JP2006014107A - 固体撮像装置 - Google Patents
固体撮像装置 Download PDFInfo
- Publication number
- JP2006014107A JP2006014107A JP2004190627A JP2004190627A JP2006014107A JP 2006014107 A JP2006014107 A JP 2006014107A JP 2004190627 A JP2004190627 A JP 2004190627A JP 2004190627 A JP2004190627 A JP 2004190627A JP 2006014107 A JP2006014107 A JP 2006014107A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- pixel
- unit
- noise suppression
- capacitor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003384 imaging method Methods 0.000 title claims abstract description 52
- 230000003321 amplification Effects 0.000 claims abstract description 31
- 238000003199 nucleic acid amplification method Methods 0.000 claims abstract description 31
- 239000003990 capacitor Substances 0.000 claims description 147
- 230000001629 suppression Effects 0.000 claims description 141
- 238000000034 method Methods 0.000 claims description 7
- 238000006243 chemical reaction Methods 0.000 claims description 6
- 101710114762 50S ribosomal protein L11, chloroplastic Proteins 0.000 description 75
- 101710082414 50S ribosomal protein L12, chloroplastic Proteins 0.000 description 46
- 238000010586 diagram Methods 0.000 description 21
- 102100033118 Phosphatidate cytidylyltransferase 1 Human genes 0.000 description 19
- 101710178747 Phosphatidate cytidylyltransferase 1 Proteins 0.000 description 19
- 101710156159 50S ribosomal protein L21, chloroplastic Proteins 0.000 description 17
- 238000005070 sampling Methods 0.000 description 17
- 101000980998 Arabidopsis thaliana Phosphatidate cytidylyltransferase 4, chloroplastic Proteins 0.000 description 15
- 101710087140 50S ribosomal protein L22, chloroplastic Proteins 0.000 description 14
- 101710164994 50S ribosomal protein L13, chloroplastic Proteins 0.000 description 7
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 102100033126 Phosphatidate cytidylyltransferase 2 Human genes 0.000 description 4
- 101710178746 Phosphatidate cytidylyltransferase 2 Proteins 0.000 description 4
- 230000006866 deterioration Effects 0.000 description 4
- 101710118399 50S ribosomal protein L24, chloroplastic Proteins 0.000 description 3
- 101000980996 Arabidopsis thaliana Phosphatidate cytidylyltransferase 3 Proteins 0.000 description 2
- 101000623713 Homo sapiens Motile sperm domain-containing protein 3 Proteins 0.000 description 2
- 102100023091 Motile sperm domain-containing protein 3 Human genes 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000470 constituent Substances 0.000 description 1
- 230000000750 progressive effect Effects 0.000 description 1
Images
















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/60—Noise processing, e.g. detecting, correcting, reducing or removing noise
- H04N25/616—Noise processing, e.g. detecting, correcting, reducing or removing noise involving a correlated sampling function, e.g. correlated double sampling [CDS] or triple sampling
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/40—Extracting pixel data from image sensors by controlling scanning circuits, e.g. by modifying the number of pixels sampled or to be sampled
- H04N25/46—Extracting pixel data from image sensors by controlling scanning circuits, e.g. by modifying the number of pixels sampled or to be sampled by combining or binning pixels
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/71—Charge-coupled device [CCD] sensors; Charge-transfer registers specially adapted for CCD sensors
- H04N25/75—Circuitry for providing, modifying or processing image signals from the pixel array
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/76—Addressed sensors, e.g. MOS or CMOS sensors
- H04N25/78—Readout circuits for addressed sensors, e.g. output amplifiers or A/D converters
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Solid State Image Pick-Up Elements (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
Abstract
【解決手段】 単位画素を2次元的に配置した画素部1と、画素部の読み出し行を選択する垂直走査回路2と、画素部の出力信号に含まれるノイズ成分を抑圧するノイズ抑圧部4と、ノイズ抑圧された信号を出力するための水平選択スイッチ部5及び水平走査回路6と、ノイズ抑圧部と水平走査回路の動作タイミングを決めるモード制御部8とを備え、前記ノイズ抑圧部には画素信号のノイズ抑圧を行うノイズ抑圧処理機能と所定方向の複数の画素信号を混合する信号混合処理機能とをもたせ、モード制御部によりノイズ抑圧処理後の画素信号を出力させる第1のモード及びノイズ抑圧処理と信号混合処理との並列処理後の画素信号を出力させる第2のモードの制御を行わせる。
【選択図】 図 1
Description
C31に蓄積される差電圧: VV11-SIG −VREF ・・・・・・・・・(1)
C32に蓄積される差電圧: VV12-SIG −VREF ・・・・・・・・・(2)
但し、入力バッファアンプA21とA22は、理想的なゲイン=1のアンプとする。
ΔVV11 =VV11-RST −VV11-SIG ・・・・・・・・・・(3)
ΔVV12 =VV12-RST −VV12-SIG ・・・・・・・・・・(4)
VCL11=VREF +ΔVV11 ・・・・・・・・・・・・・・(5)
VCL12=VREF +ΔVV12 ・・・・・・・・・・・・・・(6)
VCL11=VREF +{(ΔVV11 +ΔVV12 )/2} ・・・・・・・・(7)
ここで、クランプ用容量C31とC32は、同じ容量値CCLであるものとする。
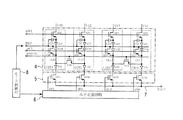
まず、実施例1について説明する。図1は、本発明に係る増幅型MOSセンサを用いた固体撮像装置の実施例1を示す回路構成図である。図16に示した従来例と対応する構成要素には同一の符号を付して示している。本実施例に係る固体撮像装置は、単位画素P11〜P44を行方向及び列方向に二次元的に、ここでは4×4画素配列で配置した画素部1と、画素部1の読み出し行を選択する垂直走査回路2と、画素部1にバイアス電流を供給する電流源111 〜114 からなる電流供給部3と、画素部1の出力信号に含まれるノイズ成分を抑圧するノイズ抑圧部4と、ノイズ抑圧された信号を出力するためのスイッチ用トランジスタM101 〜M104 からなる水平選択スイッチ部5と、水平選択スイッチ部5の読み出し列を選択する水平選択パルスφH1〜φH4を出力する水平走査回路6と、出力ライン7と、ノイズ抑圧部4と水平走査回路6の動作タイミングを決めるモード制御部8とから構成されている。
C31に蓄積される差電圧: VV11-SIG −VREF ・・・・・・・・・(8)
C32に蓄積される差電圧: VV12-SIG −VREF ・・・・・・・・・(9)
ΔVV12 −ΔVCL11=ΔQC32 /C32 ・・・・・・・・・(11)
ΔVCL11=ΔQ/(C41+C42) ・・・・・・・・・・・(12)
ΔQ=ΔQC31 +ΔQC32 ・・・・・・・・・・・・・・・(13)
ここで、クランプ出力ライン電圧VCL11(=VCL12)の変化量をΔVCL11(=ΔVCL12)、クランプ用容量C31とC32の電荷変化量をΔQC31 とΔQC32 ,ホールド用容量C41とC42の合計電荷変化量をΔQとする。
ΔVCL11=〔{CCL/(CCL+CSH)}×(ΔVV11 +ΔVV12 )/2〕
・・・・・・・(14)
VCL11=VREF +ΔVCL11
=VREF +〔{CCL/(CCL+CSH)}×(ΔVV11 +ΔVV12 )/2〕
・・・・・・・(15)
VCL11=VREF +{(ΔVV11 +ΔVV12 )/2} ・・・・・・・・(16)
図5は、本発明に係る増幅型MOSセンサを用いた固体撮像装置の実施例2における主要部の構成を示す回路構成図である。この実施例は、実施例1に対してノイズ抑圧部4の構成を変更することにより、2本のクランプ出力ラインの水平混合信号を、一方のクランプ出力ラインに接続されているホールド用容量のみに蓄積することで、水平混合信号の振幅を大きくすることができるようにしたもので、次にその構成について説明する。なお、図示以外の画素部等の構成は図1に示した実施例1のものと同一であり、図5において実施例1と対応する構成要素には同一の符号を付して示している。
ΔVCL11=〔{2CCL/(2CCL+CSH)}×(ΔVV11 +ΔVV12 )/2〕
・・・・・・・(17)
VCL11=VREF +〔{2CCL/(2CCL+CSH)}×(ΔVV11 +ΔVV12 )/2〕
・・・・・・・(18)
ここで、クランプ用容量C31とC32は同じ容量値CCL,ホールド用容量C41は容量値CSHとする。
図7は、本発明に係る増幅型MOSセンサを用いた固体撮像装置の実施例3を示す回路構成図である。この実施例は、画素部1の同一列に2本の垂直信号線を設け、且つノイズ抑圧部4において2行分の画素信号を同時に差分処理できるように構成し、垂直走査回路2によって同時に2行分の画素信号を読み出すことで、画素信号のノイズ抑圧動作と2行分の画素信号の垂直混合動作を同時に行うことができるようにしたものである。次に、その構成について説明する。なお、実施例1と対応する構成要素には同一の符号を付して示している。
ΔVCL11=〔{2CCL/(2CCL+CSH)}×(ΔVV11 +ΔVV21 )/2〕
・・・・・・・(19)
VCL11=VREF +〔{2CCL/(2CCL+CSH)}×(ΔVV11 +ΔVV21 )/2〕
・・・・・・・(20)
ここで、クランプ用容量C31とC51は同じ容量値CCL,ホールド用容量C41は容量値CSHとする。
図10は、本発明に係る増幅型MOSセンサを用いた固体撮像装置の実施例4における主要部の構成を示す回路構成図である。この実施例は、実施例3に対比してノイズ抑圧部4の構成を変更することにより、垂直混合動作と水平混合動作の両方に対応させ、画素信号のノイズ抑圧動作と2行2列分の画素信号の混合動作を同時に行うことができるようにしたものである。次に、その構成について説明する。なお、図示以外の画素部等の構成は、図7に示した実施例3と同一であり、図10において、図7に示した実施例3と対応する構成要素には同一の符号を付して示している。
ΔVCL11=〔{2CCL/(2CCL+CSH)}
×(ΔVV11 +ΔVV21 +ΔVV12 +ΔVV22 )/2〕・・・・・(21)
VCL11=VREF +〔{2CCL/(2CCL+CSH)}
×(ΔVV11 +ΔVV21 +ΔVV12 +ΔVV22 )/2〕 ・・・・・(22)
ここで、クランプ用容量C31とC51とC32とC52は同じ容量値CCL,ホールド用容量C41とC42は容量値CSHとする。
図13は、本発明に係る増幅型MOSセンサを用いた固体撮像装置の実施例5における主要部の構成を示す回路構成図である。この実施例は、図10に示した実施例4に対比してノイズ抑圧部4の構成を変更することにより、混合信号を1列おきのホールド用容量C41及びC43のみに蓄積することで、混合信号の振幅を大きくすることができるようにしたものである。次に、その構成について説明する。なお、図示以外の画素部等の構成は、図7に示した実施例3のものと同一であり、図13において、図10に示した実施例4と対応する構成要素には同一の符号を付して示している。
ΔVCL11=〔{4CCL/(4CCL+CSH)}
×(ΔVV11 +ΔVV21 +ΔVV12 +ΔVV22 )/2〕・・・・・(23)
VCL11=VREF +〔{4CCL/(4CCL+CSH)}
×(ΔVV11 +ΔVV21 +ΔVV12 +ΔVV22 )/2〕 ・・・・・(24)
ここで、クランプ用容量C31及びC51とC32とC52は、同じ容量値CCL,ホールド用容量C41は容量値CSHとする。
2 垂直走査回路
3 電流供給部
4 ノイズ抑圧部
5 水平選択スイッチ部
6 水平走査回路
7 出力ライン
8 モード制御部
P11〜P44 単位画素
V11〜V24 垂直信号線
CDS1〜CDS4 ノイズ抑圧回路
Claims (7)
- 光電変換部と該光電変換部の出力を増幅して画素信号を出力する増幅部とを含んだ画素を行方向及び列方向に二次元的に配置した画素部と、該画素部の読み出し行を選択する垂直走査部と、単位画素毎に前記画素信号のノイズ抑圧を行うノイズ抑圧処理機能及び所定方向の複数の前記画素信号を混合する信号混合処理機能とを備えたノイズ抑圧部と、該ノイズ抑圧部を経た前記水平方向に係る画素信号を順次、水平信号線から出力させる水平走査部と、前記ノイズ抑圧処理後の画素信号を前記水平信号線に出力させる第1のモード及び前記ノイズ抑圧処理と前記信号混合処理の並列処理後の画素信号を前記水平信号線に出力させる第2のモードの各モードに応じた制御を行うモード制御部とを備えたことを特徴とする固体撮像装置。
- 前記ノイズ抑圧部は、前記列毎に設けられた容量と、少なくとも2つ以上の前記容量を接続するスイッチとを有し、前記モード制御部は、前記第2のモードにおいて、前記スイッチにより複数の前記容量を接続した状態で、前記容量に前記画素信号の第1出力レベル及び引き続いて第2出力レベルを印加するように制御することを特徴とする請求項1に係る固体撮像装置。
- 前記ノイズ抑圧部は、前記列毎に、第1の容量と、第2の容量と、前記第1の容量と前記第2の容量とを接続する第1のスイッチと、複数の前記第1の容量を接続する第2のスイッチとを有し、前記モード制御部は、前記第2のモードにおいて、前記第2のスイッチによりN個(但し、N≧2)の前記第1の容量を接続し、且つ前記第1のスイッチによりM個(但しM<N)の前記第2の容量を接続した状態で、前記第2の容量に前記画素信号の第1出力レベル及び引き続いて第2出力レベルを印加するように制御することを特徴とする請求項1に係る固体撮像装置。
- 前記ノイズ抑圧部は、前記列毎であって且つ複数の行の各々に対応して並列に設けられた複数の第1の容量と、前記列の複数の第1の容量を選択的に接続する第1のスイッチとを有し、前記モード制御部は、前記第2のモードにおいて、前記第1のスイッチにより選択された同一列に係る複数の前記第1の容量を接続した状態で、前記第1の容量に前記画素信号の第1出力レベル及び引き続いて第2出力レベルを印加するように制御することを特徴とする請求項1に係る固体撮像装置。
- 前記画素部は、前記列毎に複数の信号線を有し、同一列の複数の画素は所定の画素単位で異なる信号線に接続されており、複数の前記第1の容量は、各々、前記複数の信号線の信号線毎に設けられていることを特徴とする請求項4に係る固体撮像装置。
- 前記ノイズ抑圧部は、異なる前記列の前記第1の容量を複数接続する第2のスイッチを更に有し、前記モード制御部は、前記第2のモードにおいて、前記第2のスイッチにより異なる前記列の前記第1の容量を複数接続した状態で、前記第1の容量に前記画素信号の第1出力レベル及び引き続いて第2出力レベルを印加するように制御することを特徴とする請求項4に係る固体撮像装置。
- 前記ノイズ抑圧部は、第2の容量と、前記第1の容量と前記第2の容量とを接続する第3のスイッチとを更に有し、前記モード制御部は、第2のモードにおいて、前記第2のスイッチによりN個(但し、N≧2)の前記第1の容量を接続し、且つ前記第3のスイッチによりM個(但しM<N)の前記第2の容量を接続した状態で、前記第2の容量に前記画素信号の第1出力レベル及び引き続いて第2出力レベルを印加するように制御することを特徴とする請求項6に係る固体撮像装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004190627A JP4584634B2 (ja) | 2004-06-29 | 2004-06-29 | 固体撮像装置 |
| US11/166,190 US7598992B2 (en) | 2004-06-29 | 2005-06-27 | Imaging apparatus having pixel sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004190627A JP4584634B2 (ja) | 2004-06-29 | 2004-06-29 | 固体撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006014107A true JP2006014107A (ja) | 2006-01-12 |
| JP2006014107A5 JP2006014107A5 (ja) | 2007-07-12 |
| JP4584634B2 JP4584634B2 (ja) | 2010-11-24 |
Family
ID=35505244
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004190627A Expired - Fee Related JP4584634B2 (ja) | 2004-06-29 | 2004-06-29 | 固体撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7598992B2 (ja) |
| JP (1) | JP4584634B2 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007266760A (ja) * | 2006-03-27 | 2007-10-11 | Canon Inc | 撮像素子 |
| JP2008092014A (ja) * | 2006-09-29 | 2008-04-17 | Olympus Corp | 固体撮像装置 |
| JP2010245955A (ja) * | 2009-04-08 | 2010-10-28 | Sony Corp | 固体撮像素子およびカメラシステム |
| JP2010272985A (ja) * | 2009-05-19 | 2010-12-02 | Canon Inc | 固体撮像装置 |
| JP2011015223A (ja) * | 2009-07-02 | 2011-01-20 | Olympus Corp | 固体撮像装置 |
| JP2011097646A (ja) * | 2011-01-31 | 2011-05-12 | Toshiba Corp | 固体撮像装置及びその画素平均化処理方法 |
| JP2011155395A (ja) * | 2010-01-26 | 2011-08-11 | Canon Inc | 撮像素子及び撮像装置 |
| JP2011211455A (ja) * | 2010-03-30 | 2011-10-20 | Sony Corp | 固体撮像装置および撮像装置 |
| JP2011239070A (ja) * | 2010-05-07 | 2011-11-24 | Sony Corp | 固体撮像装置、および、その製造方法、電子機器 |
| WO2013153991A1 (ja) * | 2012-04-09 | 2013-10-17 | オリンパスメディカルシステムズ株式会社 | 固体撮像装置 |
| JP2014033433A (ja) * | 2012-07-12 | 2014-02-20 | Canon Inc | 撮像素子 |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006014316A (ja) * | 2004-06-22 | 2006-01-12 | Samsung Electronics Co Ltd | サブサンプリングされたアナログ信号を平均化する改善された固体撮像素子及びその駆動方法 |
| JP4723994B2 (ja) * | 2005-12-19 | 2011-07-13 | 株式会社東芝 | 固体撮像装置 |
| JP2007300521A (ja) * | 2006-05-02 | 2007-11-15 | Olympus Corp | 固体撮像装置 |
| JP4185949B2 (ja) * | 2006-08-08 | 2008-11-26 | キヤノン株式会社 | 光電変換装置及び撮像装置 |
| JP5106092B2 (ja) * | 2007-12-26 | 2012-12-26 | パナソニック株式会社 | 固体撮像装置およびカメラ |
| JP5268389B2 (ja) * | 2008-02-28 | 2013-08-21 | キヤノン株式会社 | 固体撮像装置、その駆動方法及び撮像システム |
| JP4500862B2 (ja) * | 2008-04-11 | 2010-07-14 | キヤノン株式会社 | 固体撮像装置の駆動方法 |
| US8659682B2 (en) * | 2008-05-30 | 2014-02-25 | Olympus Corporation | Solid-state imaging apparatus |
| JP5322696B2 (ja) * | 2009-02-25 | 2013-10-23 | キヤノン株式会社 | 固体撮像装置及びその駆動方法 |
| WO2010119702A1 (ja) * | 2009-04-16 | 2010-10-21 | パナソニック株式会社 | 固体撮像素子および駆動方法 |
| JP6023437B2 (ja) * | 2012-02-29 | 2016-11-09 | キヤノン株式会社 | 固体撮像装置及びカメラ |
| JP2015015596A (ja) * | 2013-07-04 | 2015-01-22 | キヤノン株式会社 | 撮像装置及びその駆動方法 |
| JP6634035B2 (ja) * | 2017-01-05 | 2020-01-22 | キヤノン株式会社 | 撮像素子及び撮像装置 |
| CN108922940B (zh) * | 2018-07-17 | 2020-03-06 | 京东方科技集团股份有限公司 | 光学检测像素单元、电路、光学检测方法和显示装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59101979A (ja) * | 1982-12-03 | 1984-06-12 | Hitachi Denshi Ltd | 固体撮像装置の雑音除去回路 |
| JPS60154784A (ja) * | 1984-01-25 | 1985-08-14 | Hitachi Ltd | 固体撮像装置 |
| JP2000341699A (ja) * | 1999-05-31 | 2000-12-08 | Canon Inc | カラー撮像装置及びそれを用いた撮像システム |
| JP2003224776A (ja) * | 2002-01-29 | 2003-08-08 | Canon Inc | 固体撮像装置、カメラ及び情報処理装置 |
| JP2005278135A (ja) * | 2004-02-23 | 2005-10-06 | Sony Corp | 固体撮像装置および固体撮像装置の駆動方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6177293B1 (en) * | 1999-05-20 | 2001-01-23 | Tower Semiconductor Ltd. | Method and structure for minimizing white spots in CMOS image sensors |
| JP2002330349A (ja) | 2001-04-26 | 2002-11-15 | Fujitsu Ltd | Xyアドレス型固体撮像装置 |
| US7304674B2 (en) * | 2002-11-15 | 2007-12-04 | Avago Technologies General Ip Pte Ltd | Sampling image signals generated by pixel circuits of an active pixel sensor (APS) image sensor in a sub-sampling mode |
| JP4921911B2 (ja) * | 2006-09-29 | 2012-04-25 | オリンパス株式会社 | 固体撮像装置 |
-
2004
- 2004-06-29 JP JP2004190627A patent/JP4584634B2/ja not_active Expired - Fee Related
-
2005
- 2005-06-27 US US11/166,190 patent/US7598992B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59101979A (ja) * | 1982-12-03 | 1984-06-12 | Hitachi Denshi Ltd | 固体撮像装置の雑音除去回路 |
| JPS60154784A (ja) * | 1984-01-25 | 1985-08-14 | Hitachi Ltd | 固体撮像装置 |
| JP2000341699A (ja) * | 1999-05-31 | 2000-12-08 | Canon Inc | カラー撮像装置及びそれを用いた撮像システム |
| JP2003224776A (ja) * | 2002-01-29 | 2003-08-08 | Canon Inc | 固体撮像装置、カメラ及び情報処理装置 |
| JP2005278135A (ja) * | 2004-02-23 | 2005-10-06 | Sony Corp | 固体撮像装置および固体撮像装置の駆動方法 |
Cited By (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007266760A (ja) * | 2006-03-27 | 2007-10-11 | Canon Inc | 撮像素子 |
| JP2008092014A (ja) * | 2006-09-29 | 2008-04-17 | Olympus Corp | 固体撮像装置 |
| US7750961B2 (en) | 2006-09-29 | 2010-07-06 | Olympus Corporation | Solid-state imaging apparatus using an amplification-type MOS sensor |
| JP2010245955A (ja) * | 2009-04-08 | 2010-10-28 | Sony Corp | 固体撮像素子およびカメラシステム |
| JP2010272985A (ja) * | 2009-05-19 | 2010-12-02 | Canon Inc | 固体撮像装置 |
| JP2011015223A (ja) * | 2009-07-02 | 2011-01-20 | Olympus Corp | 固体撮像装置 |
| JP2011155395A (ja) * | 2010-01-26 | 2011-08-11 | Canon Inc | 撮像素子及び撮像装置 |
| JP2011211455A (ja) * | 2010-03-30 | 2011-10-20 | Sony Corp | 固体撮像装置および撮像装置 |
| US9653499B2 (en) | 2010-05-07 | 2017-05-16 | Sony Semiconductor Solutions Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| US10177184B2 (en) | 2010-05-07 | 2019-01-08 | Sony Semiconductor Solutions Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| US11671721B2 (en) | 2010-05-07 | 2023-06-06 | Sony Semiconductor Solutions Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| US10978506B2 (en) | 2010-05-07 | 2021-04-13 | Sony Semiconductor Solutions Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| US10720458B2 (en) | 2010-05-07 | 2020-07-21 | Sony Semiconductor Solutions Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| US10355037B2 (en) | 2010-05-07 | 2019-07-16 | Sony Semiconductor Solutions Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| US9438833B2 (en) | 2010-05-07 | 2016-09-06 | Sony Semiconductor Solutions Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| JP2011239070A (ja) * | 2010-05-07 | 2011-11-24 | Sony Corp | 固体撮像装置、および、その製造方法、電子機器 |
| US9923005B2 (en) | 2010-05-07 | 2018-03-20 | Sony Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| US10050073B2 (en) | 2010-05-07 | 2018-08-14 | Sony Semiconductor Solutions Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| JP2011097646A (ja) * | 2011-01-31 | 2011-05-12 | Toshiba Corp | 固体撮像装置及びその画素平均化処理方法 |
| US8829411B2 (en) | 2012-04-09 | 2014-09-09 | Olympus Medical Systems Corp. | Solid-state imaging device |
| JP5409976B1 (ja) * | 2012-04-09 | 2014-02-05 | オリンパスメディカルシステムズ株式会社 | 固体撮像装置 |
| WO2013153991A1 (ja) * | 2012-04-09 | 2013-10-17 | オリンパスメディカルシステムズ株式会社 | 固体撮像装置 |
| JP2014033433A (ja) * | 2012-07-12 | 2014-02-20 | Canon Inc | 撮像素子 |
Also Published As
| Publication number | Publication date |
|---|---|
| US7598992B2 (en) | 2009-10-06 |
| JP4584634B2 (ja) | 2010-11-24 |
| US20050285958A1 (en) | 2005-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4584634B2 (ja) | 固体撮像装置 | |
| JP4921911B2 (ja) | 固体撮像装置 | |
| US7256382B2 (en) | Solid state imaging device, method of driving solid state imaging device and image pickup apparatus | |
| JP4792934B2 (ja) | 物理情報取得方法および物理情報取得装置 | |
| JP4500862B2 (ja) | 固体撮像装置の駆動方法 | |
| JP4609428B2 (ja) | 固体撮像装置、固体撮像装置の駆動方法および撮像装置 | |
| US8743255B2 (en) | Solid-state image pickup apparatus and solid-state image pickup method to reduce power consumption | |
| JP2008042224A (ja) | 固体撮像装置および撮像装置 | |
| JP5495551B2 (ja) | 固体撮像装置 | |
| JP4533367B2 (ja) | 固体撮像装置 | |
| KR20190103455A (ko) | 고체 촬상 소자 및 촬상 장치 | |
| JP2005229373A (ja) | 固体撮像装置および固体撮像装置の駆動方法 | |
| US8102441B2 (en) | Solid-state imaging apparatus | |
| JP5058090B2 (ja) | 固体撮像装置 | |
| JP2015207948A (ja) | 撮像素子及び撮像装置 | |
| JP4788782B2 (ja) | 固体撮像装置および固体撮像装置の駆動方法 | |
| JP5177198B2 (ja) | 物理情報取得方法および物理情報取得装置 | |
| US11653117B2 (en) | Imaging device | |
| JP4116710B2 (ja) | 非破壊読み出し型2次元固体撮像装置 | |
| JP4870832B2 (ja) | 固体撮像装置 | |
| JP2011259301A (ja) | 光電変換装置 | |
| US8184185B2 (en) | Solid-state imaging apparatus | |
| JP2001197378A (ja) | 固体撮像素子 | |
| JP2008300931A (ja) | 撮像装置 | |
| JP2009272919A (ja) | 固体撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070529 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070529 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100105 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100316 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100608 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100621 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20100709 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100811 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100902 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4584634 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130910 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |