以下、本発明による内燃機関の制御装置の各実施形態について図面を参照しつつ説明する。
(第1実施形態)
図1は、本発明の第1実施形態に係る内燃機関の制御装置(以下、「第1制御装置」とも称呼する。)を4サイクル・火花点火式・多気筒(本例では4気筒)・ガソリン燃料・内燃機関10に適用したシステムの概略構成を示している。なお、図1は、特定気筒の断面のみを示しているが、他の気筒も同様な構成を備えている
この内燃機関10は、車両(自動車)に搭載されている。内燃機関10は、シリンダブロック部20と、シリンダヘッド部30と、吸気系統40と、排気系統50と、負圧蓄圧部60と、を含んでいる。
シリンダブロック部20は、図1に部分的に示されたシリンダブロック、図示しないシリンダブロックロワーケース及び図示しないオイルパン等を含んでいる。
シリンダヘッド部30は、シリンダブロック部20の上に固定されている。
吸気系統40は、シリンダブロック部20に混合気(本例では、空気及びガソリン燃料からなる混合気)を供給するようになっている。
排気系統50は、シリンダブロック部20からの排ガスを外部に放出するようになっている。
負圧蓄圧部60は、車両の制動装置の一部を構成する制動倍力装置(ブレーキブースタ)65に負圧を供給するようになっている。
シリンダブロック部20は、シリンダ21、ピストン22、コンロッド23及びクランク軸(出力軸)24を含んでいる。ピストン22はシリンダ21内を往復動するようになっている。ピストン22のこの往復動はコンロッド23を介してクランク軸24に伝達され、これによりクランク軸24が回転するようになっている。シリンダ21、ピストン22の上面及びシリンダヘッド部30の下面は、燃焼室(気筒)25を形成している。
シリンダヘッド部30は、燃焼室25に連通した吸気ポート31、吸気ポート31を開閉する吸気弁32、吸気弁32を駆動するインテークカムシャフトを含むとともにインテークカムシャフトの位相角を連続的に変更する周知の可変吸気タイミング装置33、可変吸気タイミング装置33のアクチュエータ33a、燃焼室25に連通した排気ポート34、排気ポート34を開閉する排気弁35、排気弁35を駆動するエキゾーストカムシャフトを含むとともにエキゾーストカムシャフトの位相角を連続的に変更する周知の可変排気タイミング装置36、可変排気タイミング装置36のアクチュエータ36a、点火プラグ37、点火プラグ37に与える高電圧を発生するイグニッションコイルを含むイグナイタ38及び燃料を吸気ポート31内に噴射することにより燃焼室25内に燃料を供給するインジェクタ(燃料噴射手段)39を備えている。
点火プラグ37は、燃焼室25に露呈された火花発生部にて火花を発生することにより燃焼室25に供給され且つ圧縮された混合気を点火するようになっている。イグナイタ38は、後述する電気制御装置90から送信される点火指示信号に応じて、点火プラグ37に火花を発生させるようになっている。点火プラグ37及びイグナイタ38は点火手段を構成している。
吸気系統40は、各気筒の吸気ポート31にそれぞれ連通する独立した複数の通路を構成する複数の枝部を有するインテークマニホールド41、総てのインテークマニホールド41の枝部が連通するサージタンク42、サージタンク42に一端が接続された吸気ダクト(吸気管)43、吸気ダクト43の他端部から下流(サージタンク42)に向けて順に吸気ダクト43に配設されたエアフィルタ44、スロットル弁45及びスロットル弁駆動手段としてのスロットル弁アクチュエータ45aを備えている。なお、吸気ポート31、インテークマニホールド41、サージタンク42及び吸気ダクト43は、内燃機関10の吸気通路を形成している。
スロットル弁アクチュエータ45aはDCモータからなる。スロットル弁アクチュエータ45aは、電気制御装置90から送信される駆動指示信号に応じて、スロットル弁45を駆動(回動)するようになっている。
排気系統50は、各気筒の排気ポート34にそれぞれ連通する独立した複数の通路及びそれらの通路を下流にて集合させる集合部を構成するエキゾーストマニホールド51、エキゾーストマニホールド51の集合部に接続されたエキゾーストパイプ(排気管)52、エキゾーストパイプ52に配設(介装)された三元触媒53(上流側触媒コンバータ又はスタート・キャタリティック・コンバータとも云うが、以下「第1触媒53」と称呼する。)及び第1触媒53の下流にてエキゾーストパイプ52に配設(介装)された下流側の三元触媒54(車両のフロア下方に配設されるので、アンダ・フロア・キャタリティック・コンバータとも云うが、以下「第2触媒54」と称呼する。)を備えている。なお、排気ポート34、エキゾーストマニホールド51及びエキゾーストパイプ52は、内燃機関10の排気通路を形成している。
第1触媒53及び第2触媒54のそれぞれは、セラミックからなる担持体に「触媒物質である貴金属」及び「セリア(CeO2)」を担持する三元触媒(排気浄化用触媒)である。第1触媒53及び第2触媒54のそれぞれは所定の活性温度に到達すると、「未燃物(HC、CO等)と窒素酸化物(NOx)とを同時に浄化する触媒機能」及び「過剰な酸素を吸蔵し且つ過剰な未燃物にその吸蔵した酸素を供給する酸素吸蔵機能」を発揮する。なお、第1触媒53及び第2触媒54のそれぞれは、活性温度に達すると所定の機能を発揮する他の種類の触媒(例えば、リーンNOx触媒、酸化触媒等)であってもよい。また、以下において、第1触媒53及び第2触媒54の両者を単に「触媒」として称呼することもある。
負圧蓄圧部60は、バイパス管61と、バイパス流量制御弁62と、負圧主供給管63と、負圧副供給管64と、を備えている。この負圧蓄圧部60は、よく知られた「エゼクタシステム」を構成している。
バイパス管61は、その一端がスロットル弁45の上流にて吸気ダクト43に接続されるとともに、その他端がサージタンク42に接続されている。即ち、パイパス管61はスロットル弁45をバイパスする通路(バイパス通路)を構成している。バイパス管61は、上流部61aと、下流部61bと、中央部61cと、からなっている。
上流部61aはバイパス管61の上流側を構成している。上流部61aは一定の通路断面積を有している。上流部61aの一端はスロットル弁45の上流にて吸気ダクト43に連通されている。
下流部61bは、バイパス管61の下流側を構成している。下流部61bは上流部61aと同一の通路断面積を有している。下流部61bの一端はスロットル弁45の下流にてサージタンク42に連通されている。
中央部61cは、その一端が上流部61aの他端と接続され、その他端が下流部61bの他端に接続されている。中央部61cは、上流部61a及び下流部61bの通路断面積よりも小さい通路断面積を有している。
中央部61cには絞り部61c1が形成されている。絞り部61c1は、バイパス管61が形成するパイパス通路の通路断面積が最小となる部分である。中央部61cのうちの絞り部61c1に隣接している部分の通路断面積は、中央部61cの軸方向において絞り部61c1から遠ざかるにつれて徐々に増大している。このような構成により、バイパス管61を空気が通過しているときのバイパス管61内の空気の圧力は、絞り部61c1にて最も小さくなる。
バイパス流量制御弁62は、上流部61aに配設(介装)されている。バイパス流量制御弁62は、電気制御装置90からの開閉指示信号に応じて図示しない弁体を駆動することにより、バイパス管61を連通状態と遮断状態とに切り替えるようになっている。
負圧主供給管63の一端は下流部61bに接続されている。負圧主供給管63の他端はブレーキブースタ65に接続されている。負圧主供給管63の両端部には、ブレーキブースタ65からバイパス管61へ向かって空気が流れることを許容するとともに、その逆向きへ空気が流れることを阻止する逆止弁63a,63bがそれぞれ配設されている。
負圧副供給管64の一端は絞り部61c1に接続されている。負圧副供給管64の他端は負圧主供給管63の中央部であって前記一対の逆止弁63a,63bの間に接続されている。負圧副供給管64には、負圧主供給管63から絞り部61c1へ向かって空気が流れることを許容するとともに、その逆向きへ空気が流れることを阻止する逆止弁64aが配設されている。
車両に搭載されたブレーキブースタ(制動倍力装置)65は一体型真空式であり、その内部に図示しない2つの負圧室を備えている。ブレーキブースタ65は、それらの負圧室内の空気を負圧主供給管63及び負圧副供給管64を介してバイパス管61及びサージタンク42へ排出することにより、大気圧よりも低い圧力(負圧)を有する空気をそれらの負圧室内に蓄えるようになっている。
以上の構成により、サージタンク42内の空気の圧力(スロットル弁下流圧力)が低下すると、ブレーキブースタ65の負圧室内の圧力は、ほとんど遅れることなくスロットル弁下流圧力に一致する。更に、ブレーキブースタ65の負圧室内の圧力は、スロットル弁下流圧力よりも低い圧力である絞り部61c1の空気の圧力に比較的緩慢に近づく。即ち、ブレーキブースタ65の負圧室内の圧力は、常にサージタンク42内の空気の圧力以下の圧力に維持される。
更に、ブレーキブースタ65は、ブレーキペダルBPが運転者によって踏み込まれたとき、一方の負圧室に大気を導入するようになっている。ブレーキブースタ65は、一方の負圧室内の大気圧と、他方の負圧室内の空気の圧力(負圧)と、の差圧を利用することにより、ブレーキペダルBPが踏み込まれる力(ブレーキ操作力)を増大させて車両の制動力を増大させるようになっている。換言すると、ブレーキブースタ65は、前記他方の負圧室内の負圧(負圧の絶対値、負圧の大きさ)が十分に大きくない場合、十分な制動力を発生させるための補助力を発生することができない。
ブレーキペダルBPが踏み込まれると、ブレーキブースタ65によって補助されたブレーキ操作力により図示しないマスタシリンダ圧が上昇する。これによって、車輪WHに設けられたホイールシリンダWC内の圧力である制動油圧が上昇し、それによって図示しない摩擦部材が車輪と一体的に回転するブレーキロータに押し付けられ、車輪に制動力が付与されるようになっている。このように、車両は車輪WHの回転を静止させる制動力を発生するための制動装置を備えている。
なお、本明細書においては、「スロットル弁下流圧力」を「スロットル弁下流負圧」、「インテークマニホールド負圧」又は単に「負圧」と呼ぶ場合がある。「スロットル弁下流負圧(又は負圧)が増大する」ことは、「スロットル弁下流圧力が大気圧に対してより低下する」ことを意味する。「スロットル弁下流負圧(負圧)が減少する」ことは、「スロットル弁下流圧力が上昇して大気圧に近づく」ことを意味する。
一方、このシステムは、熱線式エアフローメータ71、スロットルポジションセンサ72、圧力センサ73、クランクポジションセンサ74、冷却水温センサ75、空燃比センサ76、アクセル開度センサ77、ニュートラルスタートスイッチ78(以下、「NSW78」と称呼する。)、ブレーキスイッチ(ストップランプスイッチ)79、回転センサ(Ncセンサ、回転部材回転検出用センサ)80及び電気制御装置90を備えている。
熱線式エアフローメータ71は、吸気ダクト43内を流れる吸入空気の質量流量を検出し、その質量流量(機関10の単位時間あたりの吸入空気量)Gaを表す信号を出力するようになっている。
スロットルポジションセンサ72は、スロットル弁45の開度(スロットル弁開度)を検出し、スロットル弁開度TAを表す信号を出力するようになっている。
圧力センサ(スロットル弁下流圧力検出センサ)73は、サージタンク42内の吸入空気の圧力(絶対圧)を検出し、その圧力PMを表す信号を出力するようになっている。即ち、圧力センサ73は、吸気通路内であってスロットル弁45よりも下流側に生じる圧力(即ち、スロットル弁下流圧力)を検出するセンサである。
クランクポジションセンサ74は、クランク軸24が10°回転する毎に生じる幅狭のパルスを有するとともにクランク軸24が360°回転する毎に生じる幅広のパルスを有する信号を出力するようになっている。この信号は、電気制御装置90によりエンジン回転速度NEに変換される。なお、電気制御装置90は、図示しないカムポジションセンサからの信号に基づいて、機関10の絶対クランク角を取得するようになっている。
冷却水温センサ75は、シリンダ21に隣接した冷却水通路を循環する冷却水の温度を検出し、冷却水温THWを表す信号を出力するようになっている。
空燃比センサ76は、限界電流式の空燃比センサである。空燃比センサ76は、検出対象ガス(本例では、第1触媒53の上流の排ガス)中の酸素濃度及び燃料の未燃成分(例えば、炭化水素)濃度に基づいて上流側空燃比を検出し、上流側空燃比abyfsを表す信号を出力するようになっている。この上流側空燃比abyfsは機関に供給される混合気の空燃比(以下、「機関の空燃比」とも称呼する。)がリーン側の空燃比になるほど大きくなる。
アクセル開度センサ77は、運転者によって操作されるアクセルペダルAPの操作量を検出し、アクセルペダルAPの操作量(アクセルペダル操作量)Accpを表す信号を出力するようになっている。
NSW78は、車両に搭載された自動変速機(図2を参照。)のシフトレバーの位置がニュートラル位置又はパーキング位置にあるとき「変速機の状態がニュートラル(N)であることを示す信号」を出力し、自動変速機のシフトレバーの位置がドライブ位置又は後退位置等の走行位置(即ち、「ニュートラル位置及びパーキング位置」以外の走行レンヂ)にあるとき「変速機の状態が動力伝達状態(D)であることを示す信号」を出力するようになっている。
ブレーキスイッチ79は、ブレーキペダルBPが踏み込まれているか否か(即ち、制動操作がなされて、制動装置による制動力が車両の車輪WHに付与されているか否か)を示す信号を発生するようになっている。
ところで、図2に示したように、内燃機関10が搭載された車両は、流体式トルクコンバータ110と、自動変速機120と、自動変速機120に供給される油の圧力(油圧)を制御するための油圧制御回路130と、差動歯車装置(ディファレンシャルギヤ)140と、を備えている。
トルクコンバータ110は、機関10が発生する動力を流体(作動油)を介して自動変速機120に伝達する流体式伝達機構111を備えている。この流体式伝達機構111は、ポンプ羽根車111aと、タービン羽根車111bと、図示しないステータ羽根車と、を含んでいる。なお、トルクコンバータ110は、図示しないロックアップクラッチを備えていてもよい。
ポンプ羽根車111aは、図1に示した機関10のクランク軸24と一体的に回転する機関10の出力軸11(即ち、トルクコンバータ入力軸11)に連結されている。
タービン羽根車111bは、ポンプ羽根車111aが発生する作動油の流れにより回転させられるようになっている。タービン羽根車111bは、自動変速機120の入力軸121に連結されている。
自動変速機120は、前進5段後進1段の変速段を達成する周知の変速機である。自動変速機120は、図示しないリングギヤを有する第1列のシングルピニオンプラネタリギヤ、第2列のシングルピニオンプラネタリギヤ及び第3列のシングルピニオンプラネタリギヤを備えている。更に、自動変速機120は、図示しない複数の摩擦クラッチと、図示しない複数の摩擦ブレーキと、を「摩擦係合要素」として備えている。自動変速機120は、これらの摩擦係合要素の係合・解放状態を変更することにより、所定の変速段を達成するようになっている(例えば、特開2003−42284号公報を参照。)。自動変速機120の出力軸122は、車軸141を出力軸として備える差動歯車装置140に接続されている。
油圧制御回路130は、電気制御装置90(図2において省略)からの指示信号に応答して制御される複数(例えば、3個)のオン・オフソレノイドバルブ及び複数(例えば、4個)のリニアソレノイドバルブを含んでいる。油圧制御回路130は、そのオン・オフソレノイドバルブの作動の組み合わせに基づいて自動変速機120の摩擦係合要素に対する油の給排を制御するようになっている。自動変速機120は、そのリニアソレノイドバルブを駆動して自動変速機120に給排される油の圧力(油圧)を調整し得るようになっている。
以上の構成により、機関10の動力(発生トルク)は、機関10の出力軸11、トルクコンバータ110、自動変速機120の入力軸121、自動変速機120内のギヤ及び摩擦係合要素、自動変速機120の出力軸122、差動歯車装置140及び車軸141等を介して駆動輪WHへ伝達されるようになっている。
回転センサ80は、電磁ピックアップ式のセンサである。図1乃至図3に示したように、回転センサ80は、自動変速機120の出力軸122と一体的に回転するロータ123の外周部に対向するように配置されている。ロータ123は、図3に示したように、その外周部に歯123aを複数備えている。即ち、ロータ123はその外周部に凹凸を備えている。歯123aはロータ123の周方向において等間隔に配列されている。従って、歯123aの中央は、出力軸122が所定の単位角度だけ回転する毎に、回転センサ80の中央に対向するようになっている。
これにより、回転センサ80は、図4に示したように、出力軸122(従って、ロータ123)が前記所定角度だけ回転する期間を一周期とするサイン波状の波形信号C1を出力する。その信号C1は電気制御装置90内において所定の閾値Sthと比較され、それにより信号C1はパルス信号PLへと変換される(波形整形される。)。
即ち、回転センサ80及び電気制御装置90は、機関10の出力軸11から出力される機関の動力により回転駆動される部材(回転部材、回転軸部材)であって車両の車輪WHに機関の動力を伝達する部材(自動変速機120の出力軸122)が単位角度だけ回転する毎に、その部材が単位角度だけ回転したことを示す回転信号であるパルス信号PLを生成する回転信号生成手段を構成している。
再び図1を参照すると、電気制御装置90は、互いにバスで接続された「CPU91、CPU91が実行するルーチン(プログラム)、テーブル(ルックアップテーブル、マップ)及び定数等を予め記憶したROM92、CPU91が必要に応じてデータを一時的に格納するRAM93、電源が投入された状態でデータを格納するとともに格納したデータを電源が遮断されている間も保持するバックアップRAM94並びにADコンバータを含むインターフェース95等」を備えたマイクロコンピュータである。
インターフェース95は、前記センサ及び前記スイッチ71〜80と接続され、CPU91にそれらからの信号を供給するようになっている。更に、インターフェース95は、CPU91の指示に応じて可変吸気タイミング装置33のアクチュエータ33a、可変排気タイミング装置36のアクチュエータ36a、各気筒のイグナイタ38、各気筒のインジェクタ39、スロットル弁アクチュエータ45a、バイパス流量制御弁62及び油圧制御回路130(図2を参照。)のオン・オフソレノイドバルブ等に指示信号(駆動指示信号及び点火指示信号等)を送信するようになっている。
<作動の概要>
次に、上記のように構成された第1制御装置の作動の概要について説明する。第1制御装置は、触媒(第1触媒53及び第2触媒54)の暖機を促進する(即ち、これらの触媒の温度を速やかに活性温度に到達させる)制御を行うための「所定の触媒暖機条件」が成立しているか否かを判定する。そして、第1制御装置は、触媒暖機条件が成立していると判定すると、点火時期を触媒暖機条件が成立していないときの点火時期よりも遅角側の「触媒暖機用点火時期」に設定(制御)する。即ち、機関の負荷と機関回転速度とにより定まる基本点火時期(通常時点火時期)を「触媒暖機遅角量」だけ遅角した時期を点火時期に設定する。この点火時期の遅角制御により、排ガス温度が上昇する。その結果、触媒の暖機が促進される。
同時に、第1制御装置は、触媒暖機条件が成立しているときのスロットル弁開度を触媒暖機条件が成立していないときのスロットル弁開度よりも大きい「触媒暖機用スロットル弁開度」に設定(制御)し、機関の吸入空気量を増大させる。
ところで、第1制御装置は、吸気行程直前にある気筒(燃料噴射気筒)に吸入される空気量(筒内吸入空気量Mc)を吸入空気量Ga及び機関回転速度NEに基づいて推定し、その筒内吸入空気量Mcを目標空燃比で除した量の燃料を、燃料噴射気筒に対して設けられているインジェクタ39から噴射するようになっている。従って、スロットル弁開度が「触媒暖機用スロットル弁開度」に設定されることにより吸入空気量が増大すると、機関に供給される混合気量(燃料量及び空気量)も増大する。これにより、第1制御装置は、点火時期を遅角させたことによる機関発生トルクの低下を補償する。即ち、第1制御装置は、触媒暖機条件が成立しているとき、点火時期を遅角するともに機関に供給される混合気量を増大する「触媒暖機制御(触媒暖機促進制御)」を実行する。
本例において、触媒暖機条件は、冷却水温THWが「低側閾値温度THWlo以上」であり且つ「低側閾値温度THWloより高い高側閾値温度THWhi以下」であるときに成立する。即ち、触媒暖機条件は、冷却水温THWが所定の範囲内であるときに成立する。
なお、触媒暖機条件は、以下の暖機条件1乃至暖機条件4が総て成立しているときに成立するように設定されてもよい。
<暖機条件1>機関10が始動された直後の冷却水温THWが低側閾値温度THWlo以上であり且つ高側閾値温度THWhi以下である。
<暖機条件2>機関10の負荷(負荷率KL)が閾値負荷KLth以下である。
<暖機条件3>機関10の始動後の積算吸入空気量SGaが閾値積算吸入空気量SGath以下である。
<暖機条件4>機関10の始動時に初期値に設定され、且つ、機関10の始動後から点火実行毎に徐々に減少させられる触媒暖機遅角量が「0」に到達していない。
更に、第1制御装置は、触媒暖機条件が成立している期間(即ち、触媒暖機遅角量が「0」でない場合であって、点火時期が「触媒暖機条件が成立していない通常期間」よりも遅角されている場合)であっても、所定の暖機制御抑制条件(暖機制御禁止条件、制動装置用の負圧を確保する条件、制動負圧確保条件、負圧増大条件)が成立すると、触媒暖機制御を一時的に中止する。触媒暖機制御を中止するとは、触媒暖機遅角量を小さくすることにより点火時期を通常時の点火時期に近づけるか又は一致させるとともに、スロットル弁開度を通常時のスロットル弁開度に近づけるか又は一致させることを意味する。触媒暖機制御が一時的に中止されると、スロットル弁開度が小さくなるので、スロットル弁下流負圧が増大し(スロットル弁下流圧力が低下し)、制動装置に十分な負圧が供給される。従って、制動装置は十分な制動力を発揮することができる。
暖機制御抑制条件(負圧増大条件)は以下の抑制条件1乃至抑制条件3が総て成立しているときに成立するように設定され得る。
<抑制条件1>スロットル弁開度が微小な閾値開度δ以下である(スロットル弁45が実質的に全閉状態である。)。
<抑制条件2>触媒暖機遅角量が閾値暖機遅角量より大きい。
<抑制条件3>スロットル弁下流圧力PMが閾値圧力PMthより大きい。即ち、スロットル弁下流負圧の大きさが閾値負圧よりも小さい。
<抑制条件4>車両が停止している状態から所定の閾値距離以上移動した。
上記抑制条件4が成立したか否かの判定は、実際には次に述べるように実行される。
第1制御装置は、図4に示したように、回転センサ80の出力信号C1と所定の閾値Sthとを比較することによりパルス信号PLを生成する。更に、第1制御装置は、パルス信号PLの立ち上がりエッヂが発生する毎にカウンタ値CNcを単位量(本例では「1」)だけ増大する(図4の時刻tb及びtdを参照。)。更に、第1制御装置は、パルス信号PLのある立ち上がりエッヂが検出された時点(例えば、図4の時刻tdを参照。)から「停止判定閾値時間TPth」以上が経過しても次の立ち上がりエッヂが到来しないとき、車両が停止していると判定してカウンタ値CNcを初期値(本例においては「0」)に設定(リセット)する(図4の時刻tfを参照。)。
パルス信号PLのある立ち上がりエッヂが検出された時点からその次のパルス信号PLの立ち上がりエッヂが検出される時点までの期間に、車両は出力軸122の単位回転角度に相当する距離だけ移動している。従って、カウンタ値CNcは車両の移動距離を示す。そこで、第1制御装置は、カウンタ値CNcが移動判定値(閾値)Lに到達したとき、車両が停止している状態から所定の閾値距離以上移動したと判定する。
しかしながら、例えば、車輪WHに制動力が付与されて車輪WHが静止している状態において、自動変速機120のシフトレバーの位置がニュートラル位置Nからドライブ位置Dへと変更されることにより自動変速機120の所定の摩擦係合要素が係合を開始すると、自動変速機の出力軸122には機関10の動力(発生トルク)が加わり始めるので、出力軸122には捻れ(回転軸回りの捻れ)が発生する。この結果、車輪WHが回転していない場合であってもロータ123の歯123aの位置が移動するため、パルス信号PLの立ち上がりエッヂ(即ち、出力軸122が単位角度だけ回転したことを示す回転信号)が観測される場合が生じる。このような出力軸122の捻れは振動的であるので、図5の時刻t2〜時刻t3に示したように、パルス信号PLの立ち上がりエッヂが複数発生する場合がある。なお、図5の時刻t1〜時刻t2の期間は、「シフトレバーの位置がニュートラル位置Nからドライブ位置Dへと変更された時点」から「自動変速機120の所定の摩擦係合要素が係合することによってトルク伝達が実質的に開始される時点」までの期間に相当する。
この結果、車両が移動していないにも拘らずカウンタ値CNcが移動判定値Lに到達する場合がある。この場合、実際には車両は停止しているのであるから、制動装置へ供給される負圧を増大する必要がない(大きな制動力を発生させる必要がない)にも拘らず、触媒暖機制御が抑制される。従って、排ガス温度が低下するので、触媒の暖機が遅れる。
このような事態は、図5の時刻t5〜時刻t6に示したように、自動変速機120のシフトレバーの位置がドライブ位置Dからニュートラル位置Nへと変更された場合にも同様に発生する。
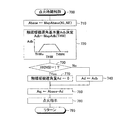
そこで、第1制御装置は、図6に示したように、自動変速機120のシフトレバーの位置がニュートラル位置Nからドライブ位置Dへと変更された時点t1(及び/又は及び自動変速機120のシフトレバーの位置がドライブ位置Dからニュートラル位置Nへと変更された時点)からの経過時間Tndが、N−Dシフト後閾値時間Tndth以上になるまで、移動判定値Lをそれ以外の期間に設定される通常判定値Laよりも所定値αだけ大きい値(La+α)に設定する。これにより、カウンタ値CNcが出力軸122の捻れ振動に起因して増大しても、カウンタ値CNcは移動判定値Lに到達しない。この結果、負圧を増大する必要がないにも拘らず触媒暖機制御が抑制されることを回避することができる。
なお、以下において、自動変速機120のシフトレバーの位置が「ニュートラル位置N又はパーキング位置P」である「N位置」から「1速位置、2速位置、ドライブ位置D及び後退位置R等」である「D位置」へ変更されることを「NDシフト」と称呼する。また、自動変速機120のシフトレバーの位置が「D位置」から「N位置」へ変更されるこを「DNシフト」と称呼する。更に、NDシフト及びDNシフトを「N−Dシフト」と総称する。従って、NDシフトからの経過時間及びDNシフトからの経過時間は「N−Dシフト後時間Tnd」と称呼される。
<実際の作動>
次に、第1制御装置の実際の作動について説明する。電気制御装置90のCPU91は図7にフローチャートにより示した点火時期制御ルーチンを各気筒のクランク角が所定クランク角(例えば、圧縮上死点前90°クランク角、BTDC90°)に一致する毎に繰り返し実行するようになっている。
従って、何れかの気筒のクランク角が所定クランク角に一致すると、CPU91はステップ700から処理を開始してステップ710に進み、負荷(負荷率)KL及び機関回転速度NEと、基本点火時期Abaseと、の関係を規定する基本点火時期テーブルMapAaseに、現時点の負荷KL及び機関回転速度NEを適用することにより、基本点火時期Abaseを決定する。
この基本点火時期テーブルMapAaseによれば、機関10の運転状態がアイドル運転状態でない場合、基本点火時期Abaseは最適点火時期(MBT)となるように決定される。更に、基本点火時期テーブルMapAaseによれば、機関10の運転状態がアイドル運転状態である場合、基本点火時期Abaseは最適点火時期(MBT)よりも僅かだけ遅角側の点火時期となるように決定される。最適点火時期(MBT)とは、機関10が最大のトルクを発生するような点火時期のうちの最小の進角値を有する点火時期のことである。
なお、CPU91は、機関の負荷(負荷率)KLを、下記(1)式に従って求める。この(1)式において、Mcは現時点において吸気行程の直前にある気筒に吸入される筒内吸入空気量である。筒内吸入空気量Mcは、エアフローメータ71により測定される現時点の吸入空気量Gaと、クランクポジションセンサ74により検出される機関回転速度NEと、関数(テーブル)fと、に基づいて算出される。筒内吸入空気量Mcは機関10の吸気通路における空気の挙動をモデル化した周知の空気量推定モデル(空気モデル)を用いて求められてもよい。更に、(1)式において、ρは空気密度(単位は(g/l))、Lは機関10の排気量(単位は(l))、4は機関10の気筒数である。
KL={Mc/(ρ・L/4)}・100(%) …(1)
次に、CPU91はステップ720に進み、冷却水温THWと触媒暖機遅角基本量Adbとの関係を規定するテーブル(暖機遅角基本量テーブル)MapAdbに現時点の冷却水温THWを適用することにより、触媒暖機遅角基本量Adbを決定する。触媒暖機遅角基本量Adbは第1触媒53及び第2触媒54の暖機を促進するための点火時期の遅角量である。点火時期を遅角することにより排ガス温度が高くなるので、第1触媒53及び第2触媒54の温度が速やかに上昇してそれぞれの活性温度に近づく。即ち、触媒の暖機が促進される。
この暖機遅角基本量テーブルMapAdbによれば、機関の冷却水温THWが所定の範囲内(THWlo以上且つTHWhi以下)である場合にのみ触媒暖機遅角基本量Adbが0以外の正の値として設定される。換言すると、機関の冷却水温THWが低側閾値温度THWloよりも小さい場合、及び、冷却水温THWが高側閾値温度THWhiよりも大きい場合、触媒暖機遅角基本量Adbは0に設定される。更に、暖機遅角基本量テーブルMapAdbによれば、触媒暖機遅角基本量Adbは、冷却水温THWが低側閾値温度THWloから次第に高くなるにつれて次第に増大し、その後、冷却水温THWの変化に対して一定となり、更に、冷却水温THWが高側閾値温度THWhiより所定温度だけ低い温度から高側閾値温度THWhiに向かうにつれて「0」に向けて減少するように決定される。
次に、CPU91はステップ730に進み、触媒暖機制御抑制フラグ(負圧増大要求フラグ)XKINSIの値が「1」であるか否かを判定する。この触媒暖機制御抑制フラグXKINSIは、その値が「1」であるとき触媒暖機制御を禁止(又は抑制)すべきときであることを示し、その値が「0」であるとき触媒暖機制御をそのまま続行してもよいことを示す。触媒暖機制御抑制フラグXKINSIの値は、図示しないイグニッション・キー・スイッチがオフからオンに変更されたとき、CPU91が実行する図示しないイニシャルルーチンにおいて「0」に設定されるようになっている。触媒暖機制御抑制フラグXKINSIの値は後述する図9に示したルーチンにより変更されるようになっている。
いま、触媒暖機制御抑制フラグXKINSIの値は「0」であると仮定する。この仮定に従うと、CPU91はステップ730にて「No」と判定してステップ740に進み、触媒暖機遅角量Adに上記ステップ720にて決定された触媒暖機遅角基本量Adbを格納する。
次に、CPU91はステップ750に進み、下記(2)式に従って最終的な点火時期Aigを決定する。即ち、最終点火時期Aigは、基本点火時期Abaseが暖機遅角量Adだけ遅角側に補正された点火時期(基本点火時期Abaseを暖機遅角量Adだけ遅角した点火時期)となる。なお、点火時期は圧縮上死点を基準に、圧縮上死点から吸気下死点に向かって進角するほど正の大きな値をとるように定義される。
Aig=Abase−Ad …(2)
次に、CPU91はステップ760に進み、「現時点におけるクランク角が圧縮上死点前90°となっている気筒」の点火時期が上記ステップ750にて決定された最終点火時期Aigとなるように、その気筒のイグナイタ38及び点火プラグ37に点火指示信号を送出する。
これらの処理により、冷却水温THWが低側閾値温度THWlo以上であり且つ高側閾値温度THWhi以下であって、触媒暖機制御抑制フラグXKINSIの値が「0」であるとき、点火時期は基本点火時期Abaseを触媒暖機遅角基本量Adbだけ遅角した点火時期に設定される。従って、排ガス温度が上昇するので、触媒の温度が速やかに活性温度に近づく。
一方、CPU91は図8にフローチャートにより示したスロットル弁制御ルーチンを所定時間の経過毎に実行している。従って、所定のタイミングになると、CPU91は図8のステップ800から処理を開始してステップ805に進み、現時点の運転状態がアイドル運転状態であるか否かを判定する。より具体的には、CPU91は以下に述べるアイドル運転条件1及びアイドル運転条件2の両条件が共に成立しているとき、現時点の運転状態がアイドル運転状態であると判定する。
(アイドル運転条件1)スロットル弁開度TAが微小開度δ以下である(即ち、スロットル弁45が実質的に全閉状態にある。)。この条件は、アクセルペダル操作量Accpが「0」であることに置換されてもよい。
(アイドル運転条件2)機関回転速度NEが、目標アイドル回転速度基準値NT0に所定値ΔNAを加えた値(NT0+ΔNA)と、目標アイドル回転速度基準値NT0から所定値ΔNAを減算した値(NT0−ΔNA)と、の間の回転数である。所定値ΔNAは正の値である。目標アイドル回転速度基準値NT0は、後述する目標アイドル回転速度NTのうちの機関10が暖機を完了した時点(冷却水温THWが暖機完了温度THWthに到達した時点)以降の目標アイドル回転速度である。
いま、現時点の運転状態がアイドル運転状態でないとすると、CPU91はステップ805にて「No」と判定してステップ810に進み、アクセルペダルの操作量Accpと目標スロットル弁開度TAtgtとの関係を規定したテーブルMapTAtgtに、実際のアクセルペダルの操作量Accpを適用することにより、現時点における目標スロットル弁開度TAtgtを決定する。このテーブルMapTAtgtによれば、アクセルペダルの操作量Accpが大きいほど目標スロットル弁開度TAtgtが大きくなるように目標スロットル弁開度TAtgtが決定される。
次に、CPU91はステップ815に進んでフィードバック補正量TAfbを「0」に設定し、ステップ820に進んで触媒暖機遅角分補正量TAd(以下、単に「暖機補正量TAd」とも称呼する。)を「0」に設定する。次いで、CPU91はステップ825に進み、実際のスロットル弁開度が目標スロットル弁開度TAtgtと一致するようにスロットル弁アクチュエータ45aに駆動指示信号を送出する。この結果、実際のスロットル弁開度はアクセルペダルの操作量Accpが大きいほど大きくなるように制御される。なお、CPU91はステップ820にて決定される暖機補正量TAdを、後述するステップ860のように、触媒暖機遅角量Adが増大するほど増大する値、又は、一定値に設定するとともに、ステップ825にて用いる目標スロットル弁開度TAtgtを「ステップ810にて定められる目標スロットル弁開度TAtgtを暖機補正量TAdだけ増大した値」に設定してもよい。
これに対し、現時点の運転状態がアイドル運転状態であると、CPU91はステップ805にて「Yes」と判定してステップ830に進み、冷却水温THWと目標アイドル回転速度NTとの関係を規定するテーブル(目標アイドル回転速度テーブル)MapNTに実際の冷却水温THWを適用することにより現時点における目標アイドル回転速度NTを決定する。
この目標アイドル回転速度テーブルMapNTによれば、冷却水温THWが暖機完了温度THWth以下であるとき、目標アイドル回転速度NTは冷却水温THWが増大するにつれて減少するように決定される。更に、この目標アイドル回転速度テーブルMapNTによれば、冷却水温THWが暖機完了温度THWthより大きいとき、目標アイドル回転速度NTは冷却水温THWに依らず一定値(目標アイドル回転速度基準値NT0)に設定される。なお、本例の暖機完了温度THWthは前述した高側閾値温度THWhiと等しい温度に設定されているが、高側閾値温度THWhiと相違していてもよい。
次に、CPU91はステップ835に進み、冷却水温THWとスロットル弁基本開度TAbaseとの関係を規定するテーブル(スロットル弁基本開度テーブル)MapTAbaseに実際の冷却水温THWを適用することにより現時点におけるスロットル弁基本開度TAbaseを決定する。スロットル弁基本開度TAbaseは、機関回転速度NEを目標アイドル回転速度NTに一致させるためのスロットル弁開度のフィードフォワード量である。
このスロットル弁基本開度テーブルMapTAbaseによれば、冷却水温THWが暖機完了温度THWth以下であるとき、スロットル弁基本開度TAbaseは冷却水温THWが増大するにつれて減少するように決定される。更に、このスロットル弁基本開度テーブルMapTAbaseによれば、冷却水温THWが暖機完了温度THWthより大きいとき、スロットル弁基本開度TAbaseは冷却水温THWに依らず一定値に設定される。
次に、CPU91はステップ840に進み、現時点の機関回転速度NEが、ステップ830にて決定された目標アイドル回転速度NTから正の所定値ΔNTを減じた回転速度である低側閾値回転速度(NT−ΔNT)より小さいか否かを判定する。この所定値ΔNTは前述した値ΔNAより小さい。値ΔNTは0であってもよい。そして、機関回転速度NEが低側閾値回転速度(NT−ΔNT)より小さいと、CPU91はステップ840にて「Yes」と判定してステップ845に進み、フィードバック補正量TAfbを微小開度変更量ΔTAtだけ大きくする。微小開度変更量ΔTAtの値は正の値である。その後、CPU91はステップ860に進む。
一方、ステップ840の実行時点において、機関回転速度NEが低側閾値回転速度(NT−ΔNT)以上であると、CPU91はステップ840にて「No」と判定してステップ850に進み、機関回転速度NEが「目標アイドル回転速度NTに所定値ΔNTを加えた回転速度である高側閾値回転速度(NT+ΔNT)」より大きいか否かを判定する。そして、機関回転速度NEが高側閾値回転速度(NT+ΔNT)より大きいと、CPU91はステップ850にて「Yes」と判定してステップ855に進み、フィードバック補正量TAfbを微小開度変更量ΔTAtだけ小さくする。その後、CPU91はステップ860に進む。
他方、ステップ850の実行時点において、機関回転速度NEが高側閾値回転速度(NT+ΔNT)以下であると、CPU91はそのステップ850にて「No」と判定し、ステップ860に直接進む。
CPU91はステップ860に進むと、触媒暖機遅角量Adと暖機補正量TAdとの関係を規定するテーブル(暖機補正量テーブル)MapTAdに実際の触媒暖機遅角量Adを適用することにより現時点における暖機補正量TAdを決定する。この暖機補正量TAdは、触媒暖機遅角量Adによって点火時期が遅角されたことに起因する機関10の発生トルクの低下を、スロットル弁開度を増大せしめて機関10に供給される吸入空気量(従って、混合気量)を増大させることにより補償するための補正量である。従って、この暖機補正量テーブルMapTAdによれば、暖機補正量TAdは触媒暖機遅角量Adが「0」であるとき「0」となり、触媒暖機遅角量Adが増大するほど(即ち、点火時期が遅角されるほど)増大するように決定される。
ところで、CPU91は、図示しない燃料噴射制御ルーチンを実行することにより、吸気行程直前にある気筒(燃料噴射気筒)に吸入される空気量(筒内吸入空気量Mc)を吸入空気量Ga及び機関回転速度NEに基づいて推定し、その筒内吸入空気量Mcを目標空燃比で除した量の燃料を、燃料噴射気筒に対して設けられているインジェクタ39から噴射するようになっている。目標空燃比は、冷却水温THWが暖機完了温度THWth以下である場合、理論空燃比よりもリッチ側の空燃比であって且つ冷却水温THWが暖機完了温度THWthに向けて増大するほどリーン側の空燃比となるように(理論空燃比に近づくように)設定される。更に、目標空燃比は、冷却水温THWが暖機完了温度THWthより大きい場合、理論空燃比に設定される。
従って、暖機補正量TAdによりスロットル弁開度が増大されると、筒内吸入空気量Mcが増大し、それにより機関10に供給(噴射)される燃料の量が増大する。即ち、機関に供給される混合気の量が増大する。従って、触媒暖機遅角量Adによって点火時期が遅角されたことに起因する機関10の発生トルクの低下は混合気量の増加に起因する機関10の発生トルクの増大により相殺される。
なお、暖機補正量テーブルMapTAdは、更に、機関回転速度NE及び冷却水温THW等をテーブルの引数として有してもよい。即ち、暖機補正量テーブルMapTAdは、触媒暖機遅角量Adに起因する機関発生トルクの低下分を適切に補う(機関発生トルクが低下しないようにする)ために、スロットル弁開度をどれだけ増大させればよいかを決定するために必要なパラメータ(機関運転状態パラメータ)を引数に有することができる。
次に、CPU91はステップ865に進み、下記(3)式に従って目標スロットル弁開度TAtgtを決定する。
TAtgt=TAbase+TAfb+TAd …(3)
その後、CPU91はステップ825を経由してステップ895に進み、本ルーチンを一旦終了する。この結果、アイドル運転状態において機関回転速度NEが低側閾値回転速度(NT−ΔNT)以上であり且つ高側閾値回転速度(NT+ΔNT)以下となるようにスロットル弁開度がフィードバック制御される。
以上のスロットル弁制御により、機関10の運転状態がアイドル運転状態であって且つ触媒暖機遅角量Adが0でない値に設定されている場合、スロットル弁開度はスロットル弁基本開度TAbaseよりも暖機補正量TAdだけ増大せしめられる。更に、触媒暖機遅角量Adが大きいと機関回転速度NEは比較的大きく低下し、その結果、フィードバック補正量TAfbは増大せしめられる。これらのことから、触媒暖機遅角量Adが0でない場合のスロットル弁開度は触媒暖機遅角量Adが0である場合のスロットル弁開度よりも大きくなる。よって、スロットル弁下流負圧は小さくなり、制動装置(ブレーキブースタ65)に十分な大きさの負圧が供給されていない場合が発生する。
そこで、CPU91は、図9に示した「触媒暖機制御抑制フラグ設定ルーチン(負圧増大要求フラグ設定ルーチン)」を所定時間の経過毎に繰り返し実行し、制動装置へ十分な負圧が供給される必要がある場合(即ち、暖機制御抑制条件が成立する負圧増大要求時)、触媒暖機制御抑制フラグXKINSIの値を「1」に設定する(図9のステップ945を参照。)。それにより、CPU91は、触媒暖機遅角量Adを小さくする(本例では、「0」に設定する。図7のステップ770を参照。)。この結果、スロットル弁開度の暖機補正量TAd(及びフィードバック補正量TAfb)が小さくなるので、スロットル弁下流負圧が大きくなる。
上記「触媒暖機制御抑制条件」は「触媒暖機制御禁止条件」、「負圧増大要求条件」或いは「負圧増大条件」とも称呼され、以下の抑制条件1〜抑制条件4が総て成立したときに成立する。
<抑制条件1>スロットル弁開度TAが微小開度δ以下である。即ち、スロットル弁45が実質的に全閉状態にある。
<抑制条件2>触媒暖機遅角量Adが閾値触媒暖機遅角量Adthより大きい。即ち、触媒暖機制御が実行中であって、且つ、点火時期が触媒暖機遅角量Adにより基本点火時期Abaseに対して比較的大きく遅角側の点火時期に設定されている。
<抑制条件3>スロットル弁下流圧力PMが閾値圧力PMthより大きい。即ち、スロットル弁下流負圧の大きさが閾値負圧よりも小さい。
<抑制条件4>機関10が搭載されている車両が停止している状態から所定距離だけ移動した。即ち、上記カウンタ値CNcが移動判定値Lに到達した。
以下、上記抑制条件1〜3が成立していると仮定して説明を続ける。
所定のタイミングになると、CPU91はステップ900から処理を開始してステップ905に進み、スロットル弁開度TAが微小開度δ以下であるか否かを判定する。即ち、CPU91はスロットル弁45が実質的に全閉状態にあるか否かを判定する。このステップは、アクセルペダル操作量Accpが「0」であるか否かを判定するステップに置換されてもよい。
上述した仮定に従えば、スロットル弁開度TAは微小開度δ以下である。従って、CPU91はステップ905にて「Yes」と判定し、ステップ910に進んで触媒暖機遅角量Adが閾値触媒暖機遅角量Adthより大きいか否かを判定する。上述した仮定に従えば、触媒暖機遅角量Adは閾値触媒暖機遅角量Adthより大きい。従って、CPU91はステップ910にて「Yes」と判定し、ステップ915に進んでスロットル弁下流圧力PMが閾値圧力PMthより大きいか否かを判定する。
上述した仮定に従えば、スロットル弁下流圧力PMは閾値圧力PMthより大きい。従って、CPU91はステップ915にて「Yes」と判定してステップ920に進み、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndth以上であるか否かを判定する。即ち、CPU91は、現時点が自動変速機120の出力軸122(回転軸部材)に発生する捻れにより、車輪WHが回転していないにも拘らず回転信号(パルス信号PLの立ち上がりエッヂ)が生成される可能性がある誤信号発生期間内でないのか、その誤信号発生期間内であるのか否かを判定する。
このとき、CPU91は、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndth以上であれば、ステップ920にて「Yes」と判定してステップ925に進み、移動判定値(閾値)Lを通常判定値Laに設定する(図6の時刻t1以前、及び、時刻t3以降を参照。)。その後、CPU91はステップ935に進む。
これに対し、ステップ920の実行時点において、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndthより短いと、CPU91はそのステップ920にて「No」と判定してステップ930に進み、移動判定値Lを「通常判定値Laよりも正の所定値αだけ大きい値(La+α)」に設定する(図6の時刻t1〜時刻t3を参照。)。その後、CPU91はステップ935に進む。
CPU91はステップ935に進むと、カウンタ値CNcが移動判定値L以上であるか否かを判定する。このカウンタ値CNcは図10に示した「カウンタ値更新ルーチン」により更新されている。ここで、このカウンタ値更新ルーチンについて説明する。
CPU91は、回転センサ80の出力信号を波形整形して得られる上述したパルス信号PLの立ち上がりエッヂ(出力軸122が所定の単位角度だけ回転したことを示す信号)が検出されたとき、図10の「カウンタ値更新ルーチン」の処理をステップ1000から開始する。即ち、このカウンタ値更新ルーチンは「パルス信号PLの立ち上がりエッヂによって起動されるエッヂ割り込みルーチン」である。
次に、CPU91はステップ1010に進み、カウンタ値CNcを単位量である「1」だけ増大する。次いで、CPU91はステップ1020に進み、本ルーチンが前回実行された時点(即ち、前回のパルス信号PLの立ち上がりエッヂ発生時)からの経過時間TPが停止判定閾値時間TPth以上であるか否かを判定する。
このとき、経過時間TPが停止判定閾値時間TPth以上であれば、車両は停止していると判断される。即ち、CPU91はステップ1020にて「Yes」と判定し、ステップ1030に進んでカウンタ値CNcを「0」に設定(リセット)する。その後、CPU91はステップ1095に進み、本ルーチンを一旦終了する。これに対し、ステップ1020の判定時点において、経過時間TPが停止判定閾値時間TPthより小さい(短い)と、CPU91はステップ1020にて「No」と判定し、ステップ1095に直接進んで本ルーチンを一旦終了する。
このように、カウンタ値CNcは、パルス信号PLの立ち上がりエッヂが検出される毎に「1(単位量)」ずつ増大される。更に、カウンタ値CNcは、停止判定閾値時間TPth以上に渡って新たなパルス信号PLの立ち上がりエッヂが検出されないとき、初期値である「0」にリセットされる。
そして、CPU91は、図9のステップ935に進んだとき、上記のように更新されているカウンタ値CNcが移動判定値L以上であれば、そのステップ935にて「Yes」と判定してステップ945に進み、触媒暖機制御抑制フラグXKINSIの値を「1」に設定する。その後、CPU91はステップ995に進んで本ルーチンを一旦終了する。
この結果、CPU91が図7のステップ730に到達したとき、CPU91はそのステップ730にて「Yes」と判定し、ステップ770に進んで触媒暖機遅角量Adを「0」に設定する。これにより、点火時期Aigはそれ以前よりも進角され、基本点火時期Abaseに設定される。また、触媒暖機遅角量Adが「0」に設定されるので、CPU91は図8のステップ860に到達したときに暖機補正量TAdを「0」に設定する。従って、スロットル弁開度がそれ以前よりも小さくなる(スロットル弁基本開度TAbaseに設定される。)から、スロットル弁下流負圧は増大する。その結果、制動装置(ブレーキブースタ65)に十分な大きさの負圧が供給されるから、車両を停止させる際に十分な大きさの制動力を発生させることができる。
一方、図9のステップ935の実行時点において、カウンタ値CNcが移動判定値Lより小さいと、CPU91はステップ935にて「No」と判定してステップ940に進み、触媒暖機制御抑制フラグXKINSIの値を「0」に設定する。その後、CPU91はステップ995に進んで本ルーチンを一旦終了する。この結果、触媒暖機制御が継続して行われる。
なお、CPU91は、上記抑制条件1が不成立であるとき(即ち、スロットル弁開度TAが微小開度δより大きいとき)、図9のステップ905にて「No」と判定してステップ940及びステップ995へと進む。従って、触媒暖機制御抑制フラグXKINSIの値は「0」に設定される。
同様に、CPU91は、上記抑制条件2が不成立であるとき(即ち、触媒暖機遅角量Adが閾値触媒暖機遅角量Adth以下であるとき)、図9のステップ910にて「No」と判定してステップ940及びステップ995へと進む。従って、触媒暖機制御抑制フラグXKINSIの値は「0」に設定される。
同様に、CPU91は、上記抑制条件3が不成立であるとき(即ち、スロットル弁下流圧力PMが閾値圧力PMth以下であるとき)、図9のステップ915にて「No」と判定してステップ940及びステップ995へと進む。従って、触媒暖機制御抑制フラグXKINSIの値は「0」に設定される。
更に、CPU91は図11に示した「触媒暖機制御禁止フラグ解除ルーチン」を所定時間の経過毎に実行している。従って、所定のタイミングになると、CPU71は図11のステップ1100から処理を開始してステップ1110に進み、スロットル弁下流圧力PMが閾値圧力PMthから正の所定値Aを減じた値(PMth−A)以下であるか否かを判定する。そして、CPU91は、スロットル弁下流圧力PMが値(PMth−A)以下であれば、ステップ1120に進んで触媒暖機制御抑制フラグXKINSIの値を「0」に設定し、ステップ1195に進んで本ルーチンを一旦終了する。これに対し、CPU91は、ステップ1110の実行時点において、スロットル弁下流圧力PMが値(PMth−A)より大きいと、そのステップ1110にて「No」と判定し、ステップ1195に直接進んで本ルーチンを一旦終了する。
以上、説明したように、第1制御装置は、車両に搭載されるとともに、吸気通路にスロットル弁45を有し、排気通路に排ガス浄化のための触媒(53、54)を有し、更に、前記吸気通路の前記スロットル弁45の下流に発生する負圧を前記車両の制動装置(制動倍力装置65)に供給するように(負圧蓄圧部60を参照。)構成された内燃機関に適用される。
更に、第1制御装置は、
所定の触媒暖機条件が成立しているときの点火時期を同触媒暖機条件が成立していないときの点火時期よりも遅角側の触媒暖機用点火時期に設定する(図7のステップ720、ステップ740及びステップ750等を参照。)とともに、同触媒暖機条件が成立しているときのスロットル弁開度を同触媒暖機条件が成立していないときのスロットル弁開度よりも大きい触媒暖機用スロットル弁開度に設定する(図8のステップ840〜ステップ865、特に、ステップ860を参照。)ことにより、前記触媒の暖機を促進するための触媒暖機制御を実行する触媒暖機制御手段を備える。
加えて、第1制御装置は、
機関10の出力軸11から出力される機関の動力により回転駆動される部材であって前記車両の車輪WHに同機関の動力を伝達する部材(例えば、自動変速機120の出力軸122)が単位角度だけ回転する毎に同部材が同単位角度だけ回転したことを示す回転信号(パルス信号PLの立ち上がりエッヂ)を生成する回転信号生成手段(回転センサ80、ロータ123及び電気制御装置90)と、
前記回転信号が生成される毎に前記車両の移動距離に応じた値(カウンタ値CNc)を増大する(図10のステップ1010を参照。)とともに同移動距離に応じた値が所定の閾値(移動判定値L)を超えたか否かを判定し(図9のステップ935を参照。)、且つ、その判定の結果を表す移動量関連判定結果(触媒暖機制御抑制フラグ(負圧増大要求フラグ)XKINSI)を生成する(図9のステップ940及びステップ945を参照。)判定結果生成手段と、を備える。
更に、第1制御装置は、
前記触媒暖機制御の実行中、前記移動距離に応じた値(カウンタ値CNc)が前記所定の閾値(移動判定値L)を超えたことを前記移動量関連判定結果が表したとき(触媒暖機制御抑制フラグXKINSIの値が「1」に設定されたとき)、前記機関の点火時期を前記触媒暖機用点火時期よりも進角側の点火時期に設定する(図7のステップ730及びステップ770を参照。)とともに前記スロットル弁開度を前記触媒暖機用スロットル弁開度よりも小さい開度に設定する(図8のステップ860を参照。)ことにより、前記負圧の絶対値を増加させる負圧増大手段を備える。
そして、前記判定結果生成手段は、
現時点が前記部材(自動変速機120の出力軸122)に発生する捻れにより前記車輪WHが回転していないにも拘らず前記回転信号が生成される可能性がある誤信号発生期間内であるか否かを判定する(図9のステップ920を参照。)とともに、現時点が同誤信号発生期間内であると判定した場合、前記回転信号が前記移動量関連判定結果(触媒暖機制御抑制フラグXKINSI)を変化させることがないように同回転信号の同移動量関連判定結果への影響を無効化する(ステップ920及びステップ930を参照。)無効化手段を含む。
即ち、第1制御装置は、誤信号発生期間内である「N−Dシフト後時間TndがN−Dシフト後閾値時間Tndth未満である場合」とき、パルス信号PLのエッヂ(回転信号)が検出されてカウンタ値CNcが増大されても、移動判定値Lを通常時よりも大きい値(La+α)に設定することによって、そのカウンタ値CNcが移動判定値Lに到達しないようにすることにより、パルス信号PLのエッヂ(回転信号)が移動量関連判定結果である触媒暖機制御抑制フラグXKINSIの値を変化させることがないように構成されている。換言すると、第1制御装置は、現時点が前記誤信号発生期間内であると判定した場合、前記所定の閾値(移動判定値L)を、現時点が前記誤信号発生期間内でないと判定している場合の値(La)よりも大きい値(La+α)に設定することにより、前記回転信号の前記移動量関連判定結果への影響を無効化するように構成されている。
この結果、第1制御装置は、制動装置(制動倍力装置65)に大きな負圧が必要である可能性が高い場合(即ち、車両が確実に移動した場合)にのみ暖機遅角量Adを小さくし且つスロットル弁開度を減少させる。従って、第1制御装置は、必要な負圧を制動装置に供給しながらも、触媒の暖機に要する時間が長くなることを回避することができる。
また、第1制御装置は、上述したように、前記回転信号が生成される毎に前記移動距離に応じた値としてのカウンタ値(CNc)を単位量(「1」)だけ増加し且つ同回転信号が所定時間(TPth)以上生成されないとき同カウンタ値を初期値(「0」)に設定する(図10を参照。)とともに、同カウンタ値(CNc)が前記所定の閾値としてのカウンタ閾値(移動判定値L)を超えたか否かを判定し(図9のステップ935を参照。)、その判定の結果に基づいて前記車両が所定距離以上移動したか否かを示す車両移動判定結果(触媒暖機制御抑制フラグXKINSI)を前記移動量関連判定結果として生成するように構成されている(図9のステップ935〜ステップ945を参照。)
このように値が変更されるカウンタ値CNcは、「車両の移動距離」を表す値となる。そして、このカウンタ値CNcが前記所定の閾値としてのカウンタ閾値(移動判定値L)を越えたとき、車両が移動したと判定され、触媒暖機制御が一時的に中止される(即ち、負圧増大制御が実行される)。しかも、第1制御装置は、上述した無効化手段を備えている。従って、車両が移動したことが確実な場合であって、大きな負圧を制動装置に供給しておく必要がある場合にのみ、負圧増大制御を実行することができる。
また、第1制御装置(第1制御装置の無効化手段)は、
(1)「機関10の出力軸(11)と前記部材(出力軸122)との間に介装されるとともに前記機関の動力を同部材に伝達する状態である動力伝達状態と同機関の動力を同部材に伝達しない状態である動力非伝達状態とを達成する動力伝達装置(トルクコンバータ110及び自動変速機120)」の状態が、動力伝達状態から動力非伝達状態へと変化した第1時点(例えば、DNシフト時)を開始時点とし、同第1時点から第1所定期間が経過する時点を終了時点とする期間(第1過渡期間)、及び、
(2)その動力伝達装置の状態が動力非伝達状態から動力伝達状態へと変化した第2時点(例えば、NDシフト時)を開始時点とし、同第2時点から第2所定期間が経過する時点を終了時点とする期間(第2過渡期間)、
のうちの少なくとも一方の期間である過渡期間を、前記誤信号発生期間として定めている(図9のステップ920を参照。)。従って、不必要な負圧増大制御が実行されることを回避することができるので、触媒の暖機が遅れることを回避することができる。なお、上記第1所定期間と上記第2所定期間は同じ期間(時間Tndth)でもよく、互いに相違する期間(時間)であってもよい。
(第2実施形態)
次に、本発明の第2実施形態に係る制御装置(以下、「第2制御装置」とも称呼する。)について説明する。この第2制御装置は、N−Dシフトが連続的に発生した場合、移動判定値LをN−Dシフト発生毎に所定量Δαずつ増大するように構成されている点において第1制御装置と相違している。従って、以下、この相違点を中心として説明を加える。
<作動の概要>
第2制御装置は、図12のタイムチャートに示したように、前回のN−Dシフトが発生してから十分に時間が経過した通常時(即ち、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndth以上である場合)、移動判定値Lを通常判定値Laに設定する(図12の時刻t1以前、及び、時刻t7以降を参照。)。
この状態において、N−Dシフトが発生すると(例えば、図12の時刻t1に示したようにNDシフトが発生すると)、移動判定値Lを通常判定値Laよりも所定値Δαだけ大きい値(La+Δα)に設定する。更に、そのN−Dシフトが発生した時点からのN−Dシフト後時間TndがN−Dシフト後閾値時間Tndthに到達する以前に新たなN−Dシフトが発生すると(例えば、図12の時刻t2に示したようにDNシフトが発生すると)、移動判定値Lを更に所定値Δαだけ大きい値(時刻t2においては、La+2・Δα)に設定する。以降、同様に、最新のN−Dシフトの発生時点からN−Dシフト後閾値時間Tndthが経過する前に次のN−Dシフトが発生すると、第2制御装置は、移動判定値Lを更に所定値Δαだけ増大させる。例えば、図12の時刻t3において移動判定値LはLa+3・Δαに設定され、時刻t4において移動判定値LはLa+4・Δαに設定される。
加えて、第2制御装置は、最新のN−Dシフトの発生時点からのN−Dシフト後時間TndがN−Dシフト後閾値時間Tndthに到達するまでに新たなN−Dシフトが発生しなければ、移動判定値Lを通常判定値Laに戻す(例えば、図12に時刻t7を参照。)。
このように、第2制御装置は、移動判定値LをN−Dシフト毎に増大させる。従って、第2制御装置は、N−Dシフトが連続して行われることによって出力軸122が振動的に捻れ続け、それにより車輪WHが静止しているにも拘らずカウンタ値CNcが連続的に増大する場合であっても、カウンタ値CNcが移動判定値Lに到達することを回避することができる。その結果、第2制御装置は、触媒暖機制御を不必要に中止することを回避することができる。
<実際の作動>
次に、第2制御装置の実際の作動について説明する。第2制御装置のCPU91は図7、図8、図9に代わる図13及び図14、並びに、図11に示したルーチンを実行するようになっている。図7、図8及び図11のルーチンについての説明は既になされている。従って、以下、図13及び図14のルーチンによる処理について説明する。
CPU91は、図13の「触媒暖機制御抑制フラグ設定ルーチン」を所定時間の経過毎に繰り返し実行している。このルーチンは、図9に示したルーチンのステップ930をステップ1310に置換した点のみにおいて図9に示したルーチンと相違している。
即ち、CPU91は、上述した抑制条件1〜抑制条件3が成立している場合、ステップ905乃至ステップ915にて「Yes」と判定してステップ920に進み、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndthに到達していなければ、ステップ1310に進む。そして、CPU91はステップ1310にて移動判定値Lの値をN−Dシフト後過渡期間用判定値Lbに設定する。
更に、第2制御装置のCPU91は、図14にフローチャートにより示した「移動判定値増大ルーチン」を所定時間の経過毎に繰り返し実行するようになっている。従って、所定のタイミングになると、CPU91は図14のステップ1400から処理を開始してステップ1410に進み、現時点が機関10の始動直後であるか否かを判定する。
このとき、現時点が機関10の始動直後であれば、CPU91はステップ1410にて「Yes」と判定してステップ1420に進み「嵩上げ量α」の値を「0」に設定し、その後、ステップ1440に進む。これに対し、ステップ1410の実行時点が始動直後でなければ、CPU91はステップ1410にて「No」と判定してステップ1430に進み、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndth以上であるか否かを判定する。
このとき、CPU91は、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndth以上であれば、そのステップ1430にて「Yes」と判定してステップ1420を経由してステップ1440に進む。更に、CPU91は、ステップ1430の実行時点においてN−Dシフト後時間TndがN−Dシフト後閾値時間Tndthより小さいと、そのステップ1430にて「No」と判定してステップ1440に直接進む。
以上のステップ1410乃至ステップ1430の処理により、機関10が始動直後であるとき、及び、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndthに到達したとき、の何れかの場合、嵩上げ量αの値が「0」に設定される。
CPU91はステップ1440に進んだとき、現時点がNDシフトの直後であるか否かを判定する。そして、CPU91は、現時点がNDシフトの直後であるとステップ1440にて「Yes」と判定してステップ1460に進み、現時点がNDシフトの直後でなければステップ1440にて「No」と判定してステップ1450に進む。
更に、CPU91はステップ1450にて、現時点がDNシフトの直後であるか否かを判定する。そして、CPU91は、現時点がDNシフトの直後であるとステップ1450にて「Yes」と判定してステップ1460に進み、現時点がDNシフトの直後でなければステップ1450にて「No」と判定し、ステップ1495に直接進んで本ルーチンを一旦終了する。
CPU91はステップ1460に進んだとき、嵩上げ量αの値を所定値Δαだけ増大する。次に、CPU91はステップ1470に進み、通常判定値Laに嵩上げ量αを加えた値をN−Dシフト後過渡期間用判定値Lbに格納する。その後、CPU91はステップ1495に進んで本ルーチンを一旦終了する。
以上のステップ1440乃至ステップ1470の処理により、N−Dシフト後過渡期間用判定値Lbは、N−Dシフト発生毎(NDシフト及びDNシフトの何れかが発生した場合)に所定値Δαだけ増大させられる。この結果、図13のステップ920及びステップ1310の処理により、N−Dシフトが行われた時点からのN−Dシフト後時間TndがN−Dシフト後閾値時間Tndthに到達するまでの移動判定値L(=Lb)は、通常判定値Laよりも大きく且つN−Dシフトの発生毎に所定値Δαだけ増大させられる。なお、第2制御装置は、DNシフト及びNDシフトのうちの何れか一方が到来したときにのみ、移動判定値L(=Lb)を所定値Δαずつ増大させるように構成されていてもよい。
以上、説明したように、第2制御装置は、第1制御装置と同様の内燃機関10に適用されるとともに、第1制御装置と同様の触媒暖機制御手段、回転信号生成手段、判定結果生成手段及び負圧増大手段を備える。
更に、第2制御装置(第2制御装置の無効化手段)は、前記第1時点(例えば、DNシフト時)及び前記第2時点(例えば、NDシフト時)のうちの少なくとも一方の時点が到来する毎に前記所定の閾値である移動判定値Lを次第に増大させる(Δαだけ増大させる)ように構成されている。
例えば、制動力が車輪に付与されることによって車両が停止している際、シフトレバーの位置が頻繁に変更され、その結果、自動変速機120等の動力伝達装置の状態が「動力伝達状態から動力非伝達状態へ、又は、その逆へ」頻繁に変化させられる場合において、自動変速機120の出力軸122の捩れ振動が継続するために前述した回転信号が頻繁に発生する。従って、所定の閾値(移動判定値L)が一定であると、車両の移動距離に応じた値(カウンタ値CNc)が継続的に増大して所定の閾値に到達する可能性がある。
これに対し、第2制御装置によれば、前記第1時点及び前記第2時点のうちの少なくとも一方の時点が到来する毎に前記所定の閾値(移動判定値L)が次第に増大するので、前記車両の移動距離に応じた値(カウンタ値CNc)が継続的に増大した場合であっても、その車両の移動距離に応じた値(カウンタ値CNc)を「前記所定の閾値(移動判定値L)」に到達させないようにすることができる。従って、前述した回転信号の移動量関連判定結果(触媒暖機制御抑制フラグXKINSIの値)への影響をより確実に無効化することができる。
(第3実施形態)
次に、本発明の第3実施形態に係る制御装置(以下、「第3制御装置」とも称呼する。)について説明する。この第3制御装置は、暖機制御抑制条件(負圧増大条件)を第1制御装置における暖機制御抑制条件と相違させた点のみにおいて第1制御装置と相違している。従って、以下、この相違点を中心として説明を加える。
第3制御装置が採用する暖機制御抑制条件は以下の抑制条件1及び抑制条件2の両方が成立しているときに成立するように設定されている。
<抑制条件1>エゼクタシステムが作動している。即ち、バイパス流量制御弁62が開弁させられることにより、バイパス管61が連通状態にある(バイパス管61内を空気が通過している)。
<抑制条件2>車両が停止している状態から所定の閾値距離以上移動した。
ところで、一般に、エゼクタシステムは制動倍力装置65の負圧室に与えられる負圧(以下、「ブレーキ負圧」とも称呼する。)が不足する場合に作動させられる。図15は、このエゼクタシステムの効果を表すグラフである。図15のグラフの横軸はスロットル弁下流負圧を表し、縦軸はブレーキ負圧を表している。また、図15の実線J1はエゼクタシステム作動時(バイパス流量制御弁62の開弁時)におけるスロットル弁下流負圧とブレーキ負圧との静的関係を示す。図15の破線H1はエゼクタシステム非作動時(バイパス流量制御弁62の閉弁時)におけるスロットル弁下流負圧とブレーキ負圧との静的関係を示す。
図15から明らかなように、エゼクタシステム作動中のブレーキ負圧(実線J1)はエゼクタシステム非作動中のブレーキ負圧(破線H1)よりも大きくなる。これは、エゼクタシステム作動中、図1に示したバイパス管61の絞り部61c1にスロットル弁下流負圧よりも大きな負圧が発生するからである。いま、十分な制動力を発生するのに必要なブレーキ負圧をブレーキ要求負圧Preqとすると、エゼクタシステムが非作動の場合、スロットル弁下流負圧は例えば約36(kPa)以上でなくてはならない。これに対し、エゼクタシステムが作動中の場合、スロットル弁下流負圧は例えば約20(kPa)以上であればよい。
ところが、例えばブレーキペダルBPが短時間内に繰り返し操作されること(即ち、ポンピングブレーキ操作がなされること)により、ブレーキ負圧が一旦小さくなると、エゼクタシステムはブレーキ負圧を迅速に増大することができない。
図16は、このエゼクタシステムによるブレーキ負圧の増大の遅れを示すグラフである。図16の横軸は時間を表し、図16の縦軸は負圧(スロットル弁下流負圧又はブレーキ負圧)を表す。図16において、実線Iはスロットル弁下流負圧を示し、破線Bはブレーキ負圧を示す。図16に示した例においては、期間T1中にポンピングブレーキ操作がなされた。この結果、ブレーキ負圧は期間T1中に急減した。期間T1の終了後、ブレーキ負圧は増大した。しかしながら、期間T1後のブレーキ負圧が、期間T1前のブレーキ負圧の90%(点P90を参照。)にまで回復するには、相当の時間Tdelayを要している。
図17は、エゼクタシステムの作動中、ポンピングブレーキ操作がなされた場合における、ブレーキ負圧、スロットル弁下流負圧及びブレーキ油圧の変化の様子を、破線B、実線I及び一点鎖線OIによりそれぞれ表すタイムチャートである。図17に示した例においては、一点鎖線OIにより示されているように、ポンピングブレーキ操作によりブレーキ油圧が短時間内に増加及び減少している。破線Bにより示されたブレーキ負圧はこのポンピングブレーキ操作により急減した。そして、楕円ELLにて囲んだ部分に示されているように、エゼクタシステムの作動中であっても、破線Bにより示されたブレーキ負圧はブレーキ要求負圧Preqを下回った。
このように、エゼクタシステムは、低下したブレーキ負圧を直ちに増大させることができない。更に、後述するように、エゼクタシステムはスロットル弁下流負圧が小さいためにブレーキ負圧が不足する可能性が高い場合(エゼクタシステム作動条件成立時)に作動させられる。従って、エゼクタシステム作動中に必要に応じて触媒暖機制御を抑制することは有効である。
そこで、第3制御装置のCPU91は、以下のエゼクタ作動条件1及びエゼクタ作動条件2の何れかが成立したとき(即ち、エゼクタシステム作動条件成立時)、バイパス流量制御弁62を開弁させ、エゼクタシステムを作動させる。
(エゼクタ作動条件1)機関10の始動後から所定時間以内である。
(エゼクタ作動条件2)スロットル弁下流圧力PMが閾値圧力PMthより大きい。即ち、スロットル弁下流負圧の大きさが閾値負圧よりも小さい。
更に、CPU91は、エゼクタシステムの作動中(上記第3制御装置における抑制条件1成立時)、車両が停止している状態から所定の閾値距離以上移動したとき(上記第3制御装置における抑制条件2成立時)、触媒暖機制御を抑制して負圧増大制御を実行する。より具体的に述べると、CPU91は図7、図8、図9に代わる図18、図10、並びに、図11に示したルーチンを実行するようになっている。図7、図8、図10及び図11のルーチンについての説明は既になされている。従って、以下、図18のルーチンによる処理について説明する。
CPU91は、図18の「触媒暖機制御抑制フラグ設定ルーチン」を所定時間の経過毎に繰り返し実行している。このルーチンは、図9に示したルーチンのステップ905乃至ステップ915をステップ1810に置換した点のみにおいて図9に示したルーチンと相違している。
即ち、CPU91は、所定のタイミングになるとステップ1800から処理を開始してステップ1810に進み、現時点においてエゼクタシステムが作動中であるか否かを判定する。このとき、エゼクタシステムが作動中であると、CPU91はステップ1810にて「Yes」と判定し、ステップ920以降の処理を実行する。従って、エゼクタシステム作動中であって(ステップ1810を参照。)、カウンタ値CNcが移動判定値L以上であるとき(ステップ935を参照。)、触媒暖機制御抑制フラグXKINSIの値が「1」に設定される(ステップ945を参照。)。この結果、触媒暖機制御が抑制され、スロットル弁下流負圧が増大せしめられる。
一方、ステップ1810の実行時点においてエゼクタシステムが作動中でなければ、CPU91はステップ1810にて「No」と判定してステップ940に進む。従って、エゼクタシステム非作動中に触媒暖機制御が抑制されることはない。
以上、説明したように、第3制御装置は、第1制御装置と同様の内燃機関10に適用されるとともに、第1制御装置と同様の触媒暖機制御手段、回転信号生成手段、判定結果生成手段及び負圧増大手段を備える。但し、第3制御装置の負圧増大手段は、エゼクタシステムの作動中、車両が停止している状態から所定の閾値距離以上移動したとき、触媒暖機制御を抑制して負圧増大制御を実行する。更に、第3制御装置は、判定結果生成手段は、第1制御装置と同様の無効化手段を含む。従って、第3制御装置は、触媒暖機制御が不必要に中止されないので、触媒の暖機が遅れることを回避することができる。
(第4実施形態)
次に、本発明の第4実施形態に係る制御装置(以下、「第4制御装置」とも称呼する。)について説明する。上述した第1制御装置は、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndth以上になるまで、移動判定値Lをそれ以外の期間に設定される通常判定値(通常値)Laよりも所定値αだけ大きい値(L+α)に設定していた。これに対し、第4制御装置は、移動判定値Lを常に一定値に維持する。一方、第4制御装置は、図19の時刻t1〜t2に示したように、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndth以上になるまで、カウンタ値CNcの更新を禁止する点において第1制御装置と相違している。従って、以下、この相違点を中心として説明を加える。
第4制御装置のCPU91は、図7、図8、図9に代わる図20、図10に代わる図21、並びに、図11に示したルーチンを実行するようになっている。図7、図8及び図11のルーチンについての説明は既になされている。従って、以下、図20及び図21のルーチンによる処理について説明する。
CPU91は、図20の「触媒暖機制御抑制フラグ設定ルーチン」を所定時間の経過毎に繰り返し実行している。このルーチンは、図9に示したルーチンのステップ925及びステップ930を、ステップ2010及びステップ2020にそれぞれ置換した点のみにおいて図9に示したルーチンと相違している。
即ち、CPU91は、所定のタイミングになるとステップ2000から処理を開始する。このとき、下記に再度記載する上述した抑制条件1乃至抑制条件3が総て成立していると、ステップ905乃至ステップ915の各ステップにて「Yes」と判定してステップ920に進む。
<抑制条件1>スロットル弁開度TAが微小開度δ以下である。
<抑制条件2>触媒暖機遅角量Adが閾値触媒暖機遅角量Adthより大きい。
<抑制条件3>スロットル弁下流圧力PMが閾値圧力PMthより大きい。
そして、CPU91は、ステップ920にて、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndth以上であるか否かを判定する。このとき、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndth以上であれば、CPU91はステップ920にて「Yes」と判定してステップ2010に進み、カウント禁止フラグXCUPNGの値を「0」に設定する(図19の時刻t1以前、及び、時刻t2以降を参照。)。なお、カウント禁止フラグXCUPNGの値は、CPU91が実行する図示しないイニシャルルーチンにおいても「0」に設定されるようになっている。その後、CPU91はステップ935に進む。
これに対し、ステップ920の実行時点において、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndthより短いと、CPU91はそのステップ920にて「No」と判定してステップ2020に進み、カウント禁止フラグXCUPNGの値を「1」に設定する(図20の時刻t1〜時刻t2を参照。)。その後、CPU91はステップ935に進む。
そして、CPU91はステップ935に進むと、カウンタ値CNcが移動判定値L以上であるか否かを判定する。このカウンタ値CNcは図21に示した「カウンタ値更新ルーチン」により更新されている。ここで、このカウンタ値更新ルーチンについて説明する。
図21のルーチンは、図10のルーチンに対してステップ2110及びステップ2120を追加した点のみにおいて図10のルーチンと相違している。即ち、CPU91は、上述したパルス信号PLの立ち上がりエッヂが検出されたとき、図20の「カウンタ値更新ルーチン」の処理をステップ2100から開始する。このカウンタ値更新ルーチンは「パルス信号PLの立ち上がりエッヂによって起動されるエッヂ割り込みルーチン」である。
次に、CPU91はステップ2110に進み、カウント禁止フラグXCUPNGの値が「0」であるか否かを判定する。そして、カウント禁止フラグXCUPNGの値が「0」であると、CPU91はステップ2110からステップ2120に進み、カウンタ値CNcを単位量である「1」だけ増大する。次いで、CPU91はステップ1020以降に進んで、本ルーチンが前回実行された時点からの経過時間TPが停止判定閾値時間TPth以上であると、カウンタ値CNcの値を「0」に設定する。
一方、ステップ2110の実行時点において、カウント禁止フラグXCUPNGの値が「1」であると、CPU91はステップ2110にて「No」と判定し、ステップ2110からステップ1020に直接進む。即ち、CPU71は、カウント禁止フラグXCUPNGの値が「1」であると、ステップ2120の処理(カウンタ値CNcの増大処理)を実行しない。
そして、CPU91は、図20のステップ935に進んだとき、上記のように更新されているカウンタ値CNcが移動判定値L以上であれば、そのステップ935にて「Yes」と判定してステップ945に進み、触媒暖機制御抑制フラグXKINSIの値を「1」に設定する。この結果、触媒暖機制御が中止され、負圧増大制御が実行される。その後、CPU91はステップ995に進んで本ルーチンを一旦終了する。
一方、図9のステップ935の実行時点において、カウンタ値CNcが移動判定値Lより小さいと、CPU91はステップ935にて「No」と判定してステップ940に進み、触媒暖機制御抑制フラグXKINSIの値を「0」に設定する。その後、CPU91はステップ995に進んで本ルーチンを一旦終了する。この結果、触媒暖機制御が継続して行われる。
以上、説明したように、第4制御装置は、第1制御装置と同様の内燃機関10に適用されるとともに、第1制御装置と同様の触媒暖機制御手段、回転信号生成手段、判定結果生成手段及び負圧増大手段を備える。
更に、第4制御装置の判定結果生成手段に含まれる無効化手段は、
現時点が前記誤信号発生期間内であると判定した場合(即ち、N−Dシフト後時間TndがN−Dシフト後閾値時間Tndthより短い場合)、回転信号(パルス信号PLの立ち上がりエッヂ)が生成されたときカウンタ値CNcを単位量「1」だけ増加することなく、カウンタ値CNcを回転信号が生成される前後の時点において同じ値に維持する(即ち、カウンタ値CNcの増大処理を禁止する)ことにより、その回転信号の移動量関連判定結果(触媒暖機制御抑制フラグXKINSIの値)への影響を無効化するように構成されている(図20のステップ920及びステップ2020、図21のステップ2110を参照。)。
これによれば、誤信号発生期間(N−Dシフト後時間TndがN−Dシフト後閾値時間Tndthより短い期間)内において、自動変速機120の出力軸122の捩れに起因して前述した回転信号が生成されたとしても、カウンタ値CNcは増加されない。従って、誤信号発生期間内において、カウンタ値CNcは所定の閾値(移動判定値L)に到達しない。その結果、不要な負圧増大制御が実行されないから、触媒の暖機に要する時間が長くなることを回避することができる。なお、第4制御装置において、現時点が誤信号発生期間内にあることは、カウンタ値CNcの増大処理を禁止する「カウント禁止条件」が成立することと同義である。
(第5実施形態)
次に、本発明の第5実施形態に係る制御装置(以下、「第5制御装置」とも称呼する。)について説明する。この第5制御装置は、第4制御装置と同様、移動判定値Lを常に一定値に維持するとともに、カウント禁止条件が成立したとき(即ち、現時点が所定の誤信号発生期間内にあるとき)、カウンタ値CNcの更新を禁止するようになっている。但し、第5制御装置は、そのカウント禁止条件が第4制御装置のカウント禁止条件と相違している。従って、以下、この相違点を中心として説明を加える。
第5制御装置におけるカウント禁止条件は、以下のカウントアップ禁止条件1乃至カウントアップ禁止条件3の総てが成立したときに成立する。
<カウントアップ禁止条件1>シフトレバーの位置が「D位置」である。即ち、自動変速機120の状態が動力伝達状態(D)である。
<カウントアップ禁止条件2>ブレーキペダルBPが踏み込まれている。即ち、制動操作がなされて、制動装置による制動力が車両の車輪WHに付与されている。
<カウントアップ禁止条件3>スロットル弁開度の単位時間あたりの変化量ΔTA(以下、「スロットル弁開度変化量ΔTA」とも称呼する。)がスロットル弁開度変化量閾値ΔTAth以上となってから所定時間Tdtathが経過していない。なお、このカウントアップ禁止条件3は、「スロットル弁45の開度が微小閾値以下から同微小閾値よりも大きい値へと変更された時点から所定時間Tdtathが経過していない。」に置換することもできる。
このカウント禁止条件は、自動変速機120の状態が動力伝達状態であって、ブレーキペダルBPを踏み込まれていて車両が停止しており、且つ、アクセルペダルAPが踏み込まれる場合、即ち、所謂「Dレンジ・ストールでのチップイン操作」がなされたとき及びそのチップイン操作から所定時間Tdtathが経過するまでの期間に成立する。この期間は「チップイン操作過渡期間」とも称呼される。このようなチップイン操作過渡期間においても、N−Dシフト直後と同様、自動変速機120の出力軸122に捻れ(振動的な捻れ)が発生するので、車輪WHが静止しているにも拘らず上述したパルス信号PLの立ち上がりエッヂが観測される場合がある。
従って、第5制御装置は、上記カウント禁止条件が成立したとき、カウンタ値CNcの増大処理を禁止する。この結果、触媒暖機制御が不必要に抑制されることを回避することができる。
より具体的に述べると、第5制御装置のCPU91は、図7、図8、図21及び図22に示したルーチンを実行するようになっている。図7、図8及び図21のルーチンについての説明は既になされている。従って、以下、図22のルーチンによる処理について説明する。なお、図22において図9に示したステップと同一の処理を行うためのステップには、図9のそのようなステップに付された符号と同一の符号が付されている。それらのステップについての詳細な説明は適宜省略される。
CPU91は、図22に示した「触媒暖機制御抑制フラグ設定ルーチン」を所定時間の経過毎に繰り返し実行している。CPU91は以下に再度記載した抑制条件1〜抑制条件4が総て成立したと判定されるとき、触媒暖機制御抑制フラグXKINSIの値を「1」に設定する。
<抑制条件1>スロットル弁開度TAが微小開度δ以下である。
<抑制条件2>触媒暖機遅角量Adが閾値触媒暖機遅角量Adthより大きい。
<抑制条件3>スロットル弁下流圧力PMが閾値圧力PMthより大きい。
<抑制条件4>カウンタ値CNcが移動判定値Lに到達した。
以下、上記抑制条件1〜3が成立していると仮定して説明を続ける。
この場合、CPU91はステップ905、ステップ910及びステップ915の総てのステップにおいて「Yes」と判定し、ステップ2210に進む。CPU91は、ステップ2210にて、シフトレバーの位置がD位置であるか否かをNSW78からの信号に基づいて判定する。即ち、CPU91は上記カウントアップ禁止条件1が成立しているか否かを判定する。
このとき、シフトレバーの位置がD位置であると、CPU91はステップ2210にて「Yes」と判定してステップ2220に進み、ブレーキペダルBPが踏み込まれているか否かをブレーキスイッチ79からの信号に基づいて判定する。即ち、CPU91は上記カウントアップ禁止条件2が成立しているか否かを判定する。
このとき、ブレーキペダルBPが踏み込まれていると、CPU91はステップ2220にて「Yes」と判定してステップ2230に進み、単位時間あたりのスロットル弁開度変化量ΔTAがスロットル弁開度変化量閾値ΔTAth以上であるか否かを判定する。なお、スロットル弁開度変化量ΔTAは、CPU91が所定時間の経過毎に実行する図示しないルーチンにおいて別途計算されている。
いま、加速操作(この場合、チップイン操作)がなされ、スロットル弁開度変化量ΔTAがスロットル弁開度変化量閾値ΔTAth以上であると仮定する。この場合、CPU91はステップ2230にて「Yes」と判定してステップ2240に進み、カウント禁止フラグXCUPNGの値を「1」に設定する。これにより、カウンタ値CNcの増大処理が禁止される(図21のステップ2110を参照。)。
その後、CPU91はステップ935以降の処理を行う。従って、カウンタ値CNcが移動判定値L以上であれば、触媒暖機制御抑制フラグXKINSIの値が「1」に設定される。従って、触媒暖機制御が中止される。これに対し、カウンタ値CNcが移動判定値Lより小さいと、触媒暖機制御抑制フラグXKINSIの値が「0」に設定される。従って、触媒暖機制御が継続して行われる。
一方、ステップ2230の判定時点において、スロットル弁開度変化量ΔTAがスロットル弁開度変化量閾値ΔTAthよりも小さいと、CPU91はそのステップ2230にて「No」と判定してステップ2250に進み、スロットル弁開度変化量ΔTAがスロットル弁開度変化量閾値ΔTAth以上となってからの経過時間Tpassが所定時間Tdtath以上であるか否かを判定する。この場合、経過時間Tpassが所定時間Tdtathより小さいと、CPU91はステップ2250にて「No」と判定し、ステップ2240に進む。従って、この場合においても、カウント禁止フラグXCUPNGの値が「1」に設定されるから、カウンタ値CNcの増大処理が禁止される。
他方、ステップ2250の判定時点において、スロットル弁開度変化量ΔTAがスロットル弁開度変化量閾値ΔTAth以上となってからの経過時間Tpassが所定時間Tdtath以上であると、CPU91はそのステップ2250にて「Yes」と判定してステップ2260に進み、カウント禁止フラグXCUPNGの値を「0」に設定する。従って、この場合、カウンタ値CNcはパルス信号PLの立ち上がりエッヂが発生する毎に「1」だけ増大される(図21のステップ2110及びステップ2120を参照。)。その後、CPU91はステップ935以降の処理を行う。
更に、上述したステップ2210の判定時点において、シフトレバーの位置がD位置でないと(即ち、シフトレバーの位置がN位置であると)、CPU91はそのステップ2210にて「No」と判定してステップ2260へと進む。従って、この場合にも、カウンタ値CNcはパルス信号PLの立ち上がりエッヂが発生する毎に「1」だけ増大される。その後、CPU91はステップ935以降の処理を行う。
同様に、上述したステップ2220の判定時点において、ブレーキペダルBPが踏み込まれていないと、CPU91はそのステップ2220にて「No」と判定してステップ2260へと進む。従って、この場合にも、カウンタ値CNcはパルス信号PLの立ち上がりエッヂが発生する毎に「1」だけ増大される。その後、CPU91はステップ935以降の処理を行う。
加えて、上記抑制条件1が成立していないと、CPU91はステップ905にて「No」と判定してステップ940に進む。上記抑制条件2が成立していないと、CPU91はステップ910にて「No」と判定してステップ940に進む。上記抑制条件3が成立していないと、CPU91はステップ915にて「No」と判定してステップ940に進む。従って、これらの場合、触媒暖機制御抑制フラグXKINSIの値が「0」に設定されるので、触媒暖機制御が中止されることはない。
以上、説明したように、第5制御装置は、第1制御装置と同様の内燃機関10に適用されるとともに、第1制御装置と同様の触媒暖機制御手段、回転信号生成手段、判定結果生成手段及び負圧増大手段を備える。
但し、第5制御装置の判定結果生成手段に含まれる無効化手段は、
「機関10の出力軸11と自動変速機120の出力軸122(回転軸部材)との間に介装されるとともに前記機関10の動力を出力軸122に伝達する状態である動力伝達状態」と「機関10の動力を出力軸122に伝達しない状態である動力非伝達状態」と、を達成する「動力伝達装置(トルクコンバータ110及び自動変速機120)の状態」が動力伝達状態であり、且つ、機関10が搭載された車両の制動装置が前記車輪を静止させる力である制動力を同車輪に付与している状態(例えば、ブレーキペダルBPが踏み込まれている状態)において、
・スロットル弁45の開度が微小閾値以下から同微小閾値よりも大きい値へと変更された時点(即ち、スロットル弁45が実質的に全閉の状態から全閉の状態ではなくなったとき)、又は、
・スロットル弁45の開度の単位時間あたりの増大量ΔTAが閾値増大量ΔTAthを超えた時点、
の何れかの時点を開始時点とするとともに同開始時点から第3所定期間(Tdath)が経過する時点を終了時点とする期間であるチップイン操作過渡期間を、前述した誤信号発生期間として定めている。
また、その無効化手段は、現時点が前記誤信号発生期間(チップイン操作過渡期間)内であると判定した場合、前述の回転信号(パルス信号PLの立ち上がりエッヂ)が生成されたとき、カウンタ値CNcを単位量「1」だけ増加することなく、カウンタ値CNcをその回転信号が生成される前後の時点において同じ値に維持する(即ち、カウンタ値CNcの増大処理を禁止する)ことにより、その回転信号の移動量関連判定結果(触媒暖機制御抑制フラグXKINSIの値)への影響を無効化するように構成されている(図22のステップ2230〜ステップ2250、図21のステップ2110を参照。)。
これによれば、チップイン操作過渡期間である誤信号発生期間内において、自動変速機120の出力軸122の連続的な捩れに起因して回転信号が生成されたとしても、カウンタ値CNcは増加されない。従って、チップイン操作過渡期間において回転信号が生成されたとしても、カウンタ値CNcは所定の閾値である移動判定値Lに到達しない。その結果、不要な負圧増大制御が実行されないから、触媒の暖機に要する時間が長くなることを回避することができる。
以上、説明したように、本発明による内燃機関の制御装置の各実施形態によれば、触媒の暖機制御を、制動装置に負圧を供給する必要が真にある場合にのみ抑制することができる。従って、制動装置に必要な制動力を発生させるとともに触媒の暖機完了時期を早めることができる。
本発明は上記各実施形態に限定されることはなく、本発明の範囲内において種々の変形例を採用することができる。例えば、図22のステップ905乃至ステップ915は、図18のステップ1810(エゼクタシステムが作動中であるか否かを判定するステップ)に置換されてもよい。
更に、第1制御装置のCPU91は、図23に示したルーチンを追加的に実施するように構成されてもよい。これによれば、チップイン操作過渡期間(図23のステップ2210及びステップ2220の両ステップにおいて共に「Yes」と判定され、且つ、ステップ2230及びステップ2250の何れかのステップにて「Yes」と判定されるとき)、移動判定値Lが通常値Laよりも大きい値(La+α)に設定される(図23のステップ930を参照。)。従って、チップイン操作過渡期間において触媒暖機制御が不必要に停止されてしまうことを回避することができる。
更に、上記各実施形態において、触媒暖機制御抑制フラグ(負圧増大要求フラグ)XKINSIの値が「1」に設定されたとき、触媒暖機遅角量Adは「0」に設定されていた(図7のステップ770を参照。)。これに代え、触媒暖機制御抑制フラグ(負圧増大要求フラグ)XKINSIの値が「1」に設定されたとき、触媒暖機遅角量Adの値を0よりも大きく触媒暖機遅角基本量Adbよりも小さい遅角量(例えば、k・Ad、0<k<1)に設定してもよい。即ち、暖機制御実行中であって触媒暖機制御抑制フラグXKINSIの値が「1」に設定されたときの触媒暖機遅角量Adを、触媒暖機制御実行中であって触媒暖機制御抑制フラグXKINSIの値が「0」に設定されているときの触媒暖機遅角量Adよりも小さい値に設定してもよい。
加えて、上記各実施形態において、暖機制御実行中であって触媒暖機制御抑制フラグXKINSIの値が「1」に設定されたとき、触媒暖機遅角量Adを小さくするとともに、エアコンディショナ装置の作動を停止させたり、或いは、エアコンディショナ装置のコンプレッサ回転速度を低下させる等により、機関10に加わる補機負荷の大きさを、触媒暖機制御実行中であって触媒暖機制御抑制フラグXKINSIの値が「0」に設定されている場合よりも小さくしてもよい。これにより、アイドル運転状態中において機関10はより小さい発生トルクを発生すれば、目標アイドル回転速度NTを維持できるので、アイドル回転速度フィードバック制御、及び、エアコンディショナ装置の負荷分を補償するためのスロットル弁の見込み増大量を小さくすること等、によりスロットル弁開度を小さくすることができる。その結果、スロットル弁下流負圧を一層増大させることができる。
また、上記各実施形態において、「車両の移動距離に応じた値」としてカウンタ値CNcが採用されていた。これに対し、或いは、これに加え、車両の移動距離に応じた値として、上述した回転信号(パルス信号PLの立ち上がりエッヂ)に基づいて求められる車両の速度(車速)を採用してもよい。この場合、車速は、連続する二つのパルス信号PLの立ち上がりエッヂ間の時間により求めればよい。また、この場合、移動量関連判定結果を生成するための「前記所定の閾値」は閾値車速に置換すればよい。加えて、上記各実施形態において、回転信号としてパルス信号PLの立ち上がりエッヂが用いられていたが、回転信号としてパルス信号PLの立ち下がりエッヂが用いられてもよい。
更に、上記各実施形態において、機関10の出力軸11から出力される機関の動力により回転駆動される部材(回転部材、回転軸部材)であって車両の車輪WHに機関の動力を伝達する部材(回転センサ80が回転を検出する対象となる部材)は、自動変速機120の出力軸122であった。しかしながら、この部材は、機関の出力を車輪WHに伝達する部材であって、機関出力の変化によって捻れ(回転軸周りの捻れ)を生じる部材であればよく、例えば、車軸141であってもよい。この場合、ロータ123が車軸141に取り付けられ、回転センサ80はそのロータ123の回転を検出するように構成されればよい。
なお、本制御装置は、
機関10の吸気通路内のスロットル弁45の下流にて発生する負圧であるスロットル弁下流負圧を利用することによりブレーキ操作力を増大させて機関10が搭載された車両の制動力を増大させる制動倍力手段と、
所定の駆動指示信号に応じてスロットル弁45を駆動するスロットル弁駆動手段(スロットル弁アクチュエータ45a)と、
所定の点火指示信号に応じて燃焼室25に供給される混合気に点火する点火手段(点火プラグ37及びイグナイタ38)と、
前記機関の排気通路に配設された排ガス浄化用触媒(53,54)と、
前記スロットル弁駆動手段に対して前記駆動指示信号を送信することにより前記スロットル弁の開度を前記機関の運転状態に応じて定まる開度である通常時スロットル弁開度に制御するスロットル弁制御手段(図8のステップ810、又は、ステップ830〜ステップ855を参照。)と、
前記点火手段に対して前記点火指示信号を送信することにより前記点火手段によって前記混合気に点火する点火時期を前記機関の運転状態に応じて定まる時期である通常時点火時期に制御する点火時期制御手段(図7のステップ710を参照。)と、
を備えた内燃機関の制御装置であって、
前記触媒の暖機を促進する触媒暖機要求の有無を判定する(即ち、上記触媒暖機条件が成立したか否かを判定する)とともに、前記スロットル弁下流負圧を増大させる負圧増大要求の有無を判定する(即ち、上記負圧増大条件が成立したか否かを判定する)要求判定手段を備え、
前記スロットル弁制御手段は、
前記触媒暖機要求があり且つ前記負圧増大要求がないと判定されたときに前記スロットル弁の開度を前記運転状態に応じて定まる開度であって同一の運転状態の下で前記通常時スロットル弁開度よりも大きくされる開度である点火遅角実行時スロットル弁開度に制御する(図8のステップ860を参照。)とともに、同触媒暖機要求及び同負圧増大要求のいずれもがあると判定されたときに同スロットル弁の開度を同運転状態に応じて定まる開度であって同一の運転状態の下で同点火遅角実行時スロットル弁開度よりも小さくされる開度である点火遅角抑制時スロットル弁開度に制御する(図7のステップ730、ステップ770及び図8のステップ860を参照。)ように構成され、
前記点火時期制御手段は、
前記触媒暖機要求があり且つ前記負圧増大要求がないと判定されたときに前記点火時期を前記運転状態に応じて定まる時期であって同一の運転状態の下で前記通常時点火時期よりも遅角側の時期である点火遅角実行時点火時期に制御する(図7のステップ720、ステップ730及びステップ740を参照。)とともに、同触媒暖機要求及び同負圧増大要求のいずれもがあると判定されたときに同点火時期を同運転状態に応じて定まる時期であって同一の運転状態の下で同点火遅角実行時点火時期よりも進角側の時期である点火遅角抑制時点火時期に制御する(図7のステップ730及びステップ770を参照。)ように構成され、
た装置である。
そして、前記負圧増大要求の有無を判定する手段は、
前記回転信号を生成する回転信号生成手段と、
前記回転信号が生成される毎に前記車両の移動距離に応じた値を増大するとともに同移動距離に応じた値が所定の閾値を超えたか否かを判定し、且つ、その判定の結果を表す移動量関連判定結果を生成する判定結果生成手段と、
前記移動距離に応じた値が前記所定の閾値を超えたことを前記移動量関連判定結果が表したとき、負圧増大要求が発生したと判定する手段と、
を備えている。
更に、前記判定結果生成手段は、現時点が前記部材に発生する捻れにより前記車輪が回転していないにも拘らず前記回転信号が生成される可能性がある誤信号発生期間内であるか否かを判定するとともに、現時点が同誤信号発生期間内であると判定した場合、前記回転信号が前記移動量関連判定結果を変化させることがないように同回転信号の同移動量関連判定結果への影響を無効化する無効化手段を含むということができる。
また、上記各実施形態に係る制御装置は、誤信号発生期間として、「N−Dシフト後時間TndがN−Dシフト後閾値時間Tndth未満である期間」、或いは、「チップイン操作過渡期間」を検出していた。この場合、「N−Dシフト後時間TndがN−Dシフト後閾値時間Tndth未満である期間」について、ブレーキペダルBPが踏み込まれていることが条件に含まれていても良い。即ち、本願における誤信号発生期間は、車両の速度及び車両の移動距離等の「車両の移動距離に応じた値」を検出するためにその回転が検出される上記回転軸部材の一つの端部が制動力(制動装置)により静止状態に維持され、且つ、その回転軸部材の他端に加わる同回転軸部材を回転させる力の大きさが所定値以上変化してから所定期間が経過するまでの期間」であると言うこともできる。
更に、上記実施形態に係る制御装置は、アイドル運転状態にあるとき、機関回転速度NEが低側閾値回転速度(NT−ΔNT)以上であり且つ高側閾値回転速度(NT+ΔNT)以下となるようにスロットル弁開度をフィードバック制御(アイドル回転速度フィードバック制御)していた。これに対し、本発明による制御装置は、アイドル運転状態にあるとき、アイドル回転速度フィードバック制御を実行しないように構成されてもよい。即ち、図8のステップ830と、ステップ840乃至ステップ855は省略されてもよい。
10…内燃機関、11…機関の出力軸(トルクコンバータ入力軸)、20…シリンダブロック部、21…シリンダ、22…ピストン、23…コンロッド、24…クランク軸、25…燃焼室、30…シリンダヘッド部、31…吸気ポート、32…吸気弁、33…可変吸気タイミング装置、34…排気ポート、35…排気弁、36…可変排気タイミング装置、37…点火プラグ、38…イグナイタ、39…インジェクタ、40…吸気系統、41…インテークマニホールド、42…サージタンク、45…スロットル弁、45a…スロットル弁アクチュエータ、50…排気系統、51…エキゾーストマニホールド、52…エキゾーストパイプ、53…三元触媒、54…三元触媒、60…負圧蓄圧部、61…バイパス管、62…バイパス流量制御弁、63…負圧主供給管、64…負圧副供給管、65…制動倍力装置(ブレーキブースタ)、71…熱線式エアフローメータ、72…スロットルポジションセンサ、73…圧力センサ、74…クランクポジションセンサ、75…冷却水温センサ、76…空燃比センサ、77…アクセル開度センサ、78…ニュートラルスタートスイッチ、79…ブレーキスイッチ、80…回転センサ、90…電気制御装置、110…トルクコンバータ、120…自動変速機、121…自動変速機の入力軸、122…自動変速機の出力軸、123…ロータ、123a…歯、130…油圧制御回路、140…差動歯車装置、141…車軸。