WO2012066995A1 - センサ付車輪用軸受 - Google Patents
センサ付車輪用軸受 Download PDFInfo
- Publication number
- WO2012066995A1 WO2012066995A1 PCT/JP2011/075805 JP2011075805W WO2012066995A1 WO 2012066995 A1 WO2012066995 A1 WO 2012066995A1 JP 2011075805 W JP2011075805 W JP 2011075805W WO 2012066995 A1 WO2012066995 A1 WO 2012066995A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sensor
- load
- value
- wheel bearing
- wheel
- Prior art date
Links
- 238000004364 calculation method Methods 0.000 claims abstract description 89
- 238000001514 detection method Methods 0.000 claims abstract description 29
- 238000005096 rolling process Methods 0.000 claims description 69
- 238000011156 evaluation Methods 0.000 claims description 59
- 238000012545 processing Methods 0.000 claims description 24
- 238000012937 correction Methods 0.000 claims description 17
- 230000008859 change Effects 0.000 claims description 15
- 239000002131 composite material Substances 0.000 claims description 14
- 230000007704 transition Effects 0.000 claims description 5
- 238000012886 linear function Methods 0.000 claims description 3
- 230000002194 synthesizing effect Effects 0.000 claims description 2
- 238000000034 method Methods 0.000 description 28
- 239000000203 mixture Substances 0.000 description 21
- 230000008569 process Effects 0.000 description 20
- 230000015572 biosynthetic process Effects 0.000 description 13
- 238000003786 synthesis reaction Methods 0.000 description 12
- 238000010586 diagram Methods 0.000 description 10
- 230000000694 effects Effects 0.000 description 10
- 238000007781 pre-processing Methods 0.000 description 9
- 238000005070 sampling Methods 0.000 description 9
- QZGJNFBMYYEFGM-UHFFFAOYSA-N 1-ethyl-n-(phenylmethyl)-4-(tetrahydro-2h-pyran-4-ylamino)-1h-pyrazolo[3,4-b]pyridine-5-carboxamide Chemical compound C=1C=CC=CC=1CNC(=O)C1=CN=C2N(CC)N=CC2=C1NC1CCOCC1 QZGJNFBMYYEFGM-UHFFFAOYSA-N 0.000 description 8
- 238000006243 chemical reaction Methods 0.000 description 7
- 230000014509 gene expression Effects 0.000 description 7
- 125000006850 spacer group Chemical group 0.000 description 6
- 230000004044 response Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 230000035945 sensitivity Effects 0.000 description 4
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000006866 deterioration Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images

















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/52—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions
- F16C19/522—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions related to load on the bearing, e.g. bearings with load sensors or means to protect the bearing against overload
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/02—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows
- F16C19/14—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load
- F16C19/18—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load with two or more rows of balls
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/02—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows
- F16C19/14—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load
- F16C19/18—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load with two or more rows of balls
- F16C19/181—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load with two or more rows of balls with angular contact
- F16C19/183—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load with two or more rows of balls with angular contact with two rows at opposite angles
- F16C19/184—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load with two or more rows of balls with angular contact with two rows at opposite angles in O-arrangement
- F16C19/186—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for both radial and axial load with two or more rows of balls with angular contact with two rows at opposite angles in O-arrangement with three raceways provided integrally on parts other than race rings, e.g. third generation hubs
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0009—Force sensors associated with a bearing
- G01L5/0019—Force sensors associated with a bearing by using strain gages, piezoelectric, piezo-resistive or other ohmic-resistance based sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M13/00—Testing of machine parts
- G01M13/04—Bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2233/00—Monitoring condition, e.g. temperature, load, vibration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2240/00—Specified values or numerical ranges of parameters; Relations between them
- F16C2240/12—Force, load, stress, pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2326/00—Articles relating to transporting
- F16C2326/01—Parts of vehicles in general
- F16C2326/02—Wheel hubs or castors
Definitions
- This invention relates to a wheel bearing with a sensor incorporating a load sensor for detecting a load applied to a bearing portion of the wheel.
- the wheel bearing in the sensor-equipped wheel bearing of the same document includes an outer member in which a double row rolling surface is formed on the inner periphery, and an inner member in which the rolling surface opposite to the rolling surface is formed on the outer periphery.
- a member and a double row rolling element interposed between the opposing rolling surfaces of both members are provided, and the wheel is rotatably supported with respect to the vehicle body.
- a sensor unit comprising two sensor units arranged on the outer diameter surface of the fixed side member of the outer member and the inner member at a position that forms a phase difference of 180 degrees in the circumferential direction of the fixed side member. At least one pair is provided.
- Each sensor unit has a strain generating member having two or more contact fixing portions fixed in contact with the outer diameter surface of the fixed side member, and detects the strain of the strain generating member attached to the strain generating member. It shall have a sensor.
- the radial load estimating means estimates the radial load acting in the radial direction of the wheel bearing. Further, based on the sum of the sensor output signals of the two sensor units in the sensor unit pair, the axial load acting means estimates the axial load acting in the axial direction of the wheel bearing. Then, the two sensor units of at least one pair of sensor units are arranged on the upper surface portion and the lower surface portion of the outer diameter surface of the fixed side member that is in the vertical position with respect to the tire ground contact surface. Based on the output signal amplitude of the sensor of the sensor unit pair, the axial load direction determining means determines the direction of the axial load. An outline of the load estimation process in this case is shown in a block diagram in FIG.
- the axial load is determined based on the difference between the amplitude values (vibration components accompanying the revolution motion of the rolling elements) in the sensor output signals of the two sensor units arranged above and below, and depending on whether the axial load is positive or negative, Since the load is calculated using load estimation parameters suitable for each, the load can be estimated with high sensitivity.
- Patent Document 3 a new load estimation means for the sensor-equipped wheel bearing having a configuration shown in a block diagram in FIG. 22.
- the load estimating means is configured to calculate / estimate the load acting on the wheel bearing from only the average value of the sensor output signal and the average value and amplitude value of the sensor output signal.
- second load estimation means for estimation and selection output means for switching and outputting the estimated load value of either of these load estimation means according to the wheel rotational speed.
- a formula using only the average value A of the sensor output signal as a variable and a formula using the average value A and the amplitude value B of the sensor output signal as variables are prepared as load estimation calculation formulas.
- rotation speed information is used to determine the rotation speed.
- an optimal load is selected from a plurality of load estimation parameters according to the state of the detected sensor output signal and the estimated load state, and the estimated load.
- the amplitude value of the sensor output signal is obtained by calculation, calculation processing using a certain number of sensor output signals within a certain period of time or a certain number of samplings is required, and a time delay due to signal processing occurs. For example, if the root mean square value (RMS value) of the sensor output signal within a certain time T is calculated and used as the current amplitude value, a time delay of approximately T / 2 occurs.
- RMS value root mean square value
- a load estimation calculation formula that uses only the average value A of the sensor output signal as a variable and a load estimation calculation formula that uses the average value A and the amplitude value B are expressed as a traveling speed (When the switching is used depending on the wheel rotation speed), the delay time of the estimated load output also changes due to the switching, so that it is observed as a detection error.
- the estimated load output may change discontinuously.
- the above-described discontinuous change in the estimated load output and a large detection error are not preferable.
- a rotation sensor is installed to detect the rotation speed of the wheel, or the rotation speed information of the wheel is obtained separately from the vehicle side, so that the calculation result by the two calculation formulas is obtained. Although it is possible to switch continuously according to the rotation speed, it cannot be handled in a situation where rotation speed information is not available.
- an evaluation value according to the rotation speed can be obtained even in a situation where the rotation sensor signal cannot be used or in a situation where the rotation speed information cannot be acquired continuously and stably.
- an evaluation value according to the rotation speed can be obtained even in a situation where the rotation sensor signal cannot be used or in a situation where the rotation speed information cannot be acquired continuously and stably.
- it is possible to determine whether or not the engine is in a low-speed rotation state with this evaluation value it is not an evaluation value that is exactly proportional to the speed, so that it is difficult to apply to the process of continuously switching according to the speed.
- the vibration frequency of the sensor output signal generated by the revolution motion of the bearing rolling element is proportional to the traveling speed of the vehicle. Therefore, the frequency may reach a frequency close to the AD conversion sampling rate during high-speed driving. In this case, an accurate amplitude value B cannot be obtained due to aliasing appearing in the sampling data.
- an LPF low pass filter
- the amplitude value B detected during high-speed traveling is detected to be small due to the influence of the LPF, and the load estimation error increases. Such a discontinuous change or a large detection error is not preferable for a control system in an automobile or the like that executes various operations based on the detected estimated load value.
- the object of the present invention is to calculate a continuous estimated load value according to various input load states while correcting the nonlinear characteristic of the sensor to reduce the load estimation error, and to calculate the estimated load value with the smallest possible detection time delay. It is to provide a wheel bearing with a sensor that can output, and another object is to perform load estimation calculation processing without using a rotation sensor signal or wheel rotation speed information from a vehicle, and to perform accurate estimation. It is to provide a wheel bearing with a sensor capable of obtaining a load value.
- the sensor-equipped wheel bearing according to the first configuration of the present invention has an outer member 1 in which double-row rolling surfaces are formed on the inner periphery, and a rolling surface that faces the rolling surfaces on the outer periphery.
- a wheel bearing comprising an inner member 2 and a double row rolling element 5 interposed between opposing rolling surfaces of both members, and a wheel bearing for rotatably supporting a wheel relative to a vehicle body, wherein the outer member
- the strain generating member 21 having three or more contact fixing portions 21a fixed to the fixed side member 1 and the inner member 2 in contact with the fixed side member, and attached to the strain generating member 21
- Load detecting sensor units 20A and 20B including two or more sensors 22A and 22B for detecting the strain of the strain generating member 21 are provided.
- First load estimating means 31 for calculating and estimating a load acting on the wheel bearing using the average value A of the output signals of the sensors 22A and 22B, and the average value A and the amplitude of the output signals of the sensors 22A and 22B
- Second load estimation means 32 for calculating / estimating the load acting on the wheel bearing using the value B, and the calculation results output by these load estimation means 31, 32 at a ratio r corresponding to the wheel rotational speed.
- Estimated load output means 33 for combining and outputting an estimated load value is provided.
- the load when a load acts between the tire of the wheel and the road surface, the load is also applied to the fixed member (for example, the outer member 1) of the wheel bearing, and deformation occurs.
- the fixed member for example, the outer member 1
- the strain of the outer member 1 is expanded to the strain generating member 21.
- the distortion is easily detected, and the distortion is detected with high sensitivity by the sensors 22A and 22B, and the hysteresis generated in the output signal is also reduced.
- the first load estimating means 31 for calculating and estimating the load acting on the wheel bearing using the average value A of the output signals of the strain sensors 22A and 22B of the sensor unit 20A (20B), and the amplitude of the sensor output signal Second load estimating means 32 for calculating / estimating the load acting on the wheel bearing using the value B and the average value A is provided, and the calculation results output by both the load estimating means 31, 32 are used to rotate the wheel. Since the estimated load output means 33 that outputs the estimated load value by combining with the ratio r according to the speed is provided, the following effects can be obtained.
- the detection time delay due to the load estimation calculation process can be minimized, and control using the obtained load information becomes easy.
- the delay time of the estimated load output also changes abruptly, and as a result, a detection error is observed.
- the two calculation results described above are combined at the continuously changing combination ratio r, there is no discontinuous change in the obtained estimated load value, and the use of the estimated load value for various vehicle controls is facilitated.
- the first load value LA based only on the average value A can be output in a stationary state or an extremely low speed state, a load state that acts between the tire and the road surface even when the vehicle is stationary Can be detected.
- the vibration frequency of the sensor output signal may reach a value close to the AD conversion sampling rate during high-speed running, but the above two calculation results are synthesized using the synthesis ratio r.
- Even when an error of B occurs by increasing the ratio of the first load value LA calculated using only the average value A, the influence of the error of the amplitude value B can be reduced, and the load detection accuracy is increased. be able to.
- the sensors 22A and 22B are arranged between the adjacent first and second contact fixing portions 21a and between the adjacent second and third contact fixing portions 21a.
- Each of the contact fixing portions 21a or adjacent sensors 22A and 22B attached in the circumferential direction of the fixing member is set to ⁇ 1/2 + n (n: integer) ⁇ times the arrangement pitch of the rolling elements.
- the first and second load estimating means 31 and 32 may use the sum of the output signals of the two sensors 22A and 22B as the average value A.
- the output signals of the two sensors 22A and 22B have a phase difference of approximately 180 degrees, and the average value A is a value obtained by canceling the fluctuation component due to the rolling element passage.
- the amplitude value B is a value that sufficiently offsets the influence of temperature and the influence of slippage between the knuckle and flange surfaces.
- the average value A of the output signals of the two sensors 22A and 22B becomes a value obtained by canceling the fluctuation component due to passing through the rolling elements, and the amplitude value B is more influenced by temperature and the effect of slippage between the knuckle and flange surfaces. It will be accurate and surely excluded.
- composition ratio r used in the estimated load output means 33 is set so as to increase as the wheel rotation speed changes from the normal speed state to the high speed state.
- the composite ratio r used in the estimated load output means 33 is mapped in correspondence with the wheel rotation speed, and may be changeable by a parameter from the outside.
- mapped means that the composition ratio r is determined corresponding to the wheel rotation speed.
- From the outside means other than the estimated load output means 33, the means for determining the mapped information, and the processing means preceding the estimated load output means 33.
- the estimated load output means 33 may detect the wheel rotation speed by directly inputting the output signal of the wheel rotation speed detection sensor installed in the wheel bearing.
- the estimated load output means 33 may receive wheel rotational speed information from an ECU (electric control unit) on the vehicle body side.
- ECU electric control unit
- the estimated load output means 33 may detect the wheel rotation speed from the frequency of the amplitude component due to the revolution motion of the rolling element 5 included in the output signals of the sensors 22A and 22B.
- three or more sensor units 20A (20B) are provided, and the first and second load estimating means 31, 32 are outputs of the sensors 22A, 22B of the three or more sensor units 20A (20B).
- the radial loads Fx and Fz acting in the radial direction of the wheel bearing and the axial load Fy acting in the axial direction of the wheel bearing may be calculated and estimated from the signal.
- the sensor unit 20A (20B) is circumferentially arranged on the upper surface portion, the lower surface portion, the right surface portion, and the left surface portion of the outer diameter surface of the fixed side member that is in the vertical position and the horizontal position with respect to the tire ground contact surface.
- Four of them may be equally arranged with a phase difference of 90 degrees in the direction.
- the temperature sensor 19 may be attached to the sensor unit 20A (20B), and the temperature correction means 37 for correcting the sensor output signal by the detection signal of the temperature sensor 19 may be provided. If the temperature of the wheel bearing changes due to heat generated by the rotation of the bearing or the surrounding environment, the sensor output signal of the sensor unit 20A (20B) fluctuates due to thermal expansion or the like even if the load does not change. The effect of temperature remains. Therefore, by providing temperature correction means 37 for correcting the average value A of the sensor output signal in accordance with the temperature of the wheel bearing or its surrounding temperature, it is possible to reduce the detected load error due to temperature.
- a first load value LA calculated and estimated by the first load estimation means 31 and a second load calculated and estimated by the second load estimation means 32 are provided separately from the estimated load output means 33.
- the second estimated load output means 35 for individually outputting the load value LB to the outside may be provided separately from the estimated load output means 33.
- the second estimated load output that outputs the first load values LA and LB calculated by the first and second load estimation means 31 and 32 separately.
- the means 35 it is possible to perform a process in which the ECU on the vehicle body synthesizes these calculation results according to the traveling state. In this case, since it is possible to make a determination based on more information regarding the running state of the vehicle, it is easy to output the optimum estimated load value by controlling the above-described combination ratio r.
- rotational speed evaluation means 36 for obtaining an evaluation value V representing the rotational speed of the wheel from the output signals of the sensors 22A and 22B, and the estimated load output means 33A has the evaluation value V predetermined.
- the calculation results are synthesized at a ratio r corresponding to the elapsed time after crossing the threshold value Vth.
- the first load estimating means 31 for calculating and estimating the load acting on the wheel bearing using only the average value A of the output signals of the sensors 22A and 22B of the sensor unit 20A (20B), and Two estimating means 30 comprising second load estimating means 32 for calculating / estimating the load acting on the wheel bearing using the amplitude value B of the output signals of the sensors 22A and 22B and the average value A;
- the rotational speed evaluation means 36 for obtaining the evaluation value V representing the rotational speed of the wheel, and the estimation results 31 and 32 of the estimation means 30 based on the evaluation value V are combined and estimated.
- Estimated load output means 33A for outputting a load value is provided, and this estimated load output means 33A responds to an elapsed time after the evaluation value V crosses a predetermined threshold value Vth. Since the ratio r is to perform the synthesis of the calculation result, effects are obtained as listed below.
- load estimation calculation processing can be performed without using a rotation sensor signal or wheel rotation speed information from the vehicle, there is no need to increase the number of signal wires, and the manufacturing cost of the load sensor can be reduced.
- the degree of freedom when mounted on can be increased. Since the load estimation error is suppressed by switching between the load estimation calculation process in a normal rotation state and the load estimation calculation process at low speed, a more accurate estimated load value can be obtained. Even when the load estimation calculation processing is switched according to the rotation speed, the load signal is not discontinuously changed by the method in which the composition ratio is continuously changed, and the use of the load signal for various vehicle controls becomes easy.
- the signal can be used for vehicle control or the like without depending on the traveling state.
- the output signals of the sensors 22A and 22B within a predetermined time T may be used. .
- the value of the predetermined time T may be changed according to the evaluation value V obtained by the rotational speed evaluation means 36. If the fixed time T is set to be longer when the rotational speed of the wheel is low, and the fixed time T is shortened when the rotational speed is increased, the calculation process using the amplitude value B in the estimating means 30 is slow. It is possible to shorten the response time of the calculation result in a speed region where a faster response is required while suppressing deterioration in accuracy in the region.
- the composition ratio r used in the estimated load output means 33A may be determined by a linear function having an elapsed time after the evaluation value V crosses a predetermined threshold value Vth as a variable. .
- the composite ratio r used in the estimated load output means 33A is determined by a quadratic or higher-order function whose variable is an elapsed time after the evaluation value V crosses a predetermined threshold value Vth. It is also good.
- the change in the composite ratio r used in the estimated load output means 33A is the passage of a preset transition time a out of the elapsed time since the evaluation value V crossed a predetermined threshold th. It is good to complete it.
- the threshold value Vth is crossed again. It is also possible that the subsequent synthesis ratio r changes with the current synthesis ratio r as the initial value.
- the rotational speed evaluation means 36 may select the sum of the amplitude values B of the output signals of the sensors 22A and 22B as the evaluation value V.
- the rotational speed evaluation means 36 may obtain the evaluation value V from the frequency of the amplitude component due to the revolution motion of the rolling elements included in the output signals of the sensors 22A and 22B.
- FIG. 4 is a sectional view taken along line IV-IV in FIG. 3. It is a longitudinal cross-sectional view which shows the other example of installation of a sensor unit. It is explanatory drawing of the influence of a rolling-element position with respect to the output signal of a sensor unit. It is a block diagram of the circuit example of the calculating part which calculates the average value and amplitude value of a sensor output signal. It is a block diagram of the circuit part which estimates and outputs a load from an average value and an amplitude value. It is a graph which shows an example of the relationship between a wheel rotational speed and a synthetic
- (A) is a graph showing the relationship between the amplitude of the sensor output signal at the upper part of the outer member outer diameter surface and the direction of the axial load
- (B) is the amplitude of the sensor output signal at the lower part of the outer diameter surface and the axial direction. It is a graph which shows the relationship with a load. It is a graph which shows the relationship between the magnitude
- This embodiment is a third generation inner ring rotating type and is applied to a wheel bearing for driving wheel support.
- the side closer to the outer side in the vehicle width direction of the vehicle when attached to the vehicle is referred to as the outboard side, and the side closer to the center of the vehicle is referred to as the inboard side.
- the bearing for the sensor-equipped wheel bearing includes an outer member 1 in which double-row rolling surfaces 3 are formed on the inner periphery, and rolling members facing the respective rolling surfaces 3.
- the inner member 2 has a running surface 4 formed on the outer periphery, and the outer member 1 and the double row rolling elements 5 interposed between the rolling surfaces 3 and 4 of the inner member 2.
- This wheel bearing is a double-row angular ball bearing type, and the rolling elements 5 are made of balls and are held by a cage 6 for each row.
- the rolling surfaces 3 and 4 have an arc shape in cross section, and are formed so that the ball contact angle is aligned with the back surface. Both ends of the bearing space between the outer member 1 and the inner member 2 are sealed by a pair of seals 7 and 8, respectively.
- the outer member 1 is a fixed side member, and has a vehicle body mounting flange 1a attached to a knuckle 16 in a suspension device (not shown) of the vehicle body on the outer periphery, and the whole is an integral part.
- the flange 1a is provided with screw holes 14 for attaching a knuckle at a plurality of locations in the circumferential direction, and knuckle bolts (not shown) inserted into the bolt insertion holes 17 of the knuckle 16 from the inboard side are screwed into the screw holes 14.
- the vehicle body mounting flange 1a is attached to the knuckle 16.
- the inner member 2 is a rotating side member, and includes a hub wheel 9 having a hub flange 9a for wheel mounting, and an inner ring 10 fitted to the outer periphery of the end portion on the inboard side of the shaft portion 9b of the hub wheel 9. And become.
- the hub wheel 9 and the inner ring 10 are formed with the rolling surfaces 4 of the respective rows.
- An inner ring fitting surface 12 having a small diameter with a step is provided on the outer periphery of the inboard side end of the hub wheel 9, and the inner ring 10 is fitted to the inner ring fitting surface 12.
- a through hole 11 is provided at the center of the hub wheel 9.
- the hub flange 9a is provided with press-fitting holes 15 for hub bolts (not shown) at a plurality of locations in the circumferential direction.
- a cylindrical pilot portion 13 for guiding a wheel and a braking component (not shown) protrudes toward the outboard side.
- FIG. 2 shows a front view of the outer member 1 of the wheel bearing as viewed from the outboard side. 1 shows a cross-sectional view taken along the arrow II in FIG. As shown in FIG. 2, the vehicle body mounting flange 1 a is a projecting piece 1 aa in which a circumferential portion provided with each screw hole 14 protrudes to the outer diameter side from the other portion.
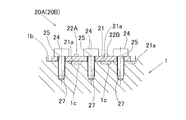
- Two sensor units 20A and 20B are provided on the outer diameter surface of the outer member 1 which is a fixed member.
- these sensor units 20 ⁇ / b> A and 20 ⁇ / b> B are respectively provided on the upper surface portion and the lower surface portion of the outer diameter surface of the outer member 1 that is in the vertical position with respect to the tire ground contact surface.
- strain generating member 21 is made of an elastically deformable metal such as a steel material and is made of a thin plate material of 2 mm or less, and has a planar shape with a strip shape having a uniform width over the entire length, and has notches 21b on both sides.
- the corner of the notch 21b has an arcuate cross section.
- the strain generating member 21 has three or more (three in this case) contact fixing portions 21 a that are fixed to the outer diameter surface of the outer member 1 through spacers 23.
- the three contact fixing portions 21 a are arranged in a line in the longitudinal direction of the strain generating member 21.
- the two strain sensors 22 ⁇ / b> A and 22 ⁇ / b> B are affixed to the strain generating member 21 where the strain increases with respect to the load in each direction. Specifically, it arrange
- one strain sensor 22A is arranged between the contact fixing portion 21a at the left end and the contact fixing portion 21a at the center, and the other between the contact fixing portion 21a at the center and the contact fixing portion 21a at the right end.
- One strain sensor 22B is arranged.
- the notch portions 21 b are formed at two positions corresponding to the placement portions of the strain sensors 22 ⁇ / b> A and 22 ⁇ / b> B on both side portions of the strain generating member 21.
- the strain sensors 22A and 22B detect the strain in the longitudinal direction around the notch 21b of the strain generating member 21.
- the strain generating member 21 is plastically deformed even in a state in which an assumed maximum force is applied as an external force acting on the outer member 1 that is a fixed member or an acting force acting between the tire and the road surface. It is desirable not to do so. This is because, when plastic deformation occurs, the deformation of the outer member 1 is not transmitted to the sensor units 20A and 20B and affects the measurement of strain.
- the three contact fixing portions 21a of the strain generating member 21 are located at the same size in the axial direction of the outer member 1, and the contact fixing portions 21a are separated from each other in the circumferential direction.
- the contact fixing portions 21 a are respectively fixed to the outer diameter surface of the outer member 1 by bolts 24 through spacers 23.
- Each bolt 24 is inserted into a bolt insertion hole 26 of the spacer 23 from a bolt insertion hole 25 penetrating in the radial direction provided in the contact fixing portion 21 a, and a screw hole 27 provided in the outer peripheral portion of the outer member 1. Screwed on.
- each portion having the cutout portion 21b in the strain generating member 21 which is a thin plate shape becomes the outer member 1. It becomes a state away from the outer diameter surface of this, and distortion deformation around the notch 21b becomes easy.
- an axial position where the contact fixing portion 21a is disposed an axial position that is the periphery of the rolling surface 3 of the outboard side row of the outer member 1 is selected here.
- the periphery of the rolling surface 3 of the outboard side row is a range from the intermediate position of the rolling surface 3 of the inboard side row and the outboard side row to the formation portion of the rolling surface 3 of the outboard side row. It is.
- a flat portion 1 b is formed at a location where the spacer 23 is contacted and fixed on the outer diameter surface of the outer member 1.
- a groove 1 c is provided in each of the three intermediate portions where the three contact fixing portions 21 a of the strain generating member 21 are fixed on the outer diameter surface of the outer member 1.
- the spacer 23 may be omitted, and the portions where the notches 21b of the strain generating member 21 are located may be separated from the outer diameter surface of the outer member 1.
- strain sensors 22A and 22B can be used.
- the strain sensors 22A and 22B can be configured with a metal foil strain gauge. In that case, the distortion generating member 21 is usually fixed by adhesion. Further, the strain sensors 22A and 22B can be formed on the strain generating member 21 with a thick film resistor.
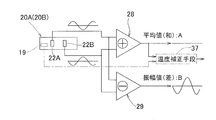
- the two strain sensors 22A and 22B of the sensor unit 20A (20B) are connected to an average value calculator 28 and an amplitude value calculator 29 as shown in FIG.
- the average value calculation unit 28 includes an adder, calculates the sum of the output signals of the two strain sensors 22A and 22B, and extracts the sum as an average value A.
- the amplitude value calculation unit 29 includes a subtractor, calculates the difference between the output signals of the two strain sensors 22A and 22B, and extracts the difference value as the amplitude value B. Note that, as the average value A, in addition to calculating the sum of the sensor output signals, the time average value of the sensor output signals may be taken out.
- the average value calculation unit 28 and the amplitude value calculation unit 29 are connected to the estimation means 30.
- Estimating means 30 determines the force (for example, in the vertical direction) acting on the wheel bearing or between the wheel and the road surface (tire contact surface) from the average value A and the amplitude value B calculated from the sensor output signals of the sensor units 20A and 20B. It is a means for calculating / estimating the load Fz).
- the estimation means 30 includes first load estimation means 31 as an arithmetic processing unit that calculates and estimates the load value LA acting on the wheel bearing using the average value A of the output signals of the strain sensors 22A and 22B.
- Second load estimating means 32 as an arithmetic processing unit for calculating / estimating a load value LB acting on the wheel bearing using the average value A and the amplitude value B of the output signals of the strain sensors 22A, 22B. . That is, the first and second calculation estimating means 31 and 32 output the first and second load values LA and LB as calculation results, respectively.
- load estimation accuracy can be further improved by using two types of variables.
- the average value obtained from the sensor unit 20A is AA
- the amplitude value is BA
- the average value obtained from the sensor unit 20B is AB
- the amplitude value is BB.
- M2A is a predetermined correction coefficient that multiplies the average value AA
- M2B is a predetermined correction coefficient that multiplies the average value AB
- M3A is a predetermined correction coefficient that multiplies the amplitude value BA
- M3B is a predetermined correction coefficient that multiplies the amplitude value BB Is the correction coefficient.
- the value of each correction coefficient in each of the above arithmetic expressions is set by obtaining in advance by a test or simulation. The calculations by the first load estimating means 31 and the second load estimating means 32 are performed
- the sensor unit 20A (20B) Since the sensor unit 20A (20B) is provided at an axial position around the rolling surface 3 of the outboard side row of the outer member 1, the output signals a and b of the strain sensors 22A and 22B are shown in FIG. Thus, it is influenced by the rolling element 5 that passes in the vicinity of the installation part of the sensor unit 20A (20B). That is, the influence of this rolling element 5 acts as the above-described offset.
- the output signals a and b of the strain sensors 22A and 22B are affected by the position of the rolling element 5. That is, when the rolling element 5 passes the position closest to the strain sensors 22A and 22B in the sensor unit 20A (20B) (or when the rolling element 5 is at that position), the output signals a and 22a of the strain sensors 22A and 22B The amplitude of b becomes the maximum value, and decreases as the rolling element 5 moves away from the position as shown in FIG. 6 (or when the rolling element 5 is located away from the position).
- the rolling elements 5 sequentially pass through the vicinity of the installation portion of the sensor unit 20A (20B) at a predetermined arrangement pitch P, so that the output signals a and b of the strain sensors 22A and 22B are output from the arrangement of the rolling elements 5.
- the waveform is close to a sine wave that changes periodically.
- the output signals a and b of the strain sensors 22A and 22B are affected by temperature and hysteresis due to slippage between the knuckle 16 and the body mounting flange 1a (FIG. 1).
- the sum of the output signals a and b of the two strain sensors 22A and 22B is set as the above-described average value A, and the absolute value
- ab ⁇ is obtained from the difference between the output signals a and b, and is averaged over time.
- the value obtained by calculating the RMS value (root mean square value) from the difference between the output signals a and b is referred to as the amplitude value B described above.
- the average value A is a value obtained by canceling the fluctuation component due to the passage of the rolling elements 5.
- the amplitude value B is a value that offsets the influence of temperature appearing in the output signals a and b of the two strain sensors 22A and 22B and the influence of slippage between the knuckle and flange surfaces. Therefore, by using the average value A and the amplitude value B, the load acting on the wheel bearing and the tire ground contact surface can be accurately detected.
- FIG. 6 showing the configuration example of FIG. 5 as the sensor unit 20A (20B), among the three contact fixing portions 21a arranged in the circumferential direction of the outer diameter surface of the outer member 1 which is a fixing side member,
- the interval between the two contact fixing portions 21 a located at both ends of the array is set to be the same as the array pitch P of the rolling elements 5.
- the circumferential interval between the two strain sensors 22A and 22B respectively disposed at the intermediate positions of the adjacent contact fixing portions 21a is approximately 1 ⁇ 2 of the arrangement pitch P of the rolling elements 5. .
- the output signals a and b of the two strain sensors 22A and 22B have a phase difference of about 180 degrees, and the average value A obtained as the sum is obtained by canceling the fluctuation component due to the passage of the rolling element 5. It becomes. Further, the amplitude value B obtained as the difference is a value obtained by offsetting the influence of temperature and the influence of slippage between the knuckle and the flange surface.
- the interval between the contact fixing portions 21 a is set to be the same as the arrangement pitch P of the rolling elements 5, and one strain sensor 22 ⁇ / b> A, 22 ⁇ / b> B is disposed at an intermediate position between the adjacent contact fixing portions 21 a.
- the circumferential interval between the two strain sensors 22A and 22B is set to be approximately 1 ⁇ 2 of the arrangement pitch P of the rolling elements 5.
- the circumferential interval between the two strain sensors 22A and 22B may be directly set to 1 ⁇ 2 of the arrangement pitch P of the rolling elements 5.
- the circumferential interval between the two strain sensors 22A and 22B may be ⁇ 1/2 + n (n: integer) ⁇ times the arrangement pitch P of the rolling elements 5, or a value approximated to these values. good.
- the average value A obtained as the sum of the output signals a and b of both strain sensors 22A and 22B is a value obtained by canceling the fluctuation component due to the passage of the rolling element 5, and the amplitude value B obtained as the difference is the temperature. It is a value that offsets the influence and the effect of slippage between the knuckle and flange surfaces.
- the estimation means 30 is connected to the estimated load output means 33 at the next stage.
- the estimated load output means 33 uses the following formula (the value of 0 to 1) for the calculation results LA and LB output by the first and second load estimation means 31 and 32 in accordance with a ratio r (value of 0 to 1) according to the wheel rotational speed.
- the composition ratio r in this case is read from the composition ratio table 34 corresponding to the wheel rotation speed.
- the relationship between the wheel rotation speed mapped in the composition ratio table 34 and the composition ratio r is set as shown in FIG. 9, for example. That is, the composition ratio r is set to 1 when stationary, 1 or less during normal traveling, and set to increase again during high-speed traveling.
- the first load value LA based only on the average value A is output in the stationary state or the extremely low speed state, and when the driving state is reached and the amplitude value B is stably obtained, the second load value is gradually increased. Switch to the combined output with LB.
- the composition ratio r set in the composition ratio table 34 can be changed by a parameter from the outside.
- “mapped” means that the composition ratio r is determined corresponding to the wheel rotation speed.
- “from the outside” means other than the composition ratio table 34 and the estimated load output means 33.
- the calculation result LB of the second load estimation means 32 estimated and calculated using both the average value A and the amplitude value B is used.
- accuracy is higher. Therefore, when priority is given to accuracy over delay time, it is desirable to set the synthesis ratio r so that the LB side becomes higher. On the other hand, when it is required to make the delay time as small as possible, it is desirable to set the synthesis ratio r so that the LA ratio becomes high.
- the composition ratio r may be positively controlled to obtain a desired specific estimated load output.
- the composition ratio r is set so as to increase the ratio of LA on the side where the rotational speed of the wheel becomes high, for the following reason.
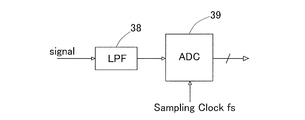
- the vibration frequency of the sensor output signal generated as shown in FIG. 6 due to the revolving motion of the rolling element 5 changes in proportion to the traveling speed of the vehicle, and therefore may reach a frequency close to the AD conversion sampling rate during high-speed traveling.
- the amplitude value calculation unit 29 cannot obtain an accurate amplitude value B due to aliasing appearing in the sampling data.
- an LPF 38 is provided on the signal input side of the AD conversion circuit 39 as shown in FIG. 10.
- the amplitude value B detected during high-speed running is detected to be small due to the influence of the LPF 38.
- FIG. 11 shows the frequency characteristics of the LPF 38.
- the first load estimation means using only the average value A by increasing the composite ratio r of the calculation result on the higher speed side than the traveling speed of about 90 km / h.
- the ratio of the first load value LA by 31 is increased. For this reason, even when an amplitude value calculation error occurs on the high speed side, the influence is reduced, and an increase in load estimation error can be suppressed. Further, since the detection delay time is reduced by increasing the ratio on the first load value LA side, a faster load detection response can be obtained when the vehicle speed is high. Since these are advantageous characteristics for various control programs for controlling the stability of the vehicle, an effect of further improving the safety and stability of the vehicle can be obtained.
- the estimated load output means 33 receives, for example, information on the wheel rotation speed from the outside, and the composition ratio r is determined based on this information. “From the outside” means from other than the estimated load output means 33, the calculation units 28 and 29 and the estimation means 30 in the preceding stage. In this case, as information on the wheel rotation speed from the outside, an output signal of a rotation speed detection sensor (not shown) installed in the wheel bearing may be directly input, or the wheel rotation speed may be input from the ECU on the vehicle body side. Information may be received. Further, as the wheel rotation speed information, the wheel rotation speed may be estimated by detecting the passing frequency of the rolling element 5 from the output signals a and b of the strain sensors 22A and 22B.
- the first and second load values LA and LB calculated by the first and second load estimation means 31 and 32 are separately output as shown in FIG.
- the second estimated load output means 35 may be provided, and a process in which the ECU on the vehicle body synthesizes these calculation results according to the traveling state may be performed. In this case, since it is possible to make a determination based on more information regarding the running state of the vehicle, it is easy to output the optimum estimated load value by controlling the above-described combination ratio r.
- the two sensor units 20A and 20B are arranged at the upper and lower positions of the outer diameter surface of the outer member 1 which is a fixed member, the vertical load Fz acting on the wheel bearing is accurately estimated. it can. If the number of sensor units 20 to be arranged is increased, it is possible to estimate the load Fx and the axial load Fy that become driving force and braking force.
- a temperature sensor 36 may be attached to the sensor units 20A and 20B, and a temperature correction means 37 for correcting the average value A of the sensor output signal by a detection signal of the temperature sensor 36 may be provided. If the temperature of the wheel bearing changes due to heat generated by the rotation of the bearing or the surrounding environment, the sensor output signals of the sensor units 20A and 20B fluctuate due to thermal expansion even if the load does not change. The effects of remain. Therefore, by providing temperature correction means 37 for correcting the average value A of the sensor output signal in accordance with the temperature of the wheel bearing or its surrounding temperature, it is possible to reduce the detected load error due to temperature.
- an Fy direction discriminating unit 40 that discriminates the direction of the axial load Fy when calculating the axial load Fy.
- the amplitude of the sensor output signals of the sensor units 20A and 20B has a periodic change close to a sine wave, but the amplitude value is an axial load (moment force). ) Varies with the magnitude of Fy.
- FIG. 12A shows the sensor output of the sensor unit 20A disposed on the upper surface portion of the outer diameter surface of the outer member 1, and FIG. 12B is disposed on the lower surface portion of the outer diameter surface of the outer member 1.
- FIG. The sensor output of the sensor unit 20B is shown.
- the horizontal axis represents the axial load Fy
- the vertical axis represents the strain amount of the outer member 1, that is, the sensor output signal
- the maximum value and the minimum value represent the maximum value and the minimum value of the vibrating signal. From these figures, when the axial load Fy is in the + direction, the load of the individual rolling elements 5 becomes smaller at the upper surface portion of the outer diameter surface of the outer member 1 (that is, the difference between the maximum value and the minimum value of the output signal is small).
- FIG. 13 is a graph showing the relationship between the difference in amplitude of the sensor output signals of the upper and lower sensor units 20A and 20B and the direction of the axial load Fy.
- the Fy direction discriminating unit 40 obtains the above difference in the amplitudes of the sensor output signals of the sensor units 20A and 20B arranged on the outer diameter surface upper surface portion and the outer diameter surface lower surface portion of the outer member 1, and calculates these values. By comparing, the direction of the axial load Fy is determined. That is, the difference in the amplitude of the sensor output signal of the sensor unit 20A on the outer surface of the outer member 1 is small, and the difference in the amplitude of the sensor output signal of the sensor unit 20B on the lower surface of the outer member is large. At this time, the Fy direction determination unit 40 determines that the direction of the axial load Fy is the + direction.
- the Fy direction determination unit 33 determines that the direction of the axial load Fy is the negative direction.
- the estimation means 30 calculates the axial load Fy by the first and second load estimation means 31 and 32 by reflecting the determination result of the Fy direction determination section 40. Processing such as reversing the sign of the parameter of the estimation formula is performed.
- the load When a load acts between the tire of the wheel and the road surface, the load is also applied to the outer member 1 which is a stationary member of the wheel bearing, and deformation occurs.
- the three or more contact fixing portions 21 a of the strain generating member 21 in the sensor unit 20 ⁇ / b> A (20 ⁇ / b> B) are fixed in contact with the outer member 1, the strain of the outer member 1 expands to the strain generating member 21.
- the distortion is detected with high sensitivity by the distortion sensors 22A and 22B, and the hysteresis generated in the output signal is also reduced.
- the first load estimating means 31 for calculating and estimating the load acting on the wheel bearing using the average value A of the output signals of the strain sensors 22A and 22B of the sensor unit 20A (20B), and the amplitude of the sensor output signal Second load estimating means 32 for calculating / estimating the load acting on the wheel bearing using the value B and the average value A is provided, and the calculation results output by both the load estimating means 31, 32 are used to rotate the wheel. Since the estimated load output means 33 that outputs the estimated load value by combining with the ratio r according to the speed is provided, the following effects can be obtained.
- the detection time delay due to the load estimation calculation process can be minimized, and control using the obtained load information becomes easy.
- the delay time of the estimated load output also changes abruptly, and as a result, a detection error is observed.
- the two calculation results described above are combined at the continuously changing combination ratio r, there is no discontinuous change in the obtained estimated load value, and the use of the estimated load value for various vehicle controls is facilitated.
- the first load value LA based only on the average value A can be output in a stationary state or an extremely low speed state, a load state that acts between the tire and the road surface even when the vehicle is stationary Can be detected.
- the vibration frequency of the sensor output signal may reach a value close to the AD conversion sampling rate during high-speed running, but the above two calculation results are synthesized using the synthesis ratio r.
- Even when an error of B occurs by increasing the ratio of the first load value LA calculated using only the average value A, the influence of the error of the amplitude value B can be reduced, and the load detection accuracy is increased. be able to.
- FIG. 14 shows the circumferential direction on the upper surface portion, the lower surface portion, the right surface portion, and the left surface portion of the outer diameter surface of the outer member 1 that is the fixed side member, which is the vertical position and the left and right position with respect to the tire ground contact surface
- the front view seen from the outboard side of 2nd Embodiment which arranged four sensor units 20A, 20B, 20C, and 20D equally with a 90 degree phase difference is shown.
- Other configurations except for the arrangement configuration of the sensor units 20A to 20D are the same as those in the previous embodiment.
- a third embodiment of the present invention will be described with reference to FIGS.
- portions corresponding to the matters described in the preceding embodiments are denoted by the same reference numerals, and overlapping descriptions are omitted.
- the other parts of the configuration are the same as those of the embodiment described above.
- the same components have the same effects.
- the embodiments may be partially combined as long as the combination does not hinder the combination.
- the sensor-equipped wheel bearing according to the third embodiment performs load estimation calculation processing without using a rotation sensor signal or wheel rotation speed information from the vehicle so that an accurate estimated load value can be obtained.
- the average value calculation unit 28 and the amplitude value calculation unit 29 are used as signal preprocessing means 42, and the signal preprocessing means 42 is connected to the estimation means 30.
- the signal preprocessing means 42 is also connected to the rotational speed evaluation means 36 as shown in FIG.
- the rotational speed evaluation means 36 discriminates the rotational speed of the wheel by using the average value A and the amplitude value B obtained from the output signals a and b of the respective strain sensors 22A and 22B in the signal preprocessing means 42. This is means for obtaining an evaluation value V as an index.
- the estimation means 30 is connected to the estimated load output means 33A at the next stage.
- the estimated load output means 33A combines the calculation results (load values) LA and LB in the two load estimation means 31 and 32 of the estimation means 30 and outputs the final estimated load value Lout.
- the two calculation results LA and LB are combined by a ratio r (t) corresponding to an elapsed time t after the evaluation value V obtained by the rotational speed evaluation means 36 crosses a predetermined threshold value Vth. Done in The threshold value Vth is read from the memory 41.
- an average value A and an amplitude value B are obtained from the output signals S of the respective strain sensors 22A and 22B, and an evaluation value V for discriminating the rotational speed using them is used as the rotational speed evaluation means. 36.
- the rotational speed evaluation means 36 compares the calculated evaluation value V with a separately determined threshold value Vth, so that the current state is in the rotational speed region RA using the first calculation result LA in the estimation means 30. Or the rotational speed region RB using the second calculation result LB is determined.
- the evaluation value V for discriminating the rotational speed for example, a value obtained by selecting and summing the amplitude values B of the output signals of the respective strain sensors 22A and 22B input within a predetermined time is used. .
- the amplitude values B of all output signals may be summed, or the amplitude values B of some sensor output signals may be selected and summed.
- the fundamental speed component may be extracted from the output signals of the strain sensors 22A and 22B to estimate the rotation speed.
- This evaluation value V does not have to have a relationship that is exactly proportional to the rotational speed, and it is sufficient if it is possible to determine whether or not it exceeds a certain fixed speed in the low-speed rotational speed region necessary for determining the rotational speed. As a result, the accuracy required for the evaluation value V is low, so there is no need to provide a rotation sensor that outputs an accurate rotation speed or a means for inputting external sensor information, and the configuration is simple. Can be
- the average value A of the output signals of the strain sensors 22A and 22B (the sum Sum of the output signals of the two strain sensors 22A and 22B arranged at a position shifted by 1/2 of the arrangement pitch P of the rolling elements 5).
- the second calculation result LB in the calculation processing unit 36 is calculated in parallel. Then, according to the evaluation value V for discriminating the rotation speed, which calculation result is used as the estimated load value Lout is selected and output.
- the region RA is a low-speed rotational speed region
- the region RB is a normal rotational speed region
- FIG. 18 shows the relationship between the evaluation value V and the rotational speed regions RA and RB.
- FIG. 19 shows a calculation example of the estimated load value Lout in the estimated load output means 33A.
- the estimated load output means 33A calculates the composition as follows, with the time after passing the boundary as t.
- Lout (1 ⁇ r (t)) ⁇ LA + r (t) ⁇ LB;
- r (t) is a value between 0 and 1) (4)
- the switching portions can be connected smoothly.
- a preset time a (hereinafter referred to as transition time) is written in advance in the memory 41 in FIG. 17 together with the threshold value Vth. Further, the elapsed time t after passing the boundary is measured by a timer 43 provided in the rotation speed evaluation means 36.
- the calculation process is continued with the composition ratio r (t) at the initial value.
- the size of the processing target time T may be changed according to the value of the evaluation value V. good. If the processing time T is set to be longer when the rotational speed of the wheel is low and the processing time T is shortened as the rotational speed increases, the calculation process using the amplitude value B in the estimation means 30 is slow. It is possible to shorten the response time of the calculation result in a speed region where a faster response is required while suppressing deterioration in accuracy in the region. Even when the correlation between the evaluation value V and the rotation speed is low, it is possible to optimally select the processing target time T according to the rotation speed region by creating a map corresponding to the value of the evaluation value V. Become.
- the first load estimating means 31 for calculating and estimating the load acting on the wheel bearing using only the average value A of the output signals of the strain sensors 22A and 22B of the sensor unit 20A (20B), and the sensor output signal
- An estimation means 30 comprising a second load estimation means 32 for calculating / estimating a load acting on the wheel bearing using the amplitude value B and the average value A, and the wheel from the output signals of the strain sensors 22A, 22B.
- the load output means 33A is provided, and the estimated load output means 33A has the ratio r according to the elapsed time since the evaluation value V crosses a predetermined threshold value Vth. Since to perform the synthesis, effects are obtained as listed below.
- load estimation calculation processing can be performed without using a rotation sensor signal or wheel rotation speed information from the vehicle, there is no need to increase the number of signal wires, and the manufacturing cost of the load sensor can be reduced.
- the degree of freedom when mounted on can be increased. Since the load estimation error is suppressed by switching between the load estimation calculation process in the normal rotation state and the load estimation calculation process at low speed, a more accurate estimated load can be obtained. Even when the load estimation calculation processing is switched according to the rotation speed, the load signal is not discontinuously changed by the method in which the composition ratio is continuously changed, and the use of the load signal for various vehicle controls becomes easy.
- the signal can be used for vehicle control or the like without depending on the traveling state.
- the present invention can also be applied to a wheel bearing in which the inner member is a fixed side member.
- the sensor unit 20 is provided on the peripheral surface that is the inner periphery of the inner member.
- the present invention is for a first generation or second generation type wheel in which the bearing portion and the hub are independent parts.
- the present invention can also be applied to a bearing or a fourth-generation type wheel bearing in which a part of the inner member is composed of an outer ring of a constant velocity joint.
- this sensor-equipped wheel bearing can be applied to a wheel bearing for a driven wheel, and can also be applied to a tapered roller type wheel bearing of each generation type.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Rolling Contact Bearings (AREA)
Abstract
センサの非線形特性を補正して荷重推定誤差を低減させつつ、様々な入力荷重状態に応じて連続的な推定荷重値を演算し、できるだけ小さな検出時間遅れで推定荷重値を出力できるセンサ付車輪用軸受を提供する。車輪用軸受の外方部材(1)と内方部材(2)のうちの固定側部材にセンサユニット(20A),(20B)を設ける。センサユニットは、固定側部材に接触固定される3つ以上の接触固定部を有する歪み発生部材(21)と、この歪み発生部材(21)に取付けられて歪みを検出する2つ以上のセンサ(22A),(22B)とでなる。車輪用軸受に作用する荷重を、センサ出力信号の平均値から演算する第1の荷重推定手段(31)と、センサ出力信号の平均値と振幅値とから演算する第2の荷重推定手段(32)と、これらの荷重推定手段(32)の演算結果を車輪回転速度に応じた比率で合成して推定荷重値を出力する推理荷重出力手段(33)とを設ける。
Description
本出願は、2010年11月15日出願の特願2010-254416および2011年7月25日出願の特願2011-161754の優先権を主張するものであり、その全体を参照により本願の一部をなすものとして引用する。
この発明は、車輪の軸受部にかかる荷重を検出する荷重センサを内蔵したセンサ付車輪用軸受に関する。
自動車の各車輪にかかる荷重を検出する技術として、車輪用軸受の外輪に歪みゲージを貼り付け、外輪外径面の歪みから荷重を検出するようにした車輪用軸受が提案されている(例えば特許文献1)。しかし、特許文献1に開示の技術では、車輪用軸受に作用する荷重を検出する場合、荷重に対する固定輪変形量が小さいため歪み量も小さく、検出感度が低くなり、荷重を精度良く検出できない。
この課題を解決するものとして、以下の構成としたセンサ付車輪用軸受が提案されている(特許文献2)。同文献のセンサ付車輪用軸受における車輪用軸受は、複列の転走面が内周に形成された外方部材と、上記転走面と対向する転走面が外周に形成された内方部材と、両部材の対向する転走面間に介在した複列の転動体とを備え、車体に対して車輪を回転自在に支持する。上記外方部材および内方部材のうちの固定側部材の外径面には、その固定側部材の円周方向における180度の位相差をなす位置に配置された2つのセンサユニットからなるセンサユニット対を少なくとも1対設ける。各センサユニットは、前記固定側部材の外径面に接触して固定される2つ以上の接触固定部を有する歪み発生部材、およびこの歪み発生部材に取付けられて歪み発生部材の歪みを検出するセンサを有するものとする。
この構成において、前記センサユニット対における2つのセンサユニットのセンサ出力信号の差分を基に、径方向荷重推定手段で、車輪用軸受の径方向に作用する径方向荷重を推定する。また、前記センサユニット対における2つのセンサユニットのセンサ出力信号の和を基に、軸方向荷重推定手段で、車輪用軸受の軸方向に作用する軸方向荷重を推定する。そして、少なくとも1対のセンサユニット対の2つのセンサユニットは、タイヤ接地面に対して上下位置となる前記固定側部材の外径面の上面部と下面部に配置する。このセンサユニット対のセンサの出力信号振幅を基に、軸方向荷重方向判別手段で、前記軸方向荷重の方向を判別する。この場合の荷重推定処理の概略を図20にブロック図で示す。
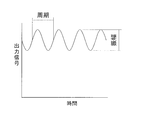
前記センサユニットにおける歪み発生部材の接触固定部を、車輪用軸受における固定側部材の転走面付近に配置すると、車輪の回転に伴ってセンサ出力信号に図21のような正弦波に近い変動が見られる。これは、転動体の通過による歪みの変化が検出されたものである。上記構成では、上下に配置した2つのセンサユニットのセンサ出力信号における振幅値(転動体の公転運動に伴う振動成分)の差分により、軸方向荷重を判別し、軸方向荷重の正負に応じて、それぞれに適した荷重推定パラメータを用いて荷重を演算するので、荷重を感度良く推定できる。
しかし、特許文献2の構成の場合、最適な荷重推定パラメータを選択するために、センサ出力信号の振幅値を算出する必要があり、振幅値を算出できない場合に対応できない。すなわち、回転が静止している状態、あるいは極低速回転状態においては、転動体荷重による信号変化がないか、または非常にゆっくりとした変化しかない状態となる。この場合には、センサ出力信号の変動から振幅の大きさを求めることはできない。
一方、転動体荷重によるセンサ出力信号の振幅値を静止状態においても検出する手段として、転動体荷重の影響を観測するのに十分な領域(転動体の配置ピッチに相当する周方向長さ)に複数のセンサを配置して、歪みの分布を直接測定する手段もある。しかしながら、この場合、センサ個数が増加し、検出回路が複雑化するため、コストアップと信頼性確保が新たな課題となる。
そこで、本発明者等は、センサ付車輪用軸受におけるさらに新たな荷重推定手段として、図22にブロック図で示す構成のものを開発した(特許文献3)。
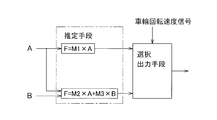
この構成による荷重推定手段は、車輪用軸受に作用する荷重を、センサ出力信号の平均値のみから演算・推定する第1の荷重推定手段と、センサ出力信号の平均値と振幅値とから演算・推定する第2の荷重推定手段と、これら両荷重推定手段のうちのいずれかの推定荷重値を車輪回転速度に応じて切り替え選択して出力する選択出力手段とを設けたものである。
この構成では、荷重推定演算式として、変数としてセンサ出力信号の平均値Aのみを用いる式と、変数としてセンサ出力信号の平均値Aと振幅値Bとを用いる式とを用意し、車輪回転速度によって荷重演算処理を切り替えるようにしている。すなわち、通常走行状態では、センサ出力信号の平均値Aと振幅値Bを用いた演算式による荷重推定演算を行い、低速あるいは停止状態においては前記平均値Aだけを用いた演算式による荷重推定演算を行う。この構成の場合、回転速度の判定に、回転速度情報を用いる。
特許文献2や特許文献3の構成のもののように、検出されたセンサ出力信号の状態や推定された荷重の状態に応じて、複数の荷重推定パラメータの中から最適なものを選択し、推定荷重を演算する構成とした場合、センサの非線形特性などが補正された誤差の小さな検出結果を得ることができる。
しかし、センサ出力信号の振幅値を演算によって求める場合、ある一定時間内もしくは一定のサンプリング個数のセンサ出力信号を用いた演算処理が必要になるため、信号処理による時間遅れが発生する。例えば、一定時間T内のセンサ出力信号の自乗平均値(RMS値)を算出し、その値を現在の振幅値として用いると、略T/2の時間遅れが発生することになる。特に、特許文献3の構成のもののように、変数としてセンサ出力信号の平均値Aのみを用いる荷重推定演算式と、平均値Aと振幅値Bとを用いる荷重推定演算式とを、走行速度(車輪回転速度)によって切り替え使用する場合には、その切り替えにより推定荷重出力の遅れ時間も変化するため、検出誤差となって観測される。
また、2つの演算式による演算結果には違いが発生する場合もあり、その状態で荷重推定演算式の切り替えを行うと、推定荷重出力が不連続に変化する場合がある。検出した推定荷重値に基づいて各種の操作を実行する制御システムにとっては、上記のような推定荷重出力の不連続な変化や大きな検出誤差は好ましくない。
これらの不具合を防止するために、回転センサを搭載して車輪の回転速度を検出したり、車両側から別途、車輪の回転速度情報を入手したりすることで、2つの演算式による演算結果を回転速度に応じて連続的に切り替えることも可能だが、回転速度情報が得られない状況では対処できない。
これとは別に、回転センサ等の情報を用いずに、センサ出力信号から回転速度に準ずる評価値を算出し、この評価値に基づいて荷重演算処理を切り替えることも考えられる。この方法では、回転センサ信号を用いることができない状況、あるいは回転速度情報を連続的に安定して取得することができない状況においても、回転速度に準じた評価値を得ることができる。しかし、この評価値で、低速回転状態か否かを判別することは可能だが、速度に正確に比例する評価値とはならないため、速度に応じて連続的に切り替える処理に適用するのは難しい。
さらに、センサ出力信号をAD変換回路によってデジタル数値化してサンプリングする処理回路を構成した場合においては、軸受転動体の公転運動によって発生するセンサ出力信号の振動周波数が、車両の走行速度に比例して変化するため、高速走行時にはAD変換のサンプリングレートに近い周波数に達することがある。この場合、サンプリングデータに現れるエイリアシングにより正確な振幅値Bが得られなくなってしまう。エイリアシングを低減するためには、信号入力側にLPF(低域通過フィルタ)を設ける。しかし、その結果、高速走行時に検出される振幅値Bは、LPFの影響を受けて小さく検出されることになり、荷重推定誤差が増加してしまう。このような不連続な変化や検出誤差が大きくなることは、検出した推定荷重値に基づいて各種の操作を実行する自動車などにおける制御システムにとっては好ましくない。
この発明の目的は、センサの非線形特性を補正して荷重推定誤差を低減させつつ、様々な入力荷重状態に応じて連続的な推定荷重値を演算し、できるだけ小さな検出時間遅れで推定荷重値を出力できるセンサ付車輪用軸受を提供することであり、他の目的は、回転センサの信号や、車両からの車輪回転速度情報を用いることなく、荷重推定演算処理を行うことができ、正確な推定荷重値を得ることができるセンサ付車輪用軸受を提供することである。以下、この発明の概要について、実施形態を示す図面中の符号を用いて説明する。
この発明の第1構成にかかるセンサ付車輪用軸受は、複列の転走面が内周に形成された外方部材1と、前記転走面と対向する転走面が外周に形成された内方部材2と、両部材の対向する転走面間に介在した複列の転動体5とを備え、車体に対して車輪を回転自在に支持する車輪用軸受であって、上記外方部材1および内方部材2のうちの固定側部材に、この固定側部材に接触して固定される3つ以上の接触固定部21aを有する歪み発生部材21、およびこの歪み発生部材21に取付けられてこの歪み発生部材21の歪みを検出する2つ以上のセンサ22A,22Bからなる荷重検出用センサユニット20A,20Bを設ける。
前記センサ22A,22Bの出力信号の平均値Aを用いて車輪用軸受に作用する荷重を演算・推定する第1の荷重推定手段31と、前記センサ22A,22Bの出力信号の平均値Aと振幅値Bとを用いて車輪用軸受に作用する荷重を演算・推定する第2の荷重推定手段32と、これらの荷重推定手段31,32が出力する演算結果を車輪回転速度に応じた比率rで合成して推定荷重値を出力する推定荷重出力手段33とを設ける。
この構成によると、車輪のタイヤと路面間に荷重が作用するとき、車輪用軸受の固定側部材(例えば外方部材1)にも荷重が印加されて変形が生じる。ここではセンサユニット20A(20B)における歪み発生部材21の3つ以上の接触固定部21aが、外方部材に接触固定されているので、外方部材1の歪みが歪み発生部材21に拡大して伝達され易く、その歪みがセンサ22A,22Bで感度良く検出され、その出力信号に生じるヒステリシスも小さくなる。
特に、センサユニット20A(20B)の歪みセンサ22A,22Bの出力信号の平均値Aを用いて車輪用軸受に作用する荷重を演算・推定する第1の荷重推定手段31と、センサ出力信号の振幅値Bと前記平均値Aとを用いて車輪用軸受に作用する荷重を演算・推定する第2の荷重推定手段32とを設け、これら両荷重推定手段31,32が出力する演算結果を車輪回転速度に応じた比率rで合成して推定荷重値を出力する推定荷重出力手段33を設けているので、以下に列挙するような効果が得られる。
・荷重推定演算処理による検出時間遅れを最小限に抑えることができ、得られた荷重情報を利用した制御が容易になる。
・従来例(特許文献3)のように荷重推定処理を切り替える方法では、推定荷重出力の遅れ時間も急激に変化するため、結果として検出誤差となって観測されてしまうが、このセンサ付車輪用軸受では連続的に変化する合成比率rで前記した2つの演算結果を合成するため、得られる推定荷重値に不連続変化がなくなり、各種の車両制御への推定荷重値の利用が容易となる。
・また、静止状態あるいは極低速状態では前記平均値Aのみによる第1の荷重値LAが出力されるようにできるため、車両が静止した状態であっても、タイヤと路面間に作用する荷重状態を検出できる。
・また、合成比率rを用いて前記した2つの演算結果を合成するので、この合成比率rの値を制御して、所望の特定の推定荷重値が得られるように構成することができる。
・高速走行時には、センサ出力信号の振動周波数はAD変換のサンプリングレートに近い値に達することがあるが、合成比率rを用いて前記した2つの演算結果を合成するので、高速走行時に前記振幅値Bの誤差が発生してきた場合でも、前記平均値Aのみを用いて演算される第1の荷重値LAの比率を高めることで振幅値Bの誤差の影響を小さくでき、荷重の検出精度を高めることができる。
・従来例(特許文献3)のように荷重推定処理を切り替える方法では、推定荷重出力の遅れ時間も急激に変化するため、結果として検出誤差となって観測されてしまうが、このセンサ付車輪用軸受では連続的に変化する合成比率rで前記した2つの演算結果を合成するため、得られる推定荷重値に不連続変化がなくなり、各種の車両制御への推定荷重値の利用が容易となる。
・また、静止状態あるいは極低速状態では前記平均値Aのみによる第1の荷重値LAが出力されるようにできるため、車両が静止した状態であっても、タイヤと路面間に作用する荷重状態を検出できる。
・また、合成比率rを用いて前記した2つの演算結果を合成するので、この合成比率rの値を制御して、所望の特定の推定荷重値が得られるように構成することができる。
・高速走行時には、センサ出力信号の振動周波数はAD変換のサンプリングレートに近い値に達することがあるが、合成比率rを用いて前記した2つの演算結果を合成するので、高速走行時に前記振幅値Bの誤差が発生してきた場合でも、前記平均値Aのみを用いて演算される第1の荷重値LAの比率を高めることで振幅値Bの誤差の影響を小さくでき、荷重の検出精度を高めることができる。
以上の結果から、センサの非線形特性を補正して荷重推定誤差を低減させつつ、様々な入力荷重状態に応じて連続的な推定荷重値を演算し、できるだけ小さな検出時間遅れで推定荷重値を出力できる。また、推定荷重値が不連続になる状態が発生しにくくなるため、推定した荷重値に基づいて各種の操作を実行する制御システムにも適合しやすいものとなる。
この発明において、前記センサユニット20A(20B)では、隣り合う第1および第2の接触固定部21aの間、および隣り合う第2および第3の接触固定部21aの間に各センサ22A,22Bをそれぞれ取付け、隣り合う接触固定部21aもしくは隣り合うセンサ22A,22Bの前記固定部材の円周方向についての間隔を、転動体の配列ピッチの{1/2+n(n:整数)}倍とし、前記第1および第2の荷重推定手段31,32は前記2つのセンサ22A,22Bの出力信号の和を平均値Aとして用いるものとしても良い。
この構成の場合、2つのセンサ22A,22Bの出力信号は略180度の位相差を有することになり、その平均値Aは転動体通過による変動成分をキャンセルした値となる。また、振幅値Bは温度の影響やナックル・フランジ面間などの滑りの影響を十分相殺した値となる。これにより、2つのセンサ22A,22Bの出力信号の平均値Aは転動体通過による変動成分をキャンセルした値となり、振幅値Bは、温度の影響やナックル・フランジ面間などの滑りの影響をより確実に排除した正確なものとなる。
この発明において、前記推定荷重出力手段33で用いる合成比率rは、車輪停止状態から車輪回転速度が低速状態の間でr=1と設定されているのが望ましい。
また、この発明において、前記推定荷重出力手段33で用いる合成比率rは、車輪回転速度が通常速度の状態から高速状態になるにつれて高くなるように設定されているのが望ましい。
前記推定荷重出力手段33で用いられる合成比率rは、車輪回転速度に対応してマップ化されており、外部からパラメータで変更可能にされていても良い。なお、ここで言う「マップ化されて」とは、車輪回転速度に対応して合成比率rが定められていることを言う。また、「外部から」とは、推定荷重出力手段33や、前記マップ化した情報を定めた手段、および推定荷重出力手段33の前段となる各処理手段以外からを意味する。
この発明において、前記推定荷重出力手段33は、車輪用軸受に設置された車輪回転速度検出センサの出力信号を直接入力して車輪回転速度を検出するものとしても良い。
また、この発明において、前記推定荷重出力手段33は、車体側のECU(電気制御ユニット)から車輪回転速度の情報を受けるものとしても良い。
また、この発明において、前記推定荷重出力手段33は、前記センサ22A,22Bの出力信号に含まれる転動体5の公転運動による振幅成分の周波数から車輪回転速度を検出するものとしても良い。
この発明において、前記センサユニット20A(20B)を3つ以上設け、前記第1および第2の荷重推定手段31,32は、前記3つ以上のセンサユニット20A(20B)のセンサ22A,22Bの出力信号から車輪用軸受の径方向に作用する径方向荷重Fx,Fzおよび車輪用軸受の軸方向に作用する軸方向荷重Fyを演算・推定するものとしても良い。
この発明において、前記センサユニット20A(20B)を、タイヤ接地面に対して上下位置および左右位置となる前記固定側部材の外径面の上面部、下面部、右面部、および左面部に円周方向90度の位相差で4つ等配しても良い。このように4つのセンサユニットを配置することで、車輪用軸受に作用する垂直方向荷重Fz、駆動力や制動力となる荷重Fx、軸方向荷重Fyを、より精度良く推定することができる。
この発明において、前記センサユニット20A(20B)に温度センサ19を取付け、この温度センサ19の検出信号により前記センサ出力信号を補正する温度補正手段37を設けても良い。軸受回転による発熱や周辺環境などにより車輪用軸受の温度が変化すると、荷重が変化しなくても、センサユニット20A(20B)のセンサ出力信号は熱膨張などにより変動するので、検出された荷重に温度の影響が残る。そこで、車輪用軸受の温度またはその周辺温度に応じてセンサ出力信号の平均値Aを補正する温度補正手段37を設けると、温度による検出荷重誤差を低減することができる。
この発明において、前記推定荷重出力手段33とは別に、前記第1の荷重推定手段31が演算・推定する第1の荷重値LAと、前記第2の荷重推定手段32が演算・推定する第2の荷重値LBを、個別に外部に出力する第2の推定荷重出力手段35を設けても良い。このように、前記推定荷重出力手段33とは別個に、第1および第2の荷重推定手段31,32で演算された第1の荷重値LA,LBを別々に出力する第2の推定荷重出力手段35を設けると、これらの演算結果を車体側のECUが走行状態に応じて合成する処理を行うことができる。この場合、車両の走行状態に関するより多くの情報に基づいて判断することが可能になるので、上記した合成比率rを制御して、最適な推定荷重値を出力することが容易になる。
この発明において、さらに、前記各センサ22A,22Bの出力信号から車輪の回転速度を表す評価値Vを求める回転速度評価手段36を設け、前記推定荷重出力手段33Aは、前記評価値Vが予め定めたしきい値Vthを横切ってからの経過時間に応じた比率rで前記演算結果の合成を行う。
この構成によると、特に、センサユニット20A(20B)のセンサ22A,22Bの出力信号の平均値Aのみを用いて車輪用軸受に作用する荷重を演算・推定する第1の荷重推定手段31、およびセンサ22A,22Bの出力信号の振幅値Bと前記平均値Aとを用いて車輪用軸受に作用する荷重を演算・推定する第2の荷重推定手段32からなる2つの推定手段30と、前記各センサ22A,22Bの出力信号から車輪の回転速度を表す評価値Vを求める回転速度評価手段36と、前記評価値Vに基づき前記推定手段30における推定手段31,32の演算結果を合成して推定荷重値を出力する推定荷重出力手段33Aとを設け、この推定荷重出力手段33Aは、前記評価値Vが予め定めたしきい値Vthを横切ってからの経過時間に応じた比率rで前記演算結果の合成を行うようにしているので、以下に列挙するような効果が得られる。
・回転センサの信号や、車両からの車輪回転速度情報を用いることなく、荷重推定演算処理を行うことができるため、信号配線本数の増加が必要なく、荷重センサの製造コストを抑えられるとともに、車両に搭載するときの自由度を高めることができる。
・通常の回転状態における荷重推定演算処理と、低速時の荷重推定演算処理とを切り替えることにより、荷重推定誤差が抑制されるため、より正確な推定荷重値を得ることができる。
・回転速度に応じて荷重推定演算処理を切り替えるときにも、連続的に合成比率が変化する方法により荷重信号の不連続変化がなくなり、各種の車両制御への荷重信号の利用が容易になる。
・走行中に急ブレーキを動作させた場合には、急激に回転速度が変化してスリップ状態となることもあるが、車輪の回転が静止状態あるいは極低速状態であっても推定荷重値が出力されるため、走行状態に依存することなく車両制御等に信号を利用することができる。
・通常の回転状態における荷重推定演算処理と、低速時の荷重推定演算処理とを切り替えることにより、荷重推定誤差が抑制されるため、より正確な推定荷重値を得ることができる。
・回転速度に応じて荷重推定演算処理を切り替えるときにも、連続的に合成比率が変化する方法により荷重信号の不連続変化がなくなり、各種の車両制御への荷重信号の利用が容易になる。
・走行中に急ブレーキを動作させた場合には、急激に回転速度が変化してスリップ状態となることもあるが、車輪の回転が静止状態あるいは極低速状態であっても推定荷重値が出力されるため、走行状態に依存することなく車両制御等に信号を利用することができる。
この発明において、前記推定手段30における演算処理に用いる前記各センサ22A,22Bの出力信号の平均値Aと振幅値Bは、一定時間T内の各センサ22A,22Bの出力信号を用いても良い。この場合に、前記一定時間Tの値は、前記回転速度評価手段36が求める評価値Vに応じて変化させても良い。車輪の回転速度が低い状態では前記一定時間Tを長めに設定し、回転速度が速くなると前記一定時間Tが短くなるように構成すると、推定手段30での振幅値Bを用いた演算処理が低速領域で精度劣化するのを抑えつつ、より高速な応答が求められる速度領域では演算結果の応答時間を短くすることができる。
この発明において、前記推定荷重出力手段33Aで用いる合成比率rは、前記評価値Vが予め定めたしきい値Vthを横切ってからの経過時間を変数とする一次関数で決定されるものとしても良い。
この発明において、前記推定荷重出力手段33Aで用いる合成比率rは、前記評価値Vが予め定めたしきい値Vthを横切ってからの経過時間を変数とする二次以上の関数で決定されるものとしても良い。
この発明において、前記推定荷重出力手段33Aで用いる合成比率rの変化は、前記評価値Vが予め定めたしきい値thを横切ってからの経過時間のうち、予め設定された遷移時間aの経過で完了するものとしても良い。
この場合に、前記評価値Vが予め定めたしきい値Vthを横切ってから再度しきい値Vthを横切るまでの経過時間が、前記遷移時間aに満たない場合、再度しきい値Vthを横切ったときの合成比率rを初期値として、以後の合成比率rが変化するものとしても良い。
この発明において、前記回転速度評価手段36は、各センサ22A,22Bの出力信号の振幅値Bを選択して合計した値を前記評価値Vとして求めるものとしても良い。
この発明において、前記回転速度評価手段36は、前記センサ22A,22Bの出力信号に含まれる転動体の公転運動による振幅成分の周波数から前記評価値Vを求めるものとしても良い。
請求の範囲および/または明細書および/または図面に開示された少なくとも2つの構成のどのような組合せも、本発明に含まれる。特に、請求の範囲の各請求項の2つ以上のどのような組合せも、本発明に含まれる。
この発明は、添付の図面を参考にした以下の好適な実施形態の説明から、より明瞭に理解されるであろう。しかしながら、実施形態および図面は単なる図示および説明のためのものであり、この発明の範囲を定めるために利用されるべきものではない。この発明の範囲は添付の請求の範囲によって定まる。添付図面において、複数の図面における同一の符号は、同一または相当する部分を示す。
この発明の第1実施形態にかかるセンサ付車輪用軸受の縦断面図とその検出系の概念構成のブロック図とを組み合わせて示す図である。
同センサ付車輪用軸受の外方部材をアウトボード側から見た正面図である。
同センサ付車輪用軸受におけるセンサユニットの拡大平面図である。
図3におけるIV-IV線断面図である。
センサユニットの他の設置例を示す縦断面図である。
センサユニットの出力信号に対する転動体位置の影響の説明図である。
センサ出力信号の平均値と振幅値を演算する演算部の回路例のブロック図である。
平均値および振幅値から荷重を推定・出力する回路部のブロック図である。
車輪回転速度と合成比率との関係の一例を示すグラフである。
センサ出力信号の前処理部におけるサンプリング処理回路の一構成例を示すブロック図である。
同サンプリング処理回路におけるLPFの周波数特性を示すグラフである。
(A)は外方部材外径面上部でのセンサ出力信号の振幅と軸方向荷重の方向との関係を示すグラフ、(B)は同外径面下部でのセンサ出力信号の振幅と軸方向荷重との関係を示すグラフである。
軸方向荷重の大きさと上下のセンサユニットのセンサ出力信号の差分との関係を示すグラフである。
この発明の第2実施形態にかかるセンサ付車輪用軸受の外方部材をアウトボード側から見た正面図である。
この発明の第3実施形態にかかるセンサ付車輪用軸受の縦断面図とその検出系の概念構成のブロック図とを組み合わせて示す図である。
センサ出力信号の平均値と振幅値を演算する演算処理部の回路例のブロック図である。
検出系の全体の構成を示すブロック図である。
評価値Vと回転速度領域RA,RBとの関係を示す図である。
推定荷重出力手段での推定荷重値Loutの算出例を示す図である。
従来例における荷重推定処理の流れを示す説明図である。
同従来例におけるセンサ出力信号の波形図である。
他の従来例における荷重推定手段の概略構成を示すブロック図である。
この発明の第1実施形態を図1ないし図13と共に説明する。この実施形態は、第3世代型の内輪回転タイプで、駆動輪支持用の車輪用軸受に適用したものである。なお、この明細書において、車両に取付けた状態で車両の車幅方向の外側寄りとなる側をアウトボード側と呼び、車両の中央寄りとなる側をインボード側と呼ぶ。
このセンサ付車輪用軸受における軸受は、図1に縦断面図で示すように、内周に複列の転走面3を形成した外方部材1と、これら各転走面3に対向する転走面4を外周に形成した内方部材2と、これら外方部材1および内方部材2の転走面3,4間に介在した複列の転動体5とで構成される。この車輪用軸受は、複列のアンギュラ玉軸受型とされていて、転動体5はボールからなり、各列毎に保持器6で保持されている。上記転走面3,4は断面円弧状であり、ボール接触角が背面合わせとなるように形成されている。外方部材1と内方部材2との間の軸受空間の両端は、一対のシール7,8によってそれぞれ密封されている。
外方部材1は固定側部材となるものであって、車体の懸架装置(図示せず)におけるナックル16に取付ける車体取付用フランジ1aを外周に有し、全体が一体の部品とされている。フランジ1aには周方向複数箇所にナックル取付用のねじ孔14が設けられ、インボード側よりナックル16のボルト挿通孔17に挿通したナックルボルト(図示せず)を前記ねじ孔14に螺合することにより、車体取付用フランジ1aがナックル16に取付けられる。
内方部材2は回転側部材となるものであって、車輪取付用のハブフランジ9aを有するハブ輪9と、このハブ輪9の軸部9bのインボード側端の外周に嵌合した内輪10とでなる。これらハブ輪9および内輪10に、前記各列の転走面4が形成されている。ハブ輪9のインボード側端の外周には段差を持って小径となる内輪嵌合面12が設けられ、この内輪嵌合面12に内輪10が嵌合している。ハブ輪9の中心には貫通孔11が設けられている。ハブフランジ9aには、周方向複数箇所にハブボルト(図示せず)の圧入孔15が設けられている。ハブ輪9のハブフランジ9aの根元部付近には、車輪および制動部品(図示せず)を案内する円筒状のパイロット部13がアウトボード側に突出している。
図2は、この車輪用軸受の外方部材1をアウトボード側から見た正面図を示す。なお、図1の車輪用軸受は、図2におけるI-I矢視断面図を示す。前記車体取付用フランジ1aは、図2のように、各ねじ孔14が設けられた円周方向部分が他の部分よりも外径側へ突出した突片1aaとされている。
固定側部材である外方部材1の外径面には、2つのセンサユニット20A,20Bが設けられている。ここでは、これらのセンサユニット20A,20Bが、タイヤ接地面に対して上下位置となる外方部材1の外径面における上面部および下面部にそれぞれ設けられている。
これらのセンサユニット20A,20Bは、図3および図4に拡大平面図および拡大断面図で示すように、歪み発生部材21と、この歪み発生部材21に取付けられて歪み発生部材21の歪みを検出する2つ以上(ここでは2つ)の歪みセンサ22A,22Bとでなる。歪み発生部材21は、鋼材等の弾性変形可能な金属製で2mm以下の薄板材からなり、平面概形が全長にわたり均一幅の帯状で両側辺部に切欠き部21bを有する。切欠き部21bの隅部は断面円弧状とされている。
また、歪み発生部材21は、外方部材1の外径面にスペーサ23を介して接触固定される3つ以上(ここでは3つ)の接触固定部21aを有する。3つの接触固定部21aは、歪み発生部材21の長手方向に向け1列に並べて配置される。2つの歪みセンサ22A,22Bは、歪み発生部材21における各方向の荷重に対して歪みが大きくなる箇所に貼り付けられる。具体的には、歪み発生部材21の外面側で隣り合う接触固定部21aの間に配置される。つまり、図4において、左端の接触固定部21aと中央の接触固定部21aとの間に1つの歪みセンサ22Aが配置され、中央の接触固定部21aと右端の接触固定部21aとの間に他の1つの歪みセンサ22Bが配置される。
切欠き部21bは、図3のように、歪み発生部材21の両側辺部における前記歪みセンサ22A,22Bの配置部に対応する2箇所の位置にそれぞれ形成されている。これにより、歪みセンサ22A,22Bは歪み発生部材21の切欠き部21b周辺における長手方向の歪みを検出する。なお、歪み発生部材21は、固定側部材である外方部材1に作用する外力、またはタイヤと路面間に作用する作用力として、想定される最大の力が印加された状態においても、塑性変形しないものとするのが望ましい。塑性変形が生じると、外方部材1の変形がセンサユニット20A,20Bに伝わらず、歪みの測定に影響を及ぼすからである。
前記センサユニット20A,20Bは、その歪み発生部材21の3つの接触固定部21aが、外方部材1の軸方向に同寸法の位置で、かつ各接触固定部21aが互いに円周方向に離れた位置に来るように配置され、これら接触固定部21aがそれぞれスペーサ23を介してボルト24により外方部材1の外径面に固定される。前記各ボルト24は、それぞれ接触固定部21aに設けられた径方向に貫通するボルト挿通孔25からスペーサ23のボルト挿通孔26に挿通し、外方部材1の外周部に設けられたねじ孔27に螺合させる。
このように、スペーサ23を介して外方部材1の外径面に接触固定部21aを固定することにより、薄板状である歪み発生部材21における切欠き部21bを有する各部位が外方部材1の外径面から離れた状態となり、切欠き部21bの周辺の歪み変形が容易となる。接触固定部21aが配置される軸方向位置として、ここでは外方部材1のアウトボード側列の転走面3の周辺となる軸方向位置が選ばれる。ここでいうアウトボード側列の転走面3の周辺とは、インボード側列およびアウトボード側列の転走面3の中間位置からアウトボード側列の転走面3の形成部までの範囲である。外方部材1の外径面へセンサユニット20A,20Bを安定良く固定する上で、外方部材1の外径面における前記スペーサ23が接触固定される箇所には平坦部1bが形成される。
このほか、図5に縦断面図で示すように、外方部材1の外径面における前記歪み発生部材21の3つの接触固定部21aが固定される3箇所の各中間部に溝1cを設けることで、前記スペーサ23を省略し、歪み発生部材21における切欠き部21bが位置する各部位を外方部材1の外径面から離すようにしても良い。
歪みセンサ22A,22Bとしては、種々のものを使用することができる。例えば、歪みセンサ22A,22Bを金属箔ストレインゲージで構成することができる。その場合、通常、歪み発生部材21に対しては接着による固定が行なわれる。また、歪みセンサ22A,22Bを歪み発生部材21上に厚膜抵抗体にて形成することもできる。
センサユニット20A(20B)の2つの歪みセンサ22A,22Bは、図1に示すように、平均値演算部28と振幅値演算部29とに接続される。図7に示すように、平均値演算部28は加算器からなり、2つの歪みセンサ22A,22Bの出力信号の和を演算して、その和を平均値Aとして取り出す。振幅値演算部29は減算器からなり、2つの歪みセンサ22A,22Bの出力信号の差分を演算して、その差分値を振幅値Bとして取り出す。なお、平均値Aとしては、センサ出力信号の和を演算するほか、センサ出力信号の時間平均値を取り出すようにしても良い。
前記平均値演算部28および振幅値演算部29は推定手段30に接続される。推定手段30は、各センサユニット20A,20Bのセンサ出力信号から演算される前記平均値Aおよび振幅値Bから、車輪用軸受や車輪と路面間(タイヤ接地面)に作用する力(例えば垂直方向荷重Fz)を演算・推定する手段である。この推定手段30は、前記歪みセンサ22A,22Bの出力信号の平均値Aを用いて車輪用軸受に作用する荷重値LAを演算・推定する演算処理部としての第1の荷重推定手段31と、前記歪みセンサ22A,22Bの出力信号の平均値Aと振幅値Bとを用いて車輪用軸受に作用する荷重値LBを演算・推定する演算処理部としての第2の荷重推定手段32とを有する。つまり、第1および第2の演算推定手段31,32はそれぞれ、第1および第2の荷重値LA,LBを演算結果として出力する。
車輪用軸受に作用する荷重Lと歪みセンサ22A,22Bの出力信号Sとの関係は、線形な範囲内でオフセット分を除外すれば、
L=M1×S ……(1)
という関係で表すことができ、この関係式(1)から車輪用軸受や車輪と路面間(タイヤ接地面)に作用する荷重Lを推定することができる。ここで、M1は所定の補正係数である。
L=M1×S ……(1)
という関係で表すことができ、この関係式(1)から車輪用軸受や車輪と路面間(タイヤ接地面)に作用する荷重Lを推定することができる。ここで、M1は所定の補正係数である。
前記第1の荷重推定手段31では、歪みセンサ22A,22Bの出力信号からオフセット分を除いた変数として前記平均値Aを用い、この変数に所定の補正係数M1を乗算した一次式、つまり
LA=M1×A ……(2)
から第1の荷重値(演算結果)LAを演算・推定する。このようにオフセット分を除外した変数を用いることにより、荷重推定精度を向上させることができる。
LA=M1×A ……(2)
から第1の荷重値(演算結果)LAを演算・推定する。このようにオフセット分を除外した変数を用いることにより、荷重推定精度を向上させることができる。
なお、この例では、2つのセンサユニット20A,20Bが用いられているので、式(2)による演算では各センサユニット20A(20B)から求められる平均値Aが用いられる。すなわち、センサユニット20Aから求められる平均値をAA、センサユニット20Bから求められる平均値をABとすると、式(2)は
LA=M1A×AA+M1B×AB ……(2’)
として表される。ただし、M1Aは平均値AAに乗算する所定の補正係数、M1Bは平均値ABに乗算する所定の補正係数である。
LA=M1A×AA+M1B×AB ……(2’)
として表される。ただし、M1Aは平均値AAに乗算する所定の補正係数、M1Bは平均値ABに乗算する所定の補正係数である。
前記第2の荷重推定手段32では、前記平均値Aおよび振幅値Bを変数として用い、これらの変数に所定の補正係数M2,M3を乗算した一次式、つまり
LB=M2×A+M3×B ……(3)
から第2の荷重値(演算結果)LBを演算・推定する。このように2種類の変数を用いることで、荷重推定精度をさらに向上させることができる。
LB=M2×A+M3×B ……(3)
から第2の荷重値(演算結果)LBを演算・推定する。このように2種類の変数を用いることで、荷重推定精度をさらに向上させることができる。
この例では、2つのセンサユニット20A,20Bが用いられているので、センサユニット20Aから求められる平均値をAA、振幅値をBA、センサユニット20Bから求められる平均値をAB、振幅値をBBとすると、式(3)は
LB=M2A×AA+M2B×AB+M3A×BA+M3B×BB ……(3’)
として表される。ただし、M2Aは平均値AAに乗算する所定の補正係数、M2Bは平均値ABに乗算する所定の補正係数、M3Aは振幅値BAに乗算する所定の補正係数、M3Bは振幅値BBに乗算する所定の補正係数である。上記各演算式における各補正係数の値は、予め試験やシミュレーションで求めておいて設定する。前記第1の荷重推定手段31および第2の荷重推定手段32による演算は並行して行なわれる。
LB=M2A×AA+M2B×AB+M3A×BA+M3B×BB ……(3’)
として表される。ただし、M2Aは平均値AAに乗算する所定の補正係数、M2Bは平均値ABに乗算する所定の補正係数、M3Aは振幅値BAに乗算する所定の補正係数、M3Bは振幅値BBに乗算する所定の補正係数である。上記各演算式における各補正係数の値は、予め試験やシミュレーションで求めておいて設定する。前記第1の荷重推定手段31および第2の荷重推定手段32による演算は並行して行なわれる。
センサユニット20A(20B)は、外方部材1のアウトボード側列の転走面3の周辺となる軸方向位置に設けられるので、歪みセンサ22A,22Bの出力信号a,bは、図6のようにセンサユニット20A(20B)の設置部の近傍を通過する転動体5の影響を受ける。つまり、この転動体5の影響が上記したオフセット分として作用する。
また、軸受の停止時においても、歪みセンサ22A,22Bの出力信号a,bは、転動体5の位置の影響を受ける。すなわち、転動体5がセンサユニット20A(20B)における歪みセンサ22A,22Bに最も近い位置を通過するとき(または、その位置に転動体5があるとき)、歪みセンサ22A,22Bの出力信号a,bの振幅は最大値となり、図6のように転動体5がその位置から遠ざかるにつれて(または、その位置から離れた位置に転動体5があるとき)低下する。
軸受回転時には、転動体5は所定の配列ピッチPで前記センサユニット20A(20B)の設置部の近傍を順次通過するので、歪みセンサ22A,22Bの出力信号a,bは、転動体5の配列ピッチPを周期として図6に実線で示すように周期的に変化する正弦波に近い波形となる。また、歪みセンサ22A,22Bの出力信号a,bは、温度の影響やナックル16と車体取付用フランジ1a(図1)の面間などの滑りによるヒステリシスの影響を受ける。
この実施形態では、前記2つの歪みセンサ22A,22Bの出力信号a,bの和を上記した平均値Aとし、出力信号a,bの差分から絶対値|a-b|を求めて時間平均したもの、または出力信号a,bの差分からRMS値(二乗平均値)を求めたものを、上記した振幅値Bとする。これにより、平均値Aは転動体5の通過による変動成分をキャンセルした値となる。また、振幅値Bは、2つの歪みセンサ22A,22Bの各出力信号a,bに現れる温度の影響やナックル・フランジ面間などの滑りの影響を相殺した値となる。したがって、この平均値Aと振幅値Bを用いることにより、車輪用軸受やタイヤ接地面に作用する荷重を正確に検出することができる。
センサユニット20A(20B)として、図5の構成例のものを示す図6においては、固定側部材である外方部材1の外径面の円周方向に並ぶ3つの接触固定部21aのうち、その配列の両端に位置する2つの接触固定部21aの間隔を、転動体5の配列ピッチPと同一に設定している。この場合、隣り合う接触固定部21aの中間位置にそれぞれ配置される2つの歪みセンサ22A,22Bの間での前記円周方向の間隔は、転動体5の配列ピッチPの略1/2となる。その結果、2つの歪みセンサ22A,22Bの出力信号a,bは略180度の位相差を有することになり、その和として求められる平均値Aは転動体5の通過による変動成分をキャンセルしたものとなる。また、その差分として求められる振幅値Bは温度の影響やナックル・フランジ面間などの滑りの影響を相殺した値となる。
なお、図6では、接触固定部21aの間隔を、転動体5の配列ピッチPと同一に設定し、隣り合う接触固定部21aの中間位置に各1つの歪みセンサ22A,22Bをそれぞれ配置することで、2つの歪みセンサ22A,22Bの間での前記円周方向の間隔を、転動体5の配列ピッチPの略1/2となるようにした。これとは別に、直接、2つの歪みセンサ22A,22Bの間での前記円周方向の間隔を、転動体5の配列ピッチPの1/2に設定しても良い。
この場合に、2つの歪みセンサ22A,22Bの前記円周方向の間隔を、転動体5の配列ピッチPの{1/2+n(n:整数)}倍、またはこれらの値に近似した値としても良い。この場合にも、両歪みセンサ22A,22Bの出力信号a,bの和として求められる平均値Aは転動体5の通過による変動成分をキャンセルした値となり、差分として求められる振幅値Bは温度の影響やナックル・フランジ面間などの滑りの影響を相殺した値となる。
図8のように、前記推定手段30は次段の推定荷重出力手段33に接続される。この推定荷重出力手段33は、前記第1および第2の荷重推定手段31,32が出力する演算結果LA,LBを、車輪回転速度に応じた比率r(0~1の値)で次式(4)のように合成して最終の推定荷重値Loutを出力するものである。
Lout=rLA+(1-r)LB ……(4)
Lout=rLA+(1-r)LB ……(4)
この場合の合成比率rは、車輪回転速度に対応して合成比率テーブル34から読み出される。合成比率テーブル34においてマップ化される車輪用回転速度と合成比率rとの関係は、例えば図9のように設定される。すなわち、静止時には合成比率rは1、通常走行時には1以下の値とされ、高速走行時には再び増加する傾向となるように設定される。これにより、静止状態あるいは極低速状態では平均値Aのみによる第1の荷重値LAが出力され、走行状態になり振幅値Bが安定して得られるようになったところで徐々に第2の荷重値LBとの合成出力に切り替わる。合成比率テーブル34に設定される合成比率rは、外部からパラメータで変更可能とされる。なお、ここで言う「マップ化されて」とは、車輪回転速度に対応して合成比率rが定められていることを言う。また、「外部から」とは、合成比率テーブル34や、推定荷重出力手段33以外からを言う。
なお、推定手段30で得られる第1および第2の荷重値LA,LBについては、平均値Aと振幅値Bの両方を用いて推定・演算する第2の荷重推定手段32による演算結果LBのほうが精度が高くなるという特性がある。したがって、遅延時間よりも精度を優先する場合には、前記合成比率rをLB側が高くなるように設定するのが望ましい。逆に、遅延時間をできるだけ小さくすることが要求される場合には、LAの比率が高くなるように合成比率rを設定するのが望ましい。このほか、積極的に合成比率rを制御して、所望の特定の推定荷重出力が得られるように構成しても良い。
ここでは、上記したように車輪回転数が高速となる側でLAの比率を上げるように合成比率rを設定したが、それは次の理由による。センサ出力信号の前処理部である前記平均値演算部28や振幅値演算部29において、センサ出力信号をAD変換によってデジタル数値化してサンプリングする処理回路を構成した場合に発生する問題がある。転動体5の公転運動によって図6のように発生するセンサ出力信号の振動周波数が、車両の走行速度に比例して変化するため、高速走行時にはAD変換のサンプリングレートに近い周波数に達することがある。この場合、サンプリングデータに現れるエイリアシングにより、振幅値演算部29では正確な振幅値Bが得られなくなってしまう。エイリアシングを低減するめには、図10のようにAD変換回路39の信号入力側にLPF38を設けるが、その結果、高速走行時に検出される振幅値Bは、LPF38の影響を受けて小さく検出されることになり、この値を用いた第2の荷重推定手段32での荷重推定の誤差が増加してしまう。なお、図11には、LPF38の周波数特性を示す。
図9に示した合成比率rの設定例では、約90km/hの走行速度より高速側では、演算結果の合成比率rを大きくしていき、平均値Aのみを用いた第1の荷重推定手段31による第1の荷重値LAの比率を高めている。そのため、高速側で振幅値演算の誤差が発生してきた場合でも、その影響が小さくなり、荷重の推定誤差の増加を抑えることができる。また、第1の荷重値LA側の比率を高めることで検出遅延時間が小さくなるため、車速が高い場合にはより高速な荷重検出応答が得られることになる。これらは、車両の安定性を制御する様々な制御プログラムにとっても有利な特性となるため、より車両の安全性、安定性を高める効果が得られる。
前記推定荷重出力手段33には、例えば外部から車輪回転速度の情報が入力され、この情報に基づいて前記合成比率rが決められる。「外部から」とは、推定荷重出力手段33やその前段の各演算部28,29、推定手段30、以外からを言う。この場合、外部からの車輪回転速度の情報として、車輪用軸受に設置された回転速度検出センサ(図示せず)の出力信号を直接入力しても良いし、車体側のECUから車輪回転速度の情報を受けるものとしても良い。また、車輪回転速度の情報として、前記歪みセンサ22A,22Bの出力信号a,bから転動体5の通過周波数を検出して、車輪回転速度を推定するものとしても良い。
また、前記推定荷重出力手段33とは別個に、図8のように第1および第2の荷重推定手段31,32で演算された第1および第2の荷重値LA,LBを別々に出力する第2の推定荷重出力手段35を設け、これらの演算結果を車体側のECUが走行状態に応じて合成する処理を行うようにしても良い。この場合、車両の走行状態に関するより多くの情報に基づいて判断することが可能になるので、上記した合成比率rを制御して、最適な推定荷重値を出力することが容易になる。
この実施形態では、固定側部材である外方部材1の外径面の上下位置に2つのセンサユニット20A,20Bを配置しているので、車輪用軸受に作用する垂直方向荷重Fzを精度良く推定できる。配置するセンサユニット20の個数を増やせば、さらに駆動力や制動力となる荷重Fx、軸方向荷重Fyも推定することができる。
また、図7のように、センサユニット20A,20Bに温度センサ36を取付け、この温度センサ36の検出信号により前記センサ出力信号の平均値Aを補正する温度補正手段37を設けても良い。軸受回転による発熱や周辺環境などにより車輪用軸受の温度が変化すると、荷重が変化しなくても、センサユニット20A,20Bのセンサ出力信号は熱膨張などにより変動するので、検出された荷重に温度の影響が残る。そこで、車輪用軸受の温度またはその周辺温度に応じてセンサ出力信号の平均値Aを補正する温度補正手段37を設けると、温度による検出荷重誤差を低減することができる。
図8に示す推定手段30には、軸方向荷重Fyを演算するときに、軸方向荷重Fyの方向を判別するFy方向判別部40が設けられる。上記したように、車輪用軸受の回転中には、センサユニット20A,20Bのセンサ出力信号の振幅には、正弦波に近い周期的な変化が生じるが、その振幅値は軸方向荷重(モーメント力)Fyの大きさによって変化する。
図12(A)は外方部材1の外径面の上面部に配置されたセンサユニット20Aのセンサ出力を示し、図12(B)は外方部材1の外径面の下面部に配置されたセンサユニット20Bのセンサ出力を示している。これらの図において、横軸は軸方向荷重Fyを表し、縦軸は外方部材1の歪み量つまりセンサ出力信号を表し、最大値および最小値は振動する信号の最大値および最小値を表す。これらの図から、軸方向荷重Fyが+方向の場合、個々の転動体5の荷重は外方部材1の外径面上面部で小さくなり(つまり出力信号の最大値と最小値の差が小さくなる)、外方部材1の外径面下面部で大きくなる(つまり出力信号の最大値と最小値の差が大きくなる)ことが分かる。これに対して、軸方向荷重Fyが-方向の場合には逆に、個々の転動体5の荷重は外方部材1の外径面上面部で大きくなり、外方部材1の外径面下面部で小さくなることが分かる。図13は、これら上下のセンサユニット20A,20Bのセンサ出力信号の振幅の差分と軸方向荷重Fyの方向の関係をグラフで示している。
そこで、Fy方向判別部40では、外方部材1の外径面上面部および外径面下面部に配置されたセンサユニット20A,20Bのセンサ出力信号の振幅の上記差分を求め、これらの値を比較することで、軸方向荷重Fyの方向を判別する。すなわち、外方部材1の外径面上面部のセンサユニット20Aのセンサ出力信号の振幅の差分が小さく、外方部材の外径面下面部のセンサユニット20Bのセンサ出力信号の振幅の差分が大きいとき、Fy方向判別部40では、軸方向荷重Fyの方向が+方向であると判別する。逆に、外方部材1の外径面上面部のセンサユニット20Aのセンサ出力信号の振幅の差分が大きく、外方部材1の外径面下面部のセンサユニット20Bのセンサ出力信号の振幅の差分が小さいとき、Fy方向判別部33では、軸方向荷重Fyの方向が-方向であると判別する。これに対応して、推定手段30では、第1および第2の荷重推定手段31,32で軸方向荷重Fyの演算が行われるときに、前記Fy方向判別部40の判別結果を反映させて演算推定式のパラメータの正負を反転させるなどの処理を施す。
車輪のタイヤと路面間に荷重が作用すると、車輪用軸受の固定側部材である外方部材1にも荷重が印加されて変形が生じる。ここではセンサユニット20A(20B)における歪み発生部材21の3つ以上の接触固定部21aが、外方部材1に接触固定されているので、外方部材1の歪みが歪み発生部材21に拡大して伝達され易く、その歪みが歪みセンサ22A,22Bで感度良く検出され、その出力信号に生じるヒステリシスも小さくなる。
特に、センサユニット20A(20B)の歪みセンサ22A,22Bの出力信号の平均値Aを用いて車輪用軸受に作用する荷重を演算・推定する第1の荷重推定手段31と、センサ出力信号の振幅値Bと前記平均値Aとを用いて車輪用軸受に作用する荷重を演算・推定する第2の荷重推定手段32とを設け、これら両荷重推定手段31,32が出力する演算結果を車輪回転速度に応じた比率rで合成して推定荷重値を出力する推定荷重出力手段33を設けているので、以下に列挙するような効果が得られる。
・荷重推定演算処理による検出時間遅れを最小限に抑えることができ、得られた荷重情報を利用した制御が容易になる。
・従来例(特許文献3)のように荷重推定処理を切り替える方法では、推定荷重出力の遅れ時間も急激に変化するため、結果として検出誤差となって観測されてしまうが、このセンサ付車輪用軸受では連続的に変化する合成比率rで前記した2つの演算結果を合成するため、得られる推定荷重値に不連続変化がなくなり、各種の車両制御への推定荷重値の利用が容易となる。
・また、静止状態あるいは極低速状態では前記平均値Aのみによる第1の荷重値LAが出力されるようにできるため、車両が静止した状態であっても、タイヤと路面間に作用する荷重状態を検出できる。
・また、合成比率rを用いて前記した2つの演算結果を合成するので、この合成比率rの値を制御して、所望の特定の推定荷重値が得られるように構成することができる。
・高速走行時には、センサ出力信号の振動周波数はAD変換のサンプリングレートに近い値に達することがあるが、合成比率rを用いて前記した2つの演算結果を合成するので、高速走行時に前記振幅値Bの誤差が発生してきた場合でも、前記平均値Aのみを用いて演算される第1の荷重値LAの比率を高めることで振幅値Bの誤差の影響を小さくでき、荷重の検出精度を高めることができる。
・従来例(特許文献3)のように荷重推定処理を切り替える方法では、推定荷重出力の遅れ時間も急激に変化するため、結果として検出誤差となって観測されてしまうが、このセンサ付車輪用軸受では連続的に変化する合成比率rで前記した2つの演算結果を合成するため、得られる推定荷重値に不連続変化がなくなり、各種の車両制御への推定荷重値の利用が容易となる。
・また、静止状態あるいは極低速状態では前記平均値Aのみによる第1の荷重値LAが出力されるようにできるため、車両が静止した状態であっても、タイヤと路面間に作用する荷重状態を検出できる。
・また、合成比率rを用いて前記した2つの演算結果を合成するので、この合成比率rの値を制御して、所望の特定の推定荷重値が得られるように構成することができる。
・高速走行時には、センサ出力信号の振動周波数はAD変換のサンプリングレートに近い値に達することがあるが、合成比率rを用いて前記した2つの演算結果を合成するので、高速走行時に前記振幅値Bの誤差が発生してきた場合でも、前記平均値Aのみを用いて演算される第1の荷重値LAの比率を高めることで振幅値Bの誤差の影響を小さくでき、荷重の検出精度を高めることができる。
以上の結果から、センサ22A,22Bの非線形特性を補正して荷重推定誤差を低減させつつ、様々な入力荷重状態に応じて連続的な推定荷重値を演算し、できるだけ小さな検出時間遅れで推定荷重値を出力できる。
図14は、タイヤ接地面に対して上下位置および左右位置となる、前記固定側部材である外方部材1の外径面の上面部、下面部、右面部、および左面部に、円周方向90度の位相差で4つのセンサユニット20A,20B,20C,20Dを等配した第2実施形態のアウトボード側から見た正面図を示す。センサユニット20A~20Dの配置構成を除くその他の構成は、先の実施形態の場合と同様である。このように4つのセンサユニット20A~20Dを配置することで、車輪用軸受に作用する垂直方向荷重Fz、駆動力や制動力となる荷重Fx、軸方向荷重Fyを推定することができる。
この発明の第3実施形態を図15ないし図19と共に説明する。以下の実施形態の説明においては、先行する実施形態で説明している事項に対応している部分には同一の符号を付し、重複する説明を略する。構成の一部のみを説明している場合、構成の他の部分は、先行して説明している実施形態と同様とする。同一の構成部分からは同一の作用効果を奏する。各実施形態で具体的に説明している部分の組合せばかりではなく、特に組合せに支障が生じなければ、実施形態同士を部分的に組合せることも可能である。
この第3実施形態にかかるセンサ付車輪用軸受は、回転センサの信号や車両からの車輪回転速度情報を用いずに、荷重推定演算処理を行い、正確な推定荷重値が得られるようにしている。この実施形態では、図15に示すように、平均値演算部28と振幅値演算部29を信号前処理手段42としており、この信号前処理手段42が推定手段30に接続される。
前記信号前処理手段42は、図15のように回転速度評価手段36にも接続される。回転速度評価手段36は、前記信号前処理手段42において各歪みセンサ22A,22Bの出力信号a,bから求められた平均値Aおよび振幅値Bを利用することで、車輪の回転速度を判別する指標となる評価値Vを求める手段である。
図17のように、前記推定手段30は次段の推定荷重出力手段33Aに接続される。この推定荷重出力手段33Aは、前記推定手段30の2つの荷重推定手段31,32での演算結果(荷重値)LA,LBを合成して最終の推定荷重値Loutを出力するものである。この場合の2つの演算結果LA,LBの合成は、前記回転速度評価手段36で求められる評価値Vが予め定めたしきい値Vthを横切ってからの経過時間tに応じた比率r(t)で行われる。しきい値Vthはメモリ41から読み出される。
次に、このセンサ付車輪用軸受における前記検出系での作用を説明する。まず、信号前処理手段42において、各歪みセンサ22A,22Bの出力信号Sから平均値Aおよび振幅値Bを求め、それらを利用して回転速度を判別するための評価値Vを回転速度評価手段36で算出する。回転速度評価手段36では、算出した評価値Vをさらに別途定めたしきい値Vthと比較することにより、現在の状態が推定手段30での第1の演算結果LAを用いる回転速度領域RAにあるか、または第2の演算結果LBを用いる回転速度領域RBにあるか、を判断する。
ここで、回転速度を判別するための評価値Vとしては、例えば、一定時間内に入力された各歪みセンサ22A,22Bの出力信号の振幅値Bを選択して合計した値を用いるものとする。この場合、全ての出力信号の振幅値Bを合計しても良いし、一部のセンサ出力信号の振幅値Bを選択して合計したものでも良い。また、別の方法としては、各歪みセンサ22A,22Bの出力信号から基本周波数成分を抽出して、回転速度を推定するものとしても良い。この評価値Vは、回転速度に正確に比例する関係になくても良く、回転速度の判別に必要な低速の回転速度領域において、ある一定速度を超えているかどうかを判断できれば良い。これにより、評価値Vに必要な精度が低くて済むため、正確な回転速度を出力する回転センサを設けたり、外部のセンサ情報を入力するための手段を設けたりする必要がなく、構成を単純化することができる。
推定手段30では、歪みセンサ22A,22Bの出力信号の平均値A(転動体5の配列ピッチPの1/2だけずれた位置に配置した2つの歪みセンサ22A,22Bの出力信号の和Sum)のみを用いた第1の演算処理部35での第1の演算結果LAと、平均値A(平均値はSumでも良いし、時間平均値Avでも良い)と振幅値Bを用いた第2の演算処理部36での第2の演算結果LBとを、並列して算出する。そして、上記の回転速度を判別するための評価値Vに応じて、推定荷重値Loutとしてどちらの演算結果を用いるかを選択して出力する。走行中に評価値Vが変化し、回転速度領域RAと回転速度領域RBの境界を越えた場合、通過後の時間に応じて重み付けした2つの計算結果を合成して出力する。すなわち、比率r(t)により演算結果LAと演算結果LBを合成し、最終の推定荷重値Loutを出力する。なお、領域RAは低速の回転速度領域、領域RBは通常の速度の回転速度領域であり、図18は評価値Vと回転速度領域RA,RBとの関係を示す。
図19は、推定荷重出力手段33Aでの推定荷重値Loutの算出例を示す。例えば、回転速度が領域RAから領域RBに入った場合、境界通過後の時間をtとして、推定荷重出力手段33Aでは前記合成を以下のように計算する。
Lout=(1-r(t))×LA+r(t)×LB;(r(t)は0~1の値)……(4)
ここで、比率r(t)は、例えば、線形関数を用いて
r(t)= t / a ( 0 < t < a)……(5)
としても良いし、三角関数を用いて
r(t)=sin(πt / 2a) ^2 ( 0 < t < a)……(6)
などとしても良い。2次以上の関数を用いた場合、切り替え部分を滑らかに接続することができる。いずれも、t=0からt=aにかけて0から1に変化する関数とする。この演算の結果、境界通過後の経過時間t=aまでは第1の演算結果LAと第2の演算結果LBを合成した推定荷重値Loutが出力され、それ以降は回転速度領域RBの計算結果が出力されることになる。なお、境界通過後の経過時間のうち、予め設定された時間a(以下、遷移時間と呼ぶ)は、前記しきい値Vthとともに、図17におけるメモリ41に予め書き込まれている。また、境界通過後の経過時間tは、回転速度評価手段36に設けられるタイマ43で計測される。
Lout=(1-r(t))×LA+r(t)×LB;(r(t)は0~1の値)……(4)
ここで、比率r(t)は、例えば、線形関数を用いて
r(t)= t / a ( 0 < t < a)……(5)
としても良いし、三角関数を用いて
r(t)=sin(πt / 2a) ^2 ( 0 < t < a)……(6)
などとしても良い。2次以上の関数を用いた場合、切り替え部分を滑らかに接続することができる。いずれも、t=0からt=aにかけて0から1に変化する関数とする。この演算の結果、境界通過後の経過時間t=aまでは第1の演算結果LAと第2の演算結果LBを合成した推定荷重値Loutが出力され、それ以降は回転速度領域RBの計算結果が出力されることになる。なお、境界通過後の経過時間のうち、予め設定された時間a(以下、遷移時間と呼ぶ)は、前記しきい値Vthとともに、図17におけるメモリ41に予め書き込まれている。また、境界通過後の経過時間tは、回転速度評価手段36に設けられるタイマ43で計測される。
逆に、回転速度が領域RBから領域RAに入った場合、境界通過後の時間をtとして、推定荷重出力手段33Aでは前記合成を以下のように計算する。
Lout=(1-r(a-t))×LA+r(a-t)×LB……(7)
また、回転速度が領域RAから領域RBに入った後、時間tがaに到達しない状態(t=t1)で再び領域RBに戻った場合には、
t=a-t1
での合成比率r(t)を初期値として演算処理を継続する。
Lout=(1-r(a-t))×LA+r(a-t)×LB……(7)
また、回転速度が領域RAから領域RBに入った後、時間tがaに到達しない状態(t=t1)で再び領域RBに戻った場合には、
t=a-t1
での合成比率r(t)を初期値として演算処理を継続する。
なお、推定手段30の演算処理に用いる平均値Aおよび振幅値Bの信号前処理手段42での算出において、処理対象時間Tの大きさを、評価値Vの値に応じて変化させる構成としても良い。車輪の回転速度が低い状態では処理対象時間Tを長めに設定し、回転速度が速くなると処理対象時間Tが短くなるように構成すると、推定手段30での振幅値Bを用いた演算処理が低速領域で精度劣化するのを抑えつつ、より高速な応答が求められる速度領域では演算結果の応答時間を短くすることができる。評価値Vと回転速度との相関が低い場合でも、評価値Vの値に応じたマップを作成しておくことで、処理対象時間Tを回転速度領域に応じて最適に選択することが可能となる。
特に、センサユニット20A(20B)の歪みセンサ22A,22Bの出力信号の平均値Aのみを用いて車輪用軸受に作用する荷重を演算・推定する第1の荷重推定手段31、およびセンサ出力信号の振幅値Bと前記平均値Aとを用いて車輪用軸受に作用する荷重を演算・推定する第2の荷重推定手段32からなる推定手段30と、前記各歪みセンサ22A,22Bの出力信号から車輪の回転速度を表す評価値Vを求める回転速度評価手段36と、前記評価値Vに基づき前記推定手段30における2つの荷重推定手段31,32の演算結果を合成して推定荷重値を出力する推定荷重出力手段33Aとを設け、この推定荷重出力手段33Aは、前記評価値Vが予め定めたしきい値Vthを横切ってからの経過時間に応じた比率rで前記演算結果の合成を行うようにしているので、以下に列挙するような効果が得られる。
・回転センサの信号や、車両からの車輪回転速度情報を用いることなく、荷重推定演算処理を行うことができるため、信号配線本数の増加が必要なく、荷重センサの製造コストを抑えられるとともに、車両に搭載するときの自由度を高めることができる。
・通常の回転状態における荷重推定演算処理と、低速時の荷重推定演算処理とを切り替えることにより、荷重推定誤差が抑制されるため、より正確な推定荷重を得ることができる。
・回転速度に応じて荷重推定演算処理を切り替えるときにも、連続的に合成比率が変化する方法により荷重信号の不連続変化がなくなり、各種の車両制御への荷重信号の利用が容易になる。
・走行中に急ブレーキを動作させた場合には、急激に回転速度が変化してスリップ状態となることもあるが、車輪の回転が静止状態あるいは極低速状態であっても推定荷重値が出力されるため、走行状態に依存することなく車両制御等に信号を利用することができる。
・通常の回転状態における荷重推定演算処理と、低速時の荷重推定演算処理とを切り替えることにより、荷重推定誤差が抑制されるため、より正確な推定荷重を得ることができる。
・回転速度に応じて荷重推定演算処理を切り替えるときにも、連続的に合成比率が変化する方法により荷重信号の不連続変化がなくなり、各種の車両制御への荷重信号の利用が容易になる。
・走行中に急ブレーキを動作させた場合には、急激に回転速度が変化してスリップ状態となることもあるが、車輪の回転が静止状態あるいは極低速状態であっても推定荷重値が出力されるため、走行状態に依存することなく車両制御等に信号を利用することができる。
なお、上記した各実施形態では、外方部材1が固定側部材である場合につき説明したが、この発明は、内方部材が固定側部材である車輪用軸受にも適用することができ、その場合、センサユニット20は内方部材の内周となる周面に設ける。また、これらの実施形態では第3世代型の車輪用軸受に適用した場合につき説明したが、この発明は、軸受部分とハブとが互いに独立した部品となる第1または第2世代型の車輪用軸受や、内方部材の一部が等速ジョイントの外輪で構成される第4世代型の車輪用軸受にも適用することができる。また、このセンサ付車輪用軸受は、従動輪用の車輪用軸受にも適用でき、さらに各世代形式のテーパころタイプの車輪用軸受にも適用することができる。
以上のとおり、図面を参照しながら好適な実施形態を説明したが、当業者であれば、本件明細書を見て、自明な範囲内で種々の変更および修正を容易に想定するであろう。したがって、そのような変更および修正は、請求の範囲から定まる発明の範囲内のものと解釈される。
1…外方部材
2…内方部材
3,4…転走面
5…転動体
19…温度センサ
20A~20D…センサユニット
21…歪み発生部材
21a…接触固定部
22A,22B…歪みセンサ
28…平均値演算部
29…振幅値演算部
30…推定手段
31…第1の荷重推定手段
32…第2の荷重推定手段
33,33A…推定荷重出力手段
34…合成比率テーブル
35…第2の推定荷重出力手段
37…温度補正手段
38…信号前処理手段
2…内方部材
3,4…転走面
5…転動体
19…温度センサ
20A~20D…センサユニット
21…歪み発生部材
21a…接触固定部
22A,22B…歪みセンサ
28…平均値演算部
29…振幅値演算部
30…推定手段
31…第1の荷重推定手段
32…第2の荷重推定手段
33,33A…推定荷重出力手段
34…合成比率テーブル
35…第2の推定荷重出力手段
37…温度補正手段
38…信号前処理手段
Claims (21)
- 複列の転走面が内周に形成された外方部材と、前記転走面と対向する転走面が外周に形成された内方部材と、両部材の対向する転走面間に介在した複列の転動体とを備え、車体に対して車輪を回転自在に支持する車輪用軸受であって、
上記外方部材および内方部材のうちの固定側部材に、この固定側部材に接触して固定される3つ以上の接触固定部を有する歪み発生部材、およびこの歪み発生部材に取付けられてこの歪み発生部材の歪みを検出する2つ以上のセンサからなる荷重検出用センサユニットを設け、
前記各センサの出力信号の平均値を用いて車輪用軸受に作用する荷重を演算・推定する第1の荷重推定手段と、前記センサの出力信号の平均値と振幅値とを用いて車輪用軸受に作用する荷重を演算・推定する第2の荷重推定手段と、これらの荷重推定手段が出力する演算結果を車輪回転速度に応じた比率で合成して推定荷重値を出力する推定荷重出力手段とを設けたセンサ付車輪用軸受。 - 請求項1において、前記センサユニットでは、隣り合う第1および第2の接触固定部の間、および隣り合う第2および第3の接触固定部の間に各センサをそれぞれ取付け、隣り合う接触固定部もしくは隣り合うセンサの前記固定部材の円周方向についての間隔を、転動体の配列ピッチの{1/2+n(n:整数)}倍とし、前記第1および第2の荷重推定手段は前記2つのセンサの出力信号の和を平均値として用いるものとしたセンサ付車輪用軸受。
- 請求項1において、前記推定荷重出力手段で用いる合成比率rが、車輪停止状態から車輪回転速度が低速状態の間で、r=1と設定されているセンサ付車輪用軸受。
- 請求項1において、前記推定荷重出力手段で用いる合成比率が、車輪回転速度が通常速度の状態から高速状態になるにつれて高くなるように設定されているセンサ付車輪用軸受。
- 請求項1において、前記推定荷重出力手段で用いられる合成比率が、車輪回転速度に対応してマップ化されており、外部からパラメータで変更可能にされているセンサ付車輪用軸受。
- 請求項1において、前記推定荷重出力手段は、車輪用軸受に設置された車輪回転速度検出センサの出力信号を直接入力して車輪回転速度を検出するものとしたセンサ付車輪用軸受。
- 請求項1において、前記推定荷重出力手段は、車体側のECUから車輪回転速度の情報を受けるものとしたセンサ付車輪用軸受。
- 請求項1において、前記推定荷重出力手段は、前記センサの出力信号に含まれる転動体の公転運動による振幅成分の周波数から車輪回転速度を検出するものとしたセンサ付車輪用軸受。
- 請求項1において、前記センサユニットを3つ以上設け、前記第1および第2の荷重推定手段は、前記3つ以上のセンサユニットのセンサの出力信号から車輪用軸受の径方向に作用する径方向荷重Fx,Fzおよび車輪用軸受の軸方向に作用する軸方向荷重Fyを演算・推定するものとしたセンサ付車輪用軸受。
- 請求項1において、前記センサユニットを、タイヤ接地面に対して上下位置および左右位置となる前記固定側部材の外径面の上面部、下面部、右面部、および左面部に円周方向90度の位相差で4つ等配したセンサ付車輪用軸受。
- 請求項1において、前記センサユニットに温度センサを取付け、この温度センサの検出信号により前記センサ出力信号を補正する温度補正手段を設けたセンサ付車輪用軸受。
- 請求項1において、前記推定荷重出力手段とは別に、前記第1の荷重推定手段が演算・推定する推定荷重値と、前記第2の荷重推定手段が演算・推定する推定荷重値を、個別に外部に出力する第2の推定荷重出力手段を設けたセンサ付車輪用軸受。
- 請求項1において、さらに、前記各センサの出力信号から車輪の回転速度を表す評価値Vを求める回転速度評価手段を設け、前記推定荷重出力手段は、前記評価値Vが予め定めたしきい値Vthを横切ってからの経過時間に応じた比率rで前記演算結果の合成を行うセンサ付車輪用軸受。
- 請求項13において、前記荷重推定手段における演算処理に用いる前記各センサの出力信号の平均値と振幅値は、一定時間T内の各センサの出力信号を用いて算出するセンサ付車輪用軸受。
- 請求項13において、前記一定時間Tの値は、前記回転速度評価手段が求める評価値Vに応じて変化させるセンサ付車輪用軸受。
- 請求項13において、前記推定荷重出力手段で用いる合成比率rは、前記評価値Vが予め定めたしきい値Vthを横切ってからの経過時間を変数とする一次関数で決定されるセンサ付車輪用軸受。
- 請求項13において、前記推定荷重出力手段で用いる合成比率rは、前記評価値Vが予め定めたしきい値Vthを横切ってからの経過時間を変数とする二次以上の関数で決定されるセンサ付車輪用軸受。
- 請求項13において、前記推定荷重出力手段で用いる合成比率rの変化は、前記評価値Vが予め定めたしきい値thを横切ってからの経過時間のうち、予め設定された遷移時間aの経過で完了するものとしたセンサ付車輪用軸受。
- 請求項18において、前記評価値Vが予め定めたしきい値Vthを横切ってから再度しきい値Vthを横切るまでの経過時間が、前記遷移時間aに満たない場合、再度しきい値Vthを横切ったときの合成比率rを初期値として、以後の合成比率rが変化するものとしたセンサ付車輪用軸受。
- 請求項13において、前記回転速度評価手段は、各センサの出力信号の振幅値を選択して合計した値を前記評価値Vとして求めるものとしたセンサ付車輪用軸受。
- 請求項13において、前記回転速度評価手段は、前記センサの出力信号に含まれる転動体の公転運動による振幅成分の周波数から前記評価値Vを求めるものとしたセンサ付車輪用軸受。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/883,718 US10066665B2 (en) | 2010-11-15 | 2011-11-09 | Wheel bearing with sensor |
| CN201180054760.5A CN103210291B (zh) | 2010-11-15 | 2011-11-09 | 带有传感器的车轮用轴承 |
| EP11841065.3A EP2642265B1 (en) | 2010-11-15 | 2011-11-09 | Wheel bearing with sensor |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010254416A JP5646291B2 (ja) | 2010-11-15 | 2010-11-15 | センサ付車輪用軸受 |
| JP2010-254416 | 2010-11-15 | ||
| JP2011-161754 | 2011-07-25 | ||
| JP2011161754A JP5731308B2 (ja) | 2011-07-25 | 2011-07-25 | センサ付車輪用軸受 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012066995A1 true WO2012066995A1 (ja) | 2012-05-24 |
Family
ID=46083929
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/075805 WO2012066995A1 (ja) | 2010-11-15 | 2011-11-09 | センサ付車輪用軸受 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10066665B2 (ja) |
| EP (1) | EP2642265B1 (ja) |
| CN (1) | CN103210291B (ja) |
| WO (1) | WO2012066995A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2869049A4 (en) * | 2012-06-27 | 2016-02-24 | Ntn Toyo Bearing Co Ltd | VEHICLE WHEEL BEARING DEVICE HAVING A SENSOR |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9008899B2 (en) * | 2010-05-24 | 2015-04-14 | Ntn Corporation | Wheel bearing with sensor |
| US9011013B2 (en) * | 2011-05-09 | 2015-04-21 | Ntn Corporation | Sensor-equipped wheel bearing |
| US9243976B2 (en) * | 2012-11-15 | 2016-01-26 | Aktiebolaget Skf | Sensor bearing assembly with cover mounted sensor |
| CN107003194B (zh) | 2014-12-16 | 2019-11-08 | 斯凯孚公司 | 用于滚动轴承的载荷确定系统 |
| CN106840488A (zh) * | 2015-12-03 | 2017-06-13 | 恩梯恩(中国)投资有限公司 | 测量载荷传感器单元以及带测量载荷传感器单元的轮毂轴承 |
| DE102016116113A1 (de) * | 2016-08-30 | 2018-03-01 | Thyssenkrupp Ag | Lager und Verfahren zur Verschleißüberwachung und/oder Lastmessung |
| US11495028B2 (en) * | 2018-09-28 | 2022-11-08 | Intel Corporation | Obstacle analyzer, vehicle control system, and methods thereof |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1194661A (ja) * | 1997-09-18 | 1999-04-09 | Nissan Motor Co Ltd | 路面摩擦係数推定装置 |
| JP2003530565A (ja) | 2000-04-10 | 2003-10-14 | ザ テイムケン コンパニー | 荷重を監視するためのセンサを備えたベアリングアセンブリ |
| JP2004237881A (ja) * | 2003-02-06 | 2004-08-26 | Toyota Motor Corp | 路面状態検出装置 |
| JP2004538564A (ja) * | 2001-08-11 | 2004-12-24 | エフ・アー・ゲー・クーゲルフィッシャー・ゲオルク・シェーファー・カー・ゲー・アー・アー | 回転部分の応力の非接触測定 |
| JP2005022602A (ja) * | 2003-07-02 | 2005-01-27 | Honda Motor Co Ltd | 車両のタイヤ情報システム |
| JP2010043901A (ja) | 2008-08-11 | 2010-02-25 | Ntn Corp | センサ付車輪用軸受 |
| JP2010181154A (ja) | 2009-02-03 | 2010-08-19 | Ntn Corp | センサ付車輪用軸受 |
| JP2010230406A (ja) * | 2009-03-26 | 2010-10-14 | Ntn Corp | センサ付車輪用軸受 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001021577A (ja) | 1999-07-12 | 2001-01-26 | Nsk Ltd | 車輪支持用転がり軸受ユニット |
| JP2002308087A (ja) | 2001-04-17 | 2002-10-23 | Toyota Motor Corp | ブレーキ診断装置、および方法 |
| JP2007292233A (ja) | 2006-04-26 | 2007-11-08 | Ntn Corp | センサ付車輪用軸受 |
| JP2008051741A (ja) | 2006-08-28 | 2008-03-06 | Jtekt Corp | センサ付き転がり軸受装置及び転がり軸受用の荷重測定システム |
| JP2008175664A (ja) | 2007-01-18 | 2008-07-31 | Ntn Corp | 車輪用軸受の軸受荷重検出装置 |
| EP2184182B1 (en) * | 2007-07-31 | 2016-11-02 | NTN Corporation | Sensor-equipped bearing for wheel |
| JP5019988B2 (ja) * | 2007-07-31 | 2012-09-05 | Ntn株式会社 | センサ付車輪用軸受 |
| JP5274343B2 (ja) * | 2008-04-10 | 2013-08-28 | Ntn株式会社 | センサ付車輪用軸受 |
| JP5123086B2 (ja) * | 2008-07-09 | 2013-01-16 | フタバ産業株式会社 | ブレーキペダル装置 |
| KR101574304B1 (ko) | 2008-10-15 | 2015-12-03 | 엔티엔 가부시키가이샤 | 센서가 장착된 차륜용 베어링 |
| US8540431B2 (en) | 2009-03-26 | 2013-09-24 | Ntn Corporation | Sensor-equipped bearing for wheel |
-
2011
- 2011-11-09 EP EP11841065.3A patent/EP2642265B1/en not_active Not-in-force
- 2011-11-09 WO PCT/JP2011/075805 patent/WO2012066995A1/ja active Application Filing
- 2011-11-09 CN CN201180054760.5A patent/CN103210291B/zh not_active Expired - Fee Related
- 2011-11-09 US US13/883,718 patent/US10066665B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1194661A (ja) * | 1997-09-18 | 1999-04-09 | Nissan Motor Co Ltd | 路面摩擦係数推定装置 |
| JP2003530565A (ja) | 2000-04-10 | 2003-10-14 | ザ テイムケン コンパニー | 荷重を監視するためのセンサを備えたベアリングアセンブリ |
| JP2004538564A (ja) * | 2001-08-11 | 2004-12-24 | エフ・アー・ゲー・クーゲルフィッシャー・ゲオルク・シェーファー・カー・ゲー・アー・アー | 回転部分の応力の非接触測定 |
| JP2004237881A (ja) * | 2003-02-06 | 2004-08-26 | Toyota Motor Corp | 路面状態検出装置 |
| JP2005022602A (ja) * | 2003-07-02 | 2005-01-27 | Honda Motor Co Ltd | 車両のタイヤ情報システム |
| JP2010043901A (ja) | 2008-08-11 | 2010-02-25 | Ntn Corp | センサ付車輪用軸受 |
| JP2010181154A (ja) | 2009-02-03 | 2010-08-19 | Ntn Corp | センサ付車輪用軸受 |
| JP2010230406A (ja) * | 2009-03-26 | 2010-10-14 | Ntn Corp | センサ付車輪用軸受 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2642265A4 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2869049A4 (en) * | 2012-06-27 | 2016-02-24 | Ntn Toyo Bearing Co Ltd | VEHICLE WHEEL BEARING DEVICE HAVING A SENSOR |
| US9616708B2 (en) | 2012-06-27 | 2017-04-11 | Ntn Corporation | Vehicle-wheel bearing device with sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130223778A1 (en) | 2013-08-29 |
| EP2642265B1 (en) | 2015-10-14 |
| CN103210291B (zh) | 2015-07-01 |
| US10066665B2 (en) | 2018-09-04 |
| EP2642265A4 (en) | 2014-09-10 |
| EP2642265A1 (en) | 2013-09-25 |
| CN103210291A (zh) | 2013-07-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2012066995A1 (ja) | センサ付車輪用軸受 | |
| WO2010110173A1 (ja) | センサ付車輪用軸受 | |
| WO2010055636A1 (ja) | センサ付車輪用軸受 | |
| WO2009125583A1 (ja) | センサ付車輪用軸受 | |
| JP5143039B2 (ja) | センサ付車輪用軸受 | |
| JP2006300086A (ja) | 荷重測定装置付転がり軸受ユニット | |
| JP5638310B2 (ja) | センサ付車輪用軸受 | |
| JP5268756B2 (ja) | センサ付車輪用軸受 | |
| US20150260590A1 (en) | Wheel bearing device with attached sensor | |
| WO2012033018A1 (ja) | センサ付車輪用軸受 | |
| JP5646291B2 (ja) | センサ付車輪用軸受 | |
| JP5268755B2 (ja) | センサ付車輪用軸受 | |
| JP5553731B2 (ja) | センサ付車輪用軸受 | |
| JP5731308B2 (ja) | センサ付車輪用軸受 | |
| JP2007051962A (ja) | 荷重測定装置 | |
| JP2010127376A (ja) | センサ付車輪用軸受 | |
| JP5489929B2 (ja) | センサ付車輪用軸受 | |
| JP2010230406A (ja) | センサ付車輪用軸受 | |
| JP5996297B2 (ja) | センサ付車輪用軸受装置 | |
| JP2010243190A (ja) | センサ付車輪用軸受 | |
| JP2010101720A (ja) | センサ付車輪用軸受 | |
| JP5864331B2 (ja) | センサ付車輪用軸受装置 | |
| JP2010121745A (ja) | センサ付車輪用軸受 | |
| JP5300429B2 (ja) | センサ付車輪用軸受 | |
| JP2009162640A (ja) | センサ付車輪用軸受 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11841065 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13883718 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011841065 Country of ref document: EP |