WO2013111365A1 - 電動パワーステアリング装置 - Google Patents
電動パワーステアリング装置 Download PDFInfo
- Publication number
- WO2013111365A1 WO2013111365A1 PCT/JP2012/067190 JP2012067190W WO2013111365A1 WO 2013111365 A1 WO2013111365 A1 WO 2013111365A1 JP 2012067190 W JP2012067190 W JP 2012067190W WO 2013111365 A1 WO2013111365 A1 WO 2013111365A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- motor
- heat sink
- relay member
- electric power
- steering apparatus
- Prior art date
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0403—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0403—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box
- B62D5/0406—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box including housing for electronic control unit
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
- H02K11/33—Drive circuits, e.g. power electronics
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K9/00—Arrangements for cooling or ventilating
- H02K9/22—Arrangements for cooling or ventilating by solid heat conducting material embedded in, or arranged in contact with, the stator or rotor, e.g. heat bridges
- H02K9/227—Heat sinks
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2209/00—Specific aspects not provided for in the other groups of this subclass relating to systems for cooling or ventilating
Definitions
- the present invention relates to an electric power steering apparatus, and more particularly to an electric power steering apparatus in which a motor for assisting a steering force of a driver and a control apparatus for controlling the motor are integrated.
- a conventional electric power steering device mainly includes a motor for assisting the steering force of a driver, a control device for controlling the motor, and a connecting device for a reduction mechanism that decelerates the output of the motor and transmits it to the steering shaft. And sensors for detecting the steering force of the driver and the like.
- the gear portion may be referred to as an electric power steering device.
- Patent Document 2 a control device integrated electric power steering device in which a motor and a control device are integrated has been proposed (for example, see Patent Document 2).
- a control device is arranged on the output side of the motor (hereinafter referred to as the front side) in the direction in which the axis of the motor extends (hereinafter referred to as the axial direction). Yes.
- the conventional electric power steering apparatus disclosed in Patent Document 1 has only one motor itself, but with two sets of three-phase stator windings and drive circuits corresponding to these stator windings.
- a configuration is shown in which two sets of inverters are provided and the motor and the control device are juxtaposed in the direction in which the axis of the output shaft of the motor extends.
- the power module which is the main component constituting the inverter circuit, is arranged so that the plane extending direction thereof is substantially parallel to the axial direction of the motor (hereinafter, this arrangement is referred to as vertical installation). Called).
- the power module is installed vertically, and the stator winding of the motor and the power module are connected at the upper end of the power module located at a position far from the motor. There is a problem that the assembly is complicated.
- the present invention has been made to solve the above-described problems in the conventional electric power steering apparatus, and an object thereof is to provide an electric power steering apparatus having a shorter shaft length and good heat dissipation. .
- the electric power steering device is: A motor having a plurality of independent stator windings; and a control device having a plurality of drive circuits for individually driving the plurality of stator windings, and driven by the control device.
- An electric power steering device that assists the steering force of the driver based on the output of the motor, A relay member disposed on the control device and having a surface portion disposed perpendicular to the axial direction of the motor;
- the plurality of drive circuits include a power module containing a plurality of power elements composed of switching elements that control power supplied to the corresponding stator windings, and a plurality of electrical circuits as components of the drive circuit. Having an element,
- An electric power steering apparatus comprising at least one of the following (1) and (2).
- the power modules of the plurality of drive circuits are each mounted on a heat sink disposed at a position away from the surface portion of the relay member such that the main surface thereof is perpendicular to the axial direction of the motor. ing.
- the electric element of the drive circuit is mounted on the surface portion of the relay member so that the extending direction of the maximum outer dimension is perpendicular to the axial direction of the motor.
- the main surface of the power module means a surface having the largest surface area of the outer surface of the power module and extending substantially planarly, and a so-called surface or back surface other than the side surface corresponds to this. .
- the shaft length is short, and the heat radiation is transmitted over a wide range from the heat sink to other components, so that high heat dissipation can be provided.
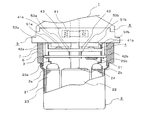
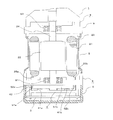
- FIG. 1 is a partial cross-sectional view showing an electric power steering apparatus according to Embodiment 1 of the present invention.
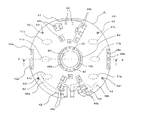
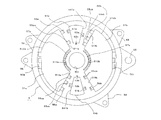
- FIG. 3 is a plan view of a relay member in the electric power steering device according to Embodiment 1 of the present invention.
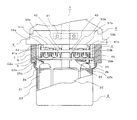
- FIG. 3 is a cross-sectional view taken along the line AA in FIG.
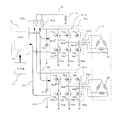
- It is a circuit block diagram of the electric power steering device by Embodiment 1 of this invention.
- It is a top view inside a control apparatus which shows arrangement
- 1 is a circuit diagram of a power module in an electric power steering device according to Embodiment 1 of the present invention.
- FIG. It is sectional drawing of the electric power steering apparatus by Embodiment 2 of this invention.
- FIG. 10 is a plan view of a relay member in an electric power steering device according to Embodiment 4 of the present invention. It is sectional drawing seen from the arrow direction along the AA line of FIG. It is a top view of a heat sink in the electric power steering device according to Embodiment 5 of the present invention.
- FIG. 10 is a plan view of a relay member in an electric power steering device according to Embodiment 5 of the present invention.
- an electric power steering apparatus 1 mainly includes a motor 2 for assisting a driver's steering force, a heat sink 5 for cooling a power module described later, and a control apparatus 6 for controlling the motor 2.
- the gear portion 8 is configured to decelerate the output of the motor 2 and transmit it to a steering shaft (not shown).
- the motor 2, the control device 6, the heat sink 5, and the gear portion 8 are sequentially arranged and integrated in the direction in which the axis of the motor 2 extends (hereinafter referred to as the axial direction).
- the motor 2 includes a stator 21 composed of a laminated core around which a first stator winding 2a connected in a three-phase delta connection and a second stator winding 2b connected in a three-phase delta connection are wound, and the stator 21 A rotor 22 inserted in the central space of the rotor, an output shaft 24 disposed in the center of the rotor 22, a yoke 23 for accommodating the stator 21, the rotor 22 and the output shaft 24 therein, It is composed of The first stator winding 2a and the second stator winding 2b form two independent stator windings.
- the control device 6 includes a control board 3 on which a microcomputer (hereinafter referred to as a CPU) 31 is mounted, and a first power module 51 a and a second power module 51 b that are two independent power modules in contact with the heat sink 5.
- a relay member 4 that is interposed between the heat sink 5 and the control board 3 and that opposes them at a predetermined interval, the control board 3, the first and second power modules 51a and 51b, and the relay member 4.
- a housing 7 for storing the inside.
- the first and second power modules 51 a and 51 b described above are formed in a substantially fan shape as will be described later, and the front and back surfaces constituting the main surface are arranged perpendicular to the axial direction of the motor 2. ing.
- the area of each main surface of the first and second power modules 51a and 51b is any side of the side surface of the outer edge portion, the side surface of the inner edge portion, and the side surface of the side edge portion connecting the outer edge portion and the inner edge portion. It is formed larger than the area.
- the winding ends 25a and 25b of the first and second stator windings 2a and 2b extend in the axial direction of the motor 2 toward the first and second power modules 51a and 51b. These winding ends 25a and 25b pass through the control board 3 and use the relay member 4 as a guide, while being connected to the winding connection terminals 52a and 52b of the first and second power modules 51a and 51b. , Each connected. Further, using the relay member 4 as a guide contributes to countermeasures against vibration of the winding.
- winding ends 25a and 25b of the first and second stator windings 2a and 2b do not pass through the control board 3 and pass through the peripheral edge of the control board 3 with the relay member 4 as a guide. And you may make it connect to each connection terminal 52a, 52b of 2nd power module 51a, 51b.
- the positions where the connection terminals 52a and 52b of the first and second power modules 51a and 51b and the winding ends 25a and 25b of the first and second stator windings 2a and 2b are connected are shown in FIG. Not only between the relay member 4 shown and the first and second power modules 51a and 52b, but also between the control board 3 and the relay member 4, or between the first and second stator windings 2a and 2b.
- connection positions can be arbitrarily selected in consideration of the assembling property of the electric power steering apparatus.
- the CPU 31 in the control device 6 calculates a control amount corresponding to the current supplied to the motor 2, and outputs a control signal based on the calculation result.
- the control signal output from the CPU 31 is transmitted to the first and second power modules 51a and 51b via the first control terminal 53a and the second control terminal 53b, respectively. Further, as will be described later, the terminal voltage and current of the motor 2 are transmitted from the first and second power modules 51a and 51b to the CPU 31 via the connection terminals 53a and 53b, and the CPU 31 monitors them. Is configured to do.
- the heat sink 5 is disposed in the motor axial direction with respect to the motor and has a plane extending in a direction perpendicular to the motor axial direction.
- a gear portion 8 that transmits assist torque from the motor 2 to the handle or the tire is fixed in close contact with one end surface (upper end surface in FIG. 1) of the heat sink 5, and the other end surface in the axial direction (FIG. 1).
- the main surfaces of the first and second power modules 51a and 51b are fixed in close contact with the flat surface on the lower end surface.
- the main surface of the power modules 51a and 51b means a surface that has the largest surface area and spreads in a substantially planar manner among the outer surfaces of the power module, and a so-called surface or back surface other than the side surface corresponds to this. To do.
- the heat generated by the operation of the first and second power modules 51 a and 51 b is radiated through the heat sink 5 and is also transmitted to the gear portion 8 through the heat sink 5 to be radiated. Therefore, it is desirable that the heat sink 5 be made of a material with good heat dissipation, for example, aluminum.
- a bearing 81 is fixed to the center of the heat sink 5. The bearing 81 rotatably supports the output shaft 24 of the motor 2 and plays a role of positioning the axis of the output shaft 24.
- the relay member 4 includes a first protrusion 41a and a second protrusion 41b for bringing the first and second power modules 51a and 51b into close contact with the heat sink 5, respectively.
- 51b is provided correspondingly.
- These first and second protrusions 41a and 41b press the first and second power modules 51a and 51b toward the heat sink 5 so that the first and second power modules 51a and 51b are pressed against the heat sink 5. Adhere to.
- FIG. 2 is a plan view of a relay member in the electric power steering apparatus according to Embodiment 1 of the present invention
- FIG. 3 is a cross-sectional view taken along the line AA in FIG. 1 to 3, the relay member 4 has a substantially circular shape as shown in FIG. 2 and is entirely made of an insulating resin.
- first and second protrusions 41a and 41b Three each of the first and second protrusions 41a and 41b described above are provided, and the first protrusions 41a are vertically arranged on the left side of FIG.
- the second protrusions 41b are vertically aligned with respect to the center of the relay member 4 on the right side of FIG.
- a plurality of leg portions 42 each projecting in the axial direction are provided on both end surfaces of the relay member 4 in the axial direction.
- four leg portions 42 provided on the end surface of the relay member 4 on the control board 3 side are further formed with cylindrical portions 421 extending in the axial direction.
- the cylindrical portion 421 is inserted into a hole provided in the control board 3 to position and support the control board 3.
- a plurality of first conductors 48a connected to the first power module 51a and a plurality of second conductors 48b connected to the second power module 51b are embedded.
- a part of the plurality of first conductors 48a embedded in the relay member 4 becomes a plurality of first conductor terminals 46a that are exposed from the cutout portions of the relay member 4 and connected to the first power module 51a.
- a part of the plurality of second conductors 48b embedded in the relay member 4 is a part of the plurality of second conductors that are partially exposed from the notch of the relay member 4 and connected to the second power module 51b.
- the plurality of first conductors 48a and the plurality of second conductors 48b embedded in the relay member 4 respectively become a power line connected to a power source such as a battery and a ground line connected to the ground level of the vehicle. .
- a central hole 401 provided in the central portion of the relay member 4 is penetrated by the output shaft 24 of the motor 2, and a guide portion 43 is formed around the central hole 401.
- the guide portion 43 is provided with a plurality of first and second small holes 49a and 49b penetrating in the axial direction. In these small holes 49a, 49b, conductor pins from the first and second power modules 51a, 51b are inserted.
- first and second screen-shaped guides 44a and 44b as guide portions each having a plurality of rectangular holes 45a and 45b through which the winding ends 25a and 25b pass are arranged at both end edges of the relay member 4, respectively. ing.
- the rectangular holes 45a and 45b described above are provided in three pieces each. By passing the winding ends 25a and 25b through the rectangular holes 45a and 45b, respectively, guides for the winding ends 25a and 25b are provided. Positioning is performed.
- a part of the relay member 4 is provided with a plurality of conductor pins 47 that lead to electrical wiring from the vehicle, such as sensor signals, power sources, and ground lines, protruding in the axial direction.
- the control device 6 is disposed between the motor 2 and the gear portion 8 in the axial direction of the motor 2, and the output shaft 24 of the motor 2 passes through the center of the control device 6. .
- the assembly order of the electric power steering apparatus 1 configured in this way is as follows. First, the relay member 4 and the first and second power modules 51a and 51b are stacked, and the control board 3 is further stacked thereon to control the control apparatus 6. After assembling and assembling the control device 6 in the axial direction of the motor 2, the housing 7 and the heat sink 5 are assembled, and finally the gear portion 8 is integrated.
- the control board 3, the relay member 4, and the first and second power modules 51 a and 51 b are sequentially stacked on the motor 2, and then the housing 7 and the heat sink 5 are stacked. It is also possible to attach the gear portion 8 and finally attach the gear portion 8. Furthermore, when the housing 7 is divided into a plurality of parts, the first and second power modules 51a and 51b are mounted on the upper part of the heat sink 5 (lower part of the heat sink in FIG. 1), and then the relay member 4 and After assembling the control board 3 and connecting it to the motor 2, the housing 7 and the gear portion 8 may be assembled.
- FIG. 4 is a circuit configuration diagram of the electric power steering apparatus according to Embodiment 1 of the present invention.
- an electric power steering apparatus 1 according to Embodiment 1 of the present invention includes a motor 2 that generates a driving force for assisting a driver's steering force, and a first inverter circuit 511a as a first driving circuit.
- the second inverter circuit 511b as the second drive circuit, the CPU 31 mounted on the control board 3, the battery 12 mounted on the vehicle, and the power supply from the battery 12 to the first inverter circuit 511a.
- a first relay 54a configured by a field effect transistor (hereinafter referred to as FET) to be controlled
- a second relay 54b configured by an FET for controlling power supply from the battery 12 to the second inverter circuit 511b.
- sensors 11 for detecting the driver's steering torque, vehicle speed, and the like.
- Reference numerals 25a and 25b denote winding ends of the first and second stator windings 2a and 2b described in FIG.
- the first inverter circuit 511a is built in the first power module 51a, and includes switching elements T1a, T2a, T3a, T4a, T5a, T6a as three power elements made of FETs, and three shunt resistors. It is constituted by Rua, Rva, Rwa and one smoothing capacitor C1a.
- the switching elements T1a, T3a, T5a are inserted into the U-phase upper arm, the V-phase upper arm, and the W-phase upper arm of the three-phase bridge circuit, respectively, and the switching elements T2a, T4a, T6a are It is inserted into the U-phase lower arm, V-phase lower arm, and W-phase lower arm of the three-phase bridge circuit.
- Shunt resistors Rua, Rva, Rwa provided for motor current detection described later are respectively connected between the switching elements T2a, T4a, T6a and the ground level of the vehicle.
- a smoothing capacitor C1a connected between the common connection portion of the switching elements T1a, T3a, T5a and the ground level of the vehicle is provided to smooth the power supply voltage supplied to the first inverter circuit 511a. .
- the U-phase AC terminal which is a series connection portion of the switching element T1a and the switching element T2a, is connected to the U-phase terminal of the first stator winding 2a of the motor 2, and the series connection of the switching element T3a and the switching element T4a.
- the V-phase AC terminal which is a part is connected to the V-phase terminal of the first stator winding 2a
- the W-phase AC terminal which is a series connection part of the switching element T5a and the switching element T6a is the first stator. It is connected to the W-phase terminal of the winding 2a.
- One end of the upper arm of each phase of the three-phase bridge circuit configured by the switching elements T1a, T3a, and T5a is commonly connected to each other to form the positive-side DC terminal of the first inverter circuit 511a. It is connected to the positive terminal of the battery 12 through the relay 54a.
- one end of the lower arm of each phase of the three-phase bridge circuit configured by the switching elements T2a, T4a, and T6a constitutes the negative DC terminal of the first inverter circuit 511a, and the shunt resistors Rua, Rva, It is connected to the ground level of the vehicle via Rwa.
- the second inverter circuit 511b is built in the second power module 51b, and includes switching elements T1b, T2b, T3b, T4b, T5b, T6b as three power elements composed of FETs and three shunt resistors. It is configured by Rub, Rvb, Rwb and one smoothing capacitor C1b.
- the switching elements T1b, T3b, T5b are inserted into the U-phase upper arm, the V-phase upper arm, and the W-phase upper arm of the three-phase bridge circuit, respectively, and the switching elements T2b, T4b, T6b are It is inserted into the U-phase lower arm, V-phase lower arm, and W-phase lower arm of the three-phase bridge circuit.
- the shunt resistors Rub, Rvb, Rwb provided for detecting the motor current are respectively connected between the switching elements T2b, T4b, T6b and the ground level of the vehicle.
- a smoothing capacitor C1b connected between the common connection portion of the switching elements T1b, T3b, T5b and the ground level of the vehicle is provided to smooth the power supply voltage supplied to the second inverter circuit 511b. .
- the U-phase AC terminal which is a series connection portion of the switching element T1b and the switching element T2b, is connected to the U-phase terminal of the second stator winding 2b of the motor 2, and the switching element T3b and the switching element T4b are connected in series.
- the V-phase AC terminal which is a part is connected to the V-phase terminal of the second stator winding 2b
- the W-phase AC terminal which is a series connection part of the switching element T5b and the switching element T6b is the second stator. It is connected to the W-phase terminal of the winding 2b.
- One end of the upper arm of each phase of the three-phase bridge circuit configured by the switching elements T1b, T3b, and T5b is commonly connected to each other to form the positive-side DC terminal of the second inverter circuit 511b. It is connected to the positive terminal of the battery 12 through the relay 54b.
- one end of the lower arm of each phase of the three-phase bridge circuit configured by the switching elements T2b, T4b, and T6b constitutes the negative DC terminal of the second inverter circuit 511b, and the shunt resistors Rub, Rvb, It is connected to the ground level of the vehicle via Rwb.
- the CPU 31 mounted on the control board 3 calculates a control amount corresponding to the target current value for driving the motor 2 based on information from the sensors 11 mounted on the vehicle, and the calculated control amount is sent via the line 32.
- the gates of the switching elements of the first and second inverter circuits 511a and 511b are PWM-controlled.
- the motor 2 is driven by three-phase AC power that is PWM-controlled by the first inverter circuit 511a and the second inverter circuit 511b, generates a desired assist torque, and the steering shaft ( (Not shown).
- the target current control amount calculated by the CPU 31 is distributed to the first inverter circuit 511a and the second inverter circuit 511b, and the current amount is changed between the first stator winding 2a and the second stator winding 2b. to share the load. This sharing ratio can be arbitrarily set.
- the voltage Mwa is input to the CPU 31 via the signal line 33, respectively.
- the V-phase motor current Iva and the W-phase motor current Iwa are input to the CPU 31 via the signal line 33.
- the W-phase terminal voltage Mwb is input to the CPU 31 via the signal line 33, respectively.
- the V-phase motor current Ivb and the W-phase motor current Iwb are input to the CPU 31 via the signal line 33.
- the first stator winding 2a and the first The amount of current in the second stator winding 2b is controlled to cause the motor 2 to generate a desired assist torque. That is, the CPU 31 calculates the target current control amount of the motor 2 based on the information such as the steering torque and the vehicle speed by the driver input from the sensors 11 as described above, and the above-described target current control amount with respect to the calculated target current control amount.
- a gate signal corresponding to the sharing amount is applied to the gate of each switching element of the first inverter circuit 511a via the signal line 32, and these switching elements are PWM-controlled.
- a gate signal corresponding to the above-mentioned share of the calculated target current control amount is given to the gates of the respective switching elements of the second inverter circuit 511b via the signal line 32, and these switching elements are supplied. PWM control is performed.
- the motor 2 includes a first stator winding 2a energized by three-phase AC power PWM-controlled by the first inverter circuit 511a, and three-phase AC power PWM-controlled by the second inverter circuit 511b. Driven by the biased second stator winding 2b, an assist torque corresponding to the driver's steering torque and vehicle speed is generated and applied to a steering shaft (not shown).
- the opening and closing of the first and second relays 54a and 54b is controlled by a command from the CPU 31, and only one of the first inverter circuit 511a and the second inverter circuit 511b is selected to select the motor 2. It is also possible to drive the other system and put the other system in a resting state.
- FIG. 5 is a plan view of the inside of the control device showing the arrangement of the power module in the electric power steering apparatus according to Embodiment 1 of the present invention, and the other end surface of the heat sink 5 (the lower side of FIG. 1). A state is shown in which the first and second power modules 51a and 51b are in close contact with each other and fixed to a plane on the end face side.
- the above-described first and second relays 54a and 54b are mounted on the heat sink 5.
- the first and second power modules 51a and 51b and the first and second relays 54a and 54b generate a large amount of heat by flowing a large current, and cannot flow a large current unless the heat dissipation effect is increased.
- the entire control device 6 is arranged at the upper part of the motor 2 in FIG. 1, each component constituting the control device 6 is integrally fixed to the motor 2, and the heat sink 5 having a substantially circular shape is controlled by It is fixed to the housing 7 of the device 6.
- the first power module 51a and the second power module 51b are equally disposed on both sides of the center of the heat sink 5 with the center in between.
- the first and second power modules 51 a and 51 b are substantially fan-shaped along the outer shape of the heat sink 5 in order to increase the contact area with the heat sink 5.
- the outer edge portions 512a and 512b of the first and second power modules 51a and 51b are formed in a straight line shape in which a circular arc is partially cut out to draw out the winding connection terminals 52a and 52b.
- the outer edge portions extending from both sides to the both sides are formed in an arc shape, and the inner edge portions 513a and 513b of the first and second power modules 51a and 51b are along the center hole 501 of the heat sink 5 that penetrates the output shaft 24. It has an arc shape, and twelve control terminals 57a and 57b are drawn out.
- side surface portions 514a and 514b connecting the outer edge portions 512a and 512b and the inner edge portions 513a and 513b of the first and second power modules 51a and 51b are straight along a straight line extending radially from the center portion of the heat sink 5. It is formed in a shape.
- the two power supply line connection terminals 56a of the first power module 51a and the three resistance connection terminals 55ua, 55va, and 55wa connected to the shunt resistors Rua, Rva, and Rwa, respectively, are side portions of the power module 51a. It is drawn from 514a.
- the two power supply line connection terminals 56b of the second power module 51b and the three resistance connection terminals 55ub, 55vb, and 55wb connected to the shunt resistors Rub, Rvb, and Rwb, respectively, are side portions of the power module 51b. It is drawn from 514b.
- One of the two power supply line connection terminals 56a and 56b of each of the first and second power modules 51a and 51b is respectively connected to a part of the conductors 46a and 46b that become power supply lines embedded in the relay member 4.
- the other is connected to a portion of the conductors 46a and 46b that become ground lines embedded in the relay member 4 via smoothing capacitors C1a and C1b.
- the first and second relays 54a and 54b as electronic relays are molded in a substantially fan shape by a resin mold member, and are arranged between the first and second power modules 51a and 51b formed in a substantially fan shape, respectively.
- the heat sink 5 is fixed in close contact with a flat surface on the other end surface (lower end surface in FIG. 1).
- the side portions 541a on both sides of the first relay 54a formed in a straight line have an input side terminal 61a connected to one of the conductors 46a serving as a power supply line embedded in the relay member 4, and a first An output terminal 62a connected to one of the power supply line connection terminals 56a of the power module 51a is drawn out, and a control terminal 63a is drawn out at the inner edge.
- the side portions 541b on both sides of the second relay 54b formed in a straight line have an input side terminal 61b connected to one of the conductors 46b to be a power line embedded in the relay member 4, and a second side An output side terminal 62b connected to one of the power supply line connection terminals 56b of the power module 51b is drawn out, and a control terminal 63b is drawn out at the inner edge.
- a plurality of flanges 58 having screw holes are dispersed and arranged on the peripheral edge of the heat sink 5.
- a part of these collar parts 58 is a collar part for fixing the heat sink 5 to the gear part 8, and the other part is a collar part for fixing the motor 2 and the control device 6.
- the outer shapes of the first and second power modules 51a and 51b are formed in a substantially fan shape in order to effectively take a cooling area, and the connection terminals and the like are not arranged in one place. Not distributed.
- the control terminals 57a and 57b that are separated by the magnitude of the current capacity and through which a small current flows are collectively arranged at the inner edge portions 513a and 513b.
- switching elements as power elements in the first and second power modules 51a and 51b will be described.
- FIG. 2 to FIG. 4 six FETs each connected to the upper arm and the lower arm of each phase connected to the winding ends 25a and 25b of the first and second stator windings 2a and 2b, respectively.
- Each of the switching elements T1a to T6a and T1b to T6b has been described as being built in one package to form the first and second power modules 51a and 51b.
- the circuit built in the power module is described below. Various forms are possible as described.
- FIG. 6 is a circuit diagram of a power module in the electric power steering apparatus according to Embodiment 1 of the present invention.
- (a) shows a case where only two switching elements T1 and T2 made up of a pair of upper and lower arm FETs for each phase are built in one power module.
- (B) is one power module including three switching elements T1, T2, and T3 made of FETs, and one switching element T3 includes winding ends 25a of the motor 2, 25b and a connection point between the switching elements T1 and T2 of the pair of upper and lower arms.
- the switching element T3 can control the connection between the winding ends 25a and 25b of the motor 2 and the switching elements T1 and T2 of the upper and lower arms, and is so-called a motor relay.
- (C) is one in which switching elements T1 and T2 composed of a pair of upper and lower FETs and a shunt resistor R for current detection are built in one power module.
- (D) shows a single power module incorporating switching elements T1 to T4 composed of two pairs of upper and lower FETs.
- the power module of the type shown in (d) can particularly constitute an H-bridge and is suitable for controlling a brushed motor.
- switching elements which are a plurality of power elements, in consideration of the type and function of the motor, it is possible to take various forms of power modules.
- the ⁇ marks indicate terminals derived from the power module.
- the first and second relays 54a and 54b as electronic relays can be power-modulated, and a plurality of FETs equivalent to those for motors can be connected in parallel.
- the chip can be mounted on the same substrate, and can be a single component in appearance.
- a power module is provided with a plurality of power elements.
- FIG. The first embodiment described above shows a case in which the control device is mounted in the motor output direction, that is, the front side of the motor. More specifically, the control device, the heat sink, and the gear portion are arranged in that order on the front side of the motor.
- 1 shows an electric power steering apparatus in which these are sequentially arranged in the axial direction of the motor, and these are integrated.
- the electric power steering apparatus according to the second embodiment of the present invention described below is in the opposite output direction of the motor, that is, the motor
- the control unit is mounted on the rear side of the motor. More specifically, the heat sink and the control unit are arranged side by side in the order of the motor in the order on the rear side of the motor, and these are fixed integrally.
- the gear portion is juxtaposed in the axial direction of the motor on the front side of the motor, and these are fixed integrally.
- FIG. 7 is a cross-sectional view of an electric power steering apparatus according to Embodiment 2 of the present invention.
- the control device 6 is arranged and mounted in the axial direction of the motor 2 on the opposite output direction of the motor 2, that is, on the rear side which is the opposite front side of the motor 2.
- the electric power steering apparatus 1 includes a motor 2, a heat sink 5, a control device 6, and a gear unit 8, and the control device 6 and the heat sink 5 are arranged in the axial direction of the motor 2.
- the motor 2 and the gear portion 8 are integrated in parallel in that order.
- the control device 6 includes first and second power modules 51 a and 51 b fixed in close contact with the end surface of the heat sink 5 fixed to the rear side of the motor 2, the relay member 4, and the control board 3. They are stacked and assembled in order.
- the relay member 4 is formed with first and second protrusions 41a and 41b.
- the first and second power modules 51a and 51b are pressed against the heat sink 5 by the first and second protrusions 41a and 41b.
- the winding connection terminals 52a and 52b of the first and second power modules 51a and 51b are respectively connected to the winding ends 25a and 25b of the first and second stator windings 2a and 2b of the motor 2 that penetrate the heat sink 5. Connected to.
- the front bracket 9 of the motor 2 has a structure capable of assembling the gear portion 8 and the yoke 23 of the motor 2 as well as fixing the bearing 82 that rotatably supports the output shaft 24.
- the major difference from the first embodiment is that the lead-out directions of the winding ends 25a and 25b of the first and second stator windings 2a and 2b of the motor 2 are different from those in the first embodiment.
- the second power modules 51a and 51b, the relay member 4, and the connection methods of the winding ends 25a and 25b are different.
- the winding ends 25a and 25b of the motor 2 are connected to the first and second power modules 51a and 51b via the control board 3 and the screen-shaped guides 44a and 44b of the relay member 4, respectively. It was connected to each winding connection terminal 52a, 52b, or connected to each winding connection terminal 52a, 52b of the first and second power modules 51a, 51b via a conductor in the relay member 4. However, in the configuration of the second embodiment, the winding ends 25a and 25b of the motor 2 can be directly connected to the respective winding connection terminals 52a and 52b of the first and second power modules 51a and 51b.
- the through hole of the heat sink 5 serves as a guide for the winding ends 25a and 25b, and a non-conductive bush between the through hole and the winding is interposed to ensure insulation from the heat sink 5 and to prevent vibration of the winding.
- the heat sink 5 is in contact with the yoke 23 of the motor 2, and the heat of the heat sink 5 is also transferred to the yoke 23. On the contrary, when the heat generation of the motor 2 is larger, the heat on the motor 2 side can be transmitted to the heat sink 5.
- the winding ends 25a and 25b of the first and second stator windings 2a and 2b pass through the heat sink 5 and are connected to the first and second power modules 51a and 51b. You may make it connect to each coil
- the control device is driven by the motor using the same component configuration as in the first embodiment in which the control device is arranged on the front side of the motor.
- the control device is arranged on the rear side, it is possible to design based on the same basic structure as in the first embodiment and to share some parts. Further, there is no need to provide a hole for penetrating the output shaft of the motor in the heat sink, the relay member, and the control board, and the area of each component can be effectively used.
- Embodiment 3 FIG.
- the switching elements as the power elements through which a large current made of FET flows are respectively provided for the two independent systems each including the first and second stator windings.
- the first power module and the second power module are equally divided into heat sinks for each system and arranged in the vicinity of the winding ends of the corresponding stator windings.
- the shunt resistor corresponding to each power module is arranged in the vicinity of.
- the power elements are not divided into control systems. From the viewpoint of heat dissipation, it may be advantageous to arrange power elements of other control systems in a mixed manner at the winding ends of the control system.
- the power elements are not divided for each control system, but are divided and arranged by mixing power elements of other control systems at the winding ends of the respective control systems.
- the so-called mixed arrangement is used.
- the switching elements T1a and T2a of the upper and lower arms of the first inverter circuit 511a, T3a and T4a, and T5a and T6a are each configured as a pair
- the switching elements T1b of the upper and lower arms of the second inverter circuit 511b T2b, T3b and T4b, and T5b and T6b are each configured as a pair
- a power module is configured for each of these pairs.
- each pair of switching elements T1a and T2a, and T3a and T4a of the first inverter circuit 511a, and a pair of switching elements T1b and T2b of the second inverter circuit 511b there are six switching elements in the vicinity of each pair of switching elements T1a and T2a, and T3a and T4a of the first inverter circuit 511a, and a pair of switching elements T1b and T2b of the second inverter circuit 511b.
- the U-phase and V-phase winding ends 25a of the first stator winding 2a of the motor 2 and the U of the second stator winding 2b are arranged. Phase winding points 25b are mixed and extended.
- each pair of switching elements T3b and T4b and T5b and T6b of the second inverter circuit 511b and a pair of switching elements T5a and T6a of the first inverter circuit 511a there are six switching elements in the vicinity of each pair of switching elements T3b and T4b and T5b and T6b of the second inverter circuit 511b and a pair of switching elements T5a and T6a of the first inverter circuit 511a.
- the V-phase and W-phase winding ends 25b of the second stator winding 2b of the motor 2 and the W of the first stator winding 2a are arranged.
- Phase winding points 25a are mixed and extended.
- the number of power modules is not two for each control system, but can be two power modules for each mixed arrangement described above, but divided into three or more.
- the degree of freedom in mounting becomes higher.
- a power module may be formed for each pair of two switching elements, or one power is generated by the pair of switching elements T1a and T2a and the pair of T3a and T4a of the first inverter circuit 511a.
- one power module with a pair of switching elements T1b and T2b of the second inverter circuit 511b, and one pair of switching elements T3b and T4b and a pair of T5b and T6b of the second inverter circuit 511b
- a power module may be used, and a pair of switching elements T5a and T6a of the first inverter circuit 511a may be used as one power module.
- four power modules are provided, but the aforementioned mixed arrangement can be easily performed.
- Embodiment 3 of the present invention there is a difference in the control amount between both control systems by arranging power elements such as switching elements of different control systems in a mixed manner. In this case, the heat distribution can be better and equalized.
- FIG. 8 is a partial cross-sectional view showing the electric power steering apparatus according to Embodiment 1 of the present invention.
- an electric power steering apparatus 1 mainly includes a motor 2 for assisting a driver's steering force, a heat sink 5 for cooling first and second power modules 51a and 51b described later, A control device 6 that controls the motor 2 and a gear unit 8 that decelerates the output of the motor 2 and transmits it to a steering shaft (not shown).
- the motor 2, the control device 6, the heat sink 5, and the gear unit 8 are sequentially arranged and integrated in the direction in which the axis of the motor 2 extends (hereinafter referred to as the axial direction).
- the motor 2 includes a stator 21 having a laminated core around which a first stator winding 2a connected in a three-phase delta connection and a second stator winding 2b connected in a three-phase delta connection are wound.
- a rotor 22 inserted into the central space of the rotor 21, an output shaft 24 disposed at the center of the rotor 22, and a yoke 23 that houses the stator 21, the rotor 22, and the output shaft 24 therein. And is composed of.
- the first and second stator windings 2a and 2b form two stator windings independent of each other.
- the first stator winding 2a and a first inverter circuit 511a as a first drive circuit to be described later constitute a first control system of the motor 2, and the second stator winding 2b and a first stator circuit to be described later.
- the second inverter circuit 511 b as the second drive circuit constitutes a second control system of the motor 2.
- the control device 6 includes a control board 3 on which a microcomputer (hereinafter referred to as a CPU) 31 is mounted, and a first power module 51 a and a second power module 51 b that are two independent power modules in contact with the heat sink 5.
- a relay member 4 that is interposed between the heat sink 5 and the control board 3 and that opposes them at a predetermined interval, the control board 3, the first and second power modules 51a and 51b, and the relay member 4.
- a housing 7 for storing the inside.
- the first and second power modules 51a and 51b described above are formed in, for example, a substantially fan shape, and the extending direction of the maximum outer dimension, that is, the extending direction of the front and back surfaces constituting the main surface is the axis of the motor 2 It is arranged perpendicular to the direction.
- the area of each main surface of the first and second power modules 51a and 51b is any side of the side surface of the outer edge portion, the side surface of the inner edge portion, and the side surface of the side edge portion connecting the outer edge portion and the inner edge portion. It is formed larger than the area.
- the winding ends 25a and 25b of the first and second stator windings 2a and 2b extend in the axial direction of the motor 2 toward the first and second power modules 51a and 51b. These winding ends 25a and 25b pass through the control board 3 and use the relay member 4 as a guide, while being connected to the winding connection terminals 52a and 52b of the first and second power modules 51a and 51b. , Each connected.
- the first and second winding ends 25a, 25b do not pass through the control board 3 but pass through the peripheral edge of the control board 3 and use the relay member 4 as a guide to guide the first and second power modules 51a, You may make it connect to each connection terminal 52a, 52b of 51b. Further, the positions where the connection terminals 52a and 52b of the first and second power modules 51a and 51b and the winding ends 25a and 25b of the first and second stator windings 2a and 2b are connected are shown in FIG. Not only between the relay member 4 shown and the first and second power modules 51a and 52b, but also between the control board 3 and the relay member 4, or between the first and second stator windings 2a and 2b.
- connection positions thereof can be arbitrarily selected.
- the CPU 31 in the control device 6 calculates a control amount corresponding to the current supplied to the motor 2, and outputs a control signal based on the calculation result.
- the control signal output from the CPU 31 is transmitted to the first and second power modules 51a and 51b via the first control terminal 53a and the second control terminal 53b, respectively. Further, as will be described later, the terminal voltage and current of the motor 2 are transmitted from the first and second power modules 51a and 51b to the CPU 31 via the connection terminals 53a and 53b, and the CPU 31 monitors them. Is configured to do.
- the heat sink 5 is disposed in the axial direction with respect to the motor, and includes a plane extending in a direction perpendicular to the axial direction of the motor.
- a gear portion 8 that transmits assist torque from the motor 2 to the handle or the tire is fixed in close contact with one end surface (upper end surface in FIG. 1) of the heat sink 5, and the other end surface in the axial direction (FIG. 1).
- the main surfaces of the first and second power modules 51a and 51b are fixed in close contact with the flat surface on the lower end surface.
- the heat generated by the operation of the first and second power modules 51 a and 51 b is radiated through the heat sink 5 and is also transmitted to the gear portion 8 through the heat sink 5 to be radiated. Therefore, it is desirable that the heat sink 5 be made of a material with good heat dissipation, for example, aluminum.
- a bearing 81 is fixed to the center of the heat sink 5. The bearing 81 rotatably supports the output shaft 24 of the motor 2 and plays a role of positioning the axis of the output shaft 24.
- the relay member 4 includes a first protrusion 41a and a second protrusion 41b for bringing the first and second power modules 51a and 51b into close contact with the heat sink 5, respectively.
- 51b is provided correspondingly.
- These first and second protrusions 41a and 41b press the first and second power modules 51a and 51b toward the heat sink 5 so that the first and second power modules 51a and 51b are pressed against the heat sink 5. Adhere to.
- FIG. 9 is a circuit configuration diagram of the electric power steering apparatus according to Embodiment 1 of the present invention.
- an electric power steering apparatus 1 according to Embodiment 1 of the present invention includes a motor 2 that generates a driving force for assisting a steering force of a driver, and a first inverter circuit 511a as a first driving circuit.
- a first relay 54a configured by a field effect transistor (hereinafter referred to as an FET) that controls power supply, and an FET that controls power supply from the battery 12 to the second inverter circuit 511b.
- a second relay 54b and sensors 11 for detecting the steering torque, vehicle speed, etc. of the driver are provided.
- Reference numerals 25a and 25b denote winding ends of the first and second stator windings 2a and 2b described in FIG.
- the first inverter circuit 511a is built in the first power module 51a, and includes switching elements T1a, T2a, T3a, T4a, T5a, T6a as three power elements made of FETs, and three shunt resistors. It is constituted by Rua, Rva, Rwa and three smoothing capacitors C1a, C2a, C3a.
- the switching elements T1a, T3a, T5a are inserted into the U-phase upper arm, the V-phase upper arm, and the W-phase upper arm of the three-phase bridge circuit, respectively, and the switching elements T2a, T4a, T6a are It is inserted into the U-phase lower arm, V-phase lower arm, and W-phase lower arm of the three-phase bridge circuit.
- Shunt resistors Rua, Rva, Rwa provided for motor current detection described later are respectively connected between the switching elements T2a, T4a, T6a and the ground level of the vehicle.
- Smoothing capacitors C1a, C2a, C3a connected between the common connection of the switching elements T1a, T3a, T5a and the ground level of the vehicle are for smoothing the power supply voltage supplied to the first inverter circuit 511a. Is provided.
- the U-phase AC terminal which is a series connection portion of the switching element T1a and the switching element T2a, is connected to the U-phase terminal of the first stator winding 2a of the motor 2, and the series connection of the switching element T3a and the switching element T4a.
- the V-phase AC terminal which is a part is connected to the V-phase terminal of the first stator winding 2a
- the W-phase AC terminal which is a series connection part of the switching element T5a and the switching element T6a is the first stator. It is connected to the W-phase terminal of the winding 2a.
- One end of the upper arm of each phase of the three-phase bridge circuit configured by the switching elements T1a, T3a, and T5a is commonly connected to each other to form the positive-side DC terminal of the first inverter circuit 511a.
- the relay 54a and the choke coil 13 for preventing noise from flowing to other devices are connected to the positive terminal of the battery 12.
- one end of the lower arm of each phase of the three-phase bridge circuit configured by the switching elements T2a, T4a, and T6a constitutes the negative DC terminal of the first inverter circuit 511a, and the shunt resistors Rua, Rva, It is connected to the ground level of the vehicle via Rwa.
- the second inverter circuit 511b is built in the second power module 51b, and includes switching elements T1b, T2b, T3b, T4b, T5b, T6b as three power elements composed of FETs and three shunt resistors. It is configured by Rub, Rvb, Rwb and three smoothing capacitors C1b, C2b, C3b.
- the switching elements T1b, T3b, T5b are inserted into the U-phase upper arm, the V-phase upper arm, and the W-phase upper arm of the three-phase bridge circuit, respectively, and the switching elements T2b, T4b, T6b are It is inserted into the U-phase lower arm, V-phase lower arm, and W-phase lower arm of the three-phase bridge circuit.
- the shunt resistors Rub, Rvb, Rwb provided for detecting the motor current are respectively connected between the switching elements T2b, T4b, T6b and the ground level of the vehicle.
- the U-phase AC terminal which is a series connection portion of the switching element T1b and the switching element T2b, is connected to the U-phase terminal of the second stator winding 2b of the motor 2, and the switching element T3b and the switching element T4b are connected in series.
- the V-phase AC terminal which is a part is connected to the V-phase terminal of the second stator winding 2b
- the W-phase AC terminal which is a series connection part of the switching element T5b and the switching element T6b is the second stator. It is connected to the W-phase terminal of the winding 2b.
- each phase of the three-phase bridge circuit configured by the switching elements T1b, T3b, and T5b is commonly connected to each other to form the positive-side DC terminal of the second inverter circuit 511b.
- the relay 54 b and the choke coil 13 are connected to the positive terminal of the battery 12.
- one end of the lower arm of each phase of the three-phase bridge circuit configured by the switching elements T2b, T4b, and T6b constitutes the negative-side DC terminal of the second inverter circuit 511b, and the shunt resistor shunt resistor Rub, It is connected to the ground level of the vehicle via Rvb and Rwb.
- the CPU 31 mounted on the control board 3 calculates a control amount corresponding to the target current value for driving the motor 2 based on information from the sensors 11 mounted on the vehicle, and the calculated control amount is sent via the line 32.
- the gates of the switching elements of the first and second inverter circuits 511a and 511b are PWM-controlled.
- the motor 2 is driven by three-phase AC power that is PWM-controlled by the first inverter circuit 511a and the second inverter circuit 511b, generates a desired assist torque, and the steering shaft ( (Not shown).
- the target current control amount calculated by the CPU 31 is distributed to the first inverter circuit 511a and the second inverter circuit 511b, and the current amount is changed between the first stator winding 2a and the second stator winding 2b. to share the load. This sharing ratio can be arbitrarily set.
- the voltage Mwa is input to the CPU 31 via the signal line 33, respectively.
- the V-phase motor current Iva and the W-phase motor current Iwa are input to the CPU 31 via the signal line 33.
- the W-phase terminal voltage Mwb is input to the CPU 31 via the signal line 33, respectively.
- the V-phase motor current Ivb and the W-phase motor current Iwb are input to the CPU 31 via the signal line 33.
- the first stator winding 2a and the second The amount of current in the second stator winding 2b is controlled to cause the motor 2 to generate a desired assist torque. That is, the CPU 31 calculates the target current control amount of the motor 2 based on the information such as the steering torque and the vehicle speed by the driver input from the sensors 11 as described above, and the above-described target current control amount with respect to the calculated target current control amount.
- a gate signal corresponding to the sharing amount is applied to the gate of each switching element of the first inverter circuit 511a via the signal line 32, and these switching elements are PWM-controlled.
- a gate signal corresponding to the above-mentioned share of the calculated target current control amount is given to the gates of the respective switching elements of the second inverter circuit 511b via the signal line 32, and these switching elements are supplied. PWM control is performed.
- the motor 2 driven in this manner generates assist torque corresponding to the driver's steering torque and vehicle speed, and is applied from the output shaft 24 to the steering shaft via the gear portion 8.
- the opening and closing of the first and second relays 54a and 54b is controlled by a command from the CPU 31, and only one of the first inverter circuit 511a and the second inverter circuit 511b is selected to select the motor 2. It is also possible to drive the other system and put the other system in a resting state.
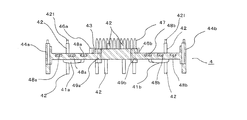
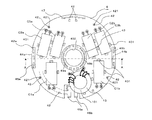
- FIG. 10 is a plan view of the relay member in the electric power steering apparatus according to Embodiment 4 of the present invention
- FIG. 11 is a cross-sectional view taken along the line AA in FIG. 8, 10, and 11, the relay member 4 has a substantially circular shape, as shown well in FIG. 10, and is entirely made of an insulating resin.
- a plurality of the first and second protrusions 41a and 41b are provided, and the first and second protrusions 41a and 41b are spaced from each other with respect to the first and second power modules 51a and 51b. Is provided.
- a plurality of leg portions 42 that protrude in the axial direction are provided on both side surface portions corresponding to both end surfaces in the axial direction of the relay member 4.
- four leg portions 42 provided on the surface portion on the control board 3 side in the relay member 4 are further formed with cylindrical portions 421 extending in the axial direction. The cylindrical portion 421 is inserted into a hole provided in the control board 3 to position and support the control board 3.
- a plurality of first conductors 48a connected to the first power module 51a and a plurality of second conductors 48b connected to the second power module 51b are embedded.
- a part of the plurality of first conductors 48a embedded in the relay member 4 becomes a plurality of first power supply terminals 46a that are exposed from the cutout portions of the relay member 4 and connected to the first power module 51a.
- a plurality of second power sources 48b embedded in the relay member 4 are partially exposed from the cutout portions of the relay member 4 and connected to the second power module 51b. Terminal 46b.
- the plurality of first conductors 48a and the plurality of second conductors 48b embedded in the relay member 4 respectively become a power line connected to a power source such as a battery and a ground line connected to the ground level of the vehicle. .
- a central hole 402 provided in the central portion of the relay member 4 is penetrated by the output shaft 24 of the motor 2, and a guide portion 43 is formed around the central hole 402.
- the guide portion 43 is provided with a plurality of first and second small holes 49a and 49b penetrating in the axial direction. In these small holes 49a, 49b, conductor pins from the first and second power modules 51a, 51b are inserted.
- first and second partition-shaped guides 44a and 44b as guide portions each having a plurality of rectangular holes 45a and 45b through which the winding ends 25a and 25b pass are provided at both end edges of the relay member 4, respectively. ing.
- the rectangular holes 45a and 45b described above are provided in three pieces each. By passing the winding ends 25a and 25b through the rectangular holes 45a and 45b, respectively, guides for the winding ends 25a and 25b are provided. Positioning is performed.
- a part of the relay member 4 is provided with a plurality of conductor pins 47 that lead to electrical wiring from the vehicle, such as sensor signals, power sources, and ground lines, protruding in the axial direction.
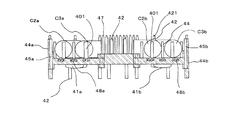
- the smoothing capacitors C2a and C3a of the first inverter circuit 511a described above are mounted on the relay member 4 in parallel with the center of the relay member 4 on the upper left side of FIG. It is arranged at the lower left part of FIG. 10 with respect to the center and is mounted on the relay member 4.
- the smoothing capacitors C2b and C3b of the second inverter circuit 511b are juxtaposed on the upper right side of FIG. 3 with respect to the center portion of the relay member 4 and mounted on the relay member 4, and the smoothing capacitor C1b is the center of the relay member 4 10 is mounted on the relay member 4 in the lower right portion of FIG.
- the choke coil 13 is configured by winding a conductor around the circumferential surface of the annular core 131 (FIG. 10 shows only a part of the winding). Implemented at the bottom of the.
- lead wires are extended from the choke coil 13 and the smoothing capacitors C1a, C2a, C3a, C1b, C2b, C3b, respectively. These lead wires are bent and inserted into holes provided in the relay member 4, and are electrically connected to the first and second conductors 48a and 48b exposed from the holes.
- the smoothing capacitors C1a, C2a, C3a, C1b, C2b, C3b, and the choke coil 13 are mounted on the surface of the relay member 4 on the side opposite to the heat sink.
- the first and second power modules 51a and 51 fixed to the heat sink 5 are hardly affected by the heat generated and have a thermally advantageous arrangement.
- the choke coil 13 is arranged in the vicinity of the first and second power supply terminals 46a and 46b because of the arrangement position on the circuit.
- each smoothing capacitor is arranged separately for each of the first and second inverter circuits 511a and 511b to which it belongs, and the U-phase, V-phase, and W-phase smoothing capacitors are arranged separately from each other. Yes.
- a large number of smoothing capacitors C1a, C2a, C3a, C1b, C2b, C3b and a choke coil 13 are fixed to the surface of the relay member 4 on the side opposite to the heat sink.
- the support column 401 is provided so as to extend in the axial direction.
- Each of the smoothing capacitors C1a, C2a, C3a, C1b, C2b, C3b, and the choke coil 13 is fixed and positioned by being sandwiched between these columns 401.
- three smoothing capacitors may be arranged in a set different from the above-described arrangement form with one set of three. Furthermore, if the smoothing capacitor is configured in a smaller size, there are an infinite number of arrangement methods, but the smoothing capacitor belonging to the first inverter circuit 511a and the smoothing capacitor belonging to the second inverter circuit 511b are arranged equally. Is desired. For example, a symmetrical arrangement with the output shaft 24 as the center or a symmetrical arrangement with respect to the center of the relay member 4 is desirable from the viewpoint of the center of gravity and the ease of wiring.
- the smoothing capacitors C1a, C2a, C3a, C1b, C2b, C3b, and the choke coil 13 generate less heat than the first and second power modules 51a, 51b, they also generate heat, so they are separated from the heat sink 5. It is desirable to arrange them evenly at the positions. As shown in FIGS. 10 and 11, the smoothing capacitors C1a, C2a, C3a, C1b, C2b, C3b, and the choke coil 13 are disposed substantially perpendicular to the surface of the relay member 4 with respect to the axial direction of the motor ( Hereinafter, this arrangement is referred to as horizontal placement).
- each smoothing capacitor and choke coil protruding in the axial direction of the relay member 4 can be shortened.
- the distance between the second power modules 51a and 51b and the control board 3 can also be shortened. That is, the smoothing capacitors C1a, C2a, C3a, C1b, C2b, C3b, and the choke coil 13 are preferably arranged so that the smaller one of the vertical and horizontal dimensions is directed in the axial direction.
- the smoothing capacitor and the choke coil which are electrical elements, are arranged between the relay member 4 and the control board 3, but all the smoothing capacitors and the choke coil are arranged between the relay member 4 and the heat sink 5. May be. However, in this case, it is desirable to provide an appropriate space between the smoothing capacitor and the choke coil in consideration of heat generation of the power modules 51a and 51b. Alternatively, a part of the smoothing capacitor and the choke coil are arranged between the relay member 4 and the control board 3, and the remaining smoothing capacitor is arranged between the relay member 4 and the heat sink 5. Is also possible.
- Each shunt resistor Rua, Rva, Rwa, Rub, Rvb, Rwb has a height dimension, that is, a maximum outer dimension, which is smaller than a height direction dimension, that is, the maximum outer dimension of the smoothing capacitor and the choke coil. You may mount on any surface of the relay member 4 above. Further, the shunt resistor is not one for each phase, but can be controlled even with a configuration in which a total of two shunt resistors are combined, or only one phase is deleted and two each.
- FIG. 8 shows a state in which the first and second power modules 51a and 51b are in close contact with and fixed to the plane of the heat sink 5 on the other end surface (the lower end surface in FIG. 8).
- first and second relays 54a and 54b are mounted on the heat sink 5, but are not illustrated in FIG.
- the first and second power modules 51a and 51b and the first and second relays 54a and 54b generate a large amount of heat by flowing a large current, and cannot flow a large current unless the heat dissipation effect is increased.
- the entire control device 6 is arranged at the upper part of the motor 2 in FIG. 8, each component constituting the control device 6 is integrally fixed to the motor 2, and the heat sink 5 having a substantially circular shape is controlled by the control device 6. It is fixed to the housing 7 of the device 6.
- the first power module 51a and the second power module 51b are equally disposed on both sides of the center of the heat sink 5 across the entire surface.
- the first and second power modules 51 a and 51 b are substantially fan-shaped along the outer shape of the heat sink 5 in order to increase the contact area with the heat sink 5.
- the first and second relays 54a and 54b as electronic relays are molded into a rectangular shape or a substantially fan shape by a resin molding member, and are respectively formed between the first and second power modules 51a and 51b formed in a substantially fan shape. It arrange
- first and second power modules 51a and 51b are formed by incorporating six switching elements T1a to T6a and T1b to T6b made of FETs in one package has been described.
- the circuit incorporated in the power module is not limited to various forms.
- the control device 6 is disposed between the motor 2 and the gear portion 8 in the axial direction of the motor 2, and the output shaft 24 of the motor 2 passes through the center of the control device 6. .
- the assembly order of the electric power steering apparatus 1 configured in this way is as follows. First, the relay member 4 and the first and second power modules 51a and 51b are stacked, and the control board 3 is further stacked thereon to control the control apparatus 6. After assembling and assembling the control device 6 in the axial direction of the motor 2, the housing 7 and the heat sink 5 are assembled, and finally the gear portion 8 is integrated.
- the control board 3, the relay member 4, and the first and second power modules 51 a and 51 b are sequentially stacked on the motor 2, and then the housing 7 and the heat sink 5 are stacked. It is also possible to attach the gear portion 8 and finally attach the gear portion 8. Furthermore, when the housing 7 is divided into a plurality of parts, the first and second power modules 51a and 51b are mounted on the upper part of the heat sink 5 (lower part of the heat sink in FIG. 8), and then the relay member 4 and After assembling the control board 3 and connecting it to the motor 2, the housing 7 and the gear portion 8 may be assembled.
- the control device 6 has a laminated structure of the heat sink 5, the first and second power modules 51a and 51b, the relay member 4, and the control board 3, and each of the power modules 51a and 51b having the largest heat generation. Is in close contact with the heat sink 5. Therefore, the heat generated by each of the power modules 51a and 51b can be conducted from the heat sink 5 to the gear portion 8 side, and the heat dissipation is excellent.
- a smoothing capacitor and a choke coil which are relatively large electrical elements, are arranged in the relay member 4 and a space is provided between them, thereby improving heat dissipation and assembling each part sequentially as described above. And the effect of improving the assemblability is achieved.
- control device 6 is mounted on the front side which is the output side of the motor 2.
- control device 6 is mounted on the opposite side of the motor 2, that is, on the rear side of the motor 2.
- electrical elements such as a smoothing capacitor are equally arranged horizontally on the relay member in the same manner as described above.
- a large component such as a smoothing capacitor can be used regardless of whether the control device is disposed on the front side or the rear side of the motor.
- a certain electrical element can be placed horizontally on a relay member away from the power module, thereby shortening the length in the output shaft direction and thus reducing the size of the device.
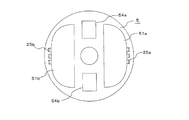
- FIG. 12 is a plan view of a heat sink in the electric power steering apparatus according to Embodiment 5 of the present invention.
- the first and second power modules 51a and 51b are symmetrically and equally arranged from the center of the circular heat sink 5 to the left and right of the drawing.
- first and second relays 54a and 54b are arranged on the heat sink 5 between the first and second power modules 51a and 51b.
- each power module 51a, 51b is shown as two parts, but a large number of, for example, one inverter circuit may be configured as three or more power modules. These power modules are equally spaced apart from each other in the range of positions of the first and second power modules 51a and 51b in FIG. 12 for each system.
- FIG. 13 is a plan view of a relay member in an electric power steering apparatus according to Embodiment 5 of the present invention.
- the arrangement of the first and second power modules 51a and 51b in the heat sink 5 is as described above.
- positioning shown in FIG. 12 is shown.
- the left side and the right side of the solid line Y show different arrangements of the smoothing capacitor and the choke coil as electrical elements.
- the choke coil 13 is disposed at a position far from the first and second screen-shaped guides 44 a and 44 b provided at two locations on the outer edge of the relay member 4.
- the first and second power modules 51a as shown in FIG. 12, facing the opposite surface portion of the relay member 4 corresponding to the position where the first and second screen-shaped guides 44a, 44b are provided. Since 51b is arranged on the plane of the heat sink 5, the smoothing capacitors C1a, C2a, C3a, and C1b, C2b, C3b face the vicinity of the arrangement of the first and second power modules 51a and 51b in FIG. It arrange
- the smoothing capacitors C1a, C2a, C3a, and C1b, C2b, C3b are placed horizontally and arranged radially with respect to the central portion of the relay member 4, respectively. Is done.
- the smoothing capacitors C1a, C2a, C3a, and C1b, C2b, C3b are placed horizontally and parallel to the horizontal direction in FIG.
- the smoothing capacitors C1a, C2a, C3a, and C1b, C2b, C3b are arranged equally for each system corresponding to the arrangement positions of the first and second power modules 51a, 51b. Furthermore, the smoothing capacitors are spaced apart from each other. As shown in FIG. 13, the choke coil 13 which is another electrical element is disposed between the smoothing capacitors C1a, C2a, C3a and the smoothing capacitors C1b, C2b, C3b. The choke coil 13, the smoothing capacitors C1a, C2a, and C3a, and the smoothing capacitors C1b, C2b, and C3b are evenly arranged on the relay member 4 regardless of the arrangement on the left or right of the solid line Y.
- each power module is arranged away from the stator winding, and the electrical element is connected to the relay member correspondingly. Since the smoothing capacitors and the choke coils are equally spaced apart from each other, a narrow space in the control device can be used effectively, and the dimension in the axial direction can be reduced.
- the embodiments can be freely combined, or the embodiments can be appropriately modified or omitted.
- the electric power steering apparatus according to the present invention can be expected to be used in the automobile industry.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Steering Mechanism (AREA)
- Motor Or Generator Frames (AREA)
Abstract
ヒートシンク5と中継部材4との面部をモータを軸心方向に対して垂直方向に配置し、複数個の駆動回路の各パワーモジュール51a、51bを、その最大外形寸法の延びる方向が軸線方向に対して垂直となるようにヒートシンク5の面部に装着し、複数個の駆動回路の各電気的素子C1a~C1bを、その最大外形寸法の延びる方向が軸線方向に対して垂直となるように中継部材4の面部に装着するようにした。
Description
この発明は、電動パワーステアリング装置に関し、更に詳しくは、ドライバの操舵力をアシストするモータとこのモータを制御する制御装置とを一体化した電動パワーステアリング装置に関するものである。
従来の電動パワーステアリング装置は、主にドライバの操舵力をアシストするためのモータと、このモータを制御する制御装置と、モータの出力を減速してステアリングシャフトに伝達する減速機構との連結装置と、ドライバの操舵力等を検出するセンサ類と、により構成されている。尚、ギア部を含めて電動パワーステアリング装置と称することもある。
更に、近年あらゆる車両に電動パワーステアリング装置が搭載されるようになっているが、電動パワーステアリング装置の故障によりアシスト機能が停止すると、ドライバがハンドルを回転させることが不可能に近く、車両走行自体が困難となっている。そこで、故障の内容によっては、できる限りアシストを継続する要求が高まっている。その対策の1つとして、モータ、又はモータの固定子巻線を複数設けると共に、それ等を制御するための駆動回路も複数個備えるようにした電動パワーステアリング装置が提案されている(例えば、特許文献1参照)。
又、電動パワーステアリング装置の小型化の1つの対策として、モータと制御装置とを一体化した制御装置一体型電動パワーステアリング装置が提案されている(例えば、特許文献2参照)。特許文献2に示された従来の装置は、モータの出力側(以下、フロント側と称する)に、モータの軸心の延びる方向(以下、軸線方向と称する)に制御装置を配置するようにしている。
特許文献1に示された従来の電動パワーステアリング装置は、モータ自体は1個であるが、2組の3相固定子巻線と、これ等の固定子巻線の夫々に対応した駆動回路であるインバータを2組有し、且つ、モータの出力軸の軸線の延びる方向にモータと制御装置とを並置して一体化した構成が示されている。この従来の電動パワーステアリング装置に於いて、インバータ回路を構成する主要部品であるパワーモジュールは、その平面の延びる方向がモータの軸方向に対して略平行に配置(以下、この配置を、縦置きと称する)されている。そのために電動パワーステアリング装置の軸長が長くなるばかりでなく、ヒートシンクも縦置きされ、放熱性が悪いという課題があった。更に、コンデンサ他の比較的大型部品がヒートシンクに密集して配置されており、これら大型部品の放熱性にも課題があった。
又、前述の従来の電動パワーステアリング装置は、パワーモジュールが縦置きされ、モータの固定子巻線とパワーモジュールとの接続が、モータより遠い位置に存在するパワーモジュールの上面端で行なわれるように構成されており、組立てが複雑になるという課題があった。
更に、特許文献2に示された従来の電動パワーステアリング装置は、モータ軸方向に配置されたヒートシンクに凹部を設け、その凹部の中にコンデンサ他を配置しているが、ヒートシンクに凹部を設けているためにヒートシンクの容積が低下し、又、その凹部により発熱の大きなパワー素子の配置が制限されるという課題があった。
この発明は、従来の電動パワーステアリング装置に於ける前述のような課題を解決するためになされたもので、軸長がより短く、放熱性のよい電動パワーステアリング装置を提供することを目的とする。
この発明による電動パワーステアリング装置は、
独立した複数個の固定子巻線を備えたモータと、前記複数個の固定子巻線を個別に駆動する複数個の駆動回路を備えた制御装置とを備え、前記制御装置により駆動される前記モータの出力に基づいてドライバの操舵力をアシストするようにした電動パワーステアリング装置であって、
前記制御装置に配置され、前記モータの軸線方向に対して垂直に配置された面部を有する中継部材を備え、
前記複数個の駆動回路は、前記対応する固定子巻線への供給電力を制御するスイッチング素子からなる複数個のパワー素子を収納したパワーモジュールと、前記駆動回路の構成部品としての複数の電気的素子とを有し、
下記(1)と(2)とのうち少なくとも一方を備えていることを特徴とする電動パワーステアリング装置。
(1)前記複数個の駆動回路のパワーモジュールは、その主面が前記モータの軸線方向に対して垂直となるように、前記中継部材の面部から離れた位置に配置されたヒートシンクに夫々装着されている。
(2)前記駆動回路の電気的素子は、その最大外形寸法の延びる方向が前記モータの軸線方向に対して垂直となるように前記中継部材の面部に装着されている。
独立した複数個の固定子巻線を備えたモータと、前記複数個の固定子巻線を個別に駆動する複数個の駆動回路を備えた制御装置とを備え、前記制御装置により駆動される前記モータの出力に基づいてドライバの操舵力をアシストするようにした電動パワーステアリング装置であって、
前記制御装置に配置され、前記モータの軸線方向に対して垂直に配置された面部を有する中継部材を備え、
前記複数個の駆動回路は、前記対応する固定子巻線への供給電力を制御するスイッチング素子からなる複数個のパワー素子を収納したパワーモジュールと、前記駆動回路の構成部品としての複数の電気的素子とを有し、
下記(1)と(2)とのうち少なくとも一方を備えていることを特徴とする電動パワーステアリング装置。
(1)前記複数個の駆動回路のパワーモジュールは、その主面が前記モータの軸線方向に対して垂直となるように、前記中継部材の面部から離れた位置に配置されたヒートシンクに夫々装着されている。
(2)前記駆動回路の電気的素子は、その最大外形寸法の延びる方向が前記モータの軸線方向に対して垂直となるように前記中継部材の面部に装着されている。
この発明に於いてパワーモジュールの主面とは、パワーモジュールの外表面のうち最も大なる表面積を備えて略平面的に広がる表面を意味し、所謂、側面以外の表面若しくは裏面がこれに相当する。
この発明の電動パワーステアリング装置によれば、軸長が短く、又、放熱がヒートシンクから他の部品へ広範囲に伝わり高放熱性を備えることができる。
実施の形態1.
以下、この発明の実施の形態1による電動パワーステアリング装置を、図に基づいて説明する。図1は、この発明の実施の形態1による電動パワーステアリング装置を示す一部断面図である。図1に於いて、電動パワーステアリング装置1は、主にドライバの操舵力をアシストするためのモータ2と、後述するパワーモジュールを冷却するためのヒートシンク5と、モータ2を制御する制御装置6と、モータ2の出力を減速してステアリング軸(図示せず)に伝達するギア部8とから構成されている。モータ2と制御装置6とヒートシンク5とギア部8とは、モータ2の軸心の延びる方向(以下、軸線方向と称する)に順次並置されて一体化されている。
以下、この発明の実施の形態1による電動パワーステアリング装置を、図に基づいて説明する。図1は、この発明の実施の形態1による電動パワーステアリング装置を示す一部断面図である。図1に於いて、電動パワーステアリング装置1は、主にドライバの操舵力をアシストするためのモータ2と、後述するパワーモジュールを冷却するためのヒートシンク5と、モータ2を制御する制御装置6と、モータ2の出力を減速してステアリング軸(図示せず)に伝達するギア部8とから構成されている。モータ2と制御装置6とヒートシンク5とギア部8とは、モータ2の軸心の延びる方向(以下、軸線方向と称する)に順次並置されて一体化されている。
モータ2は、3相デルタ結線された第1の固定子巻線2a及び3相デルタ結線された第2の固定子巻線2bが巻回された積層鉄心からなる固定子21と、固定子21の中央空間内に挿入された回転子22と、回転子22の中心部に配設された出力軸24と、固定子21と回転子22と出力軸24とを内部に収納するヨーク23と、から構成されている。第1の固定子巻線2aと第2の固定子巻線2bは、互いに独立した2個の固定子巻線を形成している。第1の固定子巻線2aと後述する第1のインバータ回路511aは、モータ2の第1の制御系統を構成し、第2の固定子巻線2bと後述する第2のインバータ回路511bは、モータ2の第2の制御系統を構成する。
制御装置6は、マイクロコンピュータ(以下CPUと称する)31を搭載した制御基板3と、ヒートシンク5に当接した独立した2個のパワーモジュールである第1のパワーモジュール51a及び第2のパワーモジュール51bと、ヒートシンク5と制御基板3との間に介在しこれ等を所定の間隔を介して対向させる中継部材4と、制御基板3と第1及び第2のパワーモジュール51a、51bと中継部材4とを内部に収納するハウジング7と、から構成されている。
前述の第1及び第2のパワーモジュール51a、51bは、後述するように略扇形に形成されており、その主面を構成する表面及び裏面は、モータ2の軸線方向に対して垂直に配置されている。第1及び第2のパワーモジュール51a、51bの各主面の面積は、外縁部の側面と、内縁部の側面と、外縁部と内縁部とを結ぶ側縁部の側面との、何れの側面の面積よりも大きく形成されている。
第1及び第2の固定子巻線2a、2bの巻線端25a、25bは、第1及び第2のパワーモジュール51a、51bへ向かってモータ2の軸線方向に延出している。そして、これ等の巻線端25a、25bは、制御基板3を貫通して中継部材4をガイドとして利用しながら、第1及び第2のパワーモジュール51a、51bの巻線接続端子52a、52bに、夫々接続されている。又、中継部材4をガイドとして使用することにより、巻線の振動対策にも寄与する。
尚、第1及び第2の固定子巻線2a、2bの巻線端25a、25bは、制御基板3を貫通せずに制御基板3の周縁部を経由して中継部材4をガイドとして第1及び第2のパワーモジュール51a、51bの各接続端子52a、52bに接続するようにしても良い。又、第1及び第2のパワーモジュール51a、51bの接続端子52a、52bと、第1及び第2の固定子巻線2a、2bの各巻線端25a、25bを接続する位置は、図1に示す中継部材4と第1及び第2のパワーモジュール51a、52bとの間のみならず、制御基板3と中継部材4との間、或いは第1及び第2の固定子巻線2a、2bと制御基板3との間の空間であっても良く、それ等の空間の位置まで各接続端子52a、52bと各巻線端25a、25bを延出することでそれ等の接続を実現することができ、電動パワーステアリング装置の組立て性を考慮してそれ等の接続位置を任意に選択することができる。
制御装置6に於けるCPU31は、モータ2へ供給する電流に見合う制御量を演算し、その演算結果に基づいた制御信号を出力する。CPU31から出力された制御信号は、第1の制御端子53a及び第2の制御端子53bを介して第1及び第2のパワーモジュール51a、51bへ夫々伝達される。又、後述するように、第1及び第2のパワーモジュール51a、51bから各接続端子53a、53bを介してCPU31へモータ2の端子電圧、電流等が伝達され、CPU31に於いてそれ等をモニタするように構成されている。
ヒートシンク5は、モータに対してモータの軸線方向に配置されると共に、モータの軸線方向に対して垂直方向に延びる平面を備えている。ヒートシンク5の軸線方向の一端面(図1の上側の端面)側に、ハンドル又はタイヤにモータ2からのアシストトルクを伝達するギア部8が密着して固定され、軸線方向の他端面(図1の下側の端面)側の平面に、第1及び第2のパワーモジュール51a、51bの主面が密着して固定されている。ここで、パワーモジュール51a、51bの主面とは、パワーモジュールの外表面のうち最も大なる表面積を備えて略平面的に広がる表面を意味し、所謂、側面以外の表面若しくは裏面がこれに相当する。
第1及び第2のパワーモジュール51a、51bの動作により発生する熱は、ヒートシンク5を介して放熱されると共に、ヒートシンク5を介してギア部8へも伝達されて放熱される。そのため、ヒートシンク5は、放熱性のよい材料、例えばアルミニユーム製とするのが望ましい。ヒートシンク5の中央部には、ベアリング81が固定されている。このベアリング81は、モータ2の出力軸24を回動自在に支持すると共に出力軸24の軸心の位置決めの役目を担っている。
中継部材4には、第1及び第2のパワーモジュール51a、51bをヒートシンク5に密着させるための第1の突起41a、及び第2の突起41bが、夫々第1及び第2のパワーモジュール51a、51bに対応して設けられている。これ等の第1及び第2の突起41a、41bは、第1及び第2のパワーモジュール51a、51bをヒートシンク5側に押圧することで、第1及び第2のパワーモジュール51a、51bをヒートシンク5に密着させる。
次に、中継部材4について説明する。図2は、この発明の実施の形態1による電動パワーステアリング装置に於ける、中継部材の平面図、図3は、図2のA-A線に沿って矢印方向から視た断面図である。図1乃至図3に於いて、中継部材4は、図2によく示されているように略円形をなし、全体が絶縁性樹脂により構成されている。
前述の第1及び第2の突起41a、41bは、夫々3個ずつ設けられ、第1の突起41aは、中継部材4の中心に対して図2の左側に相互に間隔を介して縦に配列して設けられ、第2の突起41bは、中継部材4の中心に対して図2の右側に相互に間隔を介して縦に整列して設けられている。中継部材4の軸線方向の両端面には、夫々軸線方向に突出する複数個の脚部42が設けられている。これ等の脚部42のうち、中継部材4に於ける制御基板3側の端面に設けられた4個の脚部42には、更に軸線方向に延びる円筒部421が形成されており、これ等の円筒部421が制御基板3に設けられた穴に挿入され、制御基板3の位置決めと支持を行なう。
中継部材4には、第1のパワーモジュール51aに接続される複数の第1の導電体48aと、第2のパワーモジュール51bに接続される複数の第2の導電体48bとが埋設されている。中継部材4に埋設された複数の第1の導電体48aの一部分は、中継部材4の切欠部から露出して第1のパワーモジュール51aに接続される複数の第1の導体端子46aとなる。同様に、中継部材4に埋設された複数の第2の導電体48bの一部分は、中継部材4の切欠部から一部分が露出して第2のパワーモジュール51bに接続される複数の第2の導体端子46bとなる。中継部材4に埋設された複数の第1の導体48aと複数の第2の導電体48bは、夫々、バッテリ等の電源に接続される電源ラインと車両のグランドレベルに接続されるグランドラインとなる。
中継部材4の中央部に設けられた中心穴401は、モータ2の出力軸24により貫通され、その中心穴401の周囲にはガイド部43が形成されている。このガイド部43には軸心方向に貫通する第1及び第2の小穴49a、49bが複数個ずつ設けられている。これ等の小穴49a、49bには、第1及び第2のパワーモジュール51a、51bからの導体ピンが挿入される。又、巻線端25a、25bが貫通する複数の矩形穴45a、45bを夫々備えたガイド部としての第1及び第2の衝立状ガイド44a、44bが中継部材4の両端縁部に夫々配置されている。前述の矩形状の穴45a、45bは、3個ずつ設けられており、これ等の矩形穴45a、45bに巻線端25a、25bを夫々貫通させることにより、巻線端25a、25bに対するガイドと位置決めが行なわれるように構成されている。
更に、中継部材4の一部には、車両からの電気配線、例えばセンサ信号、電源、グランドラインを導く複数個の導体ピン47が軸線方向に突出するように設けられている。
図1に示すように、制御装置6は、モータ2の軸線方向に、モータ2とギア部8との間に配置され、制御装置6の中央にはモータ2の出力軸24が貫通している。このように構成された電動パワーステアリング装置1の組立て順は、先ず、中継部材4と第1及び第2のパワーモジュール51a、51bを重ね、更にその上に制御基板3を積み重ねて制御装置6を組付け、この制御装置6をモータ2の軸心方向に組合せて後、ハウジング7、及びヒートシンク5を組付け、最後にギア部8を一体化する順序となる。
或いは、別の組立て順序として、先ず、モータ2の上に制御基板3と、中継部材4と、第1及び第2のパワーモジュール51a、51bを順次積み重ね、次に、ハウジング7と、ヒートシンク5とを装着し、最後に、ギア部8を組付けるようにすることも可能である。更には、ハウジング7が複数に分割されている場合、ヒートシンク5の上部に(図1ではヒートシンクの下部)第1及び第2のパワーモジュール51a、51bを搭載し、次に、中継部材4と、制御基板3とを組み上げてモータ2と接続した後、ハウジング7と、ギア部8とを組付けるようにしてもよい。
次に、この発明の実施の形態1による電動パワーステアリング装置を、電気回路的な視野で説明する。図4は、この発明の実施の形態1による電動パワーステアリング装置の回路構成図である。図4に於いて、この発明の実施の形態1による電動パワーステアリング装置1は、ドライバの操舵力をアシストする駆動力を発生するモータ2と、第1の駆動回路としての第1のインバータ回路511aと、第2の駆動回路としての第2のインバータ回路511bと、制御基板3に搭載されたCPU31と、車両に搭載されたバッテリ12と、バッテリ12から第1のインバータ回路511aへの電源供給を制御する電界効果型トランジスタ(以下、FETと称する)により構成された第1のリレー54aと、バッテリ12から第2のインバータ回路511bへの電源供給を制御するFETにより構成された第2のリレー54bと、ドライバの操舵トルクや車速等を検出するセンサ類11とを備えている。25a、25bは、図1に於いて述べた第1及び第2の固定子巻線2a、2bの巻線端である。
第1のインバータ回路511aは、第1のパワーモジュール51aに内蔵されており、FETからなる6個のパワー素子としてのスイッチング素子T1a、T2a、T3a、T4a、T5a、T6aと、3個のシャント抵抗Rua、Rva、Rwaと、1個の平滑コンデンサC1aとにより構成されている。6個のスイッチング素子のうち、スイッチング素子T1a、T3a、T5aは、三相ブリッジ回路のU相上アーム、V相上アーム、W相上アームに夫々挿入され、スイッチング素子T2a、T4a、T6aは、三相ブリッジ回路のU相下アーム、V相下アーム、W相下アームに夫々挿入されている。
後述のモータ電流検出のために設けられたシャント抵抗Rua、Rva、Rwaは、スイッチング素子T2a、T4a、T6aと車両のグランドレベルとの間に夫々接続されている。スイッチング素子T1a、T3a、T5aの共通接続部と車両のグランドレベルとの間に接続された平滑コンデンサC1aは、第1のインバータ回路511aに供給される電源電圧を平滑化するために設けられている。
スイッチング素子T1aとスイッチング素子T2aとの直列接続部であるU相交流端子は、モータ2の第1の固定子巻線2aのU相端子に接続され、スイッチング素子T3aとスイッチング素子T4aとの直列接続部であるV相交流端子は、第1の固定子巻線2aのV相端子に接続され、スイッチング素子T5aとスイッチング素子T6aとの直列接続部であるW相交流端子は、第1の固定子巻線2aのW相端子に接続されている。
スイッチング素子T1a、T3a、T5aにより夫々構成された三相ブリッジ回路の各相の上アームの一端は、相互に共通接続されて第1のインバータ回路511aの正極側直流端子を構成し、第1のリレー54aを介してバッテリ12の正極側端子に接続される。一方、スイッチング素子T2a、T4a、T6aにより夫々構成された三相ブリッジ回路の各相の下アームの一端は、第1のインバータ回路511aの負極側直流端子を構成し、夫々シャント抵抗Rua、Rva、Rwaを介して車両のグランドレベルに接続されている。
第2のインバータ回路511bは、第2のパワーモジュール51bに内蔵されており、FETから成る6個のパワー素子としてのスイッチング素子T1b、T2b、T3b、T4b、T5b、T6bと、3個のシャント抵抗Rub、Rvb、Rwbと、1個の平滑コンデンサC1bとにより構成されている。6個のスイッチング素子のうち、スイッチング素子T1b、T3b、T5bは、三相ブリッジ回路のU相上アーム、V相上アーム、W相上アームに夫々挿入され、スイッチング素子T2b、T4b、T6bは、三相ブリッジ回路のU相下アーム、V相下アーム、W相下アームに夫々挿入されている。
モータ電流検出のために設けられたシャント抵抗Rub、Rvb、Rwbは、スイッチング素子T2b、T4b、T6bと車両のグランドレベルとの間に夫々接続されている。スイッチング素子T1b、T3b、T5bの共通接続部と車両のグランドレベルとの間に接続された平滑コンデンサC1bは、第2のインバータ回路511bに供給される電源電圧を平滑化するために設けられている。
スイッチング素子T1bとスイッチング素子T2bとの直列接続部であるU相交流端子は、モータ2の第2の固定子巻線2bのU相端子に接続され、スイッチング素子T3bとスイッチング素子T4bとの直列接続部であるV相交流端子は、第2の固定子巻線2bのV相端子に接続され、スイッチング素子T5bとスイッチング素子T6bとの直列接続部であるW相交流端子は、第2の固定子巻線2bのW相端子に接続されている。
スイッチング素子T1b、T3b、T5bにより夫々構成された三相ブリッジ回路の各相の上アームの一端は、相互に共通接続されて第2のインバータ回路511bの正極側直流端子を構成し、第2のリレー54bを介してバッテリ12の正極側端子に接続される。一方、スイッチング素子T2b、T4b、T6bにより夫々構成された三相ブリッジ回路の各相の下アームの一端は、第2のインバータ回路511bの負極側直流端子を構成し、夫々シャント抵抗Rub、Rvb、Rwbを介して車両のグランドレベルに接続されている。
制御基板3に搭載されたCPU31は、車両に搭載されたセンサ類11からの情報によりモータ2を駆動する目標電流値に相当する制御量を演算し、その演算した制御量を、ライン32を介して第1及び第2のインバータ回路511a、511bの各スイッチング素子のゲートに与え、これ等のスイッチング素子をPWM制御する。
モータ2は、第1のインバータ回路511a、及び第2のインバータ回路511bによりPWM制御された三相交流電力により駆動され、所望のアシストトルクを発生して前述のギア部8を介してステアリング軸(図示せず)に加える。CPU31により演算された目標電流制御量は、第1のインバータ回路511aと第2のインバータ回路511bに振り分けられ、第1の固定子巻線2aと第2の固定子巻線2bとで電流量を分担する。この分担割合は任意に設定可能である。
第1のインバータ回路511aのU相交流端子、V相交流端子、及びW相交流端子から取り出された第1の固定子巻線2aのU相端子電圧Mua、V相端子電圧Mva、W相端子電圧Mwaは、夫々、信号ライン33を介してCPU31へ入力される。又、第1のインバータ回路511aの各シャント抵抗Rua、Rva、Rwaと各スイッチング素子T2a、T4a、T6aとの接続部から取り出された、第1の固定子巻線2aに流れるU相モータ電流Iua、V相モータ電流Iva、W相モータ電流Iwaは、信号ライン33を介してCPU31へ入力される。
同様に、第2のインバータ回路511bのU相交流端子、V相交流端子、及びW相交流端子から取り出された第2の固定子巻線2bのU相端子電圧Mub、V相端子電圧Mvb、W相端子電圧Mwbは、夫々、信号ライン33を介してCPU31へ入力される。又、第2のインバータ回路511bの各シャント抵抗Rub、Rvb、Rwbと各スイッチング素子T2b、T4b、T6bとの接続部から取り出された、第2の固定子巻線2bに流れるU相モータ電流Iub、V相モータ電流Ivb、W相モータ電流Iwbは、信号ライン33を介してCPU31へ入力される。
以上のように構成されたこの発明の実施の形態1による電動パワーステアリング装置に於いて、CPU31からの出力に基づいて、例えば所定の分担量に基づいて、第1の固定子巻線2aと第2の固定子巻線2bの電流量を制御し、所望のアシストトルクをモータ2に発生させる。即ち、CPU31は、前述したようにセンサ類11から入力されるドライバによる操舵トルクと車速等の情報に基づいて、モータ2の目標電流制御量を算出し、その算出した目標電流制御量に対する前述の分担量に対応したゲート信号を、信号ライン32を介して第1のインバータ回路511aの各スイッチング素子のゲートに与え、これ等のスイッチング素子をPWM制御する。同様に、前述の算出した目標電流制御量に対する前述の分担量に対応したゲート信号を、信号ライン32を介して第2のインバータ回路511bの各スイッチング素子のゲートに与え、これ等のスイッチング素子をPWM制御する。
モータ2は、第1のインバータ回路511aによりPWM制御された三相交流電力により付勢される第1の固定子巻線2aと、第2のインバータ回路511bによりPWM制御された三相交流電力により付勢される第2の固定子巻線2bとにより駆動され、運転者の操舵トルクと車速に対応したアシストトルクを発生してステアリング軸(図示せず)に加える。
尚、CPU31からの指令により第1及び第2のリレー54a、54bの開閉を制御し、第1のインバータ回路511a、又は第2のインバータ回路511bのうちの何れか一方のみを選択してモータ2を駆動するようにし、他方の系統を休止状態とすることも可能である。
次に、発熱の大きなパワー素子である前述のスイッチング素子を内蔵した第1及び第2のパワーモシュール51a、51b等の配置について説明する。図5は、この発明の実施の形態1による電動パワーステアリング装置に於ける、パワーモジュールの配置を示す制御装置内部の平面図であって、ヒートシンク5の前述の他端面(図1の下側の端面)側の平面に、第1及び第2のパワーモジュール51a、51bが密着して固定されている状態を示している。
図5に於いて、ヒートシンク5には、第1及び第2のパワーモジュール51a、51bの他に、前述の第1及び第2のリレー54a、54bが搭載されている。第1及び第2のパワーモジュール51a、51bと、第1及び第2のリレー54a、54bは、大電流を流すことにより発熱量が大きく、放熱効果を大きくしないと大電流を流すことはできない。制御装置6全体は、モータ2の図1に於ける上部に配置され、制御装置6を構成する各部品がモータ2に一体に固定されており、更に、略円形をなしたヒートシンク5は、制御装置6のハウジング7に固定されている。
第1のパワーモジュール51aと第2のパワーモジュール51bは、ヒートシンク5の表面のほぼ全面に、中心を挟んで両側に均等に配置されている。そして、第1及び第2のパワーモジュール51a、51bは、ヒートシンク5との接触面積を大きくするためにヒートシンク5の外形形状に沿うように略扇形をなしている。
第1及び第2のパワーモジュール51a、51bの外縁部512a、512bは、前述の巻線接続端子52a、52bを引き出すために円弧が一部分切り欠かれた直線状に形成されているが、この直線部から両側に延びる外縁部は円弧状に形成され、又、第1及び第2のパワーモジュール51a、51bの内縁部513a、513bは、出力軸24を貫通させるヒートシンク5の中心穴501に沿った円弧状をなし、12個ずつの制御端子57a、57bが引き出されている。
又、第1及び第2のパワーモジュール51a、51bの外縁部512a、512bと内縁部513a、513bとを夫々結ぶ側面部514a、514bは、ヒートシンク5の中心部から放射状に延びる直線に沿って直線状に形成されている。第1のパワーモジュール51aの2個の電源ライン接続端子56aと、前述のシャント抵抗Rua、Rva、Rwaに夫々接続される3個の抵抗接続端子55ua、55va、55waは、パワーモジュール51aの側面部514aから引き出されている。第2のパワーモジュール51bの2個の電源ライン接続端子56bと、前述のシャント抵抗Rub、Rvb、Rwbに夫々接続される3個の抵抗接続端子55ub、55vb、55wbは、パワーモジュール51bの側面部514bから引き出されている。
第1及び第2のパワーモジュール51a、51bの各2個の電源ライン接続端子56a、56bのうちの一方は、中継部材4に埋設された電源ラインとなる一部の導電体46a、46bに夫々接続され、他方は、平滑コンデンサC1a、C1bを介して中継部材4に埋設されたグランドラインとなる一部の導電体46a、46bに夫々接続される。
電子リレーとしての第1及び第2のリレー54a、54bは、樹脂モールド部材により略扇形にモールドされ、夫々略扇形に形成された第1及び第2のパワーモジュール51a、51bの間に配置され、ヒートシンク5の他端面(図1の下側の端面)側の平面に密着して固定されている。第1のリレー54aの直線状に形成された両側の側面部541aには、中継部材4に埋設された電源ラインとなる導電体46aの一つに接続される入力側端子61aと、第1のパワーモジュール51aの電源ライン接続端子56aの一つに接続される出力側端子62aとが夫々引き出され、内縁部には制御端子63aが引き出されている。第2のリレー54bの直線状に形成された両側の側面部541bには、中継部材4に埋設された電源ラインとなる導電体46bの一つに接続される入力側端子61bと、第2のパワーモジュール51bの電源ライン接続端子56bの一つに接続される出力側端子62bとが夫々引き出され、内縁部には制御端子63bが引き出されている。
ヒートシンク5の周縁部には、ネジ穴を備えた鍔部58が複数個分散して配置されている。これ等の鍔部58の一部は、ヒートシンク5をギア部8へ固定するための鍔部であり、その他は、モータ2と制御装置6とを固定するための鍔部である。
以上述べたように、第1及び第2のパワーモジュール51a、51bの外形は、冷却面積を有効にとるために、略扇形に形成され、更に接続端子等も1箇所にまとめて配置するのではなく、分散配置されている。特に電流容量の大きさで分離し、小電流が流れる制御端子57a、57bは、まとめて内縁部513a、513bに配置されている。
次に、第1及び第2のパワーモジュール51a、51b内のパワー素子としてのスイッチング素子について説明する。図2乃至図4では、第1及び第2の固定子巻線2a、2bの巻線端25a、25bに夫々接続される各相の上アーム及び下アームに夫々接続されたFETからなる6個ずつのスイッチング素子T1a~T6a、T1b~T6bを、夫々1つのパッケージに内蔵して第1及び第2のパワーモジュール51a、51bを形成した場合について説明したが、パワーモジュールに内蔵する回路は、以下述べるように種々の形態が考えられる。
図6は、この発明の実施の形態1による電動パワーステアリング装置に於ける、パワーモジュールの回路図である。図6に於いて、(a)は、各相毎の上下1対のアームのFETからなる2個のスイッチング素子T1、T2のみを1個のパワーモジュールに内蔵させた場合を示している。(b)は、FETから成る3個のスイッチング素子T1、T2、及びT3を内蔵して1個のパワーモジュールとしたものであり、1個のスイッチング素子T3は、モータ2の巻線端25a、25bと、上下一対のアームのスイッチング素子T1、T2の接続点との間に挿入されている。このスイッチング素子T3は、モータ2の巻線端25a、25bと上下アームの各スイッチング素子T1、T2との接続をオン、オフ制御できるものであり、いわばモータリレーの役目を担っている。
(c)は、上下1対のFETからなるスイッチング素子T1、T2と電流検出用のシャント抵抗Rを内蔵して1個のパワーモジュールに形成したものある。(d)は、上下2対のFETからなるスイッチング素子T1~T4を内蔵して1個のパワーモジュールとしたものである。この(d)に示すタイプのパワーモジュールは、特にHブリッジを構成することが可能で、ブラシ付きモータの制御に適している。
このように、複数のパワー素子であるスイッチング素子を、モータのタイプ、機能等を考慮して内蔵することにより、種々のパワーモジュールの形態を取ることが可能である。尚、図6の(a)~(d)に於ける〇印は、パワーモジュールから導出される端子を示している。
又、前述したように、電子リレーとしての第1及び第2のリレー54a、54bについてもパワーモジュ-ル化は可能であり、モータ用と同等のFETを複数個並列接続したり、2個のチップを同一基板上に搭載し、外見上は1個の部品とすることもできる。このように複数のパワー素子を搭載したものがパワーモジュールである。
実施の形態2.
前述の実施の形態1は、モータの出力方向即ちモータのフロント側に制御装置を搭載した場合を示し、更に詳しく述べれば、モータのフロント側に、制御装置とヒートシンクとギア部とを、その順番にて順次モータの軸線方向に並置してこれ等を一体化した電動パワーステアリング装置を示したが、以下述べるこの発明の実施の形態2による電動パワーステアリング装置は、モータの反出力方向、即ちモータのリア側に制御装置を搭載したものであり、更に詳しく述べれば、モータのリア側にヒートシンクと制御装置とをその順番にて順次モータの軸線方向に並置してこれ等を一体に固定すると共に、モータのフロント側にモータの軸線方向にギア部を並置してこれ等を一体に固定するようにしたものである。
前述の実施の形態1は、モータの出力方向即ちモータのフロント側に制御装置を搭載した場合を示し、更に詳しく述べれば、モータのフロント側に、制御装置とヒートシンクとギア部とを、その順番にて順次モータの軸線方向に並置してこれ等を一体化した電動パワーステアリング装置を示したが、以下述べるこの発明の実施の形態2による電動パワーステアリング装置は、モータの反出力方向、即ちモータのリア側に制御装置を搭載したものであり、更に詳しく述べれば、モータのリア側にヒートシンクと制御装置とをその順番にて順次モータの軸線方向に並置してこれ等を一体に固定すると共に、モータのフロント側にモータの軸線方向にギア部を並置してこれ等を一体に固定するようにしたものである。
図7は、この発明の実施の形態2よる電動パワーステアリング装置の断面図である。図7に於いて、制御装置6は、モータ2の反出力方向、即ちモータ2の反フロント側であるリア側に、モータ2の軸線方向に配置されて搭載されている。より具体的に述べれば、電動パワーステアリング装置1は、モータ2と、ヒートシンク5と、制御装置6と、ギア部8とから構成されており、モータ2の軸線方向に、制御装置6、ヒートシンク5、モータ2、及びギア部8が、その順序に並置されて一体化されている。
制御装置6は、モータ2のリア側に固定されたヒートシンク5の反モータ側端面に密着して固定された第1及び第2のパワーモジュール51a、51bと、中継部材4と、制御基板3の順に積み重ねて組付けられている。中継部材4には実施の形態1と同様に第1及び第2の突起41a、41bが形成されている。第1及び第2のパワーモジュール51a、51bは、これ等の第1及び第2の突起41a、41bによりヒートシンク5に押圧されている。第1及び第2のパワーモジュール51a、51bの各巻線接続端子52a、52bは、夫々ヒートシンク5を貫通したモータ2の第1及び第2の固定子巻線2a、2bの巻線端25a、25bに接続される。
モータ2のフロントブラケット9は、出力軸24を回転自在に支持するベアリング82を固定するのみならず、ギア部8とモータ2のヨーク23とを組付け可能な構造を備えている。
実施の形態1との大きな相違点は、モータ2の第1及び第2の固定子巻線2a、2bの巻線端25a、25bの導出方向が実施の形態1の場合と異なるので、第1及び第2のパワーモジュール51a、51b、及び中継部材4と、巻線端25a、25bとの接続方法が異なる点である。
即ち、実施の形態1では、モータ2の巻線端25a、25bは、制御基板3と中継部材4の衝立状ガイド44a、44bを経由して、第1及び第2のパワーモジュール51a、51bの各巻線接続端子52a、52bに接続され、又は、中継部材4内の導体を介して第1及び第2のパワーモジュール51a、51bの各巻線接続端子52a、52bに接続されていた。しかし、実施の形態2の構成では、モータ2の巻線端25a、25bは、直接、第1及び第2のパワーモジュール51a、51bの各巻線接続端子52a、52bに接続することができる。尚、実施の形態2では、ヒートシンク5に貫通穴を設け、この貫通穴に各巻線端25a、25bを通すことが必要である。ヒートシンク5の貫通穴が各巻線端25a、25bのガイドの役目をなし、貫通穴と巻線間の非導電性ブッシュを介入させヒートシンク5との絶縁性を確保すると共に、巻線の振動対策とすることもできる。
ヒートシンク5は、モータ2のヨーク23と当接しており、ヒートシンク5の熱はヨーク23へも伝熱される。逆にモータ2の発熱の方が大きい場合は、モータ2側の熱をヒートシンク5へ伝達することも可能である。
尚、実施の形態1と同様に、第1及び第2の固定子巻線2a、2bの巻線端25a、25bは、ヒートシンク5を貫通して第1及び第2のパワーモジュール51a、51bの近傍を通り、中継部材4を利用して第1及び第2のパワーモジュール51a、51bの各巻線接続端子52a、52bに接続するようにしてもよい。
以上説明したように、この発明の実施の形態2による電動パワーステアリング装置によれば、モータのフロント側に制御装置を配置した実施の形態1の場合と同様な部品構成を用いて制御装置をモータのリア側に配置することにより、実施の形態1の場合と同一基本構造の基で設計でき、また、一部の部品は共用できるという効果を奏する。更に、ヒートシンクと、中継部材と、制御基板とにモータの出力軸を貫通させるための穴を設ける必要がなく、各部品の面積を有効に利用できる効果がある。
実施の形態3.
前述の実施の形態1及び実施の形態2では、第1及び第2の固定子巻線を夫々含む独立した2系統について、夫々、FETからなる大電流が流れるパワー素子としてのスイッチング素子を第1及び第2のパワーモジュールに内蔵し、これ等の第1及び第2のパワーモジュールを系統別にヒートシンクに均等に分割して対応する固定子巻線の巻線端の近傍に配置すると共に、それ等の近傍に各パワーモジュールに対応するシャント抵抗を配置するようにしていた。これ等の実施の形態の場合、電気的接続の観点からは、電気的接続自体を短くすることができるという長所がある。
前述の実施の形態1及び実施の形態2では、第1及び第2の固定子巻線を夫々含む独立した2系統について、夫々、FETからなる大電流が流れるパワー素子としてのスイッチング素子を第1及び第2のパワーモジュールに内蔵し、これ等の第1及び第2のパワーモジュールを系統別にヒートシンクに均等に分割して対応する固定子巻線の巻線端の近傍に配置すると共に、それ等の近傍に各パワーモジュールに対応するシャント抵抗を配置するようにしていた。これ等の実施の形態の場合、電気的接続の観点からは、電気的接続自体を短くすることができるという長所がある。
しかしながら、2つの制御系統のうちの1つの制御系統が故障、又は、各制御系統の使用頻度、使用電流が均等ではない場合については、パワー素子を夫々制御系統別に分割するのではなく、夫々の制御系統の巻線端に、他の制御系統のパワー素子を混在させて配置させる方が、熱放散の観点からは有利な場合がある。
この発明の実施の形態3による電動パワーステアリング装置は、パワー素子を夫々の制御系統別ではなく、夫々の制御系統の巻線端に、他の制御系統のパワー素子を混在させて分割して配置する、所謂、混在配置させるようにしたものである。
ここで、前述の混在配置の例について、図4を用いて具体的に説明する。先ず、第1のインバータ回路511aの上下アームのスイッチング素子T1aとT2a、T3aとT4a、T5aとT6aは、夫々1対として構成し、又、第2のインバータ回路511bの上下アームのスイッチング素子T1bとT2b、T3bとT4b、T5bとT6bは、夫々1対として構成し、これ等の対毎にパワーモジュールを構成する。
そして、第1のインバータ回路511aのスイッチング素子T1aとT2a、及びT3aとT4aの各対と、第2のインバータ回路511bのスイッチング素子T1bとT2bの対と、から成る6個のスイッチング素子を近隣に配置し、これ等のスイッチング素子が配置されている近傍に、モータ2の第1の固定子巻線2aのU相とV相の巻線端25aと、第2の固定子巻線2bのU相の巻線点25bとを混在させて延出して配置する。
更に、第2のインバータ回路511bのスイッチング素子T3bとT4b、及びT5bとT6bの各対と、第1のインバータ回路511aのスイッチング素子T5aとT6aの対と、から成る6個のスイッチング素子を近隣に配置し、これ等のスイッチング素子が配置されている近傍に、モータ2の第2の固定子巻線2bのV相とW相の巻線端25bと、第1の固定子巻線2aのW相の巻線点25aとを混在させて延出して配置する。
尚、混在配置は、この具体例に限られるものではない。その他の構成は、実施の形態1又は実施の形態2と同様である。
前述した混在配置の場合には、パワーモジュールの数は、制御系統毎の2個ではなく、前述の混在配置毎の2個のパワーモジュールとすることは可能であるが、3個以上に分割した方が実装上自由度が高くなる。例えば、前述したように2個のスイッチング素子の対毎にパワーモジュール化してもよく、或いは、第1のインバータ回路511aのスイッチング素子T1aとT2aの対とT3aとT4aの対とで1個のパワーモジュールとし、第2のインバータ回路511bのスイッチング素子T1bとT2bの対で1個のパワーモジュールとし、第2のインバータ回路511bのスイッチング素子T3bとT4bの対とT5bとT6bの対とで1個のパワーモジュールとし、更に、第1のインバータ回路511aのスイッチング素子T5aとT6aの対で1個のパワーモジュールとしてもよい。後者の場合、4個のパワーモジュールとなるが、前述の混在配置を容易に行うことができる。
このように、この発明の実施の形態3による電動パワーステアリング装置によれば、別の制御系統のスイッチング素子等のパワー素子を混在させて配置することにより、両制御系統の制御量に差異がある場合、発熱の分散をよりよく、均等化することができる。
実施の形態4.
以下、この発明の実施の形態4による電動パワーステアリング装置を、図に基づいて説明する。図8は、この発明の実施の形態1による電動パワーステアリング装置を示す一部断面図である。図8に於いて、電動パワーステアリング装置1は、主にドライバの操舵力をアシストするためのモータ2と、後述する第1及び第2のパワーモジュール51a、51bを冷却するためのヒートシンク5と、モータ2を制御する制御装置6と、モータ2の出力を減速してステアリング軸(図示せず)に伝達するギア部8とから構成されている。モータ2と制御装置6とヒートシンク5とギア部8とは、モータ2の軸心の延びる方向(以下、軸線方向と称する)に順次並置されて一体化されている。
以下、この発明の実施の形態4による電動パワーステアリング装置を、図に基づいて説明する。図8は、この発明の実施の形態1による電動パワーステアリング装置を示す一部断面図である。図8に於いて、電動パワーステアリング装置1は、主にドライバの操舵力をアシストするためのモータ2と、後述する第1及び第2のパワーモジュール51a、51bを冷却するためのヒートシンク5と、モータ2を制御する制御装置6と、モータ2の出力を減速してステアリング軸(図示せず)に伝達するギア部8とから構成されている。モータ2と制御装置6とヒートシンク5とギア部8とは、モータ2の軸心の延びる方向(以下、軸線方向と称する)に順次並置されて一体化されている。
モータ2は、3相デルタ結線された第1の固定子巻線2a及び3相デルタ結線された第2の固定子巻線2bが巻回された積層鉄心を有するからなる固定子21と、固定子21の中央空間内に挿入された回転子22と、回転子22の中心部に配設された出力軸24と、固定子21と回転子22と出力軸24とを内部に収納するヨーク23と、から構成されている。第1及び第2の固定子巻線2a、2bは、互いに独立した2個の固定子巻線を形成している。第1の固定子巻線2aと後述する第1の駆動回路としての第1のインバータ回路511aは、モータ2の第1の制御系統を構成し、第2の固定子巻線2bと後述する第2の駆動回路としての第2のインバータ回路511bは、モータ2の第2の制御系統を構成する。
制御装置6は、マイクロコンピュータ(以下CPUと称する)31を搭載した制御基板3と、ヒートシンク5に当接した独立した2個のパワーモジュールである第1のパワーモジュール51a及び第2のパワーモジュール51bと、ヒートシンク5と制御基板3との間に介在しこれ等を所定の間隔を介して対向させる中継部材4と、制御基板3と第1及び第2のパワーモジュール51a、51bと中継部材4とを内部に収納するハウジング7と、から構成されている。
前述の第1及び第2のパワーモジュール51a、51bは、例えば略扇形に形成されており、その最大外形寸法の延びる方向、つまり主面を構成する表面及び裏面の延びる方向は、モータ2の軸線方向に対して垂直に配置されている。第1及び第2のパワーモジュール51a、51bの各主面の面積は、外縁部の側面と、内縁部の側面と、外縁部と内縁部とを結ぶ側縁部の側面との、何れの側面の面積よりも大きく形成されている。
第1及び第2の固定子巻線2a、2bの巻線端25a、25bは、第1及び第2のパワーモジュール51a、51bへ向かってモータ2の軸線方向に延出している。そして、これ等の巻線端25a、25bは、制御基板3を貫通して中継部材4をガイドとして利用しながら、第1及び第2のパワーモジュール51a、51bの巻線接続端子52a、52bに、夫々接続されている。
尚、第1及び第2の巻線端25a、25bは、制御基板3を貫通せずに制御基板3の周縁部を経由して中継部材4をガイドとして第1及び第2のパワーモジュール51a、51bの各接続端子52a、52bに接続するようにしても良い。又、第1及び第2のパワーモジュール51a、51bの接続端子52a、52bと、第1及び第2の固定子巻線2a、2bの各巻線端25a、25bを接続する位置は、図8に示す中継部材4と第1及び第2のパワーモジュール51a、52bとの間のみならず、制御基板3と中継部材4との間、或いは第1及び第2の固定子巻線2a、2bと制御基板3との間の空間であっても良く、それ等の空間の位置まで各接続端子52a、52bと各巻線端25a、25bを延出することでそれ等の接続を実現することができ、電動パワーステアリング装置1の組立性を考慮してそれ等の接続位置を任意に選択することができる。
制御装置6に於けるCPU31は、モータ2へ供給する電流に見合う制御量を演算し、その演算結果に基づいた制御信号を出力する。CPU31から出力された制御信号は、第1の制御端子53a及び第2の制御端子53bを介して第1及び第2のパワーモジュール51a、51bへ夫々伝達される。又、後述するように、第1及び第2のパワーモジュール51a、51bから各接続端子53a、53bを介してCPU31へモータ2の端子電圧、電流等が伝達され、CPU31に於いてそれ等をモニタするように構成されている。
ヒートシンク5は、モータに対してその軸線方向に配置されると共に、モータの軸線方向に対して垂直方向に延びる平面を備えている。ヒートシンク5の軸線方向の一端面(図1の上側の端面)側に、ハンドル又はタイヤにモータ2からのアシストトルクを伝達するギア部8が密着して固定され、軸線方向の他端面(図1の下側の端面)側の平面に、第1及び第2のパワーモジュール51a、51bの主面が密着して固定されている。
第1及び第2のパワーモジュール51a、51bの動作により発生する熱は、ヒートシンク5を介して放熱されると共に、ヒートシンク5を介してギア部8へも伝達されて放熱される。そのため、ヒートシンク5は、放熱性のよい材料、例えばアルミニユーム製とするのが望ましい。ヒートシンク5の中央部には、ベアリング81が固定されている。このベアリング81は、モータ2の出力軸24を回動自在に支持すると共に出力軸24の軸心の位置決めの役目を担っている。
中継部材4には、第1及び第2のパワーモジュール51a、51bをヒートシンク5に密着させるための第1の突起41a、及び第2の突起41bが、夫々第1及び第2のパワーモジュール51a、51bに対応して設けられている。これ等の第1及び第2の突起41a、41bは、第1及び第2のパワーモジュール51a、51bをヒートシンク5側に押圧することで、第1及び第2のパワーモジュール51a、51bをヒートシンク5に密着させる。
次に、この発明の実施の形態4による電動パワーステアリング装置を、電気回路的な視野で説明する。図9は、この発明の実施の形態1による電動パワーステアリング装置の回路構成図である。図9に於いて、この発明の実施の形態1による電動パワーステアリング装置1は、ドライバの操舵力をアシストする駆動力を発生するモータ2と、第1の駆動回路としての第1のインバータ回路511aと、第2の駆動回路としての第2のインバータ回路511bと、制御基板3に搭載されたCPU31と、車両に搭載された電源としてのバッテリ12と、バッテリ12から第1のインバータ回路511aへの電力の供給を制御する電界効果型トランジスタ(以下、FETと称する)により構成された第1のリレー54aと、バッテリ12から第2のインバータ回路511bへの電力の供給を制御するFETにより構成された第2のリレー54bと、ドライバの操舵トルクや車速等を検出するセンサ類11とを備えている。25a、25bは、図1に於いて述べた第1及び第2の固定子巻線2a、2bの巻線端である。
第1のインバータ回路511aは、第1のパワーモジュール51aに内蔵されており、FETからなる6個のパワー素子としてのスイッチング素子T1a、T2a、T3a、T4a、T5a、T6aと、3個のシャント抵抗Rua、Rva、Rwaと、3個の平滑コンデンサC1a、C2a、C3aとにより構成されている。6個のスイッチング素子のうち、スイッチング素子T1a、T3a、T5aは、三相ブリッジ回路のU相上アーム、V相上アーム、W相上アームに夫々挿入され、スイッチング素子T2a、T4a、T6aは、三相ブリッジ回路のU相下アーム、V相下アーム、W相下アームに夫々挿入されている。
後述のモータ電流検出のために設けられたシャント抵抗Rua、Rva、Rwaは、スイッチング素子T2a、T4a、T6aと車両のグランドレベルとの間に夫々接続されている。スイッチング素子T1a、T3a、T5aの共通接続部と車両のグランドレベルとの間に接続された平滑コンデンサC1a、C2a、C3aは、第1のインバータ回路511aに供給される電源電圧を平滑化するために設けられている。
スイッチング素子T1aとスイッチング素子T2aとの直列接続部であるU相交流端子は、モータ2の第1の固定子巻線2aのU相端子に接続され、スイッチング素子T3aとスイッチング素子T4aとの直列接続部であるV相交流端子は、第1の固定子巻線2aのV相端子に接続され、スイッチング素子T5aとスイッチング素子T6aとの直列接続部であるW相交流端子は、第1の固定子巻線2aのW相端子に接続されている。
スイッチング素子T1a、T3a、T5aにより夫々構成された三相ブリッジ回路の各相の上アームの一端は、相互に共通接続されて第1のインバータ回路511aの正極側直流端子を構成し、第1のリレー54a、及び他の装置へのノイズ流出防止のためのチョークコイル13を介して、バッテリ12の正極側端子に接続される。一方、スイッチング素子T2a、T4a、T6aにより夫々構成された三相ブリッジ回路の各相の下アームの一端は、第1のインバータ回路511aの負極側直流端子を構成し、夫々シャント抵抗Rua、Rva、Rwaを介して車両のグランドレベルに接続されている。
第2のインバータ回路511bは、第2のパワーモジュール51bに内蔵されており、FETから成る6個のパワー素子としてのスイッチング素子T1b、T2b、T3b、T4b、T5b、T6bと、3個のシャント抵抗Rub、Rvb、Rwbと、3個の平滑コンデンサC1b、C2b、C3bとにより構成されている。6個のスイッチング素子のうち、スイッチング素子T1b、T3b、T5bは、三相ブリッジ回路のU相上アーム、V相上アーム、W相上アームに夫々挿入され、スイッチング素子T2b、T4b、T6bは、三相ブリッジ回路のU相下アーム、V相下アーム、W相下アームに夫々挿入されている。
モータ電流検出のために設けられたシャント抵抗Rub、Rvb、Rwbは、スイッチング素子T2b、T4b、T6bと車両のグランドレベルとの間に夫々接続されている。スイッチング素子T1b、T3b、T5bの共通接続部と車両のグランドレベルとの間に接続された平滑コンデンサC1b、C2b、C3bは、第2のインバータ回路511bに供給される電源電圧を平滑化するために設けられている。
スイッチング素子T1bとスイッチング素子T2bとの直列接続部であるU相交流端子は、モータ2の第2の固定子巻線2bのU相端子に接続され、スイッチング素子T3bとスイッチング素子T4bとの直列接続部であるV相交流端子は、第2の固定子巻線2bのV相端子に接続され、スイッチング素子T5bとスイッチング素子T6bとの直列接続部であるW相交流端子は、第2の固定子巻線2bのW相端子に接続されている。
スイッチング素子T1b、T3b、T5bにより夫々構成された三相ブリッジ回路の各相の上アームの一端は、相互に共通接続されて第2のインバータ回路511bの正極側直流端子を構成し、第2のリレー54b、及びチョークコイル13を介して、バッテリ12の正極側端子に接続される。一方、スイッチング素子T2b、T4b、T6bにより夫々構成された三相ブリッジ回路の各相の下アームの一端は、第2のインバータ回路511bの負極側直流端子を構成し、夫々シャント抵抗シャント抵抗Rub、Rvb、Rwbを介して車両のグランドレベルに接続されている。
制御基板3に搭載されたCPU31は、車両に搭載されたセンサ類11からの情報によりモータ2を駆動する目標電流値に相当する制御量を演算し、その演算した制御量を、ライン32を介して第1及び第2のインバータ回路511a、511bの各スイッチング素子のゲートに与え、これ等のスイッチング素子をPWM制御する。
モータ2は、第1のインバータ回路511a、及び第2のインバータ回路511bによりPWM制御された三相交流電力により駆動され、所望のアシストトルクを発生して前述のギア部8を介してステアリング軸(図示せず)に加える。CPU31により演算された目標電流制御量は、第1のインバータ回路511aと第2のインバータ回路511bに振り分けられ、第1の固定子巻線2aと第2の固定子巻線2bとで電流量を分担する。この分担割合は任意に設定可能である。
第1のインバータ回路511aのU相交流端子、V相交流端子、及びW相交流端子から取り出された第1の固定子巻線2aのU相端子電圧Mua、V相端子電圧Mva、W相端子電圧Mwaは、夫々、信号ライン33を介してCPU31へ入力される。又、第1のインバータ回路511aの各シャント抵抗Rua、Rva、Rwaと各スイッチング素子T2a、T4a、T6aとの接続部から取り出された、第1の固定子巻線2aに流れるU相モータ電流Iua、V相モータ電流Iva、W相モータ電流Iwaは、信号ライン33を介してCPU31へ入力される。
同様に、第2のインバータ回路511bのU相交流端子、V相交流端子、及びW相交流端子から取り出された第2の固定子巻線2bのU相端子電圧Mub、V相端子電圧Mvb、W相端子電圧Mwbは、夫々、信号ライン33を介してCPU31へ入力される。又、第2のインバータ回路511bの各シャント抵抗Rub、Rvb、Rwbと各スイッチング素子T2b、T4b、T6bとの接続部から取り出された、第2の固定子巻線2bに流れるU相モータ電流Iub、V相モータ電流Ivb、W相モータ電流Iwbは、信号ライン33を介してCPU31へ入力される。
以上のように構成されたこの発明の実施の形態4による電動パワーステアリング装置に於いて、CPU31からの出力に基づいて、例えば所定の分担量に基づいて、第1の固定子巻線2aと第2の固定子巻線2bの電流量を制御し、所望のアシストトルクをモータ2に発生させる。即ち、CPU31は、前述したようにセンサ類11から入力されるドライバによる操舵トルクと車速等の情報に基づいて、モータ2の目標電流制御量を算出し、その算出した目標電流制御量に対する前述の分担量に対応したゲート信号を、信号ライン32を介して第1のインバータ回路511aの各スイッチング素子のゲートに与え、これ等のスイッチング素子をPWM制御する。同様に、前述の算出した目標電流制御量に対する前述の分担量に対応したゲート信号を、信号ライン32を介して第2のインバータ回路511bの各スイッチング素子のゲートに与え、これ等のスイッチング素子をPWM制御する。
このようにして駆動されるモータ2は、運転者の操舵トルクと車速に対応したアシストトルクを発生して出力軸24からギア部8を介してステアリング軸に加えられる。
尚、CPU31からの指令により第1及び第2のリレー54a、54bの開閉を制御し、第1のインバータ回路511a、又は第2のインバータ回路511bのうちの何れか一方のみを選択してモータ2を駆動するようにし、他方の系統を休止状態とすることも可能である。
次に、中継部材4について説明する。図10は、この発明の実施の形態4による電動パワーステアリング装置に於ける、中継部材の平面図、図11は、図10のA-A線に沿って矢印方向から視た断面図である。図8、図10、及び図11に於いて、中継部材4は、図10に良く示されているように略円形をなし、全体が絶縁性樹脂により構成されている。
前述の第1及び第2の突起41a、41bは、複数ずつ設けられ、夫々第1及び第2の突起41a、41bは、第1及び第2のパワーモジュール51a、51bに対して相互に間隔を介して設けられている。中継部材4の軸線方向の両端面に相当する両側の面部には、夫々軸線方向に突出する複数個の脚部42が設けられている。これ等の脚部42のうち、中継部材4に於ける制御基板3側の面部に設けられた4個の脚部42には、更に軸線方向に延びる円筒部421が形成されており、これ等の円筒部421が制御基板3に設けられた穴に挿入され、制御基板3の位置決めと支持を行なう。
中継部材4には、第1のパワーモジュール51aに接続される複数の第1の導電体48aと、第2のパワーモジュール51bに接続される複数の第2の導電体48bとが埋設されている。中継部材4に埋設された複数の第1の導電体48aの一部分は、中継部材4の切欠部から露出して第1のパワーモジュール51aに接続される複数の第1の電源端子46aとなる。同様に、中継部材4に埋設された複数の第2の導電体48bの一部分は、中継部材4の切欠部から一部分が露出して第2のパワーモジュール51bに接続される複数の第2の電源端子46bとなる。中継部材4に埋設された複数の第1の導体48aと複数の第2の導電体48bは、夫々、バッテリ等の電源に接続される電源ラインと車両のグランドレベルに接続されるグランドラインとなる。
中継部材4の中央部に設けられた中心穴402は、モータ2の出力軸24により貫通され、その中心穴402の周囲にはガイド部43が形成されている。このガイド部43には軸線方向に貫通する第1及び第2の小穴49a、49bが複数個ずつ設けられている。これ等の小穴49a、49bには、第1及び第2のパワーモジュール51a、51bからの導体ピンが挿入される。又、巻線端25a、25bが貫通する複数の矩形穴45a、45bを夫々備えたガイド部としての第1及び第2の衝立状ガイド44a、44bが中継部材4の両端縁部に夫々設けられている。前述の矩形状の穴45a、45bは、3個ずつ設けられており、これ等の矩形穴45a、45bに巻線端25a、25bを夫々貫通させることにより、巻線端25a、25bに対するガイドと位置決めが行なわれるように構成されている。
更に、中継部材4の一部には、車両からの電気配線、例えばセンサ信号、電源、グランドラインを導く複数個の導体ピン47が軸線方向に突出するように設けられている。
前述の第1のインバータ回路511aの平滑コンデンサC2a、C3aは、中継部材4の中心部に対して図10の左側上部に並置されて中継部材4に実装され、平滑コンデンサC1aは、中継部材4の中心部に対して図10の左側下部に配置され中継部材4に実装されている。第2のインバータ回路511bの平滑コンデンサC2b、C3bは、中継部材4の中心部に対して図3の右側上部に並置され中継部材4に実装されると共に、平滑コンデンサC1bは、中継部材4の中心部に対して図10の右側下部に配置されて中継部材4に実装されている。
チョークコイル13は、環状鉄心131の周面に導体を巻回(図10には、巻回の一部分のみを示している)して構成されており、中継部材4の中心部に対して図10の下部に実装されている。
又、チョークコイル13、及び、平滑コンデンサC1a、C2a、C3a、C1b、C2b、C3bから、夫々リード線が延出されている。これ等のリード線は、曲げられて中継部材4に設けられた穴に挿入され、その穴から露出している第1及び第2の導電体48a、48bに電気的に接続されている。
図8、図10、及び図11から明らかなように、各平滑コンデンサC1a、C2a、C3a、C1b、C2b、C3b、及びチョークコイル13は、中継部材4の反ヒートシンク側の面部に実装されており、後述するようにヒートシンク5に固定された第1及び第2のパワーモジュール51a、51が発生する熱の影響を受け難く、熱的に有利な配置となっている。
チョークコイル13は、回路上の配置位置の関係から、第1及び第2の電源端子46a、46bの近傍に配置される。一方、各平滑コンデンサは、所属する第1及び第2のインバータ回路511a、511b毎に分離して配置され、且つ、U相、V相、W相の平滑コンデンサは夫々を離間して配置されている。
尚、各系統の平滑コンデンサがほぼ同様な形態で対称的に配置されていることを、平滑コンデンサの均等配置と称するが、この均等配置は、中継部材4に対して線対称、点対称のみに限定されるものではなく、他の均等配置としてもよいことは勿論である。
図11に示すように、中継部材4の反ヒートシンク側の面部には、大型部品である各平滑コンデンサC1a、C2a、C3a、C1b、C2b、C3b、及びチョークコイル13を固定するために、多数の支柱401が軸線方向に延びるように設けられている。各平滑コンデンサC1a、C2a、C3a、C1b、C2b、C3b、及びチョークコイル13は、これ等の支柱401に挟まれて配置されることで、固定並びに位置決めされている。
尚、平滑コンデンサは、3個ずつを1組として、前述の配置形態とは別の配置形態としてもよい。更に、平滑コンデンサがより小型に構成されていれば、その配置方法は無数に存在するが、第1のインバータ回路511aに属する平滑コンデンサと第2のインバータ回路511bに属する平滑コンデンサとは、均等配置とすることが望まれる。例えば出力軸24を中心とする対称配置、若しくは中継部材4の中央に対する対称配置とすれば、重心的観点及び配線の容易性の観点からも望ましいものとなる。
又、平滑コンデンサC1a、C2a、C3a、C1b、C2b、C3b、及びチョークコイル13は、第1及び第2のパワーモジュール51a、51bに比べ発熱は少ないものの、やはり発熱するので、ヒートシンク5から離れた位置に夫々を均等に配置することが望ましい。図10及び図11に示すように、平滑コンデンサC1a、C2a、C3a、C1b、C2b、C3b、及びチョークコイル13は、中継部材4の表面に対してモータの軸線方向に対して略垂直に配置(以下、この配置を、横置き、と称する)されており、従って、中継部材4の軸線方向に突出する各平滑コンデンサ及びチョークコイルの高さ方向の寸法を短くすることができ、第1及び第2のパワーモジュール51a、51bと制御基板3との距離も短くすることができる。つまり、平滑コンデンサC1a、C2a、C3a、C1b、C2b、C3b、及びチョークコイル13は、縦横の寸法のうち小さい方を軸線方向に向けるように配置するのがよい。
更に、前述では中継部材4と制御基板3の間に、電気的素子である平滑コンデンサとチョークコイルを配置したが、全ての平滑コンデンサとチョークコイルを中継部材4とヒートシンク5との間に配置してもよい。但し、この場合は、各パワーモジュール51a、51bの発熱を考慮し、平滑コンデンサとチョークコイルとの間に適当な空間を設けるように配置することが望ましい。或いは、平滑コンデンサの一部とチョークコイルを中継部材4と制御基板3との間に配置し、残りの平滑コンデンサを中継部材4とヒートシンク5との間に配置するようにした分散配置とすることも可能である。
各シャント抵抗Rua、Rva、Rwa、Rub、Rvb、Rwbは、それらの高さ方向寸法つまり最大外形寸法が、平滑コンデンサ及びチョークコイルの高さ方向寸法つまり最大外形寸法より小さいので、配線を考慮した上で中継部材4の何れの表面に実装しても良い。又、シャント抵抗は各相に1個ずつではなく、まとめて1個の計2個、又は1相のみ削除して2個ずつの構成であっても制御上可能である。
次に、発熱の大きなパワー素子である前述のスイッチング素子を内蔵した第1及び第2のパワーモシュール51a、51b等の配置について説明する。図8は、ヒートシンク5の前述の他端面(図8の下側の端面)側の平面に、第1及び第2のパワーモジュール51a、51bが密着して固定されている状態を示している。
ヒートシンク5には、第1及び第2のパワーモジュール51a、51bの他に、前述の第1及び第2のリレー54a、54bが搭載されているが、図8には図示されていない。第1及び第2のパワーモシュール51a、51bと、第1及び第2のリレー54a、54bは、大電流を流すことにより発熱量が大きく、放熱効果を大きくしないと大電流を流すことはできない。制御装置6全体は、モータ2の図8に於ける上部に配置され、制御装置6を構成する各部品がモータ2に一体に固定されており、更に、略円形をなしたヒートシンク5は、制御装置6のハウジング7に固定されている。
第1のパワーモジュール51aと第2のパワーモジュール51bは、ヒートシンク5の平面のほぼ全面に、中心を挟んで両側に均等に配置されている。そして、第1及び第2のパワーモジュール51a、51bは、ヒートシンク5との接触面積を大きくするためにヒートシンク5の外形形状に沿うように略扇形をなしている。電子リレーとしての第1及び第2のリレー54a、54bは、樹脂モールド部材により長方形、又は略扇形にモールドされ、夫々略扇形に形成された第1及び第2のパワーモジュール51a、51bの間に配置され、ヒートシンク5の他端面(図8の下側の端面)側の平面に密着して固定されている。
尚、FETからなる6個ずつのスイッチング素子T1a~T6a、T1b~T6bを、夫々1つのパッケージに内蔵して第1及び第2のパワーモジュール51a、51bを形成した場合について説明したが、これに限らず、パワーモジュールに内蔵する回路は種々の形態をとり得る。
図8に示すように、制御装置6は、モータ2の軸線方向に、モータ2とギア部8との間に配置され、制御装置6の中央にはモータ2の出力軸24が貫通している。このように構成された電動パワーステアリング装置1の組立て順は、先ず、中継部材4と第1及び第2のパワーモジュール51a、51bを重ね、更にその上に制御基板3を積み重ねて制御装置6を組付け、この制御装置6をモータ2の軸心方向に組合せて後、ハウジング7、及びヒートシンク5を組付け、最後にギア部8を一体化する順序となる。
或いは、別の組立て順序として、先ず、モータ2の上に制御基板3と、中継部材4と、第1及び第2のパワーモジュール51a、51bを順次積み重ね、次に、ハウジング7と、ヒートシンク5とを装着し、最後に、ギア部8を組付けるようにすることも可能である。更には、ハウジング7が複数に分割されている場合、ヒートシンク5の上部に(図8ではヒートシンクの下部)第1及び第2のパワーモジュール51a、51bを搭載し、次に、中継部材4と、制御基板3とを組み上げてモータ2と接続した後、ハウジング7と、ギア部8とを組付けるようにしてもよい。
以上のように、制御装置6は、ヒートシンク5、第1及び第2のパワーモジュール51a、51b、中継部材4、及び制御基板3との積層構造としており、最も発熱の大きな各パワーモジュール51a、51bをヒートシンク5に密着させている。従って、各パワーモジュール51a、51bが発生する熱をヒートシンク5からギア部8側へ伝導させることができ、放熱性に優れる。又、比較的大きな電気的素子である平滑コンデンサ及びチョークコイルを中継部材4に配置し、その間に空間を設けることにより、放熱性を向上させ、前述のように各部位を順々に組付けることができ、組付け性も向上する効果を奏する。
尚、前述の説明では、制御装置6をモータ2の出力側であるフロント側に搭載した場合を示したが、モータ2の反フロント側、つまりモータ2のリア側に制御装置6を搭載してもよく、この形態であれば、ヒートシンク、中継部材、制御基板にモータ出力軸用の穴を設ける必要がなく、各部品の面積を有効に利用できるものであり、大型部品の電気的素子の配置にもさらに自由度が広がる。尚、この形態の場合も中継部材に平滑コンデンサ等の電気的素子を前述と同様に横置きに均等配置する。
以上述べたように、この発明の実施の形態4による電動パワーステアリング装置によれば、制御装置をモータのフロント側若しくはリア側の何れに配置した場合であっても、平滑コンデンサ等の大型部品である電気的素子は、パワーモジュールから離れた中継部材に横置きすることにより、出力軸方向の長さを短くでき、ひいては装置の小型化を図ることができる。
実施の形態5.
次に、この発明の実施の形態5による電動パワーステアリング装置について説明する。図12は、この発明の実施の形態5による電動パワーステアリング装置に於ける、ヒートシンクの平面図である。図12に於いて、第1及び第2のパワーモジュール51a、51bは、円形のヒートシンク5の中心から図の左右に対称的に均等に配置されている。
次に、この発明の実施の形態5による電動パワーステアリング装置について説明する。図12は、この発明の実施の形態5による電動パワーステアリング装置に於ける、ヒートシンクの平面図である。図12に於いて、第1及び第2のパワーモジュール51a、51bは、円形のヒートシンク5の中心から図の左右に対称的に均等に配置されている。
又、第1及び第2のリレー54a、54bは、第1及び第2のパワーモジュール51a、51bの間でヒートシンク5に配置されている。尚、ここでは各パワーモジュール51a、51bは、2個の部品として示しているが、多数、例えば、1つのインバータ回路で3個以上のパワーモジュールとして構成してもよく、その場合であってもそれ等のパワーモジュールは、各系統について図12の第1及び第2のパワーモジュール51a、51bの位置の範囲へ、夫々が離間して均等に配置される。
図13は、この発明の実施の形態5による電動パワーステアリング装置に於ける、中継部材の平面図であって、ヒートシンク5に於ける第1及び第2のパワーモジュール51a、51bの配置が前述の図12に示す配置の場合に用いられる中継部材を示している。又、図13に於いて、実線Yの左側と右側とでは、電気的素子としての平滑コンデンサ及びチョークコイルの異なる配置を示している。
図13に於いて、チョークコイル13は、中継部材4の外縁部の2箇所に設けられている第1及び第2の衝立状ガイド44a、44bから遠い位置に配置されている。第1及び第2の衝立状ガイド44a、44bが設けられている位置に対応する中継部材4の反対側の面部に対向して、図12に示すように第1及び第2のパワーモジュール51a、51bがヒートシンク5の平面に配置されているため、平滑コンデンサC1a、C2a、C3a、及びC1b、C2b、C3bは、第1及び第2のパワーモジュール51a及び51bの配置付近に対向して図13の実線Yの右側若しくは左側のように配置され、系統毎に離間して配置されている。
図13の実線Yの左側の配置を採用する場合は、平滑コンデンサC1a、C2a、C3a、及びC1b、C2b、C3bは、横置きで、且つ中継部材4の中心部に対して夫々放射線状に配置される。図13の実線Yの右側の配置を採用する場合は、平滑コンデンサC1a、C2a、C3a、及びC1b、C2b、C3bは、横置きで、且つ図13の水平方向に夫々平行に配置される。
以上のように、第1及び第2のパワーモジュール51a、51bの配置位置に対応して夫々3個ずつの平滑コンデンサC1a、C2a、C3a、及びC1b、C2b、C3bを、各系統毎に均等配置し、更に、平滑コンデンサ相互は離間して配置されている。その他の電気的素子であるチョークコイル13は、図13に示すように平滑コンデンサC1a、C2a、C3aと、平滑コンデンサC1b、C2b、C3bとの間に配置されている。実線Yの左右何れの配置であっても、チョークコイル13と、平滑コンデンサC1a、C2a、C3aと、平滑コンデンサC1b、C2b、C3bとは、中継部材4に均等配置されている。
尚、その他の構成は、実施の形態4の場合と同様である。
以上述べたように、この発明の実施の形態5による電動パワーステアリング装置によれば、各パワーモジュールが固定子巻線に対して離間して配置され、これに対応して中継部材に電気的素子である平滑コンデンサ、チョークコイルも相互に離間して均等配置されることにより、制御装置の中の狭い空間を有効的に利用でき、又、軸線方向の寸法を小さくすることができる。
尚、この発明は、その発明の範囲内に於いて、各実施の形態を自由に組合わせたり、各実施の形態を適宜、変形、省略することが可能である。
この発明による電動パワーステアリング装置は、自動車産業の分野に於いて大なる利用が期待できる。
1 電動パワーステアリング装置、2 モータ、2a 第1の固定子巻線、
2b 第2の固定子巻線、21 固定子、22 回転子、25a 第1の巻線端、
25b 第2の巻線端、3 制御基板、31 CPU、4 中継部材、
11 センサ類、41a 第1の突起、41b 第2の突起、42 脚部、
421 脚部の円筒部、43 ガイド部、44a 第1の衝立状ガイド、
44b 第2の衝立状ガイド、45a 第1の矩形穴、45b 第2の矩形穴、
46a 第1の導体端子、46b 第2の導体端子、47 導体ピン、
48a 第1の導体、48b 第2の導体、49a 第1の小穴、
49b 第2の小穴、5 ヒートシンク、51a 第1のパワーモジュール、
51b 第2のパワーモジュール、512a、512b 外縁部、
52a、52b 巻線接続端子、513a、513b 内縁部、
514a、514b 側面部、501 中心穴、
56a、56b 電源ライン接続端子、57a、57b 制御端子、58 鍔部、
55ua、55va、55wa、55ub、55vb、55wb 抵抗接続端子、
6 制御装置、7 ハウジング、61a、61b 入力側端子、
62a、62b 出力側端子、63a、63b 制御端子、8 ギア部、
81、82 ベアリング、
T1a、T2a、T3a、T4a、T5a、T6a、T1b、T2b、T3b、T4b、
T5b、T6b、T1、T2、T3、T4 スイッチング素子、
Rua、Rva、Rwa、Rub、Rvb、Rwb、R シャント抵抗、
C1a、C2a、C3a、C1b、C2b、C3b 平滑コンデンサ、
12 バッテリ、13 チョークコイル、54a 第1のリレー、
54b 第2のリレー、401 支柱
2b 第2の固定子巻線、21 固定子、22 回転子、25a 第1の巻線端、
25b 第2の巻線端、3 制御基板、31 CPU、4 中継部材、
11 センサ類、41a 第1の突起、41b 第2の突起、42 脚部、
421 脚部の円筒部、43 ガイド部、44a 第1の衝立状ガイド、
44b 第2の衝立状ガイド、45a 第1の矩形穴、45b 第2の矩形穴、
46a 第1の導体端子、46b 第2の導体端子、47 導体ピン、
48a 第1の導体、48b 第2の導体、49a 第1の小穴、
49b 第2の小穴、5 ヒートシンク、51a 第1のパワーモジュール、
51b 第2のパワーモジュール、512a、512b 外縁部、
52a、52b 巻線接続端子、513a、513b 内縁部、
514a、514b 側面部、501 中心穴、
56a、56b 電源ライン接続端子、57a、57b 制御端子、58 鍔部、
55ua、55va、55wa、55ub、55vb、55wb 抵抗接続端子、
6 制御装置、7 ハウジング、61a、61b 入力側端子、
62a、62b 出力側端子、63a、63b 制御端子、8 ギア部、
81、82 ベアリング、
T1a、T2a、T3a、T4a、T5a、T6a、T1b、T2b、T3b、T4b、
T5b、T6b、T1、T2、T3、T4 スイッチング素子、
Rua、Rva、Rwa、Rub、Rvb、Rwb、R シャント抵抗、
C1a、C2a、C3a、C1b、C2b、C3b 平滑コンデンサ、
12 バッテリ、13 チョークコイル、54a 第1のリレー、
54b 第2のリレー、401 支柱
Claims (16)
- 独立した複数個の固定子巻線を備えたモータと、前記複数個の固定子巻線を個別に駆動する複数個の駆動回路を備えた制御装置とを備え、前記制御装置により駆動される前記モータの出力に基づいてドライバの操舵力をアシストするようにした電動パワーステアリング装置であって、
前記制御装置に配置され、前記モータの軸線方向に対して垂直に配置された面部を有する中継部材を備え、
前記複数個の駆動回路は、前記対応する固定子巻線への供給電力を制御するスイッチング素子からなる複数個のパワー素子を収納したパワーモジュールと、前記駆動回路の構成部品としての複数の電気的素子とを有し、
下記(1)と(2)とのうち少なくとも何れか一方を備えていることを特徴とする電動パワーステアリング装置。
(1)前記複数個の駆動回路のパワーモジュールは、その主面が前記モータの軸線方向に対して垂直となるように、前記中継部材の面部から離れた位置に配置されたヒートシンクに夫々装着されている。
(2)前記駆動回路の電気的素子は、その最大外形寸法の延びる方向が前記モータの軸線方向に対して垂直となるように前記中継部材の面部に装着されている。 - 前記パワーモジュールを装着したヒートシンクは、前記モータに対して前記モータの軸線方向に配置されると共に、前記軸線方向に対して垂直方向に延びる平面を備え、
前記複数個のパワーモジュールは、前記主面が前記ヒートシンクの前記平面に密着して固定されている、
ことを特徴とする請求項1記載の電動パワーステアリング装置。 - 前記ヒートシンクは、略円形に形成され、
前記複数個のパワーモジュールは、前記ヒートシンクの中心に対して略対称に配置されて前記ヒートシンクに装着されている、
ことを特徴とする請求項2記載の電動パワーステアリング装置。 - 前記制御装置は、前記パワーモジュールに収納された前記スイッチング素子を駆動する制御量を演算するマイクロコンピュータを搭載した制御基板を有し、
前記中継部材は、前記パワーモジュールと前記制御基板を電気的に接続するように構成され、
前記ヒートシンクと、前記パワーモジュールと、前記中継部材と、前記制御基板とは、前記モータの軸線方向に並置されている、
ことを特徴とする請求項2記載の電動パワーステアリング装置。 - 前記電気的素子は、前記中継部材の前記制御基板に対向する側の面部、又は前記ヒートシンクに対向する側の面部に装着されている、
ことを特徴とする請求項4記載の電動パワーステアリグ装置。 - 前記中継部材は、対向する両側の表面に、前記ヒートシンクと前記中継部材との間の間隔及び前記制御基板と前記中継部材との間の間隔を保持する脚部を備えている、
ことを特徴とする請求項4記載の電動パワーステアリング装置。 - 前記制御装置は、前記モータの軸線方向の端部に於いて前記モータのヨークに固定されたハウジングを備え、
前記複数個のパワーモジュールと前記中継部材と前記制御基板は、前記ハウジング内に収納されている、
ことを特徴とする請求項4記載の電動パワーステアリング装置。 - 前記中継部材は、少なくとも電源ラインとグランドラインとなる複数個の導電体を埋設しており、前記パワーモジュールから延出された電源ライン接続端子及びグランドライン接続端子と前記複数個の導電体とを接続させる、
ことを有することを特徴とする請求項4記載の電動パワーステアリング装置。 - 前記中継部材は、前記複数個のパワーモジュールを前記ヒートシンク側に押圧する突起を備えている、
ことを特徴とする請求項4記載の電動パワーステアリング装置。 - 前記パワーモジュール又は前記電気的素子は、その属する前記駆動回路毎に分離して対称的に配置されている、
ことを特徴とする請求項4記載の電動パワーステアリング装置。 - 前記制御装置は、前記複数個の駆動回路と電源との間に接続されるリレーとコイルとを有し、
前記リレーと前記コイルは、それ等の最大外形寸法の延びる方向が前記軸線方向に対して垂直となるように前記中継部材の前記面部に装着されている、
ことを特徴とする請求項2記載の電動パワーステアリング装置。 - 前記パワーモジュールは、少なくとも2個の前記パワー素子を含む複数個のパワーモジュールからなり、
前記複数個の駆動回路に於けるパワーモジュールは、前記複数個のパワーモジュールのうちの別々のパワーモジュールにより構成され、
前記複数個の固定子巻線の巻線端は、前記複数個の駆動回路のパワーモジュールに対応して各固定子巻線毎に分離し延出されている、
ことを特徴とする請求項2記載の電動パワーステアリング装置。 - 前記複数個の固定子巻線は、2個の3相固定子巻線からなり、
前記複数個の駆動回路は、前記2個の3相固定子巻線を個別に駆動する2個のインバータ回路からなり、
前記複数個のパワーモジュールは、少なくとも6個のパワー素子を夫々収納し、前記2個のインバータ回路を個別に構成する2個のパワーモジュールからなり、
前記2個のパワーモジュールは、前記ヒートシンクに対称的に配置されている、
ことを特徴とする請求項12記載の電動パワーステアリング装置。 - 前記各駆動回路の電気的素子は、複数個のコンデンサを少なくとも含み、
前記コンデンサは、その属する前記駆動回路毎に分離して対称的に配置されている、
ことを特徴とする請求項5記載の電動パワーステアリング装置。 - 前記モータの出力を減速するギア部を備え、
前記制御装置は、前記モータの軸線方向に、前記モータと前記ギア部との間に配置されている、
ことを特徴とする請求項2記載の電動パワーステアリング装置。 - 前記モータの出力を減速するギア部を備え、
前記モータは、前記モータの軸線方向に、前記制御装置と前記ギア部との間に配置されている、
ことを特徴とする請求項2記載の電動パワーステアリング装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/353,435 US9586615B2 (en) | 2012-01-25 | 2012-07-05 | Electric power steering apparatus |
| CN201280058725.5A CN103987611B (zh) | 2012-01-25 | 2012-07-05 | 电动动力转向装置 |
| EP12866931.4A EP2808226B1 (en) | 2012-01-25 | 2012-07-05 | Electric power steering device |
| IN3685CHN2014 IN2014CN03685A (ja) | 2012-01-25 | 2012-07-05 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012012577A JP5518107B2 (ja) | 2012-01-25 | 2012-01-25 | 電動パワーステアリング装置 |
| JP2012-012577 | 2012-01-25 | ||
| JP2012012578A JP5518108B2 (ja) | 2012-01-25 | 2012-01-25 | 電動パワーステアリング装置 |
| JP2012-012578 | 2012-01-25 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013111365A1 true WO2013111365A1 (ja) | 2013-08-01 |
Family
ID=48873117
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/067190 WO2013111365A1 (ja) | 2012-01-25 | 2012-07-05 | 電動パワーステアリング装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9586615B2 (ja) |
| EP (1) | EP2808226B1 (ja) |
| CN (1) | CN103987611B (ja) |
| IN (1) | IN2014CN03685A (ja) |
| WO (1) | WO2013111365A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3124356A4 (en) * | 2014-03-26 | 2018-01-10 | Mitsubishi Electric Corporation | Electric power steering device |
| WO2018096596A1 (ja) * | 2016-11-22 | 2018-05-31 | 三菱電機株式会社 | 回転電動機 |
| EP3220521A4 (en) * | 2014-11-13 | 2018-06-20 | Mitsubishi Electric Corporation | Control unit and electric power steering device using same |
| US10236750B2 (en) | 2014-02-14 | 2019-03-19 | Mitsubishi Electric Corporation | Rotating electric machine with a built-in control device and electric power assist steering system |
| WO2020039572A1 (ja) * | 2018-08-24 | 2020-02-27 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| CN110971046A (zh) * | 2018-09-28 | 2020-04-07 | 日本电产株式会社 | 电动泵装置 |
| US10629521B2 (en) | 2014-04-08 | 2020-04-21 | Mitsubishi Electric Corporation | Molded module |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2555121T3 (es) * | 2013-07-08 | 2015-12-29 | Fagor, S. Coop. | Dispositivo de accionamiento eléctrico |
| US10926790B2 (en) | 2014-02-05 | 2021-02-23 | Nidec Elesys Corporation | Vehicle-mounted electronic control unit and vehicle-mounted mechanically/electrically integrated electric motor |
| EP3141459B1 (en) * | 2014-05-08 | 2020-08-26 | Mitsubishi Electric Corporation | Electric power steering device |
| WO2016024358A1 (ja) * | 2014-08-15 | 2016-02-18 | 三菱電機株式会社 | 制御ユニットおよびこれを用いた電動パワーステアリング装置、並びに制御ユニットの製造方法 |
| JP6376917B2 (ja) * | 2014-09-18 | 2018-08-22 | 日立オートモティブシステムズ株式会社 | 電子制御装置及び電動パワーステアリング装置 |
| JP6223593B2 (ja) * | 2014-10-22 | 2017-11-01 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| EP3240026A4 (en) | 2014-12-24 | 2018-09-05 | NSK Ltd. | Power semiconductor module and electric power steering device employing same |
| EP3249789B1 (en) * | 2015-01-23 | 2020-07-01 | Mitsubishi Electric Corporation | Electric drive device |
| JP6366809B2 (ja) * | 2015-02-18 | 2018-08-01 | 三菱電機株式会社 | 一体型電動パワーステアリング装置 |
| EP3291424B1 (en) * | 2015-04-27 | 2019-11-06 | Mitsubishi Electric Corporation | Control device |
| EP3306791A4 (en) * | 2015-05-29 | 2018-12-12 | Shindengen Electric Manufacturing Co., Ltd. | Semiconductor device and method for mounting semiconductor device |
| CN107852071B (zh) * | 2015-07-27 | 2020-07-24 | 株式会社日立产机系统 | 旋转电机 |
| US10673309B2 (en) * | 2015-08-05 | 2020-06-02 | Mitsubishi Electric Corporation | Inverter-integrated motor |
| JP6595269B2 (ja) * | 2015-09-07 | 2019-10-23 | 日立オートモティブシステムズ株式会社 | 電動駆動装置及び電動パワーステアリング装置 |
| WO2017046841A1 (ja) * | 2015-09-14 | 2017-03-23 | ルネサスエレクトロニクス株式会社 | 電子装置 |
| US10500708B2 (en) | 2015-10-14 | 2019-12-10 | Black & Decker Inc. | Power tool |
| DE102015222266A1 (de) * | 2015-11-11 | 2017-05-11 | Robert Bosch Automotive Steering Gmbh | Elektromechanischer Stellantrieb mit redundantem elektronischen Teilsystem |
| JP6637518B2 (ja) * | 2015-11-27 | 2020-01-29 | 株式会社日立製作所 | 機電一体モータ |
| JP6529459B2 (ja) * | 2016-04-06 | 2019-06-12 | 日立オートモティブシステムズ株式会社 | モータ駆動装置、及びこれを用いた電動パワーステアリング装置 |
| CN109070933B (zh) * | 2016-04-06 | 2021-03-19 | 三菱电机株式会社 | 电动助力转向装置 |
| DE102016212862A1 (de) * | 2016-07-14 | 2018-01-18 | Robert Bosch Gmbh | Leistungseinheit für ein elektrisches Lenksystem |
| US10286807B2 (en) | 2016-09-15 | 2019-05-14 | Ford Global Technologies, Llc | Location-based electric vehicle preemptive cooling for DC fast charge |
| US10300609B2 (en) * | 2016-12-15 | 2019-05-28 | Boston Dynamics, Inc. | Motor and controller integration for a legged robot |
| US11565741B2 (en) * | 2017-10-13 | 2023-01-31 | Mitsubishi Electric Corporation | Electric power steering device |
| DE102018004358A1 (de) * | 2018-06-02 | 2019-12-05 | Franka Emika Gmbh | Antriebsvorrichtung für einen Manipulator |
| US11705786B1 (en) * | 2018-07-23 | 2023-07-18 | Hydro-Gear Limited Partnership | Power and control assembly for an electric drive apparatus |
| KR20200058241A (ko) * | 2018-11-19 | 2020-05-27 | 엘지전자 주식회사 | 전기 자동차의 동력 장치 |
| WO2020179009A1 (ja) * | 2019-03-06 | 2020-09-10 | 三菱電機株式会社 | 電動機、送風機、空気調和装置および電動機の製造方法 |
| JP6608555B1 (ja) * | 2019-05-17 | 2019-11-20 | 三菱電機株式会社 | 駆動装置、および電動パワーステアリング装置 |
| CN113068346A (zh) * | 2021-03-30 | 2021-07-02 | 电子科技大学成都学院 | 一种微电子定位装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1997033359A1 (fr) * | 1996-03-07 | 1997-09-12 | Seiko Epson Corporation | Moteur et son procede de fabrication |
| JP2001250910A (ja) * | 2000-03-03 | 2001-09-14 | Mitsubishi Electric Corp | パワーモジュール |
| JP2002320392A (ja) * | 2001-04-20 | 2002-10-31 | Denso Corp | パワーモジュール型インバータ装置 |
| JP2009248864A (ja) | 2008-04-09 | 2009-10-29 | Mitsubishi Electric Corp | 電動式パワーステアリング装置及びその製造方法 |
| JP2010028925A (ja) * | 2008-07-16 | 2010-02-04 | Asmo Co Ltd | モータ及び電動パワーステアリング装置用モータ |
| JP2011030405A (ja) | 2009-06-24 | 2011-02-10 | Denso Corp | 駆動装置 |
| JP2011217466A (ja) * | 2010-03-31 | 2011-10-27 | Mitsubishi Electric Corp | 電動式駆動装置 |
| JP2011250618A (ja) * | 2010-05-28 | 2011-12-08 | Denso Corp | 電動機駆動装置、および、それを用いた電動パワーステアリング装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3774624B2 (ja) * | 2000-10-18 | 2006-05-17 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| US7199496B2 (en) * | 2005-01-18 | 2007-04-03 | Oriental Motor Boston Technology Group Incorporated | Integrated electric motor and drive, optimized for high-temperature operation |
| WO2009125506A1 (ja) | 2008-04-07 | 2009-10-15 | 三菱電機株式会社 | 制御装置一体型電動パワーステアリング装置用モータおよび電動パワーステアリング装置 |
| JP5435286B2 (ja) | 2009-06-24 | 2014-03-05 | 株式会社デンソー | 駆動装置 |
| JP5516066B2 (ja) | 2009-06-24 | 2014-06-11 | 株式会社デンソー | 駆動装置 |
| JP5435285B2 (ja) | 2009-06-24 | 2014-03-05 | 株式会社デンソー | 駆動装置 |
| JP5435284B2 (ja) | 2009-06-24 | 2014-03-05 | 株式会社デンソー | 駆動装置 |
| JP5039171B2 (ja) * | 2010-05-11 | 2012-10-03 | 三菱電機株式会社 | 電動式駆動装置およびその電動式駆動装置を搭載した電動式パワーステアリング装置 |
| WO2012056735A1 (ja) | 2010-10-27 | 2012-05-03 | 三菱電機株式会社 | 電動パワーステアリング用モータ駆動制御装置 |
| WO2012137333A1 (ja) * | 2011-04-07 | 2012-10-11 | 三菱電機株式会社 | モールドモジュール、及び電動パワーステアリング装置 |
| US9088196B2 (en) * | 2011-05-20 | 2015-07-21 | Mitsubishi Electric Corporation | Motor drive device for electric power steering apparatus |
| EP2757665B1 (en) | 2011-09-12 | 2017-03-01 | Mitsubishi Electric Corporation | Electric drive device |
-
2012
- 2012-07-05 EP EP12866931.4A patent/EP2808226B1/en not_active Not-in-force
- 2012-07-05 US US14/353,435 patent/US9586615B2/en active Active
- 2012-07-05 CN CN201280058725.5A patent/CN103987611B/zh not_active Expired - Fee Related
- 2012-07-05 WO PCT/JP2012/067190 patent/WO2013111365A1/ja active Application Filing
- 2012-07-05 IN IN3685CHN2014 patent/IN2014CN03685A/en unknown
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1997033359A1 (fr) * | 1996-03-07 | 1997-09-12 | Seiko Epson Corporation | Moteur et son procede de fabrication |
| JP2001250910A (ja) * | 2000-03-03 | 2001-09-14 | Mitsubishi Electric Corp | パワーモジュール |
| JP2002320392A (ja) * | 2001-04-20 | 2002-10-31 | Denso Corp | パワーモジュール型インバータ装置 |
| JP2009248864A (ja) | 2008-04-09 | 2009-10-29 | Mitsubishi Electric Corp | 電動式パワーステアリング装置及びその製造方法 |
| JP2010028925A (ja) * | 2008-07-16 | 2010-02-04 | Asmo Co Ltd | モータ及び電動パワーステアリング装置用モータ |
| JP2011030405A (ja) | 2009-06-24 | 2011-02-10 | Denso Corp | 駆動装置 |
| JP2011217466A (ja) * | 2010-03-31 | 2011-10-27 | Mitsubishi Electric Corp | 電動式駆動装置 |
| JP2011250618A (ja) * | 2010-05-28 | 2011-12-08 | Denso Corp | 電動機駆動装置、および、それを用いた電動パワーステアリング装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2808226A4 |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10236750B2 (en) | 2014-02-14 | 2019-03-19 | Mitsubishi Electric Corporation | Rotating electric machine with a built-in control device and electric power assist steering system |
| DE112014006362B4 (de) | 2014-02-14 | 2022-08-18 | Mitsubishi Electric Corp. | Rotierende elektrische maschine mit einer eingebauten steuerungseinrichtung und elektrisches servounterstützungs-lenksystem mit einer solchen rotierenden elektrischen maschine |
| EP3124356A4 (en) * | 2014-03-26 | 2018-01-10 | Mitsubishi Electric Corporation | Electric power steering device |
| US10211709B2 (en) | 2014-03-26 | 2019-02-19 | Mitsubishi Electric Corporation | Electric power steering device |
| US10629521B2 (en) | 2014-04-08 | 2020-04-21 | Mitsubishi Electric Corporation | Molded module |
| US10523091B2 (en) | 2014-11-13 | 2019-12-31 | Mitsubishi Electric Corporation | Control unit and electric power steering device employing control unit |
| EP3220521A4 (en) * | 2014-11-13 | 2018-06-20 | Mitsubishi Electric Corporation | Control unit and electric power steering device using same |
| JPWO2018096596A1 (ja) * | 2016-11-22 | 2019-03-22 | 三菱電機株式会社 | 回転電動機 |
| US11025140B2 (en) | 2016-11-22 | 2021-06-01 | Mitsubishi Electric Corporation | Rotary electric machine having heat sink for semiconductor device of controller |
| WO2018096596A1 (ja) * | 2016-11-22 | 2018-05-31 | 三菱電機株式会社 | 回転電動機 |
| WO2020039572A1 (ja) * | 2018-08-24 | 2020-02-27 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| JP7094371B2 (ja) | 2018-08-24 | 2022-07-01 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| JPWO2020039572A1 (ja) * | 2018-08-24 | 2021-05-13 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| US12155276B2 (en) | 2018-08-24 | 2024-11-26 | Mitsubishi Electric Corporation | Electric power steering apparatus |
| CN110971046A (zh) * | 2018-09-28 | 2020-04-07 | 日本电产株式会社 | 电动泵装置 |
| US11245302B2 (en) | 2018-09-28 | 2022-02-08 | Nidec Corporation | Electric pump apparatus |
| CN110971046B (zh) * | 2018-09-28 | 2022-02-01 | 日本电产株式会社 | 电动泵装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140326530A1 (en) | 2014-11-06 |
| CN103987611A (zh) | 2014-08-13 |
| EP2808226B1 (en) | 2017-10-04 |
| EP2808226A1 (en) | 2014-12-03 |
| EP2808226A4 (en) | 2016-04-06 |
| IN2014CN03685A (ja) | 2015-07-03 |
| CN103987611B (zh) | 2017-03-08 |
| US9586615B2 (en) | 2017-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2013111365A1 (ja) | 電動パワーステアリング装置 | |
| JP5518108B2 (ja) | 電動パワーステアリング装置 | |
| JP5170711B2 (ja) | コントローラ | |
| JP5067679B2 (ja) | 半導体モジュール、および、それを用いた駆動装置 | |
| JP5435284B2 (ja) | 駆動装置 | |
| JP5201171B2 (ja) | 半導体モジュール、および、それを用いた駆動装置 | |
| JP7210283B2 (ja) | 回転電動機 | |
| JP5516066B2 (ja) | 駆動装置 | |
| JP5012953B2 (ja) | 駆動装置 | |
| JP5435285B2 (ja) | 駆動装置 | |
| CN108137084B (zh) | 一体型电动助力转向装置及其制造方法 | |
| JP6052244B2 (ja) | モータ並びにそれを搭載した電動パワーステアリング装置及び車両 | |
| WO2010150527A1 (ja) | 駆動装置 | |
| KR20100122955A (ko) | 전동 파워 스티어링 장치, 및 제어 장치 일체형 전동기 | |
| JP5518107B2 (ja) | 電動パワーステアリング装置 | |
| JP2016226125A (ja) | バスバーの接続構造及びモータユニット | |
| JP2020014380A (ja) | 電動駆動装置 | |
| JP6818903B2 (ja) | 電動パワーステアリング装置 | |
| JP2016226126A (ja) | 端子の接続構造及びモータユニット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12866931 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14353435 Country of ref document: US |
|
| REEP | Request for entry into the european phase |
Ref document number: 2012866931 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2012866931 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |