JP2005296462A - 遊技機の球体送り出し装置 - Google Patents
遊技機の球体送り出し装置 Download PDFInfo
- Publication number
- JP2005296462A JP2005296462A JP2004119446A JP2004119446A JP2005296462A JP 2005296462 A JP2005296462 A JP 2005296462A JP 2004119446 A JP2004119446 A JP 2004119446A JP 2004119446 A JP2004119446 A JP 2004119446A JP 2005296462 A JP2005296462 A JP 2005296462A
- Authority
- JP
- Japan
- Prior art keywords
- sphere
- delivery device
- gaming machine
- unit
- guide
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Slot Machines And Peripheral Devices (AREA)
- Pinball Game Machines (AREA)
Abstract
本発明の第1の目的は、揚送装置と払出装置を一体化し、小型、安価かつ消費エネルギーが少ない遊技機の球体送り出し装置を提供することである。
本発明の第2の目的は、使用される球体を遊技機内で磨くことができる遊技機の球体送り出し装置を提供することである。
本発明の第3の目的は、球体磨きによって発生したゴミを自動的に排除できる遊技機の球体送り出し装置を提供することである。
【解決手段】
バラ積み状態で球体を保留する保留ボウル、前記保留ボウルから球体を受け入れ、一つずつ強制的に送り出す送り出し装置、前記送り出し装置から送り出された球体を列にして上方に案内する案内部、前記案内部の出口に配置した検出部、前記検出部の検出に基づいて前記送り出し装置を停止する制御部とを含む遊技機の球体送り出し装置である。
【選択図】図2
Description
詳しくは、遊技機の機構を簡単化し、安価に提供できる球体送り出し装置に関する。
さらに詳しくは、球体の検出装置を備えた球体送り出し装置に関する。
なお、本明細書で使用する「球体」の代表例は、パチンコ球である。
換言すれば、球体の積極的送り出し装置が二つ必要であり、設置スペースが大きくなると共に、コスト高であり、さらに消費エネルギーも大きいという問題がある。
本発明の第2の目的は、使用される球体を遊技機内で磨くことができる遊技機の球体送り出し装置を提供することである。
本発明の第3の目的は、球体磨きによって発生したゴミを自動的に排除できる遊技機の球体送り出し装置を提供することである。
バラ積み状態で球体を保留する保留ボウル、前記保留ボウルから球体を受け入れ、一つずつ強制的に送り出す送り出し装置、前記送り出し装置から送り出された球体を列にして上方に案内する案内部、前記案内部の出口に配置した検出部、前記検出部の検出に基づいて前記送り出し装置を停止する制御部とを含む遊技機の球体送り出し装置である。
そして、案内部の出口から所定の装置に払い出される。
検出部は、案内部の出口から払い出される球体を検出する。
そして制御部は、その検出信号をカウントする。
そのカウント数が所定の数になった場合、制御部は球体送り出し装置を停止する。
換言すれば、送り出し装置は所定数の球体の払出装置と揚送装置を兼ね備えている。
したがって、一つの送り出し装置のみ設置すればよいので、装置は小型、かつ、安価であり、さらに、消費エネルギーも少ないという利点がある。
この構成において、球体は案内部によって案内されつつ揚送される。
したがって、球体は、案内部の壁に着脱可能に取り付けられた球体磨き部に対し相対移動する。
換言すれば、球体は球体磨き部によって擦られつつ移動するので、自動的に磨かれる利点を有する。
また、球体磨き部は案内部に取り付けられるので、特別な装置を設けないので小型に形成できる利点を有する。
さらに、球体磨き部は案内部に着脱可能であるので、球体磨き機能が低下した場合、直ぐさま交換可能である。
この構成において、案内部が断面角形のパイプであるから、球体がこのパイプ内を移動する場合、角部において球体とパイプの間にスペースができる。
混入したゴミ等は、この角部空間に追いやられ、球体の通路から排除されるので、球体の移送を効率良く行うことができる。
この構成において、球体磨き部は、パイプの角部に配置されている。
換言すれば、前記したように角部の場合、パイプと球体の間に空間があるため、球体磨き部はその空間に配置される。
したがって、球体磨き部の設置用スペースを新たに設けなくともよいので、装置を小型化できる利点がある。
