WO2022131376A1 - 建設機械 - Google Patents
建設機械 Download PDFInfo
- Publication number
- WO2022131376A1 WO2022131376A1 PCT/JP2021/046841 JP2021046841W WO2022131376A1 WO 2022131376 A1 WO2022131376 A1 WO 2022131376A1 JP 2021046841 W JP2021046841 W JP 2021046841W WO 2022131376 A1 WO2022131376 A1 WO 2022131376A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- construction machine
- lever
- angle
- tilt
- grip portion
- Prior art date
Links
- 238000010276 construction Methods 0.000 title claims abstract description 34
- 230000003213 activating effect Effects 0.000 claims 1
- 239000003921 oil Substances 0.000 description 21
- 239000010720 hydraulic oil Substances 0.000 description 17
- 230000007257 malfunction Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000008602 contraction Effects 0.000 description 2
- 239000002828 fuel tank Substances 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 1
Images






Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
- E02F3/325—Backhoes of the miniature type
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/76—Graders, bulldozers, or the like with scraper plates or ploughshare-like elements; Levelling scarifying devices
- E02F3/80—Component parts
- E02F3/815—Blades; Levelling or scarifying tools
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/76—Graders, bulldozers, or the like with scraper plates or ploughshare-like elements; Levelling scarifying devices
- E02F3/7609—Scraper blade mounted forwardly of the tractor on a pair of pivoting arms which are linked to the sides of the tractor, e.g. bulldozers
- E02F3/7613—Scraper blade mounted forwardly of the tractor on a pair of pivoting arms which are linked to the sides of the tractor, e.g. bulldozers with the scraper blade adjustable relative to the pivoting arms about a vertical axis, e.g. angle dozers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/76—Graders, bulldozers, or the like with scraper plates or ploughshare-like elements; Levelling scarifying devices
- E02F3/7609—Scraper blade mounted forwardly of the tractor on a pair of pivoting arms which are linked to the sides of the tractor, e.g. bulldozers
- E02F3/7618—Scraper blade mounted forwardly of the tractor on a pair of pivoting arms which are linked to the sides of the tractor, e.g. bulldozers with the scraper blade adjustable relative to the pivoting arms about a horizontal axis
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/96—Dredgers; Soil-shifting machines mechanically-driven with arrangements for alternate or simultaneous use of different digging elements
- E02F3/963—Arrangements on backhoes for alternate use of different tools
- E02F3/964—Arrangements on backhoes for alternate use of different tools of several tools mounted on one machine
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
- E02F9/2012—Setting the functions of the control levers, e.g. changing assigned functions among operations levers, setting functions dependent on the operator or seat orientation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G1/00—Controlling members, e.g. knobs or handles; Assemblies or arrangements thereof; Indicating position of controlling members
- G05G1/02—Controlling members for hand actuation by linear movement, e.g. push buttons
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G1/00—Controlling members, e.g. knobs or handles; Assemblies or arrangements thereof; Indicating position of controlling members
- G05G1/04—Controlling members for hand actuation by pivoting movement, e.g. levers
- G05G1/06—Details of their grip parts
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G9/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously
- G05G9/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only
- G05G9/04—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously
- G05G9/047—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks
- G05G2009/04774—Manually-actuated control mechanisms provided with one single controlling member co-operating with two or more controlled members, e.g. selectively, simultaneously the controlling member being movable in different independent ways, movement in each individual way actuating one controlled member only in which movement in two or more ways can occur simultaneously the controlling member being movable by hand about orthogonal axes, e.g. joysticks with additional switches or sensors on the handle
Definitions
- the present invention relates to construction machinery.
- the work machine of Patent Document 1 is provided on the lower traveling body so that the blade can be moved up and down, angled, and tilted.
- the working machine of Patent Document 1 lifts the blade by tilting the blade lever in the front-rear direction.
- the blade is tilted and angled by tilting the blade lever in the left-right direction.
- the tilt operation and the angle operation are switched by using the button switch at the tip of the blade lever.
- the tilt operation and the angle operation are tilting of the blade lever in the left-right direction, and the operations are common. Therefore, there is a possibility of malfunction. For example, you intend to perform a tilt operation, but you may mistakenly perform an angle operation.
- the present invention has been made in view of the above problems, and an object thereof is to provide a construction machine capable of suppressing the occurrence of malfunction.
- the construction machine includes a blade and an operation lever.
- the blade is provided on the airframe.
- the blade is configured to be capable of a plurality of operations.
- the operating lever operates the blade.
- the operation lever is configured so that the plurality of operations can be controlled by different operations.
- (A) is a front view of the third operating lever.
- (B) is a rear view of the third operating lever. It is a side view of the 3rd operation lever.
- FIG. 1 is a side view of the construction machine 1 of the present embodiment.
- the construction machine 1 of the present embodiment is a backhoe.
- the construction machine 1 of the present embodiment includes a machine body 2, a boom 3, an arm 4, a bucket 5, and a traveling device 7.
- the construction machine 1 of the present embodiment further includes a boom actuator 30, an arm actuator 40, and an attachment actuator 50.
- the aircraft 2 has a driver's seat 6.
- the worker sits in the driver's seat 6 and operates the construction machine 1.
- the machine body 2 is supported by the traveling device 7.
- the machine body 2 may be supported by the traveling device 7 so as to be able to turn freely.
- the airframe 2 is provided with an engine, a fuel tank, a battery, a hydraulic system, and a hydraulic oil tank. Further, the machine body 2 is provided with a bonnet for accommodating an engine, a fuel tank, a battery, a hydraulic system, and a hydraulic oil tank, and a driver's seat 6 is arranged on the bonnet.
- the boom 3 is swingably supported by the machine body 2 around the first rotation fulcrum P1. Specifically, the base end portion of the boom 3 is pivotally supported by the machine body 2.
- the first rotation fulcrum P1 is a rotation axis extending along the left-right direction when the driver's seat 6 is viewed from the front.
- the left-right direction when the driver's seat 6 is viewed from the front may be described as "left-right direction”.
- the boom actuator 30 operates the boom 3. Specifically, as the boom actuator 30 expands and contracts, the boom 3 swings around the first rotation fulcrum P1. Specifically, the boom actuator 30 is expanded and contracted by controlling the supply of the hydraulic oil to the boom actuator 30 and the discharge of the hydraulic oil from the boom actuator 30. Therefore, the boom actuator 30 expands and contracts depending on the hydraulic oil.
- the arm 4 is swingably supported by the boom 3 around the second rotation fulcrum P2. Specifically, the base end portion of the arm 4 is pivotally supported at the tip end portion of the boom 3.
- the second rotation fulcrum P2 is a rotation axis extending along the left-right direction.
- the arm actuator 40 operates the arm 4. Specifically, as the arm actuator 40 expands and contracts, the arm 4 swings around the second rotation fulcrum P2. Specifically, the arm actuator 40 is expanded and contracted by controlling the supply of the hydraulic oil to the arm actuator 40 and the discharge of the hydraulic oil from the arm actuator 40. Therefore, the arm actuator 40 expands and contracts depending on the hydraulic oil.
- Bucket 5 is a type of attachment.
- the bucket 5 is swingably supported by the arm 4 around the third rotation fulcrum P3.
- the bucket 5 is pivotally supported at the tip of the arm 4.
- the third rotation fulcrum P3 is a rotation axis extending along the left-right direction.
- the attachment actuator 50 operates the bucket 5. Specifically, as the attachment actuator 50 expands and contracts, the bucket 5 swings around the third rotation fulcrum P3. Specifically, the attachment actuator 50 is expanded and contracted by controlling the supply of the hydraulic oil to the attachment actuator 50 and the discharge of the hydraulic oil from the attachment actuator 50. Therefore, the attachment actuator 50 expands and contracts depending on the hydraulic oil.
- the traveling device 7 travels the construction machine 1.
- the traveling device 7 is a crawler type traveling device.
- the traveling device 7 has a blade 72.
- the blade 72 is provided on the machine body 2.
- the blade 72 is provided so as to extend in the vehicle body width direction (left-right direction).
- the blade 72 is arranged in front of the traveling device 7.
- FIG. 2 is a schematic perspective view of the traveling device 7 in the construction machine 1.
- the blade 72 is configured to be capable of a plurality of operations, that is, a lift operation, a tilt operation, and an angle operation.
- the lift operation indicates that the entire blade 72 operates in the vertical direction along the direction D1.
- the tilt operation indicates that the left and right ends of the blade 72 move in the vertical direction along the direction D2.
- the angle motion indicates that the left and right ends of the blade 72 move in the front-rear direction along the direction D3.
- FIG. 3 is a perspective view of the machine body 2 in the construction machine 1.
- the construction machine 1 further includes a control unit 8 and a display device 9.
- the control unit 8 and the display device 9 are provided on the airframe 2. Specifically, the control unit 8 and the display device 9 are arranged in front of the driver's seat 6.
- the control unit 8 includes various operation members for the operator to operate the construction machine 1.
- Various operating members include a first operating lever 81, a second operating lever 82, and a third operating lever 83.
- the operator manually operates the first operating lever 81, the second operating lever 82, and the third operating lever 83.
- the operator can operate the boom 3 and the bucket 5 by operating the first operating lever 81.
- the operator can operate the second operation lever 82 to operate the arm 4 and turn the machine body 2.
- the blade 72 can be operated by operating the third operation lever 83.
- the third operating lever 83 is an example of the "operating lever" according to the present invention.
- the display device 9 displays various screens.
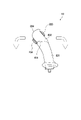
- FIG. 4A is a front view of the third operating lever 83.
- FIG. 4B is a rear view of the third operating lever 83.
- FIG. 5 is a side view of the third operating lever 83.
- the third operation lever 83 has a lever body 831, a grip portion 832, and an operation switch 833.
- the third operating lever 83 operates the blade 72.
- the third operation lever 83 is configured to be able to control a plurality of operations of the blade 72, for example, an angle operation and a tilt operation by different operations.
- the third operation lever 83 is configured to be able to operate an angle operation (one of a plurality of operations) and a tilt operation (another operation) in the same direction.
- the different operations refer to, for example, the operation of different parts in the third operation lever 83, one of which is the operation of the lever main body 831 and the other of which is the operation of the operation switch 833. Further, even if the operation of the same portion (for example, the lever main body 831) in the third operation lever 83 is performed, if the operation directions are different, the operation is different.
- the lever body 831 can be operated in at least one direction (for example, front / back / left / right).
- the operation of the lever main body 831 includes, for example, an operation of tilting the lever main body 831 and an operation of rotating the lever main body 831 in a predetermined direction.
- the direction in which the back surface of the lever body 831 is rotated to the right is the right rotation direction
- the direction in which the lever body is rotated to the left is the left rotation direction.
- the grip portion 832 is arranged at the tip of the lever body 831.
- the operation switch 833 is arranged on the grip portion 832. Specifically, the operation switch 833 is arranged on the front side of the grip portion 832. For example, the front side is the side on which the driver's seat 6 is located.
- the operation switch 833 is formed so as to be operable in a predetermined direction (for example, left / right, up / down) with respect to the grip portion 832.
- the operation switch 833 is a roller switch or a slide switch.
- the tilt operation is executed when the operation switch 833 is operated left and right (in the direction of the arrow in the figure). Specifically, the tilt operation is executed by sliding the operation switch 833 left and right by the fingertip of the operator.
- the third operating lever 83 further includes a changeover switch 834.
- the changeover switch 834 is arranged on the back side of the grip portion 832.
- the back side is the side far from the driver's seat 6.
- the changeover switch 834 is configured to be pressable. Since the changeover switch 834 is arranged on the back side of the grip portion 832, the changeover switch 834 is located at a position where the operator's index finger touches when the operator grips the grip portion 832. Therefore, it is easy to press the changeover switch 834.
- the changeover switch 834 enables any one of a plurality of operations (angle operation) and another operation (tilt operation). In the present embodiment, the tilt operation is invalidated and the angle operation is enabled by operating the changeover switch 834.
- the tilt operation is invalidated and the angle operation is enabled.
- the angle operation is executed by tilting the grip portion 832 of the third operation lever 83 at the same time as the operation of the changeover switch 834. That is, the angle operation is executed by the operator tilting the grip portion 832 of the third operation lever 83 while pressing the changeover switch 834.
- the lift operation is executed by tilting the grip portion 832 of the third operating lever 83 back and forth.
- the grip portion 832 is formed so as to be inclined downward from the base end portion 835 toward the tip end portion 836. Therefore, the operator can easily tilt the third operation lever 83 back and forth.
- one of the tilt operation and the angle operation is executed.
- the other operation of the tilt operation and the angle operation is executed.
- one of the movements is an angle movement.
- the angle operation is executed by tilting the grip portion 832 in a predetermined direction.
- the other operation is a tilt operation. That is, the tilt operation is executed by operating the operation switch 833.
- the third operation lever 83 (operation lever) is configured so that the tilt operation and the angle operation can be controlled by different operations.
- the tilt operation is performed by the operation of the finger
- the angle operation is performed by the operation of the arm. Therefore, the possibility of malfunction can be suppressed.
- FIG. 6 is a circuit diagram showing the configuration of the hydraulic circuit for the angle operation and the tilt operation of the blade 72
- FIG. 7 is a circuit diagram showing the configuration of the hydraulic circuit for the lift operation of the blade 72.
- both circuits are separated for convenience of explanation, but circuits for lift operation, angle operation, and tilt operation may be integrally configured.
- the hydraulic circuit for angle operation and tilt operation includes an angle pilot valve 182, a tilt pilot valve 184, a tilt angle control valve 140, and a first switching valve 130 from the upstream side of the circuit. , A tilt cylinder 110 and an angle cylinder 120.
- the angle pilot valve 182 regulates the inflow of angle operation pilot oil into the tilt angle control valve 140.
- the hydraulic oil (pilot oil) can be sent to the tilt angle control valve 140 at a pressure (pilot pressure) corresponding to the operation amount of the grip portion 832 of the third operating lever 83.
- the angle pilot valve 182 is configured to be able to communicate with each other based on the operation signal from the third operation lever 83.
- the angle pilot valve 182 communicates with the third operating lever 83 by tilting it in the left-right direction.
- the pilot oil discharged by the pilot pump PB is output in the direction and flow rate according to the operation amount of the third operating lever 83.
- the tilt pilot valve 184 regulates the inflow of tilt operation pilot oil into the tilt angle control valve 140.
- the hydraulic oil (pilot oil) can be sent to the tilt angle control valve 140 at a pressure (pilot pressure) corresponding to the operation amount of the operation switch 833 of the third operation lever 83.
- the tilt pilot valve 184 is configured to be able to communicate with each other based on the operation signal from the operation switch 833.
- the tilt pilot valve 184 communicates with the operation switch 833 by operating the operation switch 833 in the left-right direction.
- the pilot oil discharged by the pilot pump PC is output in the direction and flow rate according to the operation amount of the operation switch 833.
- a shuttle valve 162 and a shuttle valve 164 are arranged between the angle pilot valve 182 and the tilt angle control valve 140, and between the tilt pilot valve 184 and the tilt angle control valve 140, respectively.
- the shuttle valves 162 and 164 optionally communicate either the tilt operation pilot oil or the angle operation pilot oil with the tilt angle control valve 140.
- the changeover switch 834 when the changeover switch 834 is not pressed, the angle operation pilot oil is not supplied to the shuttle valve 162, so that the tilt operation pilot oil is preferentially supplied to the tilt angle control valve 140.
- the changeover switch 834 is pressed, the angle operation pilot oil is preferentially supplied to the tilt angle control valve 140.
- a second switching valve 170 is arranged between the tilt angle control valve 140 and the angle pilot valve 182.
- the second switching valve 170 regulates the communication of the oil passage based on the switching signal from the changeover switch 834. Specifically, when the changeover switch 834 is pressed, the angle operation pilot oil output from the angle pilot valve 182 is supplied to the shuttle valve 162. On the other hand, when the changeover switch 834 is not pressed, the angle operation pilot oil output from the angle pilot valve 182 is discharged to the tank T.
- the tilt angle control valve 140 controls the supply and discharge of hydraulic oil to one of the tilt cylinder 110 and the angle cylinder 120, and controls the expansion and contraction operation of one of the tilt cylinder 110 and the angle cylinder 120. Specifically, the hydraulic oil discharged by the main pump PA is supplied to the tilt cylinder 110 or the angle cylinder 120 in a direction and flow rate corresponding to the tilt pilot signal (pilot oil) or the angle pilot signal (pilot oil).
- the first switching valve 130 selects one of the tilt cylinder 110 and the angle cylinder 120 and communicates with the tilt angle control valve 140. Specifically, the first switching valve 130 selects one of the tilt cylinder 110 and the angle cylinder 120 and communicates with the tilt angle control valve 140 depending on whether or not the changeover switch 834 is pressed. In the present embodiment, when the changeover switch 834 is not pressed, the first changeover valve 130 communicates the tilt cylinder 110 with the tilt angle control valve 140. On the other hand, when the changeover switch 834 is pressed, the first changeover valve 130 communicates the angle cylinder 120 with the tilt angle control valve 140.
- the tilt cylinder 110 tilts the blade 72 by expanding and contracting.
- the angle cylinder 120 causes the blade 72 to operate in an angle by expanding and contracting.
- the relief valve 150 is arranged between the first switching valve 130 and the tilt angle control valve 140.
- the relief valve 150 suppresses an excessive discharge pressure in the bottom chamber or rod chamber of the tilt cylinder 110 or the bottom chamber or rod chamber of the angle cylinder 120.
- the relief valve 150 is a circuit by flowing oil into the tank T when the tilt cylinder 110 or the angle cylinder 120 is pulled or pushed by the blade 72 hitting an obstacle and receiving an excessive impact. Internal pressure can be released.
- the hydraulic circuit for lift operation includes a lift pilot valve 282, a lift control valve 240, and a lift cylinder 210 from the upstream side of the circuit.
- the lift pilot valve 282 regulates the inflow of lift operation pilot oil into the lift control valve 240.
- the hydraulic oil (pilot oil) can be sent to the lift control valve 240 at a pressure (pilot pressure) corresponding to the operation amount of the grip portion 832 of the third operating lever 83.
- the lift pilot valve 282 is configured to be able to communicate with each other based on the operation signal from the third operation lever 83.
- the lift pilot valve 282 communicates with the third operating lever 83 by tilting it in the front-rear direction.
- the pilot oil discharged by the pilot pump PE is output in the direction and flow rate according to the operation amount of the third operating lever 83.
- the lift control valve 240 controls the expansion and contraction operation of the lift cylinder 210. Specifically, the hydraulic oil discharged by the main pump PD is supplied to the lift cylinder 210 in the direction and flow rate according to the lift pilot signal (pilot oil).
- the lift cylinder 210 lifts the blade 72 by expanding and contracting.
- the relief valve 250 is arranged between the lift cylinder 210 and the lift control valve 240.
- the relief valve 250 suppresses an excessive discharge pressure in the bottom chamber or rod chamber of the lift cylinder 210.
- FIGS. 1 to 7 The embodiments of the present invention have been described above with reference to the drawings (FIGS. 1 to 7). However, the present invention is not limited to the above embodiment, and can be implemented in various embodiments without departing from the gist thereof.
- the drawings are schematically shown mainly for each component for easy understanding, and the thickness, length, number, etc. of each of the illustrated components are different from the actual ones for the convenience of drawing creation. .. Further, the material, shape, dimensions, etc. of each component shown in the above embodiment are merely examples, and are not particularly limited, and various changes can be made without substantially deviating from the effects of the present invention. be.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Operation Control Of Excavators (AREA)
- Mechanical Control Devices (AREA)
Abstract
Description
2 機体
72 ブレード
83 第3操作レバー(操作レバー)
831 レバー本体
832 グリップ部
833 操作スイッチ
834 切換スイッチ
835 基端部
836 先端部
Claims (12)
- 機体に設けられ、複数の動作が可能に構成されたブレードと、
前記ブレードを操作する操作レバーと
を備え、
前記操作レバーは、前記複数の動作をそれぞれ異なる操作により制御可能に構成された、建設機械。 - 前記操作レバーは、前記複数の動作をそれぞれ同方向に操作可能に構成された、請求項1に記載の建設機械。
- 前記操作レバーは、
少なくとも一方向に操作可能なレバー本体と、
前記レバー本体の先端部に配置されたグリップ部と、
前記グリップ部に配置された操作スイッチと
を有し、
前記グリップ部の所定方向への操作により、前記複数の動作のうちの一の動作が実行され、
前記操作スイッチの操作により、前記複数の動作うちの他の動作が実行される、請求項1または請求項2に記載の建設機械。 - 前記一の動作は、アングル動作であり、
前記他の動作は、チルト動作である、請求項3に記載の建設機械。 - 前記操作スイッチは、前記グリップ部に対して左右に操作可能に形成されている、請求項3または請求項4に記載の建設機械。
- 前記操作スイッチは、前記グリップ部の正面側に配置されている、請求項3から請求項5のいずれか1項に記載の建設機械。
- 前記操作レバーは、前記複数の動作のいずれかを有効化する切換スイッチをさらに有する、請求項3から請求項6のいずれか1項に記載の建設機械。
- 前記切換スイッチの操作により、前記一の動作を有効化するとともに、前記他の動作を無効化するように構成された、請求項7に記載の建設機械。
- 前記切換スイッチの操作と同時に前記グリップ部を操作したときに、前記一の動作が実行される、請求項7または請求項8に記載の建設機械。
- 前記切換スイッチは、押下可能に構成されている、請求項7から請求項9のいずれか1項に記載の建設機械。
- 前記切換スイッチは、前記グリップ部の背面側に配置されている、請求項7から請求項10のいずれか1項に記載の建設機械。
- 前記グリップ部は、基端部から先端部に向けて、下方傾斜して形成されている、請求項3から請求項11のいずれか1項に記載の建設機械。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020237018529A KR20230118823A (ko) | 2020-12-18 | 2021-12-17 | 건설 기계 |
| US18/037,052 US20240026642A1 (en) | 2020-12-18 | 2021-12-17 | Construction Machine |
| EP21906734.5A EP4265850A1 (en) | 2020-12-18 | 2021-12-17 | Construction machine |
| CN202180083932.5A CN116685744A (zh) | 2020-12-18 | 2021-12-17 | 工程机械 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020210240A JP7365323B2 (ja) | 2020-12-18 | 2020-12-18 | 建設機械 |
| JP2020-210240 | 2020-12-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022131376A1 true WO2022131376A1 (ja) | 2022-06-23 |
Family
ID=82057631
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/046841 WO2022131376A1 (ja) | 2020-12-18 | 2021-12-17 | 建設機械 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20240026642A1 (ja) |
| EP (1) | EP4265850A1 (ja) |
| JP (1) | JP7365323B2 (ja) |
| KR (1) | KR20230118823A (ja) |
| CN (1) | CN116685744A (ja) |
| WO (1) | WO2022131376A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4403710A1 (en) * | 2022-12-27 | 2024-07-24 | Kubota Corporation | Operating device for working vehicle and working vehicle |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005207196A (ja) | 2004-01-26 | 2005-08-04 | Shin Caterpillar Mitsubishi Ltd | 作業機械 |
| JP2019167686A (ja) * | 2018-03-22 | 2019-10-03 | 株式会社日立建機ティエラ | 建設機械 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08270017A (ja) * | 1995-03-31 | 1996-10-15 | Mitsubishi Heavy Ind Ltd | 作業機の操作レバー及びブルドーザ |
| JPH11191014A (ja) * | 1997-12-26 | 1999-07-13 | Mitsubishi Agricult Mach Co Ltd | 操作レバーのグリップ構造 |
| JP6129008B2 (ja) * | 2013-07-22 | 2017-05-17 | 株式会社クボタ | ドーザレバー |
-
2020
- 2020-12-18 JP JP2020210240A patent/JP7365323B2/ja active Active
-
2021
- 2021-12-17 US US18/037,052 patent/US20240026642A1/en active Pending
- 2021-12-17 CN CN202180083932.5A patent/CN116685744A/zh active Pending
- 2021-12-17 EP EP21906734.5A patent/EP4265850A1/en active Pending
- 2021-12-17 WO PCT/JP2021/046841 patent/WO2022131376A1/ja active Application Filing
- 2021-12-17 KR KR1020237018529A patent/KR20230118823A/ko unknown
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005207196A (ja) | 2004-01-26 | 2005-08-04 | Shin Caterpillar Mitsubishi Ltd | 作業機械 |
| JP2019167686A (ja) * | 2018-03-22 | 2019-10-03 | 株式会社日立建機ティエラ | 建設機械 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4265850A1 (en) | 2023-10-25 |
| CN116685744A (zh) | 2023-09-01 |
| JP7365323B2 (ja) | 2023-10-19 |
| KR20230118823A (ko) | 2023-08-14 |
| US20240026642A1 (en) | 2024-01-25 |
| JP2022096946A (ja) | 2022-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7730646B2 (en) | Swivel work machine | |
| EP2987672A1 (en) | Operation control system | |
| JP5870205B2 (ja) | 液圧制御装置 | |
| JP4494318B2 (ja) | 作業機 | |
| KR101767857B1 (ko) | 작업 기계의 유압 시스템 | |
| WO2022131376A1 (ja) | 建設機械 | |
| JP5980602B2 (ja) | 油圧作動装置 | |
| KR101846030B1 (ko) | 건설기계의 어태치먼트 제어장치 | |
| EP1650359A2 (en) | Multiple mode operational system for work vehicle braking or propulsion | |
| JP4494319B2 (ja) | 作業機 | |
| JP6776590B2 (ja) | クレーン | |
| JP4430574B2 (ja) | 把持力制御装置および作業機械 | |
| JP5757690B2 (ja) | 作業機 | |
| JP6896558B2 (ja) | 作業機械 | |
| JP2009062793A (ja) | 建設機械 | |
| JP6718371B2 (ja) | 油圧作動装置 | |
| WO2018159210A1 (ja) | 建設機械 | |
| JP3420503B2 (ja) | 油圧ショベル | |
| JP7094679B2 (ja) | 作業車両 | |
| JP2022041636A (ja) | 作業機械 | |
| JP5205227B2 (ja) | 作業車両の作業機操作装置 | |
| US20210270012A1 (en) | Work machine and motor grader | |
| WO2024004300A1 (ja) | 油圧制御装置 | |
| JP4521866B2 (ja) | 建設機械の油圧制御装置 | |
| JP6894334B2 (ja) | 作業車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21906734 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18037052 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202180083932.5 Country of ref document: CN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021906734 Country of ref document: EP Effective date: 20230718 |