WO2022038741A1 - 運転支援装置および運転支援方法 - Google Patents
運転支援装置および運転支援方法 Download PDFInfo
- Publication number
- WO2022038741A1 WO2022038741A1 PCT/JP2020/031441 JP2020031441W WO2022038741A1 WO 2022038741 A1 WO2022038741 A1 WO 2022038741A1 JP 2020031441 W JP2020031441 W JP 2020031441W WO 2022038741 A1 WO2022038741 A1 WO 2022038741A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- driving
- control unit
- support
- driver
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 24
- 230000009471 action Effects 0.000 claims description 49
- 238000013459 approach Methods 0.000 claims description 10
- 230000004397 blinking Effects 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 21
- 230000008569 process Effects 0.000 description 15
- 230000006870 function Effects 0.000 description 14
- 230000007794 irritation Effects 0.000 description 13
- 238000001514 detection method Methods 0.000 description 12
- 230000002093 peripheral effect Effects 0.000 description 10
- 230000000694 effects Effects 0.000 description 6
- 230000004048 modification Effects 0.000 description 6
- 238000012986 modification Methods 0.000 description 6
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images


























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W40/09—Driving style or behaviour
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/04—Traffic conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0051—Handover processes from occupants to vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/30—Driving style
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
Definitions
- This disclosure relates to a driving support device and a driving support method that provide appropriate driving support to a driver who has performed dangerous driving.
- Patent Document 1 the distance information between the own vehicle and another vehicle traveling in front of the own vehicle (first information), the left and right lines for dividing the traveling lane of the own vehicle, and the left-right direction of the own vehicle.
- Information indicating the relative positional relationship of the vehicle (second information) is acquired, the distance between vehicles is determined to be short based on the first information, and an abnormality (unusual) is determined based on the second information and statistical values.
- an abnormality is determined based on the second information and statistical values.
- dangerous driving includes driving that the driver of the own vehicle intentionally performs with respect to other vehicles, and driving that is not intended by the driver of the own vehicle but irritates the driver of the other vehicle. Will be. For example, if a warning sound is emitted to a driver who is driving in a hurry, the driver may be stroked backwards, and more dangerous driving may be performed. On the other hand, if a warning sound is emitted to a driver who is driving in an irritated manner, the driver may notice his / her driving situation and change his / her driving. Therefore, it is considered effective to provide driving support to the driver of the own vehicle according to each of the agitated driving and the irritated driving.
- Patent Document 1 since the notification is made uniformly without distinguishing between the fanning operation and the irritating operation, the above problem may occur. Therefore, in Patent Document 1, it cannot be said that appropriate driving support is provided to a driver who has performed a fanning operation or an irritated operation.
- the present disclosure has been made to solve such a problem, and is a driving support device and a driving support method capable of providing appropriate driving support to a driver who has been driving in a hurry or in an irritated manner.
- the purpose is to provide.
- the driving support device includes driving that the driver of the own vehicle intentionally performs with respect to another vehicle, and driving of another vehicle that is not the intention of the driver of the own vehicle.
- Driving of own vehicle according to the driving situation judgment unit that judges the driving situation including the frustrating driving that irritates the person, and the case where the driving situation judgment unit judges that the driving is a fanning operation and the case where the driving situation is judged to be annoying driving. It is equipped with a support control unit that controls to support the driving of a person.
- the driving support device controls to support the driving of the driver of the own vehicle according to the case where the driving situation judgment unit determines that the driving is agitated and the case where the driving is determined to be annoying. It is possible to provide appropriate driving support to a driver who has been agitated or irritated.
- FIG. It is a block diagram which shows an example of the structure of the driving support device by Embodiment 1.
- FIG. It is a block diagram which shows an example of the structure of the driving support device by Embodiment 1.
- FIG. It is a figure which shows an example of the driving support by Embodiment 1.
- FIG. It is a figure which shows an example of the driving support by Embodiment 1.
- FIG. It is a figure which shows an example of the driving support by Embodiment 1.
- FIG. It is a figure which shows an example of the driving support by Embodiment 1.
- FIG. It is a figure which shows an example of the driving support by Embodiment 1.
- FIG. It is a flowchart which shows an example of the operation of the driving support apparatus by Embodiment 1.
- FIG. It is a block diagram which shows an example of the structure of the driving support device by the modification of Embodiment 1.
- FIG. It is a block diagram which shows an example of the structure of the driving support device by Embodiment 2.
- Embodiment 2 It is a figure which shows an example of the driving support by Embodiment 2.
- FIG. It is a figure which shows an example of the driving support by Embodiment 2.
- FIG. It is a figure which shows an example of the driving support by Embodiment 2.
- FIG. It is a figure which shows an example of the driving support by Embodiment 2.
- FIG. It is a figure which shows an example of the driving support by Embodiment 2.
- FIG. It is a flowchart which shows an example of the operation of the driving support apparatus by Embodiment 2.
- FIG. 1 It is a block diagram which shows an example of the structure of the driving support device by the modification of Embodiment 2. It is a block diagram which shows an example of the structure of the driving support device by Embodiment 3.
- FIG. It is a figure which shows an example of the driving support by Embodiment 3.
- FIG. It is a flowchart which shows an example of the operation of the driving support apparatus by Embodiment 3.
- FIG. It is a block diagram which shows an example of the structure of the driving support device by the modification of Embodiment 3.
- FIG. 4 It is a figure which shows an example of the driving support by Embodiment 4.
- FIG. It is a flowchart which shows an example of the operation of the driving support apparatus by Embodiment 4.
- FIG. It is a block diagram which shows an example of the structure of the driving support apparatus according to Embodiment 5. It is a block diagram which shows an example of the hardware composition of the driving support apparatus according to Embodiments 1-5. It is a block diagram which shows an example of the hardware composition of the driving support apparatus according to Embodiments 1-5. It is a block diagram which shows an example of the structure of the driving support system by Embodiment 1-5.
- FIG. 1 is a block diagram showing an example of the configuration of the driving support device 1 according to the first embodiment. Note that FIG. 1 shows the minimum necessary configuration for configuring the driving support device according to the first embodiment. It is assumed that the driving support device 1 is mounted in a vehicle (hereinafter referred to as "own vehicle").
- the driving support device 1 includes a driving status determination unit 2 and a support control unit 3.
- the driving situation determination unit 2 includes a driving operation intentionally performed by the driver of the own vehicle with respect to another vehicle and an irritating driving that is not intended by the driver of the own vehicle but irritates the driver of the other vehicle. Judge the driving situation.
- the support control unit 3 controls to support the driving of the driver of the own vehicle according to each of the case where the driving situation determination unit 2 determines that the driving is agitated and the case where the driving is determined to be annoying.
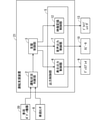
- FIG. 2 is a block diagram showing an example of the configuration of the driving support device 4 according to another configuration.
- the driving support device 4 includes a driving status determination unit 2, a support control unit 3, and an output control unit 5.
- the output control unit 5 includes a display output control unit 6 and an audio output control unit 7. Further, the driving condition determination unit 2 is connected to the vehicle sensor 8, the display output control unit 6 is connected to the display 9, and the audio output control unit 7 is connected to the speaker 10.
- the vehicle sensor 8 detects the situation around the own vehicle including the relative position of the other vehicle with respect to the own vehicle and the own vehicle and the lane in which the other vehicle is traveling. Further, the vehicle sensor 8 may obtain the relative speed of the other vehicle based on the time-series change of the relative position of the other vehicle.
- the vehicle sensor 8 may be, for example, a camera.
- the vehicle sensor 8 is a camera, it is possible to detect the relative position of the other vehicle with respect to the own vehicle and the lane in which the own vehicle and the other vehicle are traveling by performing image processing on the image taken around the own vehicle. can.
- the driving status determination unit 2 determines the driving status including the agitated driving and the irritated driving based on the information acquired from the vehicle sensor 8. Specifically, the driving situation determination unit 2 states that when the own vehicle has executed a specific action for the same other vehicle more than a predetermined number of times, the driver of the own vehicle is driving in a hurry. to decide. Further, the driving situation determination unit 2 determines that the driver of the own vehicle is irritating and driving when the own vehicle temporarily executes a specific action with respect to the same other vehicle.
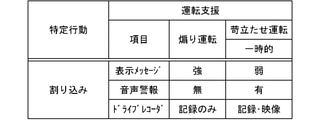
- Examples of the specific action referred to by the driving situation determination unit 2 when determining the driving in a hurry and the irritated driving include each specific action shown in FIGS. 3 to 7. That is, as specific actions, for example, “driving to occupy the overtaking lane", “tailgating", “interruption”, “approaching the vehicle in front”, “driving to the vehicle in front”, “driving to the vehicle in the rear” “Sudden braking” and “staggering driving to the vehicle behind” can be mentioned.
- each specific action shown in FIGS. 3 to 7 is an example, and other driving may be a specific action. For example, driving in a situation where the own vehicle and another vehicle are on a road that cannot be overtaken and the own vehicle is in front of the other vehicle may be a specific action.
- the driving situation determination unit 2 determines whether or not both the own vehicle and the other vehicle are in the overtaking lane based on the information of the lane in which the own vehicle and the other vehicle are traveling acquired from the vehicle sensor 8. to decide. Further, the driving situation determination unit 2 determines whether or not the own vehicle exists in front of the other vehicle based on the information on the relative position of the other vehicle with respect to the own vehicle acquired from the vehicle sensor 8.
- the driving situation determination unit 2 determines that the driver of the own vehicle is performing "driving that occupies the overtaking lane", what kind of "driving that occupies the overtaking lane" is performed. Based on this, determine whether you are driving in a hurry or in an irritated state. Specifically, the driving situation determination unit 2 determines that the driver of the own vehicle is performing the driving while repeatedly executing the "driving that occupies the overtaking lane" more than a predetermined number of times. do. Further, the driving situation determination unit 2 determines that the driver of the own vehicle is performing annoying driving when the driver of the own vehicle is temporarily performing "driving that occupies the overtaking lane".
- the "width-alignment" shown in FIG. 4 is to perform a width-alignment operation with respect to another vehicle in which the own vehicle is traveling in the adjacent lane. Specifically, in a situation where the own vehicle and another vehicle are in lanes adjacent to each other and the own vehicle and the other vehicle are running in parallel, the driver of the own vehicle brings the own vehicle closer to the other vehicle. Is to do. Such traveling of the own vehicle is traveling in which the own vehicle approaches another vehicle to a predetermined distance or less, and the other vehicle causes an avoidance action with respect to the own vehicle.
- the driving situation determination unit 2 determines whether or not the own vehicle and the other vehicle are in lanes adjacent to each other based on the information of the lane in which the own vehicle and the other vehicle are traveling acquired from the vehicle sensor 8. to decide. Further, the driving situation determination unit 2 determines whether or not the own vehicle and the other vehicle are running in parallel based on the information on the relative position of the other vehicle with respect to the own vehicle acquired from the vehicle sensor 8.
- the driving situation determination unit 2 performs a fanning operation or an irritated operation based on what kind of "width adjustment” is performed. Determine which one you are doing. Specifically, the driving situation determination unit 2 determines that the driver of the own vehicle is performing the driving when the driver of the own vehicle repeatedly executes the "width adjustment" more than a predetermined number of times. In addition, the driving situation determination unit 2 determines that the driver of the own vehicle is irritating and driving when the driver of the own vehicle is temporarily performing "tailgating".
- the "interruption" shown in FIG. 5 is to perform an operation in which the own vehicle suddenly invades in front of another vehicle and interrupts. Specifically, in a situation where the own vehicle and another vehicle are traveling in different lanes, the driver of the own vehicle suddenly interrupts the own vehicle in front of the other vehicle. Such traveling of the own vehicle is traveling in which the own vehicle approaches the other vehicle to a predetermined distance or less, and the other vehicle causes the other vehicle to take an evasive action against the own vehicle. In this case, the driving situation determination unit 2 determines whether or not the own vehicle and the other vehicle are in different lanes based on the information of the lane in which the own vehicle and the other vehicle are traveling acquired from the vehicle sensor 8. .. Further, the driving situation determination unit 2 determines whether or not the own vehicle suddenly cuts in front of the other vehicle based on the information on the relative position of the other vehicle with respect to the own vehicle acquired from the vehicle sensor 8.
- the driving situation determination unit 2 determines that the driver of the own vehicle is performing the "interruption"
- either the driving or the frustrating driving is performed based on what kind of "interruption” is being performed. Determine if you are doing it.
- the driving situation determination unit 2 determines that the driver of the own vehicle is performing the driving when the driver of the own vehicle repeatedly executes the "interruption" more than a predetermined number of times. Further, the driving situation determination unit 2 determines that the driver of the own vehicle is performing annoying driving when the "interruption" is temporarily executed.
- the “approach to the vehicle in front” shown in FIG. 6 means that the own vehicle approaches another vehicle in the same lane within a predetermined distance. Further, “staggering driving to a vehicle in front” is driving in which the own vehicle approaches another vehicle in the same lane while staggering within a predetermined distance. Such traveling of the own vehicle is traveling in which the own vehicle approaches the other vehicle to a predetermined distance or less, and the other vehicle causes the other vehicle to take an evasive action against the own vehicle. In this case, the driving situation determination unit 2 determines whether or not the own vehicle and the other vehicle are in the same lane based on the information of the lane in which the own vehicle and the other vehicle are traveling acquired from the vehicle sensor 8. .. Further, the driving situation determination unit 2 determines whether or not the own vehicle has approached the preceding other vehicle within a predetermined distance based on the information on the relative position of the other vehicle with respect to the own vehicle acquired from the vehicle sensor 8. To judge.
- the driving situation determination unit 2 determines that the driver of the own vehicle is "approaching the vehicle in front” or “driving staggering to the vehicle in front”, what kind of “approach to the vehicle in front” or Based on whether the vehicle is “staggering to the vehicle in front”, it is determined whether the driver is driving in a hurry or in an irritated state. Specifically, the driving situation determination unit 2 is agitated when the driver of the own vehicle repeatedly executes "approaching the vehicle in front” or “driving to the vehicle in front” more than a predetermined number of times. Judge that you are driving. In addition, the driving situation determination unit 2 determines that the driver of the own vehicle is performing annoying driving when the driver of the own vehicle is temporarily executing "approaching the vehicle in front” or “driving to the vehicle in front”. do.
- “Sudden braking to the rear vehicle” shown in FIG. 7 means that the own vehicle and the other vehicle are driving in the same lane and the own vehicle suddenly brakes in front of the other vehicle.
- “staggering driving to the rear vehicle” is driving in which the own vehicle approaches the other vehicle behind while staggering within a predetermined distance in a situation where the own vehicle and another vehicle are traveling in the same lane. Is to do.
