CN102736372A - 相机 - Google Patents
相机 Download PDFInfo
- Publication number
- CN102736372A CN102736372A CN2012101021294A CN201210102129A CN102736372A CN 102736372 A CN102736372 A CN 102736372A CN 2012101021294 A CN2012101021294 A CN 2012101021294A CN 201210102129 A CN201210102129 A CN 201210102129A CN 102736372 A CN102736372 A CN 102736372A
- Authority
- CN
- China
- Prior art keywords
- mirror
- secondary mirror
- evener
- primary
- contact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B19/00—Cameras
- G03B19/02—Still-picture cameras
- G03B19/12—Reflex cameras with single objective and a movable reflector or a partly-transmitting mirror
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Cameras In General (AREA)
- Studio Devices (AREA)
Abstract
相机。该相机包括镜接触构件。镜接触构件包括第一偏心部和第二偏心部,第一偏心部相对于镜接触构件的转动中心偏心,第二偏心部相对于镜接触构件的转动中心以与第一偏心部的偏心量相同的偏心量偏心。当镜被移位到镜下降状态时,镜与第一偏心部接触。跳动限制构件被布置成能绕第二偏心部转动。
Description
技术领域
本发明涉及诸如单镜头反光相机等相机(camera),更特别地,涉及包括抑制可转动镜的跳动(回弹)的机构的相机。
背景技术
单镜头反光相机包括主镜和副镜,其中主镜用于反射来自被摄体的光并将被反射的光导向取景器的光学系统,副镜用于将已经透过主镜的光导向焦点检测器。主镜和副镜均能移位到镜下降状态和镜上升状态,其中在镜下降状态中,两个镜都位于摄影用光路中,在镜上升状态中,两个镜都从摄影用光路退避。
当主镜和副镜移位到镜下降状态时,主镜和副镜碰撞布置于镜盒的止动件,由此导致主镜和副镜跳动(回弹离开止动件)。通过抑制主镜的跳动能使取景器图像稳定。另外,通过抑制副镜的跳动能够较早地开始焦点检测操作。
日本特开平9-203972号公报公开了下述技术。
主镜1和主镜保持框架2被移位到镜下降状态并且与处于观察位置的主镜接收构件29碰撞。当主镜1和主镜保持框架2与主镜接收构件29碰撞时,惯性制动板21和主镜接收构件29转动。与惯性制动板21和主镜接收构件29的转动连动地,副镜保持构件31转动以进入副镜11的跳动轨迹中。结果,副镜保持构件31的副镜保持部32与副镜11接触,从而减小副镜11的跳动。
发明内容
利用日本特开平9-203972号公报中公开的技术,当主镜1和主镜保持框架2与主镜接收构件29碰撞时,主镜1和主镜保持框架2的动量被传递到惯性制动板21和主镜接收构件29。
然而,在日本特开平9-203972号公报中,副镜并不包括如为主镜所设置的跳动抑制机构那样的跳动抑制机构,并且仅限制副镜的跳动范围。另外,当调节镜的镜下降位置时,镜跳动范围被改变。
本发明的实施方式提供一种相机,该相机包括:镜(mirror);镜接触构件,所述镜能与所述镜接触构件接触;以及跳动限制构件,其包括跳动限制部,当所述镜从所述镜接触构件跳动时,所述镜能与所述跳动限制部接触,其中,所述镜接触构件被设置成能绕转动中心转动,所述镜接触构件包括第一偏心部和第二偏心部,所述第一偏心部相对于所述镜接触构件的所述转动中心偏心,所述第二偏心部相对于所述镜接触构件的所述转动中心以与所述第一偏心部的偏心量相同的偏心量偏心,当所述镜被移位到镜下降状态时,所述镜与所述第一偏心部接触,所述跳动限制构件被布置成能绕所述第二偏心部转动。
根据本发明的实施方式,能够获得包括如下镜驱动机构的相机:在该镜驱动机构中,当调节镜的镜下降位置时,镜跳动范围不会被改变。
从下面参照附图对示例性实施方式的说明,本发明的其他特征将变得明显。
附图说明
图1是示出根据本发明的实施方式的相机的整体构造的示意图。
图2A至图2C是用于说明镜驱动机构的操作的说明图。
图3是用于说明镜驱动顺序的图。
图4是示出主镜平衡器的构造和副镜平衡器的构造的说明图。
图5A和图5B是用于说明主镜平衡器的操作和副镜平衡器的操作的说明图。
图6是示出位于副镜框架左侧的副镜平衡器机构的分解立体图。
图7是用于说明位于副镜框架左侧的副镜平衡器机构的操作的说明图。
图8A和图8B是用于说明位于副镜框架左侧的副镜平衡器机构的操作的说明图。
图9是快门装置的主视图。
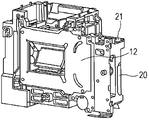
图10A至图10C是示出镜盒的详细结构的说明图。
具体实施方式
下面将参照附图说明根据本发明的实施方式的相机。根据本实施方式的相机被实施为使用卤化银胶片的单镜头反光静态相机或实施为使用CCD传感器或MOS型固态摄像元件(imagepickup element)的单镜头反光数字式相机。
图1是示出根据本实施方式的单镜头反光数字式相机的内部整体构造的示意图。
在图1中,摄影透镜10被可拆装地安装到数字式相机的主体。被摄体像被摄影透镜10聚焦于成像面(image plane)。尽管未示出,摄影透镜10由透镜驱动器、曝光控制用的光圈叶片单元、用于驱动光圈叶片单元的光圈驱动器等构成。
主镜100被构成为半透半反镜(half mirror)。当主镜100处于镜下降状态时,主镜100将由摄影透镜10聚焦的被摄体像朝向调焦屏反射。此时,主镜100允许被摄体像的一部分朝向副镜200透过主镜100。副镜200朝向焦点检测器11反射被摄体像(光)的已经透过主镜100的部分。
主镜100由镜驱动机构(后面说明)驱动,使得主镜100移位到镜下降状态或镜上升状态,其中在镜下降状态,主镜100位于被摄体光束的光路中,从而将被摄体像导向调焦屏,在镜上升状态,主镜100从被摄体光束的光路退避,从而将被摄体像导向摄像元件13。
当主镜100被镜驱动机构(后面说明)驱动时,副镜200与主镜100连动地移位。更具体地,当主镜100处于镜下降状态时,副镜200将已经透过主镜100的光束导向(指向)焦点检测器11。另一方面,当主镜100处于镜上升状态时,副镜200与主镜100一起从被摄体光束的光路退避。
五棱镜14在将聚焦于调焦屏的被摄体像转换成正立正像之后反射该被摄体像。
目镜透镜15将已经被五棱镜14转换成正立正像并反射的被摄体像导向摄影者的眼睛。
测光装置16经由五棱镜14测量已经被聚焦于调焦屏的被摄体像的亮度。根据测光装置16的输出信号进行曝光期间的曝光控制。
焦点检测器11检测被摄体像的离焦量。根据焦点检测器11的输出信号控制摄影透镜10用的透镜驱动器,由此进行焦点调节。
快门装置12机械地控制被摄体光束到成像面的入射。
摄像元件13拍摄由摄影透镜10聚焦的被摄体像并且将该被摄体像转换成电信号。例如,CCD或MOS型二维摄像器件被用作摄像元件13。
下面将说明根据本实施方式的数字式相机中的摄影操作。
在开始摄影之前,使经由摄影透镜10入射的被摄体像处于摄影者能够经由目镜透镜15确认由主镜100和五棱镜14定向的被摄体像的状态。此时,被摄体像的一部分经由副镜200入射到焦点检测器11。当摄影者操作开关时,根据焦点检测器11所检测的被摄体距离信息驱动摄影透镜10。以上述方式,能够进行调焦。另外,测光装置16测量被摄体亮度,由此确定透镜光圈值和快门曝光时间。
当利用摄影者的释放操作进行摄影时,主镜100和副镜200从摄影用光路向上退避并且快门装置12的叶片打开,由此使被摄体像入射到摄像元件13。在经过适当的曝光时间之后,快门装置12的叶片被操作以关闭图像框架(image frame)的开口,并且主镜100和副镜200返回到摄影用光路中。由此完成摄影操作。
下面将参照图2A至图2C说明镜驱动机构的操作。
图2A示出释放之前的待机状态、即镜下降和加载操作完成之后的状态。
安装有镜驱动机构的基板300包括嵌合主镜100的转轴101的孔以及主镜100的驱动轴102转动所沿着的弧形孔。用于沿向下方向对主镜100施力的镜下降弹簧100Sp被保持为抵靠主轴100的驱动轴102。
镜杆310绕转动中心310d转动。下弯钩杆340被安装到镜杆310。下弯钩杆340绕转动中心340a转动。吸引杆370和分离杆360彼此成为一体并且两者均绕分离杆360的转动中心360a转动。能被电磁体380吸引的吸引部380a被固定到吸引杆370的末端。
电磁体380包括磁体、线圈和磁轭。在未通电的状态下,吸引部380a通过磁力被保持为与磁轭紧密接触。当线圈被通电时,磁力被消除,从而吸引部380a与磁轭分离。
分离弹簧360Sp沿使吸引部380a与磁轭分离的方向对吸引部380a施力。换言之,分离弹簧360Sp沿使吸引杆370绕分离杆360的转动中心360a向图2A中观察到的右方转动的方向对吸引杆370施力。当吸引部380a被吸引到磁轭时,吸引部380a被比分离弹簧360Sp的施力大的力保持于磁轭。
如图2A所示,在释放之前的待机状态下,上弯钩杆350与镜杆310的接合部310a彼此接合。利用该接合,镜杆310抵抗镜上升弹簧310Sp的施力而被保持在图2A所示的状态。另外,在图2A所示的状态中,下弯钩杆340和镜驱动杆320的接合部320a彼此接合。
下面将说明镜上升操作。
当根据释放信号将脉冲供给到电磁体380时,固定有吸引部380a的吸引杆370以及与吸引杆370成为一体的分离杆360由于分离弹簧360Sp的弹簧力而绕分离杆360的转动中心360a向左(逆时针)转动。
当分离杆360向左转动时,分离杆360的辊360b与上弯钩杆350的接触部350b接触,因此上弯钩杆350绕转动中心350a向左转动。在上弯钩杆350向左转动的情况下,上弯钩杆350与镜杆310的接合部310a之间的接合被解除。
当上弯钩杆350与镜杆310的接合部310a之间的接合被解除时,镜杆310由于镜上升弹簧310Sp的弹簧力而绕转动中心310d向左转动。此时,因为镜驱动杆320的接合部320a与下弯钩杆340接合,所以镜驱动杆320绕镜杆310的转动中心310d向左转动。在镜驱动杆320向左转动的情况下,镜驱动杆320的凸轮部320b向上推主镜的驱动轴102,由此进行镜上升操作。
镜上升弹簧310Sp的弹簧力充分地大于镜下降弹簧100Sp的弹簧力。因此,能够高速地进行镜上升操作。
图2B示出镜上升操作完成之后的状态。
操作传感器330被固定到镜驱动杆320,并且由包括光断路器的上升开关(UPSW)303检测镜上升操作的完成。
镜杆310包括吸引凸轮部310b。当镜杆310向左转动时,吸引凸轮部310b与分离杆360的辊360c接触,由此使分离杆360抵抗分离弹簧360Sp的弹簧力而向右(顺时针)转动。在分离杆360向右转动的情况下,处于与电磁体380分离的状态的吸引部380a再次被吸引到电磁体380。
另外,因为镜驱动杆320的接合部320a与下弯钩杆340接合,所以下弯钩杆340与镜杆310以及镜驱动杆320一起绕镜杆310的转动中心310d向左转动。下弯钩杆340的解除部340b移动到能够与分离杆360的辊360b接触的位置。在随着镜上升操作而产生的跳动结束之后,进行曝光操作,在曝光操作之后进程前进到镜下降步骤。
下面将说明镜下降操作。
当在图2B的镜上升状态下将脉冲供给到电磁体380时,均与吸引部380a关联的吸引杆370和分离杆360由于分离弹簧360Sp的弹簧力而向左(逆时针)转动。
当分离杆360向左转动时,分离杆360的辊360b与下弯钩杆340的解除部340b接触,从而下弯钩杆340绕转动中心340a向右(顺时针)转动。在下弯钩杆340向右转动的情况下,下弯钩杆340与镜驱动杆320的接合部320a之间的接合被解除。当下弯钩杆340与镜驱动杆320的接合部320a之间的接合被解除时,导致镜下降弹簧100Sp的弹簧力作用于主镜的驱动轴102。结果,镜驱动杆320绕镜杆310的转动中心310d向右转动。
图2C示出镜下降操作完成之后的状态。
主镜平衡器400被布置于镜盒的基板300。当主镜100与主镜平衡器400接触时,主镜平衡器400抵抗主镜平衡器弹簧400Sp的弹簧力而向右转动,由此缓和随着主镜100的镜下降操作而产生的冲击。此外,主镜平衡器400在向右转动时碰撞位于主镜平衡器400的前端处的缓冲部302,由此进一步缓和施加于主镜平衡器400的冲击。
副镜平衡器500被布置于镜盒的基板300。当副镜200与副镜平衡器500接触时,副镜平衡器500抵抗副镜平衡器弹簧500Sp(参见图5A和图6)的弹簧力而向右转动,由此缓和随着副镜200的镜下降操作而产生的冲击。
下面将说明镜加载操作。
在图2C的状态下,布置于镜杆310的加载部的辊310c被加载杆(未示出)向左压,由此镜杆310抵抗镜上升弹簧310Sp的弹簧力而绕镜杆310的转动中心310d向右转动。在镜杆310向右转动的情况下,镜杆310的吸引凸轮部310b与分离杆360的辊360c接触,由此分离杆360抵抗分离弹簧360Sp的弹簧力而向右转动。
在分离杆360向右转动的情况下,吸引杆370也向右转动,从而处于分离状态的吸引部380a再次被吸引到电磁体380。
当在图2C的状态下镜杆310向右转动时,下弯钩杆340与镜驱动杆320的接合部320a接合,并且上弯钩杆350与镜杆310的接合部310a接合。结果,完成镜加载操作并且镜驱动机构返回到图2A的状态。
虽然在本实施方式中,如上所述,电磁体被用作开始镜上升操作和镜下降操作用的触发器并且弹簧被用作镜上升操作和镜下降操作用的驱动源,但是,镜驱动机构不限于上述配置。例如,电磁马达、步进马达或超声马达也可以用作镜驱动机构中的驱动源。
然而,当电磁马达用于进行镜操作时,操作开始时间由于例如马达的惯性和温度特性等而趋于变化。另外,需要减速机构并且在传递驱动力时产生机械延迟时间。因此,如上述实施方式那样,在需要高速和高精度的镜驱动机构中,采用电磁体作为触发器并且使用弹簧力来进行镜操作是恰当的。
图3是说明根据本实施方式的相机的镜驱动顺序(sequence)的图。在根据本实施方式的相机的镜驱动顺序中,如图3所示,在完成镜下降操作之前开始加载操作。因此,即使在AF(自动调焦)和AE(自动曝光)用的算术运算期间,也能够不管使镜停止的精度而持续加载操作。另外,加载操作的变化不影响镜操作速度以及AF和AE用的算术运算时间。这种变化对连续拍摄的影响也小。
下面将参照图4、图5A和图5B说明主镜平衡器400和410的构造以及副镜平衡器500和510的构造。
用于保持主镜100的主镜框架100a具有铰接(hinge)轴部(转轴)101,所述铰接轴部101分别形成于主镜框架100a的左右侧并且用作转动中心。用于使主镜100转动的驱动轴102形成于主镜框架100a的一侧。由与主镜框架100a不同的构件形成的接触板103和104相应地布置于主镜100的左右末端。
主镜框架100a在很多情况下由诸如铝或树脂等轻质材料制成以减小惯性矩。如果接触板103和104由与主镜框架100a的材料相同的材料制成,则接触板103和104的耐久性可能会劣化。因此,接触板103和104由诸如不锈钢等具有比主镜框架100a的材料的强度高的强度的材料制成,或由具有冲击吸收性能的橡胶构件形成。
如图4和图5A所示,主镜平衡器400布置于主镜框架100a的左侧(一侧)。主镜平衡器400包括用作转动中心的轴部401、接触轴402、主镜角度调节部403以及平衡器配重404,该平衡器配重404由诸如黄铜等具有大质量的材料制成。
如图4和图5B所示,主镜平衡器410布置于主镜框架100a的右侧(另一侧)。主镜平衡器410包括用作转动中心的轴部411、接触轴412、主镜角度调节部413以及平衡器配重414,该平衡器配重414由诸如黄铜等具有大质量的材料制成。
在镜下降状态中,主镜角度调节部403通过弹簧400Sp的弹簧力而与调节构件301接触。另外,接触轴402与主镜100的接触板103接触的状态由镜下降弹簧100Sp的弹簧力保持。类似地,在镜下降状态中,主镜角度调节部413通过弹簧410Sp的弹簧力而与调节构件420接触。另外,接触轴412与主镜100的接触板104接触的状态由镜下降弹簧100Sp的弹簧力保持。
调节构件301具有偏心轴。因此,通过利用工具使调节构件301转动,主镜平衡器400绕轴部401转动,由此接触轴402与主镜100的接触板103之间的接触位置被改变。
类似地,调节构件420具有偏心轴。因此,通过利用工具使调节构件420转动,主镜平衡器410绕轴部411转动,由此接触轴412与主镜100的接触板104之间的接触位置被改变。
以所述方式,能够调节主镜框架100a绕铰接轴部101的角度以及主镜框架100a的在左右方向上的倾斜。
副镜200以能绕位于主镜框架100a的侧面的转动中心转动的方式由副镜框架200a保持。接触部201和202相应地形成于副镜框架200a的左右侧。
如图4和图5A所示,副镜平衡器500布置于副镜框架200a的左侧(一侧)。副镜平衡器500包括用作副镜平衡器500用的转动中心的轴部501、接触轴502、调节部503以及副镜锁定杆504,该副镜锁定杆504设置有锁定销505。接触轴502用作镜接触构件,副镜锁定杆504用作跳动限制构件,副镜平衡器500用作转动构件。
在镜下降状态中,副镜平衡器500的调节部503通过弹簧500Sp的弹簧力而与调节构件313接触。弹簧500Sp用作施力构件。接触轴502与副镜框架200a的接触部201接触的状态由副镜弹簧(未示出)的弹簧力保持。
如图4和图5B所示,副镜平衡器510布置于副镜框架200a的右侧(另一侧)。副镜平衡器510包括用作副镜平衡器510用的转动中心的轴部511、接触轴512、调节部513以及副镜锁定杆514,该副镜锁定杆514设置有锁定销515。接触轴512用作镜接触构件,副镜锁定杆514用作跳动限制构件,副镜平衡器510用作转动构件。
在镜下降状态中,副镜平衡器510的调节部513通过弹簧510Sp的弹簧力而与调节构件520接触。弹簧510Sp用作施力构件。接触轴512与副镜框架200a的接触部202接触的状态由副镜弹簧(未示出)的施力保持。
在图4和图5A所示的位于副镜框架200a左侧的平衡器机构中,与副镜框架200a的接触部201接触的接触轴502具有偏心轴。换言之,接触轴502以能转动的方式安装到副镜平衡器500,但是接触轴502的转动中心偏离接触轴502的外周部502a(参见图6)的中心。因此,特别地,外周部502a的距转动中心的半径(距离)以一侧的最大半径比相反侧的最大半径长的方式变化。
因此,通过使接触轴502相对于副镜平衡器500转动,接触轴502的外周部502a与副镜框架200a的接触部201之间的接触位置被改变。利用所述机构,能够调节处于镜下降状态的副镜200的角度。
另外,副镜锁定杆504能相对于接触轴502的圆筒部502b(参见图6)转动。如接触轴502的外周部502a那样,圆筒部502b相对于接触轴502的转动中心偏心。接触轴502的外周部502a用作第一偏心部,接触轴502的圆筒部502b用作第二偏心部。
因此,即使当通过使接触轴502相对于副镜平衡器500转动而调节副镜200的角度时,副镜200的跳动将要结束所处于的间隙的尺寸不改变。换言之,跳动限制范围不根据副镜200的镜下降位置而改变。
在图4和图5B所示的位于副镜框架200a右侧的平衡器机构中,与副镜框架200a的接触部202接触的接触轴512被形成为不能相对于副镜平衡器510转动的轴。调节构件520具有偏心圆筒部520a,偏心圆筒部520a相对于调节构件520的转动中心偏心。副镜平衡器510的调节部513与偏心圆筒部520a接触。
因此,通过使调节构件520转动,副镜平衡器510绕轴部511转动,并且接触轴512与副镜框架200a的接触部202之间的接触位置被改变。利用所述机构,能够调节处于镜下降状态的副镜200的角度。
另外,副镜锁定杆514能相对于接触轴512转动。因此,即使当通过使调节构件520转动而改变接触(定位)轴512与副镜框架200a的接触(定位)部202之间的接触位置时,锁定销515与副镜框架200a的接触部202之间的间隙的尺寸也不改变。
由此,即使当通过使调节构件520转动而调节副镜200的角度时,副镜200的跳动将要结束所处于的间隙的尺寸也不改变。换言之,跳动状态不根据副镜200的镜下降位置而改变。
在本实施方式中,位于主镜100和副镜200左右侧的平衡器机构的结构和形状彼此不同。在本实施方式中位于副镜框架200a右侧的平衡器机构可以设置于副镜框架200a的左侧,并且在本实施方式中位于副镜框架200a左侧的平衡器机构可以设置于副镜框架200a的右侧。
另外,在本实施方式中,用作主镜平衡器400的转轴的轴部401和用作主镜平衡器410的转轴的轴部411以同轴的关系配置。换言之,主镜平衡器400和主镜平衡器410被配置为使得轴部401和轴部411被同轴地定位。
用作副镜平衡器500的转轴的轴部501和用作副镜平衡器510的转轴的轴部511以同轴的关系配置。换言之,副镜平衡器500和副镜平衡器510被配置为使得轴部501和轴部511被同轴地定位。
利用所述配置,较容易设计使得主镜100左右侧的主镜平衡器400和410的惯性矩彼此相等的镜驱动机构。还较容易设计使得左右侧的副镜平衡器500和510的惯性矩彼此相等的镜驱动机构。
而且,即使当使得主镜100左右侧的两个主镜平衡器的惯性矩彼此不同时,或者即使当使得副镜200左右侧的两个副镜平衡器的惯性矩彼此不同时,也能够容易地确定惯性矩之间的差。
图6是示出图4中的位于副镜框架200a的左侧的平衡器机构的细节的分解立体图。
接触轴502包括与副镜框架200a的接触部201接触的(偏心)外周部502a、以及插入并贯穿副镜锁定杆504的接合孔504a的(偏心)圆筒部502b。外周部502a相对于接触轴502的转动中心的偏心量基本上等于接触轴502的圆筒部502b相对于接触轴502的转动中心的偏心量。因此,外周部502a的距转动中心的半径的变化与圆筒部502b的距转动中心的半径的变化基本上相同,使得外周部502a的距转动中心的半径最大的点与圆筒部502b的距转动中心的半径最大的点在转动轴线的方向上排列。因此,在特别的实施方式中,外周部502a与圆筒部502b优选地是同轴安装的、直径基本上相同的圆筒部,并且对于外周部502a和圆筒部502b而言,转动中心与几何中心的错开量基本上相同。
如图6所示,副镜锁定杆504、垫圈W1、副镜平衡器500以及垫圈W2被顺次安装到接触轴502,并且接触轴502的末端被弯边(crimped)。因此,副镜锁定杆504被保持在接触轴502和副镜平衡器500之间。在该状态下,接触轴502的圆筒部502b与副镜锁定杆504的接合孔504a的内周面接触。
由于垫圈W1被配置在副镜锁定杆504和副镜平衡器500之间,所以副镜锁定杆504能绕圆筒部502b平滑地转动。另外,由于如图6中所观察的那样垫圈W2被配置在副镜平衡器500的右侧,所以,即使在接触轴502的末端被弯边之后,接触轴502也能相对于副镜平衡器500转动。
扭力螺旋弹簧500Sp被配置于副镜平衡器500的轴部501,轴部501用作副镜平衡器500的转动中心。扭力螺旋弹簧500Sp的可动端被保持为抵靠固定到锁定杆504的锁定销505,锁定杆504能绕作为转动中心的接触轴502转动。
由此,通过扭力螺旋弹簧500Sp的弹簧力而对副镜锁定杆504施力。
接触轴502的末端被形成为有槽的形状(参见例如图7)。通过将诸如改锥等工具插入形成于接触轴502的末端的槽中并且通过使接触轴502转动来调节副镜200的角度。
下面将参照图7、图8A和图8B说明在图4中位于副镜框架200a左侧的平衡器机构的操作。
如上所示,扭力螺旋弹簧500Sp被布置于用作副镜平衡器500的转动中心的轴部501。扭力螺旋弹簧500Sp的固定端被保持为抵靠固定部(未示出),并且扭力螺旋弹簧500Sp的可动端被保持为抵靠固定到锁定杆504的锁定销505。
扭力螺旋弹簧500Sp的弹簧力由图7中的力F表示。根据锁定销505与扭力螺旋弹簧500Sp的可动端之间的接触角度,力F被分解成(解析成)与副镜锁定杆504的转动方向垂直的方向上的分力F1以及与分力F1正交的方向上的分力F2。扭力螺旋弹簧500Sp被设为使得分力F1比分力F2大,即F1>F2,其中分力F1作用为使副镜平衡器500转动的力,分力F2作用为使副镜锁定杆504转动的力。
分力F1在副镜框架200a的动能传递到副镜平衡器500时提供负载。由此,即使当副镜平衡器500的惯性矩不能被设定得太大时,副镜框架200a的碰撞能量也能够被扭力螺旋弹簧500Sp的弹簧力所提供的负载吸收。
分力F2是施加于副镜锁定杆504的弹簧力。分力F2不仅用于在锁定销505与副镜框架200a的接触部201接触时提供负载,而且还用于在副镜框架200a的接触部201在越过锁定销505之后从接触轴502回弹时使副镜锁定杆504返回到回弹限制位置。
图8A示出完成镜下降操作之前的状态、即紧接在锁定销505与副镜框架200a的接触部201接触之前的状态。当接触部201与锁定销505接触时,锁定销505转动,然后接触部201与接触轴502接触。
此时所产生的碰撞能量被转换成用于使副镜平衡器500转动的能量,从而副镜平衡器500如图8B所示地转动。锁定销505也与副镜平衡器500一起转动使得在副镜框架200a的接触部201回弹时锁定销505一直能实现回弹限制。
如果副镜平衡器500的外形尺寸增大,则可能发生与其他部件干涉的问题。考虑到该问题,副镜平衡器500形成为仅沿一个方向从用作副镜平衡器500的转动中心的轴部501延伸到调节部503的细长形状。由此,接触轴502能有效地用作平衡器配重。换言之,在一个实施方式中,由接触轴502与接触部201之间的接触点和调节部503与调节构件313之间的接触点相对于副镜平衡器500的转动中心所形成的角度被设为不大于90°。
当副镜200向镜下降状态移位时,副镜200在接近摄像面的方向上转动。因此,副镜平衡器500和510也在朝向摄像面的方向上移动。如图1所示,快门装置12被布置在摄像元件13的紧前方。由此,存在副镜平衡器500和510在平衡操作中可能会与快门装置12干涉的风险。
图9是快门装置12的主视图。如图9所示,凹部12b和12c形成于布置在快门装置12的被摄体侧的板,由此允许副镜平衡器500和510的移动。所述配置能够增大由副镜平衡器500和510所吸收的能量的量,并且能够提供吸收副镜200的跳动用的满意机构。凹部12b和12c可以呈孔形状,所述孔形状即使在形成为与摄影用开口12a连续时也能提供类似的有益效果。
图10A至图10C是示出镜盒的详细结构的说明图。图10A是镜盒的主视立体图,图10B是镜盒的后视立体图。图10C是示出图9所示的快门装置12被安装到镜盒的状态的后视立体图。
图2A至图2C所示的镜驱动机构被布置于镜盒的两侧,并且镜加载机构31和镜加载马达30被布置于镜驱动机构的一侧。
在本实施方式中,当从后侧看相机时,镜加载机构31和镜加载马达30关于光轴被布置在左侧,并且快门装置12和快门加载马达20被布置于光轴的右侧。
下面将说明用于调节主镜100和副镜200的方法。
对主镜100的转轴101进行定位,使得位于左侧的转轴101接合到形成于镜驱动机构的基板300的孔中并且位于右侧的转轴101嵌合到调节板105(参见图10B)。能够通过调节调节板105的位置来调节主镜100的位于右侧的转轴101的位置。
在上面的说明中,通过接触轴402与主镜100的接触板103接触以及通过接触轴412与主镜100的接触板104接触来确定主镜100的在其转动方向上的角度。然而,更精确地说,接触轴402与主镜100的接触板103之间的接触以及接触轴412与主镜100的接触板104之间的接触不同时发生。
换言之,当主镜100被移位到镜下降状态时,在建立接触轴402与主镜100的接触板103之间的接触和接触轴412与主镜100的接触板104的接触中的任一方时,尚未建立与另一方有关的接触板和接触轴之间的接触并且在该接触板和接触轴之间仍留有间隙。
更具体地,通过三个点处的接触确定平面。在本实施方式中,主镜100的在主镜100被移位到镜下降状态时的平面通过以下三个点处的接触确定:该三个点由支承主镜100的转轴101的两个轴承部、以及接触轴402和接触轴412中的一方提供。
在本实施方式中,使主镜100的接触板103在较早定时与接触轴402接触,其中接触板103被定位于左侧,在左侧不能进行主镜100的转轴101的位置的调节。之后,使主镜100的接触板104与接触轴412接触,其中接触板104被定位于右侧,在右侧能够根据调节板105的位置来进行主镜100的转轴101的位置的调节。
利用所述配置,能够以主镜100的转轴101被固定地保持的那侧为基准来调节主镜100的在主镜100的转动方向上的角度。如果以主镜100的转轴101可动的那侧为基准来调节主镜100的在主镜100的转动方向上的角度,这意味着以包括误差的那侧为基准来调节主镜100在主镜100的转动方向上的角度。换言之,与主镜100的转轴101的位置有关的误差影响主镜100的在主镜100的转动方向上的角度。
与上面的说明类似地,通过接触轴502与副镜框架200a的接触部201接触以及通过接触轴512与副镜框架200a的接触部202接触来确定副镜200的在副镜200的转动方向上的角度。
然而,更精确地说,接触轴502与副镜框架200a的接触部201之间的接触以及接触轴512与副镜框架200a的接触部202之间的接触不同时发生。换言之,当副镜200被移位到镜下降状态时,在建立接触轴502与副镜框架200a的接触部201之间的接触和接触轴512与副镜框架200a的接触部202之间的接触中的任一方时,尚未建立与另一方有关的接触板和接触轴之间的接触并且在该接触板和接触轴之间仍留有间隙。
在本实施方式中,副镜200的在副镜200被移位到镜下降状态时的平面通过以下三个点处的接触确定:该三个点由支承副镜200的转轴的两个轴承部、以及接触轴502和接触轴512中的一方提供。
在本实施方式中,接触轴512与副镜框架200a的接触部202接触,接触部202和接触轴512位于主镜100的右侧,在该右侧,主镜100的在其转动方向上的角度没有被固定地设定。另一方面,副镜框架200a的接触部201不与接触轴502接触,接触部201与接触轴502位于主镜100的左侧,在该左侧,主镜100的在其转动方向上的角度被固定地设定。
由此,在本实施方式中,当副镜200被移位到镜下降状态时用于限定副镜200的平面的机构以及当主镜100被移位到镜下降状态时用于限定主镜100的平面的机构被定位成对角关系。
在从主镜100与位于左侧的主镜平衡器400接触的定时到主镜100与位于右侧的主镜平衡器410接触的定时的时间段内,产生作用于主镜100以使主镜100倾斜的力。
类似地,在从副镜200与位于右侧的副镜平衡器510接触的定时到副镜200与位于左侧的副镜平衡器500接触的定时的时间段内,产生作用于副镜200以使副镜200倾斜的力。然而,由于作用于主镜100以使主镜100倾斜的力以及作用于副镜200以使副镜200倾斜的力彼此方向相反,所以提高了主镜100和副镜200的定位精度。
另外,在本实施方式中,主镜100首先与位于左侧的主镜平衡器400接触,然后与位于右侧的主镜平衡器410接触。另一方面,副镜200首先与位于右侧的副镜平衡器510接触,然后与位于左侧的副镜平衡器500接触。
结果,主镜100和副镜200被移位到镜下降状态时所产生的冲击能够被分散到左侧和右侧,并且能够在较短时间内结束冲击。
上面已经结合实施方式详细说明了本发明。已经结合单镜头反光数字式相机说明了本发明的实施方式,其中例如在该单镜头反光数字式相机中镜头是可更换的,但是本发明还能够被实施于以下结构:相机主体和镜头彼此成为一体并且镜头是不能更换的。
虽然已经参照示例性实施方式说明了本发明,但是应当理解的是本发明不限于所公开的示例性实施方式。所附的权利要求书的范围应符合最宽泛的解释,从而涵盖所有的变型、等同结构和功能。
Claims (4)
1.一种相机,其包括:
镜;
镜接触构件,所述镜能与所述镜接触构件接触;以及
跳动限制构件,其包括跳动限制部,当所述镜从所述镜接触构件跳动时,所述镜能与所述跳动限制部接触,
其中,所述镜接触构件被设置成能绕转动中心转动,
所述镜接触构件包括第一偏心部和第二偏心部,所述第一偏心部相对于所述镜接触构件的所述转动中心偏心,所述第二偏心部相对于所述镜接触构件的所述转动中心以与所述第一偏心部的偏心量相同的偏心量偏心,
当所述镜被移位到镜下降状态时,所述镜与所述第一偏心部接触,
所述跳动限制构件被布置成能绕所述第二偏心部转动。
2.根据权利要求1所述的相机,其特征在于,所述相机还包括:
转动构件,所述转动构件被配置成:当所述镜与所述镜接触构件彼此接触时,所述转动构件转动,
其中,所述镜接触构件和所述跳动限制构件以能转动的方式设置于所述转动构件。
3.根据权利要求2所述的相机,其特征在于,所述跳动限制构件被保持在所述镜接触构件和所述转动构件之间。
4.根据权利要求2或3所述的相机,其特征在于,所述相机还包括:
施力构件,所述施力构件被配置成对所述转动构件施力,
其中,所述施力构件沿与当所述镜与所述镜接触构件彼此接触时所述转动构件的转动方向相反的方向对所述转动构件施力,
所述施力构件对所述跳动限制构件施力。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011086513A JP5828659B2 (ja) | 2011-04-08 | 2011-04-08 | カメラ |
| JP2011-086513 | 2011-04-08 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102736372A true CN102736372A (zh) | 2012-10-17 |
| CN102736372B CN102736372B (zh) | 2015-07-29 |
Family
ID=46025346
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201210102129.4A Expired - Fee Related CN102736372B (zh) | 2011-04-08 | 2012-04-09 | 相机 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US8651752B2 (zh) |
| EP (1) | EP2511762B1 (zh) |
| JP (1) | JP5828659B2 (zh) |
| KR (1) | KR101503751B1 (zh) |
| CN (1) | CN102736372B (zh) |
| BR (1) | BR102012007974B1 (zh) |
| HK (1) | HK1176689A1 (zh) |
| RU (1) | RU2497170C1 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105278214A (zh) * | 2014-07-18 | 2016-01-27 | 佳能株式会社 | 摄像设备和照相机系统 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5818486B2 (ja) | 2011-04-08 | 2015-11-18 | キヤノン株式会社 | カメラ |
| JP6160312B2 (ja) * | 2013-07-05 | 2017-07-12 | リコーイメージング株式会社 | カメラの可動ミラー駆動装置及びカメラ |
| JP6136733B2 (ja) * | 2013-08-08 | 2017-05-31 | リコーイメージング株式会社 | カメラの可動ミラー駆動装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5768644A (en) * | 1993-07-16 | 1998-06-16 | Nikon Corporation | Apparatus for preventing mirror bounce in camera |
| US6003999A (en) * | 1996-04-04 | 1999-12-21 | Nikon Corporation | Mirror recoil preventing device |
| JP2008287110A (ja) * | 2007-05-18 | 2008-11-27 | Canon Inc | 撮像装置 |
| JP2010002868A (ja) * | 2008-06-23 | 2010-01-07 | Olympus Corp | デジタルカメラ |
| CN102004377A (zh) * | 2009-08-31 | 2011-04-06 | 佳能株式会社 | 摄像设备 |
| CN102540652A (zh) * | 2010-12-22 | 2012-07-04 | 佳能株式会社 | 具有抑制镜的跳动的机构的摄像设备 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3326944B2 (ja) * | 1993-12-30 | 2002-09-24 | 株式会社ニコン | カメラ用ミラーのバウンド防止装置 |
| JPH09203972A (ja) * | 1996-01-29 | 1997-08-05 | Nikon Corp | カメラのミラーバウンド防止装置 |
| JPH09274249A (ja) | 1996-04-04 | 1997-10-21 | Nikon Corp | 撮像装置用ミラーのバウンド防止機構 |
| JP3804109B2 (ja) | 1996-07-24 | 2006-08-02 | 株式会社ニコン | カメラのミラーバウンド防止装置 |
| JP4614381B2 (ja) * | 2004-06-29 | 2011-01-19 | キヤノン株式会社 | 光学機器 |
| JP2007298742A (ja) * | 2006-04-28 | 2007-11-15 | Olympus Imaging Corp | ライブビュー可能なカメラ |
| JP2009222860A (ja) | 2008-03-14 | 2009-10-01 | Sony Corp | ミラー駆動装置および撮像装置 |
| KR101532603B1 (ko) | 2008-07-31 | 2015-07-01 | 삼성전자주식회사 | 이미지 처리 장치, 이를 구비하는 촬상 장치 및 촬상 방법 |
| JP2010128199A (ja) * | 2008-11-27 | 2010-06-10 | Olympus Imaging Corp | 一眼レフレックスカメラ |
-
2011
- 2011-04-08 JP JP2011086513A patent/JP5828659B2/ja not_active Expired - Fee Related
-
2012
- 2012-03-22 RU RU2012111079/28A patent/RU2497170C1/ru not_active IP Right Cessation
- 2012-03-27 US US13/431,653 patent/US8651752B2/en not_active Expired - Fee Related
- 2012-03-28 EP EP12161871.4A patent/EP2511762B1/en active Active
- 2012-04-05 KR KR1020120035314A patent/KR101503751B1/ko active IP Right Grant
- 2012-04-05 BR BR102012007974-7A patent/BR102012007974B1/pt active IP Right Grant
- 2012-04-09 CN CN201210102129.4A patent/CN102736372B/zh not_active Expired - Fee Related
-
2013
- 2013-03-26 HK HK13103807.2A patent/HK1176689A1/zh not_active IP Right Cessation
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5768644A (en) * | 1993-07-16 | 1998-06-16 | Nikon Corporation | Apparatus for preventing mirror bounce in camera |
| US6003999A (en) * | 1996-04-04 | 1999-12-21 | Nikon Corporation | Mirror recoil preventing device |
| JP2008287110A (ja) * | 2007-05-18 | 2008-11-27 | Canon Inc | 撮像装置 |
| JP2010002868A (ja) * | 2008-06-23 | 2010-01-07 | Olympus Corp | デジタルカメラ |
| CN102004377A (zh) * | 2009-08-31 | 2011-04-06 | 佳能株式会社 | 摄像设备 |
| CN102540652A (zh) * | 2010-12-22 | 2012-07-04 | 佳能株式会社 | 具有抑制镜的跳动的机构的摄像设备 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105278214A (zh) * | 2014-07-18 | 2016-01-27 | 佳能株式会社 | 摄像设备和照相机系统 |
| CN105278214B (zh) * | 2014-07-18 | 2019-03-26 | 佳能株式会社 | 摄像设备和照相机系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| BR102012007974A2 (pt) | 2013-06-04 |
| EP2511762A1 (en) | 2012-10-17 |
| CN102736372B (zh) | 2015-07-29 |
| RU2497170C1 (ru) | 2013-10-27 |
| BR102012007974B1 (pt) | 2020-11-03 |
| JP5828659B2 (ja) | 2015-12-09 |
| US20120257883A1 (en) | 2012-10-11 |
| JP2012220729A (ja) | 2012-11-12 |
| EP2511762B1 (en) | 2019-11-13 |
| US8651752B2 (en) | 2014-02-18 |
| HK1176689A1 (zh) | 2013-08-02 |
| RU2012111079A (ru) | 2013-09-27 |
| KR101503751B1 (ko) | 2015-03-18 |
| KR20120115118A (ko) | 2012-10-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101226977B1 (ko) | 촬상장치 | |
| CN101676789B (zh) | 焦平面快门和摄像设备 | |
| CN102736372B (zh) | 相机 | |
| JP2012220729A5 (zh) | ||
| CN102736371B (zh) | 相机 | |
| JP6004854B2 (ja) | フォーカルプレンシャッタ、撮像装置及び撮像システム | |
| JP6728923B2 (ja) | 可動ミラー衝撃吸収機構及び同機構を備えた撮像装置 | |
| JP2014059348A (ja) | フォーカルプレンシャッタ、撮像装置及び撮像システム | |
| US8696222B2 (en) | Image-pickup apparatus | |
| JP2018017998A (ja) | ミラー駆動装置及び撮像装置 | |
| CN102749792B (zh) | 相机 | |
| JP4408062B2 (ja) | シャッタ装置および撮影装置 | |
| JP5366397B2 (ja) | シャッタ装置及び撮像装置 | |
| JP2012220730A5 (zh) | ||
| JP6672798B2 (ja) | カメラの反射部材駆動装置 | |
| JP2011150301A (ja) | 一眼レフカメラのブレーキ機構を備えたミラー駆動装置 | |
| JP7171287B2 (ja) | シャッタ装置および撮像装置 | |
| WO2014064902A1 (ja) | ミラーユニットおよび撮像装置 | |
| JP2020154146A (ja) | 撮像装置のミラー駆動機構及び撮像装置のミラー駆動制御方法 | |
| JP2010002869A (ja) | デジタルカメラ | |
| JP2016061799A (ja) | 撮像装置 | |
| JPH01287665A (ja) | カメラのミラー角度調整機構 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: DE Ref document number: 1176689 Country of ref document: HK |
|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: GR Ref document number: 1176689 Country of ref document: HK |
|
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20150729 Termination date: 20210409 |