WO2012137355A1 - 運転支援システム - Google Patents
運転支援システム Download PDFInfo
- Publication number
- WO2012137355A1 WO2012137355A1 PCT/JP2011/058948 JP2011058948W WO2012137355A1 WO 2012137355 A1 WO2012137355 A1 WO 2012137355A1 JP 2011058948 W JP2011058948 W JP 2011058948W WO 2012137355 A1 WO2012137355 A1 WO 2012137355A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- driving support
- curvature
- curve
- driver
- moving body
- Prior art date
Links
- 238000005516 engineering process Methods 0.000 abstract description 3
- 238000000034 method Methods 0.000 description 35
- 230000002040 relaxant effect Effects 0.000 description 11
- 230000001133 acceleration Effects 0.000 description 9
- 238000004364 calculation method Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 3
- 238000002474 experimental method Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/0066—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator responsive to vehicle path curvature
- B60K31/0075—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator responsive to vehicle path curvature responsive to vehicle steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/16—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger operated by remote control, i.e. initiating means not mounted on vehicle
- B60T7/18—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger operated by remote control, i.e. initiating means not mounted on vehicle operated by wayside apparatus
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18145—Cornering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F7/00—Methods or arrangements for processing data by operating upon the order or content of the data handled
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/12—Lateral speed
- B60W2520/125—Lateral acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/20—Road profile, i.e. the change in elevation or curvature of a plurality of continuous road segments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/30—Road curve radius
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/60—Traffic rules, e.g. speed limits or right of way
Definitions
- the present invention detects a danger when a moving body such as an automobile travels on a curve having a curvature changing portion whose curvature radius changes according to a predetermined function and a curvature fixing portion whose curvature radius is constant.
- the present invention relates to a driving support system that supports driving.
- CSWS curve speed excess warning system
- ACC auto cruise control
- LKA lane keeping assist system
- PCS pre-crash safety
- CSWS curve speed excess warning system
- ACC auto cruise control
- LKA lane keeping assist system
- PCS pre-crash safety
- a curve or an obstacle existing in the traveling path of the automobile is detected, an optimum speed is calculated based on the obstacle information and the curve information, and the slot is set when the automobile speed is larger than the optimum speed.
- a system that decelerates an automobile to an optimum speed or less by controlling a mechanism and an automatic transmission is known (for example, see Patent Document 1).
- the road shape is acquired by means for acquiring the road shape, and the technology for calculating the curvature radius of the road, and when the vehicle speed is excessively high based on the calculated curvature radius, the vehicle is decelerated from before the curve, or A technique for issuing an alarm is already known.
- the present invention has been made in view of the above circumstances, and an object of the present invention is to provide appropriate driving assistance to a driver of a moving object when it is more necessary in a road curve or the like. Is to provide technology.
- the present invention obtains information on the shape of a curve whose radius of curvature changes according to a predetermined function, and provides driving assistance to the driver based on the obtained information on the shape of the curve. Determining the timing to perform is the greatest feature.
- curve information acquisition means for acquiring information about the shape of the curvature variation portion in a road having a curvature variation portion whose curvature radius changes according to a predetermined function
- Driving support means for providing driving support to the driver when the moving body moves through the curvature changing section
- Driving assistance control means for determining the timing at which the driving assistance means performs driving assistance based on the information about the shape of the curvature fluctuation portion obtained by the curvature fluctuation information obtaining means; It is characterized by providing.
- the curve of the curvature fluctuation section usually has a traveling distance or traveling time of this degree. Has a sense of ending.
- the driver commits an error in the steering wheel operation or acceleration / deceleration operation, resulting in danger. There are many cases.
- the curve information acquisition means acquires information about the shape of the curvature variation portion, and determines when to perform driving support for the driver based on the acquired information. I made it. According to this, it becomes possible to perform driving assistance to the driver when the moving body actually enters the curvature changing section and a danger occurs with a high probability. Therefore, it is possible to suppress the driver from feeling uncomfortable due to unnecessary driving assistance, and it is possible to perform the driving assistance accurately when a real danger occurs.
- the driving support control means may determine the timing at which the driving support means performs driving support based on the length of the curvature changing unit. Then, the length of the curvature variation part is longer than the driver's sense, and the risk that occurs when the driver determines that the curvature variation part has ended in the middle of the curvature variation part is suppressed. can do.
- the driving support control means may determine that the driving support means performs driving support when the length of the curvature changing unit is equal to or greater than a predetermined misunderstanding threshold. Good. By doing so, it is possible to make a driving support execution determination based on a clearer determination criterion.
- the misunderstanding threshold includes the minimum relaxation length according to the structure age of the traveling route of the moving body, the distribution of the length of the actual curvature variation portion on the traveling route of the moving body, and the moving body.
- the driver may be determined based on at least one of the lengths of the curvature changing portions that are misunderstood as having ended the curvature changing portions in the past. According to this, it becomes possible to implement driving support at a more appropriate timing in a situation that the driver really needs.
- the driving support control means may determine the timing at which the driving support means performs driving support based on the length of the curvature changing section and the speed of the moving body. Alternatively, the driving support control means may determine the timing at which the driving support means performs driving support based on the time during which the moving body moves through the curvature changing part according to the shape of the curvature changing part. .
- the timing of driving support is determined based on the information on the speed of the moving body in addition to the information on the length of the curvature variation unit. According to this, for example, even when the driving time from the moving body entering the curvature changing unit to the end of the curvature changing unit is longer than the driver's sense, driving based on the driving time.
- the timing for providing support can be determined, and more various judgments can be made.
- the driving support control means determines that the driving support means performs driving support when the time during which the moving body moves through the curvature changing unit is equal to or greater than a predetermined misunderstanding time threshold. You may do it.
- the misrecognition time threshold may be determined based on a time that the driver of the moving object misunderstood that the curvature variation unit has ended in the past.
- the content of the driving assistance may be automatic deceleration control of the speed of the moving body or lane keeping control in addition to an alarm that is issued to the driver.
- the means for solving the problems in the present invention can be used in combination as much as possible.
- Example 1 of this invention It is a block diagram which shows the driving assistance system in Example 1 of this invention. It is a figure for demonstrating the estimation process of the road shape in Example 1 of this invention. It is a flowchart which shows the road shape estimation routine in Example 1 of this invention. It is a flowchart which shows the warning execution determination routine in Example 1 of this invention. It is a flowchart which shows the error threshold value determination routine in Example 2 of this invention. It is a block diagram which shows the misunderstanding threshold determination routine 2 in Example 3 of this invention. It is a figure which shows distribution of the length of the curve relaxation part in Example 3 of this invention. It is a figure which shows the distribution of the relationship between the length Lclo of many curve relaxation parts 12 in Example 3 of this invention, and the largest horizontal G which arises in that case.
- Example 4 of this invention it is an example of the graph which showed the time change of each parameter when a real driver passes a curve. In Example 4 of this invention, it is another example of the graph which showed the time change of each parameter when a real driver passes a curve.
- FIG. 1 is a block diagram illustrating a schematic configuration of a vehicle driving support system according to the present embodiment.
- the system includes an ECU 3 that is an electronic control computer that controls the internal combustion engine.
- the ECU 3 includes a ROM, a RAM, a CPU, an input port, an output port, and the like (not shown), and a yaw rate sensor 4, a wheel speed sensor 5, a white line recognition camera 6, and a sign recognition camera 7 are electrically connected.
- a detection signal corresponding to the vehicle yaw rate is provided from the yaw rate sensor 4, and a wheel speed pulse synchronized with the rotation of the wheel is provided to the ECU 3 from the wheel speed sensor 12, respectively. Further, a white line that divides a traveling lane in the vicinity of the vehicle is photographed by the white line recognition camera 6, a road sign is photographed by the sign recognition camera 7, and each image information (imaging signal) is provided to the ECU 3.
- Various programs including a warning execution determination routine described later are stored in the ROM of the ECU 3 and are executed by the ECU 3.
- FIG. 2 is a diagram for explaining a road shape estimation process when the vehicle 1 reaches the curve of the road 10 while traveling.
- the curve of the road 10 is connected to the straight line portion 11, the curve relaxation portion 12 as a curvature variation portion that is connected to the straight portion 11 and the curvature radius gradually decreases, and is connected to the curve relaxation portion 12 so that the curvature radius is minimum and constant.
- It consists of a perfect circle curve portion 13. Although the tip of the perfect circle curve portion 13 is omitted in FIG. 1, it is connected to the exit-side straight line portion via an exit-side curve relaxation portion whose radius of curvature gradually increases.
- the shape of the curve relaxation portion 12 is determined by a clothoid curve.
- This clothoid curve is a curve in which the relationship between the distance L from the starting point of the curve and the radius of curvature R is expressed by the following equation (1).
- L ⁇ R A 2 (1)
- a 2 is a constant defining the shape of the clothoid curve.
- the vehicle 1 as a moving body is located in the curve relaxation portion 12.
- the front of the vehicle 1 is photographed by the white line recognition camera 6, and an image of the white line 10a is recognized from the photographed image information.
- the distance (white line lateral position) between the white line 10a and the vehicle 1 is calculated based on the captured image information, and the attitude of the vehicle 1 with respect to the white line 10a is calculated based on the calculation result.
- the speed Vs (t) of the vehicle 1 is acquired by detecting the yaw angle of the vehicle 1 from the detection signal from the yaw rate sensor 4 and detecting the wheel speed pulse from the wheel speed sensor 5.
- the distance Lp from the starting point of the curve relaxing unit 12 to the current position P of the vehicle 1 is acquired.
- Lp ⁇ Vs (t) dt (2)
- the shape of the white line 10a and the curvature radius Rp of the road at the current position P are calculated based on the attitude of the vehicle 1 with respect to the white line 10a and the travel locus. Since this calculation method uses a known method, the description thereof is omitted here.
- FIG. 3 shows a flowchart of the road shape estimation routine.
- This routine is one of programs stored in the ROM of the ECU 3, and is executed by the ECU 3 at predetermined intervals while the vehicle 1 is traveling.
- this routine is executed, first, in S101, the curvature radius Rp of the curve at the current position P is acquired based on the image of the white line recognition camera 6.
- S101 the curvature radius Rp of the curve at the current position P is acquired based on the image of the white line recognition camera 6.
- the processing of S101 ends, the process proceeds to S102.
- S102 it is determined whether or not the curve relaxation unit 12 has started. Specifically, determination is made based on whether or not the absolute value of Rp acquired in S101 is smaller than a predetermined threshold value Cst.
- Cst is a threshold value that determines that the curve relaxing unit 12 has not started when the absolute value of Rp is greater than this, and may be theoretically or experimentally determined in advance.
- the vehicle speed Vs (t) obtained from the detection signal of the wheel speed sensor 5 is used to calculate the distance Lp from the start point of the curve relaxing unit 12 to the current value P. Specifically, Lp is calculated by the above equation (2).
- the value of A 2 is calculated. Specifically, it is calculated by the above equation (3) from Rp acquired in S101 and Lp calculated in S103.
- the process of S104 ends, the process proceeds to S105.
- S105 whether the value of A 2 is converged is determined. Specifically, the A 2 when the last S105 is executed, or Ca is less than or not a threshold absolute value of the difference .DELTA.A 2 of A 2 is predetermined when the S105 to the current was run Determined. If a negative determination is made here, the process returns to S101. On the other hand, if a positive determination is made, the process proceeds to S106.
- Ca is a threshold value for determining that the value of A 2 is sufficiently stable and has no problem in accuracy when the absolute value of the difference ⁇ A 2 of A 2 is smaller than this, and is theoretically or experimentally determined in advance. It may be determined.
- the length Lclo of the curve relaxation part 12 is calculated by the above equation (4) as the length of the clothoid curve.
- the shape of the curve is calculated as in the above equations (5) and (6).
- this routine is once finished.
- the ECU 3 that executes the above road shape estimation routine, the yaw rate sensor 4, the wheel speed sensor 5, the white line recognition camera 6, and the sign recognition camera 7 constitute a curve information acquisition unit. Further, instead of the above, when acquiring information regarding the shape of a curve using a car navigation system, the car navigation system constitutes a curve information acquisition means.
- the danger is particularly caused when the driver mistakes the length of the curve to be shorter than the actual length and does not properly perform the steering operation and the deceleration operation.
- driving assistance is performed only when the length of the curve relaxing unit 12 is longer than a predetermined misunderstanding threshold.
- the case of issuing a warning to the driver will be described as an example of driving support.
- the content of the driving support itself is not limited to the warning, but other vehicle speed control (forced deceleration), lane keep control, etc. Of course, the content may be acceptable.
- FIG. 4 is an alarm execution determination routine in this embodiment.
- This routine is a program stored in the ROM of the ECU 3, and is executed every predetermined time while the engine is running.
- this routine is executed, first, in S201, it is determined whether or not the vehicle 1 has entered the curve. Specifically, as in the process of S102 of the road shape estimation routine shown in FIG. 3, the radius of curvature Rp at the position of the vehicle 1 in the curve relaxing unit 12 may be determined based on whether it is smaller than the threshold value Cst.
- a negative determination it is determined that the vehicle 1 is traveling on the straight line portion 11, and this routine is temporarily ended.
- an affirmative determination it is determined that the vehicle 1 has entered the curve alleviating unit 12, and thus the process proceeds to S202.
- S202 it is determined whether or not the speed of the vehicle 1 obtained by the outputs from the yaw rate sensor 4 and the wheel speed sensor 5 satisfies the following expression (7).
- Rreal is the radius of curvature of the perfect circle curve portion 13.
- ⁇ d is a dangerous lateral acceleration at which danger starts to occur in the driving of the vehicle 1, and is determined in advance through experiments or the like.
- the value of the dangerous lateral acceleration ⁇ d may be about 0.4 G, for example. If a negative determination is made in S202, it is determined that there is no need for an alarm at this point, so this routine is temporarily terminated. On the other hand, if a positive determination is made, the process proceeds to S203.
- the misrecognition threshold LE is a curve length as a threshold at which if the length of the curve alleviating unit 12 is longer than this, the driver tends to cause a risk of erroneous steering operation or acceleration / deceleration operation from a normal sense. That's it. How to determine this misunderstanding threshold LE will be described in detail later. If a negative determination is made in S203, it is determined that there is no need for an alarm, so this routine is immediately terminated.
- S204 an alarm is issued.
- means such as display on a display device in front of the driver's seat, warning lamp lighting, and voice notification are used.
- this routine is once ended.
- the ECU 3 that executes the processing of S204, the display device in front of the driver's seat (not shown), a warning lamp, a voice notification device, and the like constitute driving support means.
- the length Lclo of the curve relaxing unit 12 is calculated, and when the calculated length Lclo of the curve relaxing unit 12 is equal to or greater than a predetermined misunderstanding threshold LE, It was decided to issue a warning to the driver. According to this, it is possible to issue an alarm only when it is necessary to alert the driver, and it is possible to realize more accurate driving support.
- ECU3 which performs said warning execution determination routine comprises a driving assistance control means in a present Example.
- an alarm is issued when all of the three determinations of S201 to S203 are positively determined. However, it is not always necessary that all three determinations be positively determined. Absent. For example, when information related to the shape of the curve is acquired before entering the curve, the determination in S201 is not necessary. The determination in S202 is also auxiliary.
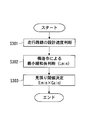
- FIG. 5 shows a flowchart of a misrecognition threshold determination routine in the present embodiment.
- the design speed of the road on which the vehicle 1 is traveling is obtained in S301. This is the traveling speed assumed in the design of the road, and may be determined in consideration of the location of the road and the use situation. Further, this design speed may be considered to substantially match the speed limit on roads other than urban areas where substantial execution of this routine is expected.
- the design speed may be obtained by capturing the image information of the road sign with the sign recognition camera 7, or the road width is obtained from the GPS information of the car navigation system, and the design speed is calculated backward from the obtained road width. You may acquire by the method to do.
- the process of S301 ends, the process proceeds to S302.
- the minimum relaxation length Lmin according to the structure order is obtained.
- This minimum relaxation Lmin is determined as the minimum value of the relaxation length of the curve that can be taken with respect to the road design speed according to the structure decree. Accordingly, the minimum relaxation length Lmin of the road on which the vehicle 1 is traveling can be obtained from the design speed value obtained in S302.
- the error threshold LE is calculated by multiplying Lmin by a coefficient Gain.
- Gain is a constant determined by experiments or the like in consideration of the driver's feeling, and may be a value of 1.5 to 2.5, for example.
- the design speed of the road that is running is obtained using the sign recognition camera 7 or the car navigation system, and the minimum relaxation length Lmin of the road that is running is obtained from the obtained design speed. Further, the error threshold LE is determined by multiplying the minimum relaxation length Lmin by an appropriate gain. According to this, it is possible to immediately obtain information on the road on which the vehicle 1 is actually traveling, and to determine a high accuracy error threshold LE in real time based on this information.
- Example 3 Next, another method for determining the misunderstanding threshold LE will be described.
- This method is a method of accumulating data of the length Lclo of the curve relaxation portion 12 of the road on which the vehicle 1 actually travels, and determining the misunderstanding threshold LE from the accumulated data.
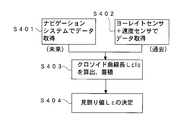
- FIG. 6 shows a flowchart for the misunderstanding threshold determination routine 2 used in this case.
- the values of Lp and Rp are obtained by the autonomous sensors such as the yaw rate sensor 4 and the wheel speed sensor 5 in the manner shown in the road shape estimation routine of FIG.
- the values of Lp and Rp are obtained from the GPS data of the car navigation system.
- either S401 or S402 may be performed. That is, the values of Lp and Rp may be obtained by either a method using an autonomous sensor or a method using a car navigation system.
- the length Lclo of the curve relaxation unit 12 is obtained by the calculation of S104 to S106 shown in FIG. 3, and this data is stored. To do.
- an error threshold LE is determined using the accumulated Lclo data.
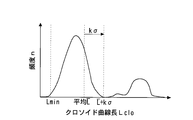
- FIG. 7 shows an example of the distribution of the length Lclo of the accumulated curve relaxation portion 12.
- Lclo takes a value equal to or greater than Lmin due to the structure age, so the left end of the distribution curve is Lmin.
- the present embodiment based on the past data detected and accumulated by the autonomous sensor while driving the curve relaxation unit 12, or based on the future data detected and accumulated by the GPS of the car navigation system. Then, the distribution of the length Lclo of the curve relaxation unit 12 is obtained, and a value larger than the average value of the distribution by a predetermined amount is set as the error threshold LE. Therefore, it is possible to obtain a misrepresentation threshold LE that is more realistic based on the road on which the vehicle 1 has actually passed or data on which the vehicle 1 will actually pass.
- the use of the past data detected and accumulated by the autonomous sensor while traveling in the curve relaxation unit 12 and the future data detected and accumulated by the GPS of the car navigation system can be used, for example, by changing the route type. When the detected past data is no longer valid, it may be switched to future data detected by GPS.
- FIG. 8 the distribution of the relationship between the length Lclo of the large number of curve relaxation parts 12 acquired in the present embodiment and the maximum lateral G generated at that time is shown.
- the horizontal axis is the length Lclo of the curve relaxation portion 12.
- the vertical axis represents the maximum lateral G actually measured when the vehicle passes through each curve relaxation portion 12.
- the curves belonging to the lower left curve group C1 are normal curves, and it is considered that the driver does not feel much danger when passing through these curves.
- FIG. 9 is a graph showing temporal changes in vehicle speed Vs (t), lateral acceleration G, curvature radius R, curvature (1 / R), and steering angle when an actual driver passes a curve. From the change in the radius of curvature R and the curvature (1 / R) of this graph, it can be seen that the time required for the vehicle 1 to pass through the curve relaxation portion 12 is 4.8 sec. Moreover, it turns out that the length Lclo of the curve relaxation part 12 is 61 m from the vehicle speed in that case being 46 km / h.
- the error threshold LE is 60 m. According to the method of the present embodiment, it is possible to determine the misunderstanding threshold LE in consideration of the individual characteristics of the driver, and it is possible to more reliably suppress the occurrence of danger during curve driving.
- the driver finally determines the distance that the curve relaxation unit 12 expects to end, but in this embodiment, the collected data is a temporal change of each parameter. Therefore, in such a case, the misrecognition time threshold value TE may be obtained from the time that the driver assumes that the curve relaxation unit 12 is finished. Specifically, since the time that the driver thinks that the curve relaxation unit 12 is finished was 3.1 sec, for example, 4.65 sec obtained by multiplying this by 1.5 is set as the erroneous time threshold TE. An alarm may be issued when the passing time of the curve relieving unit 12 becomes equal to or greater than the erroneous time threshold TE. Of course, other values may be adopted as Gain.
- FIG. 10 is a graph showing temporal changes in the vehicle speed Vs (t), lateral acceleration G, curvature radius R, and curvature (1 / R) when an actual driver passes the curve.
- this curve is data when the vehicle 1 passes through a curve corresponding to the curve C3 in FIG.
- the present embodiment it is possible to set the misunderstanding threshold LE or the misunderstanding time threshold TE optimum for the driver in consideration of the habit and characteristics of each driver. , More detailed driving assistance can be realized.
- the white line recognition camera 6, the yaw rate sensor 4, and the wheel speed sensor 5 are used as the autonomous sensors.
- the sensor can detect the shape information of the curve relaxation unit 12
- other sensors are used. May be used.
- the curve relaxation unit 12 is defined by a function of a clothoid curve, but the present invention is also applicable to roads where the curve relaxation unit is defined by another function. Is possible.
- a quadratic curve can be cited.
- the acquisition and calculation of the data related to the shape of the curve relaxing unit 12, the determination of the error threshold LE, the error threshold TE, and the driving support execution determination are performed by the ECU 3 mounted on the vehicle 1.
- the present invention is not limited to such a configuration.
- a configuration may be adopted in which each vehicle 1 and the information center can be wirelessly communicated, the above processing is performed in the information center, and a driving support command is transmitted from the information center to each vehicle 1.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- General Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Regulating Braking Force (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
Description
前記曲率変動部を移動体が移動する際に、運転者に運転支援を行なう運転支援手段と、
前記曲率変動情報取得手段によって取得された、前記曲率変動部の形状についての情報に基づいて、前記運転支援手段が運転支援を行なうタイミングを決定する運転支援制御手段と、
を備えることを特徴とする。
そうすれば、曲率変動部の長さが運転者が有している感覚と比較して長く、運転者が曲率変動部の途中で、曲率変動部が終了したと判断することで生じる危険を抑制することができる。
図1は、本実施例に係る車両用運転支援システムの概略構成を示すブロック図である。本システムには、内燃機関を制御する電子制御コンピュータであるECU3が備えられている。ECU3は図示しないROM、RAM、CPU、入力ポート、出力ポート等を備え、ヨーレイトセンサ4、車輪速センサ5、白線認識カメラ6及び、標識認識カメラ7が電気的に接続されている。
L×R=A2・・・・・(1)
ここで、A2は、クロソイド曲線の形状を定める定数である。以下、道路形状についての情報取得の手順の例について説明する。
Lp=∫Vs(t)dt・・・・(2)
Lp×Rp=A2・・・・・・(3)
Lclo=A2/Rreal・・・・(4)
そして、最終的には、道路10のカーブ形状が以下のように特定される。
R(L)=A2/L (0≦L≦Lclo)・・・・・(5)
R(L)=Rreal (L≧Lclo)・・・・・・・(6)
(Vs(t))2≧Rreal×αd・・・・(7)
ここでRrealは真円カーブ部13の曲率半径である。また、αdは車両1の運転に危険が発生し始める危険横加速度であり、予め実験などにより定められる。この危険横加速度αdの値は、例えば0.4G程度でもよい。S202において否定判定された場合には、この時点で警報の必要性はないと判断されるので本ルーチンを一旦終了する。一方、肯定判定された場合は、S203に進む。
本実施例では、実施例1で説明した見誤り閾値LEの決定方法について説明する。図5には、本実施例における見誤り閾値決定ルーチンのフローチャートについて示す。本ルーチンが実行されると、S301において車両1が走行中の道路の設計速度が求められる。これは、道路の設計上想定されている走行速度であり、道路の場所や使用状況を考慮の上定められる場合もある。また、この設計速度は、本ルーチンの実質的な実行が期待されている、市街地以外の道路では、略制限速度に一致すると考えてよい。また、この設計速度は、標識認識カメラ7で道路標識の画像情報を取り込むことで取得してもよいし、カーナビゲーションシステムのGPS情報から道路幅を求め、求められた道路幅から設計速度を逆算する方法で取得してもよい。S301の処理が終了するとS302に進む。
次に、見誤り閾値LEを決める他の方法について説明する。この方法は、実際に車両1が走行した道路のカーブ緩和部12の長さLcloのデータを蓄積し、蓄積されたデータから見誤り閾値LEを決める方法である。この場合に用いる見誤り閾値決定ルーチン2についてのフローチャートを図6に示す。本実施例が実行されると、S401において、ヨーレイトセンサ4及び車輪速センサ5等の自律センサによって、図3の道路形状推定ルーチンに示した要領でLp及びRpの値を求める。また、S402においては、カーナビゲーションシステムのGPSデータより、Lp及びRpの値を求める。
次に、見誤り閾値LEを求める方法のさらに他の例について説明する。本実施例における方法は、実際の運転者が、カーブにおいて危険を感じた現場における各パラメータのデータを用いて見誤り閾値LEを求める方法である。図9は、実在の運転者がカーブを通過した際の、車速Vs(t)、横加速度G、曲率半径R、曲率(1/R)、舵角の時間的変化を示したグラフである。このグラフの曲率半径R及び曲率(1/R)の変化より、車両1がカーブ緩和部12を通過するのに要した時間は4.8secであることが分かる。また、その際の車速が46km/hであることより、カーブ緩和部12の長さLcloは61mであることが分かる。
3・・・ECU
4・・・ヨーレイトセンサ
5・・・車輪速センサ
6・・・白線認識カメラ
7・・・標識認識カメラ
10・・・カーブ
10a・・・白線
11・・・直線部
12・・・カーブ緩和部
13・・・真円カーブ部
15・・・道路標識
Claims (10)
- 曲率半径が所定の関数に従って変化する曲率変動部を有する道路における、前記曲率変動部の形状についての情報を取得する、カーブ情報取得手段と、
前記曲率変動部を移動体が移動する際に、運転者に運転支援を行なう運転支援手段と、
前記カーブ情報取得手段によって取得された、前記曲率変動部の形状についての情報に基づいて、前記運転支援手段が運転支援を行なうタイミングを決定する運転支援制御手段と、
を備えることを特徴とする運転支援システム。 - 前記運転支援制御手段は、前記曲率変動部の長さに基づいて、前記運転支援手段が運転支援を行なうタイミングを決定することを特徴とする請求項1に記載の運転支援システム。
- 前記運転支援制御手段は、前記曲率変動部の長さが、所定の見誤り閾値以上である場合に、前記運転支援手段が運転支援を行なう決定をすることを特徴とする請求項2に記載の運転支援システム。
- 前記見誤り閾値は、前記移動体の走行路線の構造令による最小緩和長及び、前記移動体の走行路線における実際の曲率変動部の長さの分布及び、前記移動体の運転者が過去に曲率変動部が終了したと見誤った曲率変動部の長さの少なくともいずれか一に基づいて定められることを特徴とする請求項3に記載の運転支援システム。
- 前記運転支援制御手段は、前記曲率変動部の長さ及び前記移動体の速度に基づいて、前記運転支援手段が運転支援を行なうタイミングを決定することを特徴とする請求項1から4のいずれか一項に記載の運転支援システム。
- 前記運転支援は、運転者に発報する警報であることを特徴とする請求項1から5のいずれか一項に記載の運転支援システム。
- 前記運転支援は、前記移動体の速度の自動減速制御または、レーンキープ制御のいずれかであることを特徴とする請求項1から5のいずれか一項に記載の運転支援システム。
- 前記運転支援制御手段は、前記曲率変動部の形状に応じ前記移動体が前記曲率変動部を移動する時間に基づいて、前記運転支援手段が運転支援を行なうタイミングを決定することを特徴とする請求項1に記載の運転支援システム。
- 前記運転支援制御手段は、前記移動体が前記曲率変動部を移動する時間が、所定の見誤り時間閾値以上である場合に、前記運転支援手段が運転支援を行なう決定をすることを特徴とする請求項8に記載の運転支援システム。
- 前記見誤り時間閾値は、前記移動体の運転者が過去に曲率変動部が終了したと見誤った時間に基づいて定められることを特徴とする請求項9に記載の運転支援システム。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2011/058948 WO2012137355A1 (ja) | 2011-04-08 | 2011-04-08 | 運転支援システム |
| JP2013508715A JP5794298B2 (ja) | 2011-04-08 | 2011-04-08 | 運転支援システム |
| BR112013025832A BR112013025832A2 (pt) | 2011-04-08 | 2011-04-08 | sistema de apoio de condução |
| US14/009,884 US8762021B2 (en) | 2011-04-08 | 2011-04-08 | Driving support system |
| CN201180069751.3A CN103459225B (zh) | 2011-04-08 | 2011-04-08 | 驾驶支援系统 |
| EP11863219.9A EP2695786A4 (en) | 2011-04-08 | 2011-04-08 | DRIVER ASSISTANCE SYSTEM |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2011/058948 WO2012137355A1 (ja) | 2011-04-08 | 2011-04-08 | 運転支援システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012137355A1 true WO2012137355A1 (ja) | 2012-10-11 |
Family
ID=46968788
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/058948 WO2012137355A1 (ja) | 2011-04-08 | 2011-04-08 | 運転支援システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8762021B2 (ja) |
| EP (1) | EP2695786A4 (ja) |
| JP (1) | JP5794298B2 (ja) |
| CN (1) | CN103459225B (ja) |
| BR (1) | BR112013025832A2 (ja) |
| WO (1) | WO2012137355A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021504245A (ja) * | 2018-07-28 | 2021-02-15 | 上▲海▼商▲湯▼智能科技有限公司Shanghai Sensetime Intelligent Technology Co., Ltd. | インテリジェントドライブ制御方法及び装置、車両、電子機器、媒体並びに製品 |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3217321B1 (en) * | 2013-07-31 | 2019-08-28 | Honda Motor Co., Ltd. | Sign information output apparatus |
| EP3092599B1 (en) | 2013-12-04 | 2019-03-06 | Mobileye Vision Technologies Ltd. | Systems and methods for mimicking a leading vehicle |
| JP6321373B2 (ja) * | 2013-12-25 | 2018-05-09 | 株式会社デンソー | 進路推定装置,及びプログラム |
| EP2960129A1 (en) * | 2014-06-26 | 2015-12-30 | Volvo Car Corporation | Confidence level determination for estimated road geometries |
| JP6285321B2 (ja) * | 2014-08-25 | 2018-02-28 | 株式会社Soken | 道路形状認識装置 |
| US9321461B1 (en) | 2014-08-29 | 2016-04-26 | Google Inc. | Change detection using curve alignment |
| JP6396742B2 (ja) * | 2014-09-30 | 2018-09-26 | 本田技研工業株式会社 | 車両用運転操作誘導制御システム |
| JP6222475B2 (ja) * | 2014-11-10 | 2017-11-01 | マツダ株式会社 | 車両加減速制御装置 |
| US10173695B2 (en) | 2014-11-24 | 2019-01-08 | Here Global B.V. | Method and apparatus for providing notifications based on ranking of road links |
| KR101655609B1 (ko) * | 2014-12-11 | 2016-09-07 | 현대자동차주식회사 | 하이브리드 자동차의 배터리 충전 상태 제어 장치 및 방법 |
| JP6190830B2 (ja) * | 2015-02-10 | 2017-08-30 | 本田技研工業株式会社 | 走行支援システム及び走行支援方法 |
| JP2016159683A (ja) * | 2015-02-27 | 2016-09-05 | 富士通テン株式会社 | 車両制御装置、車両制御システム、および、車両制御方法 |
| DE102016207125A1 (de) * | 2016-04-27 | 2017-11-02 | Robert Bosch Gmbh | Steuern eines Kraftfahrzeugs |
| JP2019066963A (ja) * | 2017-09-28 | 2019-04-25 | 株式会社デンソー | 運転支援装置および運転支援方法 |
| JP7081117B2 (ja) * | 2017-11-06 | 2022-06-07 | いすゞ自動車株式会社 | 操舵制御装置及び操舵制御方法 |
| JP6915502B2 (ja) * | 2017-11-09 | 2021-08-04 | トヨタ自動車株式会社 | ドライバ状態検出装置 |
| JP2019159500A (ja) * | 2018-03-08 | 2019-09-19 | トヨタ自動車株式会社 | 車両制御装置 |
| JP6973302B2 (ja) * | 2018-06-06 | 2021-11-24 | トヨタ自動車株式会社 | 物標認識装置 |
| CN111216740A (zh) * | 2018-11-08 | 2020-06-02 | 株式会社万都 | 驾驶员辅助设备及其控制方法以及驾驶员辅助系统 |
| JP7341941B2 (ja) * | 2020-04-14 | 2023-09-11 | 日立Astemo株式会社 | 車両運動制御装置及び車両運転制御方法 |
| JP2023017648A (ja) * | 2021-07-26 | 2023-02-07 | トヨタ自動車株式会社 | 車両用表示装置、車両用表示システム、車両用表示方法及びプログラム |
| FR3127737B1 (fr) * | 2021-10-06 | 2023-12-15 | Psa Automobiles Sa | Systèmes d’alerte préventive d’approche d’un virage dangereux |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11160078A (ja) * | 1997-12-02 | 1999-06-18 | Toyota Motor Corp | 走行路形状推定装置 |
| JP2004272426A (ja) | 2003-03-06 | 2004-09-30 | Nissan Motor Co Ltd | 道路形状認識装置 |
| JP2005202579A (ja) * | 2004-01-14 | 2005-07-28 | Toyota Motor Corp | 車両速度制御装置 |
| JP2006031553A (ja) * | 2004-07-20 | 2006-02-02 | Aisin Seiki Co Ltd | 車両のレーン走行支援装置 |
| JP2007066179A (ja) * | 2005-09-01 | 2007-03-15 | Toyota Motor Corp | 車両用運転支援装置 |
| JP2007106170A (ja) | 2005-10-11 | 2007-04-26 | Fujifilm Corp | 運転支援システム |
| JP2008290469A (ja) | 2007-05-22 | 2008-12-04 | Hitachi Ltd | 経路曲率に応じた車両の速度制御装置 |
| WO2009101769A1 (ja) * | 2008-02-15 | 2009-08-20 | Aisin Aw Co., Ltd. | 運転支援装置、運転支援方法および運転支援プログラム |
| JP2010076584A (ja) * | 2008-09-25 | 2010-04-08 | Hitachi Automotive Systems Ltd | 加減速制御装置 |
| JP2010202042A (ja) * | 2009-03-03 | 2010-09-16 | Toyota Motor Corp | 走行支援装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0841648B1 (en) * | 1992-09-30 | 2004-06-02 | Hitachi, Ltd. | Vehicle driving support system and vehicle therewith |
| KR100250323B1 (ko) * | 1997-10-10 | 2000-04-01 | 정몽규 | 무인 자동차의 화상 처리 장치 및 방법 |
| JP3753893B2 (ja) * | 1999-06-29 | 2006-03-08 | 本田技研工業株式会社 | 走行車両の制御装置 |
| US6411867B1 (en) * | 1999-10-27 | 2002-06-25 | Fujitsu Ten Limited | Vehicle driving support system, and steering angle detection device |
| JP3482166B2 (ja) * | 1999-12-08 | 2003-12-22 | 本田技研工業株式会社 | 車両用運転状況監視装置 |
| JP3979400B2 (ja) * | 2004-04-23 | 2007-09-19 | 日産自動車株式会社 | 前方道路対応制御装置 |
| US20050246091A1 (en) * | 2004-04-28 | 2005-11-03 | Nissan Motor Co., Ltd. | Curvature radius estimating apparatus and method |
| JP4311374B2 (ja) * | 2005-05-25 | 2009-08-12 | トヨタ自動車株式会社 | 推奨車速設定装置及び車両制御装置 |
| JP2007331580A (ja) | 2006-06-15 | 2007-12-27 | Xanavi Informatics Corp | 車両速度制御システム |
| JP4915739B2 (ja) * | 2007-05-31 | 2012-04-11 | アイシン・エィ・ダブリュ株式会社 | 運転支援装置 |
| KR100939761B1 (ko) * | 2008-10-02 | 2010-01-29 | 삼성전기주식회사 | 차량 장착용 카메라 유닛, 차량 외부 디스플레이 방법 및 드라이빙 코리더 마커 생성 시스템 |
| JP5233816B2 (ja) * | 2009-04-22 | 2013-07-10 | アイシン・エィ・ダブリュ株式会社 | 運転支援装置、運転支援方法及び運転支援プログラム |
| JP5286214B2 (ja) * | 2009-09-30 | 2013-09-11 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
-
2011
- 2011-04-08 US US14/009,884 patent/US8762021B2/en not_active Expired - Fee Related
- 2011-04-08 JP JP2013508715A patent/JP5794298B2/ja not_active Expired - Fee Related
- 2011-04-08 WO PCT/JP2011/058948 patent/WO2012137355A1/ja active Application Filing
- 2011-04-08 CN CN201180069751.3A patent/CN103459225B/zh not_active Expired - Fee Related
- 2011-04-08 EP EP11863219.9A patent/EP2695786A4/en not_active Withdrawn
- 2011-04-08 BR BR112013025832A patent/BR112013025832A2/pt not_active IP Right Cessation
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11160078A (ja) * | 1997-12-02 | 1999-06-18 | Toyota Motor Corp | 走行路形状推定装置 |
| JP2004272426A (ja) | 2003-03-06 | 2004-09-30 | Nissan Motor Co Ltd | 道路形状認識装置 |
| JP2005202579A (ja) * | 2004-01-14 | 2005-07-28 | Toyota Motor Corp | 車両速度制御装置 |
| JP2006031553A (ja) * | 2004-07-20 | 2006-02-02 | Aisin Seiki Co Ltd | 車両のレーン走行支援装置 |
| JP2007066179A (ja) * | 2005-09-01 | 2007-03-15 | Toyota Motor Corp | 車両用運転支援装置 |
| JP2007106170A (ja) | 2005-10-11 | 2007-04-26 | Fujifilm Corp | 運転支援システム |
| JP2008290469A (ja) | 2007-05-22 | 2008-12-04 | Hitachi Ltd | 経路曲率に応じた車両の速度制御装置 |
| WO2009101769A1 (ja) * | 2008-02-15 | 2009-08-20 | Aisin Aw Co., Ltd. | 運転支援装置、運転支援方法および運転支援プログラム |
| JP2010076584A (ja) * | 2008-09-25 | 2010-04-08 | Hitachi Automotive Systems Ltd | 加減速制御装置 |
| JP2010202042A (ja) * | 2009-03-03 | 2010-09-16 | Toyota Motor Corp | 走行支援装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2695786A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021504245A (ja) * | 2018-07-28 | 2021-02-15 | 上▲海▼商▲湯▼智能科技有限公司Shanghai Sensetime Intelligent Technology Co., Ltd. | インテリジェントドライブ制御方法及び装置、車両、電子機器、媒体並びに製品 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2012137355A1 (ja) | 2014-07-28 |
| US8762021B2 (en) | 2014-06-24 |
| EP2695786A4 (en) | 2016-08-24 |
| CN103459225A (zh) | 2013-12-18 |
| BR112013025832A2 (pt) | 2016-12-20 |
| EP2695786A1 (en) | 2014-02-12 |
| US20140032072A1 (en) | 2014-01-30 |
| JP5794298B2 (ja) | 2015-10-14 |
| CN103459225B (zh) | 2016-01-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5794298B2 (ja) | 運転支援システム | |
| EP3075618B1 (en) | Vehicle control apparatus | |
| EP3591638B1 (en) | Drive assistance method and drive assistance device | |
| US11400929B2 (en) | Method and apparatus for vision based lateral acceleration prediction | |
| US10583835B2 (en) | Method for automatically adapting acceleration in a motor vehicle | |
| CN107615011B (zh) | 停车位置设定装置及方法 | |
| CN107107751B (zh) | 目标车速生成装置及行驶控制装置 | |
| CN111688694B (zh) | 车辆车道改变控制设备及方法 | |
| JP2017151782A (ja) | 自動運転装置 | |
| JP2005524135A (ja) | 車両における横ガイド支援方法及びその装置 | |
| US8775030B2 (en) | Vehicle seat belt system | |
| JP4277907B2 (ja) | 自動車の走行制御装置 | |
| JP2012144160A (ja) | 運転支援装置 | |
| US8897960B2 (en) | Driving assistance control apparatus | |
| JP7066463B2 (ja) | 走行支援システムおよび車両の制御方法 | |
| US11130490B2 (en) | Vehicle control device | |
| JP2009298192A (ja) | 車両の運転支援装置 | |
| US11130488B2 (en) | Vehicle control device and vehicle control method | |
| JP2008059366A (ja) | 操舵角決定装置、自動車及び操舵角決定方法 | |
| JP2012153296A (ja) | 走行制御装置 | |
| KR101360440B1 (ko) | 차량용 차선 유지 제어방법 및 장치 | |
| JP2006335174A (ja) | 車両用走行制御装置 | |
| JP2006036159A (ja) | 車両の走行制御装置 | |
| CN117120317B (zh) | 车辆的驾驶控制方法以及驾驶控制装置 | |
| JPWO2013046293A1 (ja) | 車両の運転支援システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11863219 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2013508715 Country of ref document: JP Kind code of ref document: A |
|
| REEP | Request for entry into the european phase |
Ref document number: 2011863219 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011863219 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14009884 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REG | Reference to national code |
Ref country code: BR Ref legal event code: B01A Ref document number: 112013025832 Country of ref document: BR |
|
| ENP | Entry into the national phase |
Ref document number: 112013025832 Country of ref document: BR Kind code of ref document: A2 Effective date: 20131007 |