JP6525401B2 - 車両制御装置 - Google Patents
車両制御装置 Download PDFInfo
- Publication number
- JP6525401B2 JP6525401B2 JP2017165245A JP2017165245A JP6525401B2 JP 6525401 B2 JP6525401 B2 JP 6525401B2 JP 2017165245 A JP2017165245 A JP 2017165245A JP 2017165245 A JP2017165245 A JP 2017165245A JP 6525401 B2 JP6525401 B2 JP 6525401B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- speed
- obstacle
- travel route
- request signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
- B60W30/162—Speed limiting therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
- B60W30/165—Automatically following the path of a preceding lead vehicle, e.g. "electronic tow-bar"
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0011—Planning or execution of driving tasks involving control alternatives for a single driving scenario, e.g. planning several paths to avoid obstacles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/803—Relative lateral speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/103—Speed profile
Description
加速度センサ24は、車両1の加速度(前後方向の縦加速度、横方向の横加速度)を検出する。なお、加速度は、増速側(正)及び減速側(負)を含む。
ヨーレートセンサ25は、車両1のヨーレートを検出する。
操舵角センサ26は、車両1のステアリングホイールの回転角度(操舵角)を検出する。
アクセルセンサ27は、アクセルペダルの踏み込み量を検出する。
ブレーキセンサ28は、ブレーキペダルの踏み込み量を検出する。
ナビゲーションシステム30は、内部に地図情報を格納しており、ECU10へ地図情報を提供することができる。ECU10は、地図情報及び現在車両位置情報に基づいて、車両1の周囲(特に、進行方向前方)に存在する道路、交差点、交通信号、建造物等を特定する。地図情報は、ECU10内に格納されていてもよい。
先行車追従モードは、基本的に、車両1と先行車との間に車速に応じた所定の車間距離を維持しつつ、車両1を先行車に追従走行させるモードであり、車両制御システム100による自動的なステアリング制御,速度制御(エンジン制御,ブレーキ制御),障害物回避制御(速度制御及びステアリング制御)を伴う。
まず、車線両端部が検出される場合、車両1は、車線の中央付近を走行するようにステアリング制御され、設定車速入力部37を用いて運転者によって又は所定の処理に基づいてシステム100によって予め設定された設定車速(一定速度)を維持するように速度制御される。なお、設定車速が制限車速(速度標識やカーブの曲率に応じて規定される制限速度)よりも大きい場合は制限車速が優先され、車両1の車速は制限車速に制限される。カーブの曲率に応じて規定される制限速度は、所定の計算式により計算され、カーブの曲率が大きい(曲率半径が小さい)ほど低速度に設定される。
また、車線両端部が検出されない場合であって、且つ、先行車が存在する場合、車両1は、先行車の走行軌跡を追従するようにステアリング制御され、且つ、先行車の走行軌跡上の速度に追従するように速度制御される。
また、車線両端部が検出されない場合であって、且つ、先行車も存在しない場合、走行路上での走行位置を特定できない(区画線等検出不可、先行車追従不可)。この場合、現在の走行挙動(操舵角、ヨーレート、車速、加速度等)を運転者の意思により維持又は変更するように、運転者がステアリングホイール,アクセルペダル,ブレーキペダルを操作することにより、ステアリング制御及び速度制御を実行する。
また、自動速度制御モードは、運転者によって又はシステム100によって予め設定された所定の設定車速(一定速度)を維持するように速度制御するモードであり、車両制御システム100による自動的な速度制御(エンジン制御,ブレーキ制御),障害物回避制御(速度制御)を伴うが、ステアリング制御は行われない。この自動速度制御モードでは、車両1は、設定車速を維持するように走行するが、運転者によるアクセルペダルの踏み込みにより設定車速を超えて増速され得る。また、運転者がブレーキ操作を行った場合には、運転者の意思が優先され、設定車速から減速される。また、先行車に追いついた場合には、車速に応じた車間距離を維持しながら先行車に追従するように速度制御され、先行車が存在しなくなると、再び設定車速に復帰するように速度制御される。
また、速度制限モードは、車両1の車速が速度標識による制限速度又は運転者によって設定された設定速度を超えないように、速度制御するモードであり、車両制御システム100による自動的な速度制御(エンジン制御)を伴う。制限速度は、車載カメラ21により撮像された速度標識や路面上の速度表示の画像データをECU10が画像認識処理することにより特定してもよいし、外部からの無線通信により受信してもよい。速度制限モードでは、運転者が制限速度を超えるようにアクセルペダルを踏み込んだ場合であっても、車両1は制限速度までしか増速されない。
また、基本制御モードは、運転者操作部35により、運転支援モードが選択されていないときのモード(オフモード)であり、車両制御システム100による自動的なステアリング制御及び速度制御は行われない。ただし、自動衝突防止制御は実行されるように構成されており、この制御において、車両1が先行車等に衝突する可能性がある場合には自動的にブレーキ制御が実行され、衝突が回避される。また、自動衝突防止制御は、先行車追従モード,自動速度制御,速度制限モードにおいても同様に実行される。
図3に示すように、第1走行経路R1は、道路5の形状に即して車両1に走行路である車線5L内の走行を維持させるように所定期間分だけ設定される。詳しくは、第1走行経路R1は、直線区間5a,5cでは車両1が車線5Lの中央付近の走行を維持するように設定され、カーブ区間5bでは車両1が車線5Lの幅方向中央よりも内側又はイン側(カーブ区間の曲率半径Lの中心O側)を走行するように設定される。
また、図4に示すように、第2走行経路R2は、先行車3の走行軌跡を追従するように所定期間分だけ設定される。ECU10は、車載カメラ21による画像データ,ミリ波レーダ22による測定データ,車速センサ23による車両1の車速に基づいて、車両1の走行する車線5L上の先行車3の位置及び速度を継続的に計算して、これらを先行車軌跡情報として記憶し、この先行車軌跡情報に基づいて、先行車3の走行軌跡を第2走行経路R2(目標位置P2_k、目標速度V2_k)として設定する。
また、図5に示すように、第3走行経路R3は、運転者による車両1の現在の運転状態に基づいて所定期間分だけ設定される。即ち、第3走行経路R3は、車両1の現在の走行挙動から推定される位置及び速度に基づいて設定される。
ECU10は、車両1の操舵角,ヨーレート,横加速度に基づいて、所定期間分の第3走行経路R3の目標位置P3_kを計算する。ただし、ECU10は、車線両端部が検出される場合、計算された第3走行経路R3が車線端部に近接又は交差しないように、目標位置P3_kを補正する。
一方、先行車追従モードの選択時において、車線両端部が検出されず、先行車が検出された場合、第2走行経路が適用される。この場合、目標速度は、先行車の車速に応じて設定される。また、先行車追従モードの選択時において、車線両端部が検出されず、先行車も検出されない場合、第3走行経路が適用される。
図6では、車両1は走行路(車線)7上を走行しており、走行中又は停車中の車両3とすれ違って、車両3を追い抜こうとしている。
また、目標走行経路Rc3のように、目標走行経路Rの目標速度を変更せず、目標位置のみを変更する補正は、ステアリング制御を伴う運転支援モードに適用することができる(例えば、先行車追従モード)。
また、目標走行経路Rc2のように、目標走行経路Rの目標位置及び目標速度を共に変更する補正は、速度制御及びステアリング制御を伴う運転支援モードに適用することができる(例えば、先行車追従モード)。

走行経路計算処理(S13a)では、上述のように、第1走行経路,第2走行経路,又は第3走行経路が計算される。
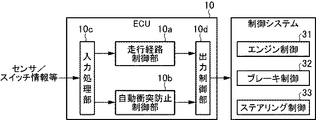
更に、ECU10(出力制御部10d)は、生成された第1の要求信号又は第2の要求信号に基づいて、エンジン制御システム31,ブレーキ制御システム32,ステアリング制御システム33へ要求信号を出力する(システム制御処理;S15)。
まず、ECU10は、モード選択スイッチ36から受け取っている運転支援モード選択信号に基づいて、運転者が先行車追従モードを選択しているか否かを判定する(S21)。
車線両端部位置は検出されていないが、先行車が検出されている場合(S24;Yes)、ECU10は、第2走行経路を目標走行経路として計算する(S25)。第2走行経路の計算処理では、ECU10は、センサ情報等から取得した先行車の先行車軌跡情報(位置及び速度)から、先行車と車両1との間に所定の車間距離を維持しつつ、車間距離を走行する時間分だけ遅れて先行車の挙動(位置及び速度)に追従するように、所定期間分の走行経路R2を計算する。
まず、ECU10は、情報取得処理(S11)において取得した各種の情報を用いて障害物情報(先行車や障害物の有無,位置,速度等)を取得する(S31)。
そして、ECU10は、障害物情報に基づいて、障害物が検出されていないと判定すると(S32;No)、処理を終了するが、障害物が検出されていると判定すると(S32;Yes)、障害物情報や車両1の走行挙動情報等から速度分布領域(図6参照)を設定する(S33)。
まず、ECU10は、情報取得処理(S11)において取得した各種の情報を用いて障害物情報(先行車や障害物の有無,位置,速度等)を取得する(S41)。
そして、ECU10は、車両1の現在の挙動状態(即ち、車速,加速度,ヨーレート,操舵角,横加速度等)から予測される車両1の所定期間分(例えば、3秒)の予測走行経路を計算し、この予測走行経路上に障害物が存在するか否かを判定する(S42)。
まず、ECU10から外部の制御システムへ出力される要求信号のうち、ブレーキ制御に関わるブレーキ要求信号について説明する。
第2実施形態では、自動緊急回避制御として、自動衝突防止制御の代わりに、自動進路逸脱防止制御が実行される。なお、第2実施形態では、上記実施形態との相違を主に説明する。
そして、ECU10は、車両1の現在の挙動状態(即ち、車速,加速度,ヨーレート,操舵角,横加速度等)から予測される車両1の所定期間分(例えば、3秒)の予測走行経路を計算し、この予測走行経路が走行車線から逸脱するか否か(予測走行経路が車線端部位置を横切るか否か)を判定する(S62)。
本実施形態は、車両制御装置(ECU)10であって、車両1の目標走行経路Rを繰り返し更新する走行経路制御部10aと、障害物との衝突回避のための自動衝突防止制御処理(S14;S41−S44)を実行する自動衝突防止制御部10bと、を備える。走行経路制御部10aは、障害物(例えば、車両3)が検出された場合に、この障害物を回避するように目標走行経路Rを補正する走行経路補正処理(S13b;S31−S35)を実行する。走行経路制御部10aは、走行経路補正処理において、目標走行経路Rを補正して障害物を回避する複数の補正走行経路を算出し、目標走行経路Rに対して複数の補正走行経路を、所定の評価関数Jによって評価し、その評価に応じて1つの補正走行経路を選択する、ように構成されている。走行経路制御部10aは、選択した補正走行経路を車両1が走行するように、車両1のブレーキ制御システム32に対する第1の要求信号を生成する。一方、自動衝突防止制御部10bは、走行経路制御部10aとは独立して、自動衝突防止制御処理を実行して、車両1のブレーキ制御システム32に対する第2の要求信号を生成する。ECU10は、走行経路制御部10a及び自動衝突防止制御部10bからそれぞれ第1の要求信号及び第2の要求信号を受け取る出力制御部10dを更に備える。出力制御部10dは、第1の要求信号又は第2の要求信号を車両1のブレーキ制御システム32へ出力するように構成されている。
3 車両
5 道路
5a,5c 直線区間
5b カーブ区間
5L,5R 車線
6L,6R 車線両端部
7 走行路
40 速度分布領域
a,b,c,d 等相対速度線
Vlim 許容上限値
100 車両制御システム
D 幅寸法
D0 安全距離
R 目標走行経路
R1 第1走行経路
R2 第2走行経路
R3 第3走行経路
Rc1,Rc2,Rc3 補正走行経路
X クリアランス
Claims (3)
- 車両制御装置であって、
車両の目標走行経路を繰り返し更新する走行経路制御部と、
障害物との衝突回避のための自動衝突防止制御処理を実行する自動衝突防止制御部と、を備え、
前記走行経路制御部は、障害物が検出された場合に、この障害物を回避するように前記目標走行経路を補正する走行経路補正処理を実行し、
前記走行経路制御部は、前記走行経路補正処理において、
少なくとも前記障害物から前記車両に向けて、前記障害物に対する前記車両の相対速度の許容上限値の分布を規定する速度分布領域を設定し、この速度分布領域における許容上限値は前記障害物から距離が離れるほど大きくなるように設定され、
前記速度分布領域内において前記障害物に対する前記車両の相対速度が前記許容上限値を超えないように、前記目標走行経路を補正して前記速度分布領域内を前記車両が走行するための複数の補正走行経路を算出し、
これらの目標走行経路に対して補正された複数の前記補正走行経路を、所定の評価関数によって評価し、その評価に応じて1つの補正走行経路を選択する、ように構成されており、
前記走行経路制御部は、選択した補正走行経路を前記車両が走行するように、前記車両のブレーキ制御システムに対する第1の要求信号を生成し、
前記自動衝突防止制御部は、前記走行経路制御部とは独立して、前記自動衝突防止制御処理を実行して、前記車両のブレーキ制御システムに対する第2の要求信号を生成し、
前記走行経路制御部及び前記自動衝突防止制御部からそれぞれ第1の要求信号及び第2の要求信号を受け取る出力制御部を更に備え、
前記出力制御部は、前記第1の要求信号又は前記第2の要求信号を前記車両のブレーキ制御システムへ出力するように構成されている、車両制御装置。 - 前記出力制御部は、前記第1の要求信号よりも、前記第2の要求信号を優先して出力するように構成されている、請求項1に記載の車両制御装置。
- 前記走行経路補正処理と前記自動衝突防止制御処理は、単一のCPUによって所定の繰り返し計算時間内に実行される、請求項1又は2に記載の車両制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017165245A JP6525401B2 (ja) | 2017-08-30 | 2017-08-30 | 車両制御装置 |
| US16/641,999 US20200353918A1 (en) | 2017-08-30 | 2018-08-23 | Vehicle control device |
| CN201880055105.3A CN111132882A (zh) | 2017-08-30 | 2018-08-23 | 车辆控制装置 |
| EP18850156.3A EP3663152A4 (en) | 2017-08-30 | 2018-08-23 | VEHICLE CONTROL DEVICE |
| PCT/JP2018/031102 WO2019044644A1 (ja) | 2017-08-30 | 2018-08-23 | 車両制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017165245A JP6525401B2 (ja) | 2017-08-30 | 2017-08-30 | 車両制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019043193A JP2019043193A (ja) | 2019-03-22 |
| JP6525401B2 true JP6525401B2 (ja) | 2019-06-05 |
Family
ID=65526395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017165245A Expired - Fee Related JP6525401B2 (ja) | 2017-08-30 | 2017-08-30 | 車両制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20200353918A1 (ja) |
| EP (1) | EP3663152A4 (ja) |
| JP (1) | JP6525401B2 (ja) |
| CN (1) | CN111132882A (ja) |
| WO (1) | WO2019044644A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7107125B2 (ja) * | 2018-09-19 | 2022-07-27 | トヨタ自動車株式会社 | 車両制御装置 |
| WO2020184423A1 (en) | 2019-03-08 | 2020-09-17 | Ricoh Company, Ltd. | Sound wave generator, broadcasting system, method for generating sound wave, and program |
| JP2021009653A (ja) * | 2019-07-03 | 2021-01-28 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7387224B2 (ja) * | 2019-07-31 | 2023-11-28 | ダイハツ工業株式会社 | 追従走行制御装置 |
| CN111402614A (zh) * | 2020-03-27 | 2020-07-10 | 北京经纬恒润科技有限公司 | 一种车辆行驶决策调整方法、装置及车载终端 |
| KR20220026656A (ko) * | 2020-08-25 | 2022-03-07 | 현대모비스 주식회사 | 차량의 주행 제어 시스템 및 방법 |
| US11738749B2 (en) * | 2020-11-09 | 2023-08-29 | GM Global Technology Operations LLC | Methods, systems, and apparatuses for scenario-based path and intervention adaptation for lane-keeping assist systems |
| JP7380541B2 (ja) * | 2020-12-22 | 2023-11-15 | トヨタ自動車株式会社 | 車両制御システム |
| JP7435513B2 (ja) | 2021-03-15 | 2024-02-21 | トヨタ自動車株式会社 | 車両制御装置及び車両制御方法 |
| US11891061B2 (en) | 2021-06-17 | 2024-02-06 | Ford Global Technologies, Llc | Target vehicle detection |
| US11938929B2 (en) | 2021-12-15 | 2024-03-26 | Ford Global Technologies, Llc | Obstacle avoidance for vehicle with trailer |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE50213504D1 (de) * | 2001-07-11 | 2009-06-10 | Bosch Gmbh Robert | Verfahren und vorrichtung zur prädiktion von beweg |
| JP2009061878A (ja) * | 2007-09-05 | 2009-03-26 | Toyota Motor Corp | 走行制御装置 |
| JP5206404B2 (ja) | 2008-12-26 | 2013-06-12 | トヨタ自動車株式会社 | 車両制御装置および車両制御方法 |
| JP5338398B2 (ja) * | 2009-03-12 | 2013-11-13 | トヨタ自動車株式会社 | 走行支援装置 |
| JP5472477B2 (ja) * | 2010-10-05 | 2014-04-16 | トヨタ自動車株式会社 | 衝突判定装置 |
| CN103597527B (zh) * | 2011-06-13 | 2016-03-16 | 丰田自动车株式会社 | 驾驶辅助装置和驾驶辅助方法 |
| JP6308032B2 (ja) * | 2014-06-04 | 2018-04-11 | 株式会社デンソー | 運転操作を生成するシステムおよび方法 |
| JP6323246B2 (ja) * | 2014-08-11 | 2018-05-16 | 日産自動車株式会社 | 車両の走行制御装置及び方法 |
| JP6296162B2 (ja) * | 2014-08-11 | 2018-03-20 | 日産自動車株式会社 | 車両の走行制御装置及び方法 |
| JP2016192010A (ja) * | 2015-03-31 | 2016-11-10 | 株式会社日立製作所 | 電子制御装置 |
| JP6532786B2 (ja) * | 2015-08-07 | 2019-06-19 | 株式会社日立製作所 | 車両走行制御装置及び速度制御方法 |
| JP6308186B2 (ja) * | 2015-08-28 | 2018-04-11 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| KR101714273B1 (ko) * | 2015-12-11 | 2017-03-08 | 현대자동차주식회사 | 자율 주행 시스템의 경로 제어 방법 및 그 장치 |
| DE102015016531A1 (de) * | 2015-12-18 | 2017-06-22 | Adam Opel Ag | Fahrerassistenzsystem und Verfahren zur Kollisionsvermeidung |
| JP6354746B2 (ja) * | 2015-12-24 | 2018-07-11 | マツダ株式会社 | 運転支援装置 |
-
2017
- 2017-08-30 JP JP2017165245A patent/JP6525401B2/ja not_active Expired - Fee Related
-
2018
- 2018-08-23 EP EP18850156.3A patent/EP3663152A4/en not_active Withdrawn
- 2018-08-23 WO PCT/JP2018/031102 patent/WO2019044644A1/ja unknown
- 2018-08-23 US US16/641,999 patent/US20200353918A1/en not_active Abandoned
- 2018-08-23 CN CN201880055105.3A patent/CN111132882A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN111132882A (zh) | 2020-05-08 |
| WO2019044644A1 (ja) | 2019-03-07 |
| US20200353918A1 (en) | 2020-11-12 |
| EP3663152A4 (en) | 2020-08-05 |
| JP2019043193A (ja) | 2019-03-22 |
| EP3663152A1 (en) | 2020-06-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6525402B2 (ja) | 車両制御装置 | |
| JP6525401B2 (ja) | 車両制御装置 | |
| JP6573224B2 (ja) | 車両制御装置 | |
| JP6573223B2 (ja) | 車両制御装置 | |
| JP6573222B2 (ja) | 車両制御装置 | |
| JP6525413B1 (ja) | 車両制御装置 | |
| JP6647681B2 (ja) | 車両制御装置 | |
| JP6572950B2 (ja) | 車両制御装置 | |
| JP6376523B2 (ja) | 車両制御装置 | |
| WO2019044641A1 (ja) | 車両制御装置 | |
| JP2018203108A (ja) | 車両制御装置 | |
| JP6572948B2 (ja) | 車両制御装置 | |
| JP6376522B2 (ja) | 車両制御装置 | |
| JP6525415B1 (ja) | 車両制御装置 | |
| JP6572949B2 (ja) | 車両制御装置 | |
| JP2021160660A (ja) | 車両制御装置 | |
| JP6376520B2 (ja) | 車両制御装置 | |
| JP6525414B1 (ja) | 車両制御装置 | |
| JP6525416B1 (ja) | 車両制御装置 | |
| JP6525417B1 (ja) | 車両制御装置 | |
| JP2018086947A (ja) | 車両制御装置 | |
| JP2021126979A (ja) | 車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20181212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190328 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190415 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6525401 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190428 |
|
| LAPS | Cancellation because of no payment of annual fees |