この構成において、球体はパイプのねじれにより進行方向に対し直角方向にトルクを受けるので、進行方向に伸びる軸線の回りを回動する。
換言すれば、球体の周面が球体磨き部に対し相対移動するので、なんらの装置を設けずとも球体の全周を磨くことができる利点を有する。
この構成において、球体の通路が上下方向にループしているので、ループの底に内部のゴミが落下する。
したがって、この底部に配置した排出孔から、球体磨き部によって球体表面から取り除いたゴミを落下させることができる。
したがって、簡単な装置で通路内のゴミを排除することができる利点がある。
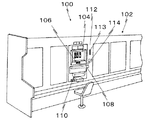
図2は本発明の実施例の球体送り出し装置を内蔵したゲーム機の概略斜視図である。
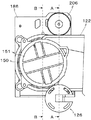
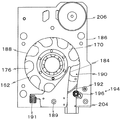
図3は、実施例の球体送り出し装置の平面図である。
図4は、図3におけるA―A線断面図である。
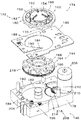
図5は、実施例の球体送り出し装置の分解斜視図である。
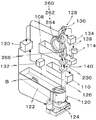
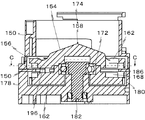
図6は、図3におけるB―B線断面図である。
図7は、図6におけるC―C線断面図である。
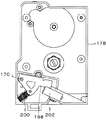
図8は、実施例の球体送り出し装置の裏面図である。
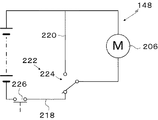
図9は、実施例の制動部の回路図である。
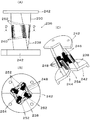
図10は、実施例の球体磨き部の正面図、D―D線断面図及び縦断面斜視図である。
図11は、実施例の検知部の正面図、背面図及び裏面図である。
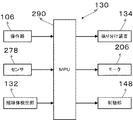
図12は、実施例の制御部のブロック図である。
図13は、実施例の作用説明用のフローチャートである。
次に遊技機100の概要を図1及び2を参照して説明する。
遊技機100は、その正面に上から順に、ゲーム内容等の表示部104、操作部106、球体投入皿108及び入賞球払出皿110が配置されている。
球体投入皿108は、賭け球体をバラ状態で受け入れ、底面の傾斜により所定の投入口に順次供給する機能を有する。
入賞球払出皿110は、払い出された入賞球をバラ状体で保留する機能を有する。
詳述すれば、台間装置112の受け入れ口113に所定金額、又はプリペイドカードを挿入し、受け入れた所定金額に対し所定数の球体が払出ノズル114に払い出される。
払い出された球体は、払出ノズル114によって球体投入皿108に供給される。
球体送り出し装置120は、保留ボウル122、送り出し部124、案内部126、検出部128及び制御部130を含んでいる。
保留ボウル122は、横長矩形であり、底部が送り出し部124側へ傾斜しており、球体Bをバラ積み状態で保留する。
案内部126は、送り出し部124により送り出された球体Bを一列に並べて上方へ案内する機能を有する。
検出部128は、案内部126の先端から払い出される球体Bを検出する機能を有する。
賭球体検出器132は、球体投入皿108から受け入れた球体Bを、操作部106からの賭球体受け入れ指示に基づいて所定数を計数し、保留ボウル122へ送り出すと共に賭球体検出信号を制御部130に出力する。
送り出し部124は、分離部142、押出部144、駆動部146及び制動部148を含んでいる。
分離部142は、バラ積み状態の球体Bを一個づつ区分けする機能を有している。
実施例において分離部142は、保留ボウル122に隣接配置され、かつ、上下方向に伸びるシリンダ状の保留部150の底部に配置された円板形の分離ディスク152である。
保留部150の上部開口は、通常、着脱可能な蓋151により閉止されている。
滑落部154には、等角度間隔で攪拌突起158が形成されている。
本実施例において攪拌突起158は、120度間隔で回転軸線から周方向に伸びるリブ状の突起である。
滑落部154の周囲に分離ディスク152の回転軸線を中心とする凹溝160が形成されている。
複数の通孔162が回転軸線を中心とする同一円上に等間隔で凹溝160に形成されている。
通孔162の周方向の幅は、球体Bの直径よりも僅かに大きく、長さは球体Bの直径の二倍以下に形成され、かつ、滑落部154及び平板部156の上面から滑らかな曲面で接続されている。
換言すれば、通孔162には球体1個のみが位置することができる。
押出部144は、分離ディスク152とほぼ同径の円板状の押出ディスク164である。
押出ディスク164の上面には、押出ディスク164の回転軸線から周方向にインボリュート曲線状に伸びる保持溝166が通孔162に相対して形成されている。
換言すれば、所定の高さの下押出条168がインボリュート曲線状に伸びている。
なお、下押出条168は、球体Bをスムーズに移動させることが出来る場合、直線又は弧状に形成されることができる。
これら分離ディスク152と押出ディスク164は、ボールベアリング172を挟んで一体化され、送出ディスク174を構成している。
したがって、下押出条168、上押出条170、分離ディスク152の下面及び押出ディスク164上面によって囲まれ、周面が開口した保持空間176が形成されている。
円形穴180の中央に固定軸182がほぼ垂直に固定され、その上端部にベアリング172が取り付けられている。
これにより、送出ディスク174は回転自在に支持されている。
案内プレート186は、案内片184、円形の案内孔188及び案内片184と案内孔188とにより形成した導出通路190とを有する。
なお、案内片184は、ベース178に固定した軸189にピボット可能に取付け、かつ、付勢体191、例えばスプリングによって図7において時計方向へ付勢され、図7に示す位置でストッパ(図示せず)により停止されている。
案内片184に球体Bが衝突した場合、案内片184が僅かにスプリング力に反して回動し、衝突のショックが緩和される。
したがって、通孔162に落下した球体Bは、押出ディスク162の保持溝166の底に支えられ、下押出条168及び上押出条170に押され、その直径部を案内孔188に案内されつつ送出ディスク174の回転ととも回動される。
導出路190は、球体Bの直径よりも僅かに幅が広く形成されている。
したがって、球体Bは導出路190を一列に並んで移動する。
導出路190に相対する円形穴180の周壁が開口され、出口開口192が形成されている。
球体切装置194は、ガイドローラ196、揺動レバー198、付勢体200及びセンサ202を含んでいる。
ガイドローラ196は、レバー198の一端に取付けられている。
レバー198は、スプリングである付勢体200によって図8において反時計方向に付勢されている。
これにより、ガイドローラ196は、出口開口192の近傍に配置され、出口通路204内の位置に保持される。
また、ガイドローラ196は、球体Bによって付勢体200の付勢力に反して出口通路204外に移動可能である。
したがって、球体切り装置194を通過した球体Bは、戻ることができない。
なお、センサ202は、配置せずとも良い。なぜなら、その機能は検出部128のセンサ278で代用可能であるから。
駆動部146は、送出ディスク174を所定速度で回転する機能を有する。
駆動部146は、電気モータ206及び伝動機構208を含んでいる。
伝動機構208は、円形穴180に隣接して形成したギヤ穴210内に直立する固定軸212に回転自在に取り付けた大径ギヤ214と一体の小径ギヤ216を含んでいる。
したがって、送出ディスク174は、電気モータ206によって伝動機構208を介して回転される。
制動部148は、所定数の球体Bが払い出された後、送出ディスク174を急速停止し、球Bが過払いされないようにする機能を有する。
したがって、制動部148は、同様の機能を有する他の装置に変更することができる。
スイッチングユニット222は、本実施例ではスイッチ224であるが、同様の機能を有する他のスイッチング手段に変更することができる。
スイッチ224が閉じられた場合(図9の状態)、給電回路218は、閉回路になり、モータ206が所定の方向に回転される。
このとき、電気ブレーキユニット220は開放回路のため機能しない。
スイッチ224が開放され、スイッチングユニット222が閉になった場合、電気ブレーキユニット220は閉回路になる。
電動モータ206は、閉状態の電気ブレーキユニット220によってショートされるため、発電機としての電動モータ206の負荷が最大になり、制動力が伝動機構208を介して送出ディスク174に加わる。
前記電気ブレーキユニット220のみで制動力が不足する場合、モータ206から押出ディスク164の間の伝動機構208に電磁ブレーキユニット、若しくは、機械的ブレーキユニットを追加し、又は、それらに置き換えることができる。
制動力が不足する場合とは、例えば、余計に球体Bが出口136から払い出される場合である。
案内部126は、送り出し部124によって送り出された球体Bを一列に整列して上方に案内する機能を有する。
出口通路204に案内パイプ230が接続されている。
案内パイプ230は、ほぼ水平の出口通路204からほぼ垂直方向に立ち上がる湾曲部232と垂直上方に伸びる直線部234とを含んでいる。
直線部234は、所定長さのパイプ片を所定数接続することにより、その長さを段階的に設定可能にすることが望ましい。
案内パイプ230の断面は、円形、三角形、四角形及び五角形であってもよい。
しかし、後述の球体磨き部等との関係で角形が好ましい。
球体磨き部236は、球体Bの案内機能と磨き機能とを有している。
球体磨き部236は、所定長さの角パイプ238及び球体磨き部材240とを含んでいる。
角パイプ238のパイプの通路254の寸法は、通路235と同一であるが、スパイラル状である。
このスパイラル状角パイプ238は、図10(C)に示すように、縦方向に二分割した部品を組み合わせて構成することにより、製造が容易である。
しかし、直線部234と同様直線的に形成することができる。
基材244は、樹脂により成型し、僅かに弾性を有している。
角パイプ238の角部250に基材244よりも僅かに小さい矩形の装着孔252を形成してある。
また、装着孔252を複数形成する場合、同一の角部250に形成すること、球体Bの進行方向に対し下流側にずれるよう螺旋状に形成すること、又は、ランダムに形成することができる。
結果として、球体Bがその方向に僅かずつ回動されるため、球体Bの全周をブラシ248によって磨くことができる効果がある。
しかし、基材244の背面をサポータ(図示せず)によって押さえることにより抜け止めをすることが好ましい。
換言すれば、ブラシ248が汚れ、又は、摩耗した場合、容易に交換することができる。
球体Bが球体磨き部236の球体通路254を通る場合、その周面はブラシ248の先端によって擦られる。
ブラシ248が螺旋状に配置された場合、ブラシ248から球体Bに進行方向線回りのトルクが付与されるので、球体Bはその方向に回るため、球体Bの全周を磨くことができる。
その空間に磨き部材240としてのブラシ248を配置することにより、特別な装置を設けること無く配置できる利点がある。
また、掻き落とされた油分等の塊がその空間を落下することが出来るので、排出物を効果的に排出することができる。
排出部260は、球体Bに付着しているゴミ等を案内部126から排出する機能を有する。
球体磨き部236の下流に排出部260が配置されている。
排出部260は、ループ状のパイプ262である。
したがって、排出孔266から球体Bに付着して来たゴミ等が離脱し、角部の空間を通ってループの最下部に落下し、さらに、排出孔266から落下することができる。
排出部260の下流に検出部128が配置されている。
検出部128は、払い出される球体Bを検出する機能を有する。
したがって、同様の機能を有する他の装置に変更することができる。
実施例の検出部128は、払出ベース270に形成された倒立J形の払出通路272、被動ローラ274、レバー276及びセンサ278を含んでいる。
通路272は通路235と同一寸法である。
被動ローラ274は、払出通路272に位置する待機位置と通路272外の被動位置に移動することができる。
換言すれば、被動ローラ274はスプリング286によって待機位置に向かって付勢され、払出ベース270のストッパ(図示せず)によって係止されて前述の待機位置に保持される。
被動ローラ274が払出通路272の外に押し出されたとき、したがって、レバー276が待機位置から所定角度回動された場合、レバ276の一端がセンサ278によって検知される。
検出部128は、払出ベース270を通路272の軸線回りに回動可能に設け、アクチュエータによって選択的に所定の位置に回動させることにより出口136の位置を変更することができる。
この場合、検出部128は、振り分け部134を兼ねることになる。
制御部130は、マイクロプロセッサ290であり、操作部106、センサ278及び賭球体検出部132から信号を受けとり、所定の処理を行った後、振り分け部134、球体送り出し装置120のモータ206及び制動部148を制御する機能を有している。
まずステップS11において、台間装置112の受け入れ口113に投入された現金又はプリペイドカードが識別される。
これら現金又はカードを識別した場合、購入可能な金額を判別し、ステップS12に進む。
購入ボタンが押された場合、ステップS13に進み、振り分け装置134を球体投入皿108側に切り換える。
次にステップS14において、送り出し部124のモータ206を起動する。
この処理と並行して受け入れた現金を収納し、又は、プリペイドカードに残金が記憶される。
送出ディスク174の回転により、その上に載っている多数の球体Bは、通孔162に落下する。
このため、送出ディスク174が高速回転しても通孔162には必ず球体Bが保留されているため、それら球体Bは歯抜けすることなく払い出だされる。
結果として、球体Bが攪拌され、通孔162に落下するので払出の効率が高まる。
したがって、保持空間176に球体Bが保留されない事態を防ぐことができるので、単位時間当たりの払出数を増加することができる。
その場合、球体Bは通孔162が十分に長いので、保持空間176に確実に落下する。
球体Bが通過した後、ローラ196、したがってレバー198はスプリング200によって元の位置に戻され、次の払出に備える。
したがって、球体Bが導出路190に戻ることはない。
送出ディスク174により順次送り出される球体Bは、湾曲部232、直線部234、球体磨き部236、排出部260及び検出部128の通路を一列に順次押し上げられ、被動ローラ274に達する。
被動ローラ274と球体Bとの接触部が直径部を超えた場合、スプリング286によってレバー276が待機位置へ急速に移動される。
これにより、球体Bは勢いよく出口136から払い出される。
レバー276の検知位置への移動により、センサ278が検知信号を出力する。
ステップS15において、この検知信号が計数され、ステップS16において所定の払出数と比較される。
ステップS16において所定の払出数になった場合、ステップS17に進み、モータ206が停止され、かつ、制動部148が作動される。
したがって、送出ディスク174は急速停止されるので、球体Bの過払出を生じない。
ステップS21において開始ボタンが押されない場合、ステップS11に戻る。
遊技開始ボタンが押された場合、ステップS22に進む。
ステップS22において、賭球体検出部134において所定数の賭球体を検出した場合、ステップS23に進み、遊技が開始される。
入賞しない場合、ステップS11に戻る。
入賞した場合、振り分け装置134を入賞球払出皿110側に切り換える。
次にステップS26においてモータ206を起動させ、前述のように出口136から球体Bを一個ずつ払い出す。
球体Bの通過毎にセンサ278から検知信号が発せられるので、ステップS27において検知信号が計数される。
ステップS28において、計数値が入賞所定値と一致した場合、ステップS29に進み、モータ206が停止され、かつ、制動部148が作動されて前述のように急速停止され、球体Bの過払いが防止される。
その後プログラムは、ステップS29からステップS11に戻る。
なお、保留ボウル122に球体Bの残量センサを設け、保留球体が所定量よりも減少した場合、外部の補給装置から球体Bの補給を受けるよう構成されている。
したがって、一つの球体送り出し装置のみ設置すればよいので、装置を小型にでき、かつ、安価であり、さらに、消費エネルギーも少ないという利点がある。
また、球体磨き部は案内装置の壁に取り付けられるので、特別な装置を設けないので小型に構成できる利点を有する。
さらに、球体磨き部は案内装置の壁に着脱可能であるので、球体磨き機能が低下した場合、直ぐさま交換可能である。
混入したゴミ等は、角パイプの角部空間に追いやられ、球体の通路から排除されるので、球体の移送を効率良く行うことができる。
球体磨き部は、角パイプと球体の間の空間に配置されるため、球体磨き部の設置用スペースを新たに設けなくともよいので、装置を小型化できる利点がある。
球体の周面が球体磨き部に対し移動するので、なんらの装置を設けずとも球体の全周を磨くことができる利点を有する。
ループ通路の底に内部のゴミが落下するので、底部に配置した排出孔から、球体磨き部によって球体表面から取り除いたゴミを落下させることができ、簡単な装置で通路内のゴミを排除することができる利点がある。
120 送り出し装置
122 保留ボウル
126 案内部
128 検出部
130 制御部
230 パイプ
236 球体磨き部
Claims (6)
- バラ積み状態で球体(B)を保留する保留ボウル(122)、
前記保留ボウルから球体を受け入れ、一つずつ強制的に送り出す送り出し装置(120)、
前記送り出し装置から送り出された球体を列にして上方に案内する案内部(126)、
前記案内部の出口に配置した検出部(128)、
前記検出部の検出に基づいて前記送り出し装置を停止する制御部(130)、
とを含む遊技機の球体送り出し装置。 - 前記案内部に球体磨き部(236)を着脱可能に取り付けた請求項1の遊技機の球体送り出し装置。
- 前記案内部が、断面角形のパイプ(230)である請求項2の遊技機の球体送り出し装置。
- 前記球体磨き部が、断面角形パイプの角部に配置されている請求項3の遊技機の球体送り出し装置。
- 前記案内部が、スパイラル状である請求項3の遊技機の球体送り出し装置。
- 前記案内部が、上下方向にループしている請求項2の遊技機の球体送り出し装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004119446A JP4941905B2 (ja) | 2004-04-14 | 2004-04-14 | 遊技機の球体送り出し装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004119446A JP4941905B2 (ja) | 2004-04-14 | 2004-04-14 | 遊技機の球体送り出し装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005296462A true JP2005296462A (ja) | 2005-10-27 |
| JP2005296462A5 JP2005296462A5 (ja) | 2007-05-24 |
| JP4941905B2 JP4941905B2 (ja) | 2012-05-30 |
Family
ID=35328715
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004119446A Expired - Fee Related JP4941905B2 (ja) | 2004-04-14 | 2004-04-14 | 遊技機の球体送り出し装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4941905B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008035945A (ja) * | 2006-08-02 | 2008-02-21 | Sankyo Kk | 遊技機 |
| JP2008035947A (ja) * | 2006-08-02 | 2008-02-21 | Sankyo Kk | 遊技機 |
| JP2008035946A (ja) * | 2006-08-02 | 2008-02-21 | Sankyo Kk | 遊技機 |
| JP2011092774A (ja) * | 2008-07-17 | 2011-05-12 | Fujishoji Co Ltd | 遊技機 |
| JP2014094063A (ja) * | 2012-11-08 | 2014-05-22 | Daito Hanbai Kk | 遊技球搬送装置 |
| JP2014111067A (ja) * | 2013-11-07 | 2014-06-19 | Sankyo Co Ltd | スロットマシン |
| JP2016052415A (ja) * | 2014-09-03 | 2016-04-14 | サクサ株式会社 | 球払出装置 |
| JP2016073767A (ja) * | 2016-01-07 | 2016-05-12 | 大都販売株式会社 | 遊技球搬送装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10249039A (ja) * | 1997-03-10 | 1998-09-22 | Ajina Giken Kk | パチンコ玉搬送装置 |
| JPH11244505A (ja) * | 1998-02-27 | 1999-09-14 | Sanyo Electric Co Ltd | パチンコ遊技装置のゴミ取り構造 |
| JP2002315864A (ja) * | 2001-04-23 | 2002-10-29 | Mirai Enterprises:Kk | 回胴式遊技機 |
| JP2003071113A (ja) * | 2002-07-18 | 2003-03-11 | Takeya Co Ltd | 玉磨き揚送装置 |
| JP2004081634A (ja) * | 2002-08-27 | 2004-03-18 | Ace Denken:Kk | 研磨装置および遊技装置 |
-
2004
- 2004-04-14 JP JP2004119446A patent/JP4941905B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10249039A (ja) * | 1997-03-10 | 1998-09-22 | Ajina Giken Kk | パチンコ玉搬送装置 |
| JPH11244505A (ja) * | 1998-02-27 | 1999-09-14 | Sanyo Electric Co Ltd | パチンコ遊技装置のゴミ取り構造 |
| JP2002315864A (ja) * | 2001-04-23 | 2002-10-29 | Mirai Enterprises:Kk | 回胴式遊技機 |
| JP2003071113A (ja) * | 2002-07-18 | 2003-03-11 | Takeya Co Ltd | 玉磨き揚送装置 |
| JP2004081634A (ja) * | 2002-08-27 | 2004-03-18 | Ace Denken:Kk | 研磨装置および遊技装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008035945A (ja) * | 2006-08-02 | 2008-02-21 | Sankyo Kk | 遊技機 |
| JP2008035947A (ja) * | 2006-08-02 | 2008-02-21 | Sankyo Kk | 遊技機 |
| JP2008035946A (ja) * | 2006-08-02 | 2008-02-21 | Sankyo Kk | 遊技機 |
| JP2011092774A (ja) * | 2008-07-17 | 2011-05-12 | Fujishoji Co Ltd | 遊技機 |
| JP2014094063A (ja) * | 2012-11-08 | 2014-05-22 | Daito Hanbai Kk | 遊技球搬送装置 |
| JP2014111067A (ja) * | 2013-11-07 | 2014-06-19 | Sankyo Co Ltd | スロットマシン |
| JP2016052415A (ja) * | 2014-09-03 | 2016-04-14 | サクサ株式会社 | 球払出装置 |
| JP2016073767A (ja) * | 2016-01-07 | 2016-05-12 | 大都販売株式会社 | 遊技球搬送装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4941905B2 (ja) | 2012-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JPH0581506A (ja) | コイン払出装置 | |
| US6656033B2 (en) | Coin dispensing apparatus for circulating overflowing coins | |
| JP4941905B2 (ja) | 遊技機の球体送り出し装置 | |
| US20030032387A1 (en) | Coin dispensing apparatus with removable auxiliary storage unit | |
| JP4047610B2 (ja) | メダル払出装置およびメダル払出装置用メダル落とし込み機構 | |
| JP2002119709A (ja) | パチンコ機の球排出装置 | |
| JP2744940B2 (ja) | 球体払出し装置 | |
| US7775863B2 (en) | Coin dispending device and method for rapidly recycling coins | |
| JP4665098B2 (ja) | 遊技機の球体送り出し装置 | |
| JP3563368B2 (ja) | パチンコ機の球制御装置 | |
| JP2004000809A (ja) | パチンコ機の球制御装置 | |
| JP2006000368A (ja) | 台間機用遊技メダルの一括投入機構 | |
| JP4318631B2 (ja) | 遊技機 | |
| EP0203779A2 (en) | Coin dispenser | |
| JP4344547B2 (ja) | 球払出装置 | |
| JP4635134B2 (ja) | 球体計数装置 | |
| JP2006055551A (ja) | 遊技機 | |
| JP3709771B2 (ja) | コイン払出装置 | |
| JPH1142360A (ja) | 遊技機島 | |
| JP2006271526A (ja) | 玉払出装置及び遊技機 | |
| JP4844155B2 (ja) | Icコイン処理装置 | |
| JP5028581B2 (ja) | 硬貨払出装置並びにその硬貨払出装置を用いた硬貨入出金機 | |
| JP4216755B2 (ja) | メダル貸し出し機 | |
| JP4810676B2 (ja) | 球体送り出し装置 | |
| JPS6246393A (ja) | コイン払い出し器の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070403 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070403 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100402 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110117 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120220 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120220 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4941905 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150309 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |