JP2010142335A - ミシンの糸切断装置 - Google Patents
ミシンの糸切断装置 Download PDFInfo
- Publication number
- JP2010142335A JP2010142335A JP2008320532A JP2008320532A JP2010142335A JP 2010142335 A JP2010142335 A JP 2010142335A JP 2008320532 A JP2008320532 A JP 2008320532A JP 2008320532 A JP2008320532 A JP 2008320532A JP 2010142335 A JP2010142335 A JP 2010142335A
- Authority
- JP
- Japan
- Prior art keywords
- thread
- cam
- yarn
- sewing
- catching
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Sewing Machines And Sewing (AREA)
Abstract
【解決手段】水平釜の内釜が外釜に追従して回転しないように内釜の回転を規制するため、当該内釜に接触して規制力を付勢する内釜回り止めを有し、水平釜と針穴との間に渡る上糸又は下糸の少なくとも何れか一方の縫い糸を切断するミシンの糸切断装置である。糸切断装置は、針板の下方で進退移動して縫い糸を捕捉する第一糸捕捉部材と、第一糸捕捉部材により捕捉され縫い糸を捕捉して固定刃に案内し切断する第二糸捕捉部材と、内釜回り止めと内釜との間に隙間を形成する隙間形成部と、第一糸捕捉部材による捕捉動作の後に第二糸捕捉部材による捕捉動作と切断動作とを行わせるとともに、第一糸捕捉部材により捕捉された縫い糸が内釜回り止めを通過する際に、隙間形成部による隙間形成動作を行わせる動作装置と、を備える。
【選択図】図3
Description
次回縫製時に縫い糸を確実に絡ませるには、切断後にミシン側に残る縫い糸の残端長さを確保することが必要となる。つまり、糸捕捉部と固定刃とで縫い糸を切断する従来のミシンの糸切断装置によれば、切断後にミシン側に残る縫い糸の残端長さを確保しようとすると、切断後に布側に残る縫い糸の残端長さもそれに伴い長くなってしまうという問題があった(図20参照)。
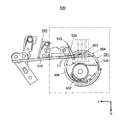
糸切り動作の開始タイミングとなると、図22に示すように、動作装置540によって第一糸捕捉部材510が釜機構501に向けて前進する。これにより、第一糸捕捉部材510は、針板の下方でボビン502と針穴503との間に掛け渡された下糸T2に係合する位置まで移動されることになる。また、この動作に連動するように動作装置540によって第二糸捕捉部材520も釜機構501に向けて前進する。
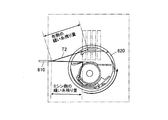
しかしながら、糸切断時においては、上糸T1の張力によって内釜505が外釜506に押しつけられていると、上糸T1が内釜回り止め507に引っかかってしまう。これにより、上糸T1のミシン側残り量が増大したり、釜504に上糸T1が巻き付く等の問題を生ずるおそれがあった。
水平釜の内釜が外釜に追従して回転しないように前記内釜の回転を規制するため、当該内釜に接触して規制力を付勢する内釜回り止めを有し、前記水平釜と針穴との間に渡る上糸又は下糸の少なくとも何れか一方の縫い糸を切断するミシンの糸切断装置であって、
針板の下方で進退移動して縫い糸を捕捉する第一糸捕捉部材と、
前記第一糸捕捉部材により捕捉されることで前記針穴と前記第一糸捕捉部材との間に掛け渡された縫い糸を捕捉して固定刃に案内し切断する第二糸捕捉部材と、
前記内釜回り止めと前記内釜との間に隙間を形成する隙間形成部と、
前記第一糸捕捉部材による捕捉動作の後に前記第二糸捕捉部材による捕捉動作と切断動作とを行わせるとともに、前記第一糸捕捉部材により捕捉された縫い糸が前記内釜回り止めを通過する際に、前記隙間形成部による隙間形成動作を行わせる動作装置と、を備えることを特徴としている。
前記隙間形成部には、縫い糸を捕捉する糸捕捉部が設けられていて、
前記動作装置は、前記切断動作が行われる前に前記糸捕捉部による捕捉動作を行わせることを特徴としている。
以下、図1〜図18を参照しながら本発明を実施するための最良の形態について詳しく説明する。但し、以下に述べる実施形態には、本発明を実施するために技術的に好ましい種々の限定が付されているが、発明の範囲を以下の実施形態及び図示例に限定するものではない。また、本実施形態においては、各図中に示したXYZ軸を基準にしてミシン1(後述する)の各部の方向を定めるものとする。ミシン1を水平面に設置した状態において、Z軸方向は鉛直方向となる上下方向を示し、Y軸方向はアーム部11の長手方向と一致する左右方向を示し、X軸方向は水平且つY軸方向に直交する前後方向を示す。
