WO2014162860A1 - 車両の停車制御装置 - Google Patents
車両の停車制御装置 Download PDFInfo
- Publication number
- WO2014162860A1 WO2014162860A1 PCT/JP2014/057194 JP2014057194W WO2014162860A1 WO 2014162860 A1 WO2014162860 A1 WO 2014162860A1 JP 2014057194 W JP2014057194 W JP 2014057194W WO 2014162860 A1 WO2014162860 A1 WO 2014162860A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- steering
- control unit
- toe
- wheels
- Prior art date
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D17/00—Means on vehicles for adjusting camber, castor, or toe-in
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T1/00—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles
- B60T1/12—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting otherwise than by retarding wheels, e.g. jet action
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/002—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D7/00—Steering linkage; Stub axles or their mountings
- B62D7/06—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins
- B62D7/14—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering
- B62D7/15—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering characterised by means varying the ratio between the steering angles of the steered wheels
- B62D7/1509—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering characterised by means varying the ratio between the steering angles of the steered wheels with different steering modes, e.g. crab-steering, or steering specially adapted for reversing of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D9/00—Steering deflectable wheels not otherwise provided for
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D63/00—Brakes not otherwise provided for; Brakes combining more than one of the types of groups F16D49/00 - F16D61/00
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/06—Hill holder; Start aid systems on inclined road
Definitions
- the present invention relates to a vehicle stop control device that prevents a vehicle in which all wheels can be steered independently and each drive wheel can be independently driven to travel undesirably.
- a parking brake is used to prevent the vehicle from moving backward.
- a technique has been proposed in which an appropriate braking force is applied to the vehicle by a control device in accordance with the state of the vehicle (for example, the slope of a downhill road). For example, the inclination angle of a downhill road is judged using a tilt angle sensor, map data, an image taken by an in-vehicle camera, or a detection result by a sensor device such as a millimeter wave radar device, and a toe angle in a toe-in direction or a toe-out direction
- Patent Document 1 A technique for applying braking to a wheel to brake a vehicle has been proposed (Patent Document 1).
- the mechanism is complicated because control is performed using GPS information, a G sensor, a millimeter wave radar device, a vehicle-mounted camera, and the like.
- An object of the present invention is to provide a vehicle stop control device capable of improving the operability and simplifying the structure and reducing the manufacturing cost when the vehicle is hill-held in a vehicle capable of independently turning all wheels. Is to provide.
- the vehicle of this embodiment is an electric vehicle, and is provided with two left and right wheels 1 and 1 that are front wheels and two right and left wheels 2 and 2 that are rear wheels. All the wheels 1 and 2 are provided with a steering device 4 that can be independently steered. Each of the wheels 1 and 2 is a drive wheel in the illustrated example, and is independently driven by a travel drive mechanism 5 including a drive source 6.
- the travel drive mechanism 5 is an in-wheel motor drive device in this example, and the wheel bearing 7 that supports the wheels 1 and 2 respectively, the electric motor 6 that is a drive source, and the wheel that decelerates the rotation output by the electric motor 6. And a speed reducer 8 that transmits the rotation-side bearing ring (not shown) of the bearing 7 for use.
- the wheel bearing 7, the electric motor 6, and the speed reducer 8 are installed in a common housing or coupled together to be integrated.
- the integrated travel drive mechanism 5 is installed in the vehicle body 3 so as to be rotatable around a vertical support shaft 9 via a suspension (not shown).
- the electric motor 6 includes a rotation angle sensor 10 that outputs a rotation angle signal of the motor rotor (not shown), and an inverter device described later obtains the rotation angle signal from the rotation angle sensor 10 and performs rotation angle such as vector control. Control according to.
- the steering device 4 includes a steering drive source 4a made of an electric motor or the like, and a transmission mechanism 4b that transmits the rotation of the steering drive source 4a to the travel drive mechanism 5.
- the transmission mechanism 4b is composed of a gear train, for example.
- the steered device 4 in this example is a steer-by-wire system that is not mechanically connected to the joystick 21 as a steering input means.
- the transmission mechanism 4b may be a combination of a gear and rotation / linear motion conversion means such as a ball screw or a rack / pinion mechanism.
- the electric vehicle includes a steering device 4 in which all the wheels 1 and 2 can be independently steered, and a configuration in which all the driving wheels 1 and 2 can be independently driven in FIG. 3A. It is possible to move in the normal traveling mode shown and the non-normal traveling mode which is the in-situ rotation mode or the lateral movement mode shown in FIGS. 3B and 3C, respectively.
- the normal traveling mode in FIG. 3A is a normal straight traveling or traveling in an arcuate curved direction, and is a traveling mode other than the non-normal traveling mode which is an in-situ rotation mode and a lateral movement mode described later. In the normal travel mode, the left and right wheels 1, 1, 2 and 2 are steered in the same direction.
- the in-situ rotation mode of FIG. 3B is a moving form in which the vehicle body 3 is rotated on the spot (rotation radius is substantially zero) with the approximate center of the vehicle body 3 being rotated.
- the in-situ rotation mode is such that the wheels 1 and 2 are directed along a common virtual circumference C, that is, in a tangential direction, and the wheels 1 and 2 are directed from the center O side of the circumference.
- it is a moving form in which they are rotationally driven in the same direction as indicated by arrows. Accordingly, the left and right wheels 1, 1, 2, 2 are steered in the opposite directions from the straight traveling direction.
- the in-situ rotation mode can be rotated in either the left or right direction by switching the rotation direction of the wheels 1 and 2 between forward and reverse.
- the lateral movement mode in FIG. 3C is a movement form in which the vehicle body 3 is moved in a direction just beside or close to the beside.
- the lateral movement mode is a mode in which the wheels 1 and 2 are turned sideways with respect to the vehicle body 3 and the wheels 1 and 2 serving as driving wheels are rotated so as to roll in the same lateral direction.
- the change from the straight traveling state to the lateral movement mode in the normal traveling mode depends on the configuration of the steering device 4, but in this example, the front wheel 1 is not simply increased, but the front wheel 1 in FIG.
- the left and right wheels 1 and 1 are turned in opposite directions so as to be symmetrical with each other, so that the wheels 1 and 1 are turned to the side.
- the left and right wheels 1, 1, 2, and 2 are opposite to each other when the wheels 1 and 2 that are the driving wheels are rotated so as to roll in the same lateral direction. Will be driven to rotate.
- a seat serving as a driver's seat 11 and a passenger seat 12 is provided in a passenger compartment 3a of the vehicle body 3.
- a joystick 21 serving as a steering input means and an accelerator operating means, and a brake operator 22 are provided.
- the brake operator 22 includes, for example, a brake pedal and is provided on the floor portion in front of the driver's seat 11.
- the joystick 21 is a general term for a steering input means that can input a steering angle of a wheel, for example, both a direction and an operation amount, with a single operator touched by a driver.
- a lever-type joystick shown in FIG. 21 is adopted.
- the joystick 21 can be tilted in any direction of 360 ° around the entire circumference from the upright state where the lever 21a as an operator is in a neutral position, and the accelerator operation and the steering operation are performed for each of the following modes.
- the direction of the fall is different.
- ⁇ Normal driving mode Joystick front-rear direction Equivalent to the amount of accelerator operation for forward or reverse electric vehicles.
- the operation amount is proportional to the tilt angle. Equivalent to the steering amount of the steering wheel lateral direction ⁇ steering wheel.
- the steering amount is proportional to the tilt angle.
- the forward torque is the maximum (for example, the torque for the wheel of all four wheels is 400 Nm)
- the turning angle is also maximum (for example, 60 °).
- the operation amount is proportional to the tilt angle.
- the torque that the vehicle turns clockwise is the maximum (for example, the torque at the wheel of all four wheels is 400 Nm).
- the travel mode switching means 41 for switching each travel mode described with reference to FIG. 3 by the operation of the driver (see also FIG. 4).
- the travel mode switching means 41 includes a plurality of input operation means 42 to 45 and a mode switching control unit 34 provided in the ECU 31.
- the first input operation means 42 is a means for setting a switching preparation mode in which the operation mode can be switched between the normal travel operation mode and the non-normal travel operation mode. For example, it consists of operation buttons provided on the front surface of the joystick 21.
- the second to fourth input operation means 43 to 45 are means for selecting an in-situ rotation mode, a lateral movement mode, and a normal travel mode, respectively, all of which are provided on the upper surface of the upper end of the joystick 21. It consists of buttons.
- the installation location of at least one of the input operation means 42 to 45 is not limited to the joystick 21 and may be provided on the surface of the dashboard 24, for example.
- the stop control device for the vehicle includes the steering device 4 Controls the steering operation.
- the ECU 31 and a plurality of inverter devices 39 are provided as control means for controlling the steering device 4 and the travel drive mechanism 5.
- the inverter device 39 is a device that drives the electric motor 6 that is an electric motor of the traveling drive mechanism 5 of each wheel, and includes a power circuit unit such as an inverter that converts DC power of the battery Bt (FIG. 5) into AC power, And a control circuit unit that controls the power circuit unit in accordance with a command from the ECU 31.
- the ECU 31 is an electric control unit that performs overall control and cooperative control of the entire vehicle, and includes a microcomputer and an electronic circuit.
- the ECU 31 is an integrated control unit that controls the steering device 4 and the travel drive mechanism 5.
- the ECU 31 may be composed of a plurality of ECUs classified by function, and here, the ECU 31 will be described as a group of these ECUs.
- the ECU 31 is provided with a steering control unit 32, a drive control unit 33, and a mode switching control unit 34.
- the steering control means 32 includes a normal-time steering control unit 32a and a stationary-time steering control unit 32b.
- the normal-time steering control unit 32a outputs a steering amount command value determined with respect to the steering amount signal input from the joystick 21 serving as the steering input means to the steering drive source 4a of each steering device 4.
- the “steering amount signal” means a signal indicating the steering direction and the amount of steering.
- the “steering amount command value” means a command value that is the magnitude of the driving direction (steering direction) of the steering drive source 4a and the steering driving amount (the steering amount).
- the determined steering amount command value may be arbitrarily determined. However, in principle, when the steering amount signal is increased, the steering amount command value is also increased. It is determined as appropriate.
- the turning device 4 for one or more wheels 1 and 2 is toe-in larger than the turning amount command value of the normal-time turning control unit 32a. Turn the vehicle to the toe-out side to hill hold the vehicle. Examples of wheels to be steered will be described later.
- the stop-time steering control unit 32b detects the vehicle speed from the rotation angle signal output from the rotation angle sensor 10 as the predetermined condition, the detected vehicle speed is equal to or less than a threshold value, and the accelerator input value is It is determined whether or not the condition below the threshold is satisfied.
- the input value of the accelerator means the amount of tilt of the joystick 21 from the neutral position of the lever 21a, that is, the tilt angle of the joystick 21 in the front-rear direction.
- the vehicle stop control device includes at least a normal-time steering control unit 32a and a stop-time steering control unit 32b.
- the drive control means 33 is a means for outputting a drive command such as a torque command to the inverter device 39 of the electric motor 6 of each of the wheels 1 and 2 in accordance with the accelerator operation amount signal input by the joystick 21.
- the accelerator operation amount signal includes an acceleration command, a deceleration command, and a speed maintenance command.
- the mode switching control unit 34 is means for switching the driving mode between the normal driving mode and the non-normal driving mode by a mode switching signal.
- the mode switching control unit 34 has a normal traveling operation mode control unit 35 and a non-normal operation mode control unit that cause the steered control unit 32 and the drive control unit 33 to function in addition to the switching function. 36.
- the mode switching control unit 34 and the mode switching input operation means 42 to 45 constitute the traveling mode switching means 41.
- the normal traveling operation mode control unit 35 causes the steering control unit 32 and the drive control unit 33 to perform normal operation based on a steering input (that is, the steering amount) and the accelerator operation amount signal from the joystick 21 that is the steering and accelerator operation unit. That is, it is a means for functioning so as to achieve a predetermined basic operation.
- This basic operation is performed by causing the normal-time steering control unit 32a in the steering control means 32 to issue a command to steer in the input direction in accordance with the input of the steering direction (that is, in accordance with the steering amount).
- This is an operation for causing the drive control means 33 to execute a drive command corresponding to the accelerator operation amount.
- the stop-time turning control unit 32b in the turning control means 32 determines that the predetermined condition is satisfied, the stop-time turning control unit 32b has one or more wheels 1. , 2 is steered to the toe-in or toe-out side larger than the steering amount command value of the normal-time steering control unit 32a to hill-hold the vehicle.
- the non-normal operation mode control unit 36 controls the steered control means 32 and the drive control means 33 so that the in-situ rotation mode described above with reference to FIG. Even in the spot rotation mode, if the stop-time steering control unit 32b determines that the predetermined condition is satisfied, the hill hold control by the stop-time steering control unit 32b is executed. This is because if the center of rotation and the position of the center of gravity are different, the vehicle does not move forward and backward undesirably, but the vehicle may rotate.
- each mode control unit 35, 36 in the mode switching control unit 34 determines whether or not to perform hill hold control, but is not limited to this example.
- the stop-time steering control unit 32b may determine whether or not to perform hill hold control in each travel mode. In this case, for example, the stop-time steering control unit 32b may not perform the hill hold control only in the spot rotation mode.
- the non-normal operation mode control unit 36 controls the steering control means 32 and the drive control means 33 so as to be in the lateral movement mode described above with reference to FIG. 3C in the lateral movement mode. However, even in the lateral movement mode, when the stop-time steering control unit 32b determines that the predetermined condition is satisfied, the stop-time steering control unit 32b executes hill hold control. In the joystick 21, even if the steering direction input and the accelerator input are the same, the normal driving operation mode control unit 35 and the non-normal operation mode control unit 36 intervene, so that the steering control unit 32 and the drive control unit are provided. 33 performs a different operation.
- FIG. 5 is an explanatory diagram showing the normal state in which the hill hold control is not performed in a plan view. This will be described with reference to FIG.
- the travel mode is the normal travel mode, and the same is true for the following explanatory diagrams.
- the normal traveling operation mode control unit 35 causes the normal-time steering control unit 32a in the steering control means 32 to issue a command to steer the wheels 1 and 2 in the input direction according to the steering input from the joystick 21. ing.
- FIG. 6 is an explanatory diagram showing, in plan view, a state in which, for example, hill hold control for turning only the right front wheel 1 is executed in the stop control device for the vehicle. This will be described with reference to FIG.
- the stop-time turning control unit 32b determines that the predetermined condition is satisfied, the stop-time turning control unit 32b turns only the turning device 4 of the right front wheel 1 into the normal-time turning control unit 32a.
- the hill hold control is executed to steer to the toe-in side larger than the amount command value.
- the turning angle ⁇ of the right front wheel 1 at the time of the hill hold control is, for example, a toe angle of 30 degrees or more and 75 degrees or less with respect to the front-rear direction of the vehicle body 3,
- the vehicle can be hill-held by friction with the road surface.
- FIG. 7 is a flowchart of the control operation of the stop-time steering control unit in the vehicle stop control device. This will be described with reference to FIG.
- the stop control device starts this processing in the normal travel mode, the lateral movement mode, or the spot rotation mode.
- the stop-time steering control unit 32b detects the vehicle speed V from the rotation angle signal output from the rotation angle sensor 10, and the detected vehicle speed V is equal to or less than a threshold value V THR1 (
- step s1 YES
- hill hold control also referred to as stop control
- step s3 the hill hold control is turned off. Thereafter, this process is terminated.
- the normal-time steering control unit 32a outputs a steering amount command value to the steering device 4 in response to the steering amount signal input from the joystick 21. .
- the stop-time steering control unit 32b detects the vehicle speed from the rotation angle signal output from the rotation angle sensor 10 of the electric motor 6, and this When the detected vehicle speed is equal to or lower than the threshold value and the input value of the accelerator is equal to or lower than the threshold value, the steering device 4 for the wheels 1 and 2 is Turn to the toe-out side.
- the vehicle can be prevented from undesirably moving backward or forward by the frictional force between the steered wheels 1 and 2 and the road surface.
- the structure can be simplified and the manufacturing cost can be reduced as compared with the prior art.
- the hill hold can be performed without requiring any operation by the driver, the vehicle can be hill held without depending on the operation and skill of the driver, and the operability can be improved.
- the stop-time steering control unit 32 b sets the steering devices 4 for all the wheels 1 and 2 to the toe-in or toe-out side larger than the steering amount command value (in the example of FIG. 8). It is good also as what steers to the toe-in side. In this case, the friction force between all the wheels 1 and 2 and the road surface can be increased, and the vehicle can be reliably hill-held.
- the stop-time steering control unit 32b (FIG. 2) controls the front wheels 1 and 1 so that only the front wheels 1 and 1 are steered to the toe-in or toe-out side (the toe-in side in the example of FIG. 9).
- the steering devices 4 and 4 may be steered. In this case, the vehicle can be reliably hill-held by increasing the frictional force between the wheels and the road surface rather than turning only one of the front wheels 1 and 1.
- FIG. 10 is an explanatory diagram showing a normal state when turning without performing hill hold control in a plan view
- FIG. 11 is a vehicle stop control device according to still another embodiment of the present invention
- FIG. 3 is an explanatory diagram showing in plan view a state in which hill hold control is performed in which only the right front wheel 1 is toe-in during turning.
- the turning-time turning control unit 32b (FIG. 2) is determined for the steering amount signal.
- the steered device 4 of the right front wheel 1 is steered to the toe-in side even greater than the steered amount command value.
- the stop-time turning control unit 32b (FIG. 2), for example, as shown in FIG. 12, differs from FIG. Only one may be steered to the toe-in side to hill hold the vehicle.
- the front wheel 1 has a toe angle of +20 degrees and a rear wheel steering control unit 32b (FIG. 2) so that the toe-in angle or toe-out angle of the front wheel 1 is different from the toe-in angle or toe-out angle of the rear wheel 2.
- the wheel 2 may steer the steering device 4 so that the toe angle is +10 degrees.
- the stop-time steering control unit 32b steers the front wheels 1 to the toe-in side and steers the rear wheels 2 to the toe-out side.
- the stop-time steering control unit 32b steers the front wheels 1 to the toe-out side and steers the rear wheels 2 to the to-in side.
- the vehicle can be reliably hill-held by increasing the frictional force with the road surface more than when only one of the front and rear wheels 1 and 2 is steered.
- the stop-time steering control unit 32b may steer the rear wheel 2 so that only the rear wheel 2 is steered to the toe-in or toe-out side.
- FIG. 13 is a flowchart of the control operation of the stop-time steering control unit 32b in the vehicle stop control device according to still another embodiment of the present invention.
- the stop control device starts this processing in the normal travel mode, the lateral movement mode, or the spot rotation mode.
- the stop-time steering control unit 32b has a detected vehicle speed V equal to or lower than a first threshold value V THR1 (
- step a1: YES the stop-time steering control unit determines that the detected vehicle speed V is equal to or higher than the second threshold value V THR2 (V THR2 ⁇
- step a3: YES the hill hold control for turning the wheel as described above is turned on (step a4).
- step a3: NO the process proceeds to step a2. Thereafter, this process is terminated. In this way, the hill hold control is not performed when the vehicle speed is equal to or lower than the first threshold and the accelerator input value is equal to or lower than the threshold. The effectiveness of stopping undesired movement of the vehicle can be enhanced.
- the stop-time steering control unit 32b may cause the vehicle display device to display that effect while the vehicle is being hill-held.
- the driver or the like can recognize that the vehicle is hill-hold controlled by looking at the information displayed on the display device.
- the stop control device may be provided with a switch for releasing the hill hold of the vehicle by the stop-time steering control unit 32b. For example, by forcibly canceling the hill hold of the vehicle with the switch according to the driver's preference, the vehicle can be started smoothly without delay from the time when the vehicle is stopped.
- the driving wheel may be driven and driven by an on-board driving device including the electric motor 6.
- a steering input means for operating the steering device 4 a steering wheel or a known accelerator pedal provided on the floor portion in front of the driver's seat 11 may be applied.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- General Engineering & Computer Science (AREA)
- Mathematical Physics (AREA)
- Physics & Mathematics (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Steering Controls (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
Abstract
全車輪を独立転舵可能な車両において、車両をヒルホールドさせるにつき、操作性の向上を図ると共に、構造を簡単化し製造コストの低減を図ることができる車両の停車制御装置を提供する。車輪1,2の操舵角を入力する操舵入力手段21から入力された操舵量信号により定められた転舵量指令値を転舵装置4へ出力する通常時転舵制御部32aと、回転角センサ10から出力された回転角信号より車速を検出し、この検出された車速が閾値以下で、かつ、アクセルの入力値が閾値以下のとき、1輪以上の車輪1,2の転舵装置4を、通常時転舵制御部32aの転舵量指令値よりも大きくトーインまたはトーアウト側へ転舵させて車両をヒルホールドさせる停車時転舵制御部32bとを設けた。
Description
本出願は、2013年4月5日出願の特願2013-079283の優先権を主張するものであり、その全体を参照により本願の一部をなすものとして引用する。
この発明は、全車輪が独立して転舵可能で、各駆動輪が独立して走行駆動可能な車両が不所望に後退等することを防止する車両の停車制御装置に関する。
車両の停車時に、例えば、パーキングブレーキを用いて車両の後退を防止する。
近年、車両の状況(例えば、降坂路の傾斜勾配など)に応じて、制御装置により前記車両に適切な制動力を付与する技術が提案されている。
例えば、傾斜角センサ、地図データ、車載カメラによる撮像画像、またはミリ波レーダ装置などのセンサ装置による検出結果を用いて降坂路の傾斜勾配の大きさを判断し、トーイン方向またはトーアウト方向のトー角を車輪に付与して、車両の制動を図る技術が提案されている(特許文献1)。
近年、車両の状況(例えば、降坂路の傾斜勾配など)に応じて、制御装置により前記車両に適切な制動力を付与する技術が提案されている。
例えば、傾斜角センサ、地図データ、車載カメラによる撮像画像、またはミリ波レーダ装置などのセンサ装置による検出結果を用いて降坂路の傾斜勾配の大きさを判断し、トーイン方向またはトーアウト方向のトー角を車輪に付与して、車両の制動を図る技術が提案されている(特許文献1)。
車両の一時的な停車時にパーキングブレーキを用いる技術では、運転者の手間がかかり操作上煩雑である。
従来の制御装置による技術では、GPS情報、Gセンサ、ミリ波レーダ装置、車載カメラ等を用いて制御を行うために、機構が複雑となる。
従来の制御装置による技術では、GPS情報、Gセンサ、ミリ波レーダ装置、車載カメラ等を用いて制御を行うために、機構が複雑となる。
この発明の目的は、全車輪を独立転舵可能な車両において、車両をヒルホールドさせるにつき、操作性の向上を図ると共に、構造を簡単化し製造コストの低減を図ることができる車両の停車制御装置を提供することである。
以下、この発明について、理解を容易にするために、便宜上実施形態の符号を参照して説明する。
請求の範囲および/または明細書および/または図面に開示された少なくとも2つの構成のどのような組合せも、本発明に含まれる。特に、請求の範囲の各請求項の2つ以上のどのような組合せも、本発明に含まれる。
この発明は、添付の図面を参考にした以下の好適な実施形態の説明から、より明瞭に理解されるであろう。しかしながら、実施形態および図面は単なる図示および説明のためのものであり、この発明の範囲を定めるために利用されるべきものではない。この発明の範囲は添付の請求の範囲によって定まる。添付図面において、複数の図面における同一の符号は、同一または相当する部分を示す。
この発明の第1の実施形態を図1ないし図7と共に説明する。図1によると、この実施形態の車両は、電気自動車であって、前輪となる左右2つの車輪1,1と、後輪となる左右2つの車輪2,2とが設けられている。全ての車輪1,2には、いずれも独立して転舵可能な転舵装置4が設けられている。各車輪1,2は、図示の例ではいずれも駆動輪であって、各々独立して、駆動源6を含む走行駆動機構5により走行駆動される。
走行駆動機構5は、この例ではインホイールモータ駆動装置であり、車輪1,2をそれぞれ支持する車輪用軸受7と、駆動源である電動機6と、電動機6の出力する回転を減速して車輪用軸受7の回転側軌道輪(図示せず)に伝達する減速機8とを有する。走行駆動機構5は、これら車輪用軸受7、電動機6、および減速機8が、共通のハウジングに設置されて、または互いに結合されて一体化される。その一体化された走行駆動機構5が、図示外のサスペンションを介して、上下方向の支軸9回りに回転自在に、車体3に設置されている。電動機6は、このモータロータ(図示せず)の回転角信号を出力する回転角センサ10を有し、後述するインバータ装置は、回転角センサ10から回転角信号を得て、ベクトル制御等の回転角に応じた制御を行う。
転舵装置4は、電動モータ等からなる転舵用駆動源4aと、この転舵用駆動源4aの回転を前記走行駆動機構5に伝達する伝達機構4bとを有する。伝達機構4bは、例えばギヤ列からなる。この例の転舵装置4は、操舵入力手段としてのジョイスティック21に対し、機械的に連結されていないステアバイワイヤ方式である。伝達機構4bは、この他にギヤとボールねじやラック・ピニオン機構等の回転・直線運動変換手段との組み合わせであっても良い。
この電気自動車は、全車輪1,2が独立して転舵可能な転舵装置4を備える構成、および、全駆動輪1,2が各々独立して駆動可能とされた構成によって、図3Aに示す通常走行モードと、図3B,図3Cにそれぞれ示すその場回転モードまたは横方向移動モードである非通常走行モードで移動することが可能である。
図3Aの通常走行モードは、通常の直進や、円弧状の曲線方向の走行であり、後述のその場回転モードおよび横方向移動モードである非通常走行モード以外の走行形態である。通常走行モードでは、左右の車輪1,1,2,2は、互いに同じ方向に転舵されることになる。
図3Aの通常走行モードは、通常の直進や、円弧状の曲線方向の走行であり、後述のその場回転モードおよび横方向移動モードである非通常走行モード以外の走行形態である。通常走行モードでは、左右の車輪1,1,2,2は、互いに同じ方向に転舵されることになる。
図3Bのその場回転モードは、車体3の略中心を回転としてその場で(回転半径を略零として)回転させる移動形態である。その場回転モードは、具体的には、各車輪1,2を互いに共通の仮想の円周Cに沿う方向、すなわち接線方向に向け、かつ車輪1,2を、前記円周の中心O側から見て、図中で矢印で示すように互いに同じ方向に回転駆動する移動形態である。したがって、左右の車輪1,1,2,2は、直進方向から互いに逆方向に転舵された状態となる。その場回転モードは、車輪1,2の回転方向を正逆に切り換えることで、左右いずれの方向にも回転可能とされる。
図3Cの横方向移動モードは、車体3を真横、または真横に近い方向に移動させる
移動形態である。横方向移動モードは、具体的には、各車輪1,2を車体3に対して横向きとして、各駆動輪となる車輪1,2を互いに同じ横方向へ転がるように回転させる形態である。通常走行モードにおける直進状態から横方向移動モードへの変更は、転舵装置4の構成にもよるが、この例では、単に転舵角を大きくするのではなく、同図中に前側の車輪1につき矩形形状の一点鎖線で転舵途中の状態を示すように、左右の車輪1,1を互いに線対称となるように逆方向に転舵させることで車輪1,1を真横に向ける。後ろ側の車輪2,2も同様である。このように転舵させて横方向移動させる場合、各駆動輪となる車輪1,2を互いに同じ横方向へ転がるように回転させる場合、左右の車輪1,1,2,2は、互いに逆方向に回転駆動させることになる。
移動形態である。横方向移動モードは、具体的には、各車輪1,2を車体3に対して横向きとして、各駆動輪となる車輪1,2を互いに同じ横方向へ転がるように回転させる形態である。通常走行モードにおける直進状態から横方向移動モードへの変更は、転舵装置4の構成にもよるが、この例では、単に転舵角を大きくするのではなく、同図中に前側の車輪1につき矩形形状の一点鎖線で転舵途中の状態を示すように、左右の車輪1,1を互いに線対称となるように逆方向に転舵させることで車輪1,1を真横に向ける。後ろ側の車輪2,2も同様である。このように転舵させて横方向移動させる場合、各駆動輪となる車輪1,2を互いに同じ横方向へ転がるように回転させる場合、左右の車輪1,1,2,2は、互いに逆方向に回転駆動させることになる。
図1において、運転操作系を説明する。車体3の車室3a内に、運転席11および助手席12となるシートが設けられており、運転操作系としては、操舵入力手段およびアクセル操作手段を兼ねるジョイスティック21と、ブレーキ操作子22とが設けられている。ブレーキ操作子22は、例えば、ブレーキペダル等からなり、運転席11の前方の床部に設けられている。
ジョイスティック21は、運転者が触れる一つの操作子によって、車輪の操舵角の入力、例えば、方向および操作量の両方の入力が行える操舵入力手段の総称であり、例えば図4に示すレバー型のジョイスティック21が採用される。このジョイスティック21は、操作子であるレバー21aが、中立位置となる直立状態から、全周の360°の任意の方向に倒れ可能であって、下記の各モード毎に、アクセル操作、転舵操作の倒れ方向は異なる。
・通常走行モード
ジョイスティックの前後方向→電気自動車の前進または後進のアクセル操作量に相当。操作量は倒れ角に比例。
ジョイスティックの横方向→ハンドルの操舵量に相当。操舵量は倒れ角に比例。
ジョイスティックを1時30分の方向、すなわち時計の文字盤における1時と2時の中間の方向へ最も倒した場合、前進方向のトルクは最大(例えば4輪合計のホイールでのトルクは400Nm)、転舵角も最大(例えば60°)となる。
・その場回転モード
ジョイスティックの前後方向→反応せず。
ジョイスティックの横方向→アクセル操作量に相当。操作量は倒れ角に比例。
ジョイスティックを3時00分の方向へ最も倒した場合、車両が右回りするトルクは最大(例えば4輪合計のホイールでのトルクは400Nm)となる。
・横方向移動モード
ジョイスティックの前後方向→反応せず。
ジョイスティックの横方向→アクセル操作量に相当。操作量は倒れ角に比例。
ジョイスティックを3時00分の方向へ最も倒した場合、右方向移動のトルクは最大(例えば4輪合計のホイールでのトルクは400Nm)となる。
・通常走行モード
ジョイスティックの前後方向→電気自動車の前進または後進のアクセル操作量に相当。操作量は倒れ角に比例。
ジョイスティックの横方向→ハンドルの操舵量に相当。操舵量は倒れ角に比例。
ジョイスティックを1時30分の方向、すなわち時計の文字盤における1時と2時の中間の方向へ最も倒した場合、前進方向のトルクは最大(例えば4輪合計のホイールでのトルクは400Nm)、転舵角も最大(例えば60°)となる。
・その場回転モード
ジョイスティックの前後方向→反応せず。
ジョイスティックの横方向→アクセル操作量に相当。操作量は倒れ角に比例。
ジョイスティックを3時00分の方向へ最も倒した場合、車両が右回りするトルクは最大(例えば4輪合計のホイールでのトルクは400Nm)となる。
・横方向移動モード
ジョイスティックの前後方向→反応せず。
ジョイスティックの横方向→アクセル操作量に相当。操作量は倒れ角に比例。
ジョイスティックを3時00分の方向へ最も倒した場合、右方向移動のトルクは最大(例えば4輪合計のホイールでのトルクは400Nm)となる。
図2には、図3を使用して説明した各走行モードを運転者の操作によって切り換える走行モード切換手段41が設けられる(図4も参照のこと)。図2に示すように、この走行モード切換手段41は、複数の入力操作手段42~45と、ECU31に設けられたモード切換制御部34とを有する。各入力操作手段42~45のうち、第1の入力操作手段42は、通常走行運転モードと非通常走行運転モードとの相互間で運転モードの切換が可能な切換準備モードとする手段であり、例えば、ジョイスティック21の前面に設けられた操作ボタンからなる。第2~第4の入力操作手段43~45は、それぞれ、その場回転モード、横方向移動モード、および通常走行モードを選択する手段であり、いずれもジョイスティック21の上端の上面に設けられた操作ボタンからなる。各入力操作手段42~45の少なくともいずれか1つの設置場所は、ジョイスティック21に限らず、例えば、ダッシュボード24の表面等に設けられても良い。
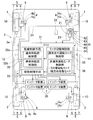
図2と共に制御系を説明する。ECU31が、ジョイスティック21で入力された操舵量信号に対して定められた比率の転舵量指令値を転舵用駆動源4aへ出力する車両において、この車両の停車制御装置は、転舵装置4の転舵動作を制御する。
転舵装置4および走行駆動機構5を制御する制御手段として、前記ECU31と複数のインバータ装置39とを備える。インバータ装置39は、各車輪の走行駆動機構5の電動モータである電動機6を駆動する装置であり、バッテリBt(図5)の直流電力を交流電力に変換するインバータ等のパワー回路部と、このパワー回路部をECU31の指令に従って制御する制御回路部とを有する。
ECU31は、自動車の全体を統括制御、協調制御する電気制御ユニットであり、マイクロコンピュータと電子回路等からなる。ECU31は、転舵装置4と走行駆動機構5とを制御する統合制御手段である。このECU31は、機能別の複数のECUからなるものであっても良く、ここではこれら複数のECUを纏めたものをECU31として説明する。ECU31には、転舵制御手段32と、駆動制御手段33と、モード切換制御部34とが設けられる。
転舵制御手段32は、通常時転舵制御部32aと、停車時転舵制御部32bとを有する。通常時転舵制御部32aは、操舵入力手段であるジョイスティック21から入力された操舵量信号に対して定められた転舵量指令値を各転舵装置4の転舵用駆動源4aへ出力する。前記「操舵量信号」は、操舵方向および操舵量の大きさである信号を意味する。前記「転舵量指令値」は、転舵用駆動源4aの駆動方向(転舵方向)および転舵駆動量(前記操舵量)の大きさである指令値を意味する。また前記定められた転舵量指令値は、任意に定めれば良いが、原則、操舵量信号が大きくなれば、転舵量指令値も大きくなる比例関係で、例えば、実車試験、シミュレーション等により適宜に定められる。
停車時転舵制御部32bは、定められた条件を満たすとき、1輪以上の車輪1,2の転舵装置4を、通常時転舵制御部32aの転舵量指令値よりも大きくトーインまたはトーアウト側へ転舵させて車両をヒルホールドさせる。転舵させる車輪の例については後述する。停車時転舵制御部32bは、前記定められた条件として、回転角センサ10から出力された回転角信号より車速を検出し、この検出された車速が閾値以下で、かつ、アクセルの入力値が閾値以下の条件を満たすか否かを判定する。前記アクセルの入力値とは、この例では、ジョイスティック21におけるレバー21aの中立位置からの倒れ量、すなわち前記ジョイスティック21の前後方向への前記倒れ角を意味する。
なお、本実施形態において、車両の停車制御装置は、通常時転舵制御部32aと、停車時転舵制御部32bとを少なくとも含む。
駆動制御手段33は、ジョイスティック21で入力される前記アクセル操作量の信号に従って、各車輪1,2の電動機6のインバータ装置39へトルク指令等の駆動指令を出力する手段である。なおアクセル操作量の信号は、加速指令、減速指令、および速度維持指令を含む。
モード切換制御部34は、走行モードを、通常走行モードと、非通常走行モードとに、モード切換信号によって切り換える手段である。この例では、モード切換制御部34は、切換機能の他に、各走行モードに応じて転舵制御手段32および駆動制御手段33を機能させる通常走行運転モード制御部35および非通常運転モード制御部36を有する。前述のように、モード切換制御部34と、モード切換用の入力操作手段42~45とで、走行モード切換手段41が構成される。
通常走行運転モード制御部35は、転舵制御手段32および駆動制御手段33を、転舵およびアクセル操作手段であるジョイスティック21からの操舵入力(すなわち前記操舵量)およびアクセル操作量の信号によって、通常に、つまり定められた基本動作となるように機能させる手段である。この基本動作は、操舵方向の入力に応じて(すなわち前記操舵量に応じて)その入力された方向へ転舵させる指令を転舵制御手段32における通常時転舵制御部32aに行わせ、またアクセル操作量に応じた駆動指令を駆動制御手段33に行わせる動作である。
但し、通常走行モードであっても、転舵制御手段32における停車時転舵制御部32bが前記定められた条件を満たすと判定すると、停車時転舵制御部32bは、1輪以上の車輪1,2の転舵装置4を、通常時転舵制御部32aの転舵量指令値よりも大きくトーインまたはトーアウト側へ転舵させて車両をヒルホールドさせる。
非通常運転モード制御部36は、その場回転モードのとき、図3Bを使用して前述したその場回転モードとなるように、転舵制御手段32および駆動制御手段33を制御する。前記その場回転モードのときも、停車時転舵制御部32bが前記定められた条件を満たすと判定すると、停車時転舵制御部32bによるヒルホールド制御を実行する。なぜならば、回転中心と重心位置が異なると、不所望に前進・後退はしないが、車両が回転する可能性があるからである。
本実施形態では、モード切換制御部34における各モード制御部35,36がヒルホールド制御を行うか否かを判断しているが、この例に限定されるものではない。例えば、停車時転舵制御部32bが、各走行モードにおいてそれぞれヒルホールド制御を行うか否かを判断しても良い。この場合、例えば、停車時転舵制御部32bは、その場回転モードのときのみヒルホールド制御を行わないようにしても良い。
本実施形態では、モード切換制御部34における各モード制御部35,36がヒルホールド制御を行うか否かを判断しているが、この例に限定されるものではない。例えば、停車時転舵制御部32bが、各走行モードにおいてそれぞれヒルホールド制御を行うか否かを判断しても良い。この場合、例えば、停車時転舵制御部32bは、その場回転モードのときのみヒルホールド制御を行わないようにしても良い。
非通常運転モード制御部36は、横方向移動モードのとき、図3Cを使用して前述した横方向移動モードとなるように、転舵制御手段32および駆動制御手段33を制御する。但し、横方向移動モードであっても、停車時転舵制御部32bが前記定められた条件を満たすと判定すると、停車時転舵制御部32bはヒルホールド制御を実行する。
ジョイスティック21において、操舵方向の入力やアクセルの入力が同じようになされても、通常走行運転モード制御部35および非通常運転モード制御部36が介在することで、転舵制御手段32および駆動制御手段33は異なる動作を行うことになる。
ジョイスティック21において、操舵方向の入力やアクセルの入力が同じようになされても、通常走行運転モード制御部35および非通常運転モード制御部36が介在することで、転舵制御手段32および駆動制御手段33は異なる動作を行うことになる。
図5は、この車両において、ヒルホールド制御を行っていない通常状態を平面視で示す説明図である。図2と共に説明する。この例では、走行モードが通常走行モードとされており、以下の説明図についても同じである。通常走行運転モード制御部35は、ジョイスティック21からの操舵入力に応じてその入力された方向へ車輪1,2を転舵させる指令を転舵制御手段32における通常時転舵制御部32aに行わせている。
図6は、同車両の停車制御装置において、例えば、右前輪1のみ転舵させるヒルホールド制御を実行させている状態を平面視で示す説明図である。図2と共に説明する。停車時転舵制御部32bが前記定められた条件を満たすと判定すると、この停車時転舵制御部32bは、右前輪1の転舵装置4のみを、通常時転舵制御部32aの転舵量指令値よりも大きくトーイン側へ転舵させるヒルホールド制御を実行する。このヒルホールド制御時における右前輪1の転舵角αを、例えば、車体3の前後方向に対して、30度以上75度以下のトー角とすることで、この転舵させた右車輪1と路面との摩擦により、車両をヒルホールドさせ得る。
図7は、この車両の停車制御装置における停車時転舵制御部の制御動作のフローチャートである。図2と共に説明する。停車制御装置は、通常走行モードまたは横方向移動モードまたはその場回転モードのとき本処理を開始する。停車時転舵制御部32bは、回転角センサ10から出力された回転角信号より車速Vを検出し、この検出された車速Vが閾値VTHR1以下(|V|≦VTHR1:例えば、車両が停止状態)で、かつ、アクセルの入力値が閾値ACCTHR以下(|ACC|≦ACCTHR:例えば、アクセル操作量が「零」)か否かを判定する(ステップs1)。この定められた条件を満たすとき(ステップs1:YES)、車輪1,2を前記のように転舵させるヒルホールド制御(停止制御とも言う)をオンにする(ステップs2)。前記条件を満たさないとき(ステップs1:NO)、ヒルホールド制御をオフにする(ステップs3)。その後本処理を終了する。
作用効果について説明する。
通常時においては、車両の運転者がジョイスティック21を操舵すると、通常時転舵制御部32aは、ジョイスティック21から入力された操舵量信号に対して転舵量指令値を転舵装置4へ出力する。
通常時においては、車両の運転者がジョイスティック21を操舵すると、通常時転舵制御部32aは、ジョイスティック21から入力された操舵量信号に対して転舵量指令値を転舵装置4へ出力する。
車両の停車時において、例えば、車両を坂路にて一時的に停車させる場合、停車時転舵制御部32bは、電動機6の回転角センサ10から出力された回転角信号より車速を検出し、この検出された車速が閾値以下で、かつ、アクセルの入力値が閾値以下のとき、車輪1,2の転舵装置4を、通常時転舵制御部32aの転舵量指令値よりも大きくトーインまたはトーアウト側へ転舵させる。前記転舵させた車輪1,2と路面との摩擦力により、車両が不所望に後退または前進することを防止できる。このように電動機6に付属の回転角センサ10を利用して車速を検出し、車両をヒルホールドさせることができるため、従来技術よりも構造を簡単化し、製造コストの低減を図れる。また運転者による操作を必要とせずに、ヒルホールドさせることができるため、運転者の操作や技量に依存することなく車両をヒルホールドさせることができ、操作性の向上を図れる。
他の実施形態について説明する。
図8に示すように、停車時転舵制御部32b(図2)は、全車輪1,2の転舵装置4を前記転舵量指令値よりも大きくトーインまたはトーアウト側(図8の例ではトーイン側)へ転舵させるものとしても良い。この場合、全車輪1,2と路面との摩擦力をより大きくして車両を確実にヒルホールドさせることができる。
図8に示すように、停車時転舵制御部32b(図2)は、全車輪1,2の転舵装置4を前記転舵量指令値よりも大きくトーインまたはトーアウト側(図8の例ではトーイン側)へ転舵させるものとしても良い。この場合、全車輪1,2と路面との摩擦力をより大きくして車両を確実にヒルホールドさせることができる。
図9に示すように、停車時転舵制御部32b(図2)は、前輪1,1のみトーインまたはトーアウト側(図9の例ではトーイン側)へ転舵させるように前記前輪1,1の転舵装置4,4を転舵させても良い。この場合、前輪1,1のいずれか一方のみを転舵させるよりも、車輪と路面との摩擦力をより大きくして車両を確実にヒルホールドさせることができる。
図10は、この車両において、ヒルホールド制御を行っていない転舵時の通常状態を平面視で示す説明図であり、図11は、この発明のさらに他の実施形態に係る車両の停車制御装置において、転舵時に右前輪1のみトーインさせるヒルホールド制御を実行させている状態を平面視で示す説明図である。図10に示す左前方へ進行する転舵時の通常状態において、停車時転舵制御部32b(図2)が前記定められた条件を満たすと判定すると、図11に示すように、右前輪1のみさらにトーイン側へ転舵させて車両をヒルホールドさせても良い。図10の転舵時通常状態では、ジョイスティックから操舵量信号が入力されているが、図11の状態では、停車時転舵制御部32b(図2)は、前記操舵量信号に対して定められた転舵量指令値よりもさらに大きく右前輪1の転舵装置4をトーイン側へ転舵させる。
転舵時の通常状態から、停車時転舵制御部32b(図2)は、例えば図12に示すように、図11とは異なり、右前方に進行する場合に、トーアウト側となるべき右前輪1のみトーイン側へ転舵させて車両をヒルホールドさせても良い。
停車時転舵制御部32b(図2)は、前輪1のトーイン角またはトーアウト角と、後輪2のトーイン角またはトーアウト角とを異ならせるように、例えば、前輪1はトー角+20度、後輪2はトー角+10度となるように前記転舵装置4を転舵させるものとしても良い。例えば、停車時転舵制御部32bは、前輪1をトーイン側へ転舵させ、後輪2をトーアウト側へ転舵させる。逆に、停車時転舵制御部32bは、前輪1をトーアウト側へ転舵させ、後輪2をトーイン側へ転舵させる。これらの場合、前後輪1,2のいずれか一方のみを転舵させる場合よりも路面との摩擦力をより大きくして車両を確実にヒルホールドさせることができる。
停車時転舵制御部32bは、後輪2のみトーインまたはトーアウト側へ転舵させるように前記後輪2の転舵装置4を転舵させても良い。
図13は、この発明のさらに他の実施形態に係る車両の停車制御装置における停車時転舵制御部32bの制御動作のフローチャートである。停車制御装置は、通常走行モードまたは横方向移動モードまたはその場回転モードのとき本処理を開始する。停車時転舵制御部32bは、検出された車速Vが第1の閾値VTHR1以下(|V|≦VTHR1:例えば、車両が停止状態)で、かつ、アクセルの入力値が閾値ACCTHR以下(|ACC|≦ACCTHR:例えば、アクセル操作量が「零」)か否かを判定する(ステップa1)。前記条件を満たさないとき(ステップa1:NO)、ヒルホールド制御をオフにする(ステップa2)。
前記条件を満たした後(ステップa1:YES)、停車時転舵制御部は、検出された車速Vが第2の閾値VTHR2以上(VTHR2≦|V|:例えば、坂路において車両が不所望に動き始めたことを意味する)と判定すると(ステップa3:YES)、車輪を前記のように転舵させるヒルホールド制御をオンにする(ステップa4)。検出された車速Vが第2の閾値VTHR2未満との判定で(ステップa3:NO)、ステップa2に移行する。その後本処理を終了する。
このように車速が第1の閾値以下、かつ、アクセルの入力値が閾値以下の条件でヒルホールド制御を行うのではなく、さらに車速が第2の閾値以上のときにヒルホールド制御を行うことで、車両の不所望な動きを停止させる実効性を高めることができる。
このように車速が第1の閾値以下、かつ、アクセルの入力値が閾値以下の条件でヒルホールド制御を行うのではなく、さらに車速が第2の閾値以上のときにヒルホールド制御を行うことで、車両の不所望な動きを停止させる実効性を高めることができる。
停車時転舵制御部32bは、前記車両をヒルホールドさせている間、前記車両の表示装置にその旨表示させるようにしても良い。運転者等は、表示装置に表示された情報を見て車両がヒルホールド制御されていることを認識することができる。
前記停車制御装置には、前記停車時転舵制御部32bによる車両のヒルホールドを解除するスイッチを設けても良い。例えば、運転者の好みなどに応じて前記スイッチにより車両のヒルホールドを強制的に解除することで、車両の停車時からこの車両をスムーズに遅滞なく発進させることができる。駆動輪は、電動機6を含むオンボード駆動装置により走行駆動されるものであっても良い。
転舵装置4を操作する操舵入力手段として、ステアリングホイールや、運転席11の前方の床部に設けられている公知のアクセルペダル等を適用しても良い。
以上のとおり、図面を参照しながら好適な実施形態を説明したが、当業者であれば、本件明細書を見て、自明な範囲内で種々の変更および修正を容易に想定するであろう。したがって、そのような変更および修正は、請求の範囲から定まる発明の範囲内のものと解釈される。
1,2…車輪
4…転舵装置
5…走行駆動機構(インホイールモータ駆動装置)
6…電動機
10…回転角センサ
21…ジョイスティック(操舵入力手段)
32a…通常時転舵制御部
32b…停車時転舵制御部
4…転舵装置
5…走行駆動機構(インホイールモータ駆動装置)
6…電動機
10…回転角センサ
21…ジョイスティック(操舵入力手段)
32a…通常時転舵制御部
32b…停車時転舵制御部
Claims (6)
- 4輪以上の車輪と、全車輪に独立して転舵可能な転舵装置とを有し、前記各車輪のうち駆動輪は、各々独立した電動機により走行駆動され、前記電動機は、回転角信号を出力する回転角センサを有する車両であって、
前記車輪の操舵角を入力する操舵入力手段から入力された操舵量信号により定められた転舵量指令値を前記転舵装置へ出力する通常時転舵制御部と、
前記回転角センサから出力された回転角信号より車速を検出し、この検出された車速が閾値以下で、かつ、アクセルの入力値が閾値以下のとき、1輪以上の車輪の前記転舵装置を、前記通常時転舵制御部の転舵量指令値よりも大きくトーインまたはトーアウト側へ転舵させて、前記車両をヒルホールドさせる停車時転舵制御部と、
を設けた車両の停車制御装置。 - 請求項1記載の車両の停車制御装置において、前記操舵入力手段がジョイスティックまたはステアリングホイールである車両の停車制御装置。
- 請求項1または請求項2に記載の車両の停車制御装置において、前記停車時転舵制御部は、前輪のトーイン角またはトーアウト角と、後輪のトーイン角またはトーアウト角とを異ならせるように前記転舵装置を転舵させる車両の停車制御装置。
- 請求項1ないし請求項3のいずれか1項に記載の車両の停車制御装置において、前記停車時転舵制御部は、前記車両が右前方へ進行する場合には、右前輪をトーイン側へ転舵させ、前記車両が左前方へ進行する場合には、左前輪をトーイン側へ転舵させる車両の停車制御装置。
- 請求項1ないし請求項4のいずれか1項に記載の車両の停車制御装置において、前記停車時転舵制御部は、前記回転角センサから出力された回転角信号より車速を検出し、この検出された車速が第1の閾値以下で、かつ、アクセルの入力値が閾値以下の後に、車速が第2の閾値以上のとき、1輪以上の車輪の前記転舵装置を、前記通常時転舵制御部の転舵量指令値よりも大きくトーインまたはトーアウト側へ転舵させて前記車両をヒルホールドさせる車両の停車制御装置。
- 請求項1ないし請求項5のいずれか1項に記載の車両の停車制御装置において、前記駆動輪は、前記電動機を含むインホイールモータ駆動装置により走行駆動されるものである車両の停車制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201480017871.2A CN105102305B (zh) | 2013-04-05 | 2014-03-17 | 车辆的停车控制装置 |
| EP14778485.4A EP2982571A4 (en) | 2013-04-05 | 2014-03-17 | VEHICLE STOP CONTROL DEVICE |
| US14/875,057 US9694852B2 (en) | 2013-04-05 | 2015-10-05 | Vehicle stop control device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013079283A JP6243134B2 (ja) | 2013-04-05 | 2013-04-05 | 車両の停車制御装置 |
| JP2013-079283 | 2013-04-05 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US14/875,057 Continuation US9694852B2 (en) | 2013-04-05 | 2015-10-05 | Vehicle stop control device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014162860A1 true WO2014162860A1 (ja) | 2014-10-09 |
Family
ID=51658160
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/057194 WO2014162860A1 (ja) | 2013-04-05 | 2014-03-17 | 車両の停車制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9694852B2 (ja) |
| EP (1) | EP2982571A4 (ja) |
| JP (1) | JP6243134B2 (ja) |
| CN (1) | CN105102305B (ja) |
| WO (1) | WO2014162860A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106240550A (zh) * | 2015-06-11 | 2016-12-21 | 罗伯特·博世有限公司 | 用于固定车辆的方法 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103754284A (zh) * | 2014-01-28 | 2014-04-30 | 浙江诺力机械股份有限公司 | 一种可以四向行驶的工业车辆及该种工业车辆的行走机构 |
| JP2017081245A (ja) | 2015-10-23 | 2017-05-18 | 本田技研工業株式会社 | 車両制御装置 |
| DE102017010427A1 (de) * | 2017-11-10 | 2019-05-16 | Roland Kolbeck | Lenksystem für bewegbare angetriebene Vorrichtungen |
| JP6611378B2 (ja) * | 2018-01-24 | 2019-11-27 | 本田技研工業株式会社 | 転舵機構及び車両 |
| KR20190119295A (ko) * | 2018-04-12 | 2019-10-22 | 현대모비스 주식회사 | 분리형 후륜 조향 제어 장치 및 방법 |
| JP7212460B2 (ja) * | 2018-06-06 | 2023-01-25 | 株式会社小松製作所 | 作業車両 |
| US11702136B2 (en) * | 2019-09-18 | 2023-07-18 | Deere & Company | Reverse steering modes for agricultural vehicles |
| KR102309537B1 (ko) * | 2019-11-22 | 2021-10-07 | 주식회사 디카트 | 전자적인 조향제어가 가능한 전동보드 |
| JP7480509B2 (ja) * | 2020-01-13 | 2024-05-10 | 株式会社デンソー | 操舵制御装置、操舵制御方法、操舵制御プログラム |
| JP7372598B2 (ja) * | 2020-06-02 | 2023-11-01 | トヨタ自動車株式会社 | 車両 |
| KR20220055947A (ko) * | 2020-10-27 | 2022-05-04 | 현대자동차주식회사 | 4륜 독립조향 차량의 제자리 회전모드 제어방법 및 시스템 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02189281A (ja) * | 1989-01-18 | 1990-07-25 | Mazda Motor Corp | 車両の後輪操舵装置 |
| JPH11229917A (ja) * | 1998-02-17 | 1999-08-24 | Nissan Motor Co Ltd | 車両制御装置 |
| WO2006114977A1 (ja) * | 2005-04-20 | 2006-11-02 | Equos Research Co., Ltd. | 制御装置、及び、車両 |
| JP2007145253A (ja) | 2005-11-29 | 2007-06-14 | Equos Research Co Ltd | 制御装置及び車両 |
| WO2007119298A1 (ja) * | 2006-03-17 | 2007-10-25 | Equos Research Co., Ltd. | 制御装置及び車両 |
| JP2012091687A (ja) * | 2010-10-27 | 2012-05-17 | Komatsu Ltd | 作業車両 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05252612A (ja) * | 1991-04-22 | 1993-09-28 | Honda Motor Co Ltd | 電気走行車 |
| EP1361124A1 (fr) * | 2002-05-03 | 2003-11-12 | Conception et Développement Michelin S.A. | Dispositif électrique de frein de parking |
| WO2006118080A1 (ja) * | 2005-04-28 | 2006-11-09 | Equos Research Co., Ltd. | 制御装置及び車両 |
| JP2007237838A (ja) * | 2006-03-07 | 2007-09-20 | Nissan Motor Co Ltd | ステアリング装置、自動車、及びステアリング制御方法 |
| CN102666258B (zh) * | 2009-11-16 | 2014-07-23 | 本田技研工业株式会社 | 后轮转向控制装置 |
| JP2012017093A (ja) * | 2010-06-09 | 2012-01-26 | Ntn Corp | 電気自動車 |
| EP2875974B1 (en) * | 2012-07-20 | 2016-08-03 | Nissan Motor Co., Ltd. | Vehicular suspension unit, automobile utilizing same, and steering control method |
-
2013
- 2013-04-05 JP JP2013079283A patent/JP6243134B2/ja not_active Expired - Fee Related
-
2014
- 2014-03-17 CN CN201480017871.2A patent/CN105102305B/zh not_active Expired - Fee Related
- 2014-03-17 EP EP14778485.4A patent/EP2982571A4/en not_active Withdrawn
- 2014-03-17 WO PCT/JP2014/057194 patent/WO2014162860A1/ja active Application Filing
-
2015
- 2015-10-05 US US14/875,057 patent/US9694852B2/en not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02189281A (ja) * | 1989-01-18 | 1990-07-25 | Mazda Motor Corp | 車両の後輪操舵装置 |
| JPH11229917A (ja) * | 1998-02-17 | 1999-08-24 | Nissan Motor Co Ltd | 車両制御装置 |
| WO2006114977A1 (ja) * | 2005-04-20 | 2006-11-02 | Equos Research Co., Ltd. | 制御装置、及び、車両 |
| JP2007145253A (ja) | 2005-11-29 | 2007-06-14 | Equos Research Co Ltd | 制御装置及び車両 |
| WO2007119298A1 (ja) * | 2006-03-17 | 2007-10-25 | Equos Research Co., Ltd. | 制御装置及び車両 |
| JP2012091687A (ja) * | 2010-10-27 | 2012-05-17 | Komatsu Ltd | 作業車両 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2982571A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106240550A (zh) * | 2015-06-11 | 2016-12-21 | 罗伯特·博世有限公司 | 用于固定车辆的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160023679A1 (en) | 2016-01-28 |
| EP2982571A1 (en) | 2016-02-10 |
| CN105102305A (zh) | 2015-11-25 |
| CN105102305B (zh) | 2017-10-24 |
| US9694852B2 (en) | 2017-07-04 |
| EP2982571A4 (en) | 2016-11-02 |
| JP2014201217A (ja) | 2014-10-27 |
| JP6243134B2 (ja) | 2017-12-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6243134B2 (ja) | 車両の停車制御装置 | |
| US9676410B2 (en) | Stop control device of vehicle | |
| WO2013080886A1 (ja) | 自動車 | |
| WO2011155558A1 (ja) | 電気自動車 | |
| JP5077547B2 (ja) | 車両用駐車支援装置 | |
| US11124231B2 (en) | Vehicle | |
| US10040478B2 (en) | Vehicle | |
| JP5936979B2 (ja) | 電気自動車の制御装置 | |
| US20200231200A1 (en) | Vehicle | |
| WO2014199877A1 (ja) | ジョイスティック操舵車両 | |
| JP2013112102A (ja) | 自動車 | |
| CN110494338B (zh) | 停车辅助装置 | |
| JP2009101776A (ja) | 車両用駐車支援装置 | |
| JP2021107223A (ja) | 車両運動制御装置、制御装置、マネージャ、方法、プログラム、および車両 | |
| JP2006123605A (ja) | 自動誘導装置 | |
| JP2018192901A (ja) | 自動運転車両の退避制御装置 | |
| JP2012106523A (ja) | 電動車両 | |
| US11577779B2 (en) | Control method of reducing a steering load of an in-wheel motor vehicle | |
| JPH10226351A (ja) | 操舵装置 | |
| JP5992237B2 (ja) | 転舵アシスト制御装置 | |
| JP2013241083A (ja) | 転舵機構制御装置 | |
| KR20210076269A (ko) | 후륜잠금 방식의 주차 및 방향전환 보조 시스템 및 그 방법 | |
| JP2006088828A (ja) | 自動操舵装置 | |
| WO2023053694A1 (ja) | 出庫支援装置 | |
| KR20160039933A (ko) | 차량 조향 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201480017871.2 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14778485 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2014778485 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |