WO2020235393A1 - 車両制御装置 - Google Patents
車両制御装置 Download PDFInfo
- Publication number
- WO2020235393A1 WO2020235393A1 PCT/JP2020/018969 JP2020018969W WO2020235393A1 WO 2020235393 A1 WO2020235393 A1 WO 2020235393A1 JP 2020018969 W JP2020018969 W JP 2020018969W WO 2020235393 A1 WO2020235393 A1 WO 2020235393A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- control device
- vehicle control
- vehicle
- scene
- accelerator
- Prior art date
Links
- 230000006870 function Effects 0.000 claims description 36
- 238000000034 method Methods 0.000 description 28
- 230000008569 process Effects 0.000 description 21
- 230000000694 effects Effects 0.000 description 7
- 230000008859 change Effects 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 238000004590 computer program Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
- B60W60/0055—Handover processes from vehicle to occupant only part of driving tasks shifted to occupants
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
- B60W2540/103—Accelerator thresholds, e.g. kickdown
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/05—Type of road, e.g. motorways, local streets, paved or unpaved roads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/30—Road curve radius
Definitions
- This disclosure relates to a vehicle control device.
- Patent Document 1 The self-driving vehicle is disclosed in Patent Document 1, for example.
- vehicles that can be driven automatically and manually If the driver performs a brake operation or the like while the vehicle is automatically driving, the automatic driving function is turned off.
- the driver may want to drive at a vehicle speed higher than the vehicle speed set by the automatic driving function.
- a specific scene for example, there is an exit route of a car-only road. If the driver wants to drive at a vehicle speed higher than the vehicle speed set by the automatic driving function, the driver has to turn off the automatic driving function by performing a brake operation or the like.
- a vehicle control device capable of turning off at least a part of the automatic driving function without necessarily performing a braking operation.
- One aspect of the present disclosure is a vehicle control device provided in a vehicle capable of automatic driving and manual driving, and a specific scene determination configured to determine whether or not the vehicle is in a preset specific scene.
- a specific operation determination unit configured to determine whether or not the unit and the driver of the vehicle have performed a specific operation including an accelerator operation, and when the vehicle is performing the automatic driving, the vehicle is said to be said.
- the specific scene determination unit determines that the vehicle is in a specific scene and the specific operation determination unit determines that the driver has performed the specific operation, the function of turning off at least a part of the automatic driving function is turned off.
- the vehicle control device which is one aspect of the present disclosure, can turn off at least a part of the automatic driving function without necessarily performing the braking operation.
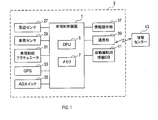
- FIG. 1 The configuration of the vehicle control device 1 will be described with reference to FIGS. 1 and 2.
- the vehicle control device 1 is mounted on the vehicle 3.
- the vehicle 3 can be automatically driven and manually driven.
- automatic operation may be referred to as AD.
- AD on when the automatic operation function is on, it may be called AD on.
- AD off when the automatic driving function is off, it may be called AD off.
- the AD off is a state in which the driver of the vehicle 3 manually drives the vehicle.
- the state of the vehicle 3 is switched from AD on to AD off by the process of step 3 described later. Further, the state of the vehicle 3 is switched from AD off to AD on by a known trigger.
- the vehicle control device 1 includes a microcomputer having a CPU 5 and, for example, a semiconductor memory such as RAM or ROM (hereinafter referred to as memory 7).
- a microcomputer having a CPU 5 and, for example, a semiconductor memory such as RAM or ROM (hereinafter referred to as memory 7).
- Each function of the vehicle control device 1 is realized by the CPU 5 executing a program stored in a non-transitional substantive recording medium.
- the memory 7 corresponds to a non-transitional substantive recording medium in which a program is stored.
- the method corresponding to the program is executed.
- the vehicle control device 1 may include one microcomputer or a plurality of microcomputers.
- the vehicle control device 1 includes a state determination unit 9, a specific scene determination unit 11, a specific operation determination unit 13, a function off unit 15, a scene acquisition unit 17, and a threshold setting unit 19.
- a threshold value display unit 21, a notification unit 23, an automatic operation execution unit 25, and an override unit 26 are provided.
- the vehicle 3 includes a peripheral sensor 27, a vehicle sensor 29, a vehicle control actuator 31, a GPS 33, an AD switch 35, an information presentation unit 37, a communication unit 39, and information for automatic driving. It includes DB41.
- the vehicle control device 1 is connected to these configurations.
- the peripheral sensor 27 detects a target existing around the vehicle 3.
- the peripheral sensor 27 includes, for example, a camera, a rider, and the like.
- the vehicle sensor 29 detects the driving operation of the driver of the vehicle 3. Driving operations include accelerator operation, brake operation, steering operation, and the like.
- the vehicle sensor 29 can detect the amount of depression of the accelerator, the amount of depression of the brake, the amount of steering operation, and the like.
- the vehicle control actuator 31 controls the running state of the vehicle 3 in response to an instruction from the vehicle control device 1.
- the contents of control include acceleration, deceleration, steering and the like.
- GPS 33 acquires the position information of the vehicle 3.
- the AD switch 35 is a switch that can be operated by the driver.
- the state of the vehicle 3 is switched from AD on to AD off, triggered by the operation of the AD switch 35. Further, the state of the vehicle 3 is switched from AD off to AD on, triggered by the operation of the AD switch 35.
- the information presentation unit 37 is provided in the vehicle interior of the vehicle 3.
- the information presentation unit 37 includes, for example, a display and a speaker.
- the information presentation unit 37 can present information to the driver by image or sound.
- the communication unit 39 can perform wireless communication with the information center 43 outside the vehicle 3.
- the communication unit 39 can receive, for example, traffic information, weather information, map information described later, and the like from the information center 43.
- the automatic driving information DB 41 stores map information and the like.
- Map information includes road profiles, number of lanes on roads, speed limits on roads, intersection locations, pedestrian crossing locations, and the like.
- step 1 of FIG. 3 the state determination unit 9 determines whether or not AD is on at the present time. If it is determined that AD is on, this process proceeds to step 2. If it is determined that the AD is off, this process ends and the AD off continues.
- step 2 the function off unit 15 determines whether or not there has been an AD off operation by the driver.
- the AD off operation includes, for example, an operation of the AD switch 35, a brake operation, a steering operation, and the like.
- the function off unit 15 can detect the brake operation and the steering operation by using the vehicle sensor 29. If there is an AD off operation, this process proceeds to step 3. If there is no AD off operation, this process proceeds to step 4.
- step 3 the function off unit 15 switches the state of the vehicle 3 from AD on to AD off.
- step 4 the specific operation determination unit 13 determines whether or not the driver has operated the accelerator.
- the specific operation determination unit 13 can detect the accelerator operation by using the vehicle sensor 29. When the driver operates the accelerator, this process proceeds to step 5. If the driver does not operate the accelerator, this process ends and AD on continues.
- the automatic driving execution unit 25 performs automatic driving by a known method using the peripheral sensor 27, the vehicle control actuator 31, GPS33, the automatic driving information DB 41, and the like.
- step 5 the scene acquisition unit 17 first acquires the scene in which the vehicle 3 currently exists (hereinafter referred to as the current scene).
- a scene is a place.
- the scene acquisition unit 17 acquires the current scene by collating, for example, the position information of the vehicle 3 acquired by using GPS 33 with the map information stored in the automatic driving information DB 41.
- the scene acquisition unit 17 detects landmarks existing around the vehicle 3 by using, for example, the peripheral sensor 27. Examples of landmarks include buildings, terrain, and the like. Next, the scene acquisition unit 17 acquires the relative position information of the vehicle 3 with respect to the detected landmark. Next, the scene acquisition unit 17 acquires the absolute position information of the detected landmark from the map information. Next, the scene acquisition unit 17 acquires the current scene from the relative position information of the vehicle 3 with respect to the detected landmark and the absolute position information of the detected landmark.
- landmarks include buildings, terrain, and the like.
- the scene acquisition unit 17 acquires the relative position information of the vehicle 3 with respect to the detected landmark.
- the scene acquisition unit 17 acquires the absolute position information of the detected landmark from the map information.
- the scene acquisition unit 17 acquires the current scene from the relative position information of the vehicle 3 with respect to the detected landmark and the absolute position information of the detected landmark.
- the specific scene determination unit 11 determines whether or not the current scene is a preset specific scene.
- the specific scene is, for example, a scene in which the driver often desires to drive at a vehicle speed higher than the vehicle speed set by the automatic driving function by turning off AD.
- the specific scene is, for example, a scene in which the vehicle speed set by the automatic driving function is lower than that of other scenes.
- Specific scenes include, for example, a scene of a junction, a scene of an exit road, a scene of a ramp, a scene immediately before an ETC (registered trademark) gate, a scene immediately after an ETC gate, a scene before a curve, and the like.
- step 6 If the current scene is a specific scene, this process proceeds to step 6. If the current scene is not a specific scene, this process proceeds to step 13.
- the threshold setting unit 19 determines whether or not the current scene acquired in step 5 is a scene in which the accelerator threshold needs to be changed (hereinafter referred to as a threshold change scene).
- the threshold change scene is preset.
- the threshold value change scene is, for example, a scene in which an appropriate vehicle speed for safe driving is different from other scenes. Examples of the threshold value changing scene include a scene with a curve having a small curvature, a scene near ETC, and the like.
- the accelerator threshold value is a threshold value used in the determination in step 10 described later.
- step 7 If the current scene is a threshold change scene, this process proceeds to step 7. If the current scene is not a threshold change scene, this process proceeds to step 8.
- step 7 the threshold setting unit 19 sets a special accelerator threshold as the accelerator threshold.
- the special accelerator threshold is a positive value and is smaller than the normal accelerator threshold described later.
- step 8 the threshold setting unit 19 sets a normal accelerator threshold as the accelerator threshold.
- the normal accelerator threshold is a positive value and is greater than the special accelerator threshold.
- the processes of steps 6 to 8 correspond to setting the accelerator threshold value according to the scene in which the vehicle 3 is traveling.
- step 9 the threshold value display unit 21 uses the information presentation unit 37 to display the accelerator threshold value set in step 7 or step 8.
- step 10 the specific operation determination unit 13 determines whether or not the amount of depression of the accelerator is equal to or greater than the accelerator threshold value set in step 7 or step 8. If the amount of depression of the accelerator is equal to or greater than the accelerator threshold value, this process proceeds to step 11. If the amount of depression of the accelerator is less than the accelerator threshold value, this process proceeds to step 13.
- step 11 the specific operation determination unit 13 determines whether or not the accelerator operation continues for a predetermined time or longer. If the accelerator operation continues for a predetermined time or longer, this process proceeds to step 12. If the accelerator operation has not continued for a predetermined time or more, this process proceeds to step 13.
- step 12 the notification unit 23 uses the information presentation unit 37 to notify that AD is turned off after that. After step 12, the process proceeds to step 3.
- step 13 the override unit 26 performs accelerator override.
- Accelerator override is a process of setting the accelerator opening to a value corresponding to the accelerator operation by the driver while AD is on.
- step 5 the vehicle control device 1 determines whether or not the vehicle 3 is in a specific scene. Further, in the steps 4, 10 and 11, the vehicle control device 1 determines whether or not the driver has performed an accelerator operation in which the amount of depression of the accelerator exceeds the accelerator threshold value and continues for a predetermined time or longer. When the vehicle control device 1 determines that the vehicle 3 is in a specific scene when AD is on, and determines that the amount of depression of the accelerator exceeds the accelerator threshold value and the driver performs an accelerator operation that continues for a predetermined time or longer. The state of the vehicle 3 is switched to AD off.
- the vehicle control device 1 can switch the state of the vehicle 3 to AD off even if the driver does not necessarily perform the braking operation.
- An accelerator operation in which the amount of depression of the accelerator exceeds the accelerator threshold value and continues for a predetermined time or longer corresponds to a specific operation.
- the specific operation is an operation including an accelerator operation in which the amount of depression of the accelerator exceeds the accelerator threshold value. Therefore, the vehicle control device 1 can prevent the AD from being turned off when the driver does not want the AD to be turned off.
- the vehicle control device 1 can appropriately set the accelerator threshold value according to the scene in which the vehicle 3 is traveling by the processes of steps 6 to 8.
- the vehicle control device 1 can display the accelerator threshold value. Therefore, the driver can easily understand how much the accelerator operation should be performed to turn off the AD.
- the specific operation is an operation including an accelerator operation that continues for a predetermined time or longer. Therefore, the vehicle control device 1 can prevent the AD from being turned off when the driver does not want the AD to be turned off.
- the specific scene includes the scene of the confluence and the scene of the exit route.
- the scene of the confluence and the scene of the exit road are scenes in which the driver often desires to switch the state of the vehicle 3 to AD off.
- the vehicle control device 1 can switch the state of the vehicle 3 to AD off in the scene of the junction and the scene of the exit route.
- the specific operation is an accelerator operation in which the amount of depression of the accelerator exceeds the accelerator threshold value and continues for a predetermined time or longer.
- the second embodiment is different from the first embodiment in that the specific operation includes a steering operation in addition to the specific operation in the first embodiment. That is, the specific operation in the second embodiment is an operation in which both the accelerator operation and the steering operation are performed.
- the specific operation is an operation of performing both an accelerator operation and a steering operation.
- the specific scene includes the scene before the curve. Therefore, the vehicle control device 1 switches the state of the vehicle 3 to AD off when both the accelerator operation and the steering operation are performed in the scene before the curve. Therefore, when only the accelerator operation is performed in the scene before the curve, the AD is not turned off, so that the safety of the vehicle 3 is further improved.
- step 11 when a positive judgment was made in step 11, all the automatic driving functions were turned off in step 3.
- the automatic operation function when the affirmative judgment is made in the step 11, the automatic operation function is basically turned off in the step 3, but the lateral control function is continued for a predetermined time. Lateral control is steering control. If a positive judgment is made in step 2, for example, all the automatic driving functions are turned off.
- the vehicle control device 1 When the driver performs a specific operation in a specific scene, the vehicle control device 1 continues the lateral control function for a predetermined time. As a result, the safety of the vehicle 3 is further improved. In particular, when a specific operation is performed while the vehicle 3 is changing lanes in a scene of a junction or an exit road, the safety of the vehicle 3 is further improved by continuing the lateral control function for a predetermined time. improves. ⁇ Other embodiments> Although the embodiments of the present disclosure have been described above, the present disclosure is not limited to the above-described embodiments, and can be implemented in various modifications.
- the specific operation may be a combination of an accelerator operation and another driving operation.
- the other driving operation may be a driving operation other than the steering operation.
- the accelerator threshold value may always be constant.
- the vehicle control device 1 and its method described in the present disclosure are provided by configuring a processor and memory programmed to perform one or more functions embodied by a computer program. It may be realized by a dedicated computer. Alternatively, the vehicle control device 1 and its method described in the present disclosure may be realized by a dedicated computer provided by configuring a processor with one or more dedicated hardware logic circuits. Alternatively, the vehicle control unit 1 and its method described in the present disclosure comprises a processor and memory programmed to perform one or more functions and a processor composed of one or more hardware logic circuits. It may be realized by one or more dedicated computers configured by a combination.
- the computer program may also be stored on a computer-readable non-transitional tangible recording medium as an instruction executed by the computer.
- the method for realizing the functions of each part included in the vehicle control device 1 does not necessarily include software, and all the functions may be realized by using one or a plurality of hardware.
- a plurality of functions possessed by one component in the above embodiment may be realized by a plurality of components, or one function possessed by one component may be realized by a plurality of components. .. Further, a plurality of functions possessed by the plurality of components may be realized by one component, or one function realized by the plurality of components may be realized by one component. Further, a part of the configuration of the above embodiment may be omitted. In addition, at least a part of the configuration of the above embodiment may be added or replaced with the configuration of the other above embodiment.
- a system having the vehicle control device 1 as a component, a program for operating a computer as the vehicle control device 1, a non-transitional non-transitional such as a semiconductor memory in which this program is recorded In addition to the vehicle control device 1 described above, a system having the vehicle control device 1 as a component, a program for operating a computer as the vehicle control device 1, a non-transitional non-transitional such as a semiconductor memory in which this program is recorded.
- the present disclosure can also be realized in various forms such as an actual recording medium and a vehicle control method.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Abstract
自動運転及び手動運転が可能な車両(3)は、車両制御装置(1)を備える。車両制御装置は、特定シーン判断ユニット(11)と、特定操作判断ユニット(13)と、機能オフユニット(15)とを備える。特定シーン判断ユニットは、車両が特定シーンにいるか否かを判断する。特定操作判断ユニットは、ドライバがアクセル操作を含む特定操作を行ったか否かを判断する。機能オフユニットは、車両が自動運転を行っているとき、車両が特定シーンにいると判断し、且つ、ドライバが特定操作を行ったと判断した場合、自動運転の機能の少なくとも一部をオフにする。
Description
本国際出願は、2019年5月21日に日本国特許庁に出願された日本国特許出願第2019-95249号に基づく優先権を主張するものであり、日本国特許出願第2019-95249号の全内容を本国際出願に参照により援用する。
本開示は車両制御装置に関する。
近年、自動運転車両が注目されている。自動運転車両は、例えば、特許文献1に開示されている。自動運転及び手動運転が可能な車両がある。この車両が自動運転を行っているときにドライバがブレーキ操作等を行った場合、自動運転の機能はオフになる。
発明者の詳細な検討の結果、以下の課題が見出された。自動運転の機能がオンの状態で車両が特定シーンを走行している場合に、ドライバは、自動運転の機能により設定される車速より高い車速で走行したい場合がある。特定シーンとして、例えば、自動車専用道の退出路等がある。自動運転の機能により設定される車速より高い車速で走行したい場合、ドライバは、ブレーキ操作等を行うことで自動運転の機能をオフにしなくてはならなかった。
本開示の1つの局面では、必ずしもブレーキ操作を行わなくても、自動運転の機能の少なくとも一部をオフにすることができる車両制御装置を提供することが好ましい。
本開示の1つの局面は、自動運転及び手動運転が可能な車両が備える車両制御装置であって、前記車両が予め設定された特定シーンにいるか否かを判断するように構成された特定シーン判断ユニットと、前記車両のドライバが、アクセル操作を含む特定操作を行ったか否かを判断するように構成された特定操作判断ユニットと、前記車両が前記自動運転を行っているとき、前記車両が前記特定シーンにいると前記特定シーン判断ユニットが判断し、且つ、前記ドライバが前記特定操作を行ったと前記特定操作判断ユニットが判断した場合、前記自動運転の機能の少なくとも一部をオフにする機能オフユニットと、を備える車両制御装置である。
本開示の1つの局面は、自動運転及び手動運転が可能な車両が備える車両制御装置であって、前記車両が予め設定された特定シーンにいるか否かを判断するように構成された特定シーン判断ユニットと、前記車両のドライバが、アクセル操作を含む特定操作を行ったか否かを判断するように構成された特定操作判断ユニットと、前記車両が前記自動運転を行っているとき、前記車両が前記特定シーンにいると前記特定シーン判断ユニットが判断し、且つ、前記ドライバが前記特定操作を行ったと前記特定操作判断ユニットが判断した場合、前記自動運転の機能の少なくとも一部をオフにする機能オフユニットと、を備える車両制御装置である。
本開示の1つの局面である車両制御装置は、必ずしもブレーキ操作を行わなくても、自動運転の機能の少なくとも一部をオフにすることができる。
本開示の例示的な実施形態について図面を参照しながら説明する。
<第1実施形態>
1.車両制御装置1の構成
車両制御装置1の構成を、図1及び図2に基づき説明する。図1に示すように、車両制御装置1は、車両3に搭載される。車両3は、自動運転及び手動運転が可能である。以下では、自動運転をADと呼ぶことがある。また、自動運転の機能がオンの状態にあることをADオンと呼ぶことがある。また、自動運転の機能がオフの状態にあることをADオフと呼ぶことがある。ADオフは、車両3のドライバが手動運転を行う状態である。
<第1実施形態>
1.車両制御装置1の構成
車両制御装置1の構成を、図1及び図2に基づき説明する。図1に示すように、車両制御装置1は、車両3に搭載される。車両3は、自動運転及び手動運転が可能である。以下では、自動運転をADと呼ぶことがある。また、自動運転の機能がオンの状態にあることをADオンと呼ぶことがある。また、自動運転の機能がオフの状態にあることをADオフと呼ぶことがある。ADオフは、車両3のドライバが手動運転を行う状態である。
車両3の状態は、後述するステップ3の処理により、ADオンからADオフに切り替わる。また、車両3の状態は、公知のきっかけにより、ADオフからADオンに切り替わる。
車両制御装置1は、CPU5と、例えば、RAM又はROM等の半導体メモリ(以下、メモリ7とする)と、を有するマイクロコンピュータを備える。
車両制御装置1の各機能は、CPU5が非遷移的実体的記録媒体に格納されたプログラムを実行することにより実現される。この例では、メモリ7が、プログラムを格納した非遷移的実体的記録媒体に該当する。また、このプログラムが実行されることで、プログラムに対応する方法が実行される。なお、車両制御装置1は、1つのマイクロコンピュータを備えてもよいし、複数のマイクロコンピュータを備えてもよい。
車両制御装置1は、図2に示すように、状態判断ユニット9と、特定シーン判断ユニット11と、特定操作判断ユニット13と、機能オフユニット15と、シーン取得ユニット17と、閾値設定ユニット19と、閾値表示ユニット21と、報知ユニット23と、自動運転実行ユニット25と、オーバーライドユニット26と、を備える。
図1に示すように、車両3は、周辺センサ27と、車両センサ29と、車両制御アクチュエータ31と、GPS33と、ADスイッチ35と、情報提示部37と、通信部39と、自動運転用情報DB41と、を備える。車両制御装置1は、これらの構成と接続している。
周辺センサ27は、車両3の周辺に存在する物標を検出する。周辺センサ27は、例えば、カメラ、ライダー等を含む。車両センサ29は、車両3のドライバの運転操作を検出する。運転操作として、アクセル操作、ブレーキ操作、ステアリング操作等がある。車両センサ29は、アクセルの踏み込み量、ブレーキの踏み込み量、及びステアリングの操作量等を検出することができる。
車両制御アクチュエータ31は、車両制御装置1からの指示に応じて、車両3の走行状態を制御する。制御の内容として、加速、減速、操舵等が挙げられる。GPS33は、車両3の位置情報を取得する。
ADスイッチ35は、ドライバが操作可能なスイッチである。ADスイッチ35の操作をきっかけとして、車両3の状態は、ADオンからADオフに切り替わる。また、ADスイッチ35の操作をきっかけとして、車両3の状態は、ADオフからADオンに切り替わる。
情報提示部37は、車両3の車室内に設けられている。情報提示部37は、例えば、ディスプレイ及びスピーカを備える。情報提示部37は、画像又は音声により、ドライバに情報を提示することができる。
通信部39は、車両3の外部の情報センター43と無線通信を行うことができる。通信部39は、例えば、情報センター43から、交通情報、天気情報、及び後述する地図情報等を受信することができる。
自動運転用情報DB41は地図情報等を記憶している。地図情報は、道路プロファイル、道路の車線数、道路の制限速度、交差点の位置、横断歩道の位置等を含む。
2.車両制御装置1が実行する処理
車両制御装置1が所定時間ごとに繰り返し実行する処理を、図3に基づき説明する。図3のステップ1では、現時点においてADオンであるか否かを状態判断ユニット9が判断する。ADオンであると判断した場合、本処理はステップ2に進む。ADオフであると判断した場合、本処理は終了し、ADオフが継続する。
車両制御装置1が所定時間ごとに繰り返し実行する処理を、図3に基づき説明する。図3のステップ1では、現時点においてADオンであるか否かを状態判断ユニット9が判断する。ADオンであると判断した場合、本処理はステップ2に進む。ADオフであると判断した場合、本処理は終了し、ADオフが継続する。
ステップ2では、ドライバによるADオフ操作があったか否かを機能オフユニット15が判断する。ADオフ操作として、例えば、ADスイッチ35の操作、ブレーキ操作、ステアリング操作等がある。機能オフユニット15は、車両センサ29を用いて、ブレーキ操作、及びステアリング操作を検出できる。ADオフ操作があった場合、本処理はステップ3に進む。ADオフ操作がなかった場合、本処理はステップ4に進む。
ステップ3では、機能オフユニット15が、車両3の状態を、ADオンからADオフに切り替える。
ステップ4では、ドライバがアクセル操作を行ったか否かを、特定操作判断ユニット13が判断する。特定操作判断ユニット13は、車両センサ29を用いて、アクセル操作を検出できる。ドライバがアクセル操作を行った場合、本処理はステップ5に進む。ドライバがアクセル操作を行わなかった場合、本処理は終了し、ADオンが継続する。なお、ADオンが継続する場合、自動運転実行ユニット25が、周辺センサ27、車両制御アクチュエータ31、GPS33、自動運転用情報DB41等を用い、公知の方法で自動運転を行う。
ステップ5では、まず、シーン取得ユニット17が、現時点において車両3が存在するシーン(以下では現時点のシーンとする)を取得する。シーンとは場所である。シーン取得ユニット17は、例えば、GPS33を用いて取得した車両3の位置情報と、自動運転用情報DB41に記憶された地図情報とを照合することで、現時点のシーンを取得する。
あるいは、シーン取得ユニット17は、例えば、周辺センサ27を用いて、車両3の周囲に存在するランドマークを検出する。ランドマークとして、例えば、建築物、地形等が挙げられる。次に、シーン取得ユニット17は、検出したランドマークに対する車両3の相対的な位置情報を取得する。次に、シーン取得ユニット17は、地図情報から、検出したランドマークの絶対的な位置情報を取得する。次に、シーン取得ユニット17は、検出したランドマークに対する車両3の相対的な位置情報と、検出したランドマークの絶対的な位置情報とから、現時点のシーンを取得する。
次に、現時点のシーンが、予め設定された特定シーンであるか否かを、特定シーン判断ユニット11が判断する。特定シーンは、例えば、ADオフとすることにより、自動運転の機能により設定される車速より高い車速で走行したいとドライバが望むことが多いシーンである。特定シーンは、例えば、自動運転の機能により設定される車速が、他のシーンに比べて低いシーンである。特定シーンとして、例えば、合流路のシーン、退出路のシーン、ランプのシーン、ETC(登録商標)ゲートの直前のシーン、ETCゲートの直後のシーン、カーブの手前のシーン等が挙げられる。
現時点のシーンが特定シーンである場合、本処理はステップ6に進む。現時点のシーンが特定シーンではない場合、本処理はステップ13に進む。
ステップ6では、前記ステップ5で取得した現時点のシーンが、アクセル閾値を変更する必要があるシーン(以下では閾値変更シーンとする)であるか否かを閾値設定ユニット19が判断する。閾値変更シーンは予め設定されている。閾値変更シーンは、例えば、安全走行のために適切な車速が他のシーンとは異なるシーンである。閾値変更シーンとして、例えば、小曲率のカーブのシーン、ETCの付近のシーン等が挙げられる。アクセル閾値は、後述するステップ10の判断で使用される閾値である。
現時点のシーンが閾値変更シーンである場合、本処理はステップ7に進む。現時点のシーンが閾値変更シーンではない場合、本処理はステップ8に進む。
ステップ7では、閾値設定ユニット19が、アクセル閾値として、特別のアクセル閾値を設定する。特別のアクセル閾値は、正の値であって、後述する通常のアクセル閾値より小さい。
ステップ8では、閾値設定ユニット19が、アクセル閾値として、通常のアクセル閾値を設定する。通常のアクセル閾値は、正の値であって、特別のアクセル閾値より大きい。なお、ステップ6~8の処理は、車両3が走行しているシーンに応じてアクセル閾値を設定することに対応する。
ステップ9では、閾値表示ユニット21が、情報提示部37を用いて、前記ステップ7又は前記ステップ8で設定したアクセル閾値を表示する。
ステップ10では、アクセルの踏み込み量が、前記ステップ7又は前記ステップ8で設定したアクセル閾値以上であるか否かを特定操作判断ユニット13が判断する。アクセルの踏み込み量がアクセル閾値以上である場合、本処理はステップ11に進む。アクセルの踏み込み量がアクセル閾値未満である場合、本処理はステップ13に進む。
ステップ11では、アクセル操作が所定時間以上継続しているか否かを特定操作判断ユニット13が判断する。アクセル操作が所定時間以上継続している場合、本処理はステップ12に進む。アクセル操作が所定時間以上継続していない場合、本処理はステップ13に進む。
ステップ12では、報知ユニット23が、情報提示部37を用いて、この後にADオフとなることを報知する。ステップ12の後、ステップ3に進む。
ステップ13では、オーバーライドユニット26がアクセルオーバーライドを行う。アクセルオーバーライドとは、ADオンのままで、アクセル開度を、ドライバによるアクセル操作に対応した値にする処理である。
3.車両制御装置1が奏する効果
(1A)車両制御装置1は、前記ステップ5において、車両3が特定シーンにいるか否かを判断する。また、車両制御装置1は、前記ステップ4、10、11において、アクセルの踏み込み量がアクセル閾値を超え、所定時間以上継続するアクセル操作をドライバが行ったか否かを判断する。車両制御装置1は、ADオンのとき、車両3が特定シーンにいると判断し、且つ、アクセルの踏み込み量がアクセル閾値を超え、所定時間以上継続するアクセル操作をドライバが行ったと判断した場合、車両3の状態をADオフに切り替える。
(1A)車両制御装置1は、前記ステップ5において、車両3が特定シーンにいるか否かを判断する。また、車両制御装置1は、前記ステップ4、10、11において、アクセルの踏み込み量がアクセル閾値を超え、所定時間以上継続するアクセル操作をドライバが行ったか否かを判断する。車両制御装置1は、ADオンのとき、車両3が特定シーンにいると判断し、且つ、アクセルの踏み込み量がアクセル閾値を超え、所定時間以上継続するアクセル操作をドライバが行ったと判断した場合、車両3の状態をADオフに切り替える。
よって、車両制御装置1は、必ずしもドライバがブレーキ操作を行わなくても、車両3の状態をADオフに切り替えることができる。なお、アクセルの踏み込み量がアクセル閾値を超え、所定時間以上継続するアクセル操作は特定操作に対応する。
(1B)特定操作は、アクセルの踏み込み量がアクセル閾値を超えるアクセル操作を含む操作である。そのため、車両制御装置1は、ADオフになることをドライバが望まない場合にADオフになってしまうことを抑制できる。
(1C)車両制御装置1は、前記ステップ6~8の処理により、車両3が走行しているシーンに応じてアクセル閾値を適切に設定することができる。
(1D)車両制御装置1は、アクセル閾値を表示することができる。そのため、ドライバは、どの程度アクセル操作をすればADオフになるかを容易に理解できる。
(1E)特定操作は、所定時間以上継続するアクセル操作を含む操作である。そのため、車両制御装置1は、ADオフになることをドライバが望まない場合にADオフになってしまうことを抑制できる。
(1F)特定シーンは、合流路のシーン及び退出路のシーンを含む。合流路のシーン及び退出路のシーンは、車両3の状態をADオフに切り替えることをドライバが望むことが多いシーンである。車両制御装置1は、合流路のシーン及び退出路のシーンにおいて、車両3の状態をADオフに切り替えることができる。
(1G)車両制御装置1は、ADオフとなる前に報知を行う。そのことにより、ドライバは、車両3の将来の状態を容易に理解することができる。
<第2実施形態>
1.第1実施形態との相違点
第2実施形態は、基本的な構成は第1実施形態と同様であるため、相違点について以下に説明する。なお、第1実施形態と同じ符号は、同一の構成を示すものであって、先行する説明を参照する。
<第2実施形態>
1.第1実施形態との相違点
第2実施形態は、基本的な構成は第1実施形態と同様であるため、相違点について以下に説明する。なお、第1実施形態と同じ符号は、同一の構成を示すものであって、先行する説明を参照する。
前述した第1実施形態では、特定操作は、アクセルの踏み込み量がアクセル閾値を超え、所定時間以上継続するアクセル操作であった。これに対し、第2実施形態では、特定操作は、第1実施形態における特定操作に加えて、ステアリング操作を含む点で、第1実施形態と相違する。すなわち、第2実施形態における特定操作は、アクセル操作と、ステアリング操作との両方を行う操作である。
2.車両制御装置1が奏する効果
以上詳述した第2実施形態によれば、前述した第1実施形態の効果を奏し、さらに、以下の効果を奏する。
以上詳述した第2実施形態によれば、前述した第1実施形態の効果を奏し、さらに、以下の効果を奏する。
(2A)上述したように、第2実施形態において、特定操作は、アクセル操作と、ステアリング操作との両方を行う操作である。特定シーンは、カーブの手前のシーンを含む。よって、車両制御装置1は、カーブの手前のシーンにおいて、アクセル操作と、ステアリング操作との両方が行われた場合に車両3の状態をADオフに切り替える。そのため、カーブの手前のシーンにおいてアクセル操作のみが行われた場合はADオフにならないので、車両3の安全性が一層向上する。
<第3実施形態>
1.第1実施形態との相違点
第3実施形態は、基本的な構成は第1実施形態と同様であるため、相違点について以下に説明する。なお、第1実施形態と同じ符号は、同一の構成を示すものであって、先行する説明を参照する。
<第3実施形態>
1.第1実施形態との相違点
第3実施形態は、基本的な構成は第1実施形態と同様であるため、相違点について以下に説明する。なお、第1実施形態と同じ符号は、同一の構成を示すものであって、先行する説明を参照する。
前述した第1実施形態では、前記ステップ11で肯定判断した場合、前記ステップ3において、自動運転の機能を全てオフにした。これに対し、第3実施形態では、前記ステップ11で肯定判断した場合、前記ステップ3において、自動運転の機能を基本的にはオフにするが、横制御の機能は所定時間継続させる。横制御とは、操舵の制御である。なお、前記ステップ2で肯定判断した場合は、例えば、自動運転の機能を全てオフにする。
2.車両制御装置1が奏する効果
以上詳述した第3実施形態によれば、前述した第1実施形態の効果を奏し、さらに、以下の効果を奏する。
以上詳述した第3実施形態によれば、前述した第1実施形態の効果を奏し、さらに、以下の効果を奏する。
(3A)特定シーンにおいてドライバが特定操作を行った場合、車両制御装置1は、横制御の機能を所定時間継続させる。そのことにより、車両3の安全性が一層向上する。特に、合流路のシーンや退出路のシーンで車両3がレーンチェンジを行っているときに特定操作が行われた場合、横制御の機能を所定時間継続させることで、車両3の安全性が一層向上する。
<他の実施形態>
以上、本開示の実施形態について説明したが、本開示は上述の実施形態に限定されることなく、種々変形して実施することができる。
<他の実施形態>
以上、本開示の実施形態について説明したが、本開示は上述の実施形態に限定されることなく、種々変形して実施することができる。
(1)特定操作は、アクセル操作と、他の運転操作との組み合わせであってもよい。他の運転操作は、ステアリング操作以外の運転操作であってもよい。
(2)アクセル閾値は常に一定であってもよい。
(3)本開示に記載の車両制御装置1及びその手法は、コンピュータプログラムにより具体化された一つ乃至は複数の機能を実行するようにプログラムされたプロセッサ及びメモリを構成することによって提供された専用コンピュータにより、実現されてもよい。あるいは、本開示に記載の車両制御装置1及びその手法は、一つ以上の専用ハードウェア論理回路によってプロセッサを構成することによって提供された専用コンピュータにより、実現されてもよい。もしくは、本開示に記載の車両制御装置1及びその手法は、一つ乃至は複数の機能を実行するようにプログラムされたプロセッサ及びメモリと一つ以上のハードウェア論理回路によって構成されたプロセッサとの組み合わせにより構成された一つ以上の専用コンピュータにより、実現されてもよい。また、コンピュータプログラムは、コンピュータにより実行されるインストラクションとして、コンピュータ読み取り可能な非遷移有形記録媒体に記憶されてもよい。車両制御装置1に含まれる各部の機能を実現する手法には、必ずしもソフトウェアが含まれている必要はなく、その全部の機能が、一つあるいは複数のハードウェアを用いて実現されてもよい。
(4)上記実施形態における1つの構成要素が有する複数の機能を、複数の構成要素によって実現したり、1つの構成要素が有する1つの機能を、複数の構成要素によって実現したりしてもよい。また、複数の構成要素が有する複数の機能を、1つの構成要素によって実現したり、複数の構成要素によって実現される1つの機能を、1つの構成要素によって実現したりしてもよい。また、上記実施形態の構成の一部を省略してもよい。また、上記実施形態の構成の少なくとも一部を、他の上記実施形態の構成に対して付加又は置換してもよい。
(5)上述した車両制御装置1の他、当該車両制御装置1を構成要素とするシステム、当該車両制御装置1としてコンピュータを機能させるためのプログラム、このプログラムを記録した半導体メモリ等の非遷移的実態的記録媒体、車両制御方法等、種々の形態で本開示を実現することもできる。
Claims (10)
- 自動運転及び手動運転が可能な車両(3)が備える車両制御装置(1)であって、
前記車両が予め設定された特定シーンにいるか否かを判断するように構成された特定シーン判断ユニット(11)と、
前記車両のドライバが、アクセル操作を含む特定操作を行ったか否かを判断するように構成された特定操作判断ユニット(13)と、
前記車両が前記自動運転を行っているとき、前記車両が前記特定シーンにいると前記特定シーン判断ユニットが判断し、且つ、前記ドライバが前記特定操作を行ったと前記特定操作判断ユニットが判断した場合、前記自動運転の機能の少なくとも一部をオフにする機能オフユニット(15)と、
を備える車両制御装置。 - 請求項1に記載の車両制御装置であって、
前記特定操作は、アクセルの踏み込み量が予め設定されたアクセル閾値を超えるアクセル操作を含む操作である車両制御装置。 - 請求項2に記載の車両制御装置であって、
前記車両が走行しているシーンに応じて前記アクセル閾値を設定するように構成された閾値設定ユニット(19)をさらに備える車両制御装置。 - 請求項2又は3に記載の車両制御装置であって、
前記アクセル閾値を表示するように構成された閾値表示ユニット(21)をさらに備える車両制御装置。 - 請求項1~4のいずれか1項に記載の車両制御装置であって、
前記特定操作は、アクセル操作と、ステアリング操作との両方を行う操作である車両制御装置。 - 請求項5に記載の車両制御装置であって、
前記特定シーンは、カーブの手前のシーンを含む車両制御装置。 - 請求項1~6のいずれか1項に記載の車両制御装置であって、
前記特定操作は、所定時間以上継続するアクセル操作を含む操作である車両制御装置。 - 請求項1~7のいずれか1項に記載の車両制御装置であって、
前記特定シーンは、合流路のシーン又は退出路のシーンを含む車両制御装置。 - 請求項1~8のいずれか1項に記載の車両制御装置であって、
前記機能オフユニットが前記自動運転の機能の少なくとも一部をオフにする前に報知を行うように構成された報知ユニット(23)をさらに備える車両制御装置。 - 請求項1~9のいずれか1項に記載の車両制御装置であって、
前記機能オフユニットは、前記自動運転の機能の少なくとも一部をオフにした後、前記自動運転の横制御を所定時間継続させるように構成された車両制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/529,379 US20220073109A1 (en) | 2019-05-21 | 2021-11-18 | Vehicle control unit |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019095249A JP2020190870A (ja) | 2019-05-21 | 2019-05-21 | 車両制御装置 |
| JP2019-095249 | 2019-05-21 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/529,379 Continuation US20220073109A1 (en) | 2019-05-21 | 2021-11-18 | Vehicle control unit |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020235393A1 true WO2020235393A1 (ja) | 2020-11-26 |
Family
ID=73454642
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/018969 WO2020235393A1 (ja) | 2019-05-21 | 2020-05-12 | 車両制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20220073109A1 (ja) |
| JP (1) | JP2020190870A (ja) |
| WO (1) | WO2020235393A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012162221A (ja) * | 2011-02-09 | 2012-08-30 | Honda Motor Co Ltd | 自動制動装置 |
| JP2016175613A (ja) * | 2015-03-23 | 2016-10-06 | トヨタ自動車株式会社 | 自動運転装置 |
| JP2017146933A (ja) * | 2016-02-19 | 2017-08-24 | 住友電気工業株式会社 | 情報処理装置、車載装置、記憶媒体及びコンピュータプログラム |
| JP2017197053A (ja) * | 2016-04-28 | 2017-11-02 | トヨタ自動車株式会社 | 自動運転制御装置 |
| JP2018088060A (ja) * | 2016-11-28 | 2018-06-07 | トヨタ自動車株式会社 | 自動運転装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5163346B2 (ja) * | 2008-07-31 | 2013-03-13 | 日産自動車株式会社 | 車両の制駆動制御装置及び自動運転制御方法 |
| US9744854B2 (en) * | 2013-12-18 | 2017-08-29 | Honda Motor Co., Ltd. | Operation amount display apparatus |
| JP6176264B2 (ja) * | 2015-01-19 | 2017-08-09 | トヨタ自動車株式会社 | 自動運転車両システム |
| JP6375237B2 (ja) * | 2015-01-28 | 2018-08-15 | 日立オートモティブシステムズ株式会社 | 自動運転制御装置 |
| JP6627332B2 (ja) * | 2015-08-31 | 2020-01-08 | いすゞ自動車株式会社 | 運転支援装置および運転支援方法 |
| JP6464107B2 (ja) * | 2016-02-22 | 2019-02-06 | 本田技研工業株式会社 | 走行支援装置 |
| JP6358478B2 (ja) * | 2016-03-31 | 2018-07-18 | マツダ株式会社 | 車両用効果音発生装置 |
| KR101911293B1 (ko) * | 2016-05-12 | 2018-10-24 | 엘지전자 주식회사 | 차량용 제어장치 |
| US11273826B2 (en) * | 2017-01-23 | 2022-03-15 | Honda Motor Co., Ltd. | Vehicle control system, vehicle control method, and storage medium |
| JP7205773B2 (ja) * | 2019-03-27 | 2023-01-17 | スズキ株式会社 | 車両の走行制御装置 |
-
2019
- 2019-05-21 JP JP2019095249A patent/JP2020190870A/ja active Pending
-
2020
- 2020-05-12 WO PCT/JP2020/018969 patent/WO2020235393A1/ja active Application Filing
-
2021
- 2021-11-18 US US17/529,379 patent/US20220073109A1/en not_active Abandoned
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012162221A (ja) * | 2011-02-09 | 2012-08-30 | Honda Motor Co Ltd | 自動制動装置 |
| JP2016175613A (ja) * | 2015-03-23 | 2016-10-06 | トヨタ自動車株式会社 | 自動運転装置 |
| JP2017146933A (ja) * | 2016-02-19 | 2017-08-24 | 住友電気工業株式会社 | 情報処理装置、車載装置、記憶媒体及びコンピュータプログラム |
| JP2017197053A (ja) * | 2016-04-28 | 2017-11-02 | トヨタ自動車株式会社 | 自動運転制御装置 |
| JP2018088060A (ja) * | 2016-11-28 | 2018-06-07 | トヨタ自動車株式会社 | 自動運転装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220073109A1 (en) | 2022-03-10 |
| JP2020190870A (ja) | 2020-11-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6986780B2 (ja) | 自動運転制御装置及び車両 | |
| CN107567406B (zh) | 基于操作者超控的自动化车辆参数修改 | |
| CN109421713B (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| JP7119653B2 (ja) | 車両制御装置 | |
| US20200241526A1 (en) | Method and device for remote-controlling autonomous vehicle capable of changing driving mode between autonomous driving mode and manual driving mode | |
| JP6614354B2 (ja) | 走行制御方法及び走行制御装置 | |
| JP6801116B2 (ja) | 走行制御装置、車両および走行制御方法 | |
| WO2015186648A1 (ja) | 車両の走行制御装置 | |
| US10452932B2 (en) | Information processing device | |
| CN109664883B (zh) | 车辆控制装置 | |
| CN112977416B (zh) | 驻车辅助系统及其控制方法 | |
| JP7365872B2 (ja) | 車線変更支援方法及び車線変更支援装置 | |
| WO2020235393A1 (ja) | 車両制御装置 | |
| JP7029689B2 (ja) | 表示制御方法およびそれを利用した表示制御装置、車両、プログラム、表示制御システム | |
| JP7256867B2 (ja) | 制御装置、制御方法及びプログラム | |
| JP7303521B2 (ja) | 車両制御装置 | |
| JP2003026025A (ja) | 自動操舵装置 | |
| JP7252320B2 (ja) | 制御装置、制御方法及びプログラム | |
| WO2022230779A1 (ja) | 車両用報知制御装置及び車両用報知制御方法 | |
| JP7043982B2 (ja) | 車両制御装置 | |
| US20200223436A1 (en) | Vehicle and control device for the same | |
| JP2022169453A (ja) | 車両用報知制御装置及び車両用報知制御方法 | |
| JP2024092258A (ja) | 車両制御システム、車両制御方法、およびプログラム | |
| JP2024036706A (ja) | 制御装置、制御方法およびコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20809276 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20809276 Country of ref document: EP Kind code of ref document: A1 |