EP2561777B1 - Synchronmechanik für einen Stuhl - Google Patents
Synchronmechanik für einen Stuhl Download PDFInfo
- Publication number
- EP2561777B1 EP2561777B1 EP12180206.0A EP12180206A EP2561777B1 EP 2561777 B1 EP2561777 B1 EP 2561777B1 EP 12180206 A EP12180206 A EP 12180206A EP 2561777 B1 EP2561777 B1 EP 2561777B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- axis
- articulated
- free
- base unit
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C3/00—Chairs characterised by structural features; Chairs or stools with rotatable or vertically-adjustable seats
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C1/00—Chairs adapted for special purposes
- A47C1/02—Reclining or easy chairs
- A47C1/031—Reclining or easy chairs having coupled concurrently adjustable supporting parts
- A47C1/032—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest
- A47C1/03255—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest with a central column, e.g. rocking office chairs
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C1/00—Chairs adapted for special purposes
- A47C1/02—Reclining or easy chairs
- A47C1/031—Reclining or easy chairs having coupled concurrently adjustable supporting parts
- A47C1/032—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest
- A47C1/03261—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest characterised by elastic means
- A47C1/03272—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest characterised by elastic means with coil springs
Definitions
- the invention relates to a synchronous mechanism for a chair, in particular for an office chair, comprising a base unit, a seat support arranged above and movably on the base unit, a backrest support pivotably mounted on the base unit about a horizontally and chair-oriented pivot axis, and a preloading mechanism the preloading device exerts on the seat support an upward and on the backrest support a forward biasing force and wherein the seat support is connected via a the mobility of the seat support relative to the base unit enabling coupling mechanism with the base unit.
- the invention relates to a chair, in particular an office chair.
- Out DE 199 31 099 A1 is a chair known with a synchronous mechanism.
- the mobility of the backrest and seat are mechanically coupled to each other via the synchronous mechanism.
- the synchronous mechanism comprises a base unit, via which the synchronizing mechanism is fastened to a central chair column, wherein the chair column is provided at the bottom with a base with castors.
- the padded seat is arranged on a seat carrier formed as a seat plate, which is connected via a coupling mechanism with the base unit.
- the coupling mechanism comprises on the floor facing the bottom of the seat plate arranged bearing supports on which vertically aligned slots are formed, in which arranged on the base unit bearing pins are guided.
- a compression spring assembly On the underside of the seat plate, a compression spring assembly is supported, which exerts on the seat plate an upward and on the backrest a forward biasing force. This ensures that the biasing force is dependent on the weight of each person sitting on the chair, whereby the seating comfort is to be improved.
- the object of the invention is to provide a synchronous mechanism with which a chair, in particular an office chair, can be produced, which offers optimum seating comfort, regardless of the respective type of weight loading of the seat.
- the coupling mechanism is designed such that it positively controls the movements of the seat support relative to the base unit such that the seat support is movable back and forth with fixed backrest support alone between positions, said the positions are parallel to each other.
- the synchronous mechanism according to the invention does not affect the size of the preload force, in which area the load of the seat or the seat support takes place with the weight of a user.
- no load type of the seat support with the weight of a user leads to a tilting of the seat support to a horizontal Axis, which would be associated with the above disadvantage.
- the synchronous mechanism according to the invention it is possible by the synchronous mechanism according to the invention to provide a chair, in particular an office chair, in which the biasing force is optimally regulated.
- the biasing device according to a compression spring arrangement DE 199 31 099 A1 or have a differently configured, but substantially the same effect arrangement. It is essential only that the preloading device is designed and arranged such that it can be actuated by a movement of the seat support relative to the base unit.
- the coupling mechanism has a arranged in the front region of the seat support front and a rear portion thereof disposed rear hinge assembly, wherein the front hinge assembly and the rear hinge assembly are mechanically coupled together such that movement of the front hinge assembly movement of the rear hinge assembly and vice versa causes.
- This mechanical design of the coupling mechanism is very robust.
- the two joint arrangements are preferably designed such that they prevent tilting of the seat support about an axis oriented in the chair longitudinal direction.
- the mechanical coupling of the front hinge assembly with the rear hinge assembly preferably causes the seat support to not tilt about an axis oriented in the chair transverse direction.
- each hinge assembly on two hinge units which are arranged spaced from each other with respect to the chair transverse direction and mechanically coupled to each other such that a movement of the one hinge unit causes movement of the other hinge unit.
- This mechanical coupling causes the seat support is not tilted about an axis aligned in chair longitudinal direction axis.
- the seat support is formed substantially rectangular with respect to the horizontal, wherein one of the hinge units is arranged in each corner region of the seat support.
- each front joint unit has two elements which are connected to one another in an articulated manner via a free first axis of which the upper element is hinged at the other end to the base unit and the seat support via a second axis and the lower element is hinged to the base unit via a third axis, the free first, second and third axes being parallel to and spaced from each other are arranged from the pivot axis, wherein the second axis is guided in the vertical direction end in slots on the base unit, wherein the free first axis in front of the second and the third axis is arranged and wherein the free first, the second and the third axis of the one front hinge unit form the free first, second and third axis of the other front hinge unit.
- each rear hinge unit has two members pivotally interconnected by a free fourth axis, of which the upper member is otherwise pivotally connected to the base unit via a fifth axis and the lower member is connected via a sixth axis wherein the free fourth, fifth and sixth axes are parallel to and spaced from the pivot axis, the sixth axis being guided end to end in slots on the base unit, the free fourth axis being behind the fifth and sixth axes and wherein the free fourth, fifth and sixth axes of the one rear hinge unit form the free fourth, fifth and sixth axes of the other rear hinge unit.
- the rear hinge units are designed structurally simple and robust.
- each rear hinge unit on a coupling element which is connected at one end pivotally connected via a seventh axis with the seat support and the other via the sixth axis to the base unit, wherein the seventh axis of a rear hinge unit, the seventh axis of forms another rear joint unit.
- the coupling element is thus connected via the sixth axis with the hinge units of the rear hinge assembly.
- one of the coupling elements is arranged in each corner region of a seat carrier which is substantially rectangular with respect to the horizontal.
- the free first axis is connected to the free fourth axis via at least one rigidly designed control element.
- the arrangement of the control causes the mechanical coupling of front hinge assembly and rear hinge assembly.
- two control elements are provided, which are arranged in the chair longitudinal direction and via which in each case the arranged on one side of the seat support front hinge unit is connected to the rear hinge unit arranged on this side.
- the magnitude of the biasing force exerted by the biasing means is adjustable. This can be done by the user of the synchronous mechanism or a chair equipped with it even a very individual adjustment of seating comfort.
- the preloading device comprises at least one compression spring arrangement which is supported on the underside of the seat support and on the upper side of a portion of the backrest support extending forwards beyond the pivot axis. It can be provided depending on the application, two or more compression spring arrangements.
- the biasing means may comprise at least one tension spring which engages with one end on the free first axis and with the other end on the backrest support, such that they the free first axis in the direction of the rear hinge assembly and the Backrest support pushes forward.
- two or more tension springs may be provided. By the force of the tension spring, the two joint units of the front joint arrangement are preferably erected and converted into a state corresponding to the unloaded state of the synchronous mechanism.
- the invention also proposes a chair, in particular an office chair, which according to the invention is designed with a synchronizing mechanism according to one of the above-described embodiments or any combination thereof.
- a chair in particular an office chair, which according to the invention is designed with a synchronizing mechanism according to one of the above-described embodiments or any combination thereof.
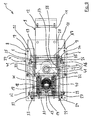
- FIG. 1 shows an embodiment of the synchronous mechanism 1 according to the invention for a chair, not shown, in particular office chair, in the unloaded state.
- the synchronizing mechanism 1 has a base unit 2, via which the synchronizing mechanism 1 is connected to a central chair column 3.
- the synchronizing mechanism 1 comprises a seat support 4 which is arranged above and movably on the base unit 2 and which is designed in two parts according to the exemplary embodiment and has the seat support elements 5 and 6 which are designed as metal profiles bent at right angles.
- the seat support elements 5 and 6 which are designed as metal profiles bent at right angles.
- substantially horizontally extending portion 7 of the seat support members 5 and 6 holes 8 are arranged, via which a seat, not shown, connectable to the seat support 4, for example, screwed, is.
- the synchronizing mechanism 1 also has a backrest support 9 which is pivotable about a pivot axis S oriented horizontally and in the chair transverse direction and which comprises a connecting part 10 directly connected to the pivot axis S and a back part 11 connected thereto, wherein on the back part 11 Also holes 12 are formed, via which a backrest, not shown, with the backrest support 9 is connectable.
- the synchronizing mechanism 1 comprises a compression spring arrangement 13 which is supported on the underside of the seat support 4 and exerts on the seat support 4 an upward and on the backrest support 9 a forward biasing force.
- the compression spring arrangement 13 has a compression spring 14, an upper bearing element 15 and a in FIG. 2 shown lower bearing element 16.
- the compression spring 14 Via the upper bearing element 15, the compression spring 14 is supported on the underside of a crossbar 17 of the seat support 4, which are formed in slots 20 at the aligned in the vertical direction sections 19 and 20 of the seat support members 5 and 6.
- the elongated holes 19 and 20 are formed such that at least two different biasing forces are adjustable over them, which in the embodiment shown by the fact that the crossbar 18 is brought into abutment with one or the other end of the slots. In the illustrated position of the crossbar a lower biasing force is set.
- the seat support 4 is connected via a the mobility of the seat support 4 relative to the base unit 2 enabling coupling mechanism with the base unit 2, which will be explained in more
- the coupling mechanism has a front joint arrangement 21 arranged in the front region of the seat support 4 and a rear joint arrangement 22 arranged in the rear region of the seat support 4.
- the front hinge assembly 21 and the rear hinge assembly 22 are mechanically coupled together such that movement of the front hinge assembly 21 causes movement of the rear hinge assembly 22 and vice versa, as will become apparent hereinafter. This prevents that the seat support 4 tilts around an aligned in chair transverse direction, unspecified axis.
- Each hinge assembly 21 and 22 has two hinge units 23 and 24 and 25 and 26, respectively, which are spaced apart from each other with respect to the chair transverse direction and mechanically coupled to each other such that movement of one hinge unit 23 or 25 causes movement of the other hinge unit 24 and 26, respectively ,
- this mechanical coupling the seat support 4 is prevented from tipping over an axis oriented unspecified in chair longitudinal direction in the event of asymmetrical weight loading.
- the front articulation unit 24 has two elements 27 and 28 which are connected to one another in a single manner via a free first axis A1.
- the upper element 27 is hinged at the other end via a second axis A2 with the base unit 2 and the seat support 4 and the lower element 28 at the other end via a third axis A3 to the base unit 2.
- the free first axis A1, the second axis A2 and the third axis A3 are arranged parallel to and spaced from the pivot axis S.
- the second axis A2 is guided in the vertical direction end in slots 29 on the base unit 2, whereby the mobility of the seat support 4 in the vertical direction is limited relative to the base unit 2. Furthermore, the second axis A2 is guided in horizontal oblong holes 30 at the vertically aligned sections 19 and 20 of the seat support elements 5 and 6, the function of which FIGS. 5 to 8 becomes clear.
- the free first axis A1 is arranged in front of the second axis A2 and the third axis A3.
- the free first axis A1, the second axis A2 and the third axis A3 of a front hinge unit 23 form the free first axis A1, the second axis A2 and the third axis A3 of other front hinge unit 24.
- first free axis A1 engage two tension springs 31 and 32, which cooperate with their other ends with a cross bar 33 which is fixed to the connecting part 10 of the backrest support 9.
- tension springs 31 and 32 By means of the tension springs 31 and 32, the first free axis A1 is acted upon by force such that the front hinge units 23 and 24 endeavor to raise themselves.
- Each rear articulation unit 25 or 26 has two elements 34 and 35, which are connected to one another in an articulated manner via a free fourth axis A4, which is clearer FIG. 2 becomes.
- the upper element 34 is connected at the other end via a fifth axis A5 and the lower element 35 at the other end pivotally connected to the base unit 2 via a sixth axis A6.
- the free fourth axis A4, the fifth axis A5 and the sixth axis A6 are arranged parallel to and spaced from the pivot axis S.
- the sixth axis A6 is guided in the vertical direction at the end in oblong holes on the base unit 2.
- the free fourth axis A4 is located behind the fifth axis A5 and the sixth axis A6.
- the free fourth axis A4, the fifth axis A5 and the sixth axis A6 of the one rear hinge unit 25 and 26 form the free fourth axis A4, the fifth axis A5 and the sixth axis A6 of the other rear hinge unit 26 and 25, respectively.
- Each rear hinge unit 25 or 26 also has a coupling element 37 or 38, of which in FIG. 1 only the coupling element 37 can be seen.
- Each coupling element 37 or 38 is pivotally connected to the seat support 4 at one end via a seventh axis A7 and is hingedly connected to the base unit 2 via the sixth axis A6.
- the seventh axis A7 of the one rear joint unit 25 or 26 forms the seventh axis A7 of the other rear joint unit 26 and 25, respectively.
- the seventh axis A7 is connected to the crossbar 33 via two rockers 41.
- the coupling elements 37 and 38 are thus connected to the rear elements 34 and 35 via the sixth axis A6. Through the coupling elements 37 and 38, movements of the seat support 4 on the rear hinge units 25 and 26 act.
- the free first axis A1 is connected to the free fourth axis A4 via two rigidly formed control elements 39 and 40.
- the compression spring 14 of the compression spring assembly 13 is compressed.
- the second axis A2 and the sixth axis A6 are displaced in the respective oblong holes 29 and 36, respectively.
- These movements are mechanically coupled to each other by means of the controls 39 and 40.
- the front joint unit 24 is actuated by weight load of the seat support 4, the first free axis A1 moves in the Figures 2 and 4 to the left.
- the free fourth axis A4 is also moved to the left via the controls 39 and 40, which in turn causes a movement of the sixth axis A6 in the oblong holes 36 down.
- the coupling elements 37 and 38 are taken, which in turn take the seat support 4 and thereby a shift of the right in the Figures 2 and 4 shown, cause the rear part of the seat support 4, so that a parallel displacement of the entire seat support 4 relative to the base unit 2 takes place.
- mechanical reversal takes place on actuation of the rear hinge units 25 and 26 as it were an actuation of the front hinge units 23 and 24 to cause an exclusively parallel displacement of the entire seat support 4.
- FIGS. 5 to 8 show that in the FIGS. 1 to 4 In this state of the synchronous mechanism 1, the second axis A2 is located at the front stop of the elongated holes 30 in the vertical sections 19 and 20 of the seat support elements 5 and 6. At the same time, the tension springs 31 and 32 stretched.
- the actuating mechanism of the front hinge units 23 and 24 and the rear hinge units 25 and 26 corresponds to the above with respect to the FIGS. 1 to 4 described.
- FIG. 9 shows that in the FIGS. 1 to 4 shown embodiment of the synchronous mechanism 1 according to the invention in a transparent view from above and illustrates once again the spatial arrangement of the components of the synchronous mechanism 1 to each other.
- tension springs 31 and 32 can be designed such that they assume the same function as the compression spring arrangement 13 or even replace it.
Description
- Die Erfindung betrifft eine Synchronmechanik für einen Stuhl, insbesondere für einen Bürostuhl, mit einer Basiseinheit, einem oberhalb und bewegbar an der Basiseinheit angeordneten Sitzträger, einem um eine horizontal und in Stuhl-Querrichtung ausgerichtete Schwenkachse schwenkbar an der Basiseinheit angeordneten Rückenlehnenträger und einer Vorbelastungseinrichtung, wobei die Vorbelastungseinrichtung auf den Sitzträger eine nach oben und auf den Rückenlehnenträger eine nach vorne wirkende Vorbelastungskraft ausübt und wobei der Sitzträger über eine die Bewegbarkeit des Sitzträgers relativ zu der Basiseinheit ermöglichende Kopplungsmechanik mit der Basiseinheit verbunden ist.
- Des Weiteren betrifft die Erfindung einen Stuhl, insbesondere einen Bürostuhl.
- Aus
DE 199 31 099 A1 ist ein Stuhl mit einer Synchronmechanik bekannt. Die Bewegbarkeiten von Rückenlehne und Sitz sind über die Synchronmechanik mechanisch aneinandergekoppelt. Die Synchronmechanik umfasst eine Basiseinheit, über die die Synchronmechanik an einer zentralen Stuhlsäule befestigt ist, wobei die Stuhlsäule bodenseitig mit einem Fußkreuz mit Rollen versehen ist. Der gepolsterte Sitz ist auf einem als Sitzplatte ausgebildeten Sitzträger angeordnet, der über eine Kopplungsmechanik mit der Basiseinheit verbunden ist. Die Kopplungsmechanik umfasst an der dem Boden zugewandten Unterseite der Sitzplatte angeordnete Lagerstützen, an denen vertikal ausgerichtete Langlöcher ausgebildet sind, in denen an der Basiseinheit angeordnete Lagerbolzen geführt sind. An der Unterseite der Sitzplatte stützt sich eine Druckfederanordnung ab, die auf die Sitzplatte eine nach oben und auf die Rückenlehne eine nach vorne wirkende Vorbelastungskraft ausübt. Hierdurch wird erreicht, dass die Vorbelastungskraft abhängig vom Gewicht der jeweilig auf dem Stuhl sitzenden Person ist, wodurch der Sitzkomfort verbessert werden soll. - Nachteilig bei der Synchronmechanik gemäß
DE 199 31 099 A1 ist, dass die auf den Rückenlehnenträger einwirkende Vorbelastungskraft davon abhängt, wie das auf dem Sitz beziehungsweise dem Sitzträger lastende Gewicht bezüglich der Horizontalen verteilt ist. Sitzt beispielsweise ein Benutzer des Stuhls nur auf dem vorderen Rand oder im Wesentlichen auf einem hinteren Bereich des Sitzes, kippt der Sitz um eine horizontal und in Stuhl-Querrichtung ausgerichtete Achse. Sitzt ein Benutzer hingegen zu einem seitlichen Bereich des Sitzes hin versetzt auf dem Sitz, kippt der Sitz um eine horizontal und in Stuhl-Längsrichtung ausgerichtete Achse. Klar ist, dass der Sitz durch derartige asymmetrische Belastungen auf beliebige Art und Weise um beide dieser Achsen gekippt werden kann, was einer schwimmenden Lagerung des Sitzes gleichkommt. Durch diese schwimmende Lagerung des Sitzes kann es beispielsweise dazu kommen, dass die Sitzplatte derart gekippt wird, dass zumindest ein an der Basiseinheit angeordneter Lagerbolzen am oberen Ende des an der jeweiligen Lagerstütze ausgebildeten Langlochs anschlägt, wodurch ein Teil des auf dem Sitz lastenden Gewichts über diesen Lagerbolzen unmittelbar von der Basiseinheit getragen wird und nicht mehr zur Stauchung der Druckfeder der Druckfederanordnung und somit zur Einwirkung auf die Synchronmechanik zur optimalen Einstellung der Vorbelastungskraft zur Verfügung steht. Damit ist eine deutliche Verschlechterung des angestrebten Sitzkomforts verbunden. - Aufgabe der Erfindung ist es, eine Synchronmechanik bereitzustellen, mit der ein Stuhl, insbesondere ein Bürostuhl, herstellbar ist, der optimalen Sitzkomfort unabhängig von der jeweiligen Art der Gewichtsbelastung des Sitzes bietet.
- Diese Aufgabe wird bei einer Synchronmechanik der eingangs genannten Art erfindungsgemäß dadurch gelöst, dass die Kopplungsmechanik derart ausgebildet ist, dass sie die Bewegungen des Sitzträgers relativ zu der Basiseinheit derart zwangssteuert, dass der Sitzträger bei festgelegtem Rückenlehnenträger allein zwischen Stellungen hin und her bewegbar ist, wobei die Stellungen zueinander parallel sind.
- Mit der erfindungsgemäße Synchronmechanik beziehungsweise ihrer Kopplungsmechanik wirkt es sich nicht auf die Größe der Vorbelastungskraft aus, in welchem Bereich die Belastung des Sitzes beziehungsweise des Sitzträgers mit dem Gewicht eines Nutzers erfolgt. Insbesondere kommt es bei keiner Belastungsart des Sitzträgers mit dem Gewicht eines Nutzers zu einem Kippen des Sitzträgers um eine horizontale Achse, was mit dem oben genannten Nachteil verbunden wäre. Stattdessen ist es durch die erfindungsgemäße Synchronmechanik möglich, einen Stuhl, insbesondere einen Bürostuhl, zu schaffen, bei dem die Vorbelastungskraft optimal reguliert wird.
- Im Rahmen der Erfindung kann die Vorbelastungseinrichtung eine Druckfederanordnung entsprechend
DE 199 31 099 A1 oder eine anders ausgestaltete, jedoch im Wesentlichen gleichwirkende Anordnung aufweisen. Wesentlich ist allein, dass die Vorbelastungseinrichtung derart ausgebildet und angeordnet ist, dass sie durch eine Bewegung des Sitzträgers relativ zu der Basiseinheit betätigbar ist. - Nach einer vorteilhaften Ausgestaltung der Erfindung weist die Kopplungsmechanik eine im vorderen Bereich des Sitzträgers angeordnete vordere und eine im hinteren Bereich desselben angeordnete hintere Gelenkanordnung auf, wobei die vordere Gelenkanordnung und die hintere Gelenkanordnung mechanisch derart aneinandergekoppelt sind, dass eine Bewegung der vorderen Gelenkanordnung eine Bewegung der hinteren Gelenkanordnung und umgekehrt bewirkt. Diese mechanische Ausgestaltung des Kopplungsmechanismus ist sehr robust. Die beiden Gelenkanordnungen sind vorzugsweise derart ausgebildet, dass sie ein Kippen des Sitzträgers um eine in Stuhl-Längsrichtung ausgerichtete Achse verhindern. Die mechanische Kopplung der vorderen Gelenkanordnung mit der hinteren Gelenkanordnung bewirkt vorzugsweise, dass der Sitzträger nicht um eine in Stuhl-Querrichtung ausgerichtete Achse kippbar ist.
- Gemäß einer weiteren vorteilhaften Ausgestaltung der Erfindung weist jede Gelenkanordnung zwei Gelenkeinheiten auf, die bezüglich der Stuhl-Querrichtung beabstandet voneinander angeordnet und mechanisch derart aneinandergekoppelt sind, dass eine Bewegung der einen Gelenkeinheit eine Bewegung der anderen Gelenkeinheit bewirkt. Durch diese mechanische Kopplung wird bewirkt, dass der Sitzträger nicht um eine in Stuhl-Längsrichtung ausgerichtete Achse kippbar ist. Vorzugsweise ist der Sitzträger bezüglich der Horizontalen im Wesentlichen rechteckig ausgebildet, wobei in jedem Eckbereich des Sitzträgers eine der Gelenkeinheiten angeordnet ist.
- Eine weitere vorteilhafte Ausgestaltung sieht vor, dass jede vordere Gelenkeinheit zwei einendig über eine freie erste Achse gelenkig miteinander verbundene Elemente aufweist, von denen das obere Element anderendig über eine zweite Achse gelenkig mit der Basiseinheit und dem Sitzträger und das untere Element anderendig über eine dritte Achse gelenkig mit der Basiseinheit verbunden ist, wobei die freie erste, die zweite und die dritte Achse parallel zu und beabstandet von der Schwenkachse angeordnet sind, wobei die zweite Achse in vertikaler Richtung endseitig in Langlöchern an der Basiseinheit geführt ist, wobei die freie erste Achse vor der zweiten und der dritten Achse angeordnet ist und wobei die freie erste, die zweite und die dritte Achse der einen vorderen Gelenkeinheit die freie erste, die zweite und die dritte Achse der anderen vorderen Gelenkeinheit bilden. Dieses stellt eine konstruktiv einfache und dennoch robuste Ausgestaltung der vorderen Gelenkeinheiten dar.
- Es wird des Weiteren für vorteilhaft erachtet, wenn jede hintere Gelenkeinheit zwei einendig über eine freie vierte Achse gelenkig miteinander verbundene Elemente aufweist, von denen das obere Element anderendig über eine fünfte Achse und das untere Element anderendig über eine sechste Achse gelenkig mit der Basiseinheit verbunden ist, wobei die freie vierte, die fünfte und die sechste Achse parallel zu und beabstandet von der Schwenkachse angeordnet sind, wobei die sechste Achse in vertikaler Richtung endseitig in Langlöchern an der Basiseinheit geführt ist, wobei die freie vierte Achse hinter der fünften und der sechsten Achse angeordnet ist und wobei die freie vierte, die fünfte und die sechste Achse der einen hinteren Gelenkeinheit die freie vierte, die fünfte und die sechste Achse der anderen hinteren Gelenkeinheit bilden. Hiernach sind auch die hinteren Gelenkeinheiten konstruktiv einfach und robust ausgestaltet.
- Nach einer weiteren vorteilhaften Ausführungsform der Erfindung weist jede hintere Gelenkeinheit ein Kopplungselement auf, das einendig über eine siebte Achse gelenkig mit dem Sitzträger und anderendig über die sechste Achse gelenkig mit der Basiseinheit verbunden ist, wobei die siebte Achse der einen hinteren Gelenkeinheit die siebte Achse der anderen hinteren Gelenkeinheit bildet. Das Kopplungselement ist somit über die sechste Achse mit den Gelenkeinheiten der hinteren Gelenkanordnung verbunden. Über das Kopplungselement wirken Bewegungen des Sitzträgers auf die hinteren Gelenkeinheiten ein. Vorzugsweise ist in jedem Eckbereich eines bezüglich der Horizontalen im Wesentlichen rechtwinklig ausgebildeten Sitzträgers eines der Kopplungselemente angeordnet.
- Des Weiteren wird vorgeschlagen, dass die freie erste Achse über wenigstens ein starr ausgebildetes Steuerelement mit der freien vierten Achse verbunden ist. Die Anordnung des Steuerelementes bewirkt die mechanische Kopplung von vorderer Gelenkanordnung und hinterer Gelenkanordnung. Vorzugsweise sind zwei Steuerelemente vorgesehen, die in Stuhl-Längsrichtung angeordnet sind und über die jeweils die an einer Seite des Sitzträgers angeordnete vordere Gelenkeinheit mit der an dieser Seite angeordneten hinteren Gelenkeinheit verbunden ist.
- Vorzugsweise ist die Stärke der durch die Vorbelastungseinrichtung ausgeübten Vorbelastungskraft einstellbar. Hierdurch kann durch den Nutzer der Synchronmechanik beziehungsweise eines damit ausgestatteten Stuhls selbst eine sehr individuelle Einstellung des Sitzkomforts erfolgen.
- Vorteilhafterweise umfasst die Vorbelastungseinrichtung wenigstens eine sich an der Unterseite des Sitzträgers und an der Oberseite eines sich nach vorne über die Schwenkachse hinaus erstreckenden Abschnitts des Rückenlehnenträgers abstützende Druckfederanordnung. Es können je nach Anwendungsfall auch zwei oder mehrere Druckfederanordnungen vorgesehen sein.
- Alternativ oder zusätzlich zu der zuletzt genannten Ausgestaltung kann die Vorbelastungseinrichtung wenigstens eine Zugfeder umfassen, die mit einem Ende an der freien ersten Achse und mit dem anderen Ende an dem Rückenlehnenträger angreift, derart, dass sie die freie erste Achse in Richtung der hinteren Gelenkanordnung und den Rückenlehnenträger nach vorne drängt. Auch hier können je nach Anwendungsfall zwei oder mehrere Zugfedern vorgesehen sein. Durch die Kraft der Zugfeder werden vorzugsweise die beiden Gelenkeinheiten der vorderen Gelenkanordnung aufgerichtet und in einen Zustand überführt, der dem unbelasteten Zustand der Synchronmechanik entspricht.
- Mit der Erfindung wird zudem ein Stuhl, insbesondere ein Bürostuhl, vorgeschlagen, der erfindungsgemäß mit einer Synchronmechanik nach einer der vorbeschriebenen Ausgestaltungen oder einer beliebigen Kombination derselben ausgestaltet ist. Damit sind die oben mit Bezug auf die Synchronmechanik beschriebenen Vorteile verbunden.
- Weitere Vorteile und Merkmale der vorliegenden Erfindung werden anhand des in den beiliegenden Figuren gezeigten Ausführungsbeispiels für die erfindungsgemäße Synchronmechanik näher erläutert. Dabei zeigen
- Figur 1:
- eine perspektivische Darstellung eines Ausführungsbeispiels für die erfindungsgemäße Synchronmechanik in unbelastetem Zustand mit aufgerichtetem Rückenlehnenträger,
- Figur 2:
- eine transparente Darstellung des in
Figur 1 gezeigten Ausführungsbeispiels aus der Stuhl-Querrichtung, - Figur 3:
- eine perspektivische Darstellung eines Ausführungsbeispiels für die erfindungsgemäße Synchronmechanik in belastetem Zustand mit aufgerichtetem Rückenlehnenträger,
- Figur 4:
- eine transparente Darstellung des in
Figur 3 gezeigten Ausführungsbeispiels aus der Stuhl-Querrichtung, - Figur 5:
- eine perspektivische Darstellung eines Ausführungsbeispiels für die erfindungsgemäße Synchronmechanik in unbelastetem Zustand mit nach hinten gekipptem Rückenlehnenträger,
- Figur 6:
- eine transparente Darstellung des in
Figur 5 gezeigten Ausführungsbeispiels aus der Stuhl-Querrichtung, - Figur 7:
- eine perspektivische Darstellung eines Ausführungsbeispiels für die erfindungsgemäße Synchronmechanik in belastetem Zustand mit nach hinten gekipptem Rückenlehnenträger,
- Figur 8:
- eine transparente Darstellung des in
Figur 7 gezeigten Ausführungsbeispiels aus der Stuhl-Querrichtung, und - Figur 9:
- eine transparente Darstellung des in
Figur 1 gezeigten Ausführungsbeispiels von oben. -
Figur 1 zeigt ein Ausführungsbeispiel für die erfindungsgemäße Synchronmechanik 1 für einen nicht gezeigten Stuhl, insbesondere Bürostuhl, in unbelastetem Zustand. Die Synchronmechanik 1 weist eine Basiseinheit 2 auf, über die die Synchronmechanik 1 mit einer zentralen Stuhlsäule 3 verbunden ist. - Des Weiteren umfasst die Synchronmechanik 1 einen oberhalb und bewegbar an der Basiseinheit 2 angeordneten Sitzträger 4, der gemäß dem Ausführungsbeispiel zweiteilig ausgebildet ist und die Sitzträgerelemente 5 und 6 aufweist, die als rechtwinklig abgewinkelte Metallprofile ausgebildet sind. An dem oberen, sich im Wesentlichen horizontal erstreckenden Abschnitt 7 der Sitzträgerelemente 5 und 6 sind Bohrungen 8 angeordnet, über die ein nicht dargestellter Sitz mit dem Sitzträger 4 verbindbar, beispielsweise verschraubbar, ist.
- Die Synchronmechanik 1 weist zudem einen um eine horizontal und in Stuhl-Querrichtung ausgerichtete Schwenkachse S schwenkbar an der Basiseinheit 2 angeordneten Rückenlehnenträger 9 auf, der ein mit der Schwenkachse S unmittelbar verbundenes Verbindungsteil 10 und ein damit verbundenes Rückenteil 11 umfasst, wobei an dem Rückenteil 11 ebenfalls Bohrungen 12 ausgebildet sind, über die eine nicht dargestellte Rückenlehne mit dem Rückenlehnenträger 9 verbindbar ist.
- Ferner umfasst die Synchronmechanik 1 eine sich an der Unterseite des Sitzträgers 4 abstützenden Druckfederanordnung 13, die auf den Sitzträger 4 eine nach oben und auf den Rückenlehnenträger 9 eine nach vorne wirkende Vorbelastungskraft ausübt. Die Druckfederanordnung 13 weist eine Druckfeder 14, ein oberes Lagerelement 15 und ein in
Figur 2 gezeigtes unteres Lagerelement 16 auf. Über das obere Lagerelement 15 stützt sich die Druckfeder 14 an der Unterseite einer Querstange 17 des Sitzträgers 4 ab, welche endseitig in Langlöchern 18 an den in vertikaler Richtung ausgerichteten Abschnitten 19 beziehungsweise 20 der Sitzträgerelemente 5 beziehungsweise 6 ausgebildet sind. Die Langlöcher 19 und 20 sind derart ausgebildet, dass über sie wenigstens zwei verschiedene Vorbelastungskräfte einstellbar sind, was bei dem gezeigten Ausführungsbeispiel dadurch erfolgt, dass die Querstange 18 in Anschlag mit dem einen oder dem anderen Ende der Langlöcher gebracht wird. In der gezeigten Stellung der Querstange ist eine geringere Vorbelastungskraft eingestellt. Der Sitzträger 4 ist über eine die Bewegbarkeit des Sitzträgers 4 relativ zu der Basiseinheit 2 ermöglichende Kopplungsmechanik mit der Basiseinheit 2 verbunden, die im Folgenden näher erläutert wird. - Die Kopplungsmechanik weist eine im vorderen Bereich des Sitzträgers 4 angeordnete vordere Gelenkanordnung 21 und eine im hinteren Bereich des Sitzträgers 4 angeordnete hintere Gelenkanordnung 22 auf. Die vordere Gelenkanordnung 21 und die hintere Gelenkanordnung 22 sind mechanisch derart aneinander gekoppelt, dass eine Bewegung der vorderen Gelenkanordnung 21 eine Bewegung der hinteren Gelenkanordnung 22 und umgekehrt bewirkt, was aus dem Folgenden deutlich wird. Hierdurch wird verhindert, dass der Sitzträger 4 um eine in Stuhl-Querrichtung ausgerichtete, nicht näher bezeichnete Achse kippt.
- Jede Gelenkanordnung 21 beziehungsweise 22 weist zwei Gelenkeinheiten 23 und 24 beziehungsweise 25 und 26 auf, die bezüglich der Stuhl-Querrichtung beabstandet voneinander angeordnet und mechanisch derart aneinandergekoppelt sind, dass eine Bewegung der einen Gelenkeinheit 23 beziehungsweise 25 eine Bewegung der anderen Gelenkeinheit 24 beziehungsweise 26 bewirkt. Durch diese mechanische Kopplung wird verhindert, dass der Sitzträger 4 bei asymmetrischer Gewichtsbelastung um eine in Stuhl-Längsrichtung ausgerichtete, nicht näher bezeichnete Achse kippt.
- Die Ausgestaltung der vorderen Gelenkeinheiten 23 und 24 wird zur Wahrung der Übersichtlichkeit der Figuren lediglich anhand der vorderen Gelenkeinheit 24 beschrieben. Die vordere Gelenkeinheit 24 weist zwei einendig über eine freie erste Achse A1 gelenkig miteinander verbundene Elemente 27 und 28 auf. Das obere Element 27 ist anderendig über eine zweite Achse A2 gelenkig mit der Basiseinheit 2 und dem Sitzträger 4 und das untere Element 28 anderendig über eine dritte Achse A3 gelenkig mit der Basiseinheit 2 verbunden. Die freie erste Achse A1, die zweite Achse A2 und die dritte Achse A3 sind parallel zu und beabstandet von der Schwenkachse S angeordnet. Die zweite Achse A2 ist in vertikaler Richtung endseitig in Langlöchern 29 an der Basiseinheit 2 geführt, wodurch die Bewegbarkeit des Sitzträgers 4 in vertikaler Richtung relativ zu der Basiseinheit 2 begrenzt wird. Des Weiteren ist die zweite Achse A2 in horizontalen Langlöchern 30 an den vertikal ausgerichteten Abschnitten 19 und 20 der Sitzträgerelemente 5 und 6 geführt, deren Funktion aus den
Figuren 5 bis 8 deutlich wird. Die freie erste Achse A1 ist vor der zweiten Achse A2 und der dritten Achse A3 angeordnet. Die freie erste Achse A1, die zweite Achse A2 und die dritte Achse A3 der einen vorderen Gelenkeinheit 23 bilden die freie erste Achse A1, die zweite Achse A2 und die dritte Achse A3 der anderen vorderen Gelenkeinheit 24. An der freien ersten Achse A1 greifen zwei Zugfedern 31 und 32 an, die mit ihren anderen Enden mit einer Querstange 33 zusammenwirken, die an dem Verbindungsteil 10 des Rückenlehnenträgers 9 festgelegt ist. Mittels der Zugfedern 31 und 32 wird die erste freie Achse A1 derart mit Kraft beaufschlagt, dass die vorderen Gelenkeinheiten 23 und 24 bestrebt sind, sich aufzurichten. - Jede hintere Gelenkeinheit 25 beziehungsweise 26 weist zwei einendig über eine freie vierte Achse A4 gelenkig miteinander verbundene Elemente 34 und 35 auf, was deutlicher aus
Figur 2 wird. Das obere Element 34 ist anderendig über eine fünfte Achse A5 und das untere Element 35 anderendig über eine sechste Achse A6 gelenkig mit der Basiseinheit 2 verbunden. Die freie vierte Achse A4, die fünfte Achse A5 und die sechste Achse A6 sind parallel zu und beabstandet von der Schwenkachse S angeordnet. Die sechste Achse A6 ist in vertikaler Richtung endseitig in Langlöchern an der Basiseinheit 2 geführt. Die freie vierte Achse A4 ist hinter der fünften Achse A5 und der sechsten Achse A6 angeordnet. Die freie vierte Achse A4, die fünfte Achse A5 und die sechste Achse A6 der einen hinteren Gelenkeinheit 25 beziehungsweise 26 bilden die freie vierte Achse A4, die fünfte Achse A5 und die sechste Achse A6 der anderen hinteren Gelenkeinheit 26 beziehungsweise 25. - Jede hintere Gelenkeinheit 25 beziehungsweise 26 weist ferner ein Kopplungselement 37 beziehungsweise 38 auf, von denen in
Figur 1 nur das Kopplungselement 37 zu sehen ist. Jedes Kopplungselement 37 beziehungsweise 38 ist einendig über eine siebte Achse A7 gelenkig mit dem Sitzträger 4 und anderendig über die sechste Achse A6 gelenkig mit der Basiseinheit 2 verbunden ist. Die siebte Achse A7 der einen hinteren Gelenkeinheit 25 beziehungsweise 26 bildet die siebte Achse A7 der anderen hinteren Gelenkeinheit 26 beziehungsweise 25. Die siebte Achse A7 ist über zwei Schwingen 41 mit der Querstange 33 verbunden. Die Kopplungselemente 37 und 38 sind somit über die sechste Achse A6 mit den hinteren Elementen 34 und 35 verbunden. Über die Kopplungselemente 37 und 38 wirken Bewegungen des Sitzträgers 4 auf die hinteren Gelenkeinheiten 25 und 26 ein. - Zur mechanischen Kopplung der vorderen Gelenkanordnung 21 an die hintere Gelenkanordnung 22 ist die freie erste Achse A1 über zwei starr ausgebildete Steuerelemente 39 und 40 mit der freien vierten Achse A4 verbunden.
- Im Folgenden wird die Wirkungsweise des oben beschriebenen Kopplungsmechanismus und damit der Synchronmechanik 1 in einer Zusammenschau der
Figuren 1 bis 4 erläutert: - Wie die
Figuren 1 und2 zeigen, befindet sich die zweite Achse A2 im unbelasteten Zustand der Synchronmechanik 1 am oberen Anschlag der Langlöcher 29 an der Basiseinheit 2. Auch die sechste Achse A6 befindet sich am oberen Anschlag der in der Basiseinheit 2 ausgebildeten Langlöcher 36. Der Sitzträger 4 ist mittels der Druckfederanordnung 13 mit einer nach oben wirkenden Vorbelastungskraft beaufschlagt. Hierzu stützt sich die Druckfeder 14 über das untere Lagerelement 16 an einem an dem Verbindungsteil 10 des Rückenlehnenträgers 9 befestigten Widerlagerelement 42 ab. - Wird der Sitzträger 4 mit einem Gewicht belastet, was in den
Figuren 3 und4 angedeutet sein soll, wird die Druckfeder 14 der Druckfederanordnung 13 gestaucht. Gleichzeitig werden die zweite Achse A2 und die sechste Achse A6 in den jeweiligen Langlöchern 29 beziehungsweise 36 nach unter verlagert. Diese Bewegungen sind mittels der Steuerelemente 39 und 40 mechanisch aneinandergekoppelt. Wird beispielsweise die vordere Gelenkeinheit 24 durch Gewichtsbelastung des Sitzträgers 4 betätigt, bewegt sich die erste freie Achse A1 in denFiguren 2 und4 nach links. Hierdurch wird über die Steuerelemente 39 und 40 die freie vierte Achse A4 ebenfalls nach links bewegt, was wiederum eine Bewegung der sechsten Achse A6 in den Langlöchern 36 nach unten bewirkt. Hierbei werden die Kopplungselemente 37 und 38 mitgenommen, welche wiederum den Sitzträger 4 mitnehmen und dadurch eine Verlagerung des rechts in denFiguren 2 und4 gezeigten, hinteren Teils des Sitzträgers 4 bewirken, so dass eine parallele Verlagerung des gesamten Sitzträgers 4 relativ zur Basiseinheit 2 erfolgt. In mechanischer Umkehr erfolgt bei einer Betätigung der hinteren Gelenkeinheiten 25 und 26 gleichsam eine Betätigung der vorderen Gelenkeinheiten 23 und 24, um eine ausschließlich parallele Verlagerung des gesamten Sitzträgers 4 zu bewirken. - Die
Figuren 5 bis 8 zeigen das in denFiguren 1 bis 4 gezeigte Ausführungsbeispiel für die Synchronmechanik 1 mit nach hinten verschwenktem Rückenlehnenträger 9. In diesem Zustand der Synchronmechanik 1 befindet sich die zweite Achse A2 am vorderen Anschlag der Langlöcher 30 in den vertikalen Abschnitten 19 und 20 der Sitzträgerelemente 5 beziehungsweise 6. Gleichzeitig sind die Zugfedern 31 und 32 gestreckt. Der Betätigungsmechanismus der vorderen Gelenkeinheiten 23 und 24 und der hinteren Gelenkeinheiten 25 und 26 entspricht dem oben mit Bezug auf dieFiguren 1 bis 4 beschriebenen. -
Figur 9 zeigt das in denFiguren 1 bis 4 gezeigte Ausführungsbeispiel für die erfindungsgemäße Synchronmechanik 1 in einer transparenten Darstellung von oben und verdeutlicht noch einmal die räumliche Anordnung der Bestandteile der Synchronmechanik 1 zueinander. - Das anhand der Figuren beschriebene Ausführungsbeispiel dient der Erläuterung und ist nicht beschränkend. Insbesondere können die Zugfedern 31 und 32 derart ausgelegt sein, dass sie die gleiche Funktion wie die Druckfederanordnung 13 übernehmen oder diese gar ersetzen.
-
Zeichen Bezeichnung 1 Synchronmechanik 2 Basiseinheit 3 Stuhlsäule 4 Sitzträger 5 Sitzträgerelement 6 Sitzträgerelement 7 horizontaler Abschnitt 8 Bohrung 9 Rückenlehnenträger 10 Verbindungsteil 11 Rückenteil 12 Bohrung 13 Druckfederanordnung 14 Druckfeder 15 oberes Lagerelement 16 unteres Lagerelement 17 Querstange 18 Langloch 19 vertikaler Abschnitt 20 vertikaler Abschnitt 21 vordere Gelenkanordnung 22 hintere Gelenkanordnung 23 vordere Gelenkeinheit 24 vordere Gelenkeinheit 25 hintere Gelenkeinheit 26 hintere Gelenkeinheit 27 oberes Element 28 unteres Element 29 Langloch 30 Langloch 31 Zugfeder 32 Zugfeder 33 Querstange 34 oberes Element 35 unteres Element 36 Langloch 37 Kopplungselement 38 Kopplungselement 39 Steuerelement 40 Steuerelement 41 Schwinge 42 Wiederlagerelement A1 erste Achse A2 zweite Achse A3 dritte Achse A4 vierte Achse A5 fünfte Achse A6 sechste Achse A7 siebte Achse S Schwenkachse
Claims (11)
- Synchronmechanik (1) für einen Stuhl, insbesondere für einen Bürostuhl, mit einer Basiseinheit (2), einem oberhalb und bewegbar an der Basiseinheit (2) angeordneten Sitzträger (4), einem um eine horizontal und in Stuhl-Querrichtung ausgerichtete Schwenkachse (S) schwenkbar an der Basiseinheit (2) angeordneten Rückenlehnenträger (9) und einer Vorbelastungseinrichtung, wobei die Vorbelastungseinrichtung auf den Sitzträger (4) eine nach oben und auf den Rückenlehnenträger (9) eine nach vorne wirkende Vorbelastungskraft ausübt und wobei der Sitzträger (4) über eine die Bewegbarkeit des Sitzträgers (4) relativ zu der Basiseinheit (2) ermöglichende Kopplungsmechanik mit der Basiseinheit (2) verbunden ist, wobei
die Kopplungsmechanik derart ausgebildet ist, dass sie die Bewegungen des Sitzträgers (4) relativ zu der Basiseinheit (2) derart zwangssteuert, dass der Sitzträger (4) bei festgelegtem Rückenlehnenträger (9) allein zwischen Stellungen hin und her bewegbar ist, dadurch gekennzeichnet, dass die Stellungen zueinander parallel sind. - Synchronmechanik nach Anspruch 1, dadurch gekennzeichnet, dass die Kopplungsmechanik eine im vorderen Bereich des Sitzträgers (4) angeordnete vordere Gelenkanordnung (21) und eine im hinteren Bereich desselben angeordnete hintere Gelenkanordnung (22) aufweist, wobei die vordere Gelenkanordnung (21) und die hintere Gelenkanordnung (22) mechanisch derart aneinandergekoppelt sind, dass eine Bewegung der vorderen Gelenkanordnung (21) eine Bewegung der hinteren Gelenkanordnung (22) und umgekehrt bewirkt.
- Synchronmechanik nach Anspruch 2, dadurch gekennzeichnet, dass jede Gelenkanordnung (21, 22) zwei Gelenkeinheiten (23, 24, 25, 26) aufweist, die bezüglich der Stuhl-Querrichtung beabstandet voneinander angeordnet und mechanisch derart aneinander gekoppelt sind, dass eine Bewegung der einen Gelenkeinheit (23, 25) eine Bewegung der anderen Gelenkeinheit (24, 26) bewirkt.
- Synchronmechanik nach Anspruch 3, dadurch gekennzeichnet, dass jede vordere Gelenkeinheit (23, 24) zwei einendig über eine freie erste Achse (A1) gelenkig miteinander verbundene Elemente (27, 28) aufweist, von denen das obere Element (27) anderendig über eine zweite Achse (A2) gelenkig mit der Basiseinheit (2) und dem Sitzträger (4) und das untere Element (28) anderendig über eine dritte Achse (A3) gelenkig mit der Basiseinheit (2) verbunden ist, wobei die freie erste Achse (A1), die zweite Achse (A2) und die dritte Achse (A3) parallel zu und beabstandet von der Schwenkachse (S) angeordnet sind, wobei die zweite Achse (A2) in vertikaler Richtung endseitig in Langlöchern (29) an der Basiseinheit (2) geführt ist, wobei die freie erste Achse (A1) vor der zweiten Achse (A2) und der dritten Achse (A3) angeordnet ist und wobei die freie erste Achse (A1), die zweite Achse (A2) und die dritte Achse (A3) der einen vorderen Gelenkeinheit (23, 24) die freie erste Achse (A1), die zweite Achse (A2) und die dritte Achse (A3) der anderen vorderen Gelenkeinheit (23, 24) bilden.
- Synchronmechanik nach Anspruch 3 oder 4, dadurch gekennzeichnet, dass jede hintere Gelenkeinheit (25, 26) zwei einendig über eine freie vierte Achse (A4) gelenkig miteinander verbundene Elemente (34, 35) aufweist, von denen das obere Element (34) anderendig über eine fünfte Achse (A5) und das untere Element (35) anderendig über eine sechste Achse (A6) gelenkig mit der Basiseinheit (2) verbunden ist, wobei die freie vierte Achse (A4), die fünfte Achse (A5) und die sechste Achse (A6) parallel zu und beabstandet von der Schwenkachse (S) angeordnet sind, wobei die sechste Achse (A6) in vertikaler Richtung endseitig in Langlöchern (36) an der Basiseinheit (2) geführt ist, wobei die freie vierte Achse (A4) hinter der fünften Achse (A5) und der sechsten Achse (A6) angeordnet ist, und wobei die freie vierte Achse (A4), die fünfte Achse (A5) und die sechste Achse (A6) der einen hinteren Gelenkeinheit (25) die freie vierte Achse (A4), die fünfte Achse (A5) und die sechste Achse (A6) der anderen hinteren Gelenkeinheit (25, 26) bilden.
- Synchronmechanik nach Anspruch 5, dadurch gekennzeichnet, dass jede hintere Gelenkeinheit (25, 26) ein Kopplungselement (37, 38) aufweist, das einendig über eine siebte Achse (A7) gelenkig mit dem Sitzträger (4) und anderendig über die sechste Achse (A6) gelenkig mit der Basiseinheit (2) verbunden ist, wobei die siebte Achse (A7) der einen hinteren Gelenkeinheit (25, 26) die siebte Achse (A7) der anderen hinteren Gelenkeinheit (25, 26) bildet.
- Synchronmechanik nach Anspruch 5 oder 6, dadurch gekennzeichnet, dass die freie erste Achse (A1) über wenigstens ein starr ausgebildetes Steuerelement (41) mit der freien vierten Achse (A4) verbunden ist.
- Synchronmechanik (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Stärke der durch die Vorbelastungseinrichtung ausgeübten Vorbelastungskraft einstellbar ist.
- Synchronmechanik nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Vorbelastungseinrichtung wenigstens eine sich an der Unterseite des Sitzträgers (4) und an der Oberseite eines sich nach vorne über die Schwenkachse (S) hinaus erstreckenden Abschnitts des Rückenlehnenträgers (9) abstützende Druckfederanordnung (13) aufweist.
- Synchronmechanik nach einem der Ansprüche 4 bis 9, dadurch gekennzeichnet, dass die Vorbelastungseinrichtung wenigstens eine Zugfeder (31, 32) umfasst, die mit einem Ende an der freien ersten Achse (A1) und mit dem anderen Ende an dem Rückenlehnenträger (9) angreift, derart, dass sie die freie erste Achse (A1) in Richtung der hinteren Gelenkanordnung (22) und den Rückenlehnenträger nach vorne drängt.
- Stuhl, insbesondere Bürostuhl,
gekennzeichnet durch
eine Synchronmechanik (1) nach einem der vorhergehenden Ansprüche.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL12180206T PL2561777T3 (pl) | 2011-08-25 | 2012-08-13 | Mechanizm synchroniczny dla krzesła |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102011081588A DE102011081588A1 (de) | 2011-08-25 | 2011-08-25 | Synchronmechanik für einen Stuhl |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2561777A1 EP2561777A1 (de) | 2013-02-27 |
| EP2561777B1 true EP2561777B1 (de) | 2014-07-16 |
Family
ID=46934398
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12180206.0A Not-in-force EP2561777B1 (de) | 2011-08-25 | 2012-08-13 | Synchronmechanik für einen Stuhl |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8931841B2 (de) |
| EP (1) | EP2561777B1 (de) |
| DE (1) | DE102011081588A1 (de) |
| DK (1) | DK2561777T3 (de) |
| ES (1) | ES2515040T3 (de) |
| PL (1) | PL2561777T3 (de) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102014226645B4 (de) * | 2014-12-19 | 2023-10-05 | Hangzhou Zhongtai Industrial Group Co., Ltd. | Verstellmechanik zur Einstellung einer auf eine Rückenlehne eines Stuhls einwirkenden Rückstellkraft und Bürostuhl mit einer solchen Verstellmechanik |
| US10463153B2 (en) * | 2016-06-09 | 2019-11-05 | Steelcase Inc. | Seating arrangement |
| DE202016103309U1 (de) | 2016-06-22 | 2016-07-08 | Hong Kong Tiansheng International Group Limited | Einstellbare Drehstuhlgrundbasis mit einem Schwingbereich nach vorne und hinten |
| CN108371436B (zh) * | 2018-04-25 | 2023-10-27 | 严澄宇 | 弹力跷跷板式的自由倾仰机构及自由调节转椅 |
| US11197548B2 (en) * | 2019-12-16 | 2021-12-14 | Allseating Corporation | Reclining control system for a chair |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH636252A5 (de) * | 1978-10-20 | 1983-05-31 | Syntech Sa | Ergonomischer stuhl. |
| DE3537203A1 (de) * | 1984-10-24 | 1986-04-24 | Klöber GmbH & Co, 7770 Überlingen | Arbeitsstuhl mit neigungsmechanik von sitzschale und rueckenlehne |
| DE3617624A1 (de) * | 1986-05-26 | 1987-12-03 | Drabert Soehne | Stuhl |
| JPH0520199Y2 (de) * | 1988-11-30 | 1993-05-26 | ||
| US5035466A (en) * | 1989-04-03 | 1991-07-30 | Krueger International, Inc. | Ergonomic chair |
| DE3930983C2 (de) * | 1989-09-16 | 1993-09-30 | Rolf Voelkle | Sitzmöbel mit neigungsverstellbarer Sitzfläche |
| US5556163A (en) * | 1994-08-17 | 1996-09-17 | Eac Corporation | Automatically adjustable office and task chairs |
| US5782536A (en) * | 1995-02-17 | 1998-07-21 | Steelcase Inc. | Modular chair construction and method of assembly |
| US6027168A (en) * | 1998-06-05 | 2000-02-22 | Leggett & Platt, Inc. | Chair seat horizontal adjustment mechanism |
| DE19921153A1 (de) * | 1999-05-07 | 2000-11-09 | Bock 1 Gmbh & Co | Synchronmechanik für eine korrelierte Sitz-Rückenlehnen-Bewegung eines Bürostuhles |
| DE19931099C2 (de) | 1999-07-06 | 2001-08-09 | Roeder Peter | Stuhl mit selbständiger Anpassung der Vorbelastungskraft der Rückenlehne |
| WO2002032262A1 (fr) * | 2000-10-16 | 2002-04-25 | Kokuyo Co., Ltd. | Chaise |
| DE10219478B4 (de) * | 2002-04-30 | 2006-07-13 | Klöber GmbH | Stuhl mit vom Benutzergewicht abhängigen Kraftspeicher |
| US7159942B2 (en) * | 2004-08-26 | 2007-01-09 | L & P Property Management Company | Seat slide adjustment mechanism |
| DE102007059986A1 (de) * | 2007-12-11 | 2009-06-18 | Sedus Stoll Ag | Bürostuhl |
-
2011
- 2011-08-25 DE DE102011081588A patent/DE102011081588A1/de not_active Withdrawn
-
2012
- 2012-08-13 PL PL12180206T patent/PL2561777T3/pl unknown
- 2012-08-13 DK DK12180206.0T patent/DK2561777T3/da active
- 2012-08-13 EP EP12180206.0A patent/EP2561777B1/de not_active Not-in-force
- 2012-08-13 ES ES12180206.0T patent/ES2515040T3/es active Active
- 2012-08-23 US US13/592,653 patent/US8931841B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE102011081588A1 (de) | 2013-02-28 |
| US8931841B2 (en) | 2015-01-13 |
| DK2561777T3 (da) | 2014-10-20 |
| EP2561777A1 (de) | 2013-02-27 |
| ES2515040T3 (es) | 2014-10-29 |
| US20130221718A1 (en) | 2013-08-29 |
| PL2561777T3 (pl) | 2014-12-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1971245B1 (de) | Permanentkontaktmechanik | |
| DE102012107778A1 (de) | Stuhl, insbesondere Bürostuhl | |
| EP2561777B1 (de) | Synchronmechanik für einen Stuhl | |
| DE102005029906B3 (de) | Synchronmechanik | |
| AT12867U1 (de) | Sitzmöbel | |
| DE102011113789B4 (de) | Fahrzeugsitz, insbesondere Kraftfahrzeugsitz | |
| EP2893843B1 (de) | Sitzmöbel mit motorisch verschwenkbarem Kopfteil | |
| EP2884871B1 (de) | Beschlag für ein sitzmöbelstück | |
| EP3045078B1 (de) | Sitzmöbel | |
| EP0233974A1 (de) | Neigungsvorrichtung für Sitzmöbel | |
| DE202005004932U1 (de) | Bewegungsbeschlag | |
| EP2477523B1 (de) | Wippmechanik für einen bürostuhl | |
| EP3528664B1 (de) | Synchronstuhlmechanik und stuhl mit einer solchen | |
| EP2544568B1 (de) | Möbelstück und beschlag für ein möbelstück | |
| DE202015101963U1 (de) | Lattenrost | |
| DE102015102950A1 (de) | Sitzmöbel | |
| WO2014183851A1 (de) | Synchronmechanik | |
| DE102015106048B4 (de) | Lattenrost | |
| EP2850975B1 (de) | Lehnenbeschlag | |
| DE2416953C2 (de) | Sitzmöbel | |
| DE202012102557U1 (de) | Sitzmöbel | |
| EP2614752B1 (de) | Polstermöbel | |
| DE102008028623A1 (de) | Sitzmöbel | |
| WO2009132829A1 (de) | Möbelstück | |
| EP3430948A1 (de) | Verwandlungsmöbel |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20130823 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20140211 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 677010 Country of ref document: AT Kind code of ref document: T Effective date: 20140815 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502012001009 Country of ref document: DE Effective date: 20140828 |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 Effective date: 20141015 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2515040 Country of ref document: ES Kind code of ref document: T3 Effective date: 20141029 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: T3 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: PL Ref legal event code: T3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141016 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141117 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141017 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141016 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141116 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502012001009 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140831 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20150417 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140813 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20150809 Year of fee payment: 4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DK Payment date: 20150811 Year of fee payment: 4 Ref country code: CH Payment date: 20150811 Year of fee payment: 4 Ref country code: ES Payment date: 20150810 Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20150811 Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20120813 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140813 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: EBP Effective date: 20160831 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MM Effective date: 20160901 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20160813 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160831 Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160814 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160901 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160813 Ref country code: DK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160814 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20180625 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140716 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20180727 Year of fee payment: 7 Ref country code: AT Payment date: 20180725 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20190815 Year of fee payment: 8 Ref country code: IT Payment date: 20190821 Year of fee payment: 8 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 677010 Country of ref document: AT Kind code of ref document: T Effective date: 20190813 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190813 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200813 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200831 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20211025 Year of fee payment: 10 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190813 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502012001009 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230301 |