CN108780214B - 光学系统以及具有该光学系统的成像装置和投影装置 - Google Patents
光学系统以及具有该光学系统的成像装置和投影装置 Download PDFInfo
- Publication number
- CN108780214B CN108780214B CN201780015021.2A CN201780015021A CN108780214B CN 108780214 B CN108780214 B CN 108780214B CN 201780015021 A CN201780015021 A CN 201780015021A CN 108780214 B CN108780214 B CN 108780214B
- Authority
- CN
- China
- Prior art keywords
- optical system
- optical
- conditional expression
- aperture stop
- curvature
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/08—Catadioptric systems
- G02B17/0856—Catadioptric systems comprising a refractive element with a reflective surface, the reflection taking place inside the element, e.g. Mangin mirrors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/001—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras
- G02B13/0055—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras employing a special optical element
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/001—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras
- G02B13/0055—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras employing a special optical element
- G02B13/006—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras employing a special optical element at least one element being a compound optical element, e.g. cemented elements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/001—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras
- G02B13/0055—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras employing a special optical element
- G02B13/0065—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras employing a special optical element having a beam-folding prism or mirror
- G02B13/007—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras employing a special optical element having a beam-folding prism or mirror the beam folding prism having at least one curved surface
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/08—Catadioptric systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/188—Capturing isolated or intermittent images triggered by the occurrence of a predetermined event, e.g. an object reaching a predetermined position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/02—Active or adaptive cruise control system; Distance control
- B60T2201/022—Collision avoidance systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/18—Optical objectives specially designed for the purposes specified below with lenses having one or more non-spherical faces, e.g. for reducing geometrical aberration
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Human Computer Interaction (AREA)
- Lenses (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Measurement Of Optical Distance (AREA)
- Studio Devices (AREA)
Abstract
光学系统10从放大侧起依次包括前组1、孔径光阑3和后组2,其中前组1包括朝放大侧凸起的折射表面11a,后组2包括凹反射表面12b,并且满足条件表达式0.7≤|Rl|/Ll≤1.5和2≤|Rm|/Lm≤7,其中折射表面11a的曲率半径是Rl(mm),折射表面11a和孔径光阑3之间的距离是Ll(mm),反射表面12b的曲率半径是Rm(mm),并且孔径光阑3和反射表面12b之间的距离是Lm(mm)。
Description
技术领域
本发明涉及具有折射表面和反射表面的光学系统,该光学系统例如有利地用在诸如数字静物相机和数字视频相机、用于蜂窝电话的相机、监视相机、可穿戴相机、医疗相机等的成像装置中,以及诸如投影仪等的投影装置中。
背景技术
近年来,需要一种用在成像装置和投影装置中在宽视场角上具有高分辨率并且尺寸小的光学系统。
PTL 1描述了一种具有球面透镜的成像装置。根据该球面透镜,可以有利地校正诸如球面像差和轴向色差之类的轴上像差,同时抑制诸如彗形像差、像散、横向色差等的轴外像差的发生,并且因此可以实现在宽视场角上具有高分辨率的光学系统。
PTL 2描述了一种具有带有朝向物侧的凸表面的透镜和具有凹的内反射表面的折反射透镜的光学系统,由此可以实现宽视场角。
引文列表
专利文献
PTL 1:日本专利公开号2013-210549
PTL 2:日本专利公开号2009-300994
发明内容
技术问题
但是,根据PTL 1的球面透镜的成像平面是球面的,因此,在将该球面透镜提供给成像装置或投影装置的情况下,其中一端是球面并且另一端是平面的球面成像设备或显示设备或光导部件变得是必须的。因此,整个装置的复杂性和尺寸增加,从而导致更高的成本。
而且,用根据PTL 2的光学系统难以在保持f值低的同时有利地校正像差,并且因此难以实现尺寸的减小和高分辨率两者。
因此,本发明的目的是提供一种光学系统,该光学系统能够在成像装置和投影装置中实现尺寸的减小和在宽视场角上的高分辨率。
问题的解决方案
为了实现上述目的,根据本发明的方面的光学系统从放大侧起依次包括前组、孔径光阑和后组。前组包括朝放大侧凸起的折射表面,后组包括凹反射表面,并且满足0.7≤|Rl|/Ll≤1.5和2≤|Rm|/Lm≤7的条件表达式,其中折射表面的曲率半径是Rl(mm),折射表面和孔径光阑之间的距离是Ll(mm),反射表面的曲率半径是Rm(mm),并且孔径光阑和反射表面之间的距离是Lm(mm)。
附图说明
图1是根据本发明的第一示例的光学系统的主要部分的示意图。
图2是根据第一示例的光学系统的纵向像差图。
图3是用于描述具有点对称形状的折射表面的行为的图。
图4是用于描述条件表达式(1)的效果的图。
图5是用于描述凹形反射表面的行为的图。
图6是图示反射表面和像场弯曲之间的关系的图。
图7是用于描述条件表达式(2)的效果的图。
图8是图示根据第一示例的前组、后组和整个系统的像场弯曲的图。
图9是根据本发明的第二示例的成像装置的主要部分的示意图。
图10是根据第二示例的光学系统的主要部分的示意图。
图11是图示成像平面上的视场角的图。
图12是根据第二示例的光学系统的像差图。
图13是根据本发明的第三示例的光学系统的主要部分的示意图。
图14是根据第三示例的光学系统的像差图。
图15是根据本发明的第四示例的光学系统的主要部分的示意图。
图16是根据第四示例的光学系统的像差图。
图17是根据本发明的第五示例的光学系统的主要部分的示意图。
图18是图示根据第五示例的反射表面的构造的图。
图19是根据第五示例的光学系统的像差图。
图20是根据本发明的实施例的车载相机系统的功能框图。
图21是根据本发明的实施例的车辆的主要部分的示意图。
图22是图示根据实施例的车载相机系统的操作示例的流程图。
具体实施方式
下面将参考附图描述本发明的优选实施例。为了方便起见,可能根据与实际比例不同的比例绘制附图。附图中相同的部分用相同的标号表示,并且将省略冗余的描述。
[第一示例]
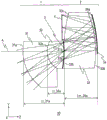
图1是根据本发明的第一示例的在包括光轴A的YZ横截面中的光学系统10的主要部分的示意图。根据本示例的光学系统10是成像光学系统,其收集来自图中省略的物体的光通量,并形成物体的图像。光学系统10可以应用于成像装置和投影装置。
在其中光学系统10应用于作为成像光学系统的成像装置的情况下,诸如CCD传感器、CMOS传感器等的成像设备的成像表面设置在光学系统10的像面(缩小平面)4的位置处。在其中光学系统10应用于作为投影光学系统的投影装置的情况下,诸如液晶面板(空间调制器)等的显示设备的显示表面设置在缩小平面4的位置处。但是,注意的是,物侧和像侧在成像光学系统和投影光学系统之间是相对的,并且光路是相反的。在以下描述中假设其中光学系统10应用于成像装置的情况。
(关于光学系统10的构造)
光学系统10被构造为包括:限制光通量的宽度的孔径光阑3,作为比孔径光阑3更靠近物侧(放大侧)设置的光学元件组的前组1,以及作为比孔径光阑3更靠近像侧(缩小侧)设置的光学元件组的后组2。在本示例中,前组1由光学元件11构成,光学元件11包括朝物侧凸起的折射表面11a,并且后组2由光学元件12构成,光学元件12包括朝入射光凹入的反射表面12b。
第一光学元件11是具有有助于成像的有效光通量穿过的两个光学表面的平凸透镜。用作最靠近第一光学元件11的物侧的光学平面(入射平面)的第一表面11a是朝物侧凸起的球面表面,以及用作最靠近像侧的光学平面(发射平面)的第二表面11b是平坦表面。注意的是,其中有效光通量不通过的第一光学元件11的不必要部分被切除,如图1所示,以便将成像设备或显示设备设置在像面4的位置处。
第二光学元件12是具有三个光学表面的折反射透镜。用作入射表面的第二光学元件12的第一表面12a是平坦表面,第二表面12b具有朝像侧凹入的非球面表面,并且用作发射平面的第三表面12c是平坦表面。第一光学元件11和第二光学元件12均由折射率为Nd=1.51608且阿贝(Abbe)数为vd=64.1的材料制成,并通过相互接合而整合。孔径光阑3设置在第一光学元件11和第二光学元件12的接合表面上。
表1图示了根据本示例的光学系统10的规格值。注意的是,在表1中,第一光学元件11的第二表面11b、第二光学元件12的第一表面12a、和孔径光阑3被表示为处于相同的表面。还要注意的是,表1中的“最前表面”指示“最靠近物侧的光学表面”。
[表1]

来自物体的光通量(图中省略)透射过第一光学元件11的第一表面11a和第二表面11b,并穿过孔径光阑3的开口。此时,光通量的一部分被孔径光阑3的屏蔽部分屏蔽,因此限制了光通量宽度。已穿过孔径光阑3的光通量透射过第二光学元件12的第一表面12a,在第二表面12b处反射、并透射过第三表面12c,并形成平面像面4。如图1所示,像面4相对于本示例中的反射表面12b在与孔径光阑3相同的一侧(-Z侧)形成。
关于根据本示例的光学系统10,ZX横截面(第一横截面)内的视场角(水平视场角)是θx=30°(θx=-15°到+15°),并且YZ横截面(第二横截面)内的视场角(垂直视场角)是θy=20°(θy=+15°至+35°)。即,虽然水平视场角在光轴A的两侧对称设置,但垂直视场角仅在光轴A的一侧(+侧)设置。
因此,可以进行这样的构造:其中,通过布置使光通量在YZ横截面中倾斜地进入光学系统10的每个光学表面,布置在像面4处的成像设备的成像表面仅接收相对于光轴A从成像设备的相对侧进入光学系统10的光通量。在投影装置中,可以进行这样的构造:其中来自设置在像面4处的显示设备的显示表面的光通量仅从相对于光学系统10的YZ横截面中的光轴A的显示设备的相对侧离开。这使得能够防止成像设备或显示设备干扰光学元件和光路。
此外,根据本示例的光学系统10的光圈值(f值)是F=2.0,因此根据本示例的光学系统10是具有宽视场角并且f值小(亮)的光学系统。如图2所示,光学系统10的像差也得到很好的校正。具体地,光学系统10通过折射表面11a在宽视场角上获得高成像性能,并且通过反射表面12b校正由于折射表面11a引起的成像表面的曲率。这将在下面进行详细描述。
(关于前组1)
根据本示例的前组1的折射表面11a具有其中到孔径光阑3的距离和曲率半径大致相等的形状(点对称形状)。具体地,当折射表面11a的曲率半径是Rl(mm)并且折射表面11a和孔径光阑3之间的距离是Ll(mm)时,折射表面11a的形状满足以下条件表达式(1)。
0.7≤|Rl|/Ll≤1.5 (1)
注意的是,除非另外特别指示,否则“距离”指示“光轴A上的距离”。光轴A是穿过光学系统10中具有焦度的光学表面的中心(表面顶点)和孔径光阑3的中心的轴。偏离条件表达式(1)中的范围导致发生轴外像差量的增加,并且不能获得良好的光学属性。这将在下面描述。
通常,在设计光学系统时,需要校正诸如彗形像差、像散、像场弯曲、畸变和横向色差等的轴外像差,以及诸如球面像差和轴向色差等的轴上像差。但是,在使用一般轴对称形状的透镜的情况下,在边缘场(轴外)处发生大量的轴外像差,因此光学性能在光轴上最高,并且相比之下,边缘视场处的光学性能劣化。
另一方面,点对称透镜表面从光轴到边缘场具有大致相同的形状,因此可以抑制诸如彗形像差、像散、横向色差等的轴外像差的发生,并且可以抑制边缘场处的光学性能的劣化。因此,通过采用点对称透镜表面可以限制要校正的像差的数量,并且因此即使在简单的构造下也可以很好地校正轴上像差。因此,可以在减小光圈值的同时实现尺寸小并且在宽视场角上具有高分辨率的光学系统。
图3是用于描述点对称形状的折射表面的行为的图,图示了其中穿过透镜6a和6b的光通量经由孔径光阑3收集的方式。透镜6a和6b分别包括透镜表面5a和5b,其具有曲率半径Rl=10.0000mm,这与根据本示例的折射表面11a相同。透镜6a和6b的折射率,以及从孔径光阑3更靠近像侧的介质7a和7b的折射率是Nd=1.51608,这与根据本示例的第一光学元件11和第二光学元件12的折射率相同。注意的是,图3仅图示了视场角0°和+30°处的光通量。
在图3(a)中,穿过透镜表面5a的光通量经由孔径光阑3和介质7a收集,并形成其曲率半径为20.000mm的成像表面8a。透镜表面5a和孔径光阑3之间的距离是Ll=10.000mm,这与根据本示例的光学系统10相同,因此条件表达式(1)由于|Rl|/Ll=1.00mm而满足。这里从附图中可以清楚地看出,关于成像表面8a的球面表面的偏移和像散是零,并且彗形像差也几乎为零。
另一方面,在图3(b)中,与根据本示例的光学系统10不同,透镜表面5b与孔径光阑3之间的距离是Ll=15.000mm,因此由于|Rl|/Ll=0.67,所以条件表达式(1)不满足。这里,从附图中可以清楚地看出,关于成像表面8a的球面表面的大彗形像差和偏移在视场角+30°处发生。
图4是图示条件表达式(1)中的|Rl|/Ll的值和彗形像差之间的关系的图。在图4中,横轴表示|Rl|/Ll的值,并且垂直轴表示在成像表面处发生的彗形像差的量(mm)。从图中可以清楚地看出,彗形像差在|Rl|/Ll=1.0周围最小,并且越远离|Rl|/Ll=1.0,彗形像差增加。可以看出,在低于|Rl|/Ll=0.7和高于|Rl|/Ll=1.5的情况下,发生特别大量的彗形像差。
因此,本示例使得能够通过使折射表面11a的形状成为满足条件表达式(1)的点对称形状来抑制轴外像差的发生。此外,满足以下条件表达式(1′)甚至是更优选的。
0.8≤|Rl|/Ll≤1.3 (1′)
(关于后组2)
根据本示例的反射表面12b用于校正像场弯曲。具体地,当反射表面12b的曲率半径是Rm(mm)并且孔径光阑3和反射表面12b之间的距离是Lm(mm)时,反射表面12b的形状满足以下条件表达式(2)。
2≤|Rm|/Lm≤7 (2)
当超过条件表达式(2)的上限值时,像场弯曲增加并且不可获得良好的成像性能。此外,当低于条件表达式(2)的下限值时,设置在像面4处的成像设备或显示设备干扰光路。这将在下面描述。
图5是用于描述凹反射表面的行为的图,图示了其中假设前组不存在,已穿过孔径光阑3并在反射表面9a、9b、9c和9d处被反射的光通量在像面4处被收集的方式。反射表面9a、9b、9c和9d各自具有Rm=-20.0000mm的曲率半径,这与根据本示例的反射表面12b相同。注意的是,在图5中仅图示了视场角+10°、+20°和+30°的光通量。
在图5(a)中,孔径光阑3和反射表面9a之间在光轴A上的距离是Lm=11.765mm,这与根据本示例的光学系统10不同,因此条件表达式(2)由于|Rm|/Lm=1.7而不满足。在图5(b)中,孔径光阑3和反射表面9b之间在光轴A上的距离是Lm=10.000mm,这与根据本示例的光学系统10不同,但是条件表达式(2)由于|Rm|/Lm=2.0而满足。
在图5(c)中,孔径光阑3和反射表面9c之间在光轴A上的距离是Lm=5.405mm,这与根据本示例的光学系统10相同,但是条件表达式(2)由于|Rm|/Lm=3.7而满足。在图5(d)中,孔径光阑3和反射表面9d之间在光轴A上的距离是Lm=3.333mm,这与根据本示例的光学系统10不同,但是条件表达式(2)由于|Rm|/Lm=7.0而满足。
现在,在图5(c)中,在反射表面9c处反射的光通量在距反射表面9c的曲率半径Rm的1/2处被收集到像面4。即,从光轴A上的反射表面9c上的点到光轴方向上的像面4的距离是L_img=10.000mm,其比孔径光阑3和反射表面9c之间的距离Lm长。以相同的方式,距离L_img也比图5(d)中的距离Lm长。距离L_img和距离Lm在图5(b)中相同。
现在,可以进行构造,使得来自孔径光阑3的朝向反射表面9b、9c和9d的光通量不会干扰像面4。因此,当向成像装置或投影装置应用反射表面9b、9c和9d时,可以确保足够的区域来设置成像设备或显示设备。注意的是,在图5(d)中,垂直视场角优选地设置为使得来自反射表面9d的朝向像面4的光通量不会干扰孔径光阑3。另一方面,在图5(a)中,距离L_img比距离Lm短,因此像面4的一部分将与来自孔径光阑3的朝向反射表面9a的光通量重叠。
图6是图示图5(a)至图5(d)中的每一个中的像面4处的像场弯曲的图。图7是图示条件表达式(2)中的|Rm|/Lm的值和像场弯曲之间的关系的图。图7中的水平轴表示|Rm|/Lm的值,并且垂直轴表示在像面4处发生的像场弯曲的量(mm)。
从图6和图7中可以清楚地看出,当|Rm|/Lm=3.7时,子午像场弯曲量dM和弧矢像场弯曲量dS分布到像面的任一侧,因此在子午像面和弧矢平面之间的中间位置处的平均像面处的像场弯曲量近似为零。当|Rm|/Lm超过3.7时,像场弯曲的量在正方向上增加,并且像场弯曲的量在|Rm|/Lm=7.0的周围超过+0.5mm,而子午像场弯曲量dM达到+1.5mm。
因此,根据本示例,通过使反射表面12b的形状成为满足条件表达式(2)的形状,可以有利地校正像场弯曲同时避免像面4与光路之间的干扰。此外,满足以下条件表达式(2′)甚至是更优选的。
2.5≤|Rm|/Lm≤5 (2′)
图8是图示根据本示例的光学系统10中的前组1、后组2和整个系统的像场弯曲的图。注意的是,前组1的像场弯曲表示实际成像平面相对于来自点对称形状透镜表面的理想球面成像平面的偏移(曲率半径R=-19.3498mm)。前组1表现出关于平坦面的像场弯曲,但是关于球面表面的像场弯曲为零,如图8所示,并且像散也为零。后组2相对于理想的平面像面表现出大的子午像场弯曲和弧矢像场弯曲,但是平均像面的像场弯曲为零。
如图8所示,光学系统10的整个系统表现出与后组2的像场弯曲相同的子午像场弯曲和弧矢像场弯曲的形状,并且平均像面的像场弯曲为零。不仅如此,子午像场弯曲和弧矢像场弯曲的绝对值被抑制到整个系统的小值。
因此,根据光学系统10,可以通过满足条件表达式(1)的折射表面11a来校正子午像场弯曲和弧矢像场弯曲,并且可以通过满足条件表达式(2)的反射表面12b来校正平均像面的像场弯曲。即,由前组1形成的球面主像面作为物平面,并由后组2重新成像,从而使得平面像面4处的像场弯曲可以被有利地校正。
虽然在本示例中采用了其中前组1和后组2中的每一个由单个光学元件构成的构造,但是它们各自可以根据需要由多个光学元件构成。在这样做时,可以提供多个折射表面和反射表面。同样在这种情况下,通过其中多个折射表面中的至少一个满足条件表达式(1),并且多个反射表面中的至少一个满足条件表达式(2)的构造,可以获得本发明的优点。
现在,根据本示例的光学系统10中的前组1和后组2中的每一个具有正焦度。根据光学系统10,可以仅通过具有正焦度的光学元件有利地校正像场弯曲,因此可以使整个系统具有正焦度而不增加各个组的正焦度。因此,可以减小每个光学表面的焦度,从而抑制发生的像差量。前组1的焦度被设定为比光学系统10中的后组2的焦度更强。因此,在其中整个系统的焦度恒定的情况下,与其中后组2的焦度设置得比前组1的焦度弱的情况相比,从孔径光阑3到像面4的距离可以设置得更长,因此像面4可以被布置成以便不干扰光通量。
此外,优选地满足以下条件表达式(3),其中ff是从光学系统10中最靠近物体表面的光学表面(第一光学元件11的折射表面11a)到紧邻反射表面12b之前的光学表面(第一光学元件11的第二表面11b)的光学部件(光学元件组)的焦距。但是,注意的是,在其中后组2具有多个反射表面的情况下,其具有最大焦度的反射表面足以满足条件表达式(3)。
0.5≤|Rm|/ff≤2 (3)
满足条件表达式(3)使得能够通过反射表面12b有利地校正像场弯曲,同时避免像面4和光路之间的干扰。当低于条件表达式(3)的下限值时,像面4和光路之间可能存在干扰。另外,当超过条件表达式(3)的上限值时,存在不能充分获得通过反射表面12b校正像场弯曲的效果的可能性。在本示例中,ff=19.3mm并且Rm=-20.0000mm,因此满足条件表达式(3),这是因为|Rm|/ff=1.04。
此外,优选地满足以下条件表达式(4),其中f是光学系统10的整个系统的焦距。但是,注意的是,在其中后组2具有多个反射表面的情况下,其具有最大焦度的反射表面足以满足条件表达式(4)。
0.25≤f/|Rm|≤0.45 (4)
当低于条件表达式(4)的下限值时,像面4和光路之间可能存在干扰。另外,当超过条件表达式(4)的上限值时,存在无法充分获得通过反射表面12b校正像场弯曲的效果的可能性。在本示例中,f=8.1mm并且Rm=-20.0000mm,因此满足条件表达式(4),这是因为f/|Rm|=0.41。
此外,光学系统10优选地被构造为使得孔径光阑3的中心点和入射光瞳的中心点(放大侧光瞳)彼此紧密接近。具体地,优选地满足以下条件表达式(5),其中Lp(mm)是孔径光阑3和入射光瞳之间的距离。
0.0≤Lp/f≤0.2 (5)
满足条件表达式(5)使得能够实现其中各种视场角的光线以接近垂直的角度进入点对称形状的折射表面的同心构造,这便于通过点对称形状的折射表面来校正像差。超过条件表达式(5)的上限值导致偏离同心构造,并且不能充分获得点对称形状的折射表面的效果。在本示例中,孔径光阑3和入射光瞳之间的距离是Lp=0.00mm,因此Lp/f=0.00,并且满足条件表达式(5)。
表2示出了根据本示例的光学系统10中的条件表达式(1)至(5)的值。
[表2]

因此,根据本示例的光学系统10,可以以简单且小的构造在宽视场角上实现高分辨率。在其中光学系统10应用于成像装置或投影装置的情况下,可以使像面4成为平面形状,从而可以实现整个装置尺寸的减小。
[第二示例]
图9是在包括光轴A的YZ横截面中具有根据本发明的第二示例的光学系统20的成像装置100的主要部分的示意图。
成像装置100包括:用作成像光学系统的光学系统20、成像元件101、电缆102和处理单元103。在成像装置100中,光学系统20从图示中省略的被摄体收集光通量,并且在成像元件101的像面(光接收平面)4上对被摄体进行成像。成像元件101对由光学系统20形成的被摄体的图像执行光电转换,并输出电信号。处理单元103处理经由线缆102传输的来自成像元件101的电信号,并获得被摄体的图像数据。
图10是在包括光轴A的YZ横截面中的光学系统20的主要部分的示意图。与第一示例不同,根据本示例的光学系统20具有彼此接合的四个光学元件。具体地,在光学系统20中,比孔径光阑3更靠近被摄体侧的前组1从物侧起依次包括第一光学元件21和第二光学元件22,并且比孔径光阑3更靠近像侧的后组2从物侧起依次包括第三光学元件23和第四光学元件24。孔径光阑3设置在第二光学元件22和第三光学元件23的接合表面处。
在前组1中,第一光学元件21是非球面透镜,其具有作为非球面的第一表面21a和作为球面的第二表面21b,并且第二光学元件22是具有两者都是球面的第一表面22a和第二表面22b的球面表面。在后组2中,第三光学元件23是具有第一表面23a、第二表面23b和第三表面23c的透镜,第一表面23a、第二表面23b和第三表面23c均为球面,并且第四光学元件24是具有作为球面的第一表面24a和作为非球面的第二表面24b的透镜。注意的是,第四光学元件24的第二表面24b是其中已形成反射膜的内反射表面。
根据本示例的光学系统20具有的每个光学表面的表面顶点在光轴A上。注意的是,虽然第三光学元件23的第三表面23c不与光轴A相交,但是其形状是在光轴A(光轴A和中心轴匹配)上具有表面顶点的球面表面的局部切口。还要注意的是,在本示例中,非球面表面在光轴A上是旋转对称形状的中心,并且用以下非球面表达式表示。
[数学公式1]

这里,z是光轴方向上的非球面形状的弧矢(mm),c是光轴A处的曲率(1/mm),k是圆锥常数,r是相对于光轴A的在径向方向上的距离(mm),并且A至G分别是第四项至第十六项的非球面系数。注意的是,在该非球面表达式中,第一项指示基础球面的凹陷(sag),该基础球面的曲率半径为R=1/c。第二项和后面的项指示赋予基础球面的非球面分量的弧矢。
注意的是,在本示例中,在其中光学表面是非球面的情况下,基础球面的曲率半径被用作该光学表面的曲率半径,并且构造使得该曲率半径满足条件表达式。但是,注意的是,非球面形状的近轴曲率半径可以用作曲率半径。而且,在某个位置处的表面法线和光轴A之间的交点可以被认为是光学表面的曲率中心,从而考虑非球面的局部曲率。
表3图示了根据本示例的光学系统20的规格值。注意的是,在表3中,彼此接合的光学表面表示为同一表面。设置在光学表面之间的接合表面上的孔径光阑3也表示为与接合表面同一面。
[表3]


来自未示出的被摄体的光通量穿过第一光学元件21和第二光学元件22,并且然后被孔径光阑3的屏蔽部分限制。已经穿过孔径光阑3的孔径部分的光通量依次穿过第三光学元件23的第一表面23a和第二表面23b以及第四光学元件24的第一表面24a,并在第四光学元件24的第二表面24b处反射。反射的光通量再次透射通过第四光学元件24的第一表面24a,依次透射通过第三光学元件23的第二表面23b和第三表面23c,并形成平面形状的像面4。
在光学系统20中,前组1具有的三个光学表面,即第一光学元件21的第一表面21a、第一光学元件21的第二表面21b以及第二光学元件的第一表面22a是满足条件表达式(1)的点对称形状的折射表面。根据该构造,可以抑制轴外像差的发生。
具体地,关于折射表面21a,基础球面的曲率半径是Rl=24.3155mm,并且孔径光阑3的中心点P1在光轴A上的距离是Ll=21.3461mm,因此|Rl|/Ll=1.14,因此满足条件表达式(1)和(1′)。另外,关于折射表面21b和22a,基础球面的曲率半径是Rl=11.8959mm,并且孔径光阑3的中心点P1在光轴A上的距离是Ll=9.3461mm,因此|Rl|/Ll=1.27,因此满足条件表达式(1)和(1′)。
注意的是,在其中如本示例中存在满足条件表达式(1)的多个折射表面的情况下,优选地满足以下条件表达式(6):其中最靠近物侧的折射表面的曲率中心和另一个折射表面的曲率中心之间的距离是Dc(mm),并且整个系统的焦距是f(mm)。
0.0≤Dc/f≤0.1 (6)
满足条件表达式(6)使得每个点对称形状的折射表面的曲率中心的位置更靠近,因此可以更进一步地抑制彗形像差的发生量。当超过条件表达式(6)的上限值时,由于每个点对称形状的折射表面而发生彗形像差,并且实现高分辨率变得困难。在本实施例中,折射表面21a的曲率中心C21a与折射表面21b和22a的曲率中心C21b和C22a之间的距离是Dc=0.4196mm,并且整个系统的焦距是f=27.0mm,因此Dc/f=0.016,并且因此满足条件表达式(6)。
此外,在采用如本实施例中的满足条件表达式(1)的折射表面的情况下,优选地提供具有负焦度的折射表面。在根据本示例的光学系统20中,第一光学元件21的第二表面21b和第二光学元件22的第一表面22a之间的接合表面、以及第二光学元件22的第二表面22b和第三光学元件23的第一表面23a之间的接合表面是具有负焦度的折射表面。这些具有负焦度的折射表面使得能够有利地校正在具有正焦度的折射表面21a处发生的轴上像差。
此时,具有负焦度的折射表面优选地设置在靠近物侧的折射表面21a和折射表面24b之间。此外,具有负焦度的折射表面甚至更优选地具有满足条件表达式(1)的点对称形状,并且优选地满足以下条件表达式(7),其中其负焦度是φl并且整个系统的焦度是φ。
φl/φ≤-0.27 (7)
采用具有满足条件表达式(7)的强负焦度的折射表面便于校正轴上像差,诸如球面像差和轴向色差。甚至在采用具有这种强负焦度的折射表面的情况下,也可以通过具有点对称形状的折射表面在抑制彗形像差和像散的发生的同时有利地校正轴上像差。在本实施例中,折射表面21b和22a的焦度是φl=-0.020并且整个系统的焦度是φ=0.037,因此可以看出,满足条件表达式(1)的折射表面21b和22a满足条件表达式(7),这是因为φl/φ=-0.552。
另一方面,不满足条件表达式(1)的折射表面22b和23a的焦度是φl=-0.04,并且由于φl/φ=0.118,因此不满足条件表达式(7)。因此,非点对称形状的折射表面的负焦度优选地被设定为比条件表达式(7)所示的范围弱,因此可以在抑制彗形像差的发生的同时有利地校正轴向色差。
在根据本示例的光学系统20中,水平视场角是θx=30°(θx=-15°到+15°),垂直视场角是θy=20°(y=+14°到+34°),并且光圈值是F=2.0。因此,采用具有点对称形状的折射表面即使在具有宽视场角的明亮光学系统中也能够有利地校正像差,并且实现高分辨率。注意的是,相对于相邻介质的折射率差异大的光学表面,即,最靠近物侧的光学表面(与空气接触的光学表面)优选地是点对称形状的折射表面,如在本示例中那样。
在本示例中后组2具有的第四光学元件24是折反射透镜,其具有作为折射表面的第一表面24a和作为反射表面的第二表面24b,如图10所示。反射表面24b是凹反射表面。反射表面24b是由上面的非球面表达式定义的非球面,并且具有这样的形状:其中,与光轴A相比,边缘部分从凹基础球面向与像面4相对的一侧大幅变形。具体地,反射表面24b的基础球面的曲率半径是Rm=-77.9645mm,孔径光阑3的中心点P1在光轴A上的距离是Lm=18.5623mm,因此满足条件表达式(2)和(2′),这是因为|Rm|/Lm=4.20。
同样在本示例中,从最靠近物侧的光学表面(折射表面21a)到紧邻反射表面24b之前的光学表面(折射表面23b)的光学部分的焦距是ff=51.2mm,因此|Rm|/ff=1.52成立,并且因此满足条件表达式(3)。另外,f/|Rm|=0.35成立,因此满足条件表达式(4)。此外,也在本实施例中,如图10中所示,孔径光阑3的中心点P1和入射光瞳的中心点P2非常接近,并且满足条件表达式(5),这是因为Lp=1.756mm并且Lp/f=0.07。
在根据本示例的光学系统20中,最靠近孔径光阑3的光学表面22b和23a具有负焦度(φl=-0.004)。在设置在孔径光阑3附近的光学表面22b和23a处,每个视场角的光通量的主光线穿过每个光学表面的中心周围,但是每个视场角的光通量的边缘光线在远离每个光学表面的中心的位置处穿过。因此,即使光学表面22b和23a被赋予负焦度,每个视场角的主光线也几乎根本不折射,因此可以抑制横向色差的发生,并且可以校正轴向色差。此外,该构造使得能够增加从孔径光阑3到像面4的距离,从而便于避免像面4与光路之间的干扰。
表4示出了在根据本示例的光学系统20中条件表达式(1)至(7)的值。
[表4]

图11是图示与成像设备101的像面4的五个位置对应的视场角的图。视场角1是在水平方向(X方向)上具有中心视场角θx=0°和在垂直方向(Y方向)上具有最小视场角θy=+14°的视场角,即,是与像面4的中心下边缘对应的视场角。视场角2是在水平方向上具有中心视场角θx=0°并且在垂直方向上具有中心视场角θy=+24°的视场角,即,是与像面4的中心对应的视场角。视场角3是在水平方向上具有中心视场角θx=0°并且在垂直方向上具有最大视场角θy=+34°的视场角,即,是与像面4的中心上边缘对应的视场角。视场角4和视场角5是在水平方向上具有最大视场角θx=+15°并且在垂直方向上具有最小视场角θy=+14°和最大视场角θy=+34°的视场角,即,是与像面4的右下边缘和右上边缘对应的视场角。
图12是关于光学系统20的像差图,其中图12(a)是纵向像差图,并且图12(b)是横向像差图。图12(a)图示了关于C光线、d光线、F光线和g光线中的每一个的球面像差,关于d光线的水平方向和垂直方向像散和像场弯曲,以及关于d光线的畸变。注意的是,C光线是波长为656.2725nm的光,d光线是波长为587.5618nm的光,F光线是波长为486.1327nm的光,并且g光线是波长为435.8343nm的光。图12(b)示出了在图11中所示的五个视场角中C光线、d光线、F光线和g光线中的每一个的横向像差。
从图12(a)可以看出,相对于C光线、d光线、F光线和g光线的每个光谱的球面像差被抑制到0.025mm或更低,像散被抑制到0.007mm或更低,像场弯曲被抑制到0.009mm或更低,并且畸变被抑制到9%或更低。从图12(b)还可以看出,在每个视场角处横向像差被抑制到0.01mm或更低。此外,可以看出,相对照度是100%,没有发生由于孔径光阑3引起的渐晕,并且已经实现了从轴上到轴外明亮的光学系统。
因此,根据本示例的光学系统20,可以以简单且小的构造实现宽视场角上的高分辨率。特别地,即使焦距为长的f=27.0mm,并且光圈值为亮的F=2.0,也可以有利地校正像差。
[第三示例]
图13是在包括光轴A的YZ横截面中的根据本发明的第三示例的光学系统30的主要部分的示意图。关于根据本示例的光学系统30,整个系统的焦距是f=27.0mm,水平视场角是θx=45°(θx=-22.5°到+22.5°),垂直视场角是θy=30°(θy=+14°到+44°),并且光圈值是F=2.0。与根据第二示例的光学系统20不同,根据本示例的光学系统30使用具有前反射表面的光学元件(镜子)而不是具有内部反射表面的光学元件(折反射透镜)。
在光学系统30中,比孔径光阑3更靠近物侧的前组1从物侧起依次包括第一光学元件31和第二光学元件32,并且比孔径光阑3更靠近像侧的后组2从物侧起依次包括第三光学元件33和第四光学元件34。第一光学元件31、第二光学元件32和第三光学元件33是透镜,并且第四光学元件34是镜子(表面反射镜)。孔径光阑3设置在第二光学元件32和第三光学元件33的接合表面处。
表5图示了根据本示例的光学系统30的规格值。


来自未示出的被摄体的光通量穿过第一光学元件31和第二光学元件32,并且然后被孔径光阑3的屏蔽部分限制。已经穿过孔径光阑3的孔径部分的光通量依次穿过第三光学元件33的第一表面33a和第二表面33b,并在第四光学元件34的反射表面34a处反射。反射的光通量再次透射过第三光学元件33的第二表面33b,从第三表面33c发射、并形成平面形状的像面4。
在根据本示例的光学系统30中,前组1具有的三个光学表面,即,第一光学元件31的第一表面31a、第一光学元件31的第二表面31b和第二光学元件32的第一表面32a,是满足条件表达式(1)的点对称形状的折射表面。
具体地,关于折射表面31a,基础球面的曲率半径是Rl=25.3992mm,并且孔径光阑3在光轴A上的距离是Ll=23.5097mm,因此|Rl|/Ll=1.08,并且因此满足条件表达式(1)和(1′)。另外,关于折射表面31b和32a,基础球面的曲率半径是Rl=11.7310mm,并且孔径光阑3在光轴A上的距离是Ll=9.5370mm,因此|Rl|/Ll=1.23,并且因此满足条件表达式(1)和(1′)。
孔径光阑3和入射光瞳之间在光轴A上的距离为Lp=0.840mm,并且Lp/f=0.03,因此满足条件表达式(5)。折射表面31a的曲率中心与折射表面31b和32a的曲率中心之间的距离是Dc=0.3045mm,因此Dc/f=0.01,并且因此满足条件表达式(6)。此外,折射表面31b和32a的焦度是φl=-0.013并且整个系统的焦度是φ=0.037,因此满足条件表达式(1)的折射表面31b和32a满足条件表达式(7),这是因为φl/φ=0.345。
根据本示例的第四光学元件34的反射表面34a是凹的非球面。根据本示例的反射表面34a也是由以上非球面表达式以与第二示例中的反射表面24b相同的方式定义的非球面,并且具有这样的形状:其中,与光轴A相比,边缘部分从凹基础球面向与像面4相对的一侧大幅变形。
具体地,反射表面34a的基础球面的曲率半径是Rm=-76.3425mm,孔径光阑3在光轴A上的距离是Lm=18.9603mm,因此满足条件表达式(2)和(2′),这是因为|Rm|/Lm=4.03。同样在本示例中,从最靠近物侧的光学表面(折射表面31a)到紧邻反射表面34a之前的光学表面(折射表面33b)的焦距是ff=51.1mm,因此|Rm|/ff=1.49成立,并且因此满足条件表达式(3)。此外,f/|Rm|=0.35成立,因此满足条件表达式(4)。
表6示出了根据本示例的光学系统30中条件表达式(1)至(7)的值。
[表6]

图14是关于光学系统30的像差图,其中图14(a)和图14(b)分别以与图12中相同的方式示出了光学系统30的纵向像差和横向像差。从图14(a)中可以看出,相对于C光线、d光线、F光线和g光线的每个光谱的球面像差被抑制到0.03mm或更低,像散被抑制到0.02mm或更低,并且像场弯曲被抑制到0.04mm或更低。从图14(b)还可以看出,在每个视场角处横向像差被抑制到0.01mm或更低。
[第四示例]
图15是在包括光轴A的YZ横截面中的根据本发明的第四示例的光学系统40的主要部分的示意图。关于根据本示例的光学系统40,整个系统的焦距为f=28.5mm,水平视场角为θx=50°(θx=-25°到+25°),垂直视场角为θy=38°(θy=+15°到+53°),并且光圈值为F=2.0。与根据第二示例的光学系统20不同,根据本示例的光学系统40具有设置在反射表面的孔径光阑3,使得后组2的光轴Ar相对于前组1的光轴A倾斜。
在光学系统40中,比孔径光阑3更靠近物侧的前组1从物侧起依次包括第一光学元件41、第二光学元件42和第三光学元件43。比孔径光阑3更靠近像侧的后组2从物侧起依次包括第三光学元件43、第四光学元件44、第五光学元件45和第六光学元件46。即,在本示例中,前组1和后组2共享第三光学元件43的一部分。
第一光学元件41是弯月形透镜,其具有面对物侧的凸面,具有非球面第一表面41a和球面第二表面41b。第二光学元件42是弯月形透镜,其具有面对物侧的凸面,具有均为球面的第一表面42a和第二表面42b。第三光学元件43是具有以下四个光学表面的透镜:该四个光学表面是朝物侧凸起的第一表面43a、平面第二表面43b、朝像侧凸起的球面第三表面43c、以及非球面第三表面43d。
第三光学元件43的第一表面43a和第二表面43b的表面顶点位于前组1的光轴A上,而第三表面43c和第四表面43d的表面顶点位于后组2的光轴Ar上。孔径光阑3设置在第三光学元件43的第二表面43b上,并且孔径光阑3的开口部分是反射表面,而孔径光阑3的屏蔽部分是非反射表面(低反射表面)。
第四光学元件44是弯月形透镜,其具有面对像侧的凸面,具有均为球面的第一表面44a和第二表面44b。第五光学元件45是折反射透镜,其具有作为折射表面的第一表面45a和作为反射表面的第二表面45b,其中第一表面45a是朝像侧凸起的球面表面,并且第二表面45b是凹的非球面。第六光学元件46是具有第一表面46a和第二表面46b的盖玻璃,第一表面46a和第二表面46b均不具有焦度。
表7图示了根据本示例的光学系统40的规格值。



来自未示出的被摄体的光通量穿过第一光学元件41和第二光学元件42、透射过第三光学元件43的第一表面43a、并进入设置在第三光学元件43的第二表面43b上的孔径光阑3。在孔径光阑3的孔径操作中反射的光通量依次相继地透射过第三光学元件43的第三表面43c、第四光学元件44的第一表面44a、第四光学元件44的第二表面44b、第五光学元件45的第一表面45a,并且然后在第五光学元件45的第二表面45b处反射。反射的光通量再次依次透射过第五光学元件45的第一表面45a、第四光学元件44的第二表面44b、和第四光学元件44的第一表面44a,从第三光学元件43的第四表面43d发射,并且经由第六光学元件46形成平面的像面4。
因此,根据光学系统40,孔径光阑3的孔径部分是反射表面,并且后组2相对于前组1的光轴A偏心(倾斜或偏移),从而像面4的位置也可以偏心。这使得成像设备或显示设备能够在把光学系统40应用于成像装置或投影装置时相对于光轴A偏心,并且因此可以在避免干扰光路的同时提高设计的自由度。
在根据本示例的光学系统40中,前组1具有的三个光学表面,即,第一光学元件41的第一表面41a、第二光学元件42的第二表面42b、以及第三光学元件43的第一表面43a,是满足条件表达式(1)的点对称形状的折射表面。
具体地,关于折射表面41a,基础球面的曲率半径是Rl=33.703mm,并且孔径光阑3在光轴A上的距离是Ll=29.587mm,因此|Rl|/Ll=1.14,并且因此满足条件表达式(1)和(1′)。另外,关于折射表面42b和43a,基础球面的曲率半径是Rl=15.3768mm,并且孔径光阑3在光轴A上的距离是Ll=10.434mm,因此|Rl|/Ll=1.47,并且因此满足条件表达式(1)。
在本示例中,孔径光阑3和入射光瞳之间在光轴A上的距离为Lp=1.868mm,并且Lp/f=0.07,因此满足条件表达式(5)。折射表面41a的曲率中心与折射表面42b和43a的曲率中心之间的距离是Dc=0.827mm,因此Dc/f=0.03,并且因此满足条件表达式(6)。此外,折射表面42b和43a的焦度是φl=-0.010并且整个系统的焦度是φ=0.035,因此满足条件表达式(1)的折射表面42b和43a满足条件表达式(7),因为φl/φ=-0.276。
根据本示例的第五光学元件45的第二表面45b是如上所述的凹反射表面,并且也是由以上非球面表达式定义的非球面。反射表面45b的基础球面的曲率半径是Rm=96.540mm,孔径光阑3在光轴Ar上的距离是Lm=22.818mm,因此满足条件表达式(2)和(2′),这是因为|Rm|/Lm=4.23。同样在本示例中,从最靠近物侧的折射表面41a到紧邻后组2中具有最大焦度的反射表面45b之前的折射表面44b的光学部分的焦距为ff=62.2mm,因此|Rm|/ff=1.50成立,并且因此满足条件表达式(3)。此外,f/|Rm|=0.30成立,因此满足条件表达式(4)。
表8示出了在根据本示例的光学系统40中条件表达式(1)至(7)的值。
[表8]


图16是关于光学系统40的像差图,其中图16(a)和图16(b)分别示出了光学系统40的纵向像差和横向像差。从图16(a)中可以看出,关于C光线、d光线、F光线和g光线的每个光谱,有利地校正了球面像差、像散和像场弯曲。从图16(b)中还可以看出,在每个视场角处有利地校正了横向像差。
[第五示例]
图17是在包括光轴A的YZ横截面中的根据本发明的第五示例的光学系统50的主要部分的示意图。关于根据本示例的光学系统50,在水平横截面中,整个系统的焦距为f=15.7mm,视场角为θx=50°(θx=-25°到+25°),并且光圈值为F=1.2。在垂直横截面中,整个系统的焦距为f=16.0mm,视场角为θy=34.5°(θy=+8°到+42.5°),并且光圈值是F=3.4。与其它实施例的光学系统不同,根据本示例的光学系统50具有相对于孔径光阑3设置在像侧上的全反射表面和偏心表面。
在光学系统50中,比孔径光阑3更靠近物侧的前组1从物侧起依次包括第一光学元件51、第二光学元件52和第三光学元件53。比孔径光阑3更靠近像侧的后组2从物侧起依次包括第四光学元件54、第五光学元件55、第六光学元件56和第七光学元件57。
第一光学元件51是双凸透镜,其具有非球面第一表面51a和球面第二表面51b。第二光学元件52是双凹透镜,其具有均为球面的第一表面52a和第二表面52b。第三光学元件53是弯月形透镜,其中具有面对物侧的凸面,具有均为球面的第一表面53a和第二表面53b。
第四光学元件54是双凸透镜,其具有均为球面的第一表面54a和第二表面54b。孔径光阑3设置在第四光学元件54的第一表面54a上。第五光学元件55是具有三个光学表面的透镜,这三个光学表面是球面第一表面55a、平面第二表面55b和作为非球面反射表面的第三表面55c。第六光学元件56是双凸透镜,其具有均为球面的第一表面56a和第二表面56b。第七光学元件57是盖玻璃,其具有第一表面57a和第二表面57b,两者都没有焦度。
注意的是,在光学系统50中,从物侧起依次从第一光学元件51的第一表面51a到第五光学元件55的第二表面55b的光学表面被设置在光轴A上,并且其它表面设置在不与光轴A相交的位置处。第五光学元件55的第二表面55b到第七光学元件57的第二表面57b的光学表面都是偏心表面,其中心(表面顶点)偏离光轴A。例如,第二表面55b和第三表面55c各自是在X轴上具有-25.36°的倾斜度的倾斜的偏心表面,并且进一步地第三表面55c通过在垂直横截面内的偏移而偏心。
因此,根据光学系统50,与第四示例中的方式相同,采用相对于光轴A偏心的光学元件也使得像面4的位置能够偏心,因此可以在避免成像设备或显示设备与光路的干扰的同时提高设计的自由度。
表9图示了根据本示例的光学系统50的规格值。



来自未示出的被摄体的光通量依次穿过第一光学元件51、第二光学元件52和第三光学元件53,并且被设置在第四光学元件54的第一表面54a处的孔径光阑3限制。已经穿过孔径光阑3的孔径的光通量依次透射过第四光学元件54的第二表面54b和第五光学元件55的第一表面55a,并且然后在第五光学元件55的第二表面55b处经历全反射并且极大地改变行进的方向,并且被输入到第五光学元件55的第三表面55c。已在第五光学元件55的第三表面55c处反射的光通量依次透射过第五光学元件55的第二表面55b、第六光学元件56的第一表面56a、和第六光学元件56的第二表面56b,并经由第七光学元件57形成平面的像面4。
在根据本示例的光学系统50中,前组1具有的三个光学表面,即,第一光学元件51的第一表面51a、第四光学元件54的第二表面54b以及第五光学元件55的第一表面55a,是满足条件表达式(1)的点对称形状的折射表面。
具体地,关于折射表面51a,基础球面的曲率半径为Rl=20.298mm,并且孔径光阑3在光轴A上的距离是Ll=17.300mm,因此|Rl|/Ll=1.17,并且因此满足条件表达式(1)和(1′)。另外,关于折射表面54b和55a,基础球面的曲率半径为Rl=-8.087mm,并且孔径光阑3在光轴A上的距离为Ll=6.500mm,因此|Rl|/Ll=1.24,并且因此满足条件表达式(1)和(1′)。
此外,孔径光阑3和入射光瞳之间在光轴A上的距离为Lp=1.93mm,并且通过焦距f=15.7mm进行的归一化产生Lp/f=0.12,因此满足条件表达式(5)。此外,折射表面54b和55a的焦度为φl=-0.021并且整个系统的焦度为φ=0.064,因此满足条件表达式(1)的折射表面54b和55a满足条件表达式(7),这是因为φl/φ=-0.323。
采用其中前组1和后组2都具有如本示例中满足条件表达式(1)的折射表面的构造使得能够有利地校正球面像差和轴向色差。在这样做时,该构造优选地使得折射表面的曲率中心位于孔径光阑3附近。此外,该构造优选地使得前组1中的折射表面的曲率中心和后组2中的折射表面的曲率中心相对彼此在孔径光阑3的相对侧上。具体地,朝物侧凸起的折射表面优选地位于前组1中,并且朝物侧凹入的折射表面优选地位于后组2中。
优选地满足以下条件表达式(8):其中,被包括在前组1中的折射表面的曲率中心和孔径光阑3之间的距离是D1(mm)并且被包括在后组2中的折射表面的曲率中心和孔径光阑3之间的距离是D2(mm)。如这里使用的“距离”指示“沿着光路的距离”,并且沿着朝像侧的光路为正,而朝物侧为负。
-0.2≤(D1+D2)/f≤0.2 (8)
满足条件表达式(8)使得能够在抑制彗形像差的发生的同时有利地校正像散,这是因为前组1和后组2各自具有的折射表面的曲率中心位于与孔径光阑3接近并且等距离的位置处。在本示例中,从前组1的折射表面51a的曲率中心到孔径光阑3的距离为D1=3.00mm,并且从后组2的折射表面54b的曲率中心到孔径光阑3的距离是D2=-1.59mm,因此满足条件表达式(8),这是因为(D1+D2)/f=0.09成立。
图18是从根据本示例的光学系统50中提取出的仅第四光学元件54和第五光学元件55的图示。第五光学元件55从平凸透镜切掉与其它光学元件重叠的部分和有效光通量不通过的不必要部分(虚线),该平凸透镜包括朝物侧凸起的球面表面以及平面表面,如图18所示。
第四光学元件54的第一表面54a的表面顶点和第五光学元件55的第一表面55a和第二表面55b各自位于光轴A上,但是第五光学元件55的第三表面55c的表面顶点P5相对于光轴A偏心。因此,孔径光阑3和第三表面55c之间的距离被定义为Lm=La+Lb,其中孔径光阑3和第二表面55b之间在光轴A上的距离为La,并且在穿过第三表面55c的表面顶点P5的法线Ar上第二表面55b和第三表面55c之间的距离是Lb。这里La=8.500mm并且Lb=9.800mm,因此Lm=18.300mm。
第三表面55c的基础球面的曲率半径是Rm=43.422mm,并且|Rm|/Lm=2.37成立,因此满足条件表达式(2)。同样在本示例中,从最接近物侧的折射表面51a到紧邻后组2中具有最大焦度的反射表面55c之前的折射表面55b的光学部分的焦距是ff=62.4mm,因此|Rm|/ff=0.70成立,并且因此满足条件表达式(3)。此外,整个系统的焦距是15.7mm,并且f/|Rm|=0.36成立,因此满足条件表达式(4)。
表10示出了在根据本示例的光学系统50中条件表达式(1)至(5)、(7)和(8)的值。
[表10]

如上所述,在根据本示例的光学系统50中,第五光学元件55的第二表面55b相对于光轴A倾斜设置,并且其中更靠近像侧的光学表面在垂直横截面中偏心,从而也使像面4在垂直横截面中偏心。因此,在本示例中,椭圆形孔设置在孔径光阑3处,其中孔的长轴在水平横截面中是平行的,并且孔的短轴在垂直横截面中是平行的。即,孔径光阑3被设置成使得孔的长轴与水平方向匹配,并且孔的短轴与垂直方向匹配。
因此,可以进行这样的布置:其中在第五光学元件55的第二表面55b处反射的光线的光路不会干扰第五光学元件55的第一表面55a,同时缩短从孔径光阑3到后组2中具有最强焦度的反射表面55c的光路。如果从孔径光阑3到反射表面55c的光路长,则从反射表面55c到像面4的光路变短并且像面4的定位变得困难。具体地,根据本示例的孔径光阑3设置有椭圆形孔,其在水平方向上的长轴的长度为7.6mm并且在垂直方向上的短轴的长度为3.0mm。
图19是关于光学系统50的像差图,其中图19(a)和图19(b)分别是纵向像差图和横向像差图。从图19(a)中可以看出,关于C光线、d光线、F光线和g光线的每个光谱,有利地校正了球面像差、像散和像场弯曲。从图19(b)中还可以看出,在每个视场角处有利地校正了横向像差。
虽然上面已经描述了本发明的优选实施例和示例,但是本发明不限于这些实施例和示例,并且可以在其本质的范围内做出各种组合、修改和变更。
如上所述,示例中的光学系统可以不加改变地应用于投影装置。在这种情况下,成像装置中的物侧(缩小侧)和像侧(放大侧)反转并且光路变为相反,前组1变为后组,并且后组2变为前组,光学元件的入射表面变为出射表面,并且出射表面变为入射表面。即,可以进行这样的构造:其中在布置在物侧的显示设备的显示表面(缩小表面)上显示的图像被投影(成像)在由光学系统设置在像侧的诸如屏幕等的投影表面(放大表面)中。
示例中的条件表达式也优选地在投影光学系统中以与成像光学系统中相同的方式满足。在这种情况下,在条件表达式(5)中,成像光学系统中的孔径光阑处的入射光瞳(放大侧光瞳)与投影光学系统中的孔径光阑的出射光瞳(缩小侧光瞳)对应。
[车载相机系统]
图20是根据本实施例的车载相机610以及具有车载相机610的车载相机系统(驾驶辅助装置)600的构造图。车载相机系统600是安装在诸如机动车等的车辆中的装置,并且基于由车载相机610获得的车辆周围环境的图像信息来辅助车辆的驾驶。图21是具有车载相机系统600的车辆700的示意图。虽然图21图示了其中车载相机610的成像范围650被设定在车辆700之前的情况,但是成像范围650可以被设定在车辆700之后。
车载相机系统600包括车载相机610、车辆信息获取设备620、控制设备(ECU:电子控制单元)630和警告设备640,如图20所示。车载相机610包括:成像单元601、图像处理单元602、视差计算单元603、距离计算单元604和碰撞确定单元605。成像单元601具有根据上述任一示例所述的光学系统以及像面相位差传感器。注意的是,根据本实施例的像面相位差传感器和图像处理单元602对应于例如图9中所示的第二示例中成像装置100具有的成像设备101和处理单元103。
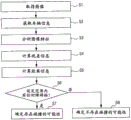
图22是图示根据本实施例的车载相机系统600的操作的示例的流程图。下面将根据该流程图描述车载相机系统600的操作。
首先,成像单元601用于对车辆周围的物体(被摄体)进行成像,并且在步骤S1中获得多个图像数据(视差图像数据)。
在步骤S2中,从车辆信息获取设备620获得车辆信息。车辆信息是包括车辆速度、横摆率、转向角度等的信息。
在步骤S3中,图像处理单元602对由成像单元601获得的多个图像数据执行图像处理。具体地,执行图像特征分析,其中图像数据中的诸如边缘量、方向、协调值等的特征被分析。这里的图像特征分析可以对多个图像数据中的每一个执行,或者可以仅对多个图像数据中的一部分图像数据执行。
在步骤S4中,视差计算单元603计算由成像单元601获得的多个图像数据之间的视差(图像偏移)信息。诸如SSDA方法、图像相关等的已知方法可以用作视差信息的计算方法,因此在本实施例中将省略其描述。注意的是,步骤S2、S3和S4可以按照上述顺序处理,或者可以并行执行。
在步骤S5中,距离计算单元604计算到由成像单元601成像的物体的距离信息。可以基于由视差计算单元603计算出的视差信息和成像单元601的内部参数以及外部参数来计算距离信息。如这里使用的距离信息是与相对于物体的相对位置有关的信息,诸如到物体的距离、散焦量、图像偏移量等,并且可以是直接表示到图像中的物体的距离值的信息,或者可以是间接表示与距离值对应的信息。
然后,碰撞确定单元605在步骤S6中执行关于由距离计算单元604计算出的距离信息是否被包括在已经被预先设定的设定距离的范围内的确定。因此,可以确定在设定距离内是否存在车辆周围的障碍物,并且可以确定车辆与障碍物碰撞的可能性。在其中设定距离内存在障碍物的情况下,碰撞确定单元605确定存在碰撞的可能性(步骤S7),并且在其中设定距离内没有障碍物的情况下,确定不存在碰撞的可能性(步骤S8)。
接下来,在已确定存在碰撞的可能性的情况下(步骤S7),碰撞确定单元605将确定结果通知给控制设备630和警告设备640。控制设备630基于碰撞确定单元605的确定结果来控制车辆,并且警告设备640基于碰撞确定单元605的确定结果发出警告。
例如,控制设备630执行车辆的控制,诸如施加制动、放松加速器、生成控制信号以在车轮处生成制动力以及抑制发动机或电动机的输出等。警告设备640通过如下来警告车辆的用户(驾驶员):产生警告声等、在汽车导航系统等的屏幕显示警告信息、向安全带或方向盘施加振动等。
因此,根据本实施例的车载相机系统600,上述处理使得能够有效地检测障碍物,并且能够避免车辆与障碍物的碰撞。特别地,将根据上述示例的光学系统应用于车载相机系统600使得能够在侧视场角上以高精度执行障碍物检测和碰撞确定,同时减小整个车载相机610的尺寸并增加布局的自由度。
现在,在本实施例中已经描述了其中车载相机610仅具有一个具有像面相位差传感器的成像单元601的构造,但是这不是限制性的,并且可以采用具有两个成像单元的立体相机作为车载相机610。在这种情况下,即使不使用像面相位差传感器,也可以通过由两个同步成像单元中的每一个同时获得图像数据并使用这两个图像数据来执行与上述相同的处理。但是,注意的是,如果两个成像单元的成像时间的差异是已知的,则两个成像单元不必同步。
注意的是,关于距离信息的计算可以设想各种实施例。作为一个示例,将描述采用具有在二维阵列中规则排列的多个像素单元的分裂光瞳成像设备作为成像单元601具有的成像设备的情况。在分裂光瞳成像设备中,一个像素单元由微透镜和多个光电转换单元构成。可以接收穿过光学系统的光瞳中的不同区域的一对光通量,并且可以从相应光电转换单元输出一对图像数据。
通过计算图像数据对之间的相关性来计算每个区域中的图像偏移量,并且由距离计算单元604计算表示图像偏移量的分布的图像偏移图数据。替代地,距离计算单元604可以将图像偏移量转换为散焦量,并生成表示散焦量分布(在成像图像的二维平面上的分布)的散焦图数据。此外,距离计算单元604可以获得已经从散焦量转换的关于到物体的距离的距离图数据。
如上所述,根据示例的光学系统的垂直视场角仅针对光轴A在一侧设定。因此,在将根据示例的光学系统应用于车载相机610并将该车载相机610安装在车辆中的情况下,优选地执行安装以使得光学系统的光轴A不平行于水平方向。例如,在采用根据图1中所示的第一示例的光学系统10的情况下,光轴A可以相对于水平方向(Z方向)向上倾斜,使得垂直视场角的中心更接近水平方向。替代地,光学系统10可以在X轴上旋转180°(垂直反转),并且被设置成使得光轴A相对于水平方向朝下侧倾斜。因此,可以适当地设定车载相机610的成像范围。
但是,如上所述,在光学系统中光学性能在轴上是最高的,并且光学性能在边缘视场处是较低的,因此甚至更优选地进行定位使得来自感兴趣的成像物体的光在光学系统的轴附近穿过。例如,在其中需要利用车载相机610聚焦道路上的交通标志和障碍物等的情况下,优选地在水平方向的下侧(地面侧)而不是在上侧(天空侧)的视场角处提高光学性能。在采用根据第一示例的光学系统10的情况下,光学系统10可以临时垂直反转,并且然后光轴A相对于水平方向向下倾斜,使得光轴A附近的视场角被向下引导。
虽然在本实施例中车载相机系统600已经应用于驾驶支持(碰撞损害减少),但这不是限制性的,并且车载相机系统600可以应用于巡航控制(包括具有全速范围跟踪功能的巡航控制)和自动驾驶等。车载相机系统600的应用也不限于诸如汽车等的车辆,并且可以应用于诸如船舶、飞机、工业机器人等的移动体(移动设备)。这也不限于根据本实施例的车载相机610和移动体,并且可以广泛地应用于使用物体识别的设备,诸如智能运输系统(ITS)等。
本发明不限于上述实施例,并且在不脱离本发明的精神和范围的情况下,可以做出各种更改和修改。因此,所附权利要求用以阐明本发明的范围。
本申请要求基于2016年3月4日提交的日本专利申请号2016-042686的优先权,该申请通过引用而被整体结合于此。
参考标号
1 前组
2 后组
3 孔径光阑
4 像面
10 光学系统
11a 折射表面
12b 反射表面
Claims (19)
1.一种光学系统,从放大侧起依次包括前组、孔径光阑和后组,
其中前组包括朝放大侧凸起的满足以下表达式(1)的多个折射表面:
0.7≤|Rl|/Ll≤1.5 (1)
其中折射表面的曲率半径为Rl(mm)并且折射表面与孔径光阑之间的距离为Ll(mm),
其中后组包括满足以下表达式(2)的凹的反射表面:
2≤|Rm|/Lm≤7 (2)
其中反射表面的曲率半径是Rm(mm),并且孔径光阑和反射表面之间的距离是Lm(mm)。
2.如权利要求1所述的光学系统,
其中满足以下条件表达式(3),
0.5≤|Rm|/ff≤2 (3)
其中ff是从最靠近前组中的放大侧的光学表面到紧邻反射表面之前的光学表面的光学部分的焦距。
3.如权利要求1所述的光学系统,
其中满足以下条件表达式(4),
0.25≤f/|Rm|≤0.45 (4)
其中f是光学系统的焦距。
4.如权利要求1所述的光学系统,
其中满足以下条件表达式(5),
0.0≤Lp/f≤0.2 (5)
其中Lp(mm)是孔径光阑和放大侧光瞳之间的距离,并且f(mm)是光学系统的焦距。
5.如权利要求1所述的光学系统,
其中满足以下条件表达式(6),
0.0≤Dc/f≤0.1 (6)
其中,在满足条件表达式(1)的所述多个折射表面中的最接近放大侧的折射表面的曲率中心与另一个折射表面的曲率中心之间的距离是Dc(mm),并且光学系统的焦距是f(mm)。
6.如权利要求1所述的光学系统,
其中满足条件表达式(1)的所述多个折射表面包括具有负焦度的折射表面,并且以下条件表达式(7)被满足,
φl/φ≤-0.27 (7)
其中负焦度为φl并且光学系统的焦度为φ。
7.如权利要求1所述的光学系统,
其中后组包括朝放大侧凹入并满足条件表达式(1)的折射表面,
并且其中满足以下条件表达式(8),
-0.2≤(D1+D2)/f≤0.2 (8)
其中,被包括在前组中的折射表面的曲率中心与孔径光阑之间的距离是D1(mm),被包括在后组中的折射表面的曲率中心与孔径光阑之间的距离是D2(mm),并且光学系统的焦距为f(mm)。
8.如权利要求1所述的光学系统,
其中后组的焦度大于前组的焦度。
9.如权利要求1所述的光学系统,
其中最靠近孔径光阑的光学表面具有负焦度。
10.一种成像装置,包括:被构造为对物体成像的成像设备,以及被构造为在成像设备的成像表面上对物体成像的光学系统,所述光学系统是根据如权利要求1至4和5至9中任一项所述的光学系统。
11.如权利要求10所述的成像装置,
其中成像表面的中心相对于光学系统的光轴偏心。
12.如权利要求10所述的成像装置,
其中成像表面是平面表面。
13.如权利要求10所述的成像装置,
其中,在包括光轴并且垂直于第一横截面的第二横截面中的视场角小于在包括光轴的第一横截面中的视场角。
14.如权利要求13所述的成像装置,
其中,在第二横截面中,成像表面仅接收从相对于光轴与成像设备相对的一侧进入光学系统的光通量。
15.如权利要求13所述的成像装置,
其中,向孔径光阑提供椭圆形孔,其中孔的长轴平行于第一横截面,并且孔的短轴平行于第二横截面。
16.一种车载相机系统,包括:被构造为获得物体的图像数据的成像装置,以及被构造为基于图像数据来获得到物体的距离信息的距离计算单元,所述成像装置是根据如权利要求10所述的成像装置。
17.如权利要求16所述的车载相机系统,还包括:被构造为基于距离信息来确定车辆与物体碰撞的可能性的碰撞确定单元。
18.如权利要求17所述的车载相机系统,还包括:控制设备,所述控制设备被构造为在已经确定存在车辆与物体碰撞的可能性的情况下输出控制信号以在车辆的车轮处生成制动力。
19.如权利要求17所述的车载相机系统,还包括警告设备,所述警告设备被构造为在已经确定存在车辆与物体碰撞的可能性的情况下向车辆的驾驶员发出警告。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-042686 | 2016-03-04 | ||
| JP2016042686A JP6746328B2 (ja) | 2016-03-04 | 2016-03-04 | 光学系、それを備える撮像装置及び投影装置 |
| PCT/JP2017/007614 WO2017150485A1 (ja) | 2016-03-04 | 2017-02-28 | 光学系、それを備える撮像装置及び投影装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108780214A CN108780214A (zh) | 2018-11-09 |
| CN108780214B true CN108780214B (zh) | 2020-12-25 |
Family
ID=59744038
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201780015021.2A Active CN108780214B (zh) | 2016-03-04 | 2017-02-28 | 光学系统以及具有该光学系统的成像装置和投影装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11131838B2 (zh) |
| EP (1) | EP3486703A4 (zh) |
| JP (1) | JP6746328B2 (zh) |
| CN (1) | CN108780214B (zh) |
| WO (1) | WO2017150485A1 (zh) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7086572B2 (ja) * | 2017-11-17 | 2022-06-20 | キヤノン株式会社 | 光学系、撮像装置、測距装置、車載システム、および移動装置 |
| JP2019090987A (ja) * | 2017-11-17 | 2019-06-13 | キヤノン株式会社 | 光学系、撮像装置、測距装置、および車載カメラシステム |
| CN110780434B (zh) | 2018-07-27 | 2022-04-05 | 精工爱普生株式会社 | 投射光学系统和投射型图像显示装置 |
| JP7183608B2 (ja) * | 2018-07-27 | 2022-12-06 | セイコーエプソン株式会社 | レンズおよび投写型画像表示装置 |
| JP7124521B2 (ja) | 2018-07-30 | 2022-08-24 | セイコーエプソン株式会社 | 投写光学系および投写型画像表示装置 |
| DE102019100904A1 (de) * | 2019-01-15 | 2020-07-16 | HELLA GmbH & Co. KGaA | Beleuchtungsvorrichtung sowie Lichtmodul |
| JP6656438B1 (ja) * | 2019-01-30 | 2020-03-04 | キヤノン株式会社 | 光学装置、それを備える車載システム及び移動装置 |
| JP7331385B2 (ja) * | 2019-03-05 | 2023-08-23 | セイコーエプソン株式会社 | 光学素子および投写型画像表示装置 |
| CN109974583B (zh) * | 2019-04-11 | 2024-03-26 | 南京信息工程大学 | 一种非接触光学元件表面面形测量装置及方法 |
| JP7342681B2 (ja) | 2019-12-19 | 2023-09-12 | セイコーエプソン株式会社 | レンズユニット、投写光学系、およびプロジェクター |
| JP7127634B2 (ja) | 2019-12-19 | 2022-08-30 | セイコーエプソン株式会社 | 投写光学系およびプロジェクター |
| JP2021117276A (ja) | 2020-01-23 | 2021-08-10 | セイコーエプソン株式会社 | 投写光学系、およびプロジェクター |
| JP2021117279A (ja) | 2020-01-23 | 2021-08-10 | セイコーエプソン株式会社 | 投写光学系およびプロジェクター |
| JP7459523B2 (ja) | 2020-01-23 | 2024-04-02 | セイコーエプソン株式会社 | 投写光学系およびプロジェクター |
| JP7380246B2 (ja) | 2020-01-23 | 2023-11-15 | セイコーエプソン株式会社 | 投写光学系、およびプロジェクター |
| JP7363518B2 (ja) | 2020-01-24 | 2023-10-18 | セイコーエプソン株式会社 | 投写光学系およびプロジェクター |
| JP7424072B2 (ja) | 2020-01-24 | 2024-01-30 | セイコーエプソン株式会社 | 投写光学系、およびプロジェクター |
| JP7120259B2 (ja) | 2020-01-24 | 2022-08-17 | セイコーエプソン株式会社 | 投写光学系、およびプロジェクター |
| JP2022040639A (ja) | 2020-08-31 | 2022-03-11 | セイコーエプソン株式会社 | 光学系、プロジェクター、および撮像装置 |
| JP2022040640A (ja) | 2020-08-31 | 2022-03-11 | セイコーエプソン株式会社 | 光学系、プロジェクター、および撮像装置 |
| JP7528644B2 (ja) | 2020-08-31 | 2024-08-06 | セイコーエプソン株式会社 | レンズ、光学系、プロジェクター、および撮像装置 |
| JP7537198B2 (ja) | 2020-09-15 | 2024-08-21 | セイコーエプソン株式会社 | 光学装置、プロジェクターおよび撮像装置 |
| JP7187590B2 (ja) * | 2021-01-27 | 2022-12-12 | キヤノン株式会社 | 光学系、撮像装置、車載システムおよび移動装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10161019A (ja) * | 1996-11-27 | 1998-06-19 | Olympus Optical Co Ltd | 結像光学系 |
| JP4345232B2 (ja) * | 1998-12-25 | 2009-10-14 | 株式会社ニコン | 反射屈折結像光学系および該光学系を備えた投影露光装置 |
| JP2002189172A (ja) * | 2000-08-08 | 2002-07-05 | Olympus Optical Co Ltd | 光学装置 |
| JP2003116029A (ja) * | 2001-10-04 | 2003-04-18 | Minolta Co Ltd | 撮像装置及びこの撮像装置を用いた画像記録装置 |
| JP4513691B2 (ja) * | 2005-08-23 | 2010-07-28 | 株式会社デンソー | 撮像モジュール |
| JP2008249838A (ja) * | 2007-03-29 | 2008-10-16 | Mitsubishi Electric Corp | 結像光学系 |
| JP2009145541A (ja) * | 2007-12-13 | 2009-07-02 | Panasonic Corp | カメラ装置 |
| JP5185744B2 (ja) | 2008-05-12 | 2013-04-17 | オリンパス株式会社 | 光学系及びそれを用いた内視鏡 |
| JP5459768B2 (ja) * | 2009-10-28 | 2014-04-02 | 京セラ株式会社 | 被写体距離推定装置 |
| US9104018B2 (en) * | 2012-03-30 | 2015-08-11 | Canon Kabushiki Kaisha | Imaging apparatus having a curved image surface |
| JP5921288B2 (ja) | 2012-03-30 | 2016-05-24 | キヤノン株式会社 | 撮像装置 |
| JP2014174390A (ja) * | 2013-03-11 | 2014-09-22 | Olympus Medical Systems Corp | 結像光学系、立体撮像装置、及び内視鏡 |
| JP2017156712A (ja) * | 2016-03-04 | 2017-09-07 | キヤノン株式会社 | 光学系、それを備える撮像装置及び投影装置 |
-
2016
- 2016-03-04 JP JP2016042686A patent/JP6746328B2/ja active Active
-
2017
- 2017-02-28 EP EP17759951.1A patent/EP3486703A4/en not_active Withdrawn
- 2017-02-28 WO PCT/JP2017/007614 patent/WO2017150485A1/ja active Application Filing
- 2017-02-28 CN CN201780015021.2A patent/CN108780214B/zh active Active
-
2018
- 2018-08-29 US US16/116,737 patent/US11131838B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017150485A1 (ja) | 2017-09-08 |
| EP3486703A4 (en) | 2020-09-02 |
| CN108780214A (zh) | 2018-11-09 |
| EP3486703A1 (en) | 2019-05-22 |
| JP2017156714A (ja) | 2017-09-07 |
| US11131838B2 (en) | 2021-09-28 |
| US20190011684A1 (en) | 2019-01-10 |
| JP6746328B2 (ja) | 2020-08-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108780214B (zh) | 光学系统以及具有该光学系统的成像装置和投影装置 | |
| WO2017150486A1 (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| WO2017150493A1 (ja) | 撮像装置及び投影装置 | |
| CN109307929B (zh) | 带折射面和反射面的光学系统与图像拍摄装置和投影装置 | |
| EP4036626B1 (en) | Wide-angle imaging lens | |
| US10908402B2 (en) | Image pickup apparatus including optical system having refractive surface and reflection surface, and on-board system and moving device provided with same | |
| JP2019090996A (ja) | 光学系、撮像装置、測距装置、および車載カメラシステム | |
| EP4036625B1 (en) | Optical system, image pickup apparatus, in-vehicle system, and moving apparatus | |
| JP2019028127A (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| US20190033566A1 (en) | Optical system including refractive surface and reflective surface, and imaging apparatus and projection apparatus including the same | |
| WO2017150492A1 (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP2018189747A (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP6983584B2 (ja) | 撮像装置、それを備える測距装置及び車載カメラシステム | |
| JP7379112B2 (ja) | 光学系及びそれを備える撮像装置 | |
| US20230296881A1 (en) | Optical system including cemented lenses, imaging apparatus including the same, and moving apparatus including the same | |
| EP4246200A1 (en) | Optical system including negative lens and positive lens, imaging apparatus including the same, in-vehicle system including the same, and moving apparatus including the same | |
| JP2020003736A (ja) | 撮像装置、それを備える移動装置及び測距装置 | |
| JP2019045819A (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP2019090995A (ja) | 光学系、撮像装置、測距装置、および車載カメラシステム | |
| JP2023037276A (ja) | 光学系、撮像装置、車載システム、および移動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |