため、前記補助鉄心13および前記磁性リング24を設置しない場合と比較して、前記電機子巻線12のコイルエンド部52の漏れ磁束62が大きくなる。前記コイルエンド部52の漏れ磁束62が大きくなることにより、前記コイルエンド部52の漏洩パーミアンスが大きくなり、その結果、巻線インダクタンスが大きくなる。この点は、第1実施例と同等である。
さらに、第3実施例では、前記磁性リング24の形状を状を前記永久磁石22の極数と同じ歯数を持つ歯車形状としているため、前記電機子巻線12のコイルエンド部52からの漏れ磁束62は、前記歯車形状の磁性リングの歯の位置では、漏れが大きく、すなわちインダクタンスが大きくなり、一方、谷の位置では、漏れが小さくなり、インダクタンスが小さくなる。以上のように、巻線インダクタンスが回転子位置に応じて増減するため、インダクタンスの回転子位置依存性を用いた角度センサレス駆動が可能となる。従って、角度センサレス駆動が可能となるため、角度センサが省略でき、モータのコストダウンと小形化ができる。
また、その歯24aの位置をモータの磁極の極間位置24bに合わせ、谷24bの位置をモータ磁極の磁極中央23aに合わせている理由は、前記永久磁石22の磁極中央23aと同角度に、前記歯24aが配置していると、前記永久磁石22から前記磁性リング24への軸方向の漏れ磁束を増大し、有効磁束が減少し、トルクが低減するからである。
第4の実施例が第1〜3の実施例と異なる部分は、前記磁性リング24と前記永久磁石22の軸方向の間隔が、前記永久磁石22の表面から前記固定子鉄心11までの距離よりも広くしている点のみである。このような構成とすることにより、前記永久磁石22から前記磁性リング24への軸方向の漏れ磁束を低減することができる。従ってモータのトルクの低下を抑えることができるため、モータ寸法を小形化することができる。
11 固定子鉄心
11a 固定子鉄心端部
12 電機子巻線
13 補助鉄心
20 回転子
21 回転子鉄心
22 永久磁石
23a 磁極中央
23b 磁極極間
24 磁性リング
24a 歯
24b 谷
30 空隙
40 回転軸
50 成形コイル
51 直線部
52 コイルエンド部
61 有効磁束
62 漏れ磁束
Claims (4)
- 筒状の固定子鉄心と、前記固定子鉄心の内周面に固着された電機子巻線とを有する固定子と、
回転軸に嵌合した回転子鉄心と、前記回転子鉄心の外周面に固着された永久磁石とを有する回転子とを備え、
前記電機子巻線は、回転軸方向に延びる直線部と、軸方向に直交する方向に曲げられるコイルエンド部とを有し、
前記回転子は、前記筒状の固定子の内部に空隙を介して対向するように配置されているスロットレスモータにおいて、
前記電機子巻線のコイルエンドの、前記永久磁石と対向していない部分に、電機子巻線内周面を覆わないように電機子巻線と同一内径寸法で、補助鉄心を設け、
かつ、前記永久磁石の軸方向の端部側に、前記永久磁石と軸方向に間隔をあけて、永久磁石と同外径の磁性リングを配置し、
前記補助鉄心と前記磁性リングを、径方向の空隙を介して対向させたことを特徴とするスロットレスモータ。 - 前記補助鉄心および前記磁性リングは、絶縁被覆鉄粉形圧粉磁心材料で作られていることを特徴とする請求項1に記載のスロットレスモータ。
- 前記磁性リングは、前記回転子に装着された永久磁石の極数と同じ歯数を持つ歯車形状とし、その歯の位置をモータ磁極の極間位置に合わせ、谷の位置をモータ磁極の磁極中央位置に合わせていることを特徴とする請求項1に記載のスロットレスモータ。
- 前記磁性リングと前記永久磁石の軸方向の間隔が、永久磁石表面から固定子鉄心までの距離よりも広くしたことを特徴とする請求項1に記載のスロットレスモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009009530A JP5195450B2 (ja) | 2009-01-20 | 2009-01-20 | スロットレスモータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009009530A JP5195450B2 (ja) | 2009-01-20 | 2009-01-20 | スロットレスモータ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010172053A true JP2010172053A (ja) | 2010-08-05 |
| JP2010172053A5 JP2010172053A5 (ja) | 2012-03-29 |
| JP5195450B2 JP5195450B2 (ja) | 2013-05-08 |
Family
ID=42703631
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009009530A Expired - Fee Related JP5195450B2 (ja) | 2009-01-20 | 2009-01-20 | スロットレスモータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5195450B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012130245A (ja) * | 2010-12-15 | 2012-07-05 | Infranor Holding Sa | 永久磁石を備えた同期モータ |
| CN102646499A (zh) * | 2012-05-23 | 2012-08-22 | 镇江天力变压器有限公司 | 一种带辅助铁心的电力机车用干式变压器 |
| CN102739001A (zh) * | 2011-04-14 | 2012-10-17 | 东莞市毅瑞得电机有限公司 | 一种高效率无槽微电机 |
| CN108087425A (zh) * | 2018-01-20 | 2018-05-29 | 营口万意达智能装备科技有限公司 | 一种伺服电机磁悬浮推力轴承 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000278903A (ja) * | 1999-03-26 | 2000-10-06 | Nissan Motor Co Ltd | 電動機及びその製造方法 |
| JP2003244869A (ja) * | 2002-02-20 | 2003-08-29 | Sumitomo Electric Ind Ltd | 磁性部材およびその製造方法 |
| JP2003319583A (ja) * | 2002-04-17 | 2003-11-07 | Yaskawa Electric Corp | 同期モータ |
| JP2007135392A (ja) * | 2005-10-13 | 2007-05-31 | Yaskawa Electric Corp | スロットレスモータ |
| JP2010148261A (ja) * | 2008-12-19 | 2010-07-01 | Denso Corp | 回転電機 |
-
2009
- 2009-01-20 JP JP2009009530A patent/JP5195450B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000278903A (ja) * | 1999-03-26 | 2000-10-06 | Nissan Motor Co Ltd | 電動機及びその製造方法 |
| JP2003244869A (ja) * | 2002-02-20 | 2003-08-29 | Sumitomo Electric Ind Ltd | 磁性部材およびその製造方法 |
| JP2003319583A (ja) * | 2002-04-17 | 2003-11-07 | Yaskawa Electric Corp | 同期モータ |
| JP2007135392A (ja) * | 2005-10-13 | 2007-05-31 | Yaskawa Electric Corp | スロットレスモータ |
| JP2010148261A (ja) * | 2008-12-19 | 2010-07-01 | Denso Corp | 回転電機 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012130245A (ja) * | 2010-12-15 | 2012-07-05 | Infranor Holding Sa | 永久磁石を備えた同期モータ |
| JP2018033316A (ja) * | 2010-12-15 | 2018-03-01 | インフラノール・ホールディング・エスアー | 永久磁石を備えた同期モータ |
| CN102739001A (zh) * | 2011-04-14 | 2012-10-17 | 东莞市毅瑞得电机有限公司 | 一种高效率无槽微电机 |
| CN102646499A (zh) * | 2012-05-23 | 2012-08-22 | 镇江天力变压器有限公司 | 一种带辅助铁心的电力机车用干式变压器 |
| CN108087425A (zh) * | 2018-01-20 | 2018-05-29 | 营口万意达智能装备科技有限公司 | 一种伺服电机磁悬浮推力轴承 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5195450B2 (ja) | 2013-05-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4926107B2 (ja) | 回転電機 | |
| US9071118B2 (en) | Axial motor | |
| JP2016063728A (ja) | ブラシレスモータ | |
| JP5394756B2 (ja) | 永久磁石式回転電機の回転子 | |
| JP2008283785A (ja) | スイッチドリラクタンスモータ | |
| JP2008079471A (ja) | ファンシステム,電動機及びクローポール型モータ | |
| JP6048191B2 (ja) | マルチギャップ型回転電機 | |
| US20120086288A1 (en) | Electric rotating machine | |
| JP2010051150A (ja) | ブラシレスモータ | |
| WO2016060232A1 (ja) | ダブルステータ型回転機 | |
| JP5195450B2 (ja) | スロットレスモータ | |
| JP2018082600A (ja) | ダブルロータ型の回転電機 | |
| JP5063956B2 (ja) | スロットレスモータ | |
| JP2010161832A (ja) | 永久磁石式回転電機 | |
| JP2010183648A (ja) | 永久磁石回転電機及びそれを用いた電動車両 | |
| JP4929962B2 (ja) | スロットレスモータ | |
| JP4652382B2 (ja) | 電動パワーステアリング装置用永久磁石型ブラシレスモータ | |
| JP2016208800A (ja) | 電動モータ | |
| JP2007306798A (ja) | 電動パワーステアリング装置用永久磁石型ブラシレスモータ | |
| JPH1198728A (ja) | 永久磁石回転電機 | |
| JP2011024366A (ja) | 回転電機 | |
| JP2006025486A (ja) | 回転電機 | |
| JP2009296745A (ja) | 多極アキシャルギャップ型コンデンサ電動機とその製造方法 | |
| JP4607823B2 (ja) | 交流回転電機 | |
| JP2012130245A (ja) | 永久磁石を備えた同期モータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110908 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120209 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20120216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121217 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130121 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160215 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |