EP2682034B1 - Staubsauger mit einer Vorrichtung zur Einstellung einer Gebläseleistung und Verfahren zum Betrieb eines solchen Staubsaugers - Google Patents
Staubsauger mit einer Vorrichtung zur Einstellung einer Gebläseleistung und Verfahren zum Betrieb eines solchen Staubsaugers Download PDFInfo
- Publication number
- EP2682034B1 EP2682034B1 EP13401061.0A EP13401061A EP2682034B1 EP 2682034 B1 EP2682034 B1 EP 2682034B1 EP 13401061 A EP13401061 A EP 13401061A EP 2682034 B1 EP2682034 B1 EP 2682034B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- vacuum cleaner
- suction
- acceleration sensor
- fan
- power
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
- A47L9/2831—Motor parameters, e.g. motor load or speed
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2842—Suction motors or blowers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2857—User input or output elements for control, e.g. buttons, switches or displays
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2857—User input or output elements for control, e.g. buttons, switches or displays
- A47L9/2863—Control elements activated by pivoting movement of the upright vacuum cleaner handle
Definitions
- the invention relates to a vacuum cleaner with a device for adjusting a fan power of a suction fan included by the vacuum cleaner.
- the invention further relates to a method for operating such a vacuum cleaner.
- Vacuum cleaners with a device for adjusting a blower power of a suction blower enclosed by the vacuum cleaner are known per se. Conventional are as devices or devices for adjusting such a blower power controls in the form of potentiometers or buttons on a device housing of the vacuum cleaner or as part of a realized on a handle of the vacuum cleaner handle control. About these controls, an adjustment of the fan power of the vacuum cleaner included by the suction fan and thus ultimately an adjustment of the respective suction power of the vacuum cleaner.
- the adjustment of the blower power of the respective suction blower essentially means a regulation of an electrical power consumption of the suction blower, which can be realized for example in the form of a so-called phase control and a phase control based thereon.
- the JP 2011 206351 A discloses the use of an acceleration sensor on a handle of a vacuum cleaner to control the blower drive of the vacuum cleaner via the motion and acceleration information thus obtained.
- the JP 11 313 789 A describes the arrangement of a vibration or acceleration sensor on the handle of a vacuum cleaner. This is used to reduce the speed of the blower drive of the vacuum cleaner, in the event that the vibration or acceleration sensor experiences no vibration or acceleration caused by the operation of a vacuum cleaner.
- An object of the present invention is to provide a vacuum cleaner with a new operating concept, in particular a vacuum cleaner, in which a movement of the vacuum cleaner or an element of the vacuum cleaner can be interpreted as operator action and used to set a blower power of a respective suction fan.
- a vacuum cleaner with a device for adjusting a fan power of a vacuum cleaner included by the suction fan with the features of claim 1.
- a vacuum cleaner that acts as a device for adjusting a fan power, an acceleration sensor.
- an acceleration sensor provides a simple and mature possibility for detecting positions and movements in space, in this case positions or movements of the vacuum cleaner or of an element of the vacuum cleaner.
- the use of several such acceleration sensors comes into question.
- By evaluating one or more sensor signals which can be tapped on such an acceleration sensor it is thus possible to determine a movement or a position of the vacuum cleaner or of an element of the vacuum cleaner. On the basis of such a determined movement can then be a setting of a blower power of the respective suction fan, so for example an increase in the fan power or a reduction in the blower power can be effected.
- the position of the vacuum cleaner or an element of the vacuum cleaner is specifically understood an orientation of the vacuum cleaner or vacuum cleaner element, for example, an upright or inclined position of a bar vacuum cleaner or a suction pipe of a vacuum cleaner.
- any change in such a position can be detected based thereon.
- the acceleration sensor is attached to a grip element of the vacuum cleaner or is integrated in such a grip element.
- the above-mentioned detected position or movement of an element of the vacuum cleaner is insofar a position or movement of such a grip element.
- a vacuum cleaner in one embodiment as a so-called vacuum cleaner has a handle element at the end of a leading to a device housing with the suction fan Suction hose on and the handle member is used either itself as a suction nozzle or to guide a suction tube with a mounted at the end and acting as a suction nozzle floor nozzle.
- the respective position and movement of the grip element is thus meaningful in terms of a position and movement of the suction nozzle and thus meaningful in terms of a current use of the vacuum cleaner. Even with a vacuum cleaner in one embodiment as a rod vacuum cleaner, this has a handle element.
- the grip element is located on a tubular extension of the device housing, which has on its opposite side of the grip element a usually short suction tube and at the end of the respective suction nozzle.
- the acceleration sensor can also be attached to a suction nozzle or integrated in such a suction nozzle.
- the acceleration sensor is arranged in or on the movable connecting piece of the suction nozzle, this gives information about, among other things, the inclination of the suction pipe connected to the connecting piece and the respective position and movement of the gripping element connected to the suction pipe.
- the arrangement of the acceleration sensor in or on the connection piece of the suction nozzle thus provides information about the respective position and movement of the suction nozzle and the inclination of the suction pipe together with the handle element connected thereto. This information is thus meaningful in terms of a current use of the vacuum cleaner.
- Such a mentioned connecting piece which is movable relative to a main body of the suction nozzle, is usually found on suction nozzles, which act as bottom nozzles.
- the acceleration sensor can also be arranged in or on the suction nozzle, that is to say in or on the base body which rests on the base body during the treatment of a flat surface.
- the above-mentioned detected position or movement of an element of the vacuum cleaner is a position or movement of such a suction nozzle.
- the direct sensing of the position and movement of the suction nozzle gives a meaningful feedback regarding an instantaneous use of the vacuum cleaner.
- An adjustment of the blower power ie an adjustment of the blower power in the sense of reducing the blower power or in the sense of increasing the blower power, is always useful when the to be vacuumed flooring or the degree of contamination changes or special Sugsituationen occur, such as the suction of Curtains or similar.
- the components of the gravitational or gravitational acceleration are detected regularly or continuously with the acceleration sensor. From the acceleration-proportional stresses supplied by the acceleration sensor, the respective inclination angle of the acceleration sensor and thus, for example, the inclination angle of the grip element can be determined by means of trigonometric functions, namely inverse angle functions. In this case, for example, a rotation of the grip element about the axis of the suction tube can be detected in the same way as the inclination of the suction tube in the direction of the suction movement.
- the vacuum cleaner with an acceleration sensor as a device for setting or influencing a fan power is provided that with the acceleration sensor forward or backward movement of a suction nozzle of the vacuum cleaner can be seen. Then, the adjustment or adjustment of the blower power to the direction of movement of the suction nozzle and thus the movement during the suction process can be adjusted, for example, such that during a forward movement of the suction nozzle increased fan power and a backward movement of the suction nozzle, a reduced fan power is effective.
- the acceleration sensor is attached to a handle member of the vacuum cleaner or is integrated in such a handle member, the forward or backward movement of a suction nozzle can be seen that the handle member is firmly connected via a suction pipe to the suction nozzle.
- a vacuum cleaner with an acceleration sensor for adjusting or influencing a fan power is provided with the acceleration sensor, an inclination of an upstream (upstream with respect to the suction air flow generated in the operation before the suction fan) of the handle member suction pipe of the vacuum cleaner or an inclination of Vacuum cleaner is recognizable.
- Detecting an inclination of the suction pipe refers to vacuum cleaner in one embodiment as a vacuum cleaner.
- Detection of an inclination of the vacuum cleaner refers to vacuum cleaners in one embodiment as a stick vacuum cleaner, hand vacuum cleaner or table vacuum cleaner.
- As an inclination is understood to mean a deviation from a reference position and as a reference position or reference orientation is here and below to be assumed a horizontal floor surface.
- a suction pipe lying flat on the floor thus has the inclination zero and a vertically held suction pipe has an inclination of 90 °.
- the respective tendency to adjust or influence the fan power can be used. For example, by simply raising the grip member one or more times and thus changing the inclination of, for example, the suction pipe in a floor vacuum cleaner to increase the blower output, and correspondingly, changing the inclination by lowering the grip member to reduce the blower output.
- the power setting could also be carried out continuously as a function of a respective inclination of the suction pipe. Then the suction pipe acts like a big operating lever for the vacuum cleaner. An average inclination would lead to a medium fan performance. If a higher or lower blower power is required temporarily, the user can easily achieve this by changing the tilt of the draft tube.
- a rotational position and / or a rotation of the grip element can be detected with the acceleration sensor. Then such rotations on the handle element easily in signals for setting or influencing a Blower power of the respective suction fan to be implemented.
- a left turn of the handle member may result in a decrease in fan power and, correspondingly, a clockwise rotation, an increase in fan power. Even with a converted over a rotation of the handle element operating concept continuous or discrete adjustments of the fan power are possible.
- the fan power may be reduced continuously or in predetermined or predetermined discrete levels as the handle member is held by the user in this rotated position.
- the handle member is again moved to a center position and the blower power achieved by the previous rotation of the handle member is maintained.
- by a single or multiple rotational movements of the handle element to the left or right each carried a stepped adjustment of the fan power.
- Both concepts can also be implemented in combination, such that, with the rotation of the handle element to the left or right for more than a predetermined period of time, the blower power is reduced or increased continuously and that upon rotation of the handle element to the left or right and a subsequent rotation of the handle Grip element back into the middle position during the backward movement in the middle position, a stepped reduction or increase of the fan power takes place.
- a logic unit For processing the sensor signal or sensor signals which can be tapped off at the acceleration sensor and for evaluating or recognizing the respective operator actions or operating situations, a logic unit is suitable for processing one or more acceleration measured values supplied by the acceleration sensor as sensor signal or sensor signals.
- the logic unit includes predetermined logic operations for processing such an acceleration measurement or acceleration measurements.
- the logic unit may also include predetermined logical operations for comparing and processing such an acceleration measurement or acceleration measurement values from a plurality of acceleration sensors. On this basis, the logic unit is effective for adjusting or influencing the fan power of the suction fan depending on the result of the logic operations.
- ASIC user-specific integrated circuit
- Such a logic unit offers versatile and flexible possibilities for implementing one or more logic operations for processing at least one acceleration measurement value supplied by an acceleration sensor.
- a vacuum cleaner with such a logic unit for adjusting the blower power is provided that different user scenarios of the vacuum cleaner are created in the form of a plurality of logical links and depending on the result of the logic operations and depending on the respective use scenario respectively identified the blower power adjustable or can be influenced. Then, for example, the duration during which a particular accelerometer reading is pending may be used to detect a usage scenario to allow for a momentarily changed intake manifold tilt from a prolonged change in intake manifold tilt and a user's desire to change the blower output distinguished. The same applies to a situation in which the respective blower power can be influenced by a rotation of the grip element.
- the invention thus also relates to a method for operating a vacuum cleaner as described here and below, wherein with the acceleration sensor in the form of acceleration measurements at least one component of the force acting on the acceleration sensor gravitational acceleration is detected and wherein depending on the or each detected acceleration reading a fan power of is changed by the vacuum cleaner included suction fan.
- a considered component of the vacuum cleaner for which at least one acceleration measurement is detected, in particular a handle element is considered, because the handle element is the natural component to operate a vacuum cleaner during the suction process, so that optimally based on a position or orientation of the handle member respective suction situation is recognizable.
- suction nozzle Another component of the vacuum cleaner, for which at least one acceleration reading can be detected, is the suction nozzle, because the suction nozzle, acting as a floor nozzle, is the natural component, which is moved back and forth on a flat surface during the suction process, so that on the basis of the acceleration from forward movement and opposite backward movement the respective suction situation is recognizable.
- the fan power is changed continuously in accordance with an acceleration measured value detected by the acceleration sensor and / or that the fan power is discretely changed by a predetermined or specifiable amount if an acceleration measured value acquired with the acceleration sensor exceeds a predetermined or predefinable threshold value. or below.
- An acceleration measured value detected with the acceleration sensor is used as a basis for a forward or backward movement of a Suction nozzle of the vacuum cleaner is evaluated and in a forward movement, the fan power is increased and the fan power is reduced in a backward movement;
- an acceleration value detected by the acceleration sensor is evaluated as an indication of an inclination of a suction pipe of the vacuum cleaner, and when the intake pipe is in a steep position the fan power is reduced and the fan power is increased when the suction pipe is in a flat position;
- an acceleration measurement value detected by the acceleration sensor is evaluated as an indication of a rotation of a grip element of the vacuum cleaner, and when the grip element is rotated in a first direction increases the blower output and reduces the blower output when the grip element is rotated in an opposite, second direction.
- FIG. 1 schematically shows a simplified vacuum cleaner 10 in one embodiment as a vacuum cleaner.
- a simplified vacuum cleaner 10 in one embodiment as a vacuum cleaner.
- This comprises, in a manner known per se, a device housing 12 with a suction fan located therein and not shown, a suction hose 14 connected to the device housing 12, a grip element 16 located at the end of the suction hose 14 and a suction pipe 18 mounted upstream of the grip element 16, at the end of which a suction nozzle 20 is in the form of a floor nozzle.
- the grip element 16 is considered as a location for mounting an acceleration sensor 22 into consideration.
- the grip element and the suction nozzle 20 comes as a place for mounting an acceleration sensor 28 in question.
- the acceleration sensor 22, 28 acts as a device for adjusting or influencing a fan power of the vacuum cleaner 10, the further description using the example of a vacuum cleaner is not to be construed as limiting, because the approach presented here and the feasible operating concept come just as for vacuum cleaners in others Embodiments, in particular stick vacuum cleaner, hand vacuum cleaner, vacuum cleaner and so on, into consideration.
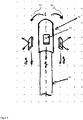
- FIG. 2 shows a detail of the suction pipe 18 and in comparison to the illustration in FIG. 1 a simplified representation of the handle member 16.
- the acceleration sensor 22 is shown in the region of the handle member 16.
- the illustrated location and magnitude of the acceleration sensor 22 is selected only for ease of illustration, and the acceleration sensor 22 is either attached to the handle member 16 or integrated with the handle member 16.
- measured values for the gravitational acceleration acting on the acceleration sensor 22 in three independent spatial directions can be determined with the acceleration sensor 22.
- the gravitational acceleration is shown with the formula symbol g commonly used for this purpose and acts vertically downwards.
- the respective inclination of the .mu Suction tube 18 can be determined.
- the inclination of the suction pipe 18 is in FIG. 2 symbolically denoted by the symbol ⁇ . This is also used in the following for the respective description of the inclination of the suction pipe 18.
- a rather steep orientation of the suction tube 18 means a strong angle of inclination and, correspondingly, a rather flat orientation of the suction tube 18 means a small angle of inclination.
- a direction of a forward movement 46 is drawn during the suction process and this direction of movement is also referred to below.
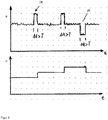
- FIG. 3 shows two graphs, namely in the upper part of a curve of an ascertained by the acceleration sensor 22 Acceleration measured values of the inclination angle ⁇ of the suction pipe 18 and in the lower part a graph of a designated by the symbol P power of a suction fan of the respective vacuum cleaner 10.
- the intake pipe 18 is changed in its inclination ⁇ for the first time, such that the intake pipe 18 is steeper, at least in the short term (greater inclination ⁇ ). This is done later again and at the end of the presentation in FIG.
- the reference numeral 26 designates a situation in which the suction pipe 18 is kept shallower (smaller inclination ⁇ ). Such waveforms can be used to adjust or influence a blower power P of the respective suction fan, as in the lower part of the illustration in FIG FIG. 3 is shown. Thereafter, each time the inclination ⁇ of the suction pipe 18 is increased for a predetermined duration (here expressed as ⁇ t> T), the blower power P of the suction fan is increased, as can be seen from the two-stage rising graph of the blower power P. If finally according to the in FIG.
- FIG. 4 illustrates that with the acceleration sensor 22 not only a changed inclination ⁇ of the suction pipe 18, but also a rotation 50, 52 of the grip member 16 can be detected.
- FIG. 4 With a rotatability of the gripping element 16 or a rotatable portion of the gripping element 16, a setting or influencing of a blower power P of the suction blower of the respective vacuum cleaner 10 is also possible by a rotary movement.
- FIG. 5 explained (in a similar representation as FIG. 3 ) the effect of a realizable with a rotatable handle member 16 operating concept.
- FIG. 5 shows FIG. 5 in the upper area, a graph of a rotational angle, determined on the basis of the acceleration measured values obtained by the acceleration sensor 22, of the grip element 16, which is designated here symbolically by the symbol ⁇ .
- a progression of the blower power of the suction blower designated by the formula P is shown over the same time base.
- the grip element 16 is for the first time noticeably rotated, for example, to the right, and this rotation position lasts at least for a predetermined duration (.DELTA.t> T), so that the adjustment of the blower power P can take place with the passage of the predetermined duration
- a reduction in the blower power P which can be seen from the descending stage of the graph for the blower power P.
- Such a reduction of the blower power P takes place at a later time by a further right turn 52 of the grip element 16 again and at the conclusion of the illustration in FIG FIG. 5 is denoted by the reference numeral 26, a situation in which the grip member 16 undergoes a left turn 50.
- this rotational position stops for more than a predetermined period of time T, so that at the end of the period influencing the fan power P takes place.
- FIG. 6 shows the representation in FIG. 6 in that likewise a continuous adjustment of the blower power P, for example as a function of the inclination ⁇ of the suction pipe 18 (or of the rotation 50, 52 of the gripping element 16), can take place.
- a situation is shown in which the suction tube 18 is initially in a medium inclination 35. Thereafter, the suction tube 18 is kept flatter (the inclination angle ⁇ thus decreases).
- FIG. 6 shows in the lower part of the correlated with the reduced inclination ⁇ of the suction pipe 18 increased blower power P.
- the suction pipe 18 is steeper steered at the end of the period considered and the blower power P is withdrawn, because at a steeper position and a correspondingly increased inclination of the suction pipe 18 results in a less favorable lever with respect to the movement of the suction nozzle 20, so that movement of the Suction nozzle 20 with a comparable use of force is only possible if the blower power P is reduced. Accordingly, a steeper orientation of the suction pipe 18 is interpreted as a control action for the reduction of the blower power P.
- FIG. 7 shows an adjustment of the blower power P of the suction fan according to a forward movement 46 (FIG. FIG. 2 . FIG. 8 ) and backward movement 48 ( FIG. 2 . FIG. 8 ) of the suction nozzle 20 during the suction process.
- This is with two graphs as with the previous ones Figures 3 . 5 and 6 in the upper part of the illustration, an inclination ⁇ of the suction pipe 18 and in the lower part of the illustration, a blower power P of the suction fan shown.
- the graphs are divided into three sections, namely first, second and third sections 30, 32, 34.
- the inclination ⁇ of the suction pipe 18 begins above a mean inclination 35 and decreases continuously to a value below an average inclination 35 from. This is characteristic of a forward movement 46 of a suction nozzle 20 by means of a suction tube 18.
- the inclination ⁇ of the suction tube 18 increases from a value below the mean inclination 35 to a value above the mean inclination 35, as for a backward movement 48 ( FIG. 2 . FIG. 8 ) is characteristic, and in the third section 34, the value of the inclination ⁇ of the suction pipe 18 decreases again similar to the first section 30.
- the three sections 30, 32, 34 thus represent the change in the inclination ⁇ of the suction pipe 18 in a forward movement 46 (first Section 30), a subsequent backward movement 48 (second section 32) and a
- the inclination ⁇ suction pipe 18 can be determined by an arrangement of the acceleration sensor 22 in or on the handle member 16 as well as by an arrangement of the acceleration sensor 28 in or on the connecting piece 21 of the suction nozzle 20.
- the arrangement of the acceleration sensor 28 in the suction nozzle 20 is not shown in detail. However, the same applies here as for the acceleration sensor 22. Also for the acceleration sensor 28, measured values for the gravitational acceleration acting on the acceleration sensor 28 can be determined in three independent spatial directions. The inclination of the suction nozzle or the inclination of the connecting piece 21 can be determined via the gravitational acceleration acting downwards. Of particular importance for the arrangement of the acceleration sensor 28 in the suction nozzle 20, however, is the sensing of the accelerations of the suction nozzle 20 in forward movement 46 (FIG. FIG. 2 . FIG. 8 ) and opposite backward motion 48 (FIG. FIG. 2 . FIG. 8 ) during the suction process.
- Forward motion 46 and reverse motion 48 (FIG. FIG. 2 . FIG. 8 ) of the suction nozzle during the suction process can also be detected directly by arranging the acceleration sensor 28 in the suction nozzle 20. It is also conceivable, however, to combine a plurality of acceleration sensors into suction nozzle and grip element in order to make the respective suction situation more clearly recognizable.
- FIG. 7 illustrates, in its entirety, that with the forward motion 46 normally included in a suction process, 46 (FIG. FIG. 2 . FIG. 8 ) and backward movements 48 ( FIG. 2 . FIG. 8 ) of the suction nozzle 20 may be associated with adjustments or adjustments of the blower power P of the suction fan of the respective vacuum cleaner 10.
- the lower part of the illustration in FIG. 7 shows two variants.
- the respective resulting blower power P can be adjusted in accordance with the inclination ⁇ of the suction pipe 18 during a forward movement 46 (FIG. FIG. 2 . FIG. 8 ) or backward movement 48 (FIG. FIG. 2 .
- FIG. 7 illustrates, in its entirety, that with the forward motion 46 normally included in a suction process, 46 (FIG. FIG. 2 . FIG. 8 ) and backward movements 48 ( FIG. 2 . FIG. 8 ) of the suction nozzle 20 may be associated with adjustments or adjustments of the blower power P of the suction fan of the respective vacuum
- FIG. 8 shows that during a suction process and the forward movement 46 and backward movements 48 of the suction nozzle 20 normally associated therewith, adjustments or adjustments of the blower output P of the suction blower of the respective vacuum cleaner 10 may occur.
- the lower part of the illustration in FIG. 8 shows two variants.
- the respective resulting blower power P corresponding to the acceleration a x of the suction nozzle 20 can be set to fixed blower power values at a forward movement 46 and backward movement 48 of the suction nozzle 20, as shown in the fixed power graph 36.
- the switching between an upper fixed power value and a lower fixed power value takes place, for example, at sufficiently significant inflection points of the course of the acceleration a x of the suction nozzle 20.
- an adjustment or influencing of the blower output P of the respective suction blower can also be carried out for other usage scenarios.
- the suction tube 18 is lowered almost horizontally and at the same time the handle element 16 is rotated 90 degrees, so that the floor nozzle acting as a suction nozzle 20 can lie flat due to their hinged connection to the suction tube, it can be assumed that under a low piece of furniture, for example, a sofa, to be sucked.
- the previous blower power P of the normal operation could be maintained.
- the suction tube 18 are held without rotation 50, 52 of the handle member 16 in the horizontal or even steep upward, so it is assumed that curtains or ceilings are sucked. In this case, the blower power P could be automatically reduced significantly.
- an interruption or termination of a suction process can be detected, because at such an interruption or termination of the suction, the suction pipe 18 is often brought for a long time in a vertical position, ie a so-called parking position, so that upon detection of such a tendency ⁇ of the suction pipe 18, the suction fan could be completely switched off.
- a separate switch to detect the parking position as previously required for deactivation of the suction fan when the parking position, could then be omitted.
- a dropping of the suction pipe 18 next to the vacuum cleaner 10 can be detected and in the absence of further movements of the suction pipe 18 or the handle member 16, the suction fan can be switched off. The reconnection of the suction fan can then be done automatically as soon as movements of the grip element 16 or a suction angle for the usual inclination angle of the suction pipe 18 are detected.
- FIG. 9 shows a schematically simplified block diagram for clarifying the processes when setting or influencing a blower power P of a suction blower 40 enclosed by the respective vacuum cleaner 10.
- the acceleration sensor 22 delivers one or more acceleration measurement values which are processed by a logic unit.
- the logic unit 42 handles the processing of the or each acceleration measurement value provided by the acceleration sensor 22 in accordance with predetermined logical operations.
- the setting of the fan power P of the suction fan 40 then takes place as a function of the result of these logic operations.
- FIG. 9 In this respect, schematically shows a plurality of logic networks 44 for implementing such logic operations, to which each or each acceleration measurement value supplied by the acceleration sensor 22 is supplied.
- Each logic network 44 has logic operations with which a particular usage situation of the vacuum cleaner 10 or a specific operating action on the vacuum cleaner 10 can be seen. For example, in a continuous adjustment of the blower power P of the suction fan 40 in response to an inclination ⁇ of the suction pipe 18, a first logic network 44 due to the respectively determined inclination angle ⁇ of the suction pipe 18 determine a suitable blower power P. Another logic network 44 could recognize sudden changes in the inclination ⁇ of the intake manifold 18 and monitor whether a sudden change in inclination ⁇ of the intake manifold 18 longer than a predetermined period (see. FIG. 3 ) persists.
- the logic unit 42 can respond to either use scenario according to either a continuous or a spike adjustment of the blower power P.
- the logic unit 42 further, possibly also individually activatable or deactivatable logic networks 44 include the other with reference to the other Figures 4-8
- a linking or mutual interlocking of the individual signals respectively generated by the logic networks 44 can take place in order to prevent contradictory activation of the suction blower 40 with a respective setpoint value for the blower output P given a simultaneous activity of a plurality of logic networks 44.
- Vacuum cleaners 10 are provided with a device for setting a fan power of a suction fan 40 encompassed by the vacuum cleaner 10, an acceleration sensor 22 functioning as a device for setting a fan power a method for operating such a vacuum cleaner, wherein detected by the acceleration sensor 22, at least one acceleration reading and depending on the fan power of the suction fan 40 is changed.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Electric Vacuum Cleaner (AREA)
Description
- Die Erfindung betrifft einen Staubsauger mit einer Vorrichtung zur Einstellung einer Gebläseleistung eines von dem Staubsauger umfassten Sauggebläses. Die Erfindung betrifft im Weiteren auch ein Verfahren zum Betrieb eines solchen Staubsaugers.
Staubsauger mit einer Vorrichtung zur Einstellung einer Gebläseleistung eines von dem Staubsauger umfassten Sauggebläses sind an sich bekannt. Üblich sind dabei als Vorrichtung oder Vorrichtungen zur Einstellung einer solchen Gebläseleistung Bedienelemente in Form von Potentiometern oder Tasten an einem Gerätegehäuse des Staubsaugers oder als Bestandteil einer an einem Handgriff des Staubsaugers realisierten Handgriffsteuerung. Über diese Bedienelemente erfolgt eine Einstellung der Gebläseleistung des von dem Staubsauger umfassten Sauggebläses und damit letztlich auch eine Einstellung der jeweiligen Saugleistung des Staubsaugers. Die Einstellung der Gebläseleistung des jeweiligen Sauggebläses bedeutet dabei im Wesentlichen eine Regulierung einer elektrischen Leistungsaufnahme des Sauggebläses, die zum Beispiel in Form eines sogenannten Phasenanschnitts und einer darauf basierenden Phasenanschnittsteuerung realisiert sein kann.
DieJP 2011 206351 A JP 11 313 789 A - Ein weiteres Beispiel eines Beschleunigungssensor an einem Handgriff eines Staubsaugers zur Einstellung des Gebläses ist in der
WO2012/077621 bekannt. - Bedienkonzepte unter Verwendung solcher oder ähnlicher Bedienelemente, die eine manuelle Betätigung durch den jeweiligen Bediener in Form von Drücken, Schieben, Drehen und so weiter erfordern, sind allgemein geläufig und sehr ausgereift.
Eine Aufgabe der vorliegenden Erfindung besteht darin, einen Staubsauger mit einem neuen Bedienkonzept anzugeben, insbesondere einen Staubsauger, bei dem eine Bewegung des Staubsaugers oder eines Elements des Staubsaugers als Bedienhandlung interpretierbar und zur Einstellung einer Gebläseleistung eines jeweiligen Sauggebläses verwendbar ist. - Diese Aufgabe wird erfindungsgemäß mit einem Staubsauger mit einer Vorrichtung zur Einstellung einer Gebläseleistung eines von dem Staubsauger umfassten Sauggebläses mit den Merkmalen des Patentanspruchs 1 gelöst. Dazu ist bei einem derartigen Staubsauger vorgesehen, dass als Vorrichtung zur Einstellung einer Gebläseleistung ein Beschleunigungssensor fungiert.
- Der Vorteil der Erfindung besteht darin, dass ein Beschleunigungssensor eine einfache und ausgereifte Möglichkeit bietet, um Positionen und Bewegungen im Raum zu detektieren, hier also Positionen oder Bewegungen des Staubsaugers oder eines Elements des Staubsaugers. Neben der Verwendung eines Beschleunigungssensors kommt auch der Einsatz mehrere solcher Beschleunigungssensoren in Frage. Durch Auswertung eines oder mehrerer an einem solchen Beschleunigungssensor abgreifbarer Sensorsignale lässt sich also eine Bewegung oder eine Position des Staubsaugers oder eines Elements des Staubsaugers ermitteln. Anhand einer solchen ermittelten Bewegung kann dann eine Einstellung einer Gebläseleistung des jeweiligen Sauggebläses, also zum Beispiel eine Erhöhung der Gebläseleistung oder eine Reduktion der Gebläseleistung, bewirkt werden. Als Position des Staubsaugers oder eines Elements des Staubsaugers wird dabei speziell eine Orientierung des Staubsaugers oder Staubsaugerelements aufgefasst, zum Beispiel eine aufrechte oder geneigte Position eines Stabstaubsaugers oder eines Saugrohrs eines Bodenstaubsaugers. Als Bewegung des Staubsaugers oder eines Elements des Staubsaugers kann darauf basierend jede Änderung einer solchen Position erfasst werden.
- Vorteilhafte Ausgestaltungen und Weiterbildungen der Erfindung ergeben sich aus den nachfolgenden Unteransprüchen. Dabei verwendete Rückbeziehungen weisen auf die weitere Ausbildung des Gegenstandes des Hauptanspruches durch die Merkmale des jeweiligen Unteranspruches hin. Sie sind nicht als ein Verzicht auf die Erzielung eines selbständigen, gegenständlichen Schutzes für die Merkmalskombinationen der rückbezogenen Unteransprüche zu verstehen. Des Weiteren ist im Hinblick auf eine Auslegung der Ansprüche bei einer näheren Konkretisierung eines Merkmals in einem nachgeordneten Anspruch davon auszugehen, dass eine derartige Beschränkung in den jeweils vorangehenden Ansprüchen nicht vorhanden ist.
- Bei einer Ausführungsform des Staubsaugers ist vorgesehen, dass der Beschleunigungssensor an einem Griffelement des Staubsaugers angebracht ist oder in ein solches Griffelement integriert ist. Die oben erwähnte, erfasste Position oder Bewegung eines Elements des Staubsaugers ist insoweit eine Position oder Bewegung eines solchen Griffelements.
- Ein Staubsauger in einer Ausführungsform als sogenannter Bodenstaubsauger weist ein Griffelement am Ende eines zu einem Gerätegehäuse mit dem Sauggebläse führenden Saugschlauchs auf und das Griffelement wird entweder selbst als Saugdüse oder zur Führung eines Saugrohrs mit einer an dessen Ende angebrachten und als Saugdüse fungierenden Bodendüse verwendet. Die jeweilige Position und Bewegung des Griffelements ist damit also aussagekräftig im Hinblick auf eine Position und Bewegung der Saugdüse und damit aussagekräftig im Hinblick auf eine momentane Verwendung des Staubsaugers. Auch bei einem Staubsauger in einer Ausführungsform als Stabstaubsauger weist dieser ein Griffelement auf. Das Griffelement befindet sich dabei an einer rohrartigen Verlängerung des Gerätegehäuses, das an seiner dem Griffelement gegenüberliegenden Seite ein üblicherweise kurzes Saugrohr und an dessen Ende die jeweilige Saugdüse aufweist. Auch bei einem Stabstaubsauger sind die Position und die Bewegung des Griffelements in der oben skizzierten Weise aussagekräftig für die momentane Verwendung des Staubsaugers. Schließlich kommt als Griffelement eines Staubsaugers wie hier und nachfolgend beschrieben auch ein üblicherweise als Handgriff ausgebildeter Teil eines Handstaubsaugers oder Tischstaubsaugers in Betracht. Auch für eine solche Ausführungsform eines Staubsaugers gilt das oben Gesagte hinsichtlich der Aussagefähigkeit der Position und der Bewegung des Griffelements im Hinblick auf die jeweils momentane Verwendung des Staubsaugers.
- Neben der bereits beschriebenen Ausführungsform kann der Beschleunigungssensor auch an einer Saugdüse angebracht sein oder in einer solchen Saugdüse integriert sein. Hierbei sind unterschiedliche Ausführungsformen möglich die verschiedene Vorteile mit sich bringen. Für den Fall, dass der Beschleunigungssensor im oder am beweglichen Anschlussstutzen der Saugdüse angeordnet ist, gibt dieser unter anderem Auskunft über Neigung des an den Anschlussstutzen angeschlossenen Saugrohr und die jeweilige Position und Bewegung des mit dem Saugrohr verbundenen Griffelements. Die Anordnung des Beschleunigungssensors in oder an dem Anschlussstutzen der Saugdüse ermöglicht also eine Auskunft zu der jeweiligen Position und Bewegung der Saugdüse und die Neigung des Saugrohrs samt damit verbundenem Griffelement. Diese Auskunft ist damit also aussagekräftig im Hinblick auf eine momentane Verwendung des Staubsaugers. Ein solcher erwähnter Anschlussstutzen, der beweglich gegenüber einem Grundkörper der Saugdüse ist, findet sich üblicherweise an Saugdüsen, die als Bodendüsen fungieren. Neben der Anordnung des Beschleunigungssensors in dem Anschlussstutzen kann der Beschleunigungssensor auch in oder an der Saugdüse angeordnet sein, das heißt in oder an dem Grundkörper, welcher bei der Behandlung eines flachen Untergrunds auf diesem aufliegt. In diesem Fall ist die oben erwähnte, erfasste Position oder Bewegung eines Elements des Staubsaugers insoweit eine Position oder Bewegung einer solchen Saugdüse. Die direkte Sensierung der Position und Bewegung der Saugdüse gibt eine aussagekräftige Rückmeldung um Hinblick auf eine momentane Verwendung des Staubsaugers. Auch die Anordnung mehrerer Beschleunigungssensoren in verschiedenen Komponenten des Staubsaugers, wie zum Beispiel im Griffelement oder Saugdüse, ist möglich. So könnte ein Sensor im Griffelement auch durch einen Sensor in der Saugdüse ergänzt werden. Durch Vergleiche der Messwerte mehrerer Sensoren, wären bei dieser Ausführungsform, noch genauere Aussagen zur Position und Bewegung der Saugdüse und dem Griffelement und damit zur momentanen Verwendung des Staubsaugers möglich.
- Eine Verstellung der Gebläseleistung, also eine Einstellung der Gebläseleistung im Sinne einer Verringerung der Gebläseleistung oder im Sinne einer Erhöhung der Gebläseleistung, ist immer dann sinnvoll, wenn sich der zu saugende Bodenbelag oder der Verschmutzungsgrad ändert oder spezielle Saugsituationen auftreten, wie zum Beispiel das Absaugen von Vorhängen oder Ähnlichem. Um das manuelle Umschalten der Gebläseleistung zwischen unterschiedlichen Leistungsstufen oder eine kontinuierliche Anpassung der Gebläseleistung zu vereinfachen, werden mit dem Beschleunigungssensor regelmäßig oder kontinuierlich die Komponenten der Erd- oder Fallbeschleunigung erfasst. Aus den vom Beschleunigungssensor gelieferten beschleunigungsproportionalen Spannungen lässt sich mithilfe trigonometrischer Funktionen, nämlich inverser Winkelfunktionen, der jeweilige Neigungswinkel des Beschleunigungssensors und damit zum Beispiel der Neigungswinkel des Griffelements bestimmen. Dabei kann beispielsweise eine Drehung des Griffelements um die Achse des Saugrohrs genauso erkannt werden wie die Neigung des Saugrohrs in Richtung der Saugbewegung.
- Bei einer weiteren Ausführungsform des Staubsaugers mit einem Beschleunigungssensor als Vorrichtung zur Einstellung oder Beeinflussung einer Gebläseleistung ist vorgesehen, dass mit dem Beschleunigungssensor eine Vorwärts- oder Rückwärtsbewegung einer Saugdüse des Staubsaugers erkennbar ist. Dann kann die Einstellung oder Anpassung der Gebläseleistung an die Bewegungsrichtung der Saugdüse und damit den Bewegungsablauf beim Saugvorgang angepasst werden, zum Beispiel derart, dass bei einer Vorwärtsbewegung der Saugdüse eine erhöhte Gebläseleistung und bei einer Rückwärtsbewegung der Saugdüse eine verringerte Gebläseleistung wirksam ist. Für den Fall, dass der Beschleunigungssensor an einem Griffelement des Staubsaugers angebracht ist oder in ein solches Griffelement integriert ist, kann die Vorwärts- oder Rückwärtsbewegung einer Saugdüse dadurch erkennbar sein, dass das Griffelement fest über ein Saugrohr mit der Saugdüse verbunden ist.
- Bei einer zusätzlichen oder alternativen Ausführungsform eines Staubsaugers mit einem Beschleunigungssensor zur Einstellung oder Beeinflussung einer Gebläseleistung ist vorgesehen, dass mit dem Beschleunigungssensor eine Neigung eines stromaufwärts (stromaufwärts in Bezug auf den im Betrieb vorm Sauggebläse erzeugten Saugluftstrom) des Griffelements befindlichen Saugrohrs des Staubsaugers oder eine Neigung des Staubsaugers erkennbar ist. Eine Erfassung einer Neigung des Saugrohrs bezieht sich auf Staubsauger in einer Ausführungsform als Bodenstaubsauger. Eine Erfassung einer Neigung des Staubsaugers bezieht sich auf Staubsauger in einer Ausführungsform als Stabstaubsauger, Handstaubsauger oder Tischstaubsauger. Als Neigung wird dabei eine Abweichung von einer Bezugsposition verstanden und als Bezugsposition oder Bezugsorientierung soll hier und im Folgenden eine horizontale Bodenfläche angenommen werden. Ein flach auf dem Boden liegendes Saugrohr hat demnach also die Neigung Null und ein senkrecht gehaltenes Saugrohr hat eine Neigung von 90°.
- Indem eine solche Neigung erkennbar ist, kann die jeweilige Neigung zur Einstellung oder Beeinflussung der Gebläseleistung herangezogen werden. Zum Beispiel kann durch einfaches oder mehrfaches Anheben des Griffelements und die damit bewirkte Änderung der Neigung zum Beispiel des Saugrohrs bei einem Bodenstaubsauger zur Erhöhung der Gebläseleistung und entsprechend eine Änderung der Neigung durch Absenken des Griffelements zur Verringerung der Gebläseleistung ausgewertet werden. Alternativ zu einer solchen stufenartigen Anpassung der Gebläseleistung könnte die Leistungseinstellung auch kontinuierlich in Abhängigkeit von einer jeweiligen Neigung des Saugrohrs erfolgen. Dann wirkt das Saugrohr gleichsam wie ein großer Bedienhebel für den Staubsauger. Eine mittlere Neigung würde dabei zu einer mittleren Gebläseleistung führen. Wenn temporär eine höhere oder niedrigere Gebläseleistung benötigt wird, kann der Benutzer dies leicht durch eine Veränderung der Neigung des Saugrohrs erreichen.
- Alternativ bietet sich an, bei einer Neigung des Saugrohrs in Richtung auf eine eher flache Stellung des Saugrohrs die Gebläseleistung zu erhöhen, da bei einer solchen Neigung ein vergleichsweise besserer Hebel für die Schubbewegung zur Verfügung steht. Entsprechend würde bei einer stärkeren Neigung und entsprechend einer eher steilen Stellung des Saugrohrs die Gebläseleistung reduziert, so dass der dann eher ungünstige Hebel für die Schubbewegung zu einer reduzierten Gebläseleistung führt. Bei unterschiedlichen Neigungen des Saugrohrs ergibt sich damit für den Benutzer stets ein in etwa vergleichbarer Krafteinsatz bei den resultierenden verschiedenen Saugleistungen, speziell wenn bei einer geringeren Neigung und einer flacheren Orientierung des Saugrohrs der dann resultierende Hebel für die Schubbewegung leicht gegen die stärkere Ansaugung der Saugdüse an den jeweiligen Untergrund wirkt.
- Bei einer weiteren zusätzlichen oder alternativen Ausführungsform eines Staubsaugers mit einem als Vorrichtung zur Einstellung oder Beeinflussung einer Gebläseleistung fungierenden Beschleunigungssensor ist vorgesehen, dass mit dem Beschleunigungssensor eine Rotationslage und/oder eine Drehung des Griffelements erkennbar sind. Dann können solche Drehungen am Griffelement leicht in Signale zur Einstellung oder Beeinflussung einer Gebläseleistung des jeweiligen Sauggebläses umgesetzt werden. Zum Beispiel kann eine Linksdrehung des Griffelements zu einer Verringerung der Gebläseleistung und entsprechend eine Rechtsdrehung zu einer Erhöhung der Gebläseleistung führen. Auch bei einem über eine Drehung des Griffelements umgesetzten Bedienkonzept sind kontinuierliche oder diskrete Anpassungen der Gebläseleistung möglich. So kann zum Beispiel bei einer Drehung des Griffelements nach links die Gebläseleistung so lange kontinuierlich oder in vorgegebenen oder vorgebbaren diskreten Stufen verringert werden, wie das Griffelement durch den Benutzer in dieser gedrehten Position gehalten wird. Wenn die vom Benutzer gewünschte Saugleistung erreicht ist, wird das Griffelement wieder in eine Mittelstellung bewegt und die durch die vorherige Drehung des Griffelements erreichte Gebläseleistung gehalten. Entsprechendes gilt für eine Erhöhung der Gebläseleistung und eine Drehung des Griffelements nach rechts. Genauso kann durch einzelne oder mehrfache Drehbewegungen des Griffelements nach links oder rechts jeweils eine gestufte Anpassung der Gebläseleistung erfolgen. Beide Konzepte können auch kombiniert realisiert sein, derart, dass bei einer für länger als einen vorgegebenen Zeitraum anstehenden Drehung des Griffelements nach links oder rechts die Gebläseleistung kontinuierlich verringert oder erhöht wird und dass bei einer Drehung des Griffelements nach links oder rechts und einer anschließenden Drehung des Griffelements zurück in die Mittelstellung bei der Rückwärtsbewegung in die Mittelstellung eine gestufte Verringerung oder Erhöhung der Gebläseleistung erfolgt.
- Zur Verarbeitung des oder der am Beschleunigungssensor abgreifbaren Sensorsignals beziehungsweise Sensorsignale und zur Auswertung oder Erkennung der dadurch jeweils ausgedrückten Bedienhandlungen oder Bediensituationen kommt eine Logikeinheit zur Verarbeitung eines oder mehrerer von dem Beschleunigungssensor als Sensorsignal oder Sensorsignale gelieferten Beschleunigungsmesswerts in Betracht. Die Logikeinheit umfasst vorgegebene logische Verknüpfungen zur Verarbeitung eines solchen Beschleunigungsmesswerts oder solcher Beschleunigungsmesswerte. Die Logikeinheit kann auch vorgegebene logische Verknüpfungen für einen Vergleich und eine Verarbeitung eines solchen Beschleunigungsmesswerts oder solcher Beschleunigungsmesswerte von mehreren Beschleunigungssensoren umfassen. Auf dieser Basis ist die Logikeinheit zur Einstellung oder Beeinflussung der Gebläseleistung des Sauggebläses in Abhängigkeit vom Ergebnis der logischen Verknüpfungen wirksam. Als Logikeinheit kommt ein anwenderspezifischer integrierter Schaltkreis (ASIC) oder dergleichen oder auch die Implementation einer entsprechenden Funktionalität in Software in Betracht. Eine solche Logikeinheit bietet vielfältige und flexible Möglichkeiten zur Implementierung einzelner oder mehrerer logischer Verknüpfungen zur Verarbeitung zumindest eines von einem Beschleunigungssensor gelieferten Beschleunigungsmesswerts.
- Bei einer besonderen Ausführungsform eines Staubsaugers mit einer solchen Logikeinheit zur Einstellung der Gebläseleistung ist vorgesehen, dass in Form einer Mehrzahl logischer Verknüpfungen unterschiedliche Benutzungsszenarien des Staubsaugers angelegt sind und in Abhängigkeit vom Ergebnis der logischen Verknüpfungen und in Abhängigkeit vom damit jeweils erkannten Benutzungsszenario die Gebläseleistung einstellbar oder beeinflussbar ist. Dann kann zum Beispiel die Dauer, während derer ein bestimmter Beschleunigungsmesswert ansteht, für die Erkennung eines Benutzungsszenarios herangezogen werden, um eine momentan veränderte Neigung des Saugrohrs von einer länger andauernden Veränderung der Neigung des Saugrohrs und einem damit vom Benutzer angezeigten Wunsch nach Veränderung der Gebläseleistung zu unterschieden. Gleiches gilt für eine Situation, bei der die jeweilige Gebläseleistung durch eine Drehung des Griffelements beeinflussbar ist.
- Insgesamt betrifft die Erfindung damit auch ein Verfahren zum Betrieb eines Staubsaugers wie hier und nachfolgend beschrieben, wobei mit dem Beschleunigungssensor in Form von Beschleunigungsmesswerten zumindest eine Komponente der auf den Beschleunigungssensor wirkenden Erdbeschleunigung erfasst wird und wobei in Abhängigkeit von dem oder jedem erfassten Beschleunigungsmesswert eine Gebläseleistung eines von dem Staubsauger umfassten Sauggebläses verändert wird. Als dabei betrachtete Komponente des Staubsaugers, für die zumindest ein Beschleunigungsmesswert erfasst wird, kommt insbesondere ein Griffelement in Betracht, weil das Griffelement die natürliche Komponente ist, um einen Staubsauger während des Saugvorgangs zu bedienen, so dass anhand einer Position oder Orientierung des Griffelements optimal die jeweilige Saugsituation erkennbar ist. Eine weitere Komponente des Staubsaugers, für die zumindest ein Beschleunigungsmesswert erfasst werden kann, stellt die Saugdüse dar, weil die Saugdüse, fungierend als Bodendüse, die natürliche Komponente ist, die beim Saugvorgang auf flachem Untergrund vor und zurück bewegt wird, so dass anhand der Beschleunigung aus Vorwärtsbewegung und entgegengesetzter Rückwärtsbewegung die jeweilige Saugsituation erkennbar ist.
- Bei Ausführungsformen des Verfahrens ist vorgesehen, dass die Gebläseleistung kontinuierlich entsprechend eines mit dem Beschleunigungssensor erfassten Beschleunigungsmesswerts verändert wird und/oder dass die Gebläseleistung diskret um einen vorgegebenen oder vorgebbaren Betrag verändert wird, wenn ein mit dem Beschleunigungssensor erfasster Beschleunigungsmesswert einen vorgegebenen oder vorgebbaren Schwellwert über- oder unterschreitet.
- Als weitere Ausführungsformen des Verfahrens kommen alternativ oder kumulativ folgende Varianten in Betracht: Ein mit dem Beschleunigungssensor erfasster Beschleunigungsmesswert wird als Anhalt für eine Vorwärts- oder Rückwärtsbewegung einer Saugdüse des Staubsaugers ausgewertet und bei einer Vorwärtsbewegung wird die Gebläseleistung erhöht und bei einer Rückwärtsbewegung die Gebläseleistung verringert; ein mit dem Beschleunigungssensor erfasster Beschleunigungsmesswert wird als Anhalt für eine Neigung eines Saugrohrs des Staubsaugers ausgewertet und bei einer steilen Stellung des Saugrohrs die Gebläseleistung verringert und bei einer flachen Stellung des Saugrohrs die Gebläseleistung erhöht; ein mit dem Beschleunigungssensor erfasster Beschleunigungsmesswert wird als Anhalt für eine Drehung eines Griffelements des Staubsaugers ausgewertet und bei einer Drehung des Griffelements in eine erste Richtung die Gebläseleistung erhöht und bei einer Drehung des Griffelements in eine entgegengesetzte, zweite Richtung die Gebläseleistung verringert.
- Ein Ausführungsbeispiel der Erfindung ist in den Zeichnungen rein schematisch dargestellt und wird nachfolgend näher beschrieben. Einander entsprechende Gegenstände oder Elemente sind in allen Figuren mit den gleichen Bezugszeichen versehen. Das oder jedes Ausführungsbeispiel ist nicht als Einschränkung der Erfindung zu verstehen. Vielmehr sind im Rahmen der vorliegenden Offenbarung auch Abänderungen und Modifikationen möglich, die durch Kombination oder Abwandlung von einzelnen in Verbindung mit den im allgemeinen oder speziellen Beschreibungsteil beschriebenen sowie in den Ansprüchen und/oder der Zeichnung enthaltenen Merkmalen oder Verfahrensschritten für den Fachmann im Hinblick auf die Lösung der Aufgabe entnehmbar sind und durch kombinierbare Merkmale zu einem neuen Gegenstand oder zu neuen Verfahrensschritten führen.
- Es zeigen
- Figur 1
- einen Staubsauger in einer Ausführungsform als Bodenstaubsauger mit einem Beschleunigungssensor,
- Figur 2
- einen Teil eines Saugrohrs und ein zu dessen Führung vorgesehenes Griffelement des Staubsaugers aus
Figur 1 , - Figur 3
- einen Graph einer anhand von beim Beschleunigungssensor abgreifbaren Messwerten ermittelten Neigung eines Griffelements und einen Graph einer in Abhängigkeit davon eingestellten Gebläseleistung,
- Figur 4
- einen Teil eines Saugrohrs und ein zu dessen Führung vorgesehenes Griffelement wie in
Figur 2 , wobei das Griffelement und ein daran angebrachter Beschleunigungssensor drehbar sind, - Figur 5
- einen Graph einer anhand von beim Beschleunigungssensor abgreifbaren Messwerten ermittelten Rotationslage eines Griffelements und einen Graph einer in Abhängigkeit davon eingestellten Gebläseleistung,
- Figur 6
- einen Graph einer anhand von beim Beschleunigungssensor abgreifbaren Messwerten ermittelten Neigung eines Griffelements und einen Graph einer in Abhängigkeit davon kontinuierlich angepassten Gebläseleistung,
- Figur 7
- einen Graph einer anhand von beim Beschleunigungssensor abgreifbaren Messwerten ermittelten Neigung eines Griffelements und darin als Vorwärts- und Rückwärtsbewegungen erkennbare Abschnitte sowie einen diskontinuierlichen und einen kontinuierlichen Graph einer an die jeweilige Bewegungsrichtung angepassten Gebläseleistung und
- Figur 8
- einen Graph einer anhand von beim Beschleunigungssensor abgreifbaren Messwerten ermittelten Beschleunigung einer Saugdüse und darin als Vorwärts- und Rückwärtsbewegungen erkennbare Abschnitte sowie einen diskontinuierlichen und einen kontinuierlichen Graph einer an die jeweilige Bewegungsrichtung angepassten Gebläseleistung und
- Figur 9
- ein Blockschaltbild zur Verdeutlichung eines Wirkpfads vom Beschleunigungssensor zum Sauggebläse zur Einstellung oder Beeinflussung eine jeweiligen Gebläseleistung von zumindest einem mit dem Beschleunigungssensor erfassten Beschleunigungsmesswert.
-
Figur 1 zeigt schematisch vereinfacht einen Staubsauger 10 in einer Ausführungsform als Bodenstaubsauger. Dieser umfasst in an sich bekannter Art und Weise ein Gerätegehäuse 12 mit einem darin befindlichen und hier nicht dargestellten Sauggebläse, einen an das Gerätegehäuse 12 angeschlossenen Saugschlauch 14, ein am Ende des Saugschlauchs 14 befindliches Griffelement 16 und ein stromaufwärts des Griffelements 16 angebrachtes Saugrohr 18, an dessen Ende sich eine Saugdüse 20 in Form einer Bodendüse befindet. Das Griffelement 16 kommt als Ort zur Anbringung eines Beschleunigungssensors 22 in Betracht. Neben dem Griffelement kommt auch die Saugdüse 20 als Ort zur Anbringung eines Beschleunigungssensors 28 in Frage. Auch denkbar wäre die Anbringung des Beschleunigungssensors 28 im beweglichen Stutzen 21 der Saugdüse 20, der zum Anschluss der Saugdüse 20 an das Saugrohr dient. Diese letzte Ausführung ist jedoch nicht inFigur 1 dargestellt. Der Beschleunigungssensor 22, 28 fungiert als Vorrichtung zur Einstellung oder Beeinflussung einer Gebläseleistung des Sauggebläses des Staubsaugers 10, wobei die weitere Beschreibung am Beispiel eines Bodenstaubsaugers nicht als Beschränkung auszulegen ist, denn der hier vorgestellte Ansatz und das damit realisierbare Bedienkonzept kommen genauso für Staubsauger in anderen Ausführungsformen, insbesondere Stabstaubsauger, Handstaubsauger, Tischstaubsauger und so weiter, in Betracht. -
Figur 2 zeigt ein Detail des Saugrohrs 18 sowie im Vergleich zu der Darstellung inFigur 1 eine vereinfachte Darstellung des Griffelements 16. Im Bereich des Griffelements 16 ist der Beschleunigungssensor 22 gezeigt. Der dargestellte Ort und die dargestellte Größe des Beschleunigungssensors 22 ist lediglich im Hinblick auf eine leicht verständliche Illustration gewählt und der Beschleunigungssensor 22 ist entweder an dem Griffelement 16 angebracht oder in das Griffelement 16 integriert. Jedenfalls sind mit dem Beschleunigungssensor 22 Messwerte für die auf den Beschleunigungssensor 22 wirkende Erdbeschleunigung in drei unabhängigen Raumrichtungen ermittelbar. Die Erdbeschleunigung ist mit dem dafür üblicherweise verwendeten Formelzeichen g gezeigt und wirkt senkrecht nach unten. Wenn der Beschleunigungssensor 22, wie hier in der schematisch vereinfachten Seitenansicht gezeigt, Beschleunigungsmesswerte für die Wirksamkeit der Erdbeschleunigung in zumindest zwei Raumrichtungen liefert, kann anhand der beiden Messwerte, die hier symbolisch mit g cos ϕ und g sin ϕ gezeigt sind, die jeweilige Neigung des Saugrohrs 18 ermittelt werden. Die Neigung des Saugrohrs 18 ist inFigur 2 symbolisch mit dem Formelzeichen ϕ bezeichnet ist. Dieses wird auch im Folgenden zur jeweiligen Beschreibung der Neigung des Saugrohrs 18 verwendet. Ganz allgemein bedeutet eine eher steile Orientierung des Saugrohrs 18 einen starken Neigungswinkel und entsprechend eine eher flache Orientierung des Saugrohrs 18 einen geringen Neigungswinkel. Mit dem horizontalen, nach links weisenden Pfeil ist eine Richtung einer Vorwärtsbewegung 46 beim Saugvorgang eingezeichnet und auf diese Bewegungsrichtung wird im Weiteren ebenfalls Bezug genommen. -
Figur 3 zeigt zwei Graphen, nämlich im oberen Bereich einen Verlauf eines anhand der vom Beschleunigungssensor 22 gelieferten Beschleunigungsmesswerte ermittelten Neigungswinkels ϕ des Saugrohrs 18 und im unteren Bereich einen Graph einer mit dem Formelzeichen P bezeichneten Gebläseleistung eines Sauggebläses des jeweiligen Staubsaugers 10. Im oberen Bereich der Darstellung inFigur 3 erkennt man drei signifikante Abschnitte, in denen sich die Neigung ϕ des Saugrohrs 18 ändert. An der mit der Bezugsziffer 24 bezeichneten Position wird erstmalig das Saugrohr 18 in seiner Neigung ϕ verändert, derart, dass das Saugrohr 18 zumindest kurzfristig steiler gestellt ist (stärkere Neigung ϕ). Dies erfolgt später nochmals und zum Abschluss der Darstellung inFigur 3 ist mit der Bezugsziffer 26 eine Situation bezeichnet, bei der das Saugrohr 18 flacher gehalten wird (geringere Neigung ϕ). Solche Signalverläufe können zur Einstellung oder Beeinflussung einer Gebläseleistung P des jeweiligen Sauggebläses verwendet werden, wie im unteren Bereich der Darstellung inFigur 3 gezeigt ist. Danach wird jedes Mal, wenn die Neigung ϕ des Saugrohrs 18 für eine vorgegebene Dauer (hier ausgedrückt als Δt>T) erhöht ist, die Gebläseleistung P des Sauggebläses erhöht, wie an dem in zwei Stufen ansteigenden Graph der Gebläseleistung P erkennbar ist. Wenn abschließend gemäß der inFigur 3 dargestellten Situation während einer vorgegebenen oder vorgebbaren Dauer (Δt>T) die Neigung ϕ des Saugrohrs 18 verringert wird, das Saugrohr 18 also flacher gehalten wird, wird die Gebläseleistung P wieder reduziert und dies korreliert mit der absteigenden Stufe im Graph der Gebläseleistung P. -
Figur 4 illustriert, dass mit dem Beschleunigungssensor 22 nicht nur eine veränderte Neigung ϕ des Saugrohrs 18, sondern auch eine Drehung 50, 52 des Griffelements 16 erfassbar ist. Dazu zeigtFigur 4 einen Abschnitt des Saugrohrs 18 sowie das Griffelement 16 mit dem dortigen Beschleunigungssensor 22. Mit einer Drehbarkeit des Griffelements 16 oder einem drehbaren Abschnitt des Griffelements 16 ist auch durch eine Drehbewegung eine Einstellung oder Beeinflussung einer Gebläseleistung P des Sauggebläses des jeweiligen Staubsaugers 10 möglich. Auch wenn hier und im Folgenden von einem drehbaren Griffelement 16 gesprochen wird, ist für den Fachmann selbstverständlich, dass auch eine Drehbarkeit eines ringförmigen Teils des Griffelements 16 oder dergleichen und eine dortige Anbringung des Beschleunigungssensors 22 anstelle eines komplett drehbaren Griffelements 16 in Betracht kommen, so dass auch solche Ausführungsformen von der im Hinblick auf eine sprachlich knappe Darstellung gewählten Formulierung des drehbaren Griffelements 16 umfasst sein sollen. -
Figur 5 erläutert (in einer ähnlichen Darstellung wieFigur 3 ) die Wirkung eines mit einem drehbaren Griffelement 16 realisierbaren Bedienkonzepts. Dazu zeigtFigur 5 im oberen Bereich einen Graph eines anhand der vom Beschleunigungssensor 22 erhaltenen Beschleunigungsmesswerte ermittelten Drehwinkels des Griffelements 16, der hier symbolisch mit dem Formelzeichen β bezeichnet ist. Darunter ist über der gleichen Zeitbasis ein Verlauf der mit dem Formelzeichen P bezeichneten Gebläseleistung des Sauggebläses gezeigt. An der mit der Bezugsziffer 24 bezeichneten Position wird das Griffelement 16 erstmalig merklich zum Beispiel nach rechts gedreht und diese Rotationslage hält zumindest für eine vorgegebene Dauer (Δt>T) an, so dass mit dem Ablauf der vorgegebenen Dauer die Anpassung der Gebläseleistung P erfolgen kann, die hier in einer Verringerung der Gebläseleistung P besteht, was anhand der absteigenden Stufe des Graphen für die Gebläseleistung P erkennbar ist. Eine solche Reduktion der Gebläseleistung P erfolgt zu einem späteren Zeitpunkt durch eine nochmalige Rechtsdrehung 52 des Griffelements 16 erneut und zum Abschluss der Darstellung inFigur 5 ist mit der Bezugsziffer 26 eine Situation bezeichnet, bei der das Griffelement 16 eine Linksdrehung 50 erfährt. Auch diese Rotationslage hält für mehr als eine vorgegebene Zeitspanne T an, so dass am Ende der Zeitspanne eine Beeinflussung der Gebläseleistung P erfolgt. Nachdem die Rechtsdrehung 52 des Griffelements 16 eine Verringerung der Gebläseleistung P bewirkt, resultiert die Linksdrehung 50 des Griffelements 16 in einer Erhöhung der Gebläseleistung P, wie dies im unteren Bereich der Darstellung inFigur 5 anhand der ansteigenden Stufe im Graph der Gebläseleistung P erkennbar ist. - Während sich die Darstellungen in
Figur 3 undFigur 5 auf eine diskrete, also diskontinuierliche Veränderung der Gebläseleistung P beziehen, zeigt die Darstellung inFigur 6 , dass genauso auch eine kontinuierliche Einstellung der Gebläseleistung P, zum Beispiel in Abhängigkeit von der Neigung ϕ des Saugrohrs 18 (oder von der Drehung 50, 52 des Griffelements 16), erfolgen kann. InFigur 6 ist insofern eine Situation gezeigt, bei der sich das Saugrohr 18 zunächst in einer mittleren Neigung 35 befindet. Danach wird das Saugrohr 18 flacher gehalten (der Neigungswinkel ϕ nimmt also ab). Wenn das Saugrohr 18 flacher gehalten wird, kommt eine Erhöhung der Gebläseleistung P in Betracht, weil sich bei flacherem Saugrohr und dem sich dabei ergebenden Hebel trotz der bei höherer Gebläseleistung P stärkeren Ansaugung der Saugdüse 20 an den jeweils bearbeiteten Untergrund kein merklich erhöhter Kraftaufwand für den Benutzer ergibt. Eine Veränderung der Neigung ϕ des Saugrohrs 18 in Richtung auf eine flachere Stellung des Saugrohrs 18 wird also als Bedienhandlung des Benutzers zum Abruf einer größeren Gebläseleistung P aufgefasst undFigur 6 zeigt im unteren Bereich die mit der reduzierten Neigung ϕ des Saugrohrs 18 korrelierte erhöhte Gebläseleistung P. Bei der inFigur 6 gezeigten Situation wird das Saugrohr 18 zum Ende des betrachteten Zeitabschnitts steiler gehalten und die Gebläseleistung P wird zurückgenommen, denn bei einer steileren Stellung und einer entsprechend erhöhten Neigung des Saugrohrs 18 ergibt sich ein ungünstigerer Hebel hinsichtlich der Bewegung der Saugdüse 20, so dass eine Bewegung der Saugdüse 20 mit vergleichbarem Krafteinsatz nur dann möglich ist, wenn die Gebläseleistung P reduziert wird. Entsprechend wird eine steilere Ausrichtung des Saugrohrs 18 als Bedienhandlung zur Reduktion der Gebläseleistung P interpretiert. -
Figur 7 zeigt eine Anpassung der Gebläseleistung P des Sauggebläses entsprechend einer Vorwärtsbewegung 46 (Figur 2 ,Figur 8 ) und Rückwärtsbewegung 48 (Figur 2 ,Figur 8 ) der Saugdüse 20 beim Saugvorgang. Dafür ist mit zwei Graphen wie auch bei den vorangehendenFiguren 3 ,5 und6 im oberen Teil der Darstellung eine Neigung ϕ des Saugrohrs 18 und im unteren Teil der Darstellung eine Gebläseleistung P des Sauggebläses gezeigt. Die Graphen sind in drei Abschnitte, nämlich einen ersten, zweiten und dritten Abschnitt 30, 32, 34 unterteilt. Im ersten Abschnitt 30 beginnt die Neigung ϕ des Saugrohrs 18 oberhalb einer mittleren Neigung 35 und sinkt kontinuierlich bis zu einem Wert unterhalb einer mittleren Neigung 35 ab. Dies ist charakteristisch für eine Vorwärtsbewegung 46 einer Saugdüse 20 mittels eines Saugrohrs 18. Im zweiten Abschnitt 32 steigt die Neigung ϕ des Saugrohrs 18 von einem Wert unterhalb der mittleren Neigung 35 bis zu einem Wert oberhalb der mittleren Neigung 35, wie dies für eine Rückwärtsbewegung 48 (Figur 2 ,Figur 8 ) charakteristisch ist, und im dritten Abschnitt 34 sinkt der Wert der Neigung ϕ des Saugrohrs 18 wieder ähnlich wie im ersten Abschnitt 30. Die drei Abschnitte 30, 32, 34 stellen also die Veränderung der Neigung ϕ des Saugrohrs 18 bei einer Vorwärtsbewegung 46 (erster Abschnitt 30), einer anschließenden Rückwärtsbewegung 48 (zweiter Abschnitt 32) und einer folgenden Vorwärtsbewegung 46 (dritter Abschnitt 34) der Saugdüse 20 dar. Die Neigung ϕ Saugrohrs 18 lässt sich durch eine Anordnung des Beschleunigungssensors 22 im oder am Griffelement 16 als auch durch eine Anordnung des Beschleunigungsensors 28 im oder am Anschlussstutzen 21 der Saugdüse 20 ermitteln. - Die Anordnung des Beschleunigungssensors 28 in der Saugdüse 20 ist nicht im Detail dargestellt. Hier gilt jedoch Gleiches wie für den Beschleunigungssensor 22. Auch für den Beschleunigungssensor 28 sind Messwerte für die auf den Beschleunigungssensor 28 wirkende Erdbeschleunigung in drei unabhängigen Raumrichtungen ermittelbar. Über die senkrecht nach unten wirkende Erdbeschleunigung kann die Neigung der Saugdüse oder die Neigung des Anschlussstutzens 21 ermittelt werden. Von besonderer Bedeutung für die Anordnung des Beschleunigungssensors 28 in der Saugdüse 20 ist jedoch die Sensierung der Beschleunigungen der Saugdüse 20 in Vorwärtsbewegung 46 (
Figur 2 ,Figur 8 ) und entgegengesetzter Rückwärtsbewegung 48 (Figur 2 ,Figur 8 ) beim Saugvorgang. - Die Vorwärtsbewegung 46 und Rückwärtsbewegung 48 (
Figur 2 ,Figur 8 ) der Saugdüse beim Saugvorgang kann durch Anordnung des Beschleunigungssensors 28 in der Saugdüse 20 auch direkt erfasst werden. Denkbar ist aber auch eine Kombination mehrere Beschleunigungssensoren, in Saugdüse und Griffelement um die jeweilige Saugsituation genauer erkennbar zu machen. - Die Darstellung in
Figur 7 illustriert insgesamt, dass mit den bei einem Saugvorgang und den davon normalerweise umfassten Vorwärtsbewegung 46 (Figur 2 ,Figur 8 ) und Rückwärtsbewegungen 48 (Figur 2 ,Figur 8 ) der Saugdüse 20 Einstellungen oder Anpassungen der Gebläseleistung P des Sauggebläses des jeweiligen Staubsaugers 10 einhergehen können. Der untere Teil der Darstellung inFigur 7 zeigt dafür zwei Varianten. Zum einen kann die jeweils resultierende Gebläseleistung P entsprechend der Neigung ϕ des Saugrohrs 18 bei einer Vorwärtsbewegung 46 (Figur 2 ,Figur 8 ) oder Rückwärtsbewegung 48 (Figur 2 ,Figur 8 ) der Saugdüse 20 auf feste Gebläseleistungswerte eingestellt werden, wie dies in dem Graph 36 für feste Leistungswerte gezeigt ist. Die Umschaltung zwischen einem oberen festen Leistungswert und einem unteren festen Leistungswert erfolgt dabei zum Beispiel an ausreichend signifikanten Wendepunkten des Verlaufs der Neigung ϕ des Saugrohrs 18. Zum anderen kann in Abhängigkeit von der Neigung ϕ des Saugrohrs 18 genauso auch eine kontinuierliche Verstellung der Gebläseleistung erfolgen, wie dies mit dem Graph 38 im unteren Bereich der Darstellung inFigur 7 gezeigt ist, so dass die Gebläseleistung P zum Ende einer Vorwärtsbewegung 46 (Figur 2 ,Figur 8 ) kontinuierlich reduziert wird und beim Beginn einer Rückwärtsbewegung 48 (Figur 2 ,Figur 8 ) der Saugdüse 20 von einem niedrigen Wert kontinuierlich ansteigt, um bei einer anschließenden erneuten Vorwärtsbewegung 46 (Figur 2 ,Figur 8 ) der Saugdüse 20 wieder bei einem hohen Gebläseleistungswert zu beginnen. -
Figur 8 zeigt dass bei einem Saugvorgang und den davon normalerweise umfassten Vorwärtsbewegung 46 und Rückwärtsbewegungen 48 der Saugdüse 20 Einstellungen oder Anpassungen der Gebläseleistung P des Sauggebläses des jeweiligen Staubsaugers 10 einhergehen können. Der untere Teil der Darstellung inFigur 8 zeigt dafür zwei Varianten. Zum einen kann die jeweils resultierende Gebläseleistung P entsprechend der Beschleunigung ax der Saugdüse 20 bei einer Vorwärtsbewegung 46 und Rückwärtsbewegung 48 der Saugdüse 20 auf feste Gebläseleistungswerte eingestellt werden, wie dies in dem Graph 36 für feste Leistungswerte gezeigt ist. Die Umschaltung zwischen einem oberen festen Leistungswert und einem unteren festen Leistungswert erfolgt dabei zum Beispiel an ausreichend signifikanten Wendepunkten des Verlaufs der Beschleunigung ax der Saugdüse 20. Zum anderen kann in Abhängigkeit von der Beschleunigung ax der Saugdüse 20 genauso auch eine kontinuierliche Verstellung der Gebläseleistung erfolgen, wie dies mit dem Graph 38 im unteren Bereich der Darstellung inFigur 8 gezeigt ist, so dass die Gebläseleistung P zum Ende einer Vorwärtsbewegung 46 kontinuierlich reduziert wird und beim Beginn einer Rückwärtsbewegung 48 der Saugdüse 20 von einem niedrigen Wert kontinuierlich ansteigt, um bei einer anschließenden erneuten Vorwärtsbewegung 46 der Saugdüse 20 wieder bei einem hohen Gebläseleistungswert zu beginnen. - Allgemein kann über die hier explizit erwähnten Benutzungsszenarien hinaus aufgrund der beim Beschleunigungssensor 22 abgreifbaren Messwerte auch eine Einstellung oder Beeinflussung der Gebläseleistung P des jeweiligen Sauggebläses für andere Benutzungsszenarien erfolgen. Zum Beispiel kann, wenn das Saugrohr 18 nahezu waagerecht abgesenkt und gleichzeitig das Griffelement 16 um 90 Grad gedreht wird, damit die als Saugdüse 20 fungierende Bodendüse aufgrund ihrer gelenkigen Anbindung an das Saugrohr flach aufliegen kann, davon ausgegangen werden, dass unter einem niedrigen Möbelstück, zum Beispiel einem Sofa, gesaugt werden soll. Hier könnte die vorherige Gebläseleistung P des normalen Betriebs beibehalten werden. Sollte das Saugrohr 18 ohne Drehung 50, 52 des Griffelements 16 in die Waagerechte oder sogar steil nach oben gehalten werden, so ist davon auszugehen, dass Vorhänge oder Zimmerdecken abgesaugt werden. In diesem Fall könnte die Gebläseleistung P automatisch deutlich zurückgenommen werden. Darüber hinaus kann auch eine Unterbrechung oder Beendigung eines Saugvorgangs erkannt werden, denn bei einer solchen Unterbrechung oder Beendigung des Saugvorgangs wird das Saugrohr 18 häufig für eine längere Zeit in eine senkrechte Position, also eine sogenannte Parkposition, gebracht, so dass bei Erkennung einer solchen Neigung ϕ des Saugrohrs 18 das Sauggebläse komplett abgeschaltet werden könnte. Ein separater Schalter zur Erkennung der Parkposition, wie er bisher zur Deaktivierung des Sauggebläses bei Bestehen der Parkposition erforderlich ist, könnte dann entfallen. In ähnlicher Weise kann ein Ablegen des Saugrohrs 18 neben dem Staubsauger 10 erkannt und bei Ausbleiben weiterer Bewegungen des Saugrohrs 18 oder des Griffelements 16 das Sauggebläse abgeschaltet werden. Das Wiedereinschalten des Sauggebläses kann dann automatisch erfolgen, sobald Bewegungen des Griffelements 16 oder ein für das Saugen üblicher Neigungswinkel des Saugrohrs 18 erkannt werden.
-
Figur 9 zeigt abschließend ein schematisch vereinfachtes Blockschaltbild zur Verdeutlichung der Vorgänge bei einer Einstellung oder Beeinflussung einer Gebläseleistung P eines vom jeweiligen Staubsauger 10 umfassten Sauggebläses 40. Danach liefert der Beschleunigungssensor 22 ein oder mehrere Beschleunigungsmesswerte, die von einer Logikeinheit 42 verarbeitet werden. Die Logikeinheit 42 übernimmt die Verarbeitung des oder jedes vom Beschleunigungssensor 22 gelieferten Beschleunigungsmesswerts entsprechend vorgegebener logischer Verknüpfungen. Die Einstellung der Gebläseleistung P des Sauggebläses 40 erfolgt dann in Abhängigkeit vom Ergebnis dieser logischen Verknüpfungen.Figur 9 zeigt insoweit schematisch vereinfacht eine Mehrzahl von Logiknetzwerken 44 zur Implementierung solcher logischen Verknüpfungen, denen jeweils der oder jeder vom Beschleunigungssensor 22 gelieferte Beschleunigungsmesswert zugeführt wird. Jedes Logiknetzwerk 44 weist logische Verknüpfungen auf, mit denen eine bestimmte Benutzungssituation des Staubsaugers 10 oder eine bestimmte Bedienhandlung am Staubsauger 10 erkennbar ist. Zum Beispiel kann bei einer kontinuierlichen Anpassung der Gebläseleistung P des Sauggebläses 40 in Abhängigkeit von einer Neigung ϕ des Saugrohrs 18 ein erstes Logiknetzwerk 44 aufgrund des jeweils ermittelten Neigungswinkels ϕ des Saugrohrs 18 eine passende Gebläseleistung P ermitteln. Ein weiteres Logiknetzwerk 44 könnte sprunghafte Änderungen der Neigung ϕ des Saugrohrs 18 erkennen und überwachen, ob eine sprunghaft geänderte Neigung ϕ des Saugrohrs 18 länger als einen vorgegebenen Zeitraum (vgl.Figur 3 ) andauert. Wenn eines dieser beiden Logiknetzwerke 44 aktiv ist, kann entweder eine kontinuierliche oder eine sprunghafte Anpassung der Gebläseleistung P in Abhängigkeit von einer Neigung ϕ des Saugrohrs 18 erfolgen. Wenn beide Logiknetzwerke 44 gleichzeitig aktiv sind, kann die Logikeinheit 42 auf beide Benutzungsszenarien entsprechend entweder mit einer kontinuierlichen oder einer sprunghaften Anpassung der Gebläseleistung P reagieren. - Nach diesem Prinzip kann die Logikeinheit 42 weitere, gegebenenfalls auch einzeln aktivierbare oder deaktivierbare Logiknetzwerke 44 umfassen, um die anderen anhand der weiteren
Figuren 4-8 vorgestellten Benutzungsszenarien zu erfassen und bei Erkennung eines solchen Benutzungsszenarios und einer darin vorgenommenen Bedienhandlung eine entsprechende Einstellung oder Anpassung der Gebläseleistung P des Sauggebläses 40 zu bewirken. Auf einer Ausgangsseite der Logikeinheit 42 kann eine Verknüpfung oder gegenseitige Verriegelung der einzelnen von den Logiknetzwerken 44 jeweils generierten Signale erfolgen, um bei einer gleichzeitigen Aktivität mehrerer Logiknetzwerke 44 eine widersprüchliche Ansteuerung des Sauggebläses 40 mit einem jeweiligen Sollwert für die Gebläseleistung P zu verhindern. - Einzelne im Vordergrund stehende Aspekte der hier vorgelegten Beschreibung lassen sich damit kurz wie folgt zusammenfassen: Angegeben werden Staubsauger 10 mit einer Vorrichtung zur Einstellung einer Gebläseleistung eines von dem Staubsauger 10 umfassten Sauggebläses 40, wobei als Vorrichtung zur Einstellung einer Gebläseleistung ein Beschleunigungssensor 22 fungiert, sowie ein Verfahren zum Betrieb eines derartigen Staubsaugers, bei dem mit dem Beschleunigungssensor 22 zumindest ein Beschleunigungsmesswert erfasst und in Abhängigkeit davon die Gebläseleistung des Sauggebläses 40 verändert wird.
-
- 10
- Staubsauger
- 12
- Gerätegehäuse
- 14
- Saugschlauch
- 16
- Griffelement
- 18
- Saugrohr
- 20
- Saugdüse
- 22
- Beschleunigungssensor (Griffelement)
- 24
- Position des Saugrohrs (steiler) bzw. des Griffelements (nach rechts gedreht)
- 26
- Position des Saugrohrs (flacher) bzw. des Griffelements (nach links gedreht)
- 28
- Beschleunigungssensor (Saugdüse)
- 30
- erster Abschnitt
- 32
- zweiter Abschnitt
- 34
- dritter Abschnitt
- 35
- mittlere Neigung
- 36
- Graph für feste Leistungswerte
- 38
- Graph für kontinuierlich verstellte Leistungswerte
- 40
- Sauggebläse
- 42
- Logikeinheit
- 44
- Logiknetzwerk
- 46
- Vorwärtsbewegung
- 48
- Rückwärtsbewegung
- 50
- Linksdrehung
- 52
- Rechtsdrehung
Claims (11)
- Staubsauger (10) bei dem als Vorrichtung zur Einstellung einer Gebläseleistung eines von dem Staubsauger (10) umfassten Sauggebläses (40) ein Beschleunigungssensor (22) fungiert, welcher an oder in einem Griffelement (16) des Staubsaugers (10) angebracht ist ,
dadurch gekennzeichnet,
dass mit dem Beschleunigungssensor (22) eine Drehung (50, 52) des Griffelements (16) erkennbar ist. - Staubsauger (10) nach Anspruch 1
wobei ein Beschleunigungssensor (28) an einer Saugdüse (20) angebracht ist oder in eine solche Saugdüse (20) integriert ist. - Staubsauger (10) nach einem der vorangehenden Ansprüche,
wobei mit dem Beschleunigungssensor (22, 28) eine Vorwärts- oder Rückwärtsbewegung (46, 48) einer Saugdüse (20) des Staubsaugers (10) erkennbar ist. - Staubsauger (10) nach Anspruch 1 oder 2,
wobei mit dem Beschleunigungssensor (22) eine Neigung eines stromabwärts des Griffelements (16) befindlichen Saugrohrs (18) des Staubsaugers (10) oder eine Neigung des Staubsaugers (10) erkennbar ist. - Staubsauger (10) nach einem der vorangehenden Ansprüche,
mit einer Logikeinheit (42) zur Verarbeitung eines von dem Beschleunigungssensor (22, 28) gelieferten Beschleunigungsmesswerts entsprechend vorgegebener logischer Verknüpfungen und zur Einstellung der Gebläseleistung des Sauggebläses (40) in Abhängigkeit vom Ergebnis der logischen Verknüpfungen. - Staubsauger (10) nach Anspruch 5,
wobei in Form einer Mehrzahl logischer Verknüpfungen unterschiedliche Benutzungsszenarien des Staubsaugers (10) angelegt sind und wobei in Abhängigkeit vom Ergebnis der logischen Verknüpfungen und in Abhängigkeit vom damit jeweils erkannten Benutzungsszenario die Gebläseleistung einstellbar ist. - Verfahren zum Betrieb eines Staubsaugers (10) nach einem der vorangehenden Ansprüche,
wobei mit dem Beschleunigungssensor (22, zumindest ein Beschleunigungsmesswert einer Komponente des Staubsaugers (10) erfasst wird und als Anhalt für eine Drehung (50, 52) eines Griffelements (16) des Staubsaugers (10) ausgewertet wird und wobei bei einer Drehung (50, 52) des Griffelements (16) in eine erste Richtung die Gebläseleistung erhöht und bei einer Drehung (50, 52) des Griffelements (16) in eine entgegengesetzte, zweite Richtung die Gebläseleistung verringert wird. - Verfahren nach Anspruch 7,
wobei die Gebläseleistung kontinuierlich entsprechend eines mit dem Beschleunigungssensor (22, 28) erfassten Beschleunigungsmesswerts verändert wird. - Verfahren nach Anspruch 7,
wobei die Gebläseleistung diskret um einen vorgegebenen oder vorgebbaren Betrag verändert wird, wenn ein mit dem Beschleunigungssensor (22, 28) erfasster Beschleunigungsmesswert einen vorgegeben oder vorgebbaren Schwellwert über- oder unterschreitet. - Verfahren nach einem der Ansprüche 7 bis 9,
wobei ein mit dem Beschleunigungssensor (22, 28) erfasster Beschleunigungsmesswert als Anhalt für eine Vorwärts- oder Rückwärtsbewegung (46, 48) einer Saugdüse (20) des Staubsaugers (10) ausgewertet wird und wobei bei einer Vorwärtsbewegung (46) die Gebläseleistung erhöht und bei einer Rückwärtsbewegung (48) die Gebläseleistung verringert wird. - Verfahren nach einem der Ansprüche 7 bis 10,
wobei ein mit dem Beschleunigungssensor (22) erfasster Beschleunigungsmesswert als Anhalt für eine Neigung eines Saugrohrs (18) des Staubsaugers (10) ausgewertet wird und wobei bei einer steilen Stellung des Saugrohrs (18) die Gebläseleistung verringert und bei einer flachen Stellung des Saugrohrs (18) die Gebläseleistung erhöht wird..
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102012105845.8A DE102012105845A1 (de) | 2012-07-02 | 2012-07-02 | Staubsauger mit einer Vorrichtung zur Einstellung einer Gebläseleistung und Verfahren zum Betrieb eines solchen Staubsaugers |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2682034A2 EP2682034A2 (de) | 2014-01-08 |
| EP2682034A3 EP2682034A3 (de) | 2017-12-27 |
| EP2682034B1 true EP2682034B1 (de) | 2019-02-27 |
Family
ID=48795538
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13401061.0A Active EP2682034B1 (de) | 2012-07-02 | 2013-06-26 | Staubsauger mit einer Vorrichtung zur Einstellung einer Gebläseleistung und Verfahren zum Betrieb eines solchen Staubsaugers |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2682034B1 (de) |
| DE (1) | DE102012105845A1 (de) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015106885A1 (de) * | 2015-05-04 | 2016-11-10 | Miele & Cie. Kg | Staubsauger und Verfahren zum Steuern eines Saugbetriebs eines Staubsaugers |
| DE102015108464A1 (de) * | 2015-05-28 | 2016-12-01 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Betrieb eines elektromotorisch angetriebenen Gerätes |
| KR101842463B1 (ko) * | 2016-07-08 | 2018-03-27 | 엘지전자 주식회사 | 진공 청소기 및 청소기의 핸들 |
| DE102016120439A1 (de) * | 2016-10-26 | 2018-04-26 | Miele & Cie. Kg | Verfahren und Steuergerät zum Regeln einer Leistung eines Gebläses eines Staubsaugers und Staubsauger mit einem Steuergerät |
| FR3068839B1 (fr) * | 2017-07-07 | 2019-07-26 | Seb S.A. | Procede de regulation de la puissance d’aspiration d’un aspirateur balai sans fil |
| US11382477B2 (en) | 2017-12-18 | 2022-07-12 | Techtronic Floor Care Technology Limited | Surface cleaning device with automated control |
| EP3987994A1 (de) | 2017-12-18 | 2022-04-27 | Techtronic Floor Care Technology Limited | Oberflächenreinigungsvorrichtung mit flüssigkeitsverteilmechanismus ohne auslöser |
| EP3569124B1 (de) * | 2018-05-18 | 2021-08-18 | Miele & Cie. KG | Reinigungsgerät |
| DE102020200483A1 (de) | 2020-01-16 | 2021-07-22 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zur Steuerung eines Sauggeräts |
| GB2596861B (en) * | 2020-07-10 | 2023-01-04 | Dyson Technology Ltd | Vacuum cleaner |
| ES2910899A1 (es) * | 2020-11-13 | 2022-05-13 | Cecotec Res And Development Sl | Aparato electronico de limpieza y/o desinfeccion con medios de medicion inercial (imu) y metodo para operarlo |
| CN114652230A (zh) * | 2020-12-22 | 2022-06-24 | 美智纵横科技有限责任公司 | 清洁设备及其控制方法、设备和计算机程序产品 |
| CN113643954A (zh) * | 2021-07-07 | 2021-11-12 | 深圳拓邦股份有限公司 | 等离子体发生控制方法、装置及清洁仪 |
| DE202021002931U1 (de) | 2021-09-11 | 2021-10-01 | Matthias Jünemann | Equilateraler Flächenreiniger |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4427639A1 (de) * | 1993-12-04 | 1995-06-08 | Vorwerk Co Interholding | Mittels eines Elektromotors betriebener Staubsauger |
| DE69505255T2 (de) * | 1994-07-13 | 1999-05-27 | Moulinex Sa | Staubsauger mit fuzzy logic steuerung |
| DE19602723C2 (de) * | 1996-01-26 | 2001-04-19 | Gerhard Kurz | Vorrichtung zum Betrieb eines Staubsaugers |
| JPH11313789A (ja) * | 1998-05-06 | 1999-11-16 | Matsushita Electric Ind Co Ltd | 電気掃除機の制御装置 |
| JP2003319894A (ja) * | 2002-04-30 | 2003-11-11 | Toshiba Tec Corp | 吸込口体と電気掃除機 |
| DE10338874A1 (de) * | 2002-09-07 | 2004-03-18 | Vorwerk & Co. Interholding Gmbh | Staubsauger mit einem Elektromotor und einem Vorsatzgerät |
| US8438693B2 (en) * | 2006-09-11 | 2013-05-14 | Panasonic Corporation | Electric cleaner |
| JP4813433B2 (ja) * | 2007-08-29 | 2011-11-09 | シャープ株式会社 | 電気掃除機 |
| JP2011206351A (ja) * | 2010-03-30 | 2011-10-20 | Panasonic Corp | 電気掃除機 |
| WO2012077621A1 (ja) * | 2010-12-06 | 2012-06-14 | シャープ株式会社 | 電気掃除機 |
| JP2012148010A (ja) * | 2011-01-21 | 2012-08-09 | Panasonic Corp | 電気掃除機 |
-
2012
- 2012-07-02 DE DE102012105845.8A patent/DE102012105845A1/de not_active Withdrawn
-
2013
- 2013-06-26 EP EP13401061.0A patent/EP2682034B1/de active Active
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2682034A3 (de) | 2017-12-27 |
| EP2682034A2 (de) | 2014-01-08 |
| DE102012105845A1 (de) | 2014-01-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2682034B1 (de) | Staubsauger mit einer Vorrichtung zur Einstellung einer Gebläseleistung und Verfahren zum Betrieb eines solchen Staubsaugers | |
| EP3406162B1 (de) | Höhenverstellbares möbel und kabelsicherung für ein solches | |
| DE112014003585B4 (de) | Verringerte Unempfindlichkeit für Fahrzeugsteuerung mit Einzel-Joystickantrieb | |
| EP2679086B1 (de) | Selbstfahrende erntemaschine mit höhengeregeltem schneidwerk | |
| EP2222215B1 (de) | Vorrichtung zur steuerung oder regelung der motorleistung eines staubsaugers | |
| DE10207360B4 (de) | Sitz | |
| EP2245974B1 (de) | Verfahren zum Betrieb eines Vorsatzgeräts für einen Staubsauger und korrespondierendes Vorsatzgerät | |
| EP1790252B1 (de) | Ein Bedienkonzept zum Öffnen griffloser Schubladen, durch Drücken auf die Frontplatte, ohne dass ein grösserer Betätigungshub ausgeübt werden muss | |
| DE102009020842B4 (de) | System zum Steuern der Geschwindigkeit eines Elektromotors in einem Kraftfahrzeug | |
| EP2377445B1 (de) | Staubsauger mit einer Gebläseregelung | |
| EP2910097A1 (de) | Vibrationsdämpfende Ansteuerung eines Aktors einer landwirtschaftlichen Arbeitsmaschine | |
| EP2583586A1 (de) | Vorrichtung zur Erfassung von Kollisionen und entsprechendes Verfahren | |
| DE102016101954A1 (de) | Elektrisch verstellbares Möbelstück | |
| EP3162266B1 (de) | Reinigungsgerät und verfahren zum betrieb eines reinigungsgerätes | |
| DE102014221265B4 (de) | Mechanismus zur Steuerung eines höhenverstellbaren Möbels, insbesondere Tisches, und entsprechendes Verfahren hierfür | |
| EP1064162B1 (de) | Verfahren und vorrichtung zum betreiben eines verstellantriebs in einem kraftfahrzeug | |
| EP3108785A1 (de) | Staubsauger und verfahren zum betreiben eines staubsaugers | |
| EP2842471B1 (de) | Staubsauger mit einer Steuerung zur Einstellung der Gebläseleistung | |
| EP2691003B1 (de) | Verfahren zum saugdruckabhängigen betreiben eines staubsaugers | |
| DE202015102151U1 (de) | Elektrisch verstellbares Möbelstück | |
| DE102011101714A1 (de) | Verfahren einer elektrohydraulischen Hubwerksregelung und Bedieneinheit für eine elektrohydraulische Hubwerksregelung | |
| EP2781179B1 (de) | Verfahren zum Einstellen der Leistung eines Staubsaugergebläses, Regelungseinrichtung zur Umsetzung des Verfahrens und Staubsauger mit einer solchen Regelungseinrichtung | |
| AT507805A1 (de) | Auslösesensor für einen möbelantrieb | |
| EP3821778B1 (de) | Staubsauger und verfahren zum betrieb eines staubsaugers | |
| DE102020212648A1 (de) | Elektrohydraulische Anbaugerätesteuerung System und Verfahren |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: A47L 9/28 20060101AFI20171117BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20180116 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20181025 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R084 Ref document number: 502013012286 Country of ref document: DE |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1100147 Country of ref document: AT Kind code of ref document: T Effective date: 20190315 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502013012286 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: 746 Effective date: 20190312 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20190227 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190627 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190527 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190528 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190527 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190627 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502013012286 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| 26N | No opposition filed |
Effective date: 20191128 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190626 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190630 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190630 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190630 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190626 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1100147 Country of ref document: AT Kind code of ref document: T Effective date: 20190626 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190626 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20130626 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190227 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230529 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20230622 Year of fee payment: 11 Ref country code: DE Payment date: 20230630 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20230620 Year of fee payment: 11 |