ミシン1は、所定の布送り方向に沿う正逆方向について任意の送りピッチで布送りを行いつつ、布の送り方向に直交する方向に針振りを行い、一針ごとに被縫製物に対して任意の位置に針落ちを行うことで任意の模様縫いを行う家庭用ミシンである。
以下、各部について詳しく説明する。
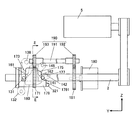
図1に示すように、ミシンフレーム10は、当該ミシンフレーム10の上部をなすアーム部11と、ミシンフレーム10の下部をなしアーム部11と平行に延設されたベッド部12と、アーム部11とベッド部12とを連結し、アーム部11及びベッド部12の長手方向と直交する上下方向(Z軸方向)に立設される縦胴部13とからなり、その外形が正面視にて略コ字状に成形されている。
アーム部11内には、その長手方向であるY軸方向に沿って主軸としての上軸(図示略)が回転自在に設けられており、該上軸にはミシン動作の主たる駆動源となるミシンモータ5が連結されている。また、アーム部11の先端における作業者側の端面には、糸切り機構100による糸切り動作の開始を入力する糸切りボタン30が設けられている。
図示しない針駆動機構は、アーム部11の先端内部において上軸の先端に固定された回転錘(図示略)と、回転錘の偏心部に回転自在に連結されたクランクロッド(図示略)と、クランクロッドの下端に連結された針棒と、針棒の下端に支持された縫い針3とを備えている。そして、ミシンモータ5の駆動により上軸が回転すると、回転錘及びクランクロッドを介して針棒に上下動が伝達され、縫い針3が往復上下動を行う。
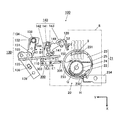
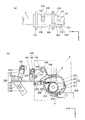
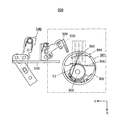
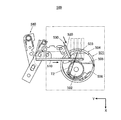
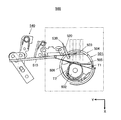
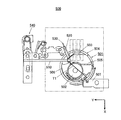
釜機構20は、ベッド部12の先端側の内部であって、針駆動機構による縫い針3の針落ち近傍に配置されている。釜機構20は、図3に示すように、Z軸方向に沿って垂直に設けられた図示しない釜軸を中心に回転する水平釜21を備えている。この水平釜21は、図示しない釜軸ギヤを介して下軸2から動力を得て回転する外釜22と、外釜22の内側に配設された回転しない内釜23とを備えている。外釜22は、上軸及び下軸2の二倍の回転速度、すなわち二倍の回転数で回転し、縫い針3が上昇する際にベッド部12内に形成される上糸T1のループを外周に設けられた剣先25で捕捉する。そして、内釜23の内部には、下糸T2が巻かれたボビン24が交換且つ回転自在に装備される。かかる水平釜21の上部は開放されており、ボビン24から繰り出される下糸T2が当該下糸T2の下糸経路に沿って供給され、上糸T1と交絡されることで縫い目が形成される。
ここで、糸切り機構100について説明する。
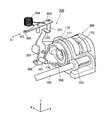
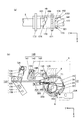
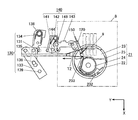
糸切り機構100は、水平釜21と針穴9との間に渡る上糸T1又は下糸T2の少なくとも何れか一方の縫い糸Tを切断する本発明に係るミシンの糸切断装置である。図2は糸切り機構100の一部構成を示す分解斜視図である。この図2に示すように、針板8の下方で進退移動して縫い糸Tを捕捉する第一糸捕捉部材たる第一糸捕捉体110と、第一糸捕捉体110により捕捉されることで針穴9と糸捕捉部111との間に掛け渡された縫い糸Tを捕捉して固定刃150に案内し切断する第二糸捕捉部材たる第二糸捕捉体120と、第一糸捕捉体110による捕捉動作の後に第二糸捕捉体120による捕捉動作と切断動作とを行わせる動作装置200とを備えている。
第二糸捕捉体120は、第一糸捕捉体110の糸捕捉部111と針穴9との間に掛け渡された縫い糸Tを捕捉可能な高さ(所定高さ)を通過する(図4(b)参照)。つまり、第二糸捕捉体120は、図4(b)に示すように、その前端が針板8に近い上部側ほど先鋭となっており、この前端が、第一糸捕捉体110の糸捕捉部111に捕捉された縫い糸Tと針板8との間を通過するように移動する。
スライド部材303の基端部には、揺動部材302の係合片322が係合される非係合部331が設けられている。また、スライド部材303の先端部には、縫い糸Tを捕捉する糸捕捉部305が設けられている。糸捕捉部305は、先端が進退移動の後方側E2に向けて曲成されたフック状に形成されている。スライド部材303は、前進時においては、図3に示す内釜22の係合凹部233内に進入して、当該係合凹部233を外側から内側に向けて水平方向に押すことになる。これにより、内釜23が図3における時計回りに回転することになる。
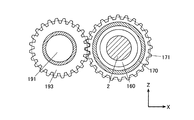
具体的に、上記各原節たる端面カム部161,162は、後述する切断制御手段としての制御部50によりミシンモータ5が駆動されることで回転する下軸2の回転量に応じて、各従節131,141を所定のタイミング及び所定の移動量で案内するように、回転方向の位相に応じて段階的に起伏した端面形状を有している(図10参照)。
この糸捕捉体駆動カム170の外周部におけるスラスト方向の両端部近傍には、それぞれ当該糸捕捉体駆動カム170を回動自在に支持する支持部材178に当接されることで該糸捕捉体駆動カム170のスラスト方向の位置決めを行うギヤ171及びフランジ172が設けられている。このうち、ギヤ171は、ステッピングモータ180から当該糸捕捉体駆動カム170に回動力を伝達するための従動ギヤとなっている。
待機部176は、後述する第一リンク機構130のカム当接部131が該待機部176に係合した際に、第一糸捕捉体110をその進退移動における最後退位置である待機位置(図12(b)参照)に配置する。すなわち、待機部176は、第一糸捕捉体110を後退させて、糸切りカム160の原節たる端面カム部161とその従節たる第一リンク機構130のカム当接部131とを非係合とする位置に当該カム当接部131を移動して保持する当接部位として機能する。つまり、カム当接部131を待機部176に保持して第一糸捕捉体110を待機位置(図12(b)参照)に配置した際には、下軸2及び糸切りカム160は回転を害されることなく自在に回転できるようになっている。
そして、糸捕捉体駆動カム170は、原節である円周カム部174及び端面カム部175が、ステッピングモータ180の正転により第一糸捕捉体110及び第二糸捕捉体120を共に最後退位置から最前進位置まで移動した後、ステッピングモータ180の逆転により第二糸捕捉体120を最前進位置に配置したまま第一糸捕捉体110を後退途中の糸捕捉位置に配置するように各カム当接部131,141を案内する(図9参照)。
そして、第一リンク機構130は、ばね134の付勢力により、第一糸捕捉体110に常に前進移動方向C1(図3及び図7における右方向)に向かう移動力を伝達するとともに、糸切りカム160又は糸捕捉体駆動カム170が回動することでばね134の付勢力に抗してカム当接部131がベッド部12先端側(図3及び図7における左側)に移動された際には、第一糸捕捉体110に後退方向C2(同左側)に向かう移動力を伝達する。
そして、第二リンク機構140は、ばね144の付勢力により、第二糸捕捉体120に常に前進移動方向(図3に示す矢印D1方向)に向かう移動力を伝達するとともに、糸切りカム160又は糸捕捉体駆動カム170が回動することでばね144の付勢力に抗してカム当接部141が縦胴部13側(図3及び図7における右方向)に移動された際には、第二糸捕捉体120に後退方向(図3に示す矢印D2方向)に向かう移動力を伝達する。
次に、図11に基づきミシン1の制御系の構成について詳しく説明する。
図11は、ミシン1の電気的構成を示す制御ブロック図である。図11に示すように、制御部50は、後述する各種の制御及び処理を行うための各種プログラムと各種の模様縫いを行うための縫製データその他各種設定データを記憶するROM52と、ROM52内の各種のプログラムを実行するCPU51と、各種のプログラムの実行に際して作業領域となるRAM53と、CPU51,ROM52及びRAM53とバスを介して接続された入力インターフェース54及び出力インターフェース55と、ミシンモータ5への電源供給により駆動を行うスイッチング駆動回路56と、針棒揺動用ステッピングモータ90への電源供給により駆動を行う駆動回路57と、送り歯駆動用ステッピングモータ91への電源供給により駆動を行う駆動回路58と、糸捕捉体駆動用ステッピングモータ180への電源供給により駆動を行う駆動回路59とを備えている。
エンコーダ6は、ミシンモータ5の回転軸に取り付けた図示しない円盤と光学センサによって構成されている。円盤には円周に沿って等間隔にスリットが開けられており、光学センサは円盤を挟んで配置された光源と受光素子とを備えている。そして、図示しない上軸が1回転すると光源からの光の透過と遮断との繰り返しにより受光素子からパルス信号が発生する。このエンコーダ6では、上軸一回転につき光学センサが180パルスを発生するように設計されている。エンコーダ6が出力するパルス信号は、入力インターフェース54のパルスカウンタに入力される。
具体的に、制御部50は、糸切り開始スイッチである糸切りボタン30の押下が検出されると、切断制御として、CPU51が主軸位置検出センサ18の検出信号を読み込み、下軸2が所定の回転角度(例えば、針棒が下停止する際の下軸角度)に位置する際にステッピングモータ180を正転方向に駆動することにより、第一糸捕捉体110及び第二糸捕捉体120を共に最後退位置から最前進位置まで移動した後、ステッピングモータ180を逆転方向に駆動して第二糸捕捉体120を最前進位置に配置したまま第一糸捕捉体110を後退途中の糸捕捉位置に配置する制御を実行する。なお、かかる制御は、糸捕捉体駆動カム170の周方向に渡って所定の位相に形成された円周カム部174及び端面カム部175の各カム形状(図9参照)に応じて、当該糸捕捉体駆動カム170を軸周りに所定量回動させるようにCPU51がステッピングモータ180を駆動することで行われる。
次に、ミシン1の動作説明を行う。
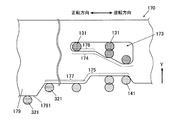
まず、縫製中は、図12(a)に示すように、第一リンク機構130のカム当接部131が糸捕捉体駆動カム170における円周カム部174の待機部176に配置されるとともに、第二リンク機構140のカム当接部141が糸捕捉体駆動カム170における端面カム部175の待機部177に配置された状態で保持されている。このため、各カム当接部131,141と糸切りカム160とが相互に干渉することはなく、下軸2及び糸切りカム160は自由に回転することができる。
また、第一糸捕捉体110及び第二糸捕捉体120は、図12(b)に示すように、それぞれの進退移動方向における最後退位置すなわち待機位置に配置された状態で待機している。また、隙間形成部300の係合突起321は、隙間形成用カム179の先端面1791に当接しているので、スライド部材303も内釜23とは係合しない待機位置で待機している。
そして、糸捕捉体駆動カム170が初期位置から矢印G方向に180°回動されるまでステッピングモータ180が駆動されると、針板8の下方でボビン24と針穴9との間に掛け渡された下糸T2の当該下糸経路を糸捕捉部111が通過するように第一糸捕捉体110が最前進位置まで移動される。また、上記糸捕捉体駆動カム170の回動により、第二糸捕捉体120は、その先端の糸捕捉部121が水平釜21の上方であって第一糸捕捉体110に近接する針落ち近傍の最前進位置まで移動される(図13(b)参照)。
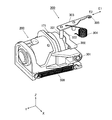
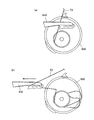
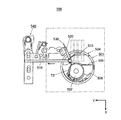
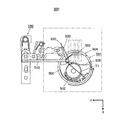
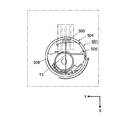
ここで、上述したように、水平釜30(外釜22)は下軸2の回転数に対して二倍の回転数で回転されるため、下軸2が半回転すなわち180°程回転すると、水平釜30(外釜22)はほぼ360°すなわち一回転することとなる。つまり、下軸2及び糸切りカム160が半回転する間に内釜23を通過した上糸T1が、図15(b)に示すように、各糸捕捉体110,120の糸捕捉部111,121及び隙間形成部300の糸捕捉部305に同時に捕捉される。この際、内釜23と内釜回り止め234との間には隙間Hが形成されているために、この隙間Hによって上糸T1は内釜回り止め234から抵抗を受けることなくスムーズに内釜23−内釜回り止め234間を通過することになる。
この時点で、糸捕捉部111には上糸T1及び下糸T2が捕捉され、糸捕捉部121には上糸T1が捕捉された状態となる。また、図15(a)に示すように、糸切りカム160の端面カム部161がカム当接部131に当接する位置まで回転すると、糸切りカム160の端面カム部161を原節として従節たるカム当接部131が、図16(a)に示すように、端面カム部161に沿って左方向に移動される。これに伴い、第一糸捕捉体110がさらに後退(後半)する。
そして、第二糸捕捉体120の糸捕捉部121が、糸切断位置を通過してさらに後退移動し最後退位置まで移動することで、図18(b)に示すように、当該糸捕捉部121によって固定刃150に導かれた上糸T1及び下糸T2が切断される。このとき、上糸T1は、隙間形成部300の糸捕捉部305によって捕捉されたままであるので、二重切を生ずるおそれもない。
さらに、CPU51は、駆動回路56を介してミシンモータ5を停止した後、駆動回路59を介してステッピングモータ180の逆転駆動(後半)を再開することで糸捕捉体駆動カム170を逆方向(戻り方向)に原点位置まで駆動する処理を実行する。これにより、糸捕捉体駆動カム170が初期位置(0°)まで逆方向に回転し、カム当接部131が円周カム部174の待機部176内に案内されるとともに、カム当接部141が端面カム部175の待機部177に案内される。また、隙間形成部300の係合突起321も、隙間形成用カム179の先端面1791に案内される。したがって、第一糸捕捉体110、第二糸捕捉体120及び隙間形成部300のスライド部材303が何れも待機位置に保持され、縫製可能な状態となって糸切り処理が終了する。
以上のように、本実施形態たる糸切り機構100によれば、第一糸捕捉体110により捕捉された縫い糸Tが内釜回り止め234を通過する際に、隙間形成部300によって内釜回り止め234と内釜23との間に隙間Hが形成されているので、上糸T1はその隙間Hを通過することになる。これにより、上糸T1が内釜回り止め234で引っかかってしまうことが防止される。
なお、本発明は上記実施形態に限らず適宜変更可能であるのは勿論である。
2 下軸
3 縫い針
5 ミシンモータ
6 エンコーダ
7 主軸位置検出センサ
8 針板
9 針穴
10 ミシンフレーム
11 アーム部
12 ベッド部
13 縦胴部
20 釜機構
21 水平釜
22 外釜
23 内釜
24 ボビン
25 剣先
30 糸切りボタン(糸切り開始スイッチ)
50 制御部(切断制御手段)
51 CPU
52 ROM
53 RAM
100 糸切り機構(ミシンの糸切断装置)
110 第一糸捕捉体(第一糸捕捉部材)
111 糸捕捉部
120 第二糸捕捉体(第二糸捕捉部材)
121 糸捕捉部
130 第一リンク機構
131 カム当接部
132,133 リンク
134 ばね
135,136 長穴
137 ピン
138,139 旋回軸
140 第二リンク機構
141 カム当接部
142,143 リンク
144 ばね
145,146 長穴
147 ピン
148,149 旋回軸
150 固定刃
160 糸切りカム
161 端面カム部
162 端面カム部
170 糸捕捉体駆動カム
171 ギヤ
172 フランジ
173 開口部
174 円周カム部
175 端面カム部
176,177 待機部
178 支持部材
180 糸捕捉体駆動用ステッピングモータ
181 ギヤ
190 動力伝達機構
191 トルク伝達軸
192 ギヤ
193 駆動ギヤ
200 動作装置
300 隙間形成部
305 糸捕捉部
T 縫い糸
T1 上糸(縫い糸)
T2 下糸(縫い糸)
Claims (2)
- 水平釜の内釜が外釜に追従して回転しないように前記内釜の回転を規制するため、当該内釜に接触して規制力を付勢する内釜回り止めを有し、前記水平釜と針穴との間に渡る上糸又は下糸の少なくとも何れか一方の縫い糸を切断するミシンの糸切断装置であって、
針板の下方で進退移動して縫い糸を捕捉する第一糸捕捉部材と、
前記第一糸捕捉部材により捕捉されることで前記針穴と前記第一糸捕捉部材との間に掛け渡された縫い糸を捕捉して固定刃に案内し切断する第二糸捕捉部材と、
前記内釜回り止めと前記内釜との間に隙間を形成する隙間形成部と、
前記第一糸捕捉部材による捕捉動作の後に前記第二糸捕捉部材による捕捉動作と切断動作とを行わせるとともに、前記第一糸捕捉部材により捕捉された縫い糸が前記内釜回り止めを通過する際に、前記隙間形成部による隙間形成動作を行わせる動作装置と、を備えることを特徴とするミシンの糸切断装置。 - 請求項1記載のミシンの糸切断装置において、
前記隙間形成部には、縫い糸を捕捉する糸捕捉部が設けられていて、
前記動作装置は、前記切断動作が行われる前に前記糸捕捉部による捕捉動作を行わせることを特徴とするミシンの糸切断装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008320532A JP5588104B2 (ja) | 2008-12-17 | 2008-12-17 | ミシンの糸切断装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008320532A JP5588104B2 (ja) | 2008-12-17 | 2008-12-17 | ミシンの糸切断装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010142335A true JP2010142335A (ja) | 2010-07-01 |
| JP5588104B2 JP5588104B2 (ja) | 2014-09-10 |
Family
ID=42563395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008320532A Active JP5588104B2 (ja) | 2008-12-17 | 2008-12-17 | ミシンの糸切断装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5588104B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112030374A (zh) * | 2019-06-04 | 2020-12-04 | Juki株式会社 | 缝制系统 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5289240U (ja) * | 1975-12-23 | 1977-07-04 | ||
| JPS5289241U (ja) * | 1975-12-23 | 1977-07-04 | ||
| JPS57148985A (en) * | 1981-03-06 | 1982-09-14 | Mitsubishi Electric Corp | Opener device for sewing machine |
| JPS58130680U (ja) * | 1983-01-12 | 1983-09-03 | ジューキ株式会社 | ミシンの糸切り装置 |
| JP3106472B2 (ja) * | 1990-01-12 | 2000-11-06 | ブラザー工業株式会社 | ミシンの糸切装置 |
| JP2008259753A (ja) * | 2007-04-13 | 2008-10-30 | Juki Corp | ミシンの糸切断装置 |
-
2008
- 2008-12-17 JP JP2008320532A patent/JP5588104B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5289240U (ja) * | 1975-12-23 | 1977-07-04 | ||
| JPS5289241U (ja) * | 1975-12-23 | 1977-07-04 | ||
| JPS57148985A (en) * | 1981-03-06 | 1982-09-14 | Mitsubishi Electric Corp | Opener device for sewing machine |
| JPS58130680U (ja) * | 1983-01-12 | 1983-09-03 | ジューキ株式会社 | ミシンの糸切り装置 |
| JP3106472B2 (ja) * | 1990-01-12 | 2000-11-06 | ブラザー工業株式会社 | ミシンの糸切装置 |
| JP2008259753A (ja) * | 2007-04-13 | 2008-10-30 | Juki Corp | ミシンの糸切断装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112030374A (zh) * | 2019-06-04 | 2020-12-04 | Juki株式会社 | 缝制系统 |
| CN112030374B (zh) * | 2019-06-04 | 2023-08-29 | Juki株式会社 | 缝制系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5588104B2 (ja) | 2014-09-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008259753A (ja) | ミシンの糸切断装置 | |
| JP5042573B2 (ja) | ミシン | |
| JP5073272B2 (ja) | ミシン | |
| JP2009195464A (ja) | ミシンの糸切り装置 | |
| KR20130131491A (ko) | 솔기의 풀림 멈춤 방법, 솔기의 풀림 멈춤 장치 및 솔기 구조 | |
| JP4501136B2 (ja) | 縫い目のほつれ防止装置 | |
| US7603957B2 (en) | Thread cutting device of sewing machine | |
| JP5925603B2 (ja) | ミシン | |
| CN106283422B (zh) | 缝纫机 | |
| JP2009061020A (ja) | ミシンの糸切り装置 | |
| JP2006102400A (ja) | ミシン | |
| JP2009061102A (ja) | ミシンの糸切り装置 | |
| JP2009066191A (ja) | 縫目ほつれ防止方法およびその装置 | |
| JP5468334B2 (ja) | 縫目ほつれ防止方法およびその装置 | |
| JP2009011547A (ja) | ミシン | |
| JP5588104B2 (ja) | ミシンの糸切断装置 | |
| JP2008068001A (ja) | ミシン | |
| JP2009240389A (ja) | ミシン | |
| CN101864647B (zh) | 缝纫机的切线装置 | |
| JP2006102399A (ja) | ミシン | |
| JP2566199Y2 (ja) | ミシンの自動糸切り装置 | |
| JP2010063571A (ja) | ミシン | |
| JP2007215734A (ja) | ミシン | |
| JP5059367B2 (ja) | ミシンの糸切断装置 | |
| JP4903526B2 (ja) | ミシンの糸切断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130306 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130319 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130513 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131203 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140701 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140725 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5588104 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |