JP2004038245A - 車両用障害物検出装置 - Google Patents
車両用障害物検出装置 Download PDFInfo
- Publication number
- JP2004038245A JP2004038245A JP2002190391A JP2002190391A JP2004038245A JP 2004038245 A JP2004038245 A JP 2004038245A JP 2002190391 A JP2002190391 A JP 2002190391A JP 2002190391 A JP2002190391 A JP 2002190391A JP 2004038245 A JP2004038245 A JP 2004038245A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- obstacle
- steering angle
- detection device
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





























Abstract
【解決手段】舵角に基づいて自車両の進路を推定し(ステップS1〜S3)、この自車両の進路から、右及び左方向に、ドライバが常用する操舵角変化量に応じた所定の変化量だけ操舵を行ったときの車両の進路を予測する。そして、これら予測した左及び右方向への車両の走路が重なる領域を要注意領域E*とする(ステップS4)。この要注意領域E*内に検知物体が存在する場合に、その検知物体と自車両との距離及び相対速度に基づいて衝突判断を行い、これがしきい値よりも小さいとき警報を発生し(ステップS6〜S9)、逆に、検知物体が要注意領域E*内に存在しない場合には、警報を発生させない(ステップS10)。
【選択図】 図5
Description
【発明の属する技術分野】
この発明は、先行車両等の障害物を検出し、自車両が、この障害物と接触する可能性を判断するようにした車両用障害物検出装置に関する。
【0002】
【従来の技術】
従来、自車両が自車前方物体と接触することを防ぐ目的でドライバへの警報、或いは減速制御などを行うため、自車両前方の障害物を検出する方法として数々提案されている。
例えば、特開平7−104062号公報には、レーザレーダ、或いは電波式レーダなどによって自車両前方の物体を検知するとともに、自車両のヨーレート、車速などの運動情報に基づいて自車両の将来の走路を予測し、自車両の予測走路と前方物体との位置関係から、将来の接触可能性を算出するようにした方法が提案されている。
【0003】
そして、算出された接触可能性に基づいて警報、或いは速度制御を行うことで、自車両が自車両前方の物体と接触する可能性を精度良く判定し、これを防止するようにしている。
【0004】
【発明が解決しようとする課題】
しかしながら、前述の特開平7−104062号公報に記載の方法にあっては、現在の運動状態がそのまま継続するとの仮定のもとに、接触可能性を算出している。このため、ドライバが操舵操作を加えた場合には、自車両の将来の走路の予測結果と、実際の走路とが異なってしまうため、接触可能性の判断が適切でないものとなってしまう可能性がある。
【0005】
つまり、自車両が右カーブに差しかかろうとしている状態で、このカーブの左路側に車両が停止している場合、自車両に搭載された障害物検知センサが前方の停止車両を発見するが、自車両がカーブに入る以前の直進状態では、カーブの旋回方向にしたがった操舵が開始されていないことから自車両の走路は直線であると予測されるため、前記停止車両は、自車両にとって接触する可能性が高い物体と判断されることになる。しかしながら、通常、自車両を運転しているドライバは、道路形状を認識しこれに沿った走行をするから、ドライバが操舵を行い、旋回を開始しようとしているときに、衝突警報が報知されたり、或いは、速度制御が行われたりすることになる。このように、ドライバの意に反した制御がなされると、ドライバにとってこのシステムは煩わしいものとなってしまう可能性がある。
【0006】
また、例えば自車両が直進路を走行している状態で、その前方の路肩に車両が駐車している場合等においては、自車両の障害物検知センサが前方の駐車車両を発見し、これが自車両の予測進路上にあることから、警報又は速度制御を行うことになる。しかしながら、このような道路環境では、通常、ドライバは自車両の走行位置を若干右側に変更することで回避することから、この場合においてもドライバの意に反した制御が行われることになる。
【0007】
そこで、この発明は、上記従来の未解決の課題に着目してなされたものであり、自車両前方の物体との接触の可能性判断をより的確に行うことの可能な、車両用障害物検出装置を提供することを目的としている。
【0008】
【課題を解決するための手段】
上記目的を達成するために、本発明に係る車両用障害物検出装置は、自車両前方に判断領域を想定し、自車両前方に物体を検知した場合には、この検知物体と想定した判断領域との位置関係を用いて、自車両が検知物体と接触する可能性を判断するが、このとき、判断領域を、自車両の進路と、自車両が現時点以後に取り得ると予測される運動状況とに応じて設定する。
【0009】
つまり、例えば、自車両前方道路端に障害物が存在するような場合、通常ドライバはこれを回避するために例えば操舵を行う等といった回避動作を行うため、自車両が障害物に接触する可能性は小さい。
ここで、前記判断領域は、自車両の進路と、自車両が現時点以後に取り得ると予測される運動状況とに応じて設定され、比較的自車両に近い自車両前方道路端に障害物が存在するような場合であっても、障害物の検知位置が判断領域内に含まれない場合には、接触する可能性が高いとは判断されないから、接触の可能性が低いのにも関わらず、障害物と接触する可能性が高いと誤検知されることが回避される。
【0010】
【発明の効果】
本発明による車両用障害物検出装置によれば、自車両前方に判断領域を想定し、自車両前方に物体を検知した場合には、この検知物体と想定した判断領域との位置関係を用いて、自車両が検知物体と接触する可能性を判断するが、このとき、判断領域を、自車両の進路と自車両が現時点以後に取り得ると予測される運動状況とに応じて設定するようにしたから、接触の可能性判断をより的確に行うことができる。
【0011】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて説明する。
まず、本発明の第1の実施の形態を説明する。
図1は、本発明を適用した車両用障害物検出装置の一例を示すブロック図である。
【0012】
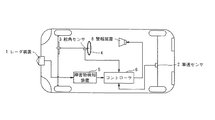
図中1は、自車両前方の障害物を検出するためのレーダ装置であって、例えば、車幅中央の、車両前方の障害物を検出することの可能な位置に設けられている。また、図中、2は、従動輪である後輪の回転速度から自車両の走行速度Vhを検出する車速センサである。また、3は、ステアリングホイール4の操舵角δを検出する舵角センサである。
【0013】
そして、これら各センサで検出された検出信号は、障害物検知装置5及びコントローラ6に必要に応じて入力され、障害物検知装置5では、前記レーダ装置1の検出結果に基づいて自車両前方の障害物の有無を検出し、その検出結果を前記コントローラ6に通知する。前記コントローラ6は、障害物検知装置5での障害物の検出結果、舵角センサ3で検出した操舵角δ、車速センサ2で検出した車速Vhに基づいて、自車両の、障害物との衝突の可能性の判断を行い、その結果に応じて乗員に注意を促すための警報を発するかどうかを判断し、警報を発生する必要があると判断されるときには、警報装置8を作動させるようになっている。
【0014】
前記レーダ装置1は、例えば、赤外レーザを使った光式のレーダ装置であって、図2に示すように、赤外レーザ光を発する発光部1aと、反射光を受光して所定の電圧を出力する受光部1bとを備え、計測部1cにおいて、発光から受光までの時間差に基づき、前方物体までの距離を計測するようになっている。また、発光部1aには、スキャニング機構が組み合わされており、所定角度範囲内で、順次角度を変化させながら発光するようになっている。
【0015】
そして、前記計測部1cでは、各スキャニング位置について、反射光を受光したか否かの判定を行い、反射光を受光した場合には、発光から受光までの時間差に基づき前方物体までの距離を算出する。また、物体が検出されたときのスキャニング角と前記物体までの距離とに基づき、自車両に対する前方物体の左右方向の位置を検出し、前方物体の自車に対する相対的な位置を確定するようになっている。そして、この処理を各スキャニング位置において行うことで、例えば図3に示すように、車両前方における平面的な物体の存在状態図を生成するようになっている。
【0016】
また、前記障害物検知装置5は、レーダ装置1で得られた物体の存在状態図に基づき、これをスキャニング周期毎に比較することで、検出された各物体の動きを判別すると共に、検出された物体間の近接状態、動きの類似性等に基づいてこれらが同一物体であるか異なる物体であるかを判別する。そして、障害物情報として、自車両から各検知物体までの前後方向距離(車間距離方向)X〔m〕、左右方向距離(横方向)Y〔m〕、物体幅W〔m〕、相対速度Vr〔m/s〕、を所定の時間周期で出力する。
【0017】
なお、ここでは、前記レーダ装置1として、赤外レーザを使った光式のものを適用した場合について説明するが、これに限るものではなく、例えば、マイクロ波、ミリ波などを使った電波式のものであっても良いし、また、レーダ装置に限らず、ビデオ画像を処理することによって前方の障害物を検出するものであっても良い。また、前記警報装置8としては、警報音を発するようになっているものを用いているが、警報音を発するものに限らず、ドライバの前方位置に警報表示するものや、ペダル、ステアリング、シート類に振動を発生させることで注意を喚起するものなどであっても適用することができる。
【0018】
図4は、コントローラ6の機能構成を表す機能ブロック図であって、コントローラ6は、車速センサ2で検出された車速Vh及び舵角センサ3で検出された操舵角δに基づいて、自車両の今後の進路を予測する自車進路計算部11と、自車進路計算部11で予測された自車予測進路に基づいて、自車予測進路上に障害物が存在する場合に、自車両が操舵によってこの障害物を回避することが困難であると予測される要注意領域E*を設定する路上領域算出部12と、障害物検知装置5からの障害物情報に基づいて、路上領域算出部12において設定した要注意領域E*内に障害物が存在するかどうかを判定する領域判断処理部13と、領域判断処理部13での判断結果に基づいて、警報を発するかどうかを判断する警報判断処理部14と、を備えている。
【0019】
図5は、コントローラ6で実行される、警報発生処理の処理手順の一例を示すフローチャートである。この警報発生処理は、予め設定された所定周期で割り込みによって実行されるようになっている。
そして、まず、ステップS1で、前記車速センサ2及び舵角センサ3から車速及び舵角データの読み込みを行う。前記車速センサ2、舵角センサ3は、それぞれ回転に応じた所定間隔のパルスを出力するエンコーダで構成され、パルス数をカウントし、これを積算することで車速Vh(m/s)、操舵角δ(rad)が計算され、この結果がメモリに格納されるようになっている。
【0020】
次いで、ステップS2に移行し、障害物検知装置5における検知結果、すなわち、自車両から各検知物体までの前後方向距離(車間距離方向)X〔m〕、左右方向距離(横方向)Y〔m〕、物体幅W〔m〕、相対速度Vr〔m/s〕の読み込みを行う。ここで、障害物検知装置5と、コントローラ6との間の情報交換は、シリアル通信のような、一般的な通信処理に従って行うことが可能である。これらの情報も同様に、メモリに格納される。
【0021】
次いで、ステップS3に移行し、車速Vh及び、操舵角δに基づいて自車進路予測を行う。
ここで、車速Vh及び操舵角δに応じて車両の旋回曲率ρ(1/m)を与える式は一般に良く知られており、次式(1)から算出することができる。
【0022】
【数1】

【0023】
この(1)式から、旋回半径Rは、次式(2)として定めることができる。
R=1/ρ ……(2)
したがって、自車両の予測進路は、図6に示すように、自車両位置から、自車両の進行方向と鉛直方向に距離Rだけ離れた位置にある点Q(図6の場合には、右方向にRだけ離れた位置にある点)を中心とした、半径Rの円弧として予測される。
【0024】
なお、前記操舵角δは、右方向に操舵された場合に正値、左方向に操舵された場合に負値をとるものとし、旋回曲率ρ、旋回半径Rについても、これらが正値をとる場合には右旋回、負値をとる場合には左旋回を意味するものとする。
ここで、このようにして求められた、図6に示すような軌跡は、あくまで自車両の進行方向を予測したものであり、自車両が走行するであろう領域、すなわち、予測走路は、図7に示すように、この軌跡に、自車両の車幅もしくは車線幅を考慮したものとなる。図7は、図6に示す予測軌跡に、自車両の車幅Twを加えたものであり、この場合、予測走路は、上記予測進路と同一点Qを中心とし、半径がR−Tw/2の円弧と、半径がR+Tw/2の円弧に囲まれる領域となる。
【0025】
なお、ここでは、自車両の予測進路として旋回半径Rを、車速Vhと操舵角δとを用いて算出する場合について説明したがこれに限るものではない。例えば、車両に発生するヨーレートを検出するヨーレート検出手段を設け、前記車速Vhと操舵角δとから予測進路を算出する代わりに、前記ヨーレート検出手段で検出したヨーレートrと自車速Vhとから、次式(3)にしたがって、旋回半径を算出するようにしてもよい。
【0026】
R=Vh/r ……(3)
また、例えば、車両に発生する横加速度を検出する横加速度検出手段を設け、この横加速度検出手段で検出した横加速度Ygと自車速Vhとから、次式(4)に基づいて旋回半径Rを算出するようにしてもよい。
R=V2/Yg ……(4)
次いで、ステップS4に移行し、領域設定処理を行い、図7に示す予測走路に対して、自車の操舵角が変化し得る範囲dδを考慮に入れて、走行路上に、後述の要注意領域E*を設定する。
【0027】
ここで、現在の操舵角δに対し、自車の操舵角が±dδの範囲で変化し得る場合、操舵角は、δ−dδ〜δ+dδの範囲となる。この範囲の上限(δ+dδ)の操舵を行って自車両が走行すると仮定した場合、図8に示すように、予測される旋回半径は、δ+dδを用いて上記と同様にして算出されるR1となり、予測される進路は、自車両位置から、自車両の進行方向と鉛直方向に距離R1だけ離れた位置にある点Q1を中心とした、半径R1の円弧として定められる。また、範囲の下限(δ−dδ)の操舵を行って自車両が走行すると仮定した場合、予測される旋回半径は、δ−dδを用いて上記と同様に算出されるR2となり、予測される進路は、自車両位置から自車両の進行方向と鉛直方向に距離R2だけ離れた位置にある点Q2を中心とした、半径R2の円弧として定められる。
【0028】
これらの進路に対して、上記と同様に自車両の車幅Twを考慮して、走路を求めることによって、図9に示すように、二点鎖線で示す旋回半径をR1とする走路m1、及び一点鎖線で示す旋回半径をR2とする走路m2を得ることができる。そして、図10に示すように、上述のようにして得られた、走路m1の左側境界と走路m2の右側境界とによって囲まれる領域を、要注意領域E*として設定する。すなわち、この要注意領域E*は、±dδの範囲の修正操舵では回避することができない領域を示していることになる。
【0029】
ここで、前述の自車両の操舵角が変化し得る範囲dδは、ドライバが常用的に使用する修正操舵の範囲を車速に応じて定めたものであり、例えば図11に示すように、車速Vhが高くなるにつれて操舵角の範囲dδは減少するように定められている。なお、図11において、横軸は、車速Vhを表し、縦軸は、自車両の操舵角が変化し得る範囲dδを表す。
【0030】
さらに具体的には、前記dδは、各車速において、常用的範囲内の横加速度(例えば、1〔m/s2〕)を発生させる操舵角範囲として定めることが可能であり、この場合は、前記(1)式の旋回曲率ρと操舵角δとの関係式を用いて、次式(5)から算出することができる。
【0031】
【数2】
このようにして、要注意領域E*を設定すると、続いてステップS5に移行し、検知物体の領域内外判定処理を行う。この領域内外判定処理では、障害物検知装置5により検出された各検知物体の位置を、上記要注意領域E*と比較し、各検知物体が要注意領域E*内にあるか、要注意領域外にあるかを判断する。
【0032】
例えば、図12は、検知物体q1〜q4が検知されている状態を示しているが、この場合、検知物体q1、検知物体q2、検知物体q4は要注意領域E*外の物体であり、検知物体q3は要注意領域E*内の物体であると判断する。
そして、ステップS5の処理での判断の結果、障害物検知装置5から通知された検知物体のうち、何れかが、要注意領域E*内に存在すると判断された場合には、ステップS6からステップS7に移行し、要注意領域E*内に存在すると判断された検知物体について、自車両との車間距離(すなわち、検知物体の前後方向位置X)と、相対速度Vrに基づいて衝突時間(=X/Vr)を算出する。そして、算出した衝突時間が、予め設定したしきい値を下回るかどうかを判断し、衝突時間がしきい値を下回る検知物体がある場合には、ステップS9に移行し、警報装置8に対し、警報を発生させる旨の指令を出力する。そして、障害物検出処理を終了する。なお、前記衝突時間の判断に用いるしきい値は、検知物体と衝突する可能性が高く緊急に衝突回避操作を行う必要があるとみなすことの可能な値に設定される。
【0033】
一方、ステップS8の処理で、要注意領域E*内に存在する検知物体について全ての検知物体の衝突時間がしきい値を下回らないとき、また、前記ステップS6の処理で、障害物検知装置5から通知された検知物体すべてが、要注意領域E*外であると判断された場合、また、障害物検知装置5において物体が検知されないときには、そのままステップS10に移行し、警報装置8に対して警報を発生させる旨の指令を出力している場合には、警報を停止させる旨の指令を出力し、また、警報を発生させる旨の指令を出力していない場合には、引き続きこの指令を出力せず、警報の発生は行わない。そして、障害物検出処理を終了する。
【0034】
次に、上記第1の実施の形態の動作を説明する。
コントローラ6では、前記障害物検出処理を所定周期で実行し、舵角δ、車速Vhに基づき、自車両の進路を推定しこれに基づき予測走路を推定する(ステップS3)。さらに、車速Vhに基づき操舵角が変化し得る範囲dδを求め、これに応じて、操舵角が現在の操舵角δよりも+dδ及び−dδだけ変化したときの予測走路m1及びm2を設定し、これに基づき要注意領域E*を設定する(ステップS4)。
【0035】
そして、車両前方に障害物が存在しない場合には、障害物検知装置5において、物体が検知されないから、ステップS5からステップS6を経てステップS10に移行し、警報装置8は作動されない。
この状態から、自車両がカーブに差しかかり、図13に示すように、このカーブ路の左路側に車両が停止している場合、自車両がカーブに進入する以前の直進走行している時点で、自車両のレーダ装置1は、この停止車両を検知する。このとき、自車両は、まだ直進走行をしているから、車速、舵角から予測される自車進路は、図13に破線で示すように直進方向となり、自車両の予測される進路上にレーダ装置1が存在すると判定されることになる。
【0036】
しかしながら、図14(a)に示すように、停止車両は、ドライバが操舵を行ったとしても回避することができないと予測される要注意領域E*外に存在するから、ステップS6からステップS10に移行し、警報は発生されない。
そして、この状態からドライバが操舵を行い自車両がカーブ路に進入すると、自車両は停止車両に接近することになるが、自車両が操舵を行ったことから、図14(b)に示すように、要注意領域E*はその操舵角に応じて現時点での進路に対して右寄りに設定されるから、停止車両は、この要注意領域E*外となり、引き続き警報は発生されない。
【0037】
このとき、ドライバの操舵操作が遅れ、停止車両が要注意領域E*内に含まれる状態となると、ステップS6からステップS7に移行し、衝突時間が算出され、この衝突時間がしきい値を下回る状態となったときにステップS8からステップS9に移行し、警報が発生される。
したがって、自車両前方のカーブ路に停止車両が存在する状態であっても、自車両が操舵を行ってカーブ路に進入しこのカーブ路に沿って走行している間は、警報が発生されることはない。
【0038】
また、例えば図15に示すように、直進路に続くカーブ路路肩に障害物が存在する場合には、現在の車速、舵角に基づいて自車進路を予測した場合、自車両が直進路走行している状態で、この時点における車速、舵角に基づいて自車進路が予測されるため、自車両の進路上に障害物が位置すると判断されることになる。従来の方法の場合、自車両進路上に障害物が位置することから、警報を発することになる。
【0039】
しかしながら、上記第1の実施の形態においては、ステップS6の処理では、図16に示すように、障害物が、要注意領域E*外にあると判定され、操舵操作によって障害物を回避することができると判定される領域にあるときには警報を発生させず、障害物を操舵操作によって回避することができないと予測される領域内に存在するときにのみ警報を発生させるようにしているから、真に必要なときにのみ警報を発生させることができる。したがって、従来のように、ドライバが障害物を認識しこれを回避するための操舵操作を行うため、障害物との衝突の可能性が低いのにも関わらず警報が発せられるといったことはなく、ドライバに与える煩わしさ感、違和感を低減することができる。
【0040】
また、このとき、要注意領域E*をドライバが常用する領域の操舵角変化を基準として設定し、すなわち、障害物を容易に回避できる領域と回避が容易でない領域とを設定し、各障害物がどの領域に属するかに基づいて自車両に対する衝突の可能性を判断するようにしたから、容易に回避できる物体に対して警報を発するといったことを回避することができ、ドライバ毎の操舵特性に応じて警報を発生させることができる。
【0041】
また、路側車両等に極端に接近した場合には、障害物が、要注意領域E*内に存在し、自車両がこの障害物を容易に回避できないと判断されて、警報が発せられるため、警報装置としての効果が損なわれることもない。
また、上述のように要注意領域E*として、右操舵及び左操舵を行ったときの走行領域において重畳する領域つまり、±dδの範囲の修正操舵では回避することができない可能性が高い領域を設定するようにしているから、不必要に衝突判断が行われることを回避し、的確に衝突判断を行うことができる。
【0042】
なお、ここでは、要注意領域E*を、左右方向に操舵を行ったときの走行領域に基づいて設定するようにした場合について説明したが、これに限るものではなく、障害物が自車両近傍に位置するほどこれを回避することが困難であり、自車両から離れるほど障害物を回避することが可能であるから、自車両前方ほど、その車幅方向の幅が広くなり、且つ自車両から離れるほどその幅が狭くなるように設定するようにすればよい。
【0043】
また、上記第1の実施の形態においては、一つの物体を検知した場合について説明しているが、複数の検知物体を検知した場合であっても適用することができ、この場合には、要注意領域E*内に存在する検知物体について衝突判定を行い、何れかの検知物体が衝突する可能性があると判断される間は、警報を継続して発生させ、全ての検知物体が衝突する可能性がないと判断されるときに警報を解除するようにすればよい。
【0044】
また、上記第1の実施の形態においては、要注意領域E*として、操舵角範囲dδに基づく一つの要注意領域E*を設定し、この領域の内外判断によって障害物との接触の可能性を判断するようにした場合について説明したが、上記操舵角範囲を複数(例えば、dδ1、dδ2)を用意し、図17に示すように、操舵角の範囲dδ1、dδ2のそれぞれについて要注意領域E1*、E2*を設定することで、より詳細な領域判断を行うことも可能である。この場合の警報判断としては、それぞれの要注意領域E1*、E2*に応じた係数kを、例えば、次式(6)に示すように設定し、この係数kを、ステップS7で算出した衝突時間に乗じた後に、ステップS8でしきい値と比較し、警報を発生させるかどうかを判断するようにすればよい。
【0045】
【数3】
【0046】
また、上記第1の実施の形態においては、要注意領域E*を設定する際に、操舵角が変化する範囲として、切り増し側、切り戻し側も同等として、δ−dδ〜δ+dδ、という範囲を設定した場合について説明したがこれに限るものではない。つまり、例えば旋回中の場合、ドライバにとっては切り増し方向の操舵、すなわち横加速度が増大する方向への操舵よりも、切り戻し方向の操作、すなわち横加速度が減少する方向への操舵の方が容易である。これを考慮して、切り戻し方向の変化量を切り増し側に対して大きく設定することも可能である。例えば、ある操舵角δ(>0、右旋回)で旋回している場合には、上記範囲を、次式(7)に示すように定める。
【0047】
δ−dδout〜δ+dδin(dδout>dδin) ……(7)
そして、これに基づき要注意領域Ed*を設定すると、これは図18に示すように、切り増し側及び切り戻し側とも同じ操舵量dδである場合の要注意領域E*に対し、切り戻し側の操舵量dδを切り増し側よりも大きく定めた場合の要注意領域Ed*の方が、カーブ外側よりに設定される。したがって、横加速度を高めることなく回避可能なカーブ内側の物体よりも、横加速度を高めなければ回避できないカーブ外側の物体の方が、警報が発生されやすくなるため、よりドライバが感じる接触の可能性の高さに則して、警報を発生させることができる。
【0048】
次に、本発明の第2の実施の形態を説明する。
この第2の実施の形態は、上記第1の実施の形態において警報を発生させる代わりに、制動力を発生させるようにしたものである。なお、上記第1の実施の形態と同一部には、同一符号を付与しその詳細な説明は省略する。
すなわち、図19に示すように、第2の実施の形態における車両用障害物検出装置は、図1に示す第1の実施の形態における車両用障害物検出装置において、警報装置8に替えて、制動力制御装置9が設けられ、コントローラ6では、接触判断を行いその結果に応じて制動力を発生させるようになっている。そして、この制動力制御装置9では、コントローラ6からの制動力指令出力に基づき、図20に示すように、制動力指令出力に比例した制動力を発生するよう、公知の手順で、制動力制御を行うようになっている。なお、図20において、横軸は、コントローラ6からの制動指令出力、縦軸は、制動力制御装置9において発生すべき制動力を表す。
【0049】
図21は、コントローラ6において実行される制動力制御処理の処理手順の一例を示すフローチャートであって、上記第1の実施の形態における警報発生処理の処理手順と同一部には、同一符号を付与しその詳細な説明は省略する。
図21に示すように、上記第1の実施の形態と同様に処理を行って衝突の可能性を判断し(ステップS1〜ステップS8)、ステップS8の処理で、衝突時間がしきい値を下回り、衝突する可能性が高いと判断される場合には、ステップS11に移行し、前記制動力制御装置9に対し、制動力指令を出力する。一方、検知物体が要注意領域内E*内に存在するが衝突時間がしきい値を下回らないとき、また、ステップS6の処理で、検知物体が、要注意領域E*外に存在するときには、ステップS12に移行し、制動力の発生を解除又は制動力を発生させない。
【0050】
前記障害物との接触を防ぐための制動力を算出する方法としては、さまざまな方法が提案されているが、例えば、相対速度を衝突時間で除して目標減速度(=相対速度/衝突時間)を算出し、この目標減速度を発生し得る制動力を算出するようにすればよい。
このようにすることによって、操舵により容易に回避することができない領域に存在する物体に対してのみ接触可能性の判断を行い、この接触可能性が高い場合には障害物と同等の速度まで自車速を減速するよう制動力制御が行われるため、ドライバにとって煩わしい制御介入が行われることがないと共に、接触の可能性の高い状態では、的確に減速を行って前方障害物との接触を防止することができる。
【0051】
なお、上記第2の実施の形態においては、警報を発する代わりに制動力を発生させるようにした場合について説明したが、上記第1の実施の形態と組み合わせ、図19において、さらに警報装置8を設け、図21のステップS8の処理で衝突時間がしきい値を下回り衝突する可能性が高いと判断されるときには、警報を発生させると共に制動力を発生させ、逆に衝突時間がしきい値を下回らないとき、また、ステップS6の処理で検知物体が要注意領域E*外に存在するときには、警報及び制動力の発生を停止させるようにしてもよい。このようにすることによって、自動的に制動力を発生させるだけでなく、ドライバに注意を促すことができ、より効果的である。
【0052】
次に、本発明の第3の実施の形態を説明する。
この第3の実施の形態は、上記第1の実施の形態において、図22に示すように、さらに、路面状態を検知する路面状態センサ10を追加したものである。
この路面状態センサ10は、例えば、路面の光反射率に基づき路面状態を4つの段階、つまり、a:乾燥アスファルト、b:湿潤路、c:積雪路、d:凍結路に判別し、この結果をコントローラ6に対して出力するようになっている。
【0053】
そして、コントローラ6では、この路面状態に応じて、操舵角変化範囲dδを補正し、補正した操舵角変化範囲dδに基づいて、要注意領域E*の設定を行う。すなわち、第2の実施の形態における警報発生処理の処理手順を示す図23のフローチャートに示すように、ステップS1aの処理で、舵角δ、車速Vhと共に、路面状態センサ10の検出データを読み込む。そして、障害物検知装置5から障害物データを読み込み、自車両の進路を推定した後(ステップS2、S3)、ステップS3aに移行し、路面状態センサ10で検出した路面状態に応じた補正係数kを設定する。
【0054】
この補正係数kは、例えば、路面状態が、a:乾燥アスファルトの場合にはk=1.0、b:湿潤路の場合にはk=0.5、c:積雪路の場合にはk=0.3、d:凍結路の場合にはk=0.1に設定する。
そして、ステップS4aに移行し、要注意領域E*の設定を行うが、このとき、操舵角変化範囲dδに補正係数kを乗算し、操舵角の範囲を、δ−k×dδ〜δ+k×dδとして、要注意領域E*の設定を行う。そして、以下上記第1の実施の形態と同様に、処理を行う。
【0055】
したがって、図24に示すように、路面状態に応じて異なる領域が要注意領域E*として設定されることになり、滑りやすい路面ほど、操舵角の範囲がより狭くなり、すなわち、要注意領域E*が広くなる。つまり、例えば図24に示すように、乾燥アスファルト路での要注意領域Ea*に比較して湿潤路での要注意領域Eb*の方が広くなり、より広い範囲内に存在する検知物体に対して警報を発するように作用するため、より早い段階で、警報が発生されることになって、ドライバに与える安心感を高めることができる。
【0056】
なお、上記第3の実施の形態においては、路面状態を検出するセンサとして路面状態センサを用いた場合について説明したが、これに限るものではない。例えば、自車両で制動或いは駆動制御した際の車輪のスリップ状態に基づいて路面状態を判断する方法を用いてもよく、また、路側に設けられた情報提供システムから提供をうけ、これに基づいて路面状態を判断するようにしてもよい。
【0057】
また、この第3の実施の形態は、上記第1の実施の形態において、さらに路面状態センサ10を設けた場合について説明したが、前記第2の実施の形態に適用してもよく、また、上記第1から第3の実施の形態を組み合わせるようにしてもよい。
次に、本発明の第4の実施の形態を説明する。
【0058】
この第4の実施の形態は、上記第1の実施の形態において、障害物と自車両との間の相対速度Vrが所定のしきい値より大きいかどうかを判断し、相対速度が大きいものについてのみ、領域判断を行うものである。
つまり、第4の実施の形態における警報発生処理の処理手順を示す、図25のフローチャートに示すように、上記第1の実施の形態と同様に、舵角δ、車速Vh、障害物データ等を読み込み(ステップS1、S2)、自車進路を推定した後(ステップS3)、ステップS21に移行し、障害物検知装置5からの自車両と検知物体との相対速度Vrが、しきい値よりも大きいかどうかを判断する。このしきい値は、自車速Vhに基づきこれよりもやや低い車速値(例えば、自車速の80%程度)として定められるものである。前記相対速度Vrがしきい値よりも大きいときには、この検知物体は、ほぼ停止しているか、極低速で移動しているとみなし、ステップS4に移行して、以後、上記第1の実施の形態と同様に処理を行い、必要に応じて警報を発生させる。
【0059】
一方、前記ステップS21の処理で、相対速度Vrがしきい値より大きい場合には、ステップS22に移行し、ステップS3で推定した推定進路に基づいて、この検知物体が、自車の走路上にあるか否かを判断し、自車の走路上にあると判断されるとき、ステップS23に移行し、この検知物体について車間時間(=車間距離/自車速度)を算出する。そして、ステップS24に移行し、この車間時間を予め設定したしきい値と比較し、車間時間がしきい値よりも小さいときには、ステップS25に移行し、警報を発生させる。なお、前記しきい値は、例えば通常運転時の各車速に応じた車間距離から算出される値に対してやや短い値に設定される。
【0060】
一方、前記ステップS22の処理で、検知物体が自車両の推定進路上にないと判断されるとき、また、検知物体との車間時間が、しきい値を上回るときには、ステップS26に移行し、警報を発生させない。なお、他の検知物体について警報を発生させている場合には、継続して警報を発生させる。
したがって、例えば図26に示すように、自車前方に路側停止車両(前方車両c1)と走行している前方車両(前方車両c2)が存在している場合に、停止している前方車両c1については警報の発生を抑制しつつ、走行している前方車両c2については、接触の可能性の高い領域に入る以前からこれを追跡し、車間時間が所定のしきい値を下回ったときには適切に警報を発することが可能となる。
【0061】
なお、上記第4の実施の形態においては、上記第1の実施の形態に適用した場合について説明したが、上記第2の実施の形態に適用することも可能であり、また、上記第4の実施の形態にさらに上記第2の実施の形態を組み合わせて必要に応じて制動力を発生させるようにしてもよく、また、上記第1及び第3及び第4の実施の形態、さらに、第2及び第3及び第4の実施の形態、第1から第4の実施の形態、をそれぞれ組み合わせるようにしてもよい。
【0062】
なお、上記各実施の形態においては、要注意領域E*を設定する際の自車両の走行路幅Twを固定値として扱ってきたが、この値を可変とすることも可能である。例えば、路側の停止車両の脇を通過する際、自車速が低速の場合には、比較的狭い間隔で通過することが可能であるが、高速の場合には、十分に広い間隔を確保して通過する必要がある。これを考慮して、例えば図27に示すように、車速に応じて幅Twの値を変化させるようにしてもよい。つまり、車速Vhがしきい値V1を超えるまでの間は、幅Twは比較的小さいTw1に設定し、車速Vhがしきい値V1から増加するとこれに比例して幅Twも増加し、車速Vhがしきい値V2を超えると、比較的大きいTw2に設定する。なお、図27において、横軸は、車速Vh、縦軸は、幅Twを表す。
【0063】
このように、幅Twを変化させることによって、要注意領域E*は、図28に示すように、高速時ほど広くなり、逆に低速時ほど狭い領域が設定されることになる。
したがって、各車速域に応じてより適切に、要注意領域E*を設定することができる。
【0064】
また、上記各実施の形態においては、操舵角変化範囲dδを考慮するにあたって、直ちに自車の進路が変更されるとみなして、予測走路の算出を行うようにしているが、実際にはドライバの反応遅れ、操作遅れ、および車両の応答遅れがあることを考慮すると、この遅れ時間分の間、自車両は現在の運動を継続し、その遅れ時間の後に、上記操舵角変化に伴う進路変化が生じると考えられる。したがて、この遅れ分を考慮して、要注意領域E*を設定するようにしてもよい。
【0065】
つまり、前述のように、操舵角変化範囲dδを考慮した進路の変化幅は、図29に示すように、自車両から車両進行方向に対して鉛直方向に距離R1離れた点Q1を中心とした半径R1の円弧、及び、自車両から車両進行方向に対して鉛直方向に距離R2離れた点Q2を中心とした半径R2の円弧で定められたものであるから、これらの円弧を、自車両から車両進行方向に対して鉛直方向に距離R離れた点Qを中心として、所定角度回転させ、これら円弧によって特定される走行路に基づいて、要注意領域E*を設定する。前記回転角θは、車速Vh、考慮すべき遅れ時間ΔT、車速Vh及び舵角δから予測された旋回半径Rに基づき、次式(8)から算出することができる。
【0066】
θ=Vh・ΔT/R ……(8)
このようにすることによって、図30に示すように、ドライバの反応遅れ、操作遅れ、および車両の応答遅れ等を考慮して、予測される走路の範囲、およびそれに従って領域設定がなされるため、より的確に前方の物体との接触可能性を判定することができる。
【0067】
ここで、上記各実施の形態において、レーダ装置1が物体検知手段に対応し、車速センサ2が車速検出手段に対応し、路面状態センサ10が路面摩擦係数検出手段に対応し、図5のステップS3の処理が進路検出手段に対応し、ステップS4の処理が領域想定手段に対応し、ステップS6の処理が判定手段に対応し、障害物検知装置5が相対速度検出手段に対応している。
【図面の簡単な説明】
【図1】第1の実施の形態を適用した車両用障害物検出装置の一例を示す概略構成図である。
【図2】本発明に適用したレーダ装置の動作説明に供する説明図である。
【図3】レーダ装置による検知物体の存在状態図の一例である。
【図4】第1の実施の形態におけるコントローラ6の機能構成を示す機能ブロック図である。
【図5】第1の実施の形態における警報発生処理の処理手順の一例を示すフローチャートである。
【図6】自車両の予測進路の定義を説明するための説明図である。
【図7】自車両の予測走路の定義を説明するための説明図である。
【図8】進路変化範囲を説明するための説明図である。
【図9】第1の実施の形態における走路変化範囲を説明するための説明図である。
【図10】第1の実施の形態における要注意領域E*の設定方法を説明するための説明図である。
【図11】角度変化範囲dδと車速Vhとの対応を表す特性図である。
【図12】検知物体の領域内外判定方法を説明するための説明図である。
【図13】第1の実施の形態の動作説明に供する説明図である。
【図14】第1の実施の形態の動作説明に供する説明図である。
【図15】第1の実施の形態の動作説明に供する説明図である。
【図16】第1の実施の形態の動作説明に供する説明図である。
【図17】要注意領域のその他の設定方法を説明するための説明図である。
【図18】要注意領域のその他の設定方法を説明するための説明図である。
【図19】第2の実施の形態を適用した車両用障害物検出装置の一例を示す概略構成図である。
【図20】第2の実施の形態における制動力制御装置の出力特性を表す特性図である。
【図21】第2の実施の形態における制動力制御処理の処理手順の一例を示すフローチャートである。
【図22】第3の実施の形態を適用した車両用障害物検出装置の一例を示す概略構成図である。
【図23】第3の実施の形態における警報発生処理の処理手順の一例を示すフローチャートである。
【図24】第3の実施の形態による要注意領域の一例を示す説明図である。
【図25】第4の実施の形態における警報発生処理の処理手順の一例を示すフローチャートである。
【図26】第4の実施の形態の動作説明に供する説明図である。
【図27】車速Vhと走路幅Twとの対応を表す特性図である。
【図28】図27の特性に基づいて走路幅Twを設定した場合の、要注意領域E*の一例である。
【図29】操舵遅れ時間を考慮して要注意領域E*を設定する場合の領域設定方法を説明するための説明図である。
【図30】操舵遅れ時間を考慮した要注意領域E*の一例である。
【符号の説明】
1 レーダ装置
2 車速センサ
3 舵角センサ
4 ステアリングホイール
5 障害物検知装置
6 コントローラ
8 警報装置
9 制動力制御装置
10 路面状態センサ
11 自車進路計算部
12 路上領域算出部
13 領域判断処理部
14 警報判断処理部
Claims (17)
- 自車両前方の物体を検知し、この検知物体と自車両前方に想定した判断領域との位置関係を用いて、自車両が前記検知物体と接触する可能性を判断するようにした車両用障害物検知装置であって、
前記判断領域を、自車両の進路と自車両が以後取り得ると予測される運動状況とに応じて想定することを特徴とする車両用障害物検知装置。 - 自車両前方の物体を検知し、この検知物体と自車両との相対関係を検出する物体検知手段と、
自車両の現時点における進路を検出する進路検出手段と、
当該進路検出手段で検出した進路と自車両が以後取り得ると予測される運動状況とに応じて自車両前方に判断領域を想定する領域想定手段と、
当該領域想定手段で想定した判断領域と前記物体検知手段で検知した検知物体との位置関係を用いて、自車両が前記検知物体と接触する可能性を判断する判定手段と、を備えることを特徴とする車両用障害物検知装置。 - 前記運動状況は操舵状況であって、前記領域想定手段は、現時点以後取り得ると予測される操舵角の範囲に応じて前記判断領域を想定することを特徴とする請求項2記載の車両用障害物検知装置。
- 前記操舵角の範囲は、ドライバが常用的に使用する修正操舵の範囲に基づいて設定される右方向及び左方向への操舵角の変化量と、現時点における操舵角とに基づいて設定されることを特徴とする請求項3記載の車両用障害物検知装置。
- 車速を検出する車速検出手段を備え、
前記操舵角の変化量は、前記車速検出手段で検出される車速が大きくなるほど小さくなるように設定されることを特徴とする請求項4記載の車両用障害物検知装置。 - 前記操舵角の変化量は、当該変化量だけ操舵したときに発生する横加速度が、ドライバが常用的に発生させる横加速度の範囲内となり得る値に設定されることを特徴とする請求項4又は5記載の車両用障害物検知装置。
- 前記操舵角の変化量は、当該変化量だけ操舵したときに発生するヨーレートが、予め設定したヨーレートの範囲内となり得る値に設定されることを特徴とする請求項4乃至6の何れかに記載の車両用障害物検知装置。
- 路面摩擦係数を検出する路面摩擦係数検出手段を備え、
前記操舵角の変化量は、前記路面摩擦係数検出手段で検出される路面摩擦係数が低下するほど、より小さくなるように設定されることを特徴とする請求項4乃至7の何れかに記載の車両用障害物検知装置。 - 前記操舵角の変化量は、自車両が旋回中であるときには、切り戻し側に作用する前記操舵角の変化量が、切り増し側に作用する前記操舵角の変化量よりも大きくなるように設定されることを特徴とする請求項4乃至8の何れかに記載の車両用障害物検知装置。
- 前記領域想定手段は、現時点における操舵角から、右方向に前記操舵角の変化量だけ操舵したときに自車両が走行すると予測される走行領域と左方向に前記操舵角の変化量だけ操舵したときに自車両が走行すると予測される走行領域とが重畳する領域を、前記判断領域として想定することを特徴とする請求項4乃至9の何れかに記載の車両用障害物検知装置。
- 前記領域想定手段は、現時点から操舵角が実際に変化するまでの遅れ時間が経過した位置に相当する領域に前記判断領域を想定することを特徴とする請求項3乃至10の何れかに記載の車両用障害物検知装置。
- 路面摩擦係数を検出する路面摩擦係数検出手段を備え、
前記判断領域は、前記路面摩擦係数検出手段で検出される路面摩擦係数が低下するほど、自車両からより遠方の位置にまで想定されることを特徴とする請求項1乃至3の何れかに記載の車両用障害物検知装置。 - 前記判断領域は、その車幅方向の幅が、自車両近傍では広く、自車両から遠ざかるにつれて狭くなるように想定されることを特徴とする請求項1乃至12の何れかに記載の車両用障害物検知装置。
- 前記検知物体と自車両との相対速度を検出する相対速度検出手段を備え、
前記障害判定手段は、前記相対速度検出手段で検出される相対速度がしきい値を超えるときには、前記判断領域と前記検知物体との位置関係を用いて、前記検知物体との接触の可能性を判断し、
前記相対速度がしきい値以下であるときには、前記検知物体が自車両の進路上にあるか否かに基づいて、前記検知物体との接触の可能性を判断するようになっていることを特徴とする請求項2乃至13の何れかに記載の車両用障害物検知装置。 - 前記判断領域は、1又は複数想定されることを特徴とする請求項1乃至14の何れかに記載の車両用障害物検知装置。
- 前記判断領域は、異なる複数の操舵角の変化量に基づいて複数想定されることを特徴とする請求項4乃至14の何れかに記載の車両用障害物検知装置。
- 車速を検出する車速検出手段を備え、
前記判断領域は、前記車速検出手段で検出される車速が大きくなるほど、その車幅方向の幅が、広くなるように想定されることを特徴とする請求項1乃至16の何れかに記載の車両用障害物検知装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002190391A JP3918656B2 (ja) | 2002-06-28 | 2002-06-28 | 車両用障害物検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002190391A JP3918656B2 (ja) | 2002-06-28 | 2002-06-28 | 車両用障害物検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004038245A true JP2004038245A (ja) | 2004-02-05 |
| JP3918656B2 JP3918656B2 (ja) | 2007-05-23 |
Family
ID=31700321
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002190391A Expired - Fee Related JP3918656B2 (ja) | 2002-06-28 | 2002-06-28 | 車両用障害物検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3918656B2 (ja) |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004101481A (ja) * | 2002-09-12 | 2004-04-02 | Matsushita Electric Works Ltd | レーダ装置 |
| JP2005250756A (ja) * | 2004-03-03 | 2005-09-15 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2007091025A (ja) * | 2005-09-28 | 2007-04-12 | Fuji Heavy Ind Ltd | 車両の前方監視装置 |
| DE102006019848A1 (de) * | 2005-11-15 | 2007-05-24 | Mitsubishi Denki K.K. | Vorrichtung zum Reduzieren einer Auswirkung eines Fahrzeugzusammenstosses |
| JP2007153022A (ja) * | 2005-12-01 | 2007-06-21 | Mazda Motor Corp | 車両の障害物検知装置 |
| DE102008050554A1 (de) | 2007-10-29 | 2009-05-14 | Mitsubishi Fuso Truck and Bus Corp., Kawasaki | Erkennungseinrichtung für ein Überwachungsziel, welche mit einer Einrichtung zur Reduzierung von Kollisionsschaden verbunden ist |
| WO2009069646A1 (ja) * | 2007-11-30 | 2009-06-04 | Isuzu Motors Limited | 車両の障害物検知装置 |
| WO2009069588A1 (ja) * | 2007-11-30 | 2009-06-04 | Isuzu Motors Limited | 車両の障害物検知装置 |
| WO2009075187A1 (ja) * | 2007-12-10 | 2009-06-18 | Isuzu Motors Limited | 車両の障害物検知装置 |
| DE102008058840A1 (de) | 2007-12-25 | 2009-08-13 | Mitsubishi Fuso Truck and Bus Corp., Kawasaki | Vorrichtung zur Reduktion von Kollisionsschaden |
| JP2012011886A (ja) * | 2010-06-30 | 2012-01-19 | Toyota Central R&D Labs Inc | 動力車 |
| WO2013064705A1 (de) | 2012-02-14 | 2013-05-10 | Wabco Gmbh | Verfahren zur ermittlung einer notbremssituation eines fahrzeuges |
| JPWO2011125168A1 (ja) * | 2010-04-05 | 2013-07-08 | トヨタ自動車株式会社 | 車両の衝突判定装置 |
| WO2014045459A1 (ja) * | 2012-09-21 | 2014-03-27 | 株式会社小松製作所 | 作業車両用周辺監視システム及び作業車両 |
| JP2014096064A (ja) * | 2012-11-09 | 2014-05-22 | Toyota Motor Corp | 車両の運転支援装置及び運転支援方法 |
| JP2019011840A (ja) * | 2017-06-30 | 2019-01-24 | ジヤトコ株式会社 | 車両制御装置および車両制御方法 |
| JP2019011839A (ja) * | 2017-06-30 | 2019-01-24 | ジヤトコ株式会社 | 車両制御装置および車両制御方法 |
| JP2020148601A (ja) * | 2019-03-13 | 2020-09-17 | 本田技研工業株式会社 | 認識装置、車両制御装置、認識方法、およびプログラム |
| CN111731279A (zh) * | 2020-06-24 | 2020-10-02 | 重庆长安汽车股份有限公司 | 融合侧视摄像头实现车辆侧面保护的方法、车载设备及车辆 |
| JP2021062759A (ja) * | 2019-10-15 | 2021-04-22 | マツダ株式会社 | 運転支援装置 |
| CN113359147A (zh) * | 2020-03-06 | 2021-09-07 | 郑州宇通客车股份有限公司 | 一种车辆及目标物运动状态的判断方法和装置 |
| CN114758526A (zh) * | 2022-03-31 | 2022-07-15 | 浙江吉利控股集团有限公司 | 基于车联网大数据的避障方法、装置及存储介质 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5980364B1 (ja) * | 2015-03-23 | 2016-08-31 | 三菱電機株式会社 | 減速度指示装置 |
| CN113968216B (zh) * | 2020-07-25 | 2023-11-17 | 华为技术有限公司 | 一种车辆碰撞检测方法、装置及计算机可读存储介质 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0550934A (ja) * | 1991-08-22 | 1993-03-02 | Mazda Motor Corp | 車両の自動操舵装置 |
| JPH05203739A (ja) * | 1992-01-29 | 1993-08-10 | Mazda Motor Corp | 車両の障害物検出装置 |
| JPH0769233A (ja) * | 1993-07-06 | 1995-03-14 | Mazda Motor Corp | 車両の制御装置 |
| JPH07104062A (ja) * | 1993-09-30 | 1995-04-21 | Honda Motor Co Ltd | 衝突防止装置 |
| JPH1096775A (ja) * | 1996-09-24 | 1998-04-14 | Honda Access Corp | 車両の衝突警報システム |
| JPH1139598A (ja) * | 1997-07-17 | 1999-02-12 | Fuji Heavy Ind Ltd | 車両の衝突防止装置 |
| JP2000235699A (ja) * | 1999-02-15 | 2000-08-29 | Denso Corp | 車間距離制御装置 |
-
2002
- 2002-06-28 JP JP2002190391A patent/JP3918656B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0550934A (ja) * | 1991-08-22 | 1993-03-02 | Mazda Motor Corp | 車両の自動操舵装置 |
| JPH05203739A (ja) * | 1992-01-29 | 1993-08-10 | Mazda Motor Corp | 車両の障害物検出装置 |
| JPH0769233A (ja) * | 1993-07-06 | 1995-03-14 | Mazda Motor Corp | 車両の制御装置 |
| JPH07104062A (ja) * | 1993-09-30 | 1995-04-21 | Honda Motor Co Ltd | 衝突防止装置 |
| JPH1096775A (ja) * | 1996-09-24 | 1998-04-14 | Honda Access Corp | 車両の衝突警報システム |
| JPH1139598A (ja) * | 1997-07-17 | 1999-02-12 | Fuji Heavy Ind Ltd | 車両の衝突防止装置 |
| JP2000235699A (ja) * | 1999-02-15 | 2000-08-29 | Denso Corp | 車間距離制御装置 |
Cited By (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004101481A (ja) * | 2002-09-12 | 2004-04-02 | Matsushita Electric Works Ltd | レーダ装置 |
| JP2005250756A (ja) * | 2004-03-03 | 2005-09-15 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| US7904245B2 (en) | 2004-03-03 | 2011-03-08 | Nissan Motor Co., Ltd. | Method and vehicle reacting to the detection of an in-path obstacle |
| JP2007091025A (ja) * | 2005-09-28 | 2007-04-12 | Fuji Heavy Ind Ltd | 車両の前方監視装置 |
| DE102006019848A1 (de) * | 2005-11-15 | 2007-05-24 | Mitsubishi Denki K.K. | Vorrichtung zum Reduzieren einer Auswirkung eines Fahrzeugzusammenstosses |
| DE102006019848B4 (de) * | 2005-11-15 | 2010-04-29 | Mitsubishi Denki K.K. | Vorrichtung zum Reduzieren einer Auswirkung eines Fahrzeugzusammenstosses |
| JP2007153022A (ja) * | 2005-12-01 | 2007-06-21 | Mazda Motor Corp | 車両の障害物検知装置 |
| DE102008050554A1 (de) | 2007-10-29 | 2009-05-14 | Mitsubishi Fuso Truck and Bus Corp., Kawasaki | Erkennungseinrichtung für ein Überwachungsziel, welche mit einer Einrichtung zur Reduzierung von Kollisionsschaden verbunden ist |
| WO2009069646A1 (ja) * | 2007-11-30 | 2009-06-04 | Isuzu Motors Limited | 車両の障害物検知装置 |
| JP2009133781A (ja) * | 2007-11-30 | 2009-06-18 | Isuzu Motors Ltd | 車両の障害物検知装置 |
| JP2009133780A (ja) * | 2007-11-30 | 2009-06-18 | Isuzu Motors Ltd | 車両の障害物検知装置 |
| WO2009069588A1 (ja) * | 2007-11-30 | 2009-06-04 | Isuzu Motors Limited | 車両の障害物検知装置 |
| WO2009075187A1 (ja) * | 2007-12-10 | 2009-06-18 | Isuzu Motors Limited | 車両の障害物検知装置 |
| JP2009139320A (ja) * | 2007-12-10 | 2009-06-25 | Isuzu Motors Ltd | 車両の障害物検知装置 |
| DE102008058840A1 (de) | 2007-12-25 | 2009-08-13 | Mitsubishi Fuso Truck and Bus Corp., Kawasaki | Vorrichtung zur Reduktion von Kollisionsschaden |
| JPWO2011125168A1 (ja) * | 2010-04-05 | 2013-07-08 | トヨタ自動車株式会社 | 車両の衝突判定装置 |
| US8868325B2 (en) | 2010-04-05 | 2014-10-21 | Toyota Jidosha Kabushiki Kaisha | Collision judgment apparatus for vehicle |
| JP2012011886A (ja) * | 2010-06-30 | 2012-01-19 | Toyota Central R&D Labs Inc | 動力車 |
| WO2013064705A1 (de) | 2012-02-14 | 2013-05-10 | Wabco Gmbh | Verfahren zur ermittlung einer notbremssituation eines fahrzeuges |
| DE102012002695A1 (de) | 2012-02-14 | 2013-08-14 | Wabco Gmbh | Verfahren zur Ermittlung einer Notbremssituation eines Fahrzeuges |
| US9566959B2 (en) | 2012-02-14 | 2017-02-14 | Wabco Gmbh | Method for determining an emergency braking situation of a vehicle |
| EP2814704B1 (de) | 2012-02-14 | 2016-07-20 | WABCO GmbH | Verfahren zur ermittlung einer notbremssituation eines fahrzeuges |
| WO2014045459A1 (ja) * | 2012-09-21 | 2014-03-27 | 株式会社小松製作所 | 作業車両用周辺監視システム及び作業車両 |
| CN103827942A (zh) * | 2012-09-21 | 2014-05-28 | 株式会社小松制作所 | 作业车辆用周边监视系统及作业车辆 |
| CN103827942B (zh) * | 2012-09-21 | 2015-07-08 | 株式会社小松制作所 | 作业车辆用周边监视系统及作业车辆 |
| US9415722B2 (en) | 2012-09-21 | 2016-08-16 | Komatsu Ltd. | Working vehicle perimeter monitoring system and working vehicle |
| JP2014096064A (ja) * | 2012-11-09 | 2014-05-22 | Toyota Motor Corp | 車両の運転支援装置及び運転支援方法 |
| JP2019011839A (ja) * | 2017-06-30 | 2019-01-24 | ジヤトコ株式会社 | 車両制御装置および車両制御方法 |
| JP2019011840A (ja) * | 2017-06-30 | 2019-01-24 | ジヤトコ株式会社 | 車両制御装置および車両制御方法 |
| JP2020148601A (ja) * | 2019-03-13 | 2020-09-17 | 本田技研工業株式会社 | 認識装置、車両制御装置、認識方法、およびプログラム |
| CN111766601A (zh) * | 2019-03-13 | 2020-10-13 | 本田技研工业株式会社 | 识别装置、车辆控制装置、识别方法及存储介质 |
| CN111766601B (zh) * | 2019-03-13 | 2023-11-28 | 本田技研工业株式会社 | 识别装置、车辆控制装置、识别方法及存储介质 |
| JP7083768B2 (ja) | 2019-03-13 | 2022-06-13 | 本田技研工業株式会社 | 認識装置、車両制御装置、認識方法、およびプログラム |
| JP7312379B2 (ja) | 2019-10-15 | 2023-07-21 | マツダ株式会社 | 運転支援装置 |
| JP2021062759A (ja) * | 2019-10-15 | 2021-04-22 | マツダ株式会社 | 運転支援装置 |
| CN113359147A (zh) * | 2020-03-06 | 2021-09-07 | 郑州宇通客车股份有限公司 | 一种车辆及目标物运动状态的判断方法和装置 |
| CN113359147B (zh) * | 2020-03-06 | 2023-08-18 | 宇通客车股份有限公司 | 一种车辆及目标物运动状态的判断方法和装置 |
| CN111731279A (zh) * | 2020-06-24 | 2020-10-02 | 重庆长安汽车股份有限公司 | 融合侧视摄像头实现车辆侧面保护的方法、车载设备及车辆 |
| CN111731279B (zh) * | 2020-06-24 | 2022-06-07 | 重庆长安汽车股份有限公司 | 融合侧视摄像头实现车辆侧面保护的方法、车载设备及车辆 |
| CN114758526B (zh) * | 2022-03-31 | 2023-05-12 | 浙江吉利控股集团有限公司 | 基于车联网大数据的避障方法、装置及存储介质 |
| CN114758526A (zh) * | 2022-03-31 | 2022-07-15 | 浙江吉利控股集团有限公司 | 基于车联网大数据的避障方法、装置及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3918656B2 (ja) | 2007-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3918656B2 (ja) | 車両用障害物検出装置 | |
| JP6521486B2 (ja) | 車両制御装置 | |
| JP6573224B2 (ja) | 車両制御装置 | |
| CN107284454B (zh) | 防碰撞装置及防碰撞方法 | |
| JP4290455B2 (ja) | 車両用制動制御装置 | |
| JP5385009B2 (ja) | 車両制御装置および車両制御方法 | |
| JP4173292B2 (ja) | 車両用運転操作補助装置 | |
| JP6525413B1 (ja) | 車両制御装置 | |
| JP6380920B2 (ja) | 車両制御装置 | |
| US20170101092A1 (en) | Driving support apparatus | |
| JP6525401B2 (ja) | 車両制御装置 | |
| JP6521487B2 (ja) | 車両制御装置 | |
| JP6574407B2 (ja) | 車両制御装置、及び車両制御方法 | |
| WO2020066646A1 (ja) | 走行制御装置、車両及び走行制御方法 | |
| JP5417832B2 (ja) | 車両用運転支援装置 | |
| JP2019043195A (ja) | 車両制御装置 | |
| KR20200011672A (ko) | 후측방 경보 장치 및 그 후측방 경보 방법 | |
| JP6330712B2 (ja) | 障害物検出装置 | |
| JP3852397B2 (ja) | 車両用報知装置 | |
| JP3931760B2 (ja) | 車両用障害物検知装置 | |
| CN112141096A (zh) | 车辆及用于转向避让控制的方法 | |
| JP6525415B1 (ja) | 車両制御装置 | |
| JP2009252032A (ja) | 車両の接触回避支援装置 | |
| JP7409204B2 (ja) | 車両制御装置 | |
| KR20200029806A (ko) | 차량 및 그 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050328 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060901 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060912 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070123 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070205 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100223 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110223 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120223 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120223 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130223 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130223 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140223 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |