CN101989438B - 光拾取装置及光盘装置 - Google Patents
光拾取装置及光盘装置 Download PDFInfo
- Publication number
- CN101989438B CN101989438B CN2010102431545A CN201010243154A CN101989438B CN 101989438 B CN101989438 B CN 101989438B CN 2010102431545 A CN2010102431545 A CN 2010102431545A CN 201010243154 A CN201010243154 A CN 201010243154A CN 101989438 B CN101989438 B CN 101989438B
- Authority
- CN
- China
- Prior art keywords
- light
- signal
- sensor
- diffraction
- laser
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/08—Disposition or mounting of heads or light sources relatively to record carriers
- G11B7/09—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam or focus plane for the purpose of maintaining alignment of the light beam relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
- G11B7/0908—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam or focus plane for the purpose of maintaining alignment of the light beam relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following for focusing only
- G11B7/0909—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam or focus plane for the purpose of maintaining alignment of the light beam relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following for focusing only by astigmatic methods
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/12—Heads, e.g. forming of the optical beam spot or modulation of the optical beam
- G11B7/135—Means for guiding the beam from the source to the record carrier or from the record carrier to the detector
- G11B7/1353—Diffractive elements, e.g. holograms or gratings
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B2007/0003—Recording, reproducing or erasing systems characterised by the structure or type of the carrier
- G11B2007/0009—Recording, reproducing or erasing systems characterised by the structure or type of the carrier for carriers having data stored in three dimensions, e.g. volume storage
- G11B2007/0013—Recording, reproducing or erasing systems characterised by the structure or type of the carrier for carriers having data stored in three dimensions, e.g. volume storage for carriers having multiple discrete layers
Landscapes
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Optical Head (AREA)
- Optical Recording Or Reproduction (AREA)
Abstract
本发明提供一种光拾取装置及光盘装置,能够以简单结构有效地抑制杂散光,并且能够有效抑制因进行I/V变换时的噪声引起的再生RF信号劣化。其中,使盘反射的激光中设定在激光光轴周围的4个光束区域的光束衍射。在光检测器的检测面上,配置有接收基于1次衍射作用的信号光(1次信号光)的传感器(P21~P26)、和接收基于2次衍射作用的信号光(2次信号光)的传感器(P31~P38)。在传感器(P31~P38)中将对应的2个传感器短路,从这些传感器中输出4个检测信号。4个检测信号通过I/V放大器(31~34)进行放大及电压变换,并将变换后的电压信号相加而生成再生RF信号。
Description
技术领域
本发明涉及光拾取装置及光盘装置,尤其适合在对层叠有多个记录层的记录介质进行记录/再生时应用。
背景技术
近年来,伴随着光盘的大容量化,推进了记录层的多层化。通过在一张盘内包含多个记录层,能够显著提高盘的数据容量。在层叠记录层时,虽然一般都是单面2层,但是最近为了进一步推进大容量化,还研究了在单面配置3层以上的记录层。这里,使记录层的层叠数增加就能促进盘的大容量化。但是,另一方面,记录层间的间隔变窄,因层间串扰引起的信号劣化增加。
若使记录层多层化,则来自作为记录/再生对象的记录层(目标(target)记录层)的反射光变得微弱。因此,若从处于目标记录层的上下的记录层向光检测器入射不需要的反射光(杂散光),则检测信号会劣化,会对聚焦伺服及跟踪伺服带来不良影响。因此,在这样配置了多层记录层的情况下,需要适当地去除杂散光,使来自光检测器的信号稳定。
在以下的专利文献1中公开了一种利用针孔(pinhole)去除杂散光的技术,在专利文献2中公开了一种通过组合1/2波长板和偏振光光学元件来去除杂散光的技术。
【专利文献1】日本特开2006-260669号公报
【专利文献2】日本特开2006-252716号公报
根据上述专利文献1的技术,由于需要使针孔准确对位在被目标记录层反射的激光(信号光)的会聚位置,故存在着难以进行针孔的位置调整作业的问题。为了容易进行位置调整作业而增大针孔尺寸时,杂散光通过针孔的比例增加,无法有效抑制因杂散光引起的信号劣化。
另外,根据专利文献2的技术,为了去除杂散光,由于除了需要2个2个地配置1/2波长板及偏振光光学元件之外,还需要2个透镜,故部件数和成本增加,还存在各构件的配置调整变得繁杂的课题。另外,需要排列配置这些构件的空间,因此还存在光学系统大型化的问题。
此外,在对这样的光盘进行记录/再生时,基于从光检测器输出的电流信号,除了生成再生RF信号之外,还生成聚焦误差信号或跟踪误差信号等伺服用的信号。光检测器具备被相互区分开的多个传感器,以使可生成伺服用的信号。从各传感器输出的电流信号通过I/V放大器被进行放大及电压变换。由此得到的电压信号被进行加减法运算,从而生成再生RF信号或伺服用的信号。
但是,在I/V放大器中,进行I/V变换时会产生固有噪声。该噪声会叠加到来自各传感器的电压信号中。因此,在再生RF信号及伺服用的信号中产生了因该噪声引起的劣化。
尤其是,由于再生RF信号是将来自各传感器的电压信号全部相加之后生成的,故再生RF信号中叠加有由各I/V放大器产生的全部噪声。另一方面,由于再生RF信号与伺服用的信号相比频率高,故电特性上的劣化大。该劣化随着记录/再生速度的高速化而变得更显著。因此,在容易劣化的再生RF信号中进一步叠加有因I/V放大器引起的噪声时,可以设想再生RF信号的S/N相当低。若再生RF信号的劣化加剧,还存在无法在后级的纠错电路中对应的情况。因此,尤其关于再生RF信号,需要用于抑制因I/V放大器引起的噪声的机构。
发明内容
本发明是为了解决上述课题而实现的,其目的在于提供一种能够以简单结构有效地抑制杂散光,并且能够有效抑制因进行I/V变换时的噪声引起的再生RF信号劣化的光拾取装置及光盘装置。
本发明的第一技术方案涉及光拾取装置。该技术方案所涉及的光拾取装置,具备:激光光源;物镜,其使从所述激光光源射出的激光会聚到记录介质上;像散元件,其对由所述记录介质反射的所述激光导入像散,使第一焦线位置和第二焦线位置在所述激光的行进方向上相互分离,所述第一焦线位置通过所述激光在第一方向上会聚而产生,所述第二焦线位置通过所述激光在与所述第一方向垂直的第二方向上会聚而产生;衍射元件,其使由与所述第一方向和所述第二方向分别平行的第一及第二直线对由所述记录介质反射的所述激光的光束进行分割所得到的4条光束衍射,并使衍射后的这4条光束相互离散;和光检测器,其具有分别接收所述4条光束的m次衍射光和n次衍射光的第一传感器部和第二传感器部,其中,m≠n。这里,所述第一传感器部构成为:接收由相对于所述第一直线和所述第二直线分别具有45°角度的2条直线对所述m次衍射光的4条光束进一步分割所得到的8条光束,并输出数量少于8个的检测信号。
本发明的第二技术方案涉及光盘装置。该技术方案所涉及的光盘装置具备:上述第一技术方案所涉及的光拾取装置;和信号处理部,其将从所述第一传感器部及所述第二传感器部输出的检测信号变换为电压信号,并且对变换后的电压信号进行运算处理。这里,所述信号处理部具备再生信号生成部,该再生信号生成部根据基于来自所述第一传感器部的检测信号的所述电压信号来生成再生RF信号。
(发明效果)
根据本发明,可提供一种能够以简单结构有效地抑制杂散光,并且能够有效抑制因进行I/V变换时的噪声引起的再生RF信号劣化的光拾取装置及光盘装置。
本发明的效果及意义根据以下所述的实施方式的说明变得更为明了。其中,以下的实施方式只是实施本发明时的一个例示,本发明并不由以下的实施方式限制。
附图说明
图1是说明实施方式所涉及的技术原理(光线行进方)的图。
图2是说明实施方式所涉及的技术原理(光线行进方)的图。
图3是说明实施方式所涉及的技术原理(光线行进方)的图。
图4是说明实施方式所涉及的技术原理(光线行进方)的图。
图5是说明实施方式所涉及的技术原理(分割图案和光束的分布)的图。
图6是说明实施方式所涉及的技术原理(分割图案和光束的分布)的图。
图7是说明实施方式所涉及的技术原理(分割图案和光束的分布)的图。
图8是说明实施方式所涉及的技术原理(分割图案和光束的分布)的图。
图9是说明实施方式所涉及的技术原理(角度赋予和光束的分布)的图。
图10是表示实施方式所涉及的传感器图案的配置方法的图。
图11是表示实施例所涉及的光拾取装置的光学系统的图。
图12是对实施例所涉及的角度调整元件的构成进行说明的图。
图13是对实施例所涉及的角度调整元件的全息图案进行说明的图。
图14是表示实施例所涉及的传感器图案的构成的图。
图15是表示实施例及本发明技术原理的优选适用范围的图。
图16是表示变更例所涉及的传感器图案的构成的图。
符号说明:
101-半导体激光器(激光光源);
108-物镜;
111-检测透镜(像散元件);
112-角度调整元件(衍射元件);
113-光检测器;
P21~P26-传感器(第一传感器部/第二传感器部);
P31~P38-传感器(第一传感器部);
P1~P4-传感器(第一传感器部/第二传感器部);
201-I/V放大器部(信号处理部);
202-信号运算电路(信号处理部);
31、32、33、34-I/V放大器(再生信号生成部)。
具体实施方式
下面,参照附图,对本发明的实施方式进行说明。
<技术原理>
首先,参照图1~图10,对本实施方式中应用的技术原理进行说明。
图1(a)是表示由目标记录层反射的激光(信号光)以平行光的状态入射到变形透镜等像散元件时的信号光和杂散光的会聚状态的图。其中,从激光入射面侧观看,“杂散光1”是处于比目标记录层更靠里一层的记录层所反射的激光,“杂散光2”是处于比目标记录层更靠外一层的记录层所反射的激光。另外,该图表示了信号光被聚焦到目标记录层时的状态。
如图所示,通过变形透镜的作用,使信号光在图中的“曲面方向”上会聚从而在面S1上产生焦线,进而,使信号光在与该曲面方向垂直的图中的“平面方向”上会聚从而在面S2上产生焦线。并且,在面S1与面S2之间的面S0上,信号光的光点最小(最小弥散圆)。在基于像散法的聚焦调整中,将光检测器的受光面设置在面S0上。另外,在此,为了简化说明变形透镜中的像散作用,为了方便起见,表现为“曲面方向”和“平面方向”,但是实际上,只要通过变形透镜产生在互不相同的位置连接焦线的作用即可,变形透镜也可以在图1中的“平面方向”上具有曲率。另外,在激光以会聚状态入射到变形透镜的情况下,“平面方向”的变形透镜的形状能够变为直线状(曲率半径=∞)。
另外,如该图(a)所示,杂散光1的焦线位置(在该图中将基于像散元件的2个焦线位置之间的范围表示为“会聚范围”)与信号光的焦线位置相比更靠近像散元件,另外,杂散光2的焦线位置与信号光的焦线位置相比更远离像散元件。
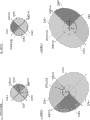
图1(b)~(e)是分别表示平行光部分及面S1、S0、S2上的信号光的光束形状的图。以正圆入射到像散元件中的信号光,在面S1上变为椭圆,在面S0上变为大致正圆之后,在面S2上又再次变为椭圆。这里,面S1上的光束形状和面S2上的光束形状具有各自的长轴相互垂直的关系。
这里,如该图(a)及(b)所示,在平行光部分中的光束的外周,如果在逆时针方向上设定8个位置(位置1~8:在该图中用带圈数字表记),则通过位置1~8的光线通过像散元件而分别受到会聚作用。另外,位置4和位置8位于在以与曲面方向平行的直线对平行光部分的光束截面进行2分割的情况下的分割线上,位置2和位置6位于以与平面方向平行的直线对平行光部分的光束截面进行2分割的情况下的分割线上。位置1、3、5、7分别位于由位置2、4、6、8划分的外周圆弧的中间。
平行光部分中通过位置4和位置8的光线在面S1上会聚到曲面方向的焦线之后入射到面S0。因此,通过这些位置4、8的光线在面S0上通过该图(d)所示的位置4、8。同样,平行光部分中通过位置1、3、5、7的光线,在面S1上会聚到曲面方向的焦线之后也入射到面S0,故在面S0上通过该图(d)所示的位置1、3、5、7。相对于此,平行光部分中通过位置2、6的光线,在面S1上不会聚到曲面方向的焦线而入射到面S0。因此,通过这些位置2、6的光线在面S0上通过该图(d)所示的位置2、6。
图2(b)~(e)是分别表示平行光部分及面S1、S0、S2上的杂散光1的光束形状和光线通过位置的图。如该图(b)所示,如果在杂散光1的外周与上述信号光的情况同样地设置8个位置1~8,则通过这8个位置1~8的光线,在会聚到曲面方向的焦线及平面方向的焦线方向中的其中一个方向之后,入射到面S0。因此,在平行光部分中通过位置1~8的光线,在面S0上分别通过该图(d)所示的位置1~8。
图3(b)~(e)是分别表示平行光部分及面S1、S0、S2上的杂散光2的光束形状和光线通过位置的图。如该图(b)所示,如果在杂散光2的外周与上述信号光的情况同样地设置8个位置1~8,则通过这8个位置1~8的光线,在不会聚到曲面方向的焦线及平面方向的焦线方向中的任一个方向的情况下入射到面S0。因此,在平行光部分中通过位置1~8的光线,在面S0上分别通过该图(d)所示的位置1~8。
图4是表示将以上说明的平行光部分及面S1、S0、S2上的光束形状和光线通过位置在信号光、杂散光1及杂散光2中进行对比的图。对比该图(c)部分可知,在平行光部分中通过了位置1的信号光、杂散光1及杂散光2的光束,在面S0上分别通过了互不相同的外周位置。同样,在平行光部分中通过了位置3、4、5、7、8的信号光、杂散光1及杂散光2的光束,也在面S0上分别通过了互不相同的外周位置。在平行光部分中通过了位置2、6的信号光和杂散光2的光束,在面S0上通过了相同的外周位置。此时,在平行光部分中通过了位置2、6的信号光和杂散光1的光束,在面S0通过互不相同的外周位置,另外在平行光部分中通过了位置2、6的杂散光1和杂散光2的光束,在面S0上通过互不相同的外周位置。
接着,考虑以上现象,对平行光部分中的信号光及杂散光1、2的区域分割图案、和面S0上的信号光及杂散光1、2的照射区域之间关系进行研究。
首先,如图5(a)所示,以相对于平面方向和曲面方向倾斜45°的2条直线,对平行光部分中的信号光及杂散光1、2进行分割,划分为4个光束区域A~D。另外,该分割图案对应于基于现有的像散法的区域分割。
此时,根据上述现象,光束区域A~D的信号光在面S0上如该图(b)那样分布。另外,根据上述现象,光束区域A~D的杂散光1及杂散光2分别如该图(c)及(d)那样分布。
这里,若按照每个光束区域取出面S0上的信号光和杂散光1、2,则各光的分布如图6(a)至(d)所示。此时,各光束区域的信号光中必定叠加了相同的光束区域的杂散光1及杂散光2中的其中一个。因此,如果用光检测器上的传感器图案接收各光束区域的信号光,则至少相同的光束区域中的杂散光1或杂散光2同时入射到所对应的传感器图案上,由此检测信号产生劣化。
对此,如图7(a)所示,以与平面方向和曲面方向平行的2条直线,对平行光部分中的信号光及杂散光1、2进行分割,划分为4个光束区域A~D。此时,根据上述现象,光束区域A~D的信号光在面S0上如该图(b)那样分布。另外,根据上述现象,光束区域A~D的杂散光1及杂散光2分别如该图(c)及(d)那样分布。
这里,若按照每个光束区域取出面S0上的信号光和杂散光1、2,则各光的分布如图8(a)至(d)所述。此时,各光束区域的信号光中都未叠加相同的光束区域的杂散光1及杂散光2。因此,在使各光束区域内的光束(信号光、杂散光1、2)离散在不同的方向上之后,如果采用由传感器图案只接收信号光的构成,则能够在所对应的传感器图案上只入射信号光,从而能够防止杂散光的入射。由此,能够避免因杂散光引起的检测信号的劣化。
如上所述,以与平面方向和曲面方向平行的2条直线,将信号光及杂散光1、2分割为4个光束区域A~D,使通过这些光束区域A~D的光分散,并在面S0上分离,从而能够只提取信号光。本实施方式以该原理为基础。
图9是表示使通过图7(a)所示的4个光束区域A~D的光束(信号光、杂散光1、2)的行进方向分别在不同的方向上变化相同角度时、在面S0上的信号光和杂散光1、2的分布状态的图。这里,如该图(a)所示,通过光束区域A~D的光束(信号光、杂散光1、2)的行进方向分别在方向Da、Db、Dc、Dd上变化了相同的角度量α(未图示)。其中,方向Da、Db、Dc、Dd相对于平面方向和曲面方向分别有45°的倾斜角。
此时,通过调节方向Da、Db、Dc、Dd中的角度量α,能够使各光束区域的信号光和杂散光1、2在S0平面上如该图(b)所示那样分布。结果,如图所示,能够在S0平面上设定仅存在信号光的信号光区域。通过在该信号光区域设定光检测器的传感器图案,从而能够以所对应的传感器图案只接收各区域的信号光。
图10是表示传感器图案的配置方法的图。该图(a)及(b)是表示基于现有的像散法的光束的分割方法和传感器图案的图,该图(c)及(d)是表示基于上述原理的光束的分割方法和传感器图案的图。这里,轨道方向相对于平面方向和曲面方向有45°的倾斜角。另外,在该图(a)及(b)中,为了说明的方便起见,光束被划分为8个光束区域a~h。另外,用实线表示因轨道槽引起的衍射的像(轨道像),用虚线表示离焦(off focus)时的光束形状。
另外,公知用波长/(轨道间距×物镜NA)求出因轨道槽引起的信号光的0次衍射像和一次衍射像的重叠状态,如该图(a)、(b)、(d)所示,一次衍射像收敛在4个光束区域a、d、e、h中的条件为 
在现有的像散法中,如该图(b)那样设定光检测器的传感器P1~P4(4分割传感器)。此时,用A~H表示基于光束区域a~h的光强度的检测信号分量,则聚焦误差信号FE和推挽信号PP基于下述(1)、(2)的运算求出。
FE=(A+B+E+F)-(C+D+G+H) …(1)
PP=(A+B+G+H)-(C+D+E+F) …(2)
对此,在上述图9(b)的分布状态下,如上所述,信号光在信号光区域内以图10(c)的状态分布。此时,通过该图(a)所示的光束区域a~h的信号光如该图(d)所示。即,通过该图(a)的光束区域a~h的信号光,在设置有光检测器的传感器图案的面S0上,被导入该图(d)所示的光束区域a~h。
因此,在该图(d)所示的光束区域a~h的位置,如果设定如该图(d)中重叠表示的传感器P11~P18,则通过与该图(b)的情况同样的运算处理能够生成聚焦误差信号和推挽信号。即,此时如果用A~H表示来自对光束区域a~h的光束进行接收的传感器图案的检测信号,则与该图(b)的情况同样,通过上述式(1)、(2)的运算能够取得聚焦误差信号FE和推挽信号PP。
以上,基于本原理,通过以与图1的平面方向和曲面方向平行的2条直线,将平行光部分中的信号光及杂散光1、2分割为4个光束区域A~D,使通过这些光束区域A~D的光分散,进而由被2分割的受光部(2分割传感器)分别接收分散后的各光束区域A~D中的信号光,从而通过于现有的像散法的情况同样的运算处理,能够生成聚焦误差信号和推挽信号(跟踪误差信号)。
但是,实际的光学系统中,从图10(d)所示的8个传感器输出的检测信号,在通过各传感器所对应的I/V放大器之后被输入到后级电路中。该I/V放大器将从传感器输出的检测信号(电流信号)变换为电压信号,进而放大该电压信号并输出到后级的电路中。
此时,由于在各传感器所对应的I/V放大器中会产生固有噪声,所以从I/V放大器输出的电压信号因该噪声而劣化。这样的放大器噪声随着在后级电路中用于生成信号的I/V放大器的数量增加而增加。例如,在利用了图10(d)所示的8个传感器的情况下,与现有的4分割传感器(4个传感器)相比,对由信号光的光量总和产生的再生RF信号上叠加的放大器噪声产生影响的I/V放大器的数量变为2倍。此时,S/N(信噪比)劣化3dB。
该再生RF信号的劣化,通过削减用于生成再生RF信号的I/V放大器的个数进行抑制。用于抑制再生RF信号劣化的构成通过如下的实施例可变得明了。
<实施例>
以下,对基于上述原理的实施例进行说明。
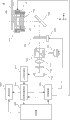
图11表示本实施例所涉及的光拾取装置的光学系统。另外,在该图中,为了方便起见,一并显示了关联的电路结构。另外,在该图中的盘中层叠配置了多个记录层。
图中,再生电路203、伺服电路204及控制器205配置在搭载光拾取装置的光盘装置侧。I/V放大器部201可以配置在光拾取装置侧,或者也可以配置在光盘装置侧。另外,信号运算电路202的全部或一部分可以配置在光拾取装置侧,或也可以配置在光盘装置侧。在光检测器113由具备IC(Integrated Circuit)部的PDIC构成的情况下,I/V放大器部201包括在光检测器113的IC部中。此时,信号运算电路202的一部分也可包括在光检测器113的IC部中。
如图所示,光拾取装置的光学系统具备:半导体激光器101、偏振光束分光器102、准直透镜103、透镜促动器104、立起反射镜105、1/4波长板106、光圈107、物镜108、支架109、物镜促动器110、检测透镜111、角度调整元件112和光检测器113。
半导体激光器101射出规定波长的激光。关于从半导体激光器101射出的激光的宽度角,水平宽度角和垂直宽度角不同。
偏振光束分光器102使从半导体激光器101入射来的激光(S偏振光)大致全反射,并且使从准直透镜103侧入射的激光(P偏振光)大致全透过。准直透镜103将从偏振光束分光器102侧入射来的激光变换为平行光。
透镜促动器104根据从伺服电路203输入的伺服信号,使准直透镜103在光轴方向上位移。由此,校正了激光产生的像差。立起反射镜105将从准直透镜103侧入射来的激光向朝向物镜108的方向反射。
1/4波长板106将朝向盘的激光变换为圆偏振光,并且将来自盘的反射光变换为与朝向盘时的偏振光方向正交的直线偏振光。由此,由盘反射的激光透过偏振光束分光器102。
光圈107将激光的光束形状调整为圆形形状,以使激光相对于物镜108的有效直径适当。物镜108被设计为能使激光适当会聚到盘内的目标记录层。支架109一体地保持1/4波长板106和物镜108。物镜促动器110由现有公知的电磁驱动电路构成,在该电路中,聚焦线圈等的线圈部被安装于支架19。
检测透镜111将像散导入到来自盘的反射光。即,检测透镜111相当于图1的像散元件。检测透镜111被配置为:平面方向和曲面方向相对于来自盘的轨道像分别为45°倾斜角。
角度调整元件112在激光的入射面形成有全息图案。由此,从检测透镜111侧入射来的激光的行进方向被改变。此外,关于角度调整元件112,随后参照图12进行说明。
光检测器113在受光面上具有多个传感器。光检测器113配置为使这些传感器定位于图1的面S0的位置。此外,关于光检测器113的传感器图案,随后参照图14进行说明。
I/V放大器部201具有10个I/V放大器(未图示)。这些I/V放大器将从光检测器113的受光面上的传感器输出的检测信号变换为电压信号,进而放大该电压信号并输出到信号运算电路202中。
信号运算电路202通过基于从I/V放大器部201输入来的电压信号的运算处理,生成再生RF信号、聚焦误差信号、推挽信号(跟踪误差信号)及位置偏差信号(表示角度调整元件112和光检测器113的位置偏差的信号)。所生成的再生RF信号被送到再生电路203及伺服电路204中,聚焦误差信号及推挽信号(跟踪误差信号)被送到伺服电路204中,位置偏差信号被送到控制器205中。此外,关于在信号运算电路202中进行的这些信号的生成,随后参照图14进行说明。
再生电路203对从信号运算电路202输入来的再生RF信号进行解调之后生成再生数据。伺服电路204根据从信号运算电路202输入来的聚焦误差信号和推挽信号(跟踪误差信号)生成聚焦伺服信号和跟踪伺服信号,并将这些信号输出到物镜促动器110中。另外,伺服电路204将伺服信号输出到透镜促动器104中,以使从信号运算电路202输入来的再生RF信号的品质最优。控制器205按照内置存储器所存储的程序来控制各部。
图12(a)是表示沿着来自盘的反射光的行进方向观看角度调整元件112时的平面图。
角度调整元件112由正方形形状的透明板形成,在光入射面形成有火焰(blaze)型的全息图案。光入射面如图所示被划分为4个全息区域112a~112d。角度调整元件112配置在检测透镜111的后级,以使通过了图9(a)的光束区域A~D后的激光(信号光、杂散光1、2)分别入射到这些全息区域112a~112d。
全息区域112a~112d,使入射来的激光(信号光、杂散光1、2)通过1次衍射作用沿着方向Va1~Vd1衍射,通过2次衍射作用沿着方向Va2~Vd2衍射。方向Va1~Vd1与图9(a)的方向Da~Dd一致,并且方向Va2~Vd2也与图9(a)的方向Da~Dd一致。另外,各区域中的1次衍射角都相同,各区域中的2次衍射角也都相同。2次衍射角比1次衍射角大。由此,通过全息区域112a~112d的1次衍射作用,使从检测透镜111入射来的激光(信号光、杂散光1、2)在光检测器113的受光面上如图9(b)一样分布。另外,通过全息区域112a~112d的2次衍射作用,使从检测透镜111入射来的激光(信号光、杂散光1、2)在光检测器113的受光面上比图9(b)分布得更广。
图12(b)是表示角度调整元件112的衍射作用下的信号光分布的图。另外,图中用虚线包围的扇型部分表示因1次衍射作用引起的杂散光1、2。
如图所示,基于1次衍射作用的信号光(以下称为“1次信号光”)的信号光区域与图9(b)相同。相对于此,基于2次衍射作用的信号光(以下称为“2次信号光”)的信号光区域位于1次信号光的信号光区域的外侧。另外,因2次衍射作用引起的杂散光1、2(未图示)扩展到2次信号光的信号光区域的外侧。
图13(a)表示火焰型的全息图案的示意图。在火焰型的全息图案中,根据全息图案的火焰高度H调整衍射效率,根据全息图案的间距W调整衍射角度。
图13(b)表示在火焰型的全息图案中火焰高度和衍射效率的关系的图。角度调整元件112上形成的全息图案的火焰高度H被设定为图中的“设定值”。此时,角度调整元件112的1次衍射效率为9%,2次衍射效率为83%。
图14是表示配置在光检测器113的受光面上的传感器图案的图。此外,在该图中,一并表示I/V放大器部201内的I/V放大器21~26、31~34。
如图所示,在光检测器113的受光面上配置有:用于接收图12(b)所示的1次信号光的传感器P21~P26、和用于接收图12(b)所示的2次信号光的传感器P31~P38。此外,按照使1次信号光和2次信号光分别定位到传感器P21~P26、P31~P38的方式,设定全息图案的间距W。
传感器P21的大小成为如下的大小:一并接收入射到图10(d)所示的传感器图案中的传感器P11和P12中的激光的大小。同样,传感器P26的大小成为如下的大小:一并接收入射到图10(d)所示的传感器图案中的传感器P17和P18中的激光的大小。传感器P32和P35、传感器P33和P38、传感器P34和P37、传感器P31和P36分别被短路,以使检测信号相加。
从传感器P21~P26输出的6个检测信号B0、C2、A1、C1、A2、D0分别被输入到I/V放大器部201内的I/V放大器21~26中。从传感器P32和P35、传感器P33和P38、传感器P34和P37、传感器P31和P36输出的4个检测信号MA、MB、MC、MD分别被输入到I/V放大器部201内的I/V放大器31~34中。从各I/V放大器输出的电压信号被用于在后述的信号运算电路202中进行的运算。
接着,对信号运算电路202进行的运算进行说明。其中,在以下式子中,为了方便起见,用于运算的电压信号,利用与表示通过I/V放大器之前的电流信号的记号相同的记号进行表示。
根据以下式子计算再生RF信号、槽干扰对应的聚焦误差信号FE、基于DPP(Differential Push-Pull)法的跟踪误差信号DPP、光检测器113的Z轴正方向的位置偏差信号PD1及Y轴负方向的位置偏差信号PD2、以及角度调整元件112的Y轴负方向的位置偏差信号HOE1及Z轴正方向的位置偏差信号HOE2。
RF=MA+MB+MC+MD
FE={(MA+MC)-(MB+MD)}
+k1{(A1+C1)-(A2+C2)}
DPP={(MA+MD)-(MB+MC)}
+k2{(A1+C2)-(A2+C1)}
PD1={(MA+MD)-(MB+MC)}
/{(MA+MD)+(MB+MC)}
PD2={(MA+MB)-(MC+MD)}
/{(MA+MB)+(MC+MD)}
HOE1=(B0-D0)/(B0+D0)
HOE2={(C1+C2)-(A1+A2)}
/{(C1+C2)+(A1+A2)}
此外,通过调整上述式子中的k1、k2,从而抑制了上述聚焦误差信号中的槽干扰,抑制了上述跟踪误差信号DPP的DC分量。另外,k1的调整方法及上述FE的运算可抑制槽干扰这一内容,记载于申请人在先申请的日本特愿2009-013592号公报中。另外,k2的调整方法及上述DPP的运算可抑制DC分量这一内容,记载于申请人在先申请的日本特愿2009-129668号公报中。
另外,对光检测器113进行位置调整以使位置偏差信号PD1、PD2的值为0,对角度调整元件112进行位置调整以使位置偏差信号HOE1、HOE2的值为0。即,在制造光拾取装置时,这些信号被送到评价装置中。然后,制造者监视这些信号,并对光检测器113和角度调整元件112进行位置调整以使这些信号的值为0。其中,利用了这些信号的光检测器113和角度调整元件112的位置调整方法,记载于申请人在先申请的日本特愿2009-177046号公报中。
另外,除了上述式子之外,也可以根据现有公知的运算利用MA~MD,来计算基于DPD(Differential Phase Detection)法的跟踪误差信号DPD。
以上,根据本实施例,能够抑制从配置在盘内的记录层中的目标记录层反射出的信号光、和从该目标记录层的上下的记录层反射出的杂散光1、2,在光检测器113的受光面(聚焦时信号光点为最小弥散圆的面S0)上相互重叠。具体地说,能够使受光面(面S0)上的信号光和杂散光1、2的分布处于图12(b)的状态。因此,通过在图12(b)的1次信号光的信号光区域和2次信号光的信号光区域上配置图14所示的传感器图案,能够由传感器P21~P26、P31~P38适当接收所对应的信号光。因此,能够抑制因杂散光引起的检测信号劣化。
此外,参照图12(b)可知,在1次信号光的信号光区域中未重叠杂散光。因此,能够避免杂散光施加于图14的传感器P21~P26的情况。相对于此,图12(b)所示的1次衍射作用引起的杂散光的区域实际上比该图中用虚线表示的区域宽,故1次衍射作用引起的杂散光施加到了2次信号光的照射区域。但是,此时由于1次衍射光的衍射效率被抑制在9%左右,故与2次信号光的强度相比,1次衍射光的衍射效率引起的杂散光的强度显著变小。因此,从图14的传感器P31~P38输出几乎未受到因1次衍射作用引起的杂散光带来的影响的信号。
此外,根据本实施例,如图14所示,从用于接收1次信号光的传感器P21~P26中输出的检测信号被输入到6个I/V放大器21~26,从用于接收2次信号光的传感器P31~P38中输出的检测信号被输入到4个I/V放大器31~34。于是,基于从各I/V放大器输出的电压信号进行了上述式子的运算。这样,在再生RF信号所利用的检测信号MA~MD进行I/V变换后的电压信号中,只叠加有4个I/V放大器带来的放大器噪声。因此,与根据用8个I/V放大器对图10(d)所示的来自8个传感器P11~P18的输出信号进行I/V变换后的电压信号来生成再生RF信号的情况比较,由于重叠在再生RF信号上的放大器噪声减少了,故能够得到精度更高的再生RF信号。
另外,在本实施例中,如图14所示,由于图8(d)的传感器P11、P12和传感器P17、P18分别被一体化而作为传感器P21和P26,故重叠于位置偏差信号HOE1的放大器噪声也减少了。
另外,只需在盘反射的激光的光路中即在图11的构成中检测透镜111与光检测器113之间配置角度调整元件112,就能够达成上述的效果。因此,根据本实施例,能够以简单构成有效地去除因杂散光带来的影响,且能够抑制重叠于用于信号运算的电压信号中的放大器噪声。
另外,如图15所示,在下述情况时能够得到基于上述原理的杂散光去除效果:杂散光1的平面方向的焦线位置位于比面S0(信号光的点为最小弥散圆的面)更靠近像散元件的位置、且杂散光2的曲面方向的焦线位置位于比面S0更远离像散元件的位置。即,如果满足该关系,则信号光和杂散光1、2的分布成为上述图8所示的状态,在面S0上信号光和杂散光1、2不重叠。换言之,只要满足该关系,即使杂散光1的平面方向的焦线位置比信号光的曲面方向的焦线位置更靠近面S0、或者杂散光2的曲面方向的焦线位置比信号光的平面方向的焦线位置更接近面S0,也能够发挥基于上述原理的本发明乃至实施例的效果。
<变更例>
在上述实施例中,虽然利用了具有火焰型全息图案的角度调整元件112,但是也可以利用具有阶梯型全息图案的角度调整元件112。另外,在上述实施例中,虽然可由光检测器113接收1次信号光和2次信号光,但是也可以接收另两个衍射次数的信号光。
以下,表示利用具有阶梯型全息图案的角度调整元件112,并由光检测器113接收基于0次衍射作用的信号光和基于1次衍射作用的信号光的情况下的构成例。
图13(c)是阶梯型全息图案的示意图。在阶梯型全息图案中,根据全息图案的阶梯数和每一阶梯的高度H调整衍射效率,根据全息图案的间距W调整衍射角度。在本变更例中,利用了4阶梯型全息图。
图13(d)表示在4阶梯型全息图中每一阶梯的高度和衍射效率的关系的图。在变更例中,每一步幅的高度H被设定为“设定值1”,以使角度调整元件112的0次衍射效率为70%,1次衍射效率为15%。另外,也可将每一阶梯的高度设定为“设定值2”,此时虽然衍射光相对于入射到全息图的激光的利用效率降低了,但是0次衍射效率为10%、1次衍射效率为70%。
图16是表示配置在本变更例的光检测器113的受光面上的传感器图案的图。该图(a)、(b)分别是表示在图14(d)中每一阶梯的高度H被设为“设定值1”、“设定值2”的情况的图。此外,由于图16(a)、(b)的传感器图案相同,故以下关于传感器图案只对该图(a)进行说明。
参照该图(a),在光检测器113的受光面上,除了配置上述实施方式所示的用于接收1次信号光的传感器P21~P26之外,还在传感器P21~P26的内侧的中央区域配置图10(b)所示的以往公知的4分割传感器P1~P4。传感器P1~P4用于接收基于0次衍射作用的信号光(以下,称为“0”次信号光)。另外,设定全息图案的间距W,以使1次信号光的分布定位到传感器P21~P26。
从传感器P1~P4输出的检测信号I1~I4分别被输入到I/V放大器部201内的I/V放大器(未图示)。从各I/V放大器输出的电压信号被用于在信号运算电路202中进行的运算。
接着,对在信号运算电路202中进行的运算进行说明。其中,在以下的式子中,为了方便起见,用于运算的电压信号,用与表示通过I/V放大器之前的电流信号的记号相同的记号进行表示。
通过以下式子计算该图(a)的传感器图案的再生RF信号。
RF=I1+I2+I3+I4
根据以下式子计算该图(b)的传感器图案的再生RF信号。
RF=A1+A2+B0+C1+C2+D0
此外,在该图(a)、(b)的传感器图案的情况下通用,通过以下式子计算槽干扰对应的聚焦误差信号FE、基于DPP(Differential Push-Pull)法的跟踪误差信号DPP、光检测器113的Z轴正方向的位置偏差信号PD1及Y轴负方向的位置偏差信号PD2、以及角度调整元件112的Y轴负方向的位置偏差信号HOE1及Z轴正方向的位置偏差信号HOE2。
FE={(I1+I3)-(I2+I4)}
+k1{(A1+C1)-(A2+C2)}
DPP={(I1+I4)-(I2+I3)}
+k2{(A1+C2)-(A2+C1)}
PD1={(I1+I4)-(I2+I3)}
/{(I1+I4)+(I2+I3)}
PD2={(I1+I2)-(I3+I4)}
/{(I1+I2)+(I3+I4)}
HOE1=(B0-D0)/(B0+D0)
HOE2={(C1+C2)-(A1+A2)}
/{(C1+C2)+(A1+A2)}
此外,通过调整上述式子中的k1、k2,从而抑制了上述聚焦误差信号中的槽干扰,抑制了上述跟踪误差信号DPP的DC分量。
另外,k1的调整方法及上述FE的运算可抑制槽干扰这一内容,记载于申请人在先申请的日本特愿2009-013592号公报中。另外,k2的调整方法及上述DPP的运算可抑制DC分量这一内容,记载于申请人在先申请的日本特愿2009-129668号公报中。此外,利用位置偏差信号PD1、PD2、HOE1、HOE2对光检测器113和角度调整元件112的位置进行调整(参照日本特愿2009-177046号公报)。
另外,除了上述式子之外,也可以根据以往公知的运算利用MA~MD,来计算基于DPD(Differential Phase Detection)法的跟踪误差信号DPD。
以上,在本变更例中,能够抑制因杂散光引起的检测信号劣化。其中,在图16(a)、(b)所示的2个变更例中,因0次衍射作用引起的杂散光都施加于所有的传感器中。在图16(a)的变更例中,由于0次光的衍射效率设定得较高,故因杂散光带来的影响大。相对于此,在图16(b)的变更例中,由于0次光的衍射效率设定得较低,故因杂散光带来的影响小。因此,在这两个变更例中,图16(b)的变更例能够得到精度更高的信号。
此外,根据本变更例,如图16(a)、(b)所示,从用于接收0次信号光的传感器P1~P4中输出的检测信号被输入到4个I/V放大器,从用于接收1次信号光的传感器P21~P26中输出的检测信号被输入到6个I/V放大器。于是,基于从各I/V放大器输出的电压信号进行了上述式子的运算。这样,例如,在该图(a)情况下的再生RF信号所利用的检测信号I1~I4上,只叠加有4个I/V放大器带来的放大器噪声。另外,在该图(b)情况下的再生RF信号所利用的检测信号A1、A2、B0、C1、C2、D0中,只叠加有6个I/V放大器引起的放大器噪声。因此,与图10(d)的情况相比,由于重叠于再生RF信号的放大器噪声减少了,故能够得到精度更高的再生RF信号。
另外,根据本变更例,角度调整元件112的激光的利用效率,图16(a)情况下为85%,图16(b)情况下为80%,与上述实施例的利用效率90%相比略低。但是,由于角度调整元件112是由阶梯型全息图案形成的,故与利用上述实施例的火焰型全息图案的情况相比,能够更经济地作成角度调整元件112。
以上,虽然对本发明的实施例及变更例进行了说明,但是本发明并不限定于上述实施例及变更例。另外,本发明的实施方式也可以进行除上述以外的各种变更。
例如,在上述实施例及变更例中,虽然全息区域112a~112d只具有使激光的行进方向变化一定角度这一角度赋予的衍射作用,但是也可以在全息区域112a~112d中设定除角度赋予之外还可同时发挥检测透镜111的像散作用的全息图案。另外,还可以在角度调整元件112的光入射面形成用于上述角度赋予的全息图案,使角度调整元件112的光射出面具有用于具有像散作用的全息图案。这样,能够省略检测透镜111,从而能够谋求部件数和成本的削减。
另外,在上述实施例中,只在用于计算角度调整元件112的位置偏差信号HOE1、HOE2的运算式中,利用从传感器P21、P26输出的检测信号B0、D0。因此,若不需要生成角度调整元件112的位置偏差信号,就能够省略传感器P21、P26,从而能够使传感器图案简洁。
另外,在上述变更例中,如上所述,0次衍射作用引起的杂散光除入射到传感器P1~P4之外,还入射到传感器P21~P26。这样,在由于0次衍射作用引起的杂散光的入射而存在来自传感器P21~P26的检测信号劣化的问题的情况下,也可增大角度调整元件112的衍射角度,使传感器P21~P26的位置从传感器P1~P4的位置进一步向外侧离开。这样,既能由传感器P21~P26接收1次信号光,又能降低入射到传感器P21~P26的因0次衍射作用引起的杂散光1、2的光量。另外,此时可调整角度调整元件112的衍射效率。例如,只要将0次衍射效率设定得较小,就能降低入射到传感器P21~P26的因0次衍射作用引起的杂散光1、2的光量。
另外,在上述变更例中,如上所述,虽然设定了基于DPP法的跟踪误差信号DPP,但是在入射到传感器P1~P4的因0次衍射作用的杂散光1、2导致检测信号I1~I4劣化的问题的情况下,也可根据下式计计算信号DPP。
DPP=(B0-D0)+k{(A1+C2)-(A2+C1)}
此外,在上述变更例中,图16(a)、(b)所示的传感器P22和P23、传感器P24和P25也可分别被短路。此时,通过传感器P1~P4根据图10(b)所示的从前的聚焦误差信号FE来计算聚焦误差信号。这样,虽然不能生成槽干扰所对应的聚焦误差信号,但是却降低了检测信号上叠加的因I/V放大器引起的放大器噪声。
另外,在上述实施例及变更例中,火焰型全息图案中的火焰高度并不限定于图13(b)的“设定值”,阶梯型的全息图案中的每一阶梯的高度并不限定于图13(d)的“设定值1”、“设定值2”。另外,阶梯型全息图案中的阶梯数也并不限定于4。即,这些全息图案的设定,只要能够由光检测器113的传感器图案接收信号光,就可以进行适当变更。
另外,在上述实施方式中,虽然表示了从用于生成再生RF信号的传感器组输出4个或6个检测信号的构成,但是也可以从这些传感器组中生成比8个少的其他数量的检测信号。例如,也可以短路传感器P32、P34、P35、P37以使图14所示的信号MA和信号MC相加,进而短路传感器P31、P33、P36、P38以使信号MB和MD相加。此时,与上述实施方式的情况同样地生成聚焦误差信号,并基于来自传感器P21~P26的检测信号生成跟踪误差信号。这样,能够将用于生成再生RF信号的I/V放大器的数量设定为2个,能够进一步减少放大器噪声对再生RF信号的影响。
除此之外,也可以采用如下构成:短路图14所示的所有传感器P31~P38,并从这些传感器P31~P38输出一个检测信号。此时,对该检测信号进行I/V变换后生成再生RF信号。其中,此时由于需要基于1次信号光生成聚焦误差信号和跟踪误差信号,故需要在传感器P31~P38的内侧配置图10(d)所示的8个传感器。另外,可适当调整1次信号光和2次信号光的衍射效率。
除此之外,也能够采用如下构成:短路图16(a)、(b)所示的传感器P1、P3,进而短路传感器P2、P4。此时,也在传感器P1~P4的外侧配置图10(d)所示的8个传感器,以使能够生成聚焦误差信号和跟踪误差信号。
另外,在上述实施例及变更例中,通过衍射作用衰减了用于生成再生RF信号的信号光的强度。因此,与没有衰减的情况相比,再生RF信号的振幅也降低了。但是,在上述实施例及变更例中,由于也降低了因I/V变换带来的噪声,故即使由此降低了再生RF信号的振幅,与以图10(d)的传感器图案接收图10(c)的信号光的情况相比,也能够抑制噪声对再生RF信号振幅的影响。
除此之外,在本发明保护范围所示的技术思想的范围内,可对本发明的实施方式进行各种变更。
Claims (6)
1.一种光拾取装置,其特征在于,具备:
激光光源;
物镜,其使从所述激光光源射出的激光会聚到记录介质上;
像散元件,其对由所述记录介质反射的所述激光导入像散,使第一焦线位置和第二焦线位置在所述激光的行进方向上相互分离,所述第一焦线位置通过所述激光在第一方向上会聚而产生,所述第二焦线位置通过所述激光在与所述第一方向垂直的第二方向上会聚而产生;
衍射元件,其使由与所述第一方向和所述第二方向分别平行的第一及第二直线对由所述记录介质反射的所述激光的光束进行分割所得到的4条光束衍射,并使衍射后的这4条光束相互离散;和
光检测器,其具有分别接收所述4条光束的m次衍射光和n次衍射光的第一传感器部和第二传感器部,其中,m≠n;
所述第一传感器部构成为:接收由相对于所述第一直线和所述第二直线分别具有45°角度的2条直线对所述m次衍射光的4条光束进一步分割所得到的8条光束,并输出数量少于8个的检测信号,该数量少于8个的检测信号是对由所述第一传感器部所包括的各传感器输出的信号进行运算而得到的。
2.根据权利要求1所述的光拾取装置,其特征在于,
所述第一传感器部接收对所述m次衍射光的4条光束进一步分割所得到的所述8条光束,并输出4个检测信号。
3.根据权利要求2所述的光拾取装置,其特征在于,
所述第一传感器部具备分别独立接收所述8条光束的8个传感器,通过将这8个传感器中对应的2个传感器短路来输出所述4个检测信号。
4.根据权利要求1~3中任意一项所述的光拾取装置,其特征在于,
所述第二传感器部接收0次以外的衍射光,
所述第一传感器部接收衍射方向与由所述第二传感器部接收的衍射光相同且衍射角比由所述第二传感器部接收的衍射光大的衍射光。
5.根据权利要求1~3中任意一项所述的光拾取装置,其特征在于,
所述第二传感器部具有接收0次衍射光的4个传感器,
所述第一传感器部接收1次以上的衍射光。
6.一种光盘装置,其特征在于,具备:
权利要求1~5中任意一项所述的光拾取装置;和
信号处理部,其将从所述第一传感器部及所述第二传感器部输出的检测信号变换为电压信号,并且对变换后的电压信号进行运算处理;
所述信号处理部具备再生信号生成部,该再生信号生成部根据基于来自所述第一传感器部的检测信号的所述电压信号来生成再生RF信号。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009-178709 | 2009-07-31 | ||
| JP2009178709A JP4722205B2 (ja) | 2009-07-31 | 2009-07-31 | 光ピックアップ装置および光ディスク装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101989438A CN101989438A (zh) | 2011-03-23 |
| CN101989438B true CN101989438B (zh) | 2012-12-12 |
Family
ID=43526882
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2010102431545A Expired - Fee Related CN101989438B (zh) | 2009-07-31 | 2010-07-28 | 光拾取装置及光盘装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8040779B2 (zh) |
| JP (1) | JP4722205B2 (zh) |
| KR (1) | KR101109951B1 (zh) |
| CN (1) | CN101989438B (zh) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5173923B2 (ja) * | 2009-04-28 | 2013-04-03 | 三洋電機株式会社 | 光ピックアップ装置および光ディスク装置 |
| US9689987B1 (en) * | 2012-06-13 | 2017-06-27 | Physical Optics Corporation | Integrative optics system, device, and method |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101075449A (zh) * | 2006-05-16 | 2007-11-21 | 株式会社日立媒介电子 | 光盘驱动装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0630162A (ja) * | 1992-04-27 | 1994-02-04 | Murata Mach Ltd | 送信案内文作成機能付ファクシミリ装置 |
| JP3879897B2 (ja) * | 2000-09-07 | 2007-02-14 | パイオニア株式会社 | 光ピックアップ装置 |
| WO2002056309A1 (fr) * | 2001-01-12 | 2002-07-18 | Sony Corporation | Capteur optique et unite de disque optique |
| JP4859089B2 (ja) | 2005-03-14 | 2012-01-18 | 株式会社リコー | 抽出光学系、光ピックアップ装置及び光ディスク装置 |
| JP2006260669A (ja) | 2005-03-16 | 2006-09-28 | Ricoh Co Ltd | 光情報記録再生装置及び記録媒体 |
| JP4618725B2 (ja) * | 2005-11-08 | 2011-01-26 | 株式会社リコー | 光ピックアップ装置及び光ディスク装置 |
| JP4561706B2 (ja) * | 2005-11-16 | 2010-10-13 | 日本ビクター株式会社 | 光ピックアップ装置 |
| JP4433315B2 (ja) * | 2006-01-12 | 2010-03-17 | ソニー株式会社 | 光ピックアップ及び光情報装置 |
| US7567495B2 (en) * | 2006-10-18 | 2009-07-28 | Hitachi Media Electronics Co., Ltd. | Optical pickup apparatus and optical disc apparatus using same |
| WO2008053548A1 (fr) * | 2006-11-01 | 2008-05-08 | Pioneer Corporation | Dispositif de captage |
| JP2008130167A (ja) * | 2006-11-21 | 2008-06-05 | Sanyo Electric Co Ltd | 光ピックアップ装置 |
| JP2008217882A (ja) | 2007-03-02 | 2008-09-18 | Matsushita Electric Ind Co Ltd | 光ピックアップおよび光ディスク装置、コンピュータ、光ディスクプレーヤ、光ディスクレコーダ |
| JP4893314B2 (ja) * | 2007-01-09 | 2012-03-07 | 株式会社Jvcケンウッド | 光ピックアップ装置 |
| US20080165655A1 (en) * | 2007-01-09 | 2008-07-10 | Ryo Saitoh | Optical pickup device |
| JP2008276860A (ja) * | 2007-04-27 | 2008-11-13 | Hitachi Media Electoronics Co Ltd | 光ピックアップ装置及び光ディスクドライブ |
| WO2008139686A1 (ja) * | 2007-05-08 | 2008-11-20 | Panasonic Corporation | 光ピックアップ装置、光ディスク装置 |
| JP2009003986A (ja) * | 2007-06-19 | 2009-01-08 | Victor Co Of Japan Ltd | 光ピックアップ装置 |
| JP2009009630A (ja) * | 2007-06-27 | 2009-01-15 | Victor Co Of Japan Ltd | 光ピックアップ装置 |
| JP4610628B2 (ja) * | 2008-03-04 | 2011-01-12 | 三洋電機株式会社 | 光ピックアップ装置および焦点調整方法 |
-
2009
- 2009-07-31 JP JP2009178709A patent/JP4722205B2/ja not_active Expired - Fee Related
-
2010
- 2010-07-05 KR KR1020100064282A patent/KR101109951B1/ko not_active IP Right Cessation
- 2010-07-27 US US12/844,261 patent/US8040779B2/en not_active Expired - Fee Related
- 2010-07-28 CN CN2010102431545A patent/CN101989438B/zh not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101075449A (zh) * | 2006-05-16 | 2007-11-21 | 株式会社日立媒介电子 | 光盘驱动装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101109951B1 (ko) | 2012-02-14 |
| JP4722205B2 (ja) | 2011-07-13 |
| US20110026389A1 (en) | 2011-02-03 |
| JP2011034623A (ja) | 2011-02-17 |
| US8040779B2 (en) | 2011-10-18 |
| CN101989438A (zh) | 2011-03-23 |
| KR20110013219A (ko) | 2011-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4759617B2 (ja) | ピックアップ装置 | |
| CN101714365B (zh) | 光拾波器装置及光盘装置 | |
| JP4610628B2 (ja) | 光ピックアップ装置および焦点調整方法 | |
| US8472300B2 (en) | Optical head device and optical disc device | |
| CN101989437B (zh) | 光拾取装置、光盘装置及焦点调整方法 | |
| JP5173953B2 (ja) | 光ピックアップ装置および光ディスク装置 | |
| WO2007105767A1 (ja) | 光ヘッド装置 | |
| JP2013024951A (ja) | 光学装置 | |
| JP2010040086A (ja) | 光ピックアップ装置、焦点調整方法および光ディスク装置 | |
| CN101877230B (zh) | 光拾取装置以及光盘装置 | |
| JP4722190B2 (ja) | 光ピックアップ装置および光ディスク装置 | |
| JP2011008852A (ja) | 光ピックアップ装置 | |
| CN101989438B (zh) | 光拾取装置及光盘装置 | |
| CN101866665B (zh) | 光拾波装置和光盘装置 | |
| JPS61177645A (ja) | 焦点誤差制御装置 | |
| CN102034503A (zh) | 光拾波装置 | |
| JP2002170256A (ja) | 光ヘッド装置、記録及び/又は再生装置並びに記録及び/又は再生方法 | |
| CN102646429A (zh) | 光拾取装置和光盘装置 | |
| US20110261670A1 (en) | Optical pickup device and optical disc device | |
| JP5233706B2 (ja) | 位置誤差信号検出装置及び方法並びに光学的情報記録再生装置及び方法 | |
| JP5173868B2 (ja) | 光ピックアップ装置および光ディスク装置 | |
| JP3642972B2 (ja) | 光ピックアップの焦点誤差検出装置、及び光ピックアップの焦点誤差検出方法 | |
| CN101661763A (zh) | 光拾取装置以及光盘装置 | |
| JP2010049758A (ja) | 光ピックアップ装置 | |
| JPS62119738A (ja) | 焦点制御信号検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20121212 Termination date: 20140728 |
|
| EXPY | Termination of patent right or utility model |