- Such traveling of the own vehicle is traveling in which the own vehicle approaches the other vehicle to a predetermined distance or less, and the other vehicle causes the other vehicle to take an evasive action against the own vehicle.
- the driving situation determination unit 2 determines whether or not the own vehicle and the other vehicle are in the same lane based on the information of the lane in which the own vehicle and the other vehicle are traveling acquired from the vehicle sensor 8. .. Further, the driving situation determination unit 2 determines whether or not the own vehicle has suddenly braked in front of the other vehicle based on the information on the relative position of the other vehicle with respect to the own vehicle acquired from the vehicle sensor 8.
- the driving situation determination unit 2 determines that the driver of the own vehicle is performing "sudden braking to the rear vehicle” or “staggering driving to the rear vehicle", what kind of “sudden braking to the rear vehicle” is performed. Based on whether you are driving "staggering to the vehicle behind” or “driving in a hurry” or “driving in an irritated manner", it is determined. Specifically, the driving situation determination unit 2 is when the driver of the own vehicle repeatedly executes "sudden braking to the rear vehicle” or “staggering driving to the rear vehicle” more than a predetermined number of times. Judge that you are driving in a fan. Further, the driving situation determination unit 2 states that the driver of the own vehicle is performing annoying driving when the driver of the own vehicle is temporarily executing "sudden braking to the rear vehicle” or “staggering driving to the rear vehicle”. to decide.
- the support control unit 3 supports the driver of the own vehicle according to the case where the driving condition determination unit 2 determines that the driving is a fan and the case where the driving is determined to be annoying. Take control. Specifically, the support control unit 3 controls at least one of the display output control unit 6 and the voice output control unit 7 to support the driving of the driver of the own vehicle.
- the output control unit 5 has a display output control unit 6 and an audio output control unit 7.
- the display output control unit 6 controls the display 9 so as to display the support information for supporting the driving to the driver according to the instruction from the support control unit 3.
- the voice output control unit 7 controls the speaker 10 so as to output the support information by voice to the driver according to the instruction from the support control unit 3.
- the support control unit 3 displays a display output control unit 6 so as to display a strong display message. To instruct. At this time, the support control unit 3 does not instruct the voice output control unit 7.
- the display output control unit 6 controls the display 9 so as to display a strong display message as support information for the driver. On the display 9, for example, a display message such as "Warning: It is determined that the driver occupies the overtaking lane. Please pause in an empty space.” Is displayed.
- the support control unit 3 instructs the display output control unit 6 to display a weak display message. , Instruct the voice output control unit 7 to output the support information by voice.
- the display output control unit 6 controls the display 9 so as to display a weak display message as support information for the driver. On the display 9, for example, a display message such as "Caution: It is determined that the vehicle occupies the overtaking lane. Let's drive in the driving lane as much as possible.” Is displayed.
- the voice output control unit 7 controls the speaker 10 so as to output the support information having the same content as the display message by voice. Support information having the same content as the display message is output by voice from the speaker 10.
- the support control unit 3 instructs the display output control unit 6 to display a strong display message.
- the support control unit 3 does not instruct the voice output control unit 7.
- the display output control unit 6 controls the display 9 so as to display a strong display message as support information for the driver.
- a display message such as "Warning: It is determined that the vehicle is close to the width. Please increase the distance from the next vehicle immediately.” Is displayed.
- the support control unit 3 instructs the display output control unit 6 to display a weak display message, and voices the support information. Instruct the audio output control unit 7 to output.
- the display output control unit 6 controls the display 9 so as to display a weak display message as support information for the driver.
- a display message such as "Caution: It is determined that the vehicle is close to the width. Let's keep a distance from the next vehicle.” Is displayed.
- the voice output control unit 7 controls the speaker 10 so as to output the support information having the same content as the display message by voice. Support information having the same content as the display message is output by voice from the speaker 10.
- the support control unit 3 instructs the display output control unit 6 to display a strong display message.
- the support control unit 3 does not instruct the voice output control unit 7.
- the display output control unit 6 controls the display 9 so as to display a strong display message as support information for the driver.
- a display message such as "Warning: It is determined that an interrupt has been interrupted. Please stop a sudden interrupt.” Is displayed on the display 9.
- the support control unit 3 instructs the display output control unit 6 to display a weak display message, and outputs the support information by voice.
- the voice output control unit 7 is instructed to do so.
- the display output control unit 6 controls the display 9 so as to display a weak display message as support information for the driver.
- a display message such as "Caution: It is determined that an interrupt has been interrupted. Avoid sudden interruptions.” Is displayed on the display 9.
- the voice output control unit 7 controls the speaker 10 so as to output the support information having the same content as the display message by voice. Support information having the same content as the display message is output by voice from the speaker 10.
- the support control unit 3 displays a strong display message. Instruct the display output control unit 6 to do so. At this time, the support control unit 3 does not instruct the voice output control unit 7.
- the display output control unit 6 controls the display 9 so as to display a strong display message as support information for the driver. On the display 9, for example, a display message such as "Warning: It is determined that the vehicle is approaching the vehicle in front. Please keep a distance from the vehicle in front.” Is displayed.
- the support control unit 3 displays a weak display message.
- the output control unit 6 is instructed, and the voice output control unit 7 is instructed to output the support information by voice.
- the display output control unit 6 controls the display 9 so as to display a weak display message as support information for the driver.
- a display message such as "Caution: It is determined that the vehicle is approaching the vehicle in front. Let's keep a distance from the vehicle in front.” Is displayed.
- the voice output control unit 7 controls the speaker 10 so as to output the support information having the same content as the display message by voice. Support information having the same content as the display message is output by voice from the speaker 10.
- the support control unit 3 issues a strong display message. Instruct the display output control unit 6 to display. At this time, the support control unit 3 does not instruct the voice output control unit 7.
- the display output control unit 6 controls the display 9 so as to display a strong display message as support information for the driver. On the display 9, for example, a display message such as "Warning: It is determined that the vehicle is approaching the vehicle behind. Please keep a distance from the vehicle behind.” Is displayed.
- the support control unit 3 displays a weak display message.
- the display output control unit 6 is instructed, and the voice output control unit 7 is instructed to output the support information by voice.
- the display output control unit 6 controls the display 9 so as to display a weak display message as support information for the driver.
- a display message such as "Caution: It is determined that the vehicle is approaching the vehicle behind. Let's keep a distance from the vehicle behind.” Is displayed.
- the voice output control unit 7 controls the speaker 10 so as to output the support information having the same content as the display message by voice. Support information having the same content as the display message is output by voice from the speaker 10.
- FIG. 8 is a flowchart showing an example of the operation of the driving support device 4.
- step S11 the driving condition determination unit 2 determines the driving condition including the fanned driving and the irritated driving based on the information acquired from the vehicle sensor 8.
- step S12 the driving situation determination unit 2 determines whether or not the driving situation is a driving or annoying driving. In the case of a fanning operation or an irritating operation, the process proceeds to step S13. On the other hand, if it is not a fanning operation or an irritating operation, the process proceeds to step S16.
- step S13 the driving situation determination unit 2 determines whether or not the driving is a fanning operation. In the case of the fanning operation, the process proceeds to step S14. On the other hand, if it is not a fanning operation, the process proceeds to step S15.
- step S14 the support control unit 3 provides driving support according to the fanning operation. For example, when the driving situation determination unit 2 determines that the specific action shown in FIGS. 3 to 7 is a driving operation, the support control unit 3 instructs the display output control unit 6 to display a strong display message, and controls the voice output. Do not instruct part 7. The display output control unit 6 controls the display 9 so as to display a strong display message. As a result, a strong display message is displayed on the display 9.
- step S15 the support control unit 3 provides driving support according to the frustrated driving.
- the support control unit 3 instructs the display output control unit 6 to display a weak display message, and outputs support information. Instruct the voice output control unit 7 to output voice.
- the display output control unit 6 controls the display 9 so as to display a weak display message.
- the voice output control unit 7 controls the speaker 10 so as to output the support information having the same content as the display message by voice. As a result, a weak display message is displayed on the display 9, and support information having the same content as the display message is output by voice from the speaker 10.
- step S16 the support control unit 3 does not provide driving support. That is, the support control unit 3 does not instruct the display output control unit 6 and the audio output control unit 7.
- FIG. 9 is a block diagram showing an example of the configuration of the driving support device 11 according to the modified example.
- the driving support device 11 is characterized in that the output control unit 5 has a video recording control unit 12.
- the video recording control unit 12 is connected to the drive recorder 13. Since other configurations and operations are the same as those of the driving support device 4 shown in FIG. 2, detailed description thereof will be omitted here.
- the video recording control unit 12 controls the drive recorder 13 so as to record an image of the driving condition when the driving condition determination unit 2 determines that the driving is a fanning operation or an irritated driving according to an instruction from the support control unit 3. Further, the video recording control unit 12 may control to record a video of the driving status when the driving status determining unit 2 determines that the driving is a fanning operation or an irritated operation on an external server (not shown).
- the drive recorder 13 records an image of the driving situation of the own vehicle according to an instruction from the image recording control unit 12.
- the image of the driving situation of the own vehicle may be taken by a camera included in the vehicle sensor 8 or may be taken by a camera (not shown) included in the drive recorder 13.
- the support control unit 3 instructs the display output control unit 6 as described above, and the own vehicle performs the driving operation.
- the video recording control unit 12 is instructed to record a video of the driving situation at the time of the trip.
- the video recording control unit 12 controls the drive recorder 13 so as to record a video of the driving situation when the own vehicle is driving in a fan.
- the drive recorder 13 records an image of the driving situation when the own vehicle is driving in a fanned manner.
- Such processing is performed in step S14 of FIG.
- the "recording only" of the drive recorder performs the process of only recording the image on the drive recorder 13.
- the support control unit 3 causes the display output control unit 6 and the voice output control unit 7 as described above. Instruct the video recording control unit 12 to record an image of the driving situation when the own vehicle is irritated and driven. As a result, the drive recorder 13 records an image of the driving situation when the own vehicle is irritated and driven. Such processing is performed in step S15 of FIG.
- the "recording / video" of the drive recorder is not only the process of recording the video on the drive recorder 13, but also the video recorded on the drive recorder 13 for the driver when the own vehicle is stopped. Inquire whether to confirm. In this case, for example, "A video of the driving situation when it is determined to be annoyed driving is recorded. Do you want to check the recorded video? Yes / No" may be displayed.
- the driver can check the video by operating the drive recorder in the own vehicle.
- the driver can check the video recorded on the drive recorder using a tablet device such as a smartphone.
- the video stored in the cloud server may be transmitted to the tablet device, or the video may be transmitted from the drive recorder to the tablet device.
- the driving situation determination unit 2 determines whether or not the own vehicle has performed a driving or annoying driving, and the support control unit 3 responds to the driving or annoying driving.
- the output control unit 5 is controlled so as to provide driving support. This makes it possible to provide appropriate driving support to the driver who has performed a fanning operation or an irritated operation.
- FIG. 10 is a block diagram showing an example of the configuration of the driving support device 14 according to the second embodiment.
- the driving support device 14 is characterized in that the output control unit 5 has a travel output control unit 15.
- the travel output control unit 15 is connected to a GNSS (Global Navigation Satellite System) system 16 and a travel control device 17.
- GNSS Global Navigation Satellite System
- the driving situation determination unit 2 determines whether the irritated driving is temporary or continuous. Since other configurations and operations are the same as those of the driving support device 4 shown in FIG. 2, detailed description thereof will be omitted here.
- the GNSS system 16 acquires map information from a map database (not shown), for example, and acquires the current position information of the own vehicle.
- the travel output control unit 15 controls the travel control device 17 so as to automatically control the travel of its own vehicle by using the information acquired from the GNSS system 16 in accordance with the instruction from the support control unit 3. Specifically, the travel output control unit 15 controls the travel control device 17 so as to automatically control the travel of the own vehicle based on the map information acquired from the GNSS system 16 and the current position information of the own vehicle. The travel control device 17 automatically controls the travel of the own vehicle according to the instruction from the travel output control unit 15.
- the driving status determination unit 2 determines the driving status including the agitated driving and the irritated driving based on the information acquired from the vehicle sensor 8. Further, when the driving situation determination unit 2 determines that the irritated operation is irritated, it determines whether the irritated operation is temporary or continuous. The driving situation determination unit 2 may determine the driving situation by further considering the map information acquired from the GNSS system 16 and the current position information of the own vehicle.
- the support control unit 3 has a display output control unit 6, a voice output control unit 7, and a travel output control unit so as to provide driving support corresponding to each of a fanning operation, a temporary irritation operation, and a continuous irritation operation. 15 is controlled.
- FIGS. 11 to 15 are the same as those in FIGS. 3 to 7 except for the driving support item "vehicle running control" and the frustrated driving "continuous", the description thereof is omitted here.
- the support control unit 3 instructs the travel output control unit 15 to automatically control the travel of the own vehicle only when the driving status determination unit 2 determines that the driving is continuous irritation.
- the travel output control unit 15 controls the travel control device 17 so as to automatically control the travel of the own vehicle by using the information acquired from the GNSS system 16.
- the travel control device 17 automatically controls the travel of the own vehicle so as to travel at a legal speed or less.
- the display 9 may show on the map that there is an empty space at the destination of the own vehicle.
- the travel control device 17 may be controlled so that the own vehicle automatically moves to an empty space existing in the travel destination of the own vehicle, or may be controlled so that the own vehicle automatically changes lanes. good.
- the travel control device 17 controls so as to keep the inter-vehicle distance from the adjacent other vehicle at a constant distance.
- the travel control device 17 controls to decelerate and move to the next lane.
- the travel control device 17 controls so as to keep the distance between the vehicle and the vehicle in front constant.
- the travel control device 17 controls so as to keep the distance between the vehicle and the vehicle behind the vehicle constant.
- the support control unit 3 controls the display output control unit 6 so as to make the display message different according to each of the temporary irritated operation and the continuous irritated operation.
- the display output control unit 6 controls the display 9 to display a weak display message in the case of a temporary irritated operation and a strong display message in the case of a continuous irritated operation.
- the contents of the weak display message and the strong display message in FIGS. 11 to 15 are the same as those in FIGS. 3 to 7.
- FIG. 16 is a flowchart showing an example of the operation of the driving support device 14. Since steps S21 to S24 in FIG. 16 correspond to steps S11 to S14 in FIG. 8, and step S28 in FIG. 16 corresponds to step S16 in FIG. 8, description thereof will be omitted here. Hereinafter, steps S25 to S27 will be described.
- step S25 the driving situation determination unit 2 determines whether or not the irritated driving is temporary. If the irritated operation is temporary, the process proceeds to step S26. On the other hand, if the irritated operation is not temporary, that is, if the irritated operation is continuous, the process proceeds to step S27.
- step S26 the support control unit 3 provides driving support according to the temporary irritated driving.
- the support control unit 3 instructs the display output control unit 6 to display a weak display message. Instruct the voice output control unit 7 to output the support information by voice. At this time, the support control unit 3 does not instruct the travel output control unit 15.
- the display output control unit 6 controls the display 9 so as to display a weak display message.
- the voice output control unit 7 controls the speaker 10 so as to output the support information having the same content as the display message by voice. As a result, a weak display message is displayed on the display 9, and support information having the same content as the display message is output by voice from the speaker 10.
- step S27 the support control unit 3 provides driving support according to continuous irritated driving.
- the support control unit 3 instructs the display output control unit 6 to display a strong display message.
- the voice output control unit 7 is instructed to output the support information by voice
- the travel output control unit 15 is instructed to automatically control the travel of the own vehicle.
- the display output control unit 6 controls the display 9 so as to display a strong display message.
- the voice output control unit 7 controls the speaker 10 so as to output the support information having the same content as the display message by voice.
- the travel output control unit 15 controls the travel control device 17 so as to automatically control the travel of the own vehicle. As a result, a weak display message is displayed on the display 9, and support information having the same content as the display message is output by voice from the speaker 10. Further, the travel control device 17 automatically controls the travel of the own vehicle.
- FIG. 17 is a block diagram showing an example of the configuration of the driving support device 18 according to the modified example.
- the driving support device 18 is characterized in that the output control unit 5 has a video recording control unit 12.
- Other configurations and operations are the same as those of the driving support device 14 shown in FIG. 10, and thus description thereof will be omitted here.
- the video recording control unit 12 controls the drive recorder 13 so as to record an image of the driving condition when the driving condition determination unit 2 determines that the driving is a fanning operation or an irritated driving according to an instruction from the support control unit 3.
- the drive recorder 13 records an image of the driving situation of the own vehicle according to an instruction from the image recording control unit 12.
- the support control unit 3 instructs the display output control unit 6 as described above, and the own vehicle performs the driving operation.
- the video recording control unit 12 is instructed to record a video of the driving situation at the time of the trip.
- the processing is the same as the processing of the video recording control unit 12 of FIG.
- the support control unit 3 has the display output control unit 6 and the display output control unit 6 as described above.
- the audio output control unit 7 is instructed, and the video recording control unit 12 is instructed to record an image of the driving situation when the own vehicle performs a temporary or continuous irritated driving.
- the processing is the same as the processing of the video recording control unit 12 of FIG.
- the driving situation determination unit 2 determines whether or not the own vehicle has been driven in a hurry or in an irritated manner, and in the case of the irritated driving, it is temporary or continuous. Judge whether it is. Further, the support control unit 3 controls the output control unit 5 so as to provide driving support according to each of the fanning operation, the temporary irritation operation, or the continuous irritation operation. This makes it possible to provide appropriate driving support to a driver who has performed a fanning operation, a temporary irritation operation, or a continuous irritation operation.
- FIG. 18 is a block diagram showing an example of the configuration of the driving support device 19 according to the third embodiment.
- the driving support device 19 is characterized in that the driving situation determination unit 2 determines the driving situation. Since other configurations and basic operations are the same as those of the first embodiment or the second embodiment, detailed description thereof will be omitted here.
- the driving status determination unit 2 is connected to the vehicle sensor 8 and the vehicle body device 20.
- the vehicle sensor 8 is the same as the vehicle sensor 8 described in the first and second embodiments.
- the vehicle body device 20 includes a horn that emits a warning sound, a headlight that irradiates light toward the front, and the like.
- the driving status determination unit 2 determines the driving status including the fanned driving and the irritated driving based on the information acquired from the vehicle sensor 8 and the vehicle body device 20. Further, when the driving situation determination unit 2 determines that the irritated operation is irritated, it determines whether the irritated operation is temporary or continuous.
- the driving situation determination unit 2 determines a driving or annoying driving based on the information acquired from the vehicle body device 20, for example, "warning sound or outburst of lighting" shown in FIG. 19 can be mentioned. Be done.
- each specific action shown in FIG. 19 is an example, and other driving may be a specific action.
- the "warning sound or outburst of lighting" shown in FIG. 19 means that the driver of the own vehicle frequently uses the warning sound for the other vehicle in front, or the driver of the own vehicle passes the other vehicle in front. It is to make heavy use of blinking lights.
- the driving situation determination unit 2 determines whether or not the own vehicle and the other vehicle are in the same lane based on the information of the lane in which the own vehicle and the other vehicle are traveling acquired from the vehicle sensor 8. .. Further, the driving status determination unit 2 determines whether or not the warning sound or the blinking of the lighting is frequently used based on the usage status of the warning sound or the lighting acquired from the vehicle body device 20.
- the driving situation determination unit 2 determines that the driver of the own vehicle is making a "warning sound or lighting outburst", it is based on what kind of "warning sound or lighting outburst" is being made. Determine whether you are driving in a horn or in a hurry.
- the driving situation determination unit 2 determines that the driver of the own vehicle is performing the driving when the driver of the own vehicle repeatedly executes the "warning sound or the outburst of lighting" more than a predetermined number of times. .. For example, the driving situation determination unit 2 determines that the driver is driving in a hurry when the warning sound is repeatedly emitted to the same other vehicle four times or more. Further, the driving situation determination unit 2 determines that the driving is being performed when the warning sound for 4 seconds or longer is repeatedly emitted for a predetermined number of times or more.
- the driving situation determination unit 2 states that the driver of the own vehicle is temporarily or continuously irritating when the driver of the own vehicle is temporarily or continuously executing the "warning sound or outburst of lighting". to decide. For example, the driving situation determination unit 2 determines that the driver is temporarily irritated when the warning sound is emitted for 1 to 2 seconds. Further, the driving situation determination unit 2 determines that the driver is continuously irritated when the warning sound is emitted for 2 to 4 seconds. Further, the driving condition determination unit 2 determines that the driver is continuously irritated when the warning sound is emitted two or three times.
- the support control unit 3 controls the display output control unit 6 and the voice output control unit 7 so as to provide driving support corresponding to each of the fanning operation, the temporary irritation operation, and the continuous irritation operation.
- the support control unit 3 displays a display output control unit so as to display a strong display message. Instruct 6. At this time, the support control unit 3 does not instruct the voice output control unit 7.
- the display output control unit 6 controls the display 9 so as to display a strong display message as support information for the driver.
- the display 9 displays a display message such as "Warning: It is determined that the horn has been honked multiple times. Please stop honking excessively.”
- the support control unit 3 instructs the display output control unit 6 to display a weak display message. Instruct the voice output control unit 7 to output the support information by voice.
- the display output control unit 6 controls the display 9 so as to display a weak display message as support information for the driver.
- the display 9 displays a display message such as "Caution: It is determined that the horn has been sounded multiple times. Please use an appropriate warning sound.”
- the voice output control unit 7 controls the speaker 10 so as to output the support information having the same content as the display message by voice. Support information having the same content as the display message is output by voice from the speaker 10.
- FIG. 20 is a flowchart showing an example of the operation of the driving support device 19. Since steps S33 to S38 in FIG. 20 correspond to steps S23 to S28 in FIG. 16, description thereof will be omitted here. Hereinafter, steps S31 and S32 will be described.
- step S31 the driving condition determination unit 2 determines the driving condition including the fanned driving and the irritated driving based on the information acquired from the vehicle sensor 8 and the vehicle body device 20.
- step S32 the driving situation determination unit 2 determines whether or not the driving situation is a driving or annoying driving. In the case of a fanning operation or an irritating operation, the process proceeds to step S33. On the other hand, if it is not a fanning operation or an irritating operation, the process proceeds to step S38.
- FIG. 21 is a block diagram showing an example of the configuration of the driving support device 21 according to the modified example.
- the driving support device 21 is characterized in that the output control unit 5 has a video recording control unit 12.
- Other configurations and operations are the same as those of the driving support device 14 shown in FIG. 10, and thus description thereof will be omitted here.
- the video recording control unit 12 controls the drive recorder 13 so as to record an image of the driving condition when the driving condition determination unit 2 determines that the driving is a fanning operation or an irritated driving according to an instruction from the support control unit 3.
- the drive recorder 13 records an image of the driving situation of the own vehicle according to an instruction from the image recording control unit 12.
- the support control unit 3 instructs the display output control unit 6 as described above, and the own vehicle performs the driving operation.
- the video recording control unit 12 is instructed to record the video of the driving situation at that time.
- the processing is the same as the processing of the video recording control unit 12 of FIG.
- the support control unit 3 has the display output control unit 6 and the voice output as described above.
- the control unit 7 is instructed, and the video recording control unit 12 is instructed to record an image of the driving situation when the own vehicle performs a temporary or continuous irritated operation.
- the process is the same as that of the video recording control unit 12 of FIG.
- the driving situation determination unit 2 determines whether or not the own vehicle has been driven or irritated based on the information acquired from the vehicle body device 20, and is irritated. In the case of road rage, determine whether it is temporary or continuous. Further, the support control unit 3 controls the output control unit 5 so as to provide driving support according to each of the fanning operation, the temporary irritation operation, or the continuous irritation operation. This makes it possible to provide appropriate driving support to a driver who has performed a fanning operation, a temporary irritation operation, or a continuous irritation operation.
- FIG. 22 is a block diagram showing an example of the configuration of the driving support device 22 according to the fourth embodiment.
- the output control unit 5 has only the video recording control unit 12, and is characterized in that the driving status determination unit 2 determines the driving status.
- the driving status determination unit 2 is connected to the vehicle sensor 8 and the peripheral detection device 23.
- the vehicle sensor 8 is the same as the vehicle sensor 8 described in the first to third embodiments.
- the peripheral detection device 23 includes a microphone that collects a warning sound emitted by another vehicle to the own vehicle, an illuminance sensor that detects light irradiation such as passing performed by the other vehicle to the own vehicle, and the like. That is, the peripheral detection device 23 detects the actions of other vehicles with respect to the own vehicle.
- the driving status determination unit 2 determines the driving status including the fanned driving and the irritated driving based on the information acquired from the vehicle sensor 8 and the peripheral detection device 23. Specifically, the driving situation determination unit 2 determines whether or not another vehicle exists in the vicinity of the own vehicle based on the information acquired from the vehicle sensor 8. Further, the driving situation determination unit 2 determines whether or not the other vehicle has irradiated the own vehicle with light such as a warning sound or passing based on the information acquired from the peripheral detection device 23. Then, when the driving situation determination unit 2 determines that the other vehicle has irradiated the own vehicle with light such as a warning sound or passing, the driver of the own vehicle is driving or irritating the other vehicle. Judge that you have done.
- the driving situation determination unit 2 determines a driving or annoying driving based on the information acquired from the peripheral detection device 23, for example, "detection of the action of another vehicle" shown in FIG. 23 can be mentioned. Will be.
- the specific behavior shown in FIG. 23 is an example, and other driving may be a specific behavior.
- the "detection of the action of another vehicle" shown in FIG. 23 detects that another vehicle existing in the vicinity of the own vehicle emits a warning sound to the own vehicle, or passes the own vehicle, or the like. It is to detect that it is irradiated with the light of.
- the driving status determination unit 2 determines the usage status of the warning sound or lighting of another vehicle with respect to the own vehicle acquired from the peripheral detection device 23. Then, the driving situation determination unit 2 performs either a fanning driving or an irritated driving by the driver of the own vehicle based on how the other vehicle uses the warning sound or the lighting for the own vehicle. Judge if you are.
- the driving situation determination unit 2 repeatedly executes light irradiation such as a warning sound or passing to the own vehicle by another vehicle existing in the vicinity of the own vehicle more than a predetermined number of times. In this case, it is determined that the driver of the own vehicle is driving in a horn. Further, the driving situation determination unit 2 is a driver of the own vehicle when another vehicle existing in the vicinity of the own vehicle temporarily irradiates the own vehicle with light such as a warning sound or passing. Judges that he is driving annoyed.
- the support control unit 3 controls the video recording control unit 12 so as to provide driving support corresponding to each of the fanning operation and the irritating operation.
- the support control unit 3 is the self before receiving an action from another vehicle.
- the video recording control unit 12 is instructed to record a video of the driving situation of the vehicle.
- the processing is the same as the processing of the video recording control unit 12 of FIG.
- the support control unit 3 records the image of the driving condition of the own vehicle before receiving the action from another vehicle. Instruct the video recording control unit 12.
- the processing is the same as the processing of the video recording control unit 12 of FIG. In this case, when the own vehicle is stopped, the driver is inquired whether or not to check the image recorded on the drive recorder 13.
- FIG. 24 is a flowchart showing an example of the operation of the driving support device 22.
- step S41 the driving condition determination unit 2 determines the driving condition including the fanning operation and the irritated operation based on the information acquired from the vehicle sensor 8 and the peripheral detection device 23.
- the driving situation determined here is the driving situation of the own vehicle.
- step S42 the driving condition determination unit 2 determines whether or not the driving condition of the own vehicle is a fanned driving or an irritated driving. In the case of a fanning operation or an irritating operation, the process proceeds to step S43. On the other hand, if it is not a fanning operation or an irritating operation, the process proceeds to step S46.
- step S43 the driving situation determination unit 2 determines whether or not the driving is a fanning operation. In the case of the fanning operation, the process proceeds to step S44. On the other hand, if it is not a fanning operation, the process proceeds to step S45.
- step S44 the support control unit 3 provides driving support according to the fanning operation.
- the support control unit 3 records a video of the driving situation of the own vehicle before receiving an action from another vehicle.
- the video recording control unit 12 is instructed to do so.
- the video recording control unit 12 records a video of the driving situation of the own vehicle before receiving an act from another vehicle.
- the drive recorder 13 records an image of the driving situation of the own vehicle before receiving an act from another vehicle.
- step S45 the support control unit 3 provides driving support according to the frustrated driving.
- the support control unit 3 displays an image of the driving status of the own vehicle before receiving an action from another vehicle. Instruct the video recording control unit 12 to record.
- the video recording control unit 12 records a video of the driving situation of the own vehicle before receiving an act from another vehicle.
- the drive recorder 13 records an image of the driving situation of the own vehicle before receiving an act from another vehicle. Further, when the own vehicle is stopped, the driver is inquired whether or not to check the image recorded on the drive recorder 13.
- step S46 the support control unit 3 does not provide driving support. That is, the support control unit 3 does not instruct the video recording control unit 12.
- the driving situation determination unit 2 determines whether or not the own vehicle has been driven or irritated based on the information acquired from the peripheral detection device 23. Further, the support control unit 3 controls the output control unit 5 so as to provide driving support according to each of the driving operation and the irritating operation. This makes it possible to provide appropriate driving support to the driver who has performed a fanning operation or an irritated operation.
- FIG. 25 is a block diagram showing an example of the configuration of the driving support device 24 according to the fifth embodiment. Since each component and operation of the driving support device 24 is a configuration and operation in which the driving support devices described in each of the first to fourth embodiments are combined, the description thereof will be omitted here.
- Each function of the operation status determination unit 2, the support control unit 3, the display output control unit 6, and the voice output control unit 7 in the operation support device 4 described in the first embodiment is realized by the processing circuit. That is, the driving support device 4 determines the driving situation of the driver of the own vehicle, controls the driving support according to the driving in a hurry or the frustrated driving, controls the display of the support information, and outputs the support information by voice.
- a processing circuit for performing control is provided.
- the processing circuit may be dedicated hardware, and may be a processor (CPU, central processing unit, processing unit, arithmetic unit, microprocessor, microprocessor, DSP (Digital Signal Processor)) that executes a program stored in the memory. It may be).
- the processing circuit 25 may be, for example, a single circuit, a composite circuit, a programmed processor, a parallel programmed processor, or an ASIC (Application Specific Integrated Circuit). , FPGA (Field Programmable Gate Array), or a combination of these.
- the functions of the operation status determination unit 2, the support control unit 3, the display output control unit 6, and the audio output control unit 7 may be realized by the processing circuit 25, respectively, and the functions may be collectively realized by one processing circuit 25. You may.
- the functions of the operation status determination unit 2, the support control unit 3, the display output control unit 6, and the audio output control unit 7 are software, firmware, or software and firmware. It is realized by the combination with.
- the software or firmware is written as a program and stored in the memory 27.
- the processor 26 realizes each function by reading and executing the program recorded in the memory 27. That is, the driving support device 4 performs a step of determining the driving situation of the driver of the own vehicle, a step of controlling driving support according to a fanning driving or an irritated driving, a step of controlling to display support information, and support information.
- a memory 27 for storing a program for which a step for controlling audio output is to be executed as a result is provided.
- the memory is, for example, non-volatile or volatile such as RAM (RandomAccessMemory), ROM (ReadOnlyMemory), flash memory, EPROM (ErasableProgrammableReadOnlyMemory), and EEPROM (ElectricallyErasableProgrammableReadOnlyMemory). It may be a sex semiconductor memory, a magnetic disk, a flexible disk, an optical disk, a compact disk, a DVD (DigitalVersatileDisc), or any storage medium that will be used in the future.
- the support control unit 3, the display output control unit 6, and the audio output control unit 7 are realized by dedicated hardware, and other functions are provided by software or firmware. It may be realized by.
- the processing circuit can realize each of the above-mentioned functions by hardware, software, firmware, or a combination thereof.
- the driving support device 11 the driving support device 14, the driving support device 18, and the driving support device 18 described in each of the first to fifth embodiments have been described above. The same applies to the hardware configurations of the driving support device 19, the driving support device 21, and the driving support device 24.
- the driving support device described above is a system in which not only an in-vehicle navigation device, that is, a car navigation device, but also a PND (Portable Navigation Device) that can be mounted on a vehicle, a server provided outside the vehicle, and the like are appropriately combined. It can also be applied to a navigation device constructed as a system or a device other than the navigation device constructed as a system. In this case, each function or each component of the driving support device is distributed and arranged in each function for constructing the system.
- PND Portable Navigation Device
- the function of the driving support device can be arranged on the server.
- the vehicle includes a vehicle sensor 8, a display 9, and a speaker 10.
- the server 28 includes an operation status determination unit 2, a support control unit 3, a display output control unit 6, and a voice output control unit 7. With such a configuration, a driving support system can be constructed.
- software that executes the operation in the above embodiment may be incorporated into, for example, a server.
- the driving support method realized by the server executing this software is the driving that the driver of the own vehicle intentionally performs with respect to the other vehicle and the driving of the other vehicle that is not the intention of the driver of the own vehicle. Judging the driving situation including irritated driving that irritates the person, and performing control to support the driver's driving of the own vehicle according to each of the case where it is determined to be irritated driving and the case where it is determined to be irritated driving. including.
- each embodiment can be freely combined, and each embodiment can be appropriately modified or omitted.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Traffic Control Systems (AREA)
Abstract
本開示は、煽り運転または苛立たせ運転を行った運転者に対して適切な運転支援を行うことが可能な運転支援装置および運転支援方法を提供することを目的とする。本開示による運転支援装置は、自車両の運転者が他車両に対して意図的に行う煽り運転と、自車両の運転者の意図ではないが他車両の運転者を苛立たせる苛立たせ運転とを含む運転状況を判断する運転状況判断部と、運転状況判断部が煽り運転と判断した場合と苛立たせ運転と判断した場合とのそれぞれに応じて自車両の運転者の運転を支援する制御を行う支援制御部とを備える。
Description
本開示は、危険運転を行った運転者に対して適切な運転支援を行う運転支援装置および運転支援方法に関する。
従来、自車両の運転者による煽り運転のような危険運転を検出し、当該危険運転を検出すると運転者に報知する技術が開示されている(例えば、特許文献1参照)。
特許文献1では、自車両と当該自車両の前方を走行している他車両との車間距離情報(第1情報)と、自車両の走行レーンを区画する左右の線と自車両との左右方向の相対的な位置関係を示す情報(第2情報)とを取得し、第1情報に基づいて車間距離が短いと判断され、かつ第2情報および統計値に基づいて異常(通常ではない)と判断されたときに「危険運転」とみなして警報等で通知する。
危険運転には、自車両の運転者が他車両に対して意図的に行う煽り運転と、自車両の運転者の意図ではないが他車両の運転者を苛立たせる苛立たせ運転とがあると考えられる。例えば、煽り運転を行っている運転者に対して警告音を発すると、当該運転者を逆撫でてしまい、より過剰な危険運転を行う可能性がある。一方、苛立たせ運転を行っている運転者に対して警告音を発すると、当該運転者は自身の運転状況に気が付いて運転を改める可能性がある。従って、自車両の運転者に対して、煽り運転と苛立たせ運転とのそれぞれに応じた運転支援を行うことが有効であると考えられる。
特許文献1では、煽り運転と苛立たせ運転とを区別せず一律に通知しているため、上記の問題が生じる可能性がある。従って、特許文献1では、煽り運転または苛立たせ運転を行った運転者に対して適切な運転支援を行っているとはいえなかった。
本開示は、このような問題を解決するためになされたものであり、煽り運転または苛立たせ運転を行った運転者に対して適切な運転支援を行うことが可能な運転支援装置および運転支援方法を提供することを目的とする。
上記の課題を解決するために、本開示による運転支援装置は、自車両の運転者が他車両に対して意図的に行う煽り運転と、自車両の運転者の意図ではないが他車両の運転者を苛立たせる苛立たせ運転とを含む運転状況を判断する運転状況判断部と、運転状況判断部が煽り運転と判断した場合と苛立たせ運転と判断した場合とのそれぞれに応じて自車両の運転者の運転を支援する制御を行う支援制御部とを備える。
本開示によると、運転支援装置は、運転状況判断部が煽り運転と判断した場合と苛立たせ運転と判断した場合とのそれぞれに応じて自車両の運転者の運転を支援する制御を行うため、煽り運転または苛立たせ運転を行った運転者に対して適切な運転支援を行うことが可能となる。
本開示の目的、特徴、態様、および利点は、以下の詳細な説明と添付図面とによって、より明白となる。
<実施の形態1>
<1-1.構成>
図1は、実施の形態1による運転支援装置1の構成の一例を示すブロック図である。なお、図1では、実施の形態1による運転支援装置を構成する必要最小限の構成を示している。運転支援装置1は、車両(以下、「自車両」という)内に搭載されているものとする。
<1-1.構成>
図1は、実施の形態1による運転支援装置1の構成の一例を示すブロック図である。なお、図1では、実施の形態1による運転支援装置を構成する必要最小限の構成を示している。運転支援装置1は、車両(以下、「自車両」という)内に搭載されているものとする。
図1に示すように、運転支援装置1は、運転状況判断部2と支援制御部3とを備えている。
運転状況判断部2は、自車両の運転者が他車両に対して意図的に行う煽り運転と、自車両の運転者の意図ではないが他車両の運転者を苛立たせる苛立たせ運転とを含む運転状況を判断する。支援制御部3は、運転状況判断部2が煽り運転と判断した場合と苛立たせ運転と判断した場合とのそれぞれに応じて、自車両の運転者の運転を支援する制御を行う。
次に、図1に示す運転支援装置1を含む他の構成について説明する。
図2は、他の構成に係る運転支援装置4の構成の一例を示すブロック図である。
図2に示すように、運転支援装置4は、運転状況判断部2と、支援制御部3と、出力制御部5とを備えている。出力制御部5は、表示出力制御部6および音声出力制御部7を含む。また、運転状況判断部2は車両センサ8に接続され、表示出力制御部6はディスプレイ9に接続され、音声出力制御部7はスピーカ10に接続されている。
車両センサ8は、自車両に対する他車両の相対位置と、自車両および他車両が走行中の車線とを含む自車両周辺の状況を検出する。また、車両センサ8は、他車両の相対位置の時系列変化に基づいて、当該他車両の相対速度を求めてもよい。
車両センサ8は、例えばカメラであってもよい。車両センサ8がカメラである場合、自車両の周辺を撮影した画像を画像処理することによって、自車両に対する他車両の相対位置と、自車両および他車両が走行中の車線とを検出することができる。
運転状況判断部2は、車両センサ8から取得した情報に基づいて、煽り運転および苛立たせ運転を含む運転状況を判断する。具体的には、運転状況判断部2は、自車両が同一の他車両に対して特定行動を予め定められた回数以上実行している場合、自車両の運転者が煽り運転を行っていると判断する。また、運転状況判断部2は、自車両が同一の他車両に対して特定行動を一時的に実行している場合、自車両の運転者が苛立たせ運転を行っていると判断する。
運転状況判断部2が煽り運転および苛立たせ運転を判断する際に参照する特定行動としては、例えば図3~7に示す各特定行動が挙げられる。すなわち、特定行動としては、例えば、「追越車線を占有する運転」、「幅寄せ」、「割り込み」、「前方車両への接近」、「前方車両へのふらつき運転」、「後方車両への急ブレーキ」、および「後方車両へのふらつき運転」が挙げられる。なお、図3~7に示す各特定行動は例示であり、その他の運転を特定行動としてもよい。例えば、自車両および他車両が追越不可の道路に存在し、かつ自車両が他車両の前方に存在する状況における運転を特定行動としてもよい。
以下、図3~7に示す各特定行動について説明する。
図3に示す「追越車線を占有する運転」は、自車両および他車両が追越車線に存在し、かつ自車両が他車両の前方に存在する状況において、自車両の運転者が当該自車両を追い越そうとしている他車両の走行を妨げる運転を行うことである。この場合、運転状況判断部2は、車両センサ8から取得した自車両および他車両が走行中の車線の情報に基づいて、自車両および他車両がともに追越車線に存在しているか否かを判断する。また、運転状況判断部2は、車両センサ8から取得した自車両に対する他車両の相対位置の情報に基づいて、自車両が他車両の前方に存在しているか否かを判断する。
そして、運転状況判断部2は、自車両の運転者が「追越車線を占有する運転」を行っていると判断すると、どのような「追越車線を占有する運転」を行っているのかに基づいて、煽り運転または苛立たせ運転のいずれを行っているのかを判断する。具体的には、運転状況判断部2は、自車両の運転者が「追越車線を占有する運転」を予め定められた回数以上繰り返して実行している場合に煽り運転を行っていると判断する。また、運転状況判断部2は、自車両の運転者が「追越車線を占有する運転」を一時的に実行している場合に苛立たせ運転を行っていると判断する。
図4に示す「幅寄せ」は、自車両が隣の車線を走行している他車両に対して幅寄せをする運転を行うことである。具体的には、自車両および他車両が互いに隣接する車線に存在し、かつ自車両および他車両が並走している状況において、自車両の運転者が当該自車両を他車両に接近させる運転を行うことである。このような自車両の走行は、自車両が予め定められて距離以下まで他車両に接近する走行であり、他車両が自車両に対する回避行動を起こさせる走行である。この場合、運転状況判断部2は、車両センサ8から取得した自車両および他車両が走行中の車線の情報に基づいて、自車両および他車両が互いに隣接する車線に存在しているか否かを判断する。また、運転状況判断部2は、車両センサ8から取得した自車両に対する他車両の相対位置の情報に基づいて、自車両および他車両が並走しているか否かを判断する。
そして、運転状況判断部2は、自車両の運転者が「幅寄せ」を行っていると判断すると、どのような「幅寄せ」を行っているのかに基づいて、煽り運転または苛立たせ運転のいずれを行っているのかを判断する。具体的には、運転状況判断部2は、自車両の運転者が「幅寄せ」を予め定められた回数以上繰り返して実行している場合に煽り運転を行っていると判断する。また、運転状況判断部2は、自車両の運転者が「幅寄せ」を一時的に実行している場合に苛立たせ運転を行っていると判断する。
図5に示す「割り込み」は、他車両の前方に自車両が急に侵入して割り込みをする運転を行うことである。具体的には、自車両および他車両が異なる車線を走行している状況において、自車両の運転者が当該自車両を他車両の前方に急に割り込む運転を行うことである。このような自車両の走行は、自車両が予め定められた距離以下まで他車両に接近する走行であり、他車両が自車両に対する回避行動を起こさせる走行である。この場合、運転状況判断部2は、車両センサ8から取得した自車両および他車両が走行中の車線の情報に基づいて、自車両および他車両が異なる車線に存在しているか否かを判断する。また、運転状況判断部2は、車両センサ8から取得した自車両に対する他車両の相対位置の情報に基づいて、自車両が他車両の前方に急に割り込んだか否かを判断する。
そして、運転状況判断部2は、自車両の運転者が「割り込み」を行っていると判断すると、どのような「割り込み」を行っているのかに基づいて、煽り運転または苛立たせ運転のいずれを行っているのかを判断する。具体的には、運転状況判断部2は、自車両の運転者が「割り込み」を予め定められた回数以上繰り返して実行している場合に煽り運転を行っていると判断する。また、運転状況判断部2は、自車両の運転者が「割り込み」を一時的に実行している場合に苛立たせ運転を行っていると判断する。
図6に示す「前方車両への接近」は、同じ車線を先行する他車両に対して自車両が予め定められた距離以内に接近する運転を行うことである。また、「前方車両へのふらつき運転」は、同じ車線を先行する他車両に対して自車両が予め定められた距離以内にふらつきながら接近する運転を行うことである。このような自車両の走行は、自車両が予め定められた距離以下まで他車両に接近する走行であり、他車両が自車両に対する回避行動を起こさせる走行である。この場合、運転状況判断部2は、車両センサ8から取得した自車両および他車両が走行中の車線の情報に基づいて、自車両および他車両が同じ車線に存在しているか否かを判断する。また、運転状況判断部2は、車両センサ8から取得した自車両に対する他車両の相対位置の情報に基づいて、先行する他車両に対して自車両が予め定められた距離以内に接近したか否かを判断する。
そして、運転状況判断部2は、自車両の運転者が「前方車両への接近」または「前方車両へのふらつき運転」を行っていると判断すると、どのような「前方車両への接近」または「前方車両へのふらつき運転」を行っているのかに基づいて、煽り運転または苛立たせ運転のいずれを行っているのかを判断する。具体的には、運転状況判断部2は、自車両の運転者が「前方車両への接近」または「前方車両へのふらつき運転」を予め定められた回数以上繰り返して実行している場合に煽り運転を行っていると判断する。また、運転状況判断部2は、自車両の運転者が「前方車両への接近」または「前方車両へのふらつき運転」を一時的に実行している場合に苛立たせ運転を行っていると判断する。
図7に示す「後方車両への急ブレーキ」は、自車両および他車両が同じ車線を走行している状況において、自車両が他車両の前方で急ブレーキをかける運転を行うことである。また、「後方車両へのふらつき運転」は、自車両および他車両が同じ車線を走行している状況において、後方の他車両に対して自車両が予め定められた距離以内にふらつきながら接近する運転を行うことである。このような自車両の走行は、自車両が予め定められた距離以下まで他車両に接近する走行であり、他車両が自車両に対する回避行動を起こさせる走行である。この場合、運転状況判断部2は、車両センサ8から取得した自車両および他車両が走行中の車線の情報に基づいて、自車両および他車両が同じ車線に存在しているか否かを判断する。また、運転状況判断部2は、車両センサ8から取得した自車両に対する他車両の相対位置の情報に基づいて、自車両が他車両の前方で急ブレーキをかけたか否かを判断する。
そして、運転状況判断部2は、自車両の運転者が「後方車両への急ブレーキ」または「後方車両へのふらつき運転」を行っていると判断すると、どのような「後方車両への急ブレーキ」または「後方車両へのふらつき運転」を行っているのかに基づいて、煽り運転または苛立たせ運転のいずれを行っているのかを判断する。具体的には、運転状況判断部2は、自車両の運転者が「後方車両への急ブレーキ」または「後方車両へのふらつき運転」を予め定められた回数以上繰り返して実行している場合に煽り運転を行っていると判断する。また、運転状況判断部2は、自車両の運転者が「後方車両への急ブレーキ」または「後方車両へのふらつき運転」を一時的に実行している場合に苛立たせ運転を行っていると判断する。
図2の説明に戻り、支援制御部3は、運転状況判断部2が煽り運転と判断した場合と苛立たせ運転と判断した場合とのそれぞれに応じて、自車両の運転者の運転を支援する制御を行う。具体的には、支援制御部3は、表示出力制御部6および音声出力制御部7のうちの少なくとも一方に対して、自車両の運転者の運転を支援する制御を行う。
出力制御部5は、表示出力制御部6および音声出力制御部7を有している。表示出力制御部6は、支援制御部3からの指示に従って運転者に対して運転を支援する支援情報を表示するようにディスプレイ9を制御する。音声出力制御部7は、支援制御部3からの指示に従って運転者に対して支援情報を音声で出力するようにスピーカ10を制御する。
以下、図3~7に示す各特定行動における運転支援の一例について説明する。なお、図3~7において、表示メッセージの「強」は、運転者に対するメッセージが警告する内容であることを示し、表示メッセージの「弱」は、運転者に対するメッセージが注意する内容であることを示している。
図3に示すように、自車両の運転者が行っている「追越車線を占有する運転」が煽り運転である場合、支援制御部3は、強い表示メッセージを表示するよう表示出力制御部6に指示する。このとき、支援制御部3は、音声出力制御部7に指示しない。表示出力制御部6は、運転者に対する支援情報として強い表示メッセージを表示するようにディスプレイ9を制御する。ディスプレイ9には、例えば、「警告:追越車線を占有する運転と判断されました。空きスペースに一時停止してください。」などの表示メッセージが表示される。
自車両の運転者が行っている「追越車線を占有する運転」が一時的な苛立たせ運転である場合、支援制御部3は、弱い表示メッセージを表示するよう表示出力制御部6に指示し、支援情報を音声出力するように音声出力制御部7に指示する。表示出力制御部6は、運転者に対する支援情報として弱い表示メッセージを表示するようにディスプレイ9を制御する。ディスプレイ9には、例えば、「注意:追越車線を占有する運転と判断されました。できるだけ走行車線を走行しましょう。」などの表示メッセージが表示される。また、音声出力制御部7は、表示メッセージと同じ内容の支援情報を音声出力するようにスピーカ10を制御する。スピーカ10からは、表示メッセージと同じ内容の支援情報を音声出力される。
図4に示すように、自車両の運転者が行っている「幅寄せ」が煽り運転である場合、支援制御部3は、強い表示メッセージを表示するよう表示出力制御部6に指示する。このとき、支援制御部3は、音声出力制御部7に指示しない。表示出力制御部6は、運転者に対する支援情報として強い表示メッセージを表示するようにディスプレイ9を制御する。ディスプレイ9には、例えば、「警告:幅寄せしていると判断されました。すぐに隣の車両との車間距離を空けてください。」などの表示メッセージが表示される。
自車両の運転者が行っている「幅寄せ」が一時的な苛立たせ運転である場合、支援制御部3は、弱い表示メッセージを表示するよう表示出力制御部6に指示し、支援情報を音声出力するように音声出力制御部7に指示する。表示出力制御部6は、運転者に対する支援情報として弱い表示メッセージを表示するようにディスプレイ9を制御する。ディスプレイ9には、例えば、「注意:幅寄せしていると判断されました。隣の車両との車間距離を空けましょう。」などの表示メッセージが表示される。また、音声出力制御部7は、表示メッセージと同じ内容の支援情報を音声出力するようにスピーカ10を制御する。スピーカ10からは、表示メッセージと同じ内容の支援情報を音声出力される。
図5に示すように、自車両の運転者が行っている「割り込み」が煽り運転である場合、支援制御部3は、強い表示メッセージを表示するよう表示出力制御部6に指示する。このとき、支援制御部3は、音声出力制御部7に指示しない。表示出力制御部6は、運転者に対する支援情報として強い表示メッセージを表示するようにディスプレイ9を制御する。ディスプレイ9には、例えば、「警告:割り込みしたと判断されました。急な割り込みは止めてください。」などの表示メッセージが表示される。
自車両の運転者が行っている「割り込み」が一時的な苛立たせ運転である場合、支援制御部3は、弱い表示メッセージを表示するよう表示出力制御部6に指示し、支援情報を音声出力するように音声出力制御部7に指示する。表示出力制御部6は、運転者に対する支援情報として弱い表示メッセージを表示するようにディスプレイ9を制御する。ディスプレイ9には、例えば、「注意:割り込みしたと判断されました。急な割り込みは避けてください。」などの表示メッセージが表示される。また、音声出力制御部7は、表示メッセージと同じ内容の支援情報を音声出力するようにスピーカ10を制御する。スピーカ10からは、表示メッセージと同じ内容の支援情報を音声出力される。
図6に示すように、自車両の運転者が行っている「前方車両への接近」または「前方車両へのふらつき運転」が煽り運転である場合、支援制御部3は、強い表示メッセージを表示するよう表示出力制御部6に指示する。このとき、支援制御部3は、音声出力制御部7に指示しない。表示出力制御部6は、運転者に対する支援情報として強い表示メッセージを表示するようにディスプレイ9を制御する。ディスプレイ9には、例えば、「警告:前方車両に接近していると判断されました。前方車両との車間距離を空けてください。」などの表示メッセージが表示される。
自車両の運転者が行っている「前方車両への接近」または「前方車両へのふらつき運転」が一時的な苛立たせ運転である場合、支援制御部3は、弱い表示メッセージを表示するよう表示出力制御部6に指示し、支援情報を音声出力するように音声出力制御部7に指示する。表示出力制御部6は、運転者に対する支援情報として弱い表示メッセージを表示するようにディスプレイ9を制御する。ディスプレイ9には、例えば、「注意:前方車両に接近していると判断されました。前方車両との車間距離を空けましょう。」などの表示メッセージが表示される。また、音声出力制御部7は、表示メッセージと同じ内容の支援情報を音声出力するようにスピーカ10を制御する。スピーカ10からは、表示メッセージと同じ内容の支援情報を音声出力される。
図7に示すように、自車両の運転者が行っている「後方車両への急ブレーキ」または「後方車両へのふらつき運転」が煽り運転である場合、支援制御部3は、強い表示メッセージを表示するよう表示出力制御部6に指示する。このとき、支援制御部3は、音声出力制御部7に指示しない。表示出力制御部6は、運転者に対する支援情報として強い表示メッセージを表示するようにディスプレイ9を制御する。ディスプレイ9には、例えば、「警告:後方車両に接近していると判断されました。後方車両との車間距離を空けてください。」などの表示メッセージが表示される。
自車両の運転者が行っている「後方車両への急ブレーキ」または「後方車両へのふらつき運転」が一時的な苛立たせ運転である場合、支援制御部3は、弱い表示メッセージを表示するよう表示出力制御部6に指示し、支援情報を音声出力するように音声出力制御部7に指示する。表示出力制御部6は、運転者に対する支援情報として弱い表示メッセージを表示するようにディスプレイ9を制御する。ディスプレイ9には、例えば、「注意:後方車両に接近していると判断されました。後方車両との車間距離を空けましょう。」などの表示メッセージが表示される。また、音声出力制御部7は、表示メッセージと同じ内容の支援情報を音声出力するようにスピーカ10を制御する。スピーカ10からは、表示メッセージと同じ内容の支援情報を音声出力される。
<1-2.動作>
図8は、運転支援装置4の動作の一例を示すフローチャートである。
図8は、運転支援装置4の動作の一例を示すフローチャートである。
ステップS11において、運転状況判断部2は、車両センサ8から取得した情報に基づいて、煽り運転および苛立たせ運転を含む運転状況を判断する。
ステップS12において、運転状況判断部2は、運転状況が煽り運転または苛立たせ運転であるか否かを判断する。煽り運転または苛立たせ運転である場合は、ステップS13に移行する。一方、煽り運転または苛立たせ運転でない場合は、ステップS16に移行する。
ステップS13において、運転状況判断部2は、煽り運転であるか否かを判断する。煽り運転である場合は、ステップS14に移行する。一方、煽り運転でない場合は、ステップS15に移行する。
ステップS14において、支援制御部3は、煽り運転に応じた運転支援を行う。例えば、運転状況判断部2が図3~7に示す特定行動を煽り運転と判断した場合、支援制御部3は、強い表示メッセージを表示するように表示出力制御部6に指示し、音声出力制御部7には指示しない。表示出力制御部6は、強い表示メッセージを表示するようにディスプレイ9を制御する。これにより、ディスプレイ9には強い表示メッセージが表示される。
ステップS15において、支援制御部3は、苛立たせ運転に応じた運転支援を行う。例えば、運転状況判断部2が図3~7に示す特定行動を苛立たせ運転と判断した場合、支援制御部3は、弱い表示メッセージを表示するよう表示出力制御部6に指示し、支援情報を音声出力するように音声出力制御部7に指示する。表示出力制御部6は、弱い表示メッセージを表示するようにディスプレイ9を制御する。また、音声出力制御部7は、表示メッセージと同じ内容の支援情報を音声出力するようにスピーカ10を制御する。これにより、ディスプレイ9には弱い表示メッセージが表示され、スピーカ10からは表示メッセージと同じ内容の支援情報を音声出力される。
ステップS16において、支援制御部3は、運転支援を行わない。すなわち、支援制御部3は、表示出力制御部6および音声出力制御部7に指示しない。
<1-3.変形例>
図9は、変形例による運転支援装置11の構成の一例を示すブロック図である。図9に示すように、運転支援装置11は、出力制御部5が映像記録制御部12を有することを特徴としている。映像記録制御部12は、ドライブレコーダ13に接続されている。その他の構成および動作は、図2に示す運転支援装置4と同様であるため、ここでは詳細な説明を省略する。
図9は、変形例による運転支援装置11の構成の一例を示すブロック図である。図9に示すように、運転支援装置11は、出力制御部5が映像記録制御部12を有することを特徴としている。映像記録制御部12は、ドライブレコーダ13に接続されている。その他の構成および動作は、図2に示す運転支援装置4と同様であるため、ここでは詳細な説明を省略する。
映像記録制御部12は、支援制御部3からの指示に従って、運転状況判断部2が煽り運転または苛立たせ運転と判断したときの運転状況の映像を記録するようドライブレコーダ13を制御する。また、映像記録制御部12は、運転状況判断部2が煽り運転または苛立たせ運転と判断したときの運転状況の映像を外部のサーバ(図示しない)に記録する制御を行ってもよい。
ドライブレコーダ13は、映像記録制御部12からの指示に従って、自車両の運転状況の映像を記録する。自車両の運転状況の映像は、車両センサ8に含まれるカメラが撮影してもよく、ドライブレコーダ13が有するカメラ(図示せず)が撮影してもよい。
例えば、運転状況判断部2が図3~7に示す特定行動を煽り運転と判断した場合、支援制御部3は、上述で説明した通り表示出力制御部6に指示し、自車両が煽り運転を行ったときの運転状況の映像を記録するよう映像記録制御部12に指示する。映像記録制御部12は、自車両が煽り運転を行ったときの運転状況の映像を記録するようにドライブレコーダ13を制御する。これにより、ドライブレコーダ13には自車両が煽り運転を行ったときの運転状況の映像が記録される。このような処理は、図8のステップS14で行われる。なお、図3~7において、ドライブレコーダの「記録のみ」は、ドライブレコーダ13に映像を記録するのみの処理を行う。
また、例えば、運転状況判断部2が図3~7に示す特定行動を苛立たせ運転と判断した場合、支援制御部3は、上述で説明した通り表示出力制御部6および音声出力制御部7に指示し、自車両が苛立たせ運転を行ったときの運転状況の映像を記録するよう映像記録制御部12に指示する。これにより、ドライブレコーダ13には自車両が苛立たせ運転を行ったときの運転状況の映像が記録される。このような処理は、図8のステップS15で行われる。
なお、図3~7において、ドライブレコーダの「記録・映像」は、ドライブレコーダ13に映像を記録する処理だけでなく、自車両が停車したときに運転者に対してドライブレコーダ13に記録した映像を確認するか否かを問い合わせる。この場合、例えば、「苛立たせ運転と判断されたときの運転状況の映像が記録されています。記録映像を確認しますか? Yes/No」などを表示してもよい。例えば、停車時に映像を確認する場合、運転者は、自車両内でドライブレコーダを操作することによって映像を確認することができる。また、降車後に映像を確認する場合、運転者は、ドライブレコーダに記録した映像をスマートフォンなどのタブレット機器を用いて映像を確認することができる。この場合、クラウドサーバに保管された映像をタブレット機器に送信してもよく、ドライブレコーダからタブレット機器に映像を送信してもよい。
<1-4.効果>
以上のことから、実施の形態1によれば、運転状況判断部2は自車両が煽り運転または苛立たせ運転を行ったか否かを判断し、支援制御部3は煽り運転または苛立たせ運転に応じた運転支援を行うよう出力制御部5を制御する。これにより、煽り運転または苛立たせ運転を行った運転者に対して適切な運転支援を行うことが可能となる。
以上のことから、実施の形態1によれば、運転状況判断部2は自車両が煽り運転または苛立たせ運転を行ったか否かを判断し、支援制御部3は煽り運転または苛立たせ運転に応じた運転支援を行うよう出力制御部5を制御する。これにより、煽り運転または苛立たせ運転を行った運転者に対して適切な運転支援を行うことが可能となる。
<実施の形態2>
<2-1.構成>
図10は、実施の形態2による運転支援装置14の構成の一例を示すブロック図である。図10に示すように、運転支援装置14は出力制御部5が走行出力制御部15を有することを特徴としている。走行出力制御部15は、GNSS(Global Navigation Satellite System)システム16および走行制御装置17に接続されている。また、運転状況判断部2は、自車両の運転者の運転が苛立たせ運転であると判断した場合に、当該苛立たせ運転が一時的であるのか継続的であるのかを判断する。その他の構成および動作は、図2に示す運転支援装置4と同様であるため、ここでは詳細な説明を省略する。
<2-1.構成>
図10は、実施の形態2による運転支援装置14の構成の一例を示すブロック図である。図10に示すように、運転支援装置14は出力制御部5が走行出力制御部15を有することを特徴としている。走行出力制御部15は、GNSS(Global Navigation Satellite System)システム16および走行制御装置17に接続されている。また、運転状況判断部2は、自車両の運転者の運転が苛立たせ運転であると判断した場合に、当該苛立たせ運転が一時的であるのか継続的であるのかを判断する。その他の構成および動作は、図2に示す運転支援装置4と同様であるため、ここでは詳細な説明を省略する。
GNSSシステム16は、例えば、地図データベース(図示せず)から地図情報を取得し、自車両の現在の位置情報を取得する。
走行出力制御部15は、支援制御部3からの指示に従って、GNSSシステム16から取得した情報を用いて、自車両の走行を自動制御するよう走行制御装置17を制御する。具体的には、走行出力制御部15は、GNSSシステム16から取得した地図情報および自車両の現在の位置情報に基づいて、自車両の走行を自動制御するよう走行制御装置17を制御する。走行制御装置17は、走行出力制御部15からの指示に従って、自車両の走行を自動制御する。
運転状況判断部2は、車両センサ8から取得した情報に基づいて、煽り運転および苛立たせ運転を含む運転状況を判断する。また、運転状況判断部2は、苛立たせ運転と判断した場合、当該苛立たせ運転が一時的であるのか継続的であるのかを判断する。なお、運転状況判断部2は、GNSSシステム16から取得した地図情報および自車両の現在の位置情報をさらに考慮して運転状況を判断してもよい。
支援制御部3は、煽り運転、一時的な苛立たせ運転、および継続的な苛立たせ運転のそれぞれに対応する運転支援を行うよう表示出力制御部6、音声出力制御部7、および走行出力制御部15を制御する。
以下、図11~15に示す各特定行動における運転支援の一例について説明する。なお、図11~15において、運転支援の項目の「車両走行制御」、および苛立たせ運転の「継続的」以外は図3~7と同様であるため、ここでは説明を省略する。
支援制御部3は、運転状況判断部2が継続的な苛立たせ運転であると判断した場合のみ、自車両の走行を自動制御するよう走行出力制御部15に指示する。走行出力制御部15は、GNSSシステム16から取得した情報を用いて、自車両の走行を自動制御するよう走行制御装置17を制御する。
図11の例では、走行制御装置17は、法定速度以下で走行するよう自車両の走行を自動制御する。このとき、ディスプレイ9に、自車両の走行先に空きスペースがあることを地図上に示してもよい。あるいは、走行制御装置17は、自車両の走行先に存在する空きスペースに自車両が自動的に移動するように制御してもよく、自動的に自車両が車線変更するように制御してもよい。
図12の例では、走行制御装置17は、隣の他車両との車間距離を一定の距離に保つように制御する。図13の例では、走行制御装置17は、減速して隣の車線に移動するように制御する。図14の例では、走行制御装置17は、前方車両との車間距離を一定に保つように制御する。図15の例では、走行制御装置17は、後方車両との車間距離を一定に保つように制御する。
また、支援制御部3は、一時的な苛立たせ運転および継続的な苛立たせ運転のそれぞれに応じて表示メッセージを異ならせるよう表示出力制御部6を制御する。表示出力制御部6は、一時的な苛立たせ運転の場合は弱い表示メッセージを表示し、継続的な苛立たせ運転の場合は強い表示メッセージを表示するようディスプレイ9を制御する。図11~15における弱い表示メッセージおよび強い表示メッセージのそれぞれの内容は、図3~7と同様である。
<2-2.動作>
図16は、運転支援装置14の動作の一例を示すフローチャートである。なお、図16のステップS21~ステップS24は図8のステップS11~ステップS14に対応し、図16のステップS28は図8のステップS16に対応しているため、ここでは説明を省略する。以下では、ステップS25~ステップS27について説明する。
図16は、運転支援装置14の動作の一例を示すフローチャートである。なお、図16のステップS21~ステップS24は図8のステップS11~ステップS14に対応し、図16のステップS28は図8のステップS16に対応しているため、ここでは説明を省略する。以下では、ステップS25~ステップS27について説明する。
ステップS25において、運転状況判断部2は、苛立たせ運転が一時的か否かを判断する。苛立たせ運転が一時的である場合は、ステップS26に移行する。一方、苛立たせ運転が一時的でない場合、すなわち苛立たせ運転が継続的である場合は、ステップS27に移行する。
ステップS26において、支援制御部3は、一時的な苛立たせ運転に応じた運転支援を行う。例えば、運転状況判断部2が図11~15に示す特定行動を一時的な苛立たせ運転と判断した場合、支援制御部3は、弱い表示メッセージを表示するよう表示出力制御部6に指示し、支援情報を音声出力するように音声出力制御部7に指示する。このとき、支援制御部3は、走行出力制御部15には指示しない。表示出力制御部6は、弱い表示メッセージを表示するようにディスプレイ9を制御する。また、音声出力制御部7は、表示メッセージと同じ内容の支援情報を音声出力するようにスピーカ10を制御する。これにより、ディスプレイ9には弱い表示メッセージが表示され、スピーカ10からは表示メッセージと同じ内容の支援情報を音声出力される。
ステップS27において、支援制御部3は、継続的な苛立たせ運転に応じた運転支援を行う。例えば、運転状況判断部2が図11~15に示す特定行動を継続的な苛立たせ運転と判断した場合、支援制御部3は、強い表示メッセージを表示するよう表示出力制御部6に指示し、支援情報を音声出力するように音声出力制御部7に指示し、自車両の走行を自動制御するように走行出力制御部15に指示する。表示出力制御部6は、強い表示メッセージを表示するようにディスプレイ9を制御する。また、音声出力制御部7は、表示メッセージと同じ内容の支援情報を音声出力するようにスピーカ10を制御する。さらに、走行出力制御部15は、自車両の走行を自動制御するように走行制御装置17を制御する。これにより、ディスプレイ9には弱い表示メッセージが表示され、スピーカ10からは表示メッセージと同じ内容の支援情報を音声出力される。また、走行制御装置17は、自車両の走行を自動制御する。
<2-3.変形例>
図17は、変形例による運転支援装置18の構成の一例を示すブロック図である。図17に示すように、運転支援装置18は、出力制御部5が映像記録制御部12を有することを特徴としている。その他の構成および動作は、図10に示す運転支援装置14と同様であるため、ここでは説明を省略する。
図17は、変形例による運転支援装置18の構成の一例を示すブロック図である。図17に示すように、運転支援装置18は、出力制御部5が映像記録制御部12を有することを特徴としている。その他の構成および動作は、図10に示す運転支援装置14と同様であるため、ここでは説明を省略する。
映像記録制御部12は、支援制御部3からの指示に従って、運転状況判断部2が煽り運転または苛立たせ運転と判断したときの運転状況の映像を記録するようドライブレコーダ13を制御する。
ドライブレコーダ13は、映像記録制御部12からの指示に従って、自車両の運転状況の映像を記録する。
例えば、運転状況判断部2が図11~15に示す特定行動を煽り運転と判断した場合、支援制御部3は、上述で説明した通り表示出力制御部6に指示し、自車両が煽り運転を行ったときの運転状況の映像を記録するよう映像記録制御部12に指示する。当該処理は、図9の映像記録制御部12の処理と同様である。
また、例えば、運転状況判断部2が図11~15に示す特定行動を一時的または継続的な苛立たせ運転と判断した場合、支援制御部3は、上述で説明した通り表示出力制御部6および音声出力制御部7に指示し、自車両が一時的または継続的な苛立たせ運転を行ったときの運転状況の映像を記録するよう映像記録制御部12に指示する。当該処理は、図9の映像記録制御部12の処理と同様である。
<2-4.効果>
以上のことから、実施の形態2によれば、運転状況判断部2は、自車両が煽り運転または苛立たせ運転を行ったか否かを判断し、苛立たせ運転である場合は一時的か継続的であるかを判断する。また、支援制御部3は、煽り運転、一時的な苛立たせ運転、または継続的な苛立たせ運転のそれぞれに応じた運転支援を行うよう出力制御部5を制御する。これにより、煽り運転、一時的な苛立たせ運転、または継続的な苛立たせ運転を行った運転者に対して適切な運転支援を行うことが可能となる。
以上のことから、実施の形態2によれば、運転状況判断部2は、自車両が煽り運転または苛立たせ運転を行ったか否かを判断し、苛立たせ運転である場合は一時的か継続的であるかを判断する。また、支援制御部3は、煽り運転、一時的な苛立たせ運転、または継続的な苛立たせ運転のそれぞれに応じた運転支援を行うよう出力制御部5を制御する。これにより、煽り運転、一時的な苛立たせ運転、または継続的な苛立たせ運転を行った運転者に対して適切な運転支援を行うことが可能となる。
<実施の形態3>
<3-1.構成>
図18は、実施の形態3による運転支援装置19の構成の一例を示すブロック図である。運転支援装置19は、運転状況判断部2による運転状況の判断に特徴を有している。その他の構成および基本的な動作は、実施の形態1または実施の形態2と同様であるため、ここでは詳細な説明を省略する。
<3-1.構成>
図18は、実施の形態3による運転支援装置19の構成の一例を示すブロック図である。運転支援装置19は、運転状況判断部2による運転状況の判断に特徴を有している。その他の構成および基本的な動作は、実施の形態1または実施の形態2と同様であるため、ここでは詳細な説明を省略する。
運転状況判断部2は、車両センサ8および車両ボディ機器20に接続されている。車両センサ8については、実施の形態1,2で説明した車両センサ8と同様である。車両ボディ機器20は、警告音を発するクラクション、および前方に向けて光を照射する前照灯などを含む。
運転状況判断部2は、車両センサ8および車両ボディ機器20から取得した情報に基づいて、煽り運転および苛立たせ運転を含む運転状況を判断する。また、運転状況判断部2は、苛立たせ運転と判断した場合、当該苛立たせ運転が一時的であるのか継続的であるのかを判断する。
運転状況判断部2が車両ボディ機器20から取得した情報に基づいて煽り運転および苛立たせ運転を判断する際に参照する特定行動としては、例えば図19に示す「警告音または照明の乱発」が挙げられる。なお、図19に示す各特定行動は例示であり、その他の運転を特定行動としてもよい。
図19に示す「警告音または照明の乱発」は、自車両の運転者が前方の他車両に対して警告音を多用すること、または自車両の運転者が前方の他車両に対してパッシングなど照明の点滅を多用することである。この場合、運転状況判断部2は、車両センサ8から取得した自車両および他車両が走行中の車線の情報に基づいて、自車両および他車両が同じ車線に存在しているか否かを判断する。また、運転状況判断部2は、車両ボディ機器20から取得した警告音または照明の使用状況に基づいて、警告音または照明の点滅を多用しているか否かを判断する。そして、運転状況判断部2は、自車両の運転者が「警告音または照明の乱発」を行っていると判断すると、どのような「警告音または照明の乱発」を行っているのかに基づいて、煽り運転または苛立たせ運転のいずれを行っているのかを判断する。
具体的には、運転状況判断部2は、自車両の運転者が「警告音または照明の乱発」を予め定められた回数以上繰り返して実行している場合に煽り運転を行っていると判断する。例えば、運転状況判断部2は、同じ他車両に対して4回以上、繰り返して警告音を発した場合に煽り運転を行っていると判断する。また、運転状況判断部2は、4秒間以上の警告音を予め定められた回数以上繰り返して発した場合に煽り運転を行っていると判断する。
また、運転状況判断部2は、自車両の運転者が「警告音または照明の乱発」を一時的または継続的に実行している場合に一時的または継続的な苛立たせ運転を行っていると判断する。例えば、運転状況判断部2は、1~2秒間の警告音を発した場合に一時的な苛立たせ運転を行っていると判断する。また、運転状況判断部2は、2~4秒間の警告音を発した場合に継続的な苛立たせ運転を行っていると判断する。さらに、運転状況判断部2は、2~3回の警告音を発した場合に継続的な苛立たせ運転を行っていると判断する。
支援制御部3は、煽り運転、一時的な苛立たせ運転、および継続的な苛立たせ運転のそれぞれに対応する運転支援を行うよう表示出力制御部6および音声出力制御部7を制御する。
例えば、図19に示すように、自車両の運転者が行っている「警告音または照明の乱発」が煽り運転である場合、支援制御部3は、強い表示メッセージを表示するよう表示出力制御部6に指示する。このとき、支援制御部3は、音声出力制御部7に対しては指示しない。表示出力制御部6は、運転者に対する支援情報として強い表示メッセージを表示するようにディスプレイ9を制御する。ディスプレイ9には、例えば、「警告:複数回クラクションが鳴らされたと判断されました。過度なクラクションはやめてください。」などの表示メッセージが表示される。
