JP2010098198A - 基板収容容器およびその位置決め構造 - Google Patents
基板収容容器およびその位置決め構造 Download PDFInfo
- Publication number
- JP2010098198A JP2010098198A JP2008269215A JP2008269215A JP2010098198A JP 2010098198 A JP2010098198 A JP 2010098198A JP 2008269215 A JP2008269215 A JP 2008269215A JP 2008269215 A JP2008269215 A JP 2008269215A JP 2010098198 A JP2010098198 A JP 2010098198A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- container
- mounting
- positioning
- storage container
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Packaging Frangible Articles (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
【解決手段】本発明に係る基板収容容器10は、載置台200上に水平に載置、位置決めされ、その内部に基板Wが収容され、基板収容容器10の、載置台200の載置面201に載置される載置部15に、先端が載置面201と平行な平坦面311に形成された突起部31を少なくとも3つ設けると共に、漏斗状の凹部32を少なくとも2つ設け、各突起部31の平坦面311を載置面201に当接させ、平面同士を面接触させるようにしたものである。
【選択図】 図4
Description
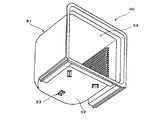
従来は、図13に示すように、基板収容容器90の容器本体91の底面92に位置決め部材である断面V字状をした凹部材93を複数箇所設け、図14に示すように、載置台100の載置面101に凸部材である位置決めピン102を設け、それぞれの凹凸部材93,102を相互に嵌合させることにより、基板収容容器90と載置台100との位置決めを行っていた。容器本体91の開口部94は、図14に二点鎖線で示す蓋部材95により開閉自在とされる。
前者の例としては、精密基板を収納する精密基板収納容器の、容器本体の底面に備えられ、精密基板を加工するための加工装置側の位置決めピンとの係合に用いられる精密基板収納容器の位置決め部材が挙げられる(特許文献1参照)。この位置決め部材は、容器本体の底面に一体化されてなる。
また、前記平坦面の少なくとも1つを、容器在席検出のための被在席検出部としてもよい。
また、前記基板収容容器は、その本体の底に基板収容容器を水平に支持するスタンド部を有し、そのスタンド部の底部に前記突起部および前記凹部を設けてもよい。
また、前記突起部の平坦面の少なくとも2つに、前記凹部を設けてもよい。
また、前記載置部に前記凹部を離間して2つ設けると共に、両凹部を丸穴に形成し、一方の前記凹部に嵌入される前記位置決めピンを丸ピンに形成し、他方の前記凹部に嵌入される前記位置決めピンを、丸ピンの周面の少なくとも2箇所を切り落としてなる異形ピンに形成してもよい。
また、前記在席検出部が、載置面よりも上方に突出され、かつ、載置面に没入自在なドグセンサや、前記載置台内部に設けられ、載置面に臨んで垂直上向きに配置される非接触センサであってもよい。
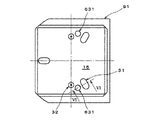
図1に示すように、本実施の形態に係る基板収容容器10は、載置台200上に水平に載置、位置決めされ、その内部に基板Wが収容される。
基板収容容器10は、内部に基板Wの収容空間を有する容器本体11と、容器本体前面(図1中では右面)の開口部12を開閉自在に閉塞する蓋部材13とで主に構成される。また、容器本体11の上面、側面の所定の位置に、容器搬送のためのハンドル14が設けられる。
この基板収容容器10が載置される載置台200は、その載置面201に、載置面201よりも上方に突出させて垂直上向きに設けられる位置決めピン40が2つ、載置面201よりも上方に突出され、かつ、載置面201に没入自在なドグセンサ(在席検出部)41が1つ設けられる。ドグセンサ41の数は少なくとも1つあればよく、特に限定するものではないが、その上限数は突起部31の数と同数とされる。
基板収容容器10を載置台200の所定の位置に載置すると、基板収容容器10の各凹部32におけるピンガイド部321に、載置台200の位置決めピン40がそれぞれ当接される。また、載置台200の各ドグセンサ41に、基板収容容器10の突起部31の平坦面311がそれぞれ当接される。
(第1変形例)
図1に示した本実施形態の基板収容容器10は、容器本体11の底面に、直接、突起部31および凹部32を設け、載置部15としたものであった。
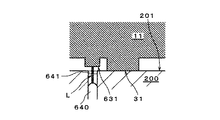
これに対して、図2に示すように、容器本体11の底面に基板収容容器10を水平に支持するスタンド部21を設け、そのスタンド部21の底面22に突起部31および凹部32を設け、第1変形例の基板収容容器としてもよい。
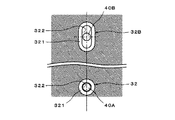
図3に示した本実施形態の基板収容容器10は、容器本体11の底面における左右2箇所(図3中では上下2箇所)に、凹部32を設けたものであった。
これに対して、図9に示すように、容器本体11の底面に、プライマリー(外側)の位置決め、すなわち各突起部31の外側領域9A1および凹部532a(図10参照)と、セカンダリー(内側)の位置決め、すなわち各突起部31の内側領域9A2および凹部532bとを設け、第2変形例の基板収容容器としてもよい。
図3に示した本実施形態の基板収容容器10は、容器本体11の底面における突起部31の外側に、凹部32を設けたものであった。
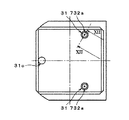
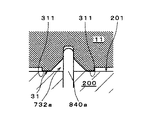
これに対して、図11に示すように、容器本体11の底面における突起部31の平坦面311に、換言すると突起部31の内側に、それぞれ2つの凹部732a,732bを設け、第3変形例の基板収容容器としてもよい。そして、載置台200の、残りの突起部31cの位置と対向する位置に、在席検出センサ(図示せず)が設けられる。
15 載置部
31 突起部
32 凹部
200 載置台
201 載置面
311 平坦面
W 基板
Claims (12)
- 載置台上に水平に載置、位置決めされ、その内部に基板が収容される容器であって、
前記基板収容容器の、前記載置台の載置面に載置される載置部に、先端が前記載置面と平行な平坦面に形成された突起部を少なくとも3つ設けると共に、漏斗状の凹部を少なくとも2つ設け、
前記各突起部の平坦面を前記載置面に当接させ、平面同士を面接触させるようにした
ことを特徴とする基板収容容器。 - 前記突起部は、前記基板収容容器の載置部に、平面上において三角形の頂点を形成する位置関係にて3つ設けられる
請求項1記載の基板収容容器。 - 前記平坦面の少なくとも1つが、容器在席検出のための被在席検出部である
請求項1記載の基板収容容器。 - 前記被在席検出部を構成する前記平坦面は、その他の平坦面よりも突出高さを低く設けた
請求項3記載の基板収容容器。 - 前記基板収容容器は、その本体の底に基板収容容器を水平に支持するスタンド部を有し、そのスタンド部の底部に前記突起部および前記凹部を設けた
請求項1記載の基板収容容器。 - 前記突起部の平坦面の少なくとも2つに、前記凹部を設けた
請求項1記載の基板収容容器。 - 請求項1から6いずれかに記載の基板収容容器と、その基板収容容器が載置される載置台とで構成され、前記基板収容容器を前記載置台上に水平に載置、位置決めする際の位置決め構造であって、
前記載置台に、載置面よりも上方に突出する位置決めピンを少なくとも2つ設けると共に、載置面に在席検出部を少なくとも1つ設け、
前記各突起部の平坦面を前記載置面に当接させ、前記載置台に対する前記基板収容容器の垂直方向の位置決めをし、
前記各凹部内に前記位置決めピンを嵌入させ、前記載置台に対する前記基板収容容器の水平方向の位置決めをし、
前記平坦面の少なくとも1つを前記在席検出部にて検出し、前記基板収容容器の在席を検出する、
ことを特徴とする基板収容容器の位置決め構造。 - 前記載置部に前記凹部を離間して2つ設けると共に、一方の凹部を丸穴に、他方の凹部を長穴に形成し、
丸穴に形成された前記凹部を一方の前記位置決めピンの基準穴とし、長穴に形成された前記凹部を他方の前記位置決めピンの回転拘束穴とした
請求項7記載の基板収容容器の位置決め構造。 - 前記載置部に前記凹部を離間して2つ設けると共に、両凹部を丸穴に形成し、
一方の前記凹部に嵌入される前記位置決めピンを丸ピンに形成し、他方の前記凹部に嵌入される前記位置決めピンを、丸ピンの周面の少なくとも2箇所を切り落としてなる異形ピンに形成した
請求項7記載の基板収容容器の位置決め構造。 - 前記平坦面の少なくとも1つを、その他の平坦面よりも突出高さを低く設けて容器在席検出のための被在席検出部とし、
その少なくとも1つの被在席検出部を前記在席検出部にて検出する
請求項7記載の基板収容容器の位置決め構造。 - 前記在席検出部が、載置面よりも上方に突出され、かつ、載置面に没入自在なドグセンサである
請求項7記載の基板収容容器の位置決め構造。 - 前記在席検出部が、前記載置台内部に設けられ、載置面に臨んで垂直上向きに配置される非接触センサである
請求項7記載の基板収容容器の位置決め構造。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008269215A JP5103596B2 (ja) | 2008-10-17 | 2008-10-17 | 基板収容容器およびその位置決め構造 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008269215A JP5103596B2 (ja) | 2008-10-17 | 2008-10-17 | 基板収容容器およびその位置決め構造 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010098198A true JP2010098198A (ja) | 2010-04-30 |
| JP5103596B2 JP5103596B2 (ja) | 2012-12-19 |
Family
ID=42259662
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008269215A Active JP5103596B2 (ja) | 2008-10-17 | 2008-10-17 | 基板収容容器およびその位置決め構造 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5103596B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010135387A (ja) * | 2008-12-02 | 2010-06-17 | Miraial Kk | ウエハ収納容器 |
| WO2015056317A1 (ja) * | 2013-10-16 | 2015-04-23 | ミライアル株式会社 | 基板収納容器を梱包するための梱包構造体 |
| CN116443730A (zh) * | 2023-06-13 | 2023-07-18 | 上海新创达半导体设备技术有限公司 | 一种辅助天车补偿校正系统及控制方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0541178A (ja) * | 1991-08-07 | 1993-02-19 | Mitsubishi Electric Corp | シヤドウマスク構体用フレームおよびその製造方法ならびにその製造装置 |
| JPH09107019A (ja) * | 1995-10-11 | 1997-04-22 | Tokyo Electron Ltd | 被載置体の位置決め機構 |
| JP2000021966A (ja) * | 1998-07-07 | 2000-01-21 | Shin Etsu Polymer Co Ltd | 精密基板収納容器 |
| JP2001284430A (ja) * | 2000-03-31 | 2001-10-12 | Dainippon Screen Mfg Co Ltd | キャリア載置装置 |
| JP2005064279A (ja) * | 2003-08-14 | 2005-03-10 | Hoya Corp | 基板保持ケース及び基板搬送システム |
| JP2008010574A (ja) * | 2006-06-28 | 2008-01-17 | Vantec Co Ltd | ウエハ容器の位置決め構造 |
-
2008
- 2008-10-17 JP JP2008269215A patent/JP5103596B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0541178A (ja) * | 1991-08-07 | 1993-02-19 | Mitsubishi Electric Corp | シヤドウマスク構体用フレームおよびその製造方法ならびにその製造装置 |
| JPH09107019A (ja) * | 1995-10-11 | 1997-04-22 | Tokyo Electron Ltd | 被載置体の位置決め機構 |
| JP2000021966A (ja) * | 1998-07-07 | 2000-01-21 | Shin Etsu Polymer Co Ltd | 精密基板収納容器 |
| JP2001284430A (ja) * | 2000-03-31 | 2001-10-12 | Dainippon Screen Mfg Co Ltd | キャリア載置装置 |
| JP2005064279A (ja) * | 2003-08-14 | 2005-03-10 | Hoya Corp | 基板保持ケース及び基板搬送システム |
| JP2008010574A (ja) * | 2006-06-28 | 2008-01-17 | Vantec Co Ltd | ウエハ容器の位置決め構造 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010135387A (ja) * | 2008-12-02 | 2010-06-17 | Miraial Kk | ウエハ収納容器 |
| WO2015056317A1 (ja) * | 2013-10-16 | 2015-04-23 | ミライアル株式会社 | 基板収納容器を梱包するための梱包構造体 |
| JPWO2015056317A1 (ja) * | 2013-10-16 | 2017-03-09 | ミライアル株式会社 | 基板収納容器を梱包するための梱包構造体 |
| US9966288B2 (en) | 2013-10-16 | 2018-05-08 | Miraial Co., Ltd. | Structure for fastening together resin members in substrate storing container |
| CN116443730A (zh) * | 2023-06-13 | 2023-07-18 | 上海新创达半导体设备技术有限公司 | 一种辅助天车补偿校正系统及控制方法 |
| CN116443730B (zh) * | 2023-06-13 | 2023-08-25 | 上海新创达半导体设备技术有限公司 | 一种辅助天车补偿校正系统及控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5103596B2 (ja) | 2012-12-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5301731B2 (ja) | 基板収納容器 | |
| JP4472748B2 (ja) | Icキャリア,icソケット及びicデバイスの試験方法 | |
| JP6018075B2 (ja) | ウェーハ収納容器 | |
| TW201802301A (zh) | 基板固持器、電子元件製造裝置中搬送基板之搬送系統、及電子元件製造裝置 | |
| KR20080038042A (ko) | 워크 유지기구 | |
| JP5103596B2 (ja) | 基板収容容器およびその位置決め構造 | |
| JP2011018878A (ja) | 精密基板収納容器およびその製造方法 | |
| TWI634062B (zh) | Substrate storage container | |
| US6573522B2 (en) | Locator pin integrated with sensor for detecting semiconductor substrate carrier | |
| US20240168054A1 (en) | Ic inspection socket | |
| JP2011009304A (ja) | チップトレイ及びチップを移動させる方法 | |
| KR100771703B1 (ko) | 웨이퍼 에지 클램프 티칭지그 | |
| JP5449974B2 (ja) | 精密基板収納容器 | |
| KR20160021136A (ko) | 기판수납용기 | |
| TWI431716B (zh) | A storage box for handling jigs | |
| JP2010040612A (ja) | ウェーハ搬送容器 | |
| JP2009283537A (ja) | 基板収納容器 | |
| KR20200122469A (ko) | 전자부품 테스트용 핸들러의 인서트 및 테스트트레이 | |
| JPWO2016047163A1 (ja) | 基板収納容器 | |
| JP4823094B2 (ja) | ティース体及び基板収納容器 | |
| JPH0869848A (ja) | Icソケット | |
| JP2017083375A (ja) | 電子部品搬送装置および電子部品検査装置 | |
| JP2009272472A (ja) | 基板収納容器 | |
| KR200420740Y1 (ko) | 포토 마스크 전달 박스용 포토 마스크 보관기 | |
| KR200225840Y1 (ko) | 집적회로칩의 테스트보드 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110913 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120802 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120810 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120903 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20120823 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5103596 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151012 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |