KR20160148665A - 로봇의 제어 장치 - Google Patents
로봇의 제어 장치 Download PDFInfo
- Publication number
- KR20160148665A KR20160148665A KR1020167033371A KR20167033371A KR20160148665A KR 20160148665 A KR20160148665 A KR 20160148665A KR 1020167033371 A KR1020167033371 A KR 1020167033371A KR 20167033371 A KR20167033371 A KR 20167033371A KR 20160148665 A KR20160148665 A KR 20160148665A
- Authority
- KR
- South Korea
- Prior art keywords
- angle
- robot
- motor
- joint
- command
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
- B25J9/1633—Program controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K9/00—Arc welding or cutting
- B23K9/12—Automatic feeding or moving of electrodes or work for spot or seam welding or cutting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/088—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices with position, velocity or acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/02—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/106—Program-controlled manipulators characterised by positioning means for manipulator elements with articulated links
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
- B25J9/1638—Program controls characterised by the control loop compensation for arm bending/inertia, pay load weight/inertia
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
- B25J9/1641—Program controls characterised by the control loop compensation for backlash, friction, compliance, elasticity in the joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1674—Program controls characterised by safety, monitoring, diagnostic
- B25J9/1676—Avoiding collision or forbidden zones
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/41—Servomotor, servo controller till figures
- G05B2219/41443—Position reference ffw for compensation of position
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
Abstract
Description
도 2는 본 발명의 실시 형태에 의한 제어 장치의 개략 구성을 도시하는 블록도이다.
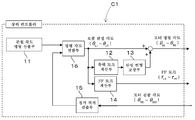
도 3은 본 발명의 제1 실시 형태에 의한 상위 컨트롤러의 개략 구성을 도시하는 블록도이다.
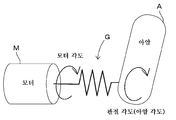
도 4는 본 실시 형태에 의한 로봇의 관절에 존재하는 휨 요소(탄성 변형 요소)를 모식적으로 도시하는 설명도이다.
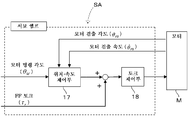
도 5는 본 실시 형태에 의한 서보 앰프의 개략 구성을 도시하는 블록도이다.
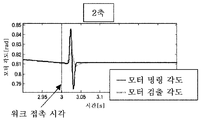
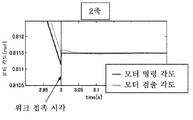
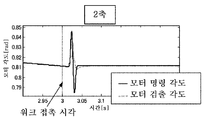
도 6a는 본 실시 형태(제1 실시 형태)에 의한 제어 장치에 의하여 터치 센싱 동작을 행하게 한 때의, 로봇의 제2 축의 모터 거동을 나타내는 그래프이다.
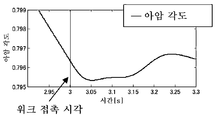
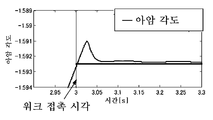
도 6b는 본 실시 형태(제1 실시 형태)에 의한 제어 장치에 의하여 터치 센싱 동작을 행하게 한 때의, 로봇의 제2 축의 아암 거동을 나타내는 그래프이다.
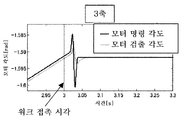
도 6c는 본 실시 형태(제1 실시 형태)에 의한 제어 장치에 의하여 터치 센싱 동작을 행하게 한 때의, 로봇의 제3 축의 모터 거동을 나타내는 그래프이다.
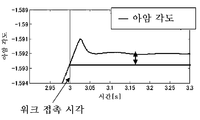
도 6d는 본 실시 형태(제1 실시 형태)에 의한 제어 장치에 의하여 터치 센싱 동작을 행하게 한 때의, 로봇의 제3 축의 아암 거동을 나타내는 그래프이다.
도 7a는 정지 위치 검출부 및 명령 각도 전환부를 구비하지 않는 제어 장치에 의하여 터치 센싱 동작을 행하게 한 때의, 로봇의 제2 축의 모터 거동을 나타내는 그래프이다.
도 7b는 정지 위치 검출부 및 명령 각도 전환부를 구비하지 않는 제어 장치에 의하여 터치 센싱 동작을 행하게 한 때의, 로봇의 제2 축의 아암 거동을 나타내는 그래프이다.
도 7c는 정지 위치 검출부 및 명령 각도 전환부를 구비하지 않는 제어 장치에 의하여 터치 센싱 동작을 행하게 한 때의, 로봇의 제3 축의 모터 거동을 나타내는 그래프이다.
도 7d는 정지 위치 검출부 및 명령 각도 전환부를 구비하지 않는 제어 장치에 의하여 터치 센싱 동작을 행하게 한 때의, 로봇 제3 축의 아암 거동을 나타내는 그래프이다.
도 8은 본 발명의 제2 실시 형태에 의한 상위 컨트롤러의 개략 구성을 도시하는 블록도이다.
도 9a는 본 실시 형태(제2 실시 형태)에 의한 제어 장치에 의하여 터치 센싱 동작을 행하게 한 때의, 로봇의 제2 축의 모터 거동을 나타내는 그래프이다.
도 9b는 본 실시 형태(제2 실시 형태)에 의한 제어 장치에 의하여 터치 센싱 동작을 행하게 한 때의, 로봇의 제2 축의 아암 거동을 나타내는 그래프이다.
도 9c는 본 실시 형태(제2 실시 형태)에 의한 제어 장치에 의하여 터치 센싱 동작을 행하게 한 때의, 로봇의 제3 축의 모터 거동을 나타내는 그래프이다.
도 9d는 본 실시 형태(제2 실시 형태)에 의한 제어 장치에 의하여 터치 센싱 동작을 행하게 한 때의, 로봇의 제3 축의 아암 거동을 나타내는 그래프이다.






11: 관절 각도 명령 산출부
12: 축력 토크 계산부
13: 탄성 변형 보상부
14: FF 토크 계산부
15: 정지 위치 검출부
16: 명령 각도 전환부
17: 위치 속도 제어부
18: 토크 제어부
21: 역탄성 변형 보상부
J: 관절
M: 모터
R: 용접 로봇(로봇)
W: 워크(외부의 구조물)
C1, C2: 상위 컨트롤러
SA: 서보 앰프
Claims (4)
- 모터에 의하여 구동되는 로봇의 관절의 각도를 제어하는 제어 장치이며,
상기 로봇에 원하는 동작을 시키기 위하여, 상기 관절의 각도를 지시하는 제1 각도 명령을 산출하여 출력하는 관절 각도 명령 산출부와,
상기 제1 각도 명령을 수취하면, 수취한 상기 제1 각도 명령에 따라 동작하는 상기 로봇의 관절 축에 발생하는 제1 축력 토크를 상기 로봇의 동역학 모델에 기초하여 산출하는 축력 토크 계산부와,
상기 제1 축력 토크, 및 상기 로봇의 관절의 강성을 나타내는 스프링 상수로부터 산출되는 당해 관절의 휨량을, 상기 축력 토크 계산부가 수취한 상기 제1 각도 명령이 지시하는 관절의 각도에 가산하여, 상기 모터의 회전 각도를 지시하는 모터 명령 각도를 산출하여 출력하는 탄성 변형 보상부와,
상기 로봇이 외부의 구조물과 접촉한 때의 상기 모터의 각도를 모터 검출 각도로서 검출하여 출력하는 정지 위치 검출부와,
상기 정지 위치 검출부가 상기 모터의 각도를 출력한 때, 상기 관절 각도 명령 산출부로부터 출력된 상기 제1 각도 명령 대신, 상기 정지 위치 검출부에서 검출한 상기 모터의 각도를, 상기 관절의 각도를 지시하는 제2 각도 명령으로서 출력하는 명령 각도 전환부를 구비하는 것을 특징으로 하는, 로봇의 제어 장치. - 제1항에 있어서,
상기 축력 토크 계산부가 상기 제2 각도 명령을 수취하면, 수취한 상기 제2 각도 명령에 따라 동작하는 상기 로봇의 관절 축에 발생하는 제2 축력 토크를 상기 로봇의 동역학 모델에 기초하여 산출하고,
상기 탄성 변형 보상부가 상기 제2 축력 토크, 및 상기 관절의 휨량을, 상기 축력 토크 계산부가 수취한 상기 제2 각도 명령이 지시하는 관절의 각도에 가산하여 모터 명령 각도를 산출하는 것을 특징으로 하는, 로봇의 제어 장치. - 제2항에 있어서,
상기 축력 토크 계산부로부터 출력되는 상기 제1 축력 토크 또는 상기 제2 축력 토크와 상기 관절의 강성을 나타내는 스프링 상수로부터 산출되는 상기 관절의 휨량을 상기 모터 검출 각도로부터 감산하여 보정 후 모터 검출 각도를 산출하는 역탄성 변형 보상부를 구비하고,
상기 정지 위치 검출부가 상기 모터 검출 각도 대신 상기 보정 후 모터 검출 각도를 검출하여 출력하는 것을 특징으로 하는, 로봇의 제어 장치. - 제1항 내지 제3항 중 어느 한 항에 있어서,
상기 제1 각도 명령을 수취하면, 상기 제1 각도 명령대로 상기 관절이 동작할 때 상기 모터에 발생하는 FF 토크를 상기 로봇과 모터의 동역학 모델에 기초하여 산출하는 FF 토크 계산부와,
출력된 상기 모터 명령 각도에 따라, 상기 모터에 발생시키는 토크를 지시하는 토크 명령을 출력하는 위치 속도 제어부와,
상기 위치 속도 제어부로부터 출력된 토크 명령에 상기 FF 토크를 가산한 명령값에 따라 상기 모터를 제어하는 토크 제어부를 구비하는 것을 특징으로 하는, 로봇의 제어 장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014114086A JP5897644B2 (ja) | 2014-06-02 | 2014-06-02 | ロボットの制御装置 |
| JPJP-P-2014-114086 | 2014-06-02 | ||
| PCT/JP2015/065108 WO2015186572A1 (ja) | 2014-06-02 | 2015-05-26 | ロボットの制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20160148665A true KR20160148665A (ko) | 2016-12-26 |
| KR101864062B1 KR101864062B1 (ko) | 2018-06-01 |
Family
ID=54766645
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020167033371A Active KR101864062B1 (ko) | 2014-06-02 | 2015-05-26 | 로봇의 제어 장치 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10022866B2 (ko) |
| EP (1) | EP3150341B1 (ko) |
| JP (1) | JP5897644B2 (ko) |
| KR (1) | KR101864062B1 (ko) |
| CN (1) | CN106457560B (ko) |
| WO (1) | WO2015186572A1 (ko) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9666465B2 (en) * | 2013-12-12 | 2017-05-30 | Seagate Technology Llc | Positioning apparatus |
| JP6816495B2 (ja) * | 2016-12-19 | 2021-01-20 | 株式会社デンソーウェーブ | ロボットのたわみ補正方法、ロボットの制御装置 |
| JP6400751B2 (ja) | 2017-01-26 | 2018-10-03 | ファナック株式会社 | ロボットプログラム修正装置、ロボット制御装置、ロボットシミュレーション装置およびロボットプログラム修正方法 |
| JP6860417B2 (ja) * | 2017-05-18 | 2021-04-14 | 川崎重工業株式会社 | 減速機角度伝達誤差同定システム及び減速機角度伝達誤差同定方法 |
| JP6986373B2 (ja) * | 2017-06-21 | 2021-12-22 | 川崎重工業株式会社 | ロボットシステム及びロボットシステムの制御方法 |
| JP6633587B2 (ja) * | 2017-10-05 | 2020-01-22 | ファナック株式会社 | ロボットの構成部材の速度を制限する制御装置 |
| US11213912B2 (en) * | 2018-06-25 | 2022-01-04 | Bwxt Nuclear Operations Group, Inc. | Methods and systems for monitoring a temperature of a component during a welding operation |
| TWI663813B (zh) * | 2018-11-28 | 2019-06-21 | 財團法人工業技術研究院 | 輸出轉矩的計算裝置與其計算方法 |
| JP7305993B2 (ja) * | 2019-03-14 | 2023-07-11 | 株式会社デンソーウェーブ | ロボットの制御装置、ロボットの制御方法 |
| CN109834714B (zh) * | 2019-04-04 | 2021-05-28 | 北京卫星制造厂有限公司 | 一种用于多机器人的轨迹控制系统与方法 |
| CN113891786B (zh) * | 2019-04-17 | 2024-07-12 | 优傲机器人公司 | 基于自适应摩擦来控制机器人臂的方法 |
| JP7349605B2 (ja) * | 2019-06-04 | 2023-09-25 | パナソニックIpマネジメント株式会社 | ロボットの制御方法 |
| CN112894764A (zh) | 2019-12-03 | 2021-06-04 | 台达电子工业股份有限公司 | 机械手臂系统及机械手臂控制方法 |
| TWI712471B (zh) * | 2019-12-03 | 2020-12-11 | 台達電子工業股份有限公司 | 機械手臂系統及機械手臂控制方法 |
| JP7379208B2 (ja) * | 2020-02-21 | 2023-11-14 | キヤノン株式会社 | 連続体ロボットの制御システム及びその制御方法、並びに、連続体ロボット |
| JP7556951B2 (ja) | 2020-05-11 | 2024-09-26 | ファナック株式会社 | プログラム生成装置およびプログラム生成方法 |
| CN114800503B (zh) * | 2022-04-26 | 2024-09-20 | 乐聚(深圳)机器人技术有限公司 | 多关节机器人运动控制方法、装置、电子设备及存储介质 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01249268A (ja) | 1988-03-31 | 1989-10-04 | Kobe Steel Ltd | 自動溶接装置のワーク検知方法 |
| JPH07308780A (ja) | 1994-05-20 | 1995-11-28 | Kawasaki Steel Corp | 溶接ロボットのワイヤタッチセンシング方法 |
| JPH11320477A (ja) * | 1998-05-21 | 1999-11-24 | Nachi Fujikoshi Corp | 産業用ロボットの動作異常検出方法 |
| JP2001290541A (ja) | 2000-04-11 | 2001-10-19 | Yaskawa Electric Corp | 産業用機械の加減速方法 |
| JP2013244540A (ja) * | 2012-05-23 | 2013-12-09 | Nachi Fujikoshi Corp | 産業用ロボットの重力たわみ角補正方法および装置 |
| JP2013248681A (ja) * | 2012-05-30 | 2013-12-12 | Kobe Steel Ltd | 多関節ロボットの弾性変形補償制御装置および制御方法 |
| JP2013248683A (ja) * | 2012-05-30 | 2013-12-12 | Kobe Steel Ltd | 多関節ロボットの弾性変形補償制御装置および制御方法 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5455497A (en) * | 1992-04-20 | 1995-10-03 | Honda Giken Kogyo Kabushiki Kaisha | Legged mobile robot and a system for controlling the same |
| ATE199787T1 (de) * | 1996-10-08 | 2001-03-15 | Siemens Ag | Verfahren und regelungsstruktur zur momentenvorsteuerung numerisch geregelter, elastischer und damit schwingungsfähiger mehrmassensysteme |
| US6774598B1 (en) * | 1999-09-08 | 2004-08-10 | Dr. Johannes Heidenhain Gmbh | Method and circuitry for producing nominal position values for a closed loop position control of a numerically continuous-path controlled machine |
| DE10139638A1 (de) * | 2001-08-11 | 2003-02-20 | Heidenhain Gmbh Dr Johannes | Anordnung zur Erzeugung von Führungsgrößen für Regelkreise einer numerisch gesteuerten Maschine |
| EP1475192B1 (en) * | 2001-12-28 | 2010-05-19 | Honda Giken Kogyo Kabushiki Kaisha | Gait producing device for leg type movable robot |
| JP4246638B2 (ja) * | 2002-01-18 | 2009-04-02 | 本田技研工業株式会社 | 脚式移動ロボットの制御装置 |
| JP3983577B2 (ja) * | 2002-03-26 | 2007-09-26 | 株式会社神戸製鋼所 | 推定装置を用いた制御装置 |
| GB2417090A (en) * | 2003-04-28 | 2006-02-15 | Stephen James Crampton | CMM arm with exoskeleton |
| KR101083414B1 (ko) * | 2003-06-27 | 2011-11-14 | 혼다 기켄 고교 가부시키가이샤 | 다리식 이동 로봇의 제어장치 |
| JP4536349B2 (ja) * | 2003-09-22 | 2010-09-01 | パナソニック株式会社 | 弾性体アクチュエータを用いた多自由度のロボットアームの制御装置及び制御方法 |
| JP4192780B2 (ja) * | 2003-12-26 | 2008-12-10 | 株式会社安川電機 | ロボットの制御装置 |
| JP2006167820A (ja) * | 2004-12-13 | 2006-06-29 | Toyota Motor Corp | ロボットアームの制御方法 |
| US8512415B2 (en) * | 2005-03-31 | 2013-08-20 | Massachusetts Institute Of Technology | Powered ankle-foot prothesis |
| US20080009771A1 (en) * | 2006-03-29 | 2008-01-10 | Joel Perry | Exoskeleton |
| JP4413891B2 (ja) * | 2006-06-27 | 2010-02-10 | 株式会社東芝 | シミュレーション装置およびシミュレーション方法並びにシミュレーションプログラム |
| JP2009066685A (ja) * | 2007-09-11 | 2009-04-02 | Sony Corp | ロボット装置及びロボット装置の制御方法 |
| KR20110074520A (ko) * | 2008-09-04 | 2011-06-30 | 아이워크, 아이엔씨. | 하이브리드 지형-적응형 의족 시스템 |
| US20110082566A1 (en) * | 2008-09-04 | 2011-04-07 | Herr Hugh M | Implementing a stand-up sequence using a lower-extremity prosthesis or orthosis |
| JP5232124B2 (ja) * | 2009-10-28 | 2013-07-10 | 本田技研工業株式会社 | 脚式移動ロボットの制御装置 |
| WO2011080949A1 (ja) * | 2009-12-28 | 2011-07-07 | 本田技研工業株式会社 | ロボットの制御装置 |
| JP5311294B2 (ja) * | 2010-04-28 | 2013-10-09 | 株式会社安川電機 | ロボットの接触位置検出装置 |
| KR101953113B1 (ko) * | 2011-05-30 | 2019-03-05 | 삼성전자주식회사 | 로봇 및 그 제어방법 |
| JP5269158B2 (ja) * | 2011-09-01 | 2013-08-21 | 株式会社神戸製鋼所 | 制御方法及び制御装置 |
| US8965580B2 (en) * | 2012-06-21 | 2015-02-24 | Rethink Robotics, Inc. | Training and operating industrial robots |
| JP5986445B2 (ja) * | 2012-07-20 | 2016-09-06 | 国立大学法人九州大学 | 歩行用遊脚振子運動補助具およびアシスト力の制御方法 |
| US9226796B2 (en) * | 2012-08-03 | 2016-01-05 | Stryker Corporation | Method for detecting a disturbance as an energy applicator of a surgical instrument traverses a cutting path |
| CN102825602B (zh) * | 2012-08-21 | 2015-03-25 | 华北电力大学(保定) | 一种基于psd的工业机器人自标定方法及装置 |
| CN105555222B (zh) * | 2013-09-24 | 2018-08-17 | 索尼奥林巴斯医疗解决方案公司 | 医用机械臂装置、医用机械臂控制系统、医用机械臂控制方法、及程序 |
-
2014
- 2014-06-02 JP JP2014114086A patent/JP5897644B2/ja active Active
-
2015
- 2015-05-26 EP EP15803269.8A patent/EP3150341B1/en active Active
- 2015-05-26 WO PCT/JP2015/065108 patent/WO2015186572A1/ja not_active Ceased
- 2015-05-26 KR KR1020167033371A patent/KR101864062B1/ko active Active
- 2015-05-26 CN CN201580028843.5A patent/CN106457560B/zh active Active
- 2015-05-26 US US15/315,318 patent/US10022866B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01249268A (ja) | 1988-03-31 | 1989-10-04 | Kobe Steel Ltd | 自動溶接装置のワーク検知方法 |
| JPH07308780A (ja) | 1994-05-20 | 1995-11-28 | Kawasaki Steel Corp | 溶接ロボットのワイヤタッチセンシング方法 |
| JPH11320477A (ja) * | 1998-05-21 | 1999-11-24 | Nachi Fujikoshi Corp | 産業用ロボットの動作異常検出方法 |
| JP2001290541A (ja) | 2000-04-11 | 2001-10-19 | Yaskawa Electric Corp | 産業用機械の加減速方法 |
| JP2013244540A (ja) * | 2012-05-23 | 2013-12-09 | Nachi Fujikoshi Corp | 産業用ロボットの重力たわみ角補正方法および装置 |
| JP2013248681A (ja) * | 2012-05-30 | 2013-12-12 | Kobe Steel Ltd | 多関節ロボットの弾性変形補償制御装置および制御方法 |
| JP2013248683A (ja) * | 2012-05-30 | 2013-12-12 | Kobe Steel Ltd | 多関節ロボットの弾性変形補償制御装置および制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015186572A1 (ja) | 2015-12-10 |
| EP3150341A1 (en) | 2017-04-05 |
| JP5897644B2 (ja) | 2016-03-30 |
| US10022866B2 (en) | 2018-07-17 |
| EP3150341B1 (en) | 2020-10-07 |
| CN106457560B (zh) | 2018-12-18 |
| KR101864062B1 (ko) | 2018-06-01 |
| US20170190049A1 (en) | 2017-07-06 |
| CN106457560A (zh) | 2017-02-22 |
| JP2015226961A (ja) | 2015-12-17 |
| EP3150341A4 (en) | 2017-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101864062B1 (ko) | 로봇의 제어 장치 | |
| JP5916583B2 (ja) | 多関節ロボットのウィービング制御装置 | |
| JP5374613B2 (ja) | 多関節ロボットの弾性変形補償制御装置および制御方法 | |
| JP6484265B2 (ja) | 学習制御機能を備えたロボットシステム及び学習制御方法 | |
| JP5417161B2 (ja) | ロボットの制振方法およびロボットの制御装置 | |
| JP7220353B2 (ja) | コントローラの情報送信方法及びエンコーダの異常検出方法 | |
| JP2008296310A (ja) | 加工ロボットの制御装置 | |
| JP5890473B2 (ja) | モータを制御するモータ制御装置 | |
| JPWO2005009692A1 (ja) | ロボットアームの制御方法および制御装置 | |
| JPWO2007111252A1 (ja) | マニピュレータの制御方法および制御システム | |
| JP6044511B2 (ja) | ロボットの制御方法及びロボットシステム | |
| JP2017209762A (ja) | ロボット装置、ロボット制御方法、プログラム、記録媒体及び物品の製造方法 | |
| US11141855B2 (en) | Robot system, method of controlling robot arm, recording medium, and method of manufacturing an article | |
| JP6238869B2 (ja) | 接触制御装置 | |
| CN108748144A (zh) | 一种人机协作机械臂的碰撞识别方法 | |
| JP5868266B2 (ja) | 多関節ロボットの弾性変形補償制御装置および制御方法 | |
| JPWO2019012942A1 (ja) | ロボット制御装置 | |
| JPH08155868A (ja) | ロボットの制御方法および装置 | |
| CN109476024B (zh) | 机器人的控制方法以及焊接方法 | |
| KR20230122647A (ko) | 스프링 정수 보정 장치 및 그 방법 및 기록 매체 | |
| JP6711536B2 (ja) | 外力検出方法 | |
| JP2014137626A (ja) | ロボットの制御方法及びロボット制御装置 | |
| JP6926882B2 (ja) | ロボットの制御装置 | |
| JP2019042842A (ja) | 駆動機械の学習制御装置及び学習制御方法 | |
| JP2019055456A (ja) | ロボットの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0105 | International application |
Patent event date: 20161129 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20180212 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20180416 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20180528 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20180528 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20210428 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20230418 Start annual number: 6 End annual number: 6 |