JP2009537384A - 軌道車パラメータを考慮に入れて列車の運行を最適化するシステム、方法、およびコンピュータソフトウェアコード - Google Patents
軌道車パラメータを考慮に入れて列車の運行を最適化するシステム、方法、およびコンピュータソフトウェアコード Download PDFInfo
- Publication number
- JP2009537384A JP2009537384A JP2009511134A JP2009511134A JP2009537384A JP 2009537384 A JP2009537384 A JP 2009537384A JP 2009511134 A JP2009511134 A JP 2009511134A JP 2009511134 A JP2009511134 A JP 2009511134A JP 2009537384 A JP2009537384 A JP 2009537384A
- Authority
- JP
- Japan
- Prior art keywords
- train
- computer software
- rail car
- parameters
- locomotive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 72
- 230000003137 locomotive effect Effects 0.000 claims abstract description 167
- 239000000446 fuel Substances 0.000 claims abstract description 86
- 238000005259 measurement Methods 0.000 claims description 37
- 230000008859 change Effects 0.000 claims description 30
- 238000004891 communication Methods 0.000 claims description 30
- 230000033001 locomotion Effects 0.000 claims description 17
- 238000013480 data collection Methods 0.000 claims description 10
- 239000007788 liquid Substances 0.000 claims description 10
- 238000006073 displacement reaction Methods 0.000 claims description 6
- 238000002360 preparation method Methods 0.000 claims description 4
- 239000003550 marker Substances 0.000 claims 7
- 230000008520 organization Effects 0.000 claims 1
- 238000004904 shortening Methods 0.000 claims 1
- 230000008569 process Effects 0.000 abstract description 10
- 238000005457 optimization Methods 0.000 description 34
- 230000006870 function Effects 0.000 description 29
- 230000033228 biological regulation Effects 0.000 description 16
- 238000004422 calculation algorithm Methods 0.000 description 16
- 238000004364 calculation method Methods 0.000 description 16
- 230000005540 biological transmission Effects 0.000 description 12
- 230000001133 acceleration Effects 0.000 description 8
- 238000012423 maintenance Methods 0.000 description 8
- 238000004458 analytical method Methods 0.000 description 7
- 238000007726 management method Methods 0.000 description 7
- 230000006872 improvement Effects 0.000 description 6
- 238000011068 loading method Methods 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 238000012937 correction Methods 0.000 description 5
- 230000003111 delayed effect Effects 0.000 description 5
- 238000004454 trace mineral analysis Methods 0.000 description 5
- 230000009471 action Effects 0.000 description 4
- 239000000203 mixture Substances 0.000 description 4
- 238000003860 storage Methods 0.000 description 4
- MWUXSHHQAYIFBG-UHFFFAOYSA-N Nitric oxide Chemical compound O=[N] MWUXSHHQAYIFBG-UHFFFAOYSA-N 0.000 description 3
- 238000007792 addition Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 230000001186 cumulative effect Effects 0.000 description 3
- 238000000354 decomposition reaction Methods 0.000 description 3
- 238000003745 diagnosis Methods 0.000 description 3
- 238000009826 distribution Methods 0.000 description 3
- 230000015654 memory Effects 0.000 description 3
- 230000011664 signaling Effects 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 239000004215 Carbon black (E152) Substances 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 239000003086 colorant Substances 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 238000001816 cooling Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000009472 formulation Methods 0.000 description 2
- 229930195733 hydrocarbon Natural products 0.000 description 2
- 150000002430 hydrocarbons Chemical class 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 239000013618 particulate matter Substances 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 238000013528 artificial neural network Methods 0.000 description 1
- 229910002090 carbon oxide Inorganic materials 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 239000000356 contaminant Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000013479 data entry Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000005670 electromagnetic radiation Effects 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000005055 memory storage Effects 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 238000013021 overheating Methods 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000005381 potential energy Methods 0.000 description 1
- 239000000047 product Substances 0.000 description 1
- 230000008707 rearrangement Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images










Classifications
-
- B61L15/0058—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or vehicle train for signalling purposes ; On-board control or communication systems
- B61L15/0018—Communication with or on the vehicle or vehicle train
- B61L15/0027—Radio-based, e.g. using GSM-R
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or vehicle train for signalling purposes ; On-board control or communication systems
- B61L15/0072—On-board train data handling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or vehicle train for signalling purposes ; On-board control or communication systems
- B61L15/0081—On-board diagnosis or maintenance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or vehicle train for signalling purposes ; On-board control or communication systems
- B61L15/009—On-board display devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L25/00—Recording or indicating positions or identities of vehicles or vehicle trains or setting of track apparatus
- B61L25/02—Indicating or recording positions or identities of vehicles or vehicle trains
- B61L25/021—Measuring and recording of train speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/10—Operations, e.g. scheduling or time tables
- B61L27/16—Trackside optimisation of vehicle or vehicle train operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
Abstract
【解決手段】 列車の性能を改善する方法において、列車に含まれる少なくとも1つの軌道車の軌道車パラメータを測定し、当該列車の1または複数の運行基準に従い、軌道車パラメータに基づいて列車走行計画を生成する。
【選択図】 図1
Description

31 列車
33 軌道特性解析要素
34 軌道
36 車載軌道データベース
38 センサ
41 路側位置
42 機関車(構成)
44 プロセッサ
46 アルゴリズム
47 無線通信システム
51 制御要素
52 制動システム
60 運行指令センター
61 機関車データベース
62 実行制御要素
63 機関車モデリング情報データベース
64 燃料比推定部
65 列車パラメータ推定部
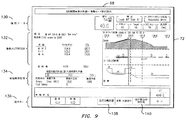
68 ディスプレイ
69 コントロールパネル
200 軌道車
205 車両基地
210 軌道
215 軌道車パラメータ測定システム
220 車載センサ
225 車外センサ
230 データ収集装置
235 送受信機
240 中央制御装置
245 携帯型データ収集装置
250 機関車
255 機関車送受信機
260 路側電子装置
265 ネットワーク
270 プロセッサ
280 軌道車識別子
300 痕跡解析システム
310 国立センター
320 全国データベース
Claims (36)
- 列車の性能を改善する方法において、
a)列車に含まれる少なくとも1つの軌道車の軌道車パラメータを測定し、
b)前記列車の少なくとも1つの運行基準に従い、前記軌道車パラメータに基づいて列車走行計画を生成する
ことを含むことを特徴とする方法。 - 請求項1に記載の方法において、前記軌道車パラメータは、重量、軸荷重、摩擦、風の抵抗、車軸荷重、垂直荷重、および水平荷重のうちの少なくとも1つを含むことを特徴とする方法。
- 請求項1に記載の方法において、前記列車における軌道車の位置を少なくとも1つの軌道車パラメータに基づいて決定することをさらに含むことを特徴とする方法。
- 請求項1に記載の方法において、前記列車の速度対燃料消費および排気出力のうちの少なくとも1つを少なくとも1つの軌道車パラメータに基づいて最適化することをさらに含むことを特徴とする方法。
- 請求項1に記載の方法において、軌道車パラメータデータを遠隔中央データベースに伝達することをさらに含むことを特徴とする方法。
- 請求項5に記載の方法において、前記遠隔中央データベースとの通信を保護することをさらに含むことを特徴とする方法。
- 請求項2に記載の方法において、軸荷重の変化が液体変位および固定貨物の移動のうちの少なくとも1つによるものか否かを判定することをさらに含むことを特徴とする方法。
- 請求項1に記載の方法において、前記列車の操車場準備時間を前記軌道車パラメータに基づいて短縮することをさらに含むことを特徴とする方法。
- 請求項1に記載の方法において、前記列車の軌道車の荷重特性を重量、抵抗、およびカーブ性能のうちの少なくとも1つに基づいて決定することをさらに含むことを特徴とする方法。
- 請求項1に記載の方法において、動力分散型列車および動力非分散型列車のうちの少なくとも1つの操作性能を前記軌道車パラメータに基づいて最適化することをさらに含むことを特徴とする方法。
- 請求項1に記載の方法において、複数の軌道車を提供することをさらに含み、前記列車における前記軌道車の配置順序が前記軌道車パラメータに基づくことを特徴とする方法。
- 請求項1に記載の方法において、前記列車を前記作成した走行計画に基づいて運行することをさらに含むことを特徴とする方法。
- 請求項1に記載の方法において、前記軌道車パラメータを測定するステップは、所定の軌道部位を横切ることによって前記軌道車パラメータを測定することをさらに含むことを特徴とする方法。
- 請求項1に記載の方法において、前記軌道車に付随する識別タグに含まれた情報を読み取ることにより、軌道車データを決定することをさらに含むことを特徴とする方法。
- 列車の性能を改善するプロセッサ用のコンピュータソフトウェアコードにおいて、
a)前記列車の少なくとも1つの軌道車の軌道車パラメータを測定するコンピュータソフトウェアモジュールと、
b)前記列車の少なくとも1つの運行基準に従い、前記軌道車パラメータに基づいて列車走行計画を生成するコンピュータソフトウェアモジュールと、
を備えることを特徴とするコンピュータソフトウェアコード。 - 請求項15に記載のコンピュータソフトウェアコードにおいて、前記軌道車パラメータは、重量、軸荷重、摩擦、風の抵抗、車軸荷重、垂直荷重、および水平荷重のうちの少なくとも1つを含むことを特徴とするコンピュータソフトウェアコード。
- 請求項15に記載のコンピュータソフトウェアコードにおいて、前記列車における軌道車の位置を少なくとも1つの軌道車パラメータに基づいて決定するコンピュータソフトウェアモジュールをさらに備えることを特徴とするコンピュータソフトウェアコード。
- 請求項15に記載のコンピュータソフトウェアコードにおいて、前記列車の速度対燃料消費および排気出力のうちの少なくとも1つを前記軌道車パラメータに基づいて最適化するコンピュータソフトウェアモジュールをさらに備えることを特徴とするコンピュータソフトウェアコード。
- 請求項15に記載のコンピュータソフトウェアコードにおいて、軌道車パラメータデータを遠隔中央データベースに伝達するコンピュータソフトウェアモジュールをさらに備えることを特徴とするコンピュータソフトウェアコード。
- 請求項19に記載のコンピュータソフトウェアコードにおいて、前記遠隔中央データベースとの通信を保護するコンピュータソフトウェアモジュールをさらに備えることを特徴とするコンピュータソフトウェアコード。
- 請求項16に記載のコンピュータソフトウェアコードにおいて、軸荷重の変化が前記軌道車における液体変位および固定貨物の移動のうちの少なくとも1つによるものか否かを判定するコンピュータソフトウェアモジュールをさらに備えることを特徴とするコンピュータソフトウェアコード。
- 請求項15に記載のコンピュータソフトウェアコードにおいて、前記列車の軌道車の荷重特性を重量、抵抗、およびカーブ性能のうちの少なくとも1つに基づいて決定するコンピュータソフトウェアモジュールをさらに備えることを特徴とするコンピュータソフトウェアコード。
- 請求項15に記載のコンピュータソフトウェアコードにおいて、動力分散型列車および動力非分散型列車のうちの少なくとも1つの操作性能を前記軌道車パラメータに基づいて最適化するコンピュータソフトウェアモジュールをさらに備えることを特徴とするコンピュータソフトウェアコード。
- 請求項15に記載のコンピュータソフトウェアコードにおいて、複数の軌道車を提供するコンピュータソフトウェアモジュールをさらに備え、前記コンピュータソフトウェアモジュールは、前記列車における前記軌道車の順序を前記軌道車パラメータに基づいて決定することを特徴とするコンピュータソフトウェアコード。
- 請求項15に記載のコンピュータソフトウェアコードにおいて、前記列車を前記作成した走行計画に基づいて運行するコンピュータソフトウェアモジュールをさらに備えることを特徴とするコンピュータソフトウェアコード。
- 請求項15に記載のコンピュータソフトウェアコードにおいて、前記軌道車に付随する識別タグに含まれた情報を読み取ることにより、軌道車データを決定するコンピュータソフトウェアモジュールをさらに備えることを特徴とするコンピュータソフトウェアコード。
- 軌道車パラメータを測定することにより列車の性能を改善するシステムにおいて、
a)軌道車パラメータ測定システムと、
b)中央制御装置と、
c)前記測定システムと前記中央制御装置間の通信を可能にする通信ネットワークと、を備え、
d)軌道車パラメータの測定および前記中央制御装置への提供を行って、前記列車の全軌道車に対する列車編成プロファイルおよび列車の任務に応じた走行計画のうちの少なくとも1つを前記軌道車パラメータに基づいて決定することを特徴とするシステム。 - 請求項27に記載のシステムにおいて、前記パラメータ測定システムは、軌道車パラメータを測定する車載センサおよび車外センサのうちの少なくとも1つをさらに備えることを特徴とするシステム。
- 請求項28に記載のシステムにおいて、前記車載センサおよび車外センサは、重量、軸荷重、摩擦、風の抵抗、車軸荷重、垂直荷重、および水平荷重のうちの少なくとも1つを測定することを特徴とするシステム。
- 請求項27に記載のシステムにおいて、遠隔データベースおよび携帯型データ収集装置のうちの少なくとも1つをさらに備えることを特徴とするシステム。
- 請求項27に記載のシステムにおいて、前記通信ネットワークは、前記測定システム、中央制御装置、遠隔データベース、携帯型データ収集装置、路側装置、車外センサ、および機関車のうちの少なくとも2つの要素間の通信を提供することを特徴とするシステム。
- 請求項30に記載のシステムにおいて、前記通信ネットワークは、保護された通信ネットワークであることを特徴とするシステム。
- 請求項27に記載のシステムにおいて、前記中央制御装置は、プロセッサをさらに備えることを特徴とするシステム。
- 請求項30に記載のシステムにおいて、前記遠隔データベースは、複数の軌道車の軌道車パラメータデータを備えることを特徴とするシステム。
- 請求項27に記載のシステムにおいて、
a)軌道車に付随する識別マーカと、
b)前記軌道車が前記マーカと通信して前記マーカから情報を収集する軌道に近接配置された識別マーカ読取機と、をさらに備え
c)前記中央制御装置が前記識別マーカ読取機と通信するとともに、前記識別マーカに関連する情報を用いて前記軌道車の特性を決定することを特徴とするシステム。 - 請求項35に記載のシステムにおいて、前記識別マーカに関連する情報は、走行計画の決定に用いる走行最適化器に提供されることを特徴とするシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US80214706P | 2006-05-19 | 2006-05-19 | |
| US11/621,221 US8473127B2 (en) | 2006-03-20 | 2007-01-09 | System, method and computer software code for optimizing train operations considering rail car parameters |
| PCT/US2007/066697 WO2007136947A2 (en) | 2006-05-19 | 2007-04-16 | System, method and computer software code for optimizing train opeations considering rail car parameters |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012034736A Division JP2012136217A (ja) | 2006-05-19 | 2012-02-21 | 軌道車パラメータを考慮に入れて列車の運行を最適化する方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009537384A true JP2009537384A (ja) | 2009-10-29 |
| JP2009537384A5 JP2009537384A5 (ja) | 2010-05-27 |
Family
ID=38462307
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009511134A Pending JP2009537384A (ja) | 2006-05-19 | 2007-04-16 | 軌道車パラメータを考慮に入れて列車の運行を最適化するシステム、方法、およびコンピュータソフトウェアコード |
| JP2012034736A Pending JP2012136217A (ja) | 2006-05-19 | 2012-02-21 | 軌道車パラメータを考慮に入れて列車の運行を最適化する方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012034736A Pending JP2012136217A (ja) | 2006-05-19 | 2012-02-21 | 軌道車パラメータを考慮に入れて列車の運行を最適化する方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US8473127B2 (ja) |
| EP (1) | EP2024217A2 (ja) |
| JP (2) | JP2009537384A (ja) |
| AU (1) | AU2007253963A1 (ja) |
| BR (1) | BRPI0706036A2 (ja) |
| CA (1) | CA2622726A1 (ja) |
| RU (2) | RU2605648C2 (ja) |
| WO (1) | WO2007136947A2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9603480B2 (en) | 2008-12-03 | 2017-03-28 | Koninklijke Douwe Egberts B.V. | System, package, apparatus and method for dosing coffee beans |
| WO2020194485A1 (ja) * | 2019-03-26 | 2020-10-01 | 三菱電機株式会社 | データ収集装置およびデータ収集方法 |
Families Citing this family (77)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10569792B2 (en) | 2006-03-20 | 2020-02-25 | General Electric Company | Vehicle control system and method |
| US10308265B2 (en) | 2006-03-20 | 2019-06-04 | Ge Global Sourcing Llc | Vehicle control system and method |
| US9733625B2 (en) | 2006-03-20 | 2017-08-15 | General Electric Company | Trip optimization system and method for a train |
| US9950722B2 (en) | 2003-01-06 | 2018-04-24 | General Electric Company | System and method for vehicle control |
| US9689681B2 (en) | 2014-08-12 | 2017-06-27 | General Electric Company | System and method for vehicle operation |
| US9828010B2 (en) | 2006-03-20 | 2017-11-28 | General Electric Company | System, method and computer software code for determining a mission plan for a powered system using signal aspect information |
| US9229448B1 (en) | 2014-09-19 | 2016-01-05 | General Electric Company | Energy management system and method for vehicle systems |
| US20120123617A1 (en) * | 2010-11-17 | 2012-05-17 | Joseph Forrest Noffsinger | Methods and systems for data communications |
| US9637147B2 (en) | 2009-03-17 | 2017-05-02 | General Electronic Company | Data communication system and method |
| US9379775B2 (en) | 2009-03-17 | 2016-06-28 | General Electric Company | Data communication system and method |
| US20080288318A1 (en) * | 2007-04-17 | 2008-11-20 | Smart Tram Corp. | Smart tram system and method for using |
| US9073562B2 (en) * | 2007-10-12 | 2015-07-07 | General Electric Company | System and method for a simulation based movement planner |
| US8140203B2 (en) * | 2008-04-08 | 2012-03-20 | General Electric Company | Method for controlling vehicle operation incorporating quick clearing function |
| US8285429B2 (en) * | 2008-04-28 | 2012-10-09 | General Electric Company | Automatic estimation of train characteristics |
| US8380361B2 (en) * | 2008-06-16 | 2013-02-19 | General Electric Company | System, method, and computer readable memory medium for remotely controlling the movement of a series of connected vehicles |
| US8271153B2 (en) * | 2008-09-11 | 2012-09-18 | General Electric Company | System, method and computer readable memory medium for verifying track database information |
| US8219268B2 (en) * | 2008-11-24 | 2012-07-10 | General Electric Company | Apparatus and method for determining available power and weight distribution in a train |
| US9834237B2 (en) | 2012-11-21 | 2017-12-05 | General Electric Company | Route examining system and method |
| US9623884B2 (en) * | 2009-11-13 | 2017-04-18 | General Electric Company | Method and system for independent control of vehicle |
| DE102009053457A1 (de) * | 2009-11-16 | 2011-05-19 | Siemens Aktiengesellschaft | Bedieneinrichtung und Verfahren zu deren Betrieb |
| AU2011305691A1 (en) | 2010-09-21 | 2013-04-11 | Ansaldo Sts Usa, Inc. | Method for adjusting braking parameters of a train to account for train characteristic parameter variations |
| US10144440B2 (en) | 2010-11-17 | 2018-12-04 | General Electric Company | Methods and systems for data communications |
| US9513630B2 (en) | 2010-11-17 | 2016-12-06 | General Electric Company | Methods and systems for data communications |
| US20120130562A1 (en) * | 2010-11-19 | 2012-05-24 | General Electric Company | Data communication system for a rail vehicle and method for communicating data with a rail vehicle |
| US20120130568A1 (en) * | 2010-11-19 | 2012-05-24 | General Electric Company | Data communication system for a rail vehicle consist and method for communicating data with a rail vehicle consist |
| US9268882B2 (en) | 2011-01-20 | 2016-02-23 | Paccar Inc | System and method for analyzing a powertrain configuration |
| US8386091B2 (en) * | 2011-05-09 | 2013-02-26 | Ford Global Technologies, Llc | Methods and apparatus for dynamic powertrain management |
| US8655519B2 (en) * | 2011-07-14 | 2014-02-18 | General Elecric Company | Rail vehicle consist speed control system and method |
| US20130116865A1 (en) * | 2011-11-03 | 2013-05-09 | Jared COOPER | System and method for changing when a vehicle enters a vehicle yard |
| US8521345B2 (en) * | 2011-12-28 | 2013-08-27 | General Electric Company | System and method for rail vehicle time synchronization |
| US9020743B2 (en) | 2012-02-20 | 2015-04-28 | Ford Global Technologies, Llc | Methods and apparatus for predicting a driver destination |
| US8594865B1 (en) * | 2012-05-17 | 2013-11-26 | New York Air Brake Corporation | Train control system |
| JP5944229B2 (ja) * | 2012-05-30 | 2016-07-05 | 株式会社東芝 | 列車制御装置 |
| US8838304B2 (en) * | 2012-06-29 | 2014-09-16 | Mitsubishi Electric Research Laboratories, Inc | Method for determining run-curves for vehicles based on travel time |
| US8660723B2 (en) * | 2012-06-29 | 2014-02-25 | Mitsubishi Electric Research Laboratories, Inc. | Method for determining run-curves for vehicles in real-time subject to dynamic travel time and speed limit constraint |
| US8930126B2 (en) * | 2012-08-31 | 2015-01-06 | General Electric Company | Systems and methods for fuel consumption analysis |
| US9469310B2 (en) | 2012-10-18 | 2016-10-18 | Wabtec Holding Corp. | System, apparatus, and method for automatically controlling a locomotive |
| US9669851B2 (en) | 2012-11-21 | 2017-06-06 | General Electric Company | Route examination system and method |
| KR102037036B1 (ko) * | 2013-04-11 | 2019-10-28 | 현대모비스 주식회사 | 자동주행 제어시스템 |
| US8948940B2 (en) | 2013-05-06 | 2015-02-03 | General Electric Company | Method and system for controlling energy demand of vehicles on a network |
| US9307410B2 (en) | 2013-05-16 | 2016-04-05 | Myine Electronics, Inc. | System and method for controlled wireless unlocking of applications stored on a vehicle electronics system |
| US9150209B2 (en) | 2013-07-22 | 2015-10-06 | General Electric Company | System and method for monitoring braking effort |
| JP6305238B2 (ja) * | 2013-10-25 | 2018-04-04 | 三菱電機株式会社 | 走行曲線作成装置および走行支援装置 |
| US20150149003A1 (en) * | 2013-11-22 | 2015-05-28 | Electro-Motive Diesel, Inc. | Control system for fuel tender of locomotive |
| US10532755B2 (en) | 2014-03-27 | 2020-01-14 | Ge Global Sourcing Llc | Control system and method for a transportation network |
| EA034827B1 (ru) * | 2014-07-08 | 2020-03-25 | Рэйл-Вэйор Текнолоджис Глобал Инк. | Система управления усовершенствованной рельсовой транспортной системой для перевозки насыпных грузов |
| US9227639B1 (en) | 2014-07-09 | 2016-01-05 | General Electric Company | System and method for decoupling a vehicle system |
| US10421471B2 (en) * | 2014-09-22 | 2019-09-24 | Ge Global Sourcing Llc | Power assignment system and method for forming vehicle systems |
| DE102014221964A1 (de) | 2014-10-28 | 2016-04-28 | Siemens Aktiengesellschaft | Verfahren zum Betreiben eines Fahrzeugs |
| GB2532760A (en) | 2014-11-27 | 2016-06-01 | Skf Ab | Condition monitoring system, condition monitoring unit and method for monitoring a condition of a bearing unit for a vehicle |
| EP3251917B1 (en) * | 2015-01-27 | 2023-11-15 | Mitsubishi Electric Corporation | Train information management system and train information management method |
| US9862397B2 (en) * | 2015-03-04 | 2018-01-09 | General Electric Company | System and method for controlling a vehicle system to achieve different objectives during a trip |
| US9701323B2 (en) | 2015-04-06 | 2017-07-11 | Bedloe Industries Llc | Railcar coupler |
| WO2016181536A1 (ja) * | 2015-05-13 | 2016-11-17 | 三菱電機株式会社 | 列車内伝送制御システム及び中継装置 |
| US10654500B2 (en) * | 2015-06-12 | 2020-05-19 | Westinghouse Air Brake Technologies Corporation | Arrival time and location targeting system and method |
| EA037237B1 (ru) * | 2016-03-02 | 2021-02-25 | Дженерал Электрик Компани | Система и способ управления системой транспортных средств для достижения различных целей во время рейса |
| CA3027360C (en) * | 2016-06-13 | 2022-04-12 | Siemens Industry, Inc. | System and method for train route optimization including machine learning system |
| US10279823B2 (en) * | 2016-08-08 | 2019-05-07 | General Electric Company | System for controlling or monitoring a vehicle system along a route |
| US10650621B1 (en) | 2016-09-13 | 2020-05-12 | Iocurrents, Inc. | Interfacing with a vehicular controller area network |
| US11338829B2 (en) | 2016-10-26 | 2022-05-24 | Transportation Ip Holdings, Llc | Oil carryover reduction system |
| US10557430B2 (en) | 2016-10-26 | 2020-02-11 | Ge Global Sourcing Llc | Oil carryover reduction system |
| WO2018138923A1 (ja) * | 2017-01-30 | 2018-08-02 | 三菱電機株式会社 | 表示装置および車上情報表示方法 |
| JP6867826B2 (ja) * | 2017-02-23 | 2021-05-12 | 三菱重工エンジニアリング株式会社 | 異常監視装置、異常監視方法およびプログラム |
| US11002556B2 (en) | 2017-03-29 | 2021-05-11 | Transportation Ip Holdings, Llc | System and method for arranging transportation systems for travel |
| DE102017212499A1 (de) * | 2017-07-20 | 2019-01-24 | Siemens Aktiengesellschaft | Steuerverfahren und Steuereinrichtung zum Betreiben eines Schienenfahrzeugs |
| CN109318716B (zh) * | 2017-12-20 | 2020-01-10 | 中车长春轨道客车股份有限公司 | 一种牵引电机轴温监测报警控制方法、系统及相关装置 |
| CN110967012B (zh) * | 2018-09-30 | 2022-11-08 | 北京京东振世信息技术有限公司 | 路径规划方法及系统、计算机系统和计算机可读存储介质 |
| CN109398423A (zh) * | 2018-12-10 | 2019-03-01 | 马鞍山市雷狮轨道交通装备有限公司 | 一种轨道交通车轮身份和装车位置在线动态识别系统及识别方法 |
| WO2021035149A1 (en) * | 2019-08-21 | 2021-02-25 | Amsted Rail Company, Inc. | Systems and methods for monitoring brake systems on railway assets |
| RU2757005C2 (ru) * | 2019-12-27 | 2021-10-08 | Владимир Семенович Потапенко | Способ диагностики технического состояния экипажной части локомотива |
| RU2757004C2 (ru) * | 2019-12-27 | 2021-10-08 | Владимир Семенович Потапенко | Способ диагностики технического состояния пассажирского вагона |
| EP4008605A1 (en) * | 2020-12-04 | 2022-06-08 | Siemens Mobility GmbH | Method and device for diagnosing a railroad switch with a point machine |
| CZ309568B6 (cs) * | 2021-01-14 | 2023-04-19 | ŠKODA ELECTRIC a.s | Způsob regulace a omezení rychlosti a řízení zrychlení elektrických pozemních vozidel |
| CN114030511B (zh) | 2021-12-22 | 2022-09-13 | 北京交通大学 | 一种基于运行时验证的列车调度操作危险预测方法及系统 |
| CN114604297B (zh) * | 2022-04-06 | 2023-04-18 | 中南大学 | 基于对称交替方向乘子法的列车运行控制方法 |
| CN115817199B (zh) * | 2022-11-30 | 2023-09-26 | 同济大学 | 一种用于虚拟轨道列车的牵引导向协同控制方法和系统 |
| CN115716491B (zh) * | 2023-01-10 | 2023-05-16 | 湖南中矿金禾机器人研究院有限公司 | 一种分布驱动式轨道列车车路协同控制系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05278615A (ja) * | 1992-04-02 | 1993-10-26 | Central Japan Railway Co | 運転曲線描画装置 |
| JP2738464B2 (ja) * | 1993-05-17 | 1998-04-08 | ヒューズ・エアクラフト・カンパニー | 速度スペクトル無線通信を使用する列車の位置決定および制御 |
| JP2858529B2 (ja) * | 1993-11-12 | 1999-02-17 | 三菱電機株式会社 | 列車運転曲線作成装置 |
Family Cites Families (207)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2104652A (en) | 1936-01-25 | 1938-01-04 | Gen Electric | Electric discharge device |
| GB482625A (en) | 1936-12-24 | 1938-04-01 | Siemens Electric Lamps & Suppl | Improvements in metal vapour electric discharge lamps |
| US2601634A (en) | 1949-02-14 | 1952-06-24 | Rivette Raymond William | Combination refrigerator and walkin storage compartment |
| US2927711A (en) | 1954-01-12 | 1960-03-08 | Naggiar Joseph Yervant | Tank structure for alternative transportation of liquids and solid goods |
| US3519805A (en) | 1967-11-29 | 1970-07-07 | Westinghouse Electric Corp | Vehicle stopping control apparatus |
| US3655962A (en) | 1969-04-01 | 1972-04-11 | Melpar Inc | Digital automatic speed control for railway vehicles |
| US3650216A (en) | 1969-08-11 | 1972-03-21 | Rex Chainbelt Inc | Railway car speed control transportation system |
| US3948314A (en) | 1971-03-08 | 1976-04-06 | Isothermic Systems Ltd. | Thermodynamically integrated buildings |
| FR2129215A5 (ja) | 1971-03-12 | 1972-10-27 | Pichon Claude | |
| US3781139A (en) | 1971-04-19 | 1973-12-25 | Contrans Gmbh | Energy supply unit for freight containers |
| US3794833A (en) | 1972-05-25 | 1974-02-26 | Westinghouse Air Brake Co | Train speed control system |
| US3865042A (en) | 1973-04-04 | 1975-02-11 | Gen Signal Corp | Automatic switching control system for railway classification yards |
| US3886870A (en) | 1973-04-13 | 1975-06-03 | Frangeco A N F Sa | Gas turbine and electric drive locomotive |
| US4042810A (en) | 1975-01-25 | 1977-08-16 | Halliburton Company | Method and apparatus for facilitating control of a railway train |
| US4005838A (en) | 1975-05-27 | 1977-02-01 | Westinghouse Air Brake Company | Station stop and speed regulation system for trains |
| US4041283A (en) | 1975-07-25 | 1977-08-09 | Halliburton Company | Railway train control simulator and method |
| US4136432A (en) | 1977-01-13 | 1979-01-30 | Melley Energy Systems, Inc. | Mobile electric power generating systems |
| US4181943A (en) | 1978-05-22 | 1980-01-01 | Hugg Steven B | Speed control device for trains |
| IT1192338B (it) | 1978-12-21 | 1988-03-31 | Wabco Westinghouse Spa | Dispositivo di controllo della velocita per motrici ferroviarie |
| US4253399A (en) | 1979-12-10 | 1981-03-03 | Kansas City Southern Railway Company | Railway locomotive fuel saving arrangement |
| US4344364A (en) | 1980-05-09 | 1982-08-17 | Halliburton Company | Apparatus and method for conserving fuel in the operation of a train consist |
| US4401035A (en) | 1980-07-03 | 1983-08-30 | Kansas City Southern Railway Company | Control device for multiple unit locomotive systems |
| CH642418A5 (en) | 1980-10-27 | 1984-04-13 | Brevind Ets | Flushing tank which can be mounted inside a wall for flushing WC pans in sanitary systems |
| US4843575A (en) | 1982-10-21 | 1989-06-27 | Crane Harold E | Interactive dynamic real-time management system |
| US4617627A (en) | 1983-01-17 | 1986-10-14 | Hitachi, Ltd. | Method for automatic operation of a vehicle |
| US4561057A (en) | 1983-04-14 | 1985-12-24 | Halliburton Company | Apparatus and method for monitoring motion of a railroad train |
| US4602335A (en) | 1983-08-10 | 1986-07-22 | K.C. Southern Railway Company | Fuel efficient control of multiple unit locomotive consists |
| FR2558806A1 (fr) | 1984-01-26 | 1985-08-02 | Venissieux Atel | Conteneur de transport perfectionne |
| FI68707C (fi) | 1984-02-09 | 1985-10-10 | Valmet Oy | Dieselaggregat |
| US4663713A (en) | 1984-02-21 | 1987-05-05 | J. I. Case Company | Automatic power control for variable power train |
| US4711418A (en) | 1986-04-08 | 1987-12-08 | General Signal Corporation | Radio based railway signaling and traffic control system |
| US4644705A (en) | 1986-05-07 | 1987-02-24 | Societe D'etudes Techniques Et D'entreprise Generales Sodeteg | Unfolding, movable hospital unit |
| US4794548A (en) | 1986-08-28 | 1988-12-27 | Halliburton Company | Data collection apparatus and train monitoring system |
| US4827438A (en) | 1987-03-30 | 1989-05-02 | Halliburton Company | Method and apparatus related to simulating train responses to actual train operating data |
| US4735385A (en) | 1987-06-24 | 1988-04-05 | Halliburton Company | Apparatus and method for conserving fuel during dynamic braking of locomotives |
| US4853883A (en) | 1987-11-09 | 1989-08-01 | Nickles Stephen K | Apparatus and method for use in simulating operation and control of a railway train |
| US5239472A (en) | 1988-09-28 | 1993-08-24 | Techsearch Incorporated | System for energy conservation on rail vehicles |
| US5240416A (en) | 1988-11-23 | 1993-08-31 | Bennington Thomas E | Simulator apparatus employing actual craft and simulators |
| DE69010602T2 (de) | 1989-09-14 | 1995-01-26 | Fruehauf Japan | Dachstruktur mit Wärmedämmung für Schiffscontainer. |
| EP0428113B1 (de) | 1989-11-14 | 1994-03-30 | Jörg Dipl.-Volkswirt Kreuzer | Abstellplatz für Container |
| US5181541A (en) | 1990-02-06 | 1993-01-26 | B.A. Bodenheimer & Co., Inc. | Multi-tank fuel storage system for refrigerated freight container electric generatore |
| US5109343A (en) | 1990-06-06 | 1992-04-28 | Union Switch & Signal Inc. | Method and apparatus for verification of rail braking distances |
| US5460013A (en) | 1990-10-05 | 1995-10-24 | Thomsen; Van E. | Refrigerated shipping container |
| US5197627A (en) | 1991-03-08 | 1993-03-30 | Petrolite Corporation | Double walled storage tank |
| US5316174A (en) | 1991-03-15 | 1994-05-31 | Protechna Sa | Pallet container |
| US5187945A (en) | 1991-05-13 | 1993-02-23 | Reefco Manufacturing Corporation | Refrigerated container |
| GB2263993B (en) | 1992-02-06 | 1995-03-22 | Westinghouse Brake & Signal | Regulating a railway vehicle |
| GB9202830D0 (en) | 1992-02-11 | 1992-03-25 | Westinghouse Brake & Signal | A railway signalling system |
| US5253153A (en) | 1992-09-16 | 1993-10-12 | General Electric Company | Vehicle headlamp comprising a metal-halide discharge lamp including an inner envelope and a surrounding shroud |
| US5388034A (en) | 1992-09-16 | 1995-02-07 | General Electric Company | Vehicle headlamp comprising a discharge lamp including an inner envelope and a surrounding shroud |
| DE69407452T2 (de) | 1993-03-17 | 1998-07-30 | Hitachi Ltd | Zugbeeinflussungsanlage |
| US5363787A (en) | 1993-06-30 | 1994-11-15 | Konopasek James L | Liquid cargo container for marine transport |
| GB2280171B (en) | 1993-07-22 | 1996-12-18 | Cargo Unit Containers Ltd | Improvments in or relating to freight containers |
| US5398894B1 (en) | 1993-08-10 | 1998-09-29 | Union Switch & Signal Inc | Virtual block control system for railway vehicle |
| DK171019B1 (da) | 1993-12-02 | 1996-04-22 | Maersk Container Ind As | Kølecontainer og gavlramme |
| US5623413A (en) | 1994-09-01 | 1997-04-22 | Harris Corporation | Scheduling system and method |
| US6459964B1 (en) | 1994-09-01 | 2002-10-01 | G.E. Harris Railway Electronics, L.L.C. | Train schedule repairer |
| US5828979A (en) | 1994-09-01 | 1998-10-27 | Harris Corporation | Automatic train control system and method |
| US20040172175A1 (en) | 2003-02-27 | 2004-09-02 | Julich Paul M. | System and method for dispatching by exception |
| CA2142161A1 (en) | 1995-02-09 | 1996-08-10 | Larry Hayward Jewett | Shipping container for shipping livestock |
| WO1997002167A1 (fr) | 1995-07-04 | 1997-01-23 | Hiroyuki Minakami | Systeme de trafic/transport |
| US5676059A (en) | 1995-09-05 | 1997-10-14 | Alt; John Darby | Tram coordinating method and apparatus |
| US5758299A (en) | 1995-11-03 | 1998-05-26 | Caterpillar Inc. | Method for generating performance ratings for a vehicle operator |
| JP3208054B2 (ja) * | 1995-11-09 | 2001-09-10 | 三菱電機株式会社 | 列車運転整理支援装置 |
| JPH09200910A (ja) * | 1996-01-12 | 1997-07-31 | Toshiba Corp | 自動列車運転装置 |
| US5785392A (en) | 1996-02-06 | 1998-07-28 | Westinghouse Air Brake Company | Selectable grade and uniform net shoe force braking for railway freight vehicle |
| US5744707A (en) | 1996-02-15 | 1998-04-28 | Westinghouse Air Brake Company | Train brake performance monitor |
| JP2000501554A (ja) | 1996-09-11 | 2000-02-08 | フィリップス エレクトロニクス ネムローゼ フェンノートシャップ | 反射型ランプ |
| US6334654B1 (en) | 1996-09-13 | 2002-01-01 | New York Air Brake Corporation | Integrated train electrical and pneumatic brakes |
| US6123111A (en) | 1996-09-24 | 2000-09-26 | Alfred Karcher Gmbh & Co. | High pressure hose having a fitting for attachment to a corresponding connector member |
| US5803411A (en) * | 1996-10-21 | 1998-09-08 | Abb Daimler-Benz Transportation (North America) Inc. | Method and apparatus for initializing an automated train control system |
| DE19726542B4 (de) | 1997-05-07 | 2004-04-22 | Schwanhäußer, Wulf, Prof. Dr.-Ing. | Verfahren zur Steuerung und Sicherung eines fahrplangebundenen Verkehrssystems |
| US5998915A (en) | 1997-05-09 | 1999-12-07 | Osram Sylvania Inc. | Mounting support for a high intensity discharge reflector lamp |
| US5950967A (en) | 1997-08-15 | 1999-09-14 | Westinghouse Air Brake Company | Enhanced distributed power |
| JP3392724B2 (ja) | 1997-08-22 | 2003-03-31 | 三菱重工業株式会社 | 走行車両制御方法 |
| FR2767770B1 (fr) | 1997-09-01 | 1999-10-15 | Alsthom Cge Alcatel | Procede de resolution de conflits dans un reseau ferroviaire a l'aide d'un moyen informatique |
| US6263266B1 (en) | 1998-09-11 | 2001-07-17 | New York Air Brake Corporation | Method of optimizing train operation and training |
| CA2303281C (en) * | 1997-09-12 | 2009-11-17 | New York Air Brake Corporation | Method of optimizing train operation |
| US6092021A (en) | 1997-12-01 | 2000-07-18 | Freightliner Corporation | Fuel use efficiency system for a vehicle for assisting the driver to improve fuel economy |
| US6243694B1 (en) | 1997-12-29 | 2001-06-05 | General Electric Company | System and method for generating a fuel-optimal reference velocity profile for a rail-based transportation handling controller |
| US6125311A (en) | 1997-12-31 | 2000-09-26 | Maryland Technology Corporation | Railway operation monitoring and diagnosing systems |
| US6192314B1 (en) | 1998-03-25 | 2001-02-20 | Navigation Technologies Corp. | Method and system for route calculation in a navigation application |
| DE69940161D1 (de) | 1998-06-18 | 2009-02-05 | Kline & Walker L L C | Automatische vorrichtung zur überwachung von auf abstand zu bedienende ausrüstungen und maschinen weltweit anwendbar |
| US6065406A (en) | 1998-06-24 | 2000-05-23 | Katzer; Matthew A. | Model train control system |
| US6270040B1 (en) | 2000-04-03 | 2001-08-07 | Kam Industries | Model train control system |
| US6112142A (en) | 1998-06-26 | 2000-08-29 | Quantum Engineering, Inc. | Positive signal comparator and method |
| DE19830053C1 (de) | 1998-07-04 | 1999-11-18 | Thyssenkrupp Stahl Ag | Einrichtung für die Überwachung eines schienengebundenen Zuges aus einem Triebfahrzeug und mindestens einem Waggon |
| US6554088B2 (en) | 1998-09-14 | 2003-04-29 | Paice Corporation | Hybrid vehicles |
| US6363331B1 (en) * | 1998-12-09 | 2002-03-26 | Meritor Heavy Vehicle Systems, Llc | Weight distribution monitor |
| US6216957B1 (en) | 1999-03-02 | 2001-04-17 | Roger Turunen, Jr. | Heated floor system for a movable structure |
| GB2348034A (en) | 1999-03-17 | 2000-09-20 | Westinghouse Brake & Signal | An interlocking for a railway system |
| US6980894B1 (en) | 1999-04-14 | 2005-12-27 | San Francisco Bay Area Rapid Transit | Method of managing interference during delay recovery on a train system |
| JP4693995B2 (ja) | 1999-04-29 | 2011-06-01 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | メタルハライドランプ |
| JP3398686B2 (ja) | 1999-06-14 | 2003-04-21 | エヌイーシーマイクロシステム株式会社 | 半導体記憶装置 |
| US7164975B2 (en) | 1999-06-15 | 2007-01-16 | Andian Technologies Ltd. | Geometric track and track/vehicle analyzers and methods for controlling railroad systems |
| DE19935349A1 (de) | 1999-07-29 | 2001-02-01 | Abb Daimler Benz Transp | Verfahren zur Energieoptimierung der Fahrweise bei einem Fahrzeug/Zug unter Verwendung der kinetischen Energie |
| DE19935353A1 (de) | 1999-07-29 | 2001-02-01 | Abb Daimler Benz Transp | Verfahren zur Energieoptimierung bei einem Fahrzeug/Zug mit mehreren Antriebsanlagen |
| JP2001065360A (ja) | 1999-08-30 | 2001-03-13 | Yanmar Diesel Engine Co Ltd | エンジン作業機のカバー |
| US6332106B1 (en) | 1999-09-16 | 2001-12-18 | New York Air Brake Corporation | Train handling techniques and analysis |
| US7236462B2 (en) | 1999-10-04 | 2007-06-26 | General Electric Company | Method for data exchange with a mobile asset considering communication link quality |
| US6325050B1 (en) | 2000-03-24 | 2001-12-04 | General Electric Company | Method and system for controlling fuel injection timing in an engine for powering a locomotive |
| US20010052433A1 (en) | 2000-04-14 | 2001-12-20 | Harris Donald B. | Hybrid power supply module |
| US20020059075A1 (en) | 2000-05-01 | 2002-05-16 | Schick Louis A. | Method and system for managing a land-based vehicle |
| US6549803B1 (en) | 2000-05-08 | 2003-04-15 | Image-Guided Neurologics Inc. | Method and apparatus for targeting material delivery to tissue |
| US6380639B1 (en) | 2000-05-11 | 2002-04-30 | Bombardier Inc. | System, method and apparatus for power regulation |
| US6230668B1 (en) | 2000-05-22 | 2001-05-15 | General Electric Company | Locomotive cooling system |
| DE10045921A1 (de) | 2000-09-16 | 2002-03-28 | Intering Interferenztechnik In | Vorrichtung und Verfahren zur Verminderung des Rollens bei Schiffen |
| US7386222B2 (en) | 2000-09-18 | 2008-06-10 | Matsushita Electric Industrial Co., Ltd. | Audio/video information recording/reproducing device and method therefor |
| US6505103B1 (en) | 2000-09-29 | 2003-01-07 | Ge Harris Harmon Railway Technology, Llc | Method and apparatus for controlling remote locomotive operation |
| US9605591B2 (en) | 2000-10-09 | 2017-03-28 | Energy Transfer Group, L.L.C. | Arbitrage control system for two or more available power sources |
| US6434452B1 (en) | 2000-10-31 | 2002-08-13 | General Electric Company | Track database integrity monitor for enhanced railroad safety distributed power |
| US6418854B1 (en) | 2000-11-21 | 2002-07-16 | Edwin R. Kraft | Priority car sorting in railroad classification yards using a continuous multi-stage method |
| US6520124B2 (en) | 2000-12-13 | 2003-02-18 | Tramont Corporation | Double walled fuel tank with integral generator set mounting frame |
| US6687581B2 (en) | 2001-02-07 | 2004-02-03 | Nissan Motor Co., Ltd. | Control device and control method for hybrid vehicle |
| WO2002066974A2 (en) | 2001-02-19 | 2002-08-29 | Rosemount Analytical Inc. | Improved generator monitoring, control and efficiency |
| US6499298B2 (en) | 2001-03-21 | 2002-12-31 | General Motors Corporation | Locomotive engine cooling system and method |
| US6612245B2 (en) | 2001-03-27 | 2003-09-02 | General Electric Company | Locomotive energy tender |
| US7500436B2 (en) | 2003-05-22 | 2009-03-10 | General Electric Company | System and method for managing emissions from mobile vehicles |
| US6922619B2 (en) | 2002-02-28 | 2005-07-26 | General Electric Company | System and method for selectively limiting tractive effort to facilitate train control |
| US7231877B2 (en) | 2001-03-27 | 2007-06-19 | General Electric Company | Multimode hybrid energy railway vehicle system and method |
| US6612246B2 (en) | 2001-03-27 | 2003-09-02 | General Electric Company | Hybrid energy locomotive system and method |
| US7302895B2 (en) | 2002-02-28 | 2007-12-04 | General Electric Company | Configurable locomotive |
| US6615118B2 (en) | 2001-03-27 | 2003-09-02 | General Electric Company | Hybrid energy power management system and method |
| US6591758B2 (en) | 2001-03-27 | 2003-07-15 | General Electric Company | Hybrid energy locomotive electrical power storage system |
| US7131614B2 (en) * | 2003-05-22 | 2006-11-07 | General Electric Company | Locomotive control system and method |
| JP3964149B2 (ja) | 2001-04-10 | 2007-08-22 | 株式会社小糸製作所 | 車両用前照灯 |
| JP3647767B2 (ja) | 2001-04-25 | 2005-05-18 | 株式会社日立製作所 | 列車運転制御システム |
| US6487488B1 (en) | 2001-06-11 | 2002-11-26 | New York Air Brake Corporation | Method of determining maximum service brake reduction |
| US6691957B2 (en) | 2001-06-21 | 2004-02-17 | General Electric Company | Control and method for optimizing the operation of two or more locomotives of a consist |
| US7021588B2 (en) | 2001-06-21 | 2006-04-04 | General Electric Company | System and method for managing two or more locomotives of a consist |
| US7618011B2 (en) | 2001-06-21 | 2009-11-17 | General Electric Company | Consist manager for managing two or more locomotives of a consist |
| JP4331905B2 (ja) | 2001-09-28 | 2009-09-16 | パイオニア株式会社 | ハイブリッドカー、及びハイブリッドカーの制御方法 |
| DE10248456A1 (de) | 2001-10-19 | 2003-06-18 | Denso Corp | Fahrzeugkommunikationssystem |
| US7072757B2 (en) | 2001-10-29 | 2006-07-04 | Caterpillar Inc. | Fuel control system |
| JP3995919B2 (ja) | 2001-11-08 | 2007-10-24 | 株式会社小糸製作所 | 車両用前照灯 |
| US20030104899A1 (en) | 2001-11-30 | 2003-06-05 | Keller Jesse P. | Steerable vehicle having a multiple-power unit controller and a method of controlling power to an electric motor |
| JP3723766B2 (ja) | 2001-12-04 | 2005-12-07 | 株式会社日立製作所 | 列車制御方法および装置 |
| AUPS094202A0 (en) | 2002-03-08 | 2002-03-28 | I-Sense Pty Ltd | Dual fuel engine control |
| US20030222981A1 (en) | 2002-06-04 | 2003-12-04 | Kisak Jeffrey James | Locomotive wireless video recorder and recording system |
| US9733625B2 (en) | 2006-03-20 | 2017-08-15 | General Electric Company | Trip optimization system and method for a train |
| US20030229446A1 (en) | 2002-06-06 | 2003-12-11 | Boscamp Robert L. | Mobile education and entertainment system, method and device |
| DE10226678A1 (de) | 2002-06-15 | 2003-12-24 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Begrenzung der Fahrgeschwindigkeit eines Kraftfahrzeugs |
| US6609049B1 (en) | 2002-07-01 | 2003-08-19 | Quantum Engineering, Inc. | Method and system for automatically activating a warning device on a train |
| US6865454B2 (en) | 2002-07-02 | 2005-03-08 | Quantum Engineering Inc. | Train control system and method of controlling a train or trains |
| US7096171B2 (en) | 2002-08-07 | 2006-08-22 | New York Air Brake Corporation | Train simulator and playback station |
| US6789005B2 (en) | 2002-11-22 | 2004-09-07 | New York Air Brake Corporation | Method and apparatus of monitoring a railroad hump yard |
| US6694231B1 (en) | 2002-08-08 | 2004-02-17 | Bombardier Transportation Gmbh | Train registry overlay system |
| JP4024618B2 (ja) | 2002-08-09 | 2007-12-19 | 株式会社小糸製作所 | 車両用前照灯 |
| JP2004103461A (ja) | 2002-09-11 | 2004-04-02 | Koito Mfg Co Ltd | 放電バルブ用アークチューブ |
| US6810312B2 (en) | 2002-09-30 | 2004-10-26 | General Electric Company | Method for identifying a loss of utilization of mobile assets |
| US6990401B2 (en) | 2002-10-04 | 2006-01-24 | Daimlerchrysler Ag | Predictive speed control for a motor vehicle |
| US6996461B2 (en) | 2002-10-10 | 2006-02-07 | Quantum Engineering, Inc. | Method and system for ensuring that a train does not pass an improperly configured device |
| US6845953B2 (en) | 2002-10-10 | 2005-01-25 | Quantum Engineering, Inc. | Method and system for checking track integrity |
| JP2004173342A (ja) | 2002-11-18 | 2004-06-17 | Hitachi Ltd | 運転支援システム及び運転支援コンピュータプログラム |
| US6957131B2 (en) | 2002-11-21 | 2005-10-18 | Quantum Engineering, Inc. | Positive signal comparator and method |
| DE20218783U1 (de) | 2002-12-03 | 2004-04-08 | Wik Far East Ltd. | Styling- und Curlinghaarbürste |
| DE60331772D1 (de) * | 2002-12-20 | 2010-04-29 | Ansaldo Sts Usa Inc | Dynamisch optimiertes verkehrsplanungsverfahren und system |
| US6863246B2 (en) | 2002-12-31 | 2005-03-08 | Quantum Engineering, Inc. | Method and system for automated fault reporting |
| US8538611B2 (en) | 2003-01-06 | 2013-09-17 | General Electric Company | Multi-level railway operations optimization system and method |
| JP2004220867A (ja) | 2003-01-10 | 2004-08-05 | Koito Mfg Co Ltd | 放電バルブ |
| DE10301314A1 (de) | 2003-01-15 | 2004-07-29 | Behr Gmbh & Co. Kg | Kühlkreislauf, insbesondere für ein Kraftfahrzeuggetriebe |
| US20050171657A1 (en) | 2003-02-05 | 2005-08-04 | General Electric Company | Method and system for improving acceleration rates of locomotives |
| US6873888B2 (en) | 2003-02-05 | 2005-03-29 | General Electric Company | Method and system for improving acceleration rates of locomotives |
| RU2238869C1 (ru) * | 2003-02-12 | 2004-10-27 | ООО "Желдорконсалтинг" | Регистратор параметров движения поезда |
| US20060212188A1 (en) | 2003-02-27 | 2006-09-21 | Joel Kickbusch | Method and apparatus for automatic selection of alternative routing through congested areas using congestion prediction metrics |
| JP4144381B2 (ja) | 2003-03-07 | 2008-09-03 | 市光工業株式会社 | ヘッドランプ |
| DE10311983A1 (de) | 2003-03-12 | 2004-09-30 | Siemens Ag | Verfahren zur Vorgabe einer Geschwindigkeit für ein Schienenfahrzeug |
| US6853888B2 (en) | 2003-03-21 | 2005-02-08 | Quantum Engineering Inc. | Lifting restrictive signaling in a block |
| US6915191B2 (en) | 2003-05-19 | 2005-07-05 | Quantum Engineering, Inc. | Method and system for detecting when an end of train has passed a point |
| JP4229437B2 (ja) | 2003-06-05 | 2009-02-25 | 株式会社小糸製作所 | 自動車用放電バルブおよび自動車前照灯 |
| RU2237589C1 (ru) * | 2003-07-14 | 2004-10-10 | Омский государственный университет путей сообщения | Способ выбора наиболее экономичного режима движения поезда на заданном участке пути |
| EP1673744B1 (en) | 2003-09-05 | 2010-01-27 | Sensitech Inc. | Automatic conditioning of data accumulated by sensors monitoring supply chain processes |
| US6763291B1 (en) | 2003-09-24 | 2004-07-13 | General Electric Company | Method and apparatus for controlling a plurality of locomotives |
| US7127336B2 (en) | 2003-09-24 | 2006-10-24 | General Electric Company | Method and apparatus for controlling a railway consist |
| US6903658B2 (en) | 2003-09-29 | 2005-06-07 | Quantum Engineering, Inc. | Method and system for ensuring that a train operator remains alert during operation of the train |
| US7497201B2 (en) | 2003-11-18 | 2009-03-03 | Mack Trucks, Inc. | Control system and method for improving fuel economy |
| US7072747B2 (en) | 2003-11-20 | 2006-07-04 | General Electric Company | Strategies for locomotive operation in tunnel conditions |
| US6973947B2 (en) | 2003-11-25 | 2005-12-13 | International Truck Intellectual Property Company, Llc | Tractor with integrated cab floor fuel tank |
| CA2554428A1 (en) | 2004-01-26 | 2005-08-11 | Modelgolf, Llc | Systems and methods of measuring and evaluating performance of a physical skill and equipment used to perform the physical skill |
| US7047938B2 (en) | 2004-02-03 | 2006-05-23 | General Electric Company | Diesel engine control system with optimized fuel delivery |
| AU2005217624B2 (en) | 2004-02-24 | 2010-11-25 | General Electric Company | Rail car tracking system |
| US7349797B2 (en) | 2004-03-30 | 2008-03-25 | Railpower Technologies Corp | Emission management for a hybrid locomotive |
| US7664459B2 (en) | 2004-04-26 | 2010-02-16 | General Electric Co. | On-board message repeater for railroad train communications system |
| US7288921B2 (en) | 2004-06-25 | 2007-10-30 | Emerson Process Management Power & Water Solutions, Inc. | Method and apparatus for providing economic analysis of power generation and distribution |
| US7908047B2 (en) | 2004-06-29 | 2011-03-15 | General Electric Company | Method and apparatus for run-time incorporation of domain data configuration changes |
| EP1782361B1 (en) | 2004-08-27 | 2016-04-20 | Accenture Global Services Limited | Railcar transport telematics system |
| US9771834B2 (en) | 2004-10-20 | 2017-09-26 | Emerson Process Management Power & Water Solutions, Inc. | Method and apparatus for providing load dispatch and pollution control optimization |
| US7567859B2 (en) | 2004-12-01 | 2009-07-28 | Honeywell International Inc. | Methods and apparatuses for control of building cooling, heating and power co-generation systems |
| JP4622496B2 (ja) | 2004-12-08 | 2011-02-02 | 株式会社デンソー | 電気系の電源制御装置 |
| US7522990B2 (en) | 2005-06-08 | 2009-04-21 | General Electric Company | System and method for improved train handling and fuel consumption |
| US7254947B2 (en) | 2005-06-10 | 2007-08-14 | Deere & Company | Vehicle cooling system |
| US7844396B2 (en) | 2005-09-13 | 2010-11-30 | Deere & Company | Method and system for modular data processing for a vehicle control system |
| US7131403B1 (en) | 2005-10-05 | 2006-11-07 | General Electric Company | Integrated engine control and cooling system for diesel engines |
| US7925426B2 (en) | 2005-11-17 | 2011-04-12 | Motility Systems | Power management systems and devices |
| US7667611B2 (en) | 2005-11-30 | 2010-02-23 | Caterpillar Inc. | High voltage detection system |
| US7599750B2 (en) | 2005-12-21 | 2009-10-06 | Pegasus Technologies, Inc. | Model based sequential optimization of a single or multiple power generating units |
| US9266542B2 (en) | 2006-03-20 | 2016-02-23 | General Electric Company | System and method for optimized fuel efficiency and emission output of a diesel powered system |
| US8401720B2 (en) | 2006-03-20 | 2013-03-19 | General Electric Company | System, method, and computer software code for detecting a physical defect along a mission route |
| US7974774B2 (en) | 2006-03-20 | 2011-07-05 | General Electric Company | Trip optimization system and method for a vehicle |
| US8370006B2 (en) | 2006-03-20 | 2013-02-05 | General Electric Company | Method and apparatus for optimizing a train trip using signal information |
| US7734383B2 (en) | 2006-05-02 | 2010-06-08 | General Electric Company | Method and apparatus for planning the movement of trains using dynamic analysis |
| US7347168B2 (en) | 2006-05-15 | 2008-03-25 | Freightliner Llc | Predictive auxiliary load management (PALM) control apparatus and method |
| US7774133B2 (en) | 2006-07-05 | 2010-08-10 | Sap Ag | Method and apparatus for trip routing with configurable constraints |
| US9120494B2 (en) | 2006-12-04 | 2015-09-01 | General Electric Company | System, method and computer software code for remotely assisted operation of a railway vehicle system |
| US7680566B2 (en) | 2006-12-18 | 2010-03-16 | Ztr Control Systems | System and method for controlling horsepower in a locomotive consist |
| US7899584B2 (en) | 2007-02-28 | 2011-03-01 | Caterpillar Inc. | Method of controlling a vehicle based on operation characteristics |
| US7795752B2 (en) | 2007-11-30 | 2010-09-14 | Caterpillar Inc | System and method for integrated power control |
-
2007
- 2007-01-09 US US11/621,221 patent/US8473127B2/en active Active
- 2007-04-16 BR BRPI0706036-0A patent/BRPI0706036A2/pt not_active IP Right Cessation
- 2007-04-16 CA CA002622726A patent/CA2622726A1/en not_active Abandoned
- 2007-04-16 RU RU2012124894/11A patent/RU2605648C2/ru active
- 2007-04-16 WO PCT/US2007/066697 patent/WO2007136947A2/en active Application Filing
- 2007-04-16 RU RU2008110502/11A patent/RU2470814C2/ru active
- 2007-04-16 EP EP07760703A patent/EP2024217A2/en not_active Ceased
- 2007-04-16 JP JP2009511134A patent/JP2009537384A/ja active Pending
- 2007-04-16 AU AU2007253963A patent/AU2007253963A1/en not_active Abandoned
-
2012
- 2012-02-21 JP JP2012034736A patent/JP2012136217A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05278615A (ja) * | 1992-04-02 | 1993-10-26 | Central Japan Railway Co | 運転曲線描画装置 |
| JP2738464B2 (ja) * | 1993-05-17 | 1998-04-08 | ヒューズ・エアクラフト・カンパニー | 速度スペクトル無線通信を使用する列車の位置決定および制御 |
| JP2858529B2 (ja) * | 1993-11-12 | 1999-02-17 | 三菱電機株式会社 | 列車運転曲線作成装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9603480B2 (en) | 2008-12-03 | 2017-03-28 | Koninklijke Douwe Egberts B.V. | System, package, apparatus and method for dosing coffee beans |
| WO2020194485A1 (ja) * | 2019-03-26 | 2020-10-01 | 三菱電機株式会社 | データ収集装置およびデータ収集方法 |
| JPWO2020194485A1 (ja) * | 2019-03-26 | 2021-10-14 | 三菱電機株式会社 | データ収集装置およびデータ収集方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012136217A (ja) | 2012-07-19 |
| RU2470814C2 (ru) | 2012-12-27 |
| EP2024217A2 (en) | 2009-02-18 |
| RU2012124894A (ru) | 2013-12-20 |
| AU2007253963A1 (en) | 2007-11-29 |
| WO2007136947A2 (en) | 2007-11-29 |
| RU2008110502A (ru) | 2009-09-27 |
| BRPI0706036A2 (pt) | 2011-03-15 |
| CA2622726A1 (en) | 2007-11-29 |
| WO2007136947A3 (en) | 2008-01-24 |
| US20100262321A1 (en) | 2010-10-14 |
| US8473127B2 (en) | 2013-06-25 |
| RU2605648C2 (ru) | 2016-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009537384A (ja) | 軌道車パラメータを考慮に入れて列車の運行を最適化するシステム、方法、およびコンピュータソフトウェアコード | |
| JP5469462B2 (ja) | 複数の動力分散方式の機関車を含む列車のために鉄道列車の運転を最適化するための方法および装置 | |
| JP5265567B2 (ja) | 乗物を運行させる方法 | |
| US8768543B2 (en) | Method, system and computer software code for trip optimization with train/track database augmentation | |
| US9162690B2 (en) | System and method for controlling movement of vehicles | |
| US8630757B2 (en) | System and method for optimizing parameters of multiple rail vehicles operating over multiple intersecting railroad networks | |
| US9733625B2 (en) | Trip optimization system and method for a train | |
| CN101356089B (zh) | 鉴于有轨车厢参数优化火车运行的系统、方法和计算机软件代码 | |
| US20070225878A1 (en) | Trip optimization system and method for a train | |
| WO2008073546A2 (en) | Method and apparatus for optimizing railroad train operation for a train including multiple distributed-power locomotives | |
| AU2013206474A1 (en) | Method and apparatus for optimizing railroad train operation for a train including multiple distributed-power locomotives | |
| AU2015200168A1 (en) | System, method and computer software code for optimizing train operations considering rail car parameters | |
| AU2013202194A1 (en) | System, method and computer software code for optimizing train operations considering rail car parameters | |
| RU2466049C2 (ru) | Система и способ для оптимизации параметров множества железнодорожных транспортных средств, действующих в железнодорожных сетях с множеством пересечений | |
| JP5469463B2 (ja) | 列車のための運行最適化システムおよび方法 | |
| AU2016202936A1 (en) | Method and apparatus for optimizing railroad train operation for a train including multiple distributed-power locomotives | |
| MX2008003359A (en) | System and method for optimizing parameters of multiple rail vehicles operating over multiple intersecting railroad networks | |
| MX2008003360A (en) | Method and apparatus for optimizing railroad train operation for a train including multiple distributed-power locomotives |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100408 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100408 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100408 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110331 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111025 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120113 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120120 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120515 |