自車両の運転者が行っている「警告音または照明の乱発」が一時的な苛立たせ運転である場合、支援制御部3は、弱い表示メッセージを表示するよう表示出力制御部6に指示し、支援情報を音声出力するように音声出力制御部7に指示する。表示出力制御部6は、運転者に対する支援情報として弱い表示メッセージを表示するようにディスプレイ9を制御する。ディスプレイ9には、例えば、「注意:複数回クラクションが鳴らされたと判断されました。適度な警告音の使用を心がけてください。」などの表示メッセージが表示される。また、音声出力制御部7は、表示メッセージと同じ内容の支援情報を音声出力するようにスピーカ10を制御する。スピーカ10からは、表示メッセージと同じ内容の支援情報を音声出力される。
自車両の運転者が行っている「警告音または照明の乱発」が継続的な苛立たせ運転である場合、煽り運転の場合と同様に強い表示メッセージをディスプレイ9に表示するとともに、表示メッセージと同じ内容の支援情報をスピーカ10から音声出力する。
<3-2.動作>
図20は、運転支援装置19の動作の一例を示すフローチャートである。なお、図20のステップS33~ステップS38は、図16のステップS23~ステップS28に対応しているため、ここでは説明を省略する。以下では、ステップS31およびステップS32について説明する。
図20は、運転支援装置19の動作の一例を示すフローチャートである。なお、図20のステップS33~ステップS38は、図16のステップS23~ステップS28に対応しているため、ここでは説明を省略する。以下では、ステップS31およびステップS32について説明する。
ステップS31において、運転状況判断部2は、車両センサ8および車両ボディ機器20から取得した情報に基づいて、煽り運転および苛立たせ運転を含む運転状況を判断する。
ステップS32において、運転状況判断部2は、運転状況が煽り運転または苛立たせ運転であるか否かを判断する。煽り運転または苛立たせ運転である場合は、ステップS33に移行する。一方、煽り運転または苛立たせ運転でない場合は、ステップS38に移行する。
<3-3.変形例>
図21は、変形例による運転支援装置21の構成の一例を示すブロック図である。図21に示すように、運転支援装置21は、出力制御部5が映像記録制御部12を有することを特徴としている。その他の構成および動作は、図10に示す運転支援装置14と同様であるため、ここでは説明を省略する。
図21は、変形例による運転支援装置21の構成の一例を示すブロック図である。図21に示すように、運転支援装置21は、出力制御部5が映像記録制御部12を有することを特徴としている。その他の構成および動作は、図10に示す運転支援装置14と同様であるため、ここでは説明を省略する。
映像記録制御部12は、支援制御部3からの指示に従って、運転状況判断部2が煽り運転または苛立たせ運転と判断したときの運転状況の映像を記録するようドライブレコーダ13を制御する。ドライブレコーダ13は、映像記録制御部12からの指示に従って、自車両の運転状況の映像を記録する。
例えば、運転状況判断部2が図19に示す特定行動を煽り運転と判断した場合、支援制御部3は、上述で説明した通り表示出力制御部6に指示し、自車両が煽り運転を行ったときの運転状況の映像を記録するよう映像記録制御部12に指示する。当該処理は、図9の映像記録制御部12の処理と同様である。
また、例えば、運転状況判断部2が図19に示す特定行動を一時的または継続的な苛立たせ運転と判断した場合、支援制御部3は、上述で説明した通り表示出力制御部6および音声出力制御部7に指示し、自車両が一時的または継続的な苛立たせ運転を行ったときの運転状況の映像を記録するよう映像記録制御部12に指示する。当該処理は、図9の映像記録制御部12と同様である。
<3-4.効果>
以上のことから、実施の形態3によれば、運転状況判断部2は、車両ボディ機器20から取得した情報に基づいて自車両が煽り運転または苛立たせ運転を行ったか否かを判断し、苛立たせ運転である場合は一時的か継続的であるかを判断する。また、支援制御部3は、煽り運転、一時的な苛立たせ運転、または継続的な苛立たせ運転のそれぞれに応じた運転支援を行うよう出力制御部5を制御する。これにより、煽り運転、一時的な苛立たせ運転、または継続的な苛立たせ運転を行った運転者に対して適切な運転支援を行うことが可能となる。
以上のことから、実施の形態3によれば、運転状況判断部2は、車両ボディ機器20から取得した情報に基づいて自車両が煽り運転または苛立たせ運転を行ったか否かを判断し、苛立たせ運転である場合は一時的か継続的であるかを判断する。また、支援制御部3は、煽り運転、一時的な苛立たせ運転、または継続的な苛立たせ運転のそれぞれに応じた運転支援を行うよう出力制御部5を制御する。これにより、煽り運転、一時的な苛立たせ運転、または継続的な苛立たせ運転を行った運転者に対して適切な運転支援を行うことが可能となる。
<実施の形態4>
<4-1.構成>
図22は、実施の形態4による運転支援装置22の構成の一例を示すブロック図である。運転支援装置22は、出力制御部5が映像記録制御部12のみを有し、運転状況判断部2による運転状況の判断に特徴を有している。
<4-1.構成>
図22は、実施の形態4による運転支援装置22の構成の一例を示すブロック図である。運転支援装置22は、出力制御部5が映像記録制御部12のみを有し、運転状況判断部2による運転状況の判断に特徴を有している。
運転状況判断部2は、車両センサ8および周辺検出装置23に接続されている。車両センサ8については、実施の形態1~3で説明した車両センサ8と同様である。周辺検出装置23は、自車両に対して他車両が発した警告音を集音するマイク、および自車両に対して他車両が行ったパッシングなどの光の照射を検出する照度センサなどを含む。すなわち、周辺検出装置23は、自車両に対する他車両の行為を検出する。
運転状況判断部2は、車両センサ8および周辺検出装置23から取得した情報に基づいて、煽り運転および苛立たせ運転を含む運転状況を判断する。具体的には、運転状況判断部2は、車両センサ8から取得した情報に基づいて、自車両の周辺に他車両が存在しているか否かを判断する。また、運転状況判断部2は、周辺検出装置23から取得した情報に基づいて、他車両が自車両に対して警告音またはパッシングなどの光の照射を行ったか否かを判断する。そして、運転状況判断部2は、他車両が自車両に対して警告音またはパッシングなどの光の照射を行ったと判断した場合、自車両の運転者が他車両に対して煽り運転または苛立たせ運転を行ったと判断する。
運転状況判断部2が周辺検出装置23から取得した情報に基づいて煽り運転および苛立たせ運転を判断する際に参照する特定行動としては、例えば図23に示す「他車両の行為の検出」が挙げられる。なお、図23に示す特定行動は例示であり、その他の運転を特定行動としてもよい。
図23に示す「他車両の行為の検出」は、自車両の周辺に存在している他車両が、自車両に対して警告音を発したことを検出する、または自車両に対してパッシングなどの光を照射したことを検出することである。この場合、運転状況判断部2は、周辺検出装置23から取得した自車両に対する他車両の警告音または照明の使用状況を判断する。そして、運転状況判断部2は、自車両に対して他車両がどのように警告音または照明を使用しているのかに基づいて、自車両の運転者が煽り運転または苛立たせ運転のいずれを行っているのかを判断する。具体的には、運転状況判断部2は、自車両の周辺に存在している他車両が、自車両に対する警告音またはパッシングなどの光の照射を予め定められた回数以上繰り返して実行している場合に、自車両の運転者が煽り運転を行っていると判断する。また、運転状況判断部2は、自車両の周辺に存在している他車両が、自車両に対する警告音またはパッシングなどの光の照射を一時的に実行している場合に、自車両の運転者が苛立たせ運転を行っていると判断する。
支援制御部3は、煽り運転または苛立たせ運転のそれぞれに対応する運転支援を行うよう映像記録制御部12を制御する。
例えば、運転状況判断部2が、図23に示す特定行動に基づいて自車両の運転者が煽り運転を行っていると判断した場合、支援制御部3は、他車両から行為を受ける前の自車両の運転状況の映像を記録するよう映像記録制御部12に指示する。当該処理は、図9の映像記録制御部12の処理と同様である。
また、例えば、運転状況判断部2が図23に示す特定行動を苛立たせ運転と判断した場合、支援制御部3は、他車両から行為を受ける前の自車両の運転状況の映像を記録するよう映像記録制御部12に指示する。当該処理は、図9の映像記録制御部12の処理と同様である。この場合、自車両が停車したときに、ドライブレコーダ13に記録した映像を確認するか否かを運転者に問い合わせる。
<4-2.動作>
図24は、運転支援装置22の動作の一例を示すフローチャートである。
図24は、運転支援装置22の動作の一例を示すフローチャートである。
ステップS41において、運転状況判断部2は、車両センサ8および周辺検出装置23から取得した情報に基づいて、煽り運転および苛立たせ運転を含む運転状況を判断する。ここで判断される運転状況は、自車両の運転状況である。
ステップS42において、運転状況判断部2は、自車両の運転状況が煽り運転または苛立たせ運転であるか否かを判断する。煽り運転または苛立たせ運転である場合は、ステップS43に移行する。一方、煽り運転または苛立たせ運転でない場合は、ステップS46に移行する。
ステップS43において、運転状況判断部2は、煽り運転であるか否かを判断する。煽り運転である場合は、ステップS44に移行する。一方、煽り運転でない場合は、ステップS45に移行する。
ステップS44において、支援制御部3は、煽り運転に応じた運転支援を行う。例えば、運転状況判断部2が図23に示す特定行動から自車両が煽り運転を行ったと判断した場合、支援制御部3は、他車両から行為を受ける前の自車両の運転状況の映像を記録するよう映像記録制御部12に指示する。映像記録制御部12は、他車両から行為を受ける前の自車両の運転状況の映像を記録する。これにより、ドライブレコーダ13には、他車両から行為を受ける前の自車両の運転状況の映像を記録される。
ステップS45において、支援制御部3は、苛立たせ運転に応じた運転支援を行う。例えば、運転状況判断部2が図23に示す特定行動から自車両が苛立たせ運転を行ったと判断した場合、支援制御部3は、他車両から行為を受ける前の自車両の運転状況の映像を記録するよう映像記録制御部12に指示する。映像記録制御部12は、他車両から行為を受ける前の自車両の運転状況の映像を記録する。これにより、ドライブレコーダ13には、他車両から行為を受ける前の自車両の運転状況の映像を記録される。また、自車両が停車したときに、ドライブレコーダ13に記録した映像を確認するか否かを運転者に問い合わせる。
ステップS46において、支援制御部3は、運転支援を行わない。すなわち、支援制御部3は、映像記録制御部12に指示しない。
<4-3.効果>
以上のことから、実施の形態4によれば、運転状況判断部2は、周辺検出装置23から取得した情報に基づいて、自車両が煽り運転または苛立たせ運転を行ったか否かを判断する。また、支援制御部3は、煽り運転または苛立たせ運転のそれぞれに応じた運転支援を行うよう出力制御部5を制御する。これにより、煽り運転または苛立たせ運転を行った運転者に対して適切な運転支援を行うことが可能となる。
以上のことから、実施の形態4によれば、運転状況判断部2は、周辺検出装置23から取得した情報に基づいて、自車両が煽り運転または苛立たせ運転を行ったか否かを判断する。また、支援制御部3は、煽り運転または苛立たせ運転のそれぞれに応じた運転支援を行うよう出力制御部5を制御する。これにより、煽り運転または苛立たせ運転を行った運転者に対して適切な運転支援を行うことが可能となる。
<実施の形態5>
図25は、実施の形態5による運転支援装置24の構成の一例を示すブロック図である。運転支援装置24の各構成要素および動作は、実施の形態1~4のそれぞれで説明した運転支援装置を組み合わせた構成および動作であるため、ここでは説明を省略する。
図25は、実施の形態5による運転支援装置24の構成の一例を示すブロック図である。運転支援装置24の各構成要素および動作は、実施の形態1~4のそれぞれで説明した運転支援装置を組み合わせた構成および動作であるため、ここでは説明を省略する。
以上のことから、実施の形態5によれば、各実施の形態1~4で説明した効果を得ることができる。
<ハードウェア構成>
実施の形態1で説明した運転支援装置4における運転状況判断部2、支援制御部3、表示出力制御部6、および音声出力制御部7の各機能は、処理回路により実現される。すなわち、運転支援装置4は、自車両の運転者の運転状況を判断し、煽り運転または苛立たせ運転に応じて運転支援を制御し、支援情報を表示する制御を行い、支援情報を音声出力する制御を行うための処理回路を備える。処理回路は、専用のハードウェアであってもよく、メモリに格納されるプログラムを実行するプロセッサ(CPU、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、DSP(Digital Signal Processor)ともいう)であってもよい。
実施の形態1で説明した運転支援装置4における運転状況判断部2、支援制御部3、表示出力制御部6、および音声出力制御部7の各機能は、処理回路により実現される。すなわち、運転支援装置4は、自車両の運転者の運転状況を判断し、煽り運転または苛立たせ運転に応じて運転支援を制御し、支援情報を表示する制御を行い、支援情報を音声出力する制御を行うための処理回路を備える。処理回路は、専用のハードウェアであってもよく、メモリに格納されるプログラムを実行するプロセッサ(CPU、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、DSP(Digital Signal Processor)ともいう)であってもよい。
処理回路が専用のハードウェアである場合、図26に示すように、処理回路25は、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC(Application Specific Integrated Circuit)、FPGA(Field Programmable Gate Array)、またはこれらを組み合わせたものが該当する。運転状況判断部2、支援制御部3、表示出力制御部6、および音声出力制御部7の各機能をそれぞれ処理回路25で実現してもよく、各機能をまとめて1つの処理回路25で実現してもよい。
処理回路25が図27に示すプロセッサ26である場合、運転状況判断部2、支援制御部3、表示出力制御部6、および音声出力制御部7の各機能は、ソフトウェア、ファームウェア、またはソフトウェアとファームウェアとの組み合わせにより実現される。ソフトウェアまたはファームウェアは、プログラムとして記述され、メモリ27に格納される。プロセッサ26は、メモリ27に記録されたプログラムを読み出して実行することにより、各機能を実現する。すなわち、運転支援装置4は、自車両の運転者の運転状況を判断するステップ、煽り運転または苛立たせ運転に応じて運転支援を制御するステップ、支援情報を表示する制御を行うステップ、支援情報を音声出力する制御を行うステップが結果的に実行されることになるプログラムを格納するためのメモリ27を備える。また、これらのプログラムは、運転状況判断部2、支援制御部3、表示出力制御部6、および音声出力制御部7の手順または方法をコンピュータに実行させるものであるともいえる。ここで、メモリとは、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ、EPROM(Erasable Programmable Read Only Memory)、EEPROM(Electrically Erasable Programmable Read Only Memory)等の不揮発性または揮発性の半導体メモリ、磁気ディスク、フレキシブルディスク、光ディスク、コンパクトディスク、DVD(Digital Versatile Disc)等、または、今後使用されるあらゆる記憶媒体であってもよい。
なお、運転状況判断部2、支援制御部3、表示出力制御部6、および音声出力制御部7の各機能について、一部の機能を専用のハードウェアで実現し、他の機能をソフトウェアまたはファームウェアで実現するようにしてもよい。
このように、処理回路は、ハードウェア、ソフトウェア、ファームウェア、またはこれらの組み合わせによって、上述の各機能を実現することができる。
なお、上記では、実施の形態1で説明した運転支援装置4のハードウェア構成について説明したが、各実施の形態1~5で説明した運転支援装置11、運転支援装置14、運転支援装置18、運転支援装置19、運転支援装置21、運転支援装置24のハードウェア構成についても同様である。
<システム構成>
以上で説明した運転支援装置は、車載用ナビゲーション装置、すなわちカーナビゲーション装置だけでなく、車両に搭載可能なPND(Portable Navigation Device)、および車両の外部に設けられたサーバなどを適宜に組み合わせてシステムとして構築されるナビゲーション装置、あるいはシステムとして構築されるナビゲーション装置以外の装置にも適用することができる。この場合、運転支援装置の各機能あるいは各構成要素は、上記システムを構築する各機能に分散して配置される。
以上で説明した運転支援装置は、車載用ナビゲーション装置、すなわちカーナビゲーション装置だけでなく、車両に搭載可能なPND(Portable Navigation Device)、および車両の外部に設けられたサーバなどを適宜に組み合わせてシステムとして構築されるナビゲーション装置、あるいはシステムとして構築されるナビゲーション装置以外の装置にも適用することができる。この場合、運転支援装置の各機能あるいは各構成要素は、上記システムを構築する各機能に分散して配置される。
具体的には、一例として、運転支援装置の機能をサーバに配置することができる。例えば、図28に示すように、車両には、車両センサ8、ディスプレイ9、およびスピーカ10を備える。また、サーバ28には、運転状況判断部2、支援制御部3、表示出力制御部6、および音声出力制御部7を備える。このような構成とすることによって、運転支援システムを構築することができる。
また、上記の実施の形態における動作を実行するソフトウェアを、例えばサーバに組み込んでもよい。このソフトウェアをサーバが実行することにより実現される運転支援方法は、自車両の運転者が他車両に対して意図的に行う煽り運転と、自車両の運転者の意図ではないが他車両の運転者を苛立たせる苛立たせ運転とを含む運転状況を判断し、煽り運転と判断した場合と苛立たせ運転と判断した場合とのそれぞれに応じて自車両の運転者の運転を支援する制御を行うことを含む。
このように、上記の実施の形態における動作を実行するソフトウェアをサーバに組み込んで動作させることによって、上記の実施の形態と同様の効果が得られる。
なお、上記では、実施の形態1で説明した運転支援装置4の各機能をサーバに適用する場合について説明したが、各実施の形態1~5で説明した運転支援装置11、運転支援装置14、運転支援装置18、運転支援装置19、運転支援装置21、運転支援装置24の各機能をサーバに適用する場合についても同様である。
なお、本開示の範囲内において、各実施の形態を自由に組み合わせたり、各実施の形態を適宜、変形、省略したりすることが可能である。
本開示は詳細に説明されたが、上記した説明は、すべての態様において、例示であって、限定的なものではない。例示されていない無数の変形例が想定され得るものと解される。
1 運転支援装置、2 運転状況判断部、3 支援制御部、4 運転支援装置、5 出力制御部、6 表示出力制御部、7 音声出力制御部、8 車両センサ、9 ディスプレイ、10 スピーカ、11 運転支援装置、12 映像記録制御部、13 ドライブレコーダ、14 運転支援装置、15 走行出力制御部、16 GNSSシステム、17 走行制御装置、18 運転支援装置、19 運転支援装置、20 車両ボディ機器、21 運転支援装置、22 運転支援装置、23 周辺検出装置、24 運転支援装置、25 処理回路、26 プロセッサ、27 メモリ、28 サーバ。
Claims (20)
- 自車両の運転者が他車両に対して意図的に行う煽り運転と、前記自車両の運転者の意図ではないが他車両の運転者を苛立たせる苛立たせ運転とを含む運転状況を判断する運転状況判断部と、
前記運転状況判断部が前記煽り運転と判断した場合と前記苛立たせ運転と判断した場合とのそれぞれに応じて前記自車両の運転者の運転を支援する制御を行う支援制御部と、
を備える、運転支援装置。 - 前記運転状況判断部は、前記自車両が同一の前記他車両に対して特定行動を予め定められた回数以上実行している場合に前記煽り運転を行っていると判断し、前記自車両が同一の前記他車両に対して前記特定行動を一時的または継続的に実行している場合に前記苛立たせ運転を行っていると判断する、請求項1に記載の運転支援装置。
- 前記苛立たせ運転は、一時的な苛立たせ運転と継続的な苛立たせ運転とを含み、
前記支援制御部は、前記一時的な苛立たせ運転と前記継続的な苛立たせ運転とのそれぞれに応じて前記自車両の運転者の運転を支援する制御を行う、請求項1に記載の運転支援装置。 - 前記特定行動は、前記自車両を追い越そうとしている前記他車両の走行を妨げる走行を含む、請求項2に記載の運転支援装置。
- 前記他車両の走行を妨げる走行は、前記自車両および前記他車両が追越車線に存在し、かつ前記自車両が前記他車両の前方に存在する走行を含む、請求項4に記載の運転支援装置。
- 前記他車両の走行を妨げる走行は、前記自車両および前記他車両が追越不可の道路に存在し、かつ前記自車両が前記他車両の前方に存在する走行を含む、請求項4に記載の運転支援装置。
- 前記特定行動は、前記自車両が予め定められた距離以下まで前記他車両に接近する走行、および前記他車両が前記自車両に対する回避行動を起こさせる走行を含む、請求項2に記載の運転支援装置。
- 前記他車両に接近する走行、および前記回避行動を起こさせる走行は、前記自車両が隣の車線を走行している前記他車両に対して幅寄せをする走行、前記他車両の前方に前記自車両が急に侵入する割り込みをする走行、前記自車両が前記他車両の前方で急ブレーキをかける走行、および前記他車両の周辺で前記自車両がふらつく走行を含む、請求項7に記載の運転支援装置。
- 前記特定行動は、前記自車両が前記他車両に対して車両ボディ機器を使用する行為を含む、請求項2に記載の運転支援装置。
- 前記車両ボディ機器を使用する行為は、前方の前記他車両に対して警告音を多用すること、および前方の前記他車両に対して照明の点滅を多用することを含む、請求項9に記載の運転支援装置。
- 前記支援制御部からの指示に従って前記運転者に対して運転を支援する支援情報を表示する制御を行う表示出力制御部と、
前記支援制御部からの指示に従って前記運転者に対して前記支援情報を音声で出力する制御を行う音声出力制御部と、
をさらに備え、
前記運転状況判断部が前記煽り運転と判断した場合、前記表示出力制御部は前記支援情報を表示する制御を行い、かつ前記音声出力制御部は前記支援情報を音声で出力する制御を行わず、
前記運転状況判断部が前記苛立たせ運転と判断した場合、前記表示出力制御部は前記支援情報を表示する制御を行い、かつ前記音声出力制御部は前記支援情報を音声で出力する制御を行う、請求項1に記載の運転支援装置。 - 前記自車両および前記他車両が追越不可の道路に存在し、かつ前記自車両が前記他車両の前方に存在する場合、前記運転状況判断部は前記煽り運転または前記苛立たせ運転と判断し、
前記表示出力制御部は、前記自車両の走行先に存在する空きスペースを表示する制御を行う、請求項11に記載の運転支援装置。 - 前記支援制御部からの指示に従って前記自車両の走行の自動制御を行う走行出力制御部をさらに備える、請求項1に記載の運転支援装置。
- 前記自車両および前記他車両が追越車線に存在し、かつ前記自車両が前記他車両の前方に存在する、前記運転状況判断部は前記煽り運転または前記苛立たせ運転と判断し、
前記走行出力制御部は、前記自車両が走行車線へ車線変更するように前記自動制御を行う、請求項13に記載の運転支援装置。 - 前記自車両および前記他車両が追越不可の道路に存在し、かつ前記自車両が前記他車両の前方に存在する場合、前記運転状況判断部は前記煽り運転または前記苛立たせ運転と判断し、
前記走行出力制御部は、前記自車両の走行先に存在する空きスペースに前記自車両を移動させるように前記自動制御を行う、請求項13に記載の運転支援装置。 - 前記支援制御部からの指示に従って、前記運転状況判断部が前記煽り運転または前記苛立たせ運転と判断したときの運転状況の映像を記録する制御を行う映像記録制御部をさらに備える、請求項1に記載の運転支援装置。
- 前記映像記録制御部は、前記映像を外部のサーバに記録する制御を行う、請求項16に記載の運転支援装置。
- 前記支援制御部からの指示に従って前記運転者に対して運転を支援する支援情報を表示する制御を行う表示出力制御部をさらに備え、
前記表示出力制御部は、前記映像記録制御部の制御によって記録された前記映像を表示する制御を行う、請求項16に記載の運転支援装置。 - 前記運転状況判断部は、前記自車両に対する前記他車両の行為に基づいて、前記自車両が前記苛立たせ運転をしたか否かを判断し、
前記運転状況判断部が前記苛立たせ運転をしたと判断した場合、前記映像記録制御部は、前記他車両の行為前における前記自車両の運転状況を記録する制御を行う、請求項16に記載の運転支援装置。 - 自車両の運転者が他車両に対して意図的に行う煽り運転と、前記自車両の運転者の意図ではないが他車両の運転者を苛立たせる苛立たせ運転とを含む運転状況を判断し、
前記煽り運転と判断した場合と前記苛立たせ運転と判断した場合とのそれぞれに応じて前記自車両の運転者の運転を支援する制御を行う、運転支援方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022543220A JPWO2022038741A1 (ja) | 2020-08-20 | 2020-08-20 | |
| PCT/JP2020/031441 WO2022038741A1 (ja) | 2020-08-20 | 2020-08-20 | 運転支援装置および運転支援方法 |
| US18/015,243 US20230294720A1 (en) | 2020-08-20 | 2020-08-20 | Drive assist apparatus and drive assist method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/031441 WO2022038741A1 (ja) | 2020-08-20 | 2020-08-20 | 運転支援装置および運転支援方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022038741A1 true WO2022038741A1 (ja) | 2022-02-24 |
Family
ID=80323560
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/031441 WO2022038741A1 (ja) | 2020-08-20 | 2020-08-20 | 運転支援装置および運転支援方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20230294720A1 (ja) |
| JP (1) | JPWO2022038741A1 (ja) |
| WO (1) | WO2022038741A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024087887A1 (zh) * | 2022-10-25 | 2024-05-02 | 中国第一汽车股份有限公司 | 鲁莽驾驶行为标记方法、车辆、云端服务器和存储介质 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006205773A (ja) * | 2005-01-25 | 2006-08-10 | Fujitsu Ten Ltd | 運転支援装置 |
| JP2010257071A (ja) * | 2009-04-22 | 2010-11-11 | Toyota Motor Corp | 車両制御装置 |
| JP2014191632A (ja) * | 2013-03-27 | 2014-10-06 | Fuji Heavy Ind Ltd | 車線変更支援装置 |
| JP2019119371A (ja) * | 2018-01-09 | 2019-07-22 | 三菱自動車工業株式会社 | 煽り運転解消システム |
| JP2020024580A (ja) * | 2018-08-07 | 2020-02-13 | 矢崎エナジーシステム株式会社 | 運転評価装置および車載器 |
| JP2020052751A (ja) * | 2018-09-27 | 2020-04-02 | ダイハツ工業株式会社 | あおり運転検出装置 |
| JP2020087140A (ja) * | 2018-11-28 | 2020-06-04 | 京セラ株式会社 | 画像処理装置、撮像装置、移動体及び画像処理方法 |
-
2020
- 2020-08-20 WO PCT/JP2020/031441 patent/WO2022038741A1/ja active Application Filing
- 2020-08-20 JP JP2022543220A patent/JPWO2022038741A1/ja active Pending
- 2020-08-20 US US18/015,243 patent/US20230294720A1/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006205773A (ja) * | 2005-01-25 | 2006-08-10 | Fujitsu Ten Ltd | 運転支援装置 |
| JP2010257071A (ja) * | 2009-04-22 | 2010-11-11 | Toyota Motor Corp | 車両制御装置 |
| JP2014191632A (ja) * | 2013-03-27 | 2014-10-06 | Fuji Heavy Ind Ltd | 車線変更支援装置 |
| JP2019119371A (ja) * | 2018-01-09 | 2019-07-22 | 三菱自動車工業株式会社 | 煽り運転解消システム |
| JP2020024580A (ja) * | 2018-08-07 | 2020-02-13 | 矢崎エナジーシステム株式会社 | 運転評価装置および車載器 |
| JP2020052751A (ja) * | 2018-09-27 | 2020-04-02 | ダイハツ工業株式会社 | あおり運転検出装置 |
| JP2020087140A (ja) * | 2018-11-28 | 2020-06-04 | 京セラ株式会社 | 画像処理装置、撮像装置、移動体及び画像処理方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024087887A1 (zh) * | 2022-10-25 | 2024-05-02 | 中国第一汽车股份有限公司 | 鲁莽驾驶行为标记方法、车辆、云端服务器和存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230294720A1 (en) | 2023-09-21 |
| JPWO2022038741A1 (ja) | 2022-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108602513B (zh) | 行驶辅助装置 | |
| US9487139B1 (en) | Determining a driver alert level for a vehicle alert system and method of use | |
| JP6611085B2 (ja) | 車両制御装置 | |
| CN111278702B (zh) | 车辆控制装置、具有该车辆控制装置的车辆以及控制方法 | |
| JP2017178267A (ja) | 運転支援方法およびそれを利用した運転支援装置、自動運転制御装置、車両、プログラム | |
| CN110718093B (zh) | 针对车辆鸣笛的处理方法和第一车辆 | |
| JP2006113918A (ja) | 運転支援装置 | |
| JPH1153694A (ja) | 交差点警報装置 | |
| JP2006528106A (ja) | 駐車プロセス中に複数車線の車道の対向車線に対して相対的に車両の位置および/または所期の位置を求めるための方法および装置 | |
| JP2016005932A (ja) | 車両の制御装置、及び車両 | |
| JPWO2012157633A1 (ja) | 走行制御装置 | |
| CN110582436B (zh) | 转向辅助系统和方法 | |
| US9789815B2 (en) | Navigation device, navigation method, and computer program product | |
| US20220363266A1 (en) | Systems and methods for improving driver attention awareness | |
| JP2021046182A (ja) | 自動運転車 | |
| JP2022159189A (ja) | 運転支援装置 | |
| WO2022038741A1 (ja) | 運転支援装置および運転支援方法 | |
| JP4873255B2 (ja) | 車両用報知システム | |
| JP4924409B2 (ja) | 走行支援装置 | |
| JP2020009285A (ja) | 運転支援装置,方法,プログラム | |
| JP2008191890A (ja) | 安全走行支援装置 | |
| JP2017054441A (ja) | 警報制御装置 | |
| JP2008150001A (ja) | 追従走行装置 | |
| CN115140062A (zh) | 驾驶辅助装置 | |
| JP6983335B2 (ja) | 運転判定装置および運転判定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20950306 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022543220 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20950306 Country of ref document: EP Kind code of ref document: A1 |