JP7652012B2 - ワイヤロープ検査装置 - Google Patents
ワイヤロープ検査装置 Download PDFInfo
- Publication number
- JP7652012B2 JP7652012B2 JP2021135610A JP2021135610A JP7652012B2 JP 7652012 B2 JP7652012 B2 JP 7652012B2 JP 2021135610 A JP2021135610 A JP 2021135610A JP 2021135610 A JP2021135610 A JP 2021135610A JP 7652012 B2 JP7652012 B2 JP 7652012B2
- Authority
- JP
- Japan
- Prior art keywords
- wire rope
- unit
- detection unit
- detection
- inspection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B7/00—Other common features of elevators
- B66B7/12—Checking, lubricating, or cleaning means for ropes, cables or guides
- B66B7/1207—Checking means
- B66B7/1215—Checking means specially adapted for ropes or cables
- B66B7/123—Checking means specially adapted for ropes or cables by analysing magnetic variables
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/72—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables
- G01N27/82—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables for investigating the presence of flaws
- G01N27/83—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables for investigating the presence of flaws by investigating stray magnetic fields
Landscapes
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Electrochemistry (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Investigating Or Analyzing Materials By The Use Of Magnetic Means (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Lift-Guide Devices, And Elevator Ropes And Cables (AREA)
Description
この発明の第2の局面におけるワイヤロープ検査装置は、検査対象であるワイヤロープに対して磁束を印加する励磁部と、励磁部により磁束が印加されるワイヤロープの磁束を検知する検知部と、ワイヤロープの検査を行う検査運転時に検知部が配置される検査位置まで、ワイヤロープに近接する方向に検知部を弾性力により付勢する付勢部と、通常運転時に検知部が配置される通常運転位置まで、ワイヤロープから離間する方向に検知部を移動させる駆動部と、を備え、検知部は、ワイヤロープの延びる方向に直交する方向の一方側に配置される第1部分と、他方側に配置される第2部分とを含み、付勢部は、弾性力により第1部分および第2部分を互いに近づけるように検査位置まで付勢するように構成されている。
この発明の第3の局面におけるワイヤロープ検査装置は、検査対象であるワイヤロープに対して磁束を印加する励磁部と、励磁部により磁束が印加されるワイヤロープの磁束を検知する検知部と、ワイヤロープの検査を行う検査運転時に検知部が配置される検査位置まで、ワイヤロープに近接する方向に検知部を弾性力により付勢する付勢部と、通常運転時に検知部が配置される通常運転位置まで、ワイヤロープから離間する方向に検知部を移動させる駆動部と、を備え、検知部が付勢部に付勢されることによってワイヤロープに近接する方向に移動する際に、検知部の移動速度を減衰させる減衰部をさらに備える。
まず、図1~図8を参照して、本発明の第1実施形態によるワイヤロープ検査システム100およびワイヤロープ検査装置101の構成について説明する。なお、以下の説明において、「直交」とは、90度および90度近傍の角度をなして交差することを意味する。また、「平行」とは、平行および略平行を含む。
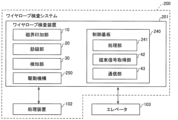
図1に示すように、ワイヤロープ検査システム100は、ワイヤロープ検査装置101と、処理装置102とを備える。ワイヤロープ検査システム100は、エレベータ103に設けられたワイヤロープWの検査を行う。具体的には、ワイヤロープ検査システム100は、検査対象であるエレベータ103のワイヤロープWの異常(素線断線など)を検査するためのシステムである。
図1および図2に示すように、エレベータ103は、かご室103a、シーブ103b、シーブ103c、筐体103d、制御装置103e、および、ワイヤロープWを備える。エレベータ103は、巻上機に設けられたシーブ103b(滑車)が回転してワイヤロープWを巻き上げることによって、人および積み荷などを積載するかご室103aを鉛直方向に移動させるように構成されている。また、エレベータ103は、たとえば、2つのシーブ103bおよびシーブ103cを備えるダブルラップ方式(フルラップ方式)のロープ式エレベータである。ダブルラップ方式とは、巻上機のシーブ103bから、そらせ車であるシーブ103cへと導かれたワイヤロープWを再度巻き上げ機のシーブ103bに戻すことによって、シーブ103bに2回ワイヤロープWを掛ける構造である。また、シーブ103bおよびシーブ103cは、筐体103dの内部に配置されている。
図2に示すように、処理装置102は、通信部102a、制御部102b、記憶部102c、および、表示部102dを備える。処理装置102は、ワイヤロープ検査装置101によるワイヤロープWの磁束の計測結果の表示、ワイヤロープ検査装置101によるワイヤロープWの磁束の計測結果に基づく解析などを行う。具体的には、処理装置102は、後述する検知部30の検知コイル31aおよび31bからの検知信号を取得するとともに、取得された検知信号に基づいて、ワイヤロープWの異常の有無を判定するように構成されている。処理装置102は、たとえば、ワイヤロープWの検査を行う検査作業者が用いるパーソナルコンピュータである。
次に、第1実施形態におけるワイヤロープ検査装置101の構成について説明する。
図4および図5に示すように、検査運転時(検査運転モード)において、第1実施形態によるワイヤロープ検査システム100では、ワイヤロープ検査装置101に対して、シーブ103bの回転によってワイヤロープWがX2方向に向かって導かれる。ワイヤロープ検査装置101に導かれたワイヤロープWは、まず磁界印加部10によって、予め磁界が整えられる。そして、励磁部20の励振コイル21が、予め磁界の整えられた(整磁された)ワイヤロープWの磁化の状態を励振する。そして、検知部30の検知コイル31aおよび31bが、整磁された後に磁化の状態が励振されたワイヤロープWの磁束を全磁束法により検知する。すなわち、第1実施形態では、検知コイル31aおよび31bは、磁界印加部10により予め磁界が印加された後(整磁された後)に、ワイヤロープWの磁束を検知するように構成されている。
第1実施形態では、検知コイル31aおよび31bは、2つのコイルによって1つのワイヤロープWを挟み込むように配置される。なお、検知コイル31aおよび31bは、複数(4本)のワイヤロープWの各々に設けられる。すなわち、複数(4本)のワイヤロープWの各々に、検知コイル31aおよび検知コイル31bの2つのコイルが設けられる。したがって、第1部分30aおよび第2部分30bの各々には、それぞれ、4つの検知コイル31aおよび検知コイル31bが配置されている。
次に、図3、および、図6~8を参照して、ワイヤロープ検査装置101における検知部30の移動について説明する。上記したように、第1実施形態におけるワイヤロープ検査装置101では、通常運転時には、検知部30に対するワイヤロープWの移動速度が比較的大きくワイヤロープWの進行方向(ワイヤロープWの延びる方向、X方向)に対して垂直な方向(YZ平面内の方向)への振動による振れ幅も大きい。そして、検査運転時には、検知部30に対するワイヤロープWの移動速度が比較的小さくワイヤロープWの進行方向に対して垂直な方向への振れ幅も小さい。第1実施形態におけるワイヤロープ検査装置101は、制御基板40の処理部41による制御によって、通常運転時(通常運転モード)と検査運転時(検査運転モード)において、検知部30のワイヤロープWに対する離間距離を変更させるように構成されている。
図6に示すように、ワイヤロープ検査装置101は、駆動機構50を備える。駆動機構50は、駆動部ベース部50a、駆動部51、保持板52aおよび52b、リニアガイド53aおよび53b、および、リニアガイドレール53cを含む。なお、駆動部51は、特許請求の範囲における「ソレノイド式駆動部」の一例である。
図7および図8に示すように、処理装置102に対する入力操作に基づいて、エレベータ103の動作が検査運転モードから通常運転モードへと切り替えられた場合には、制御基板40の処理部41によって、検知部30が検査位置から通常運転位置へと移動するように、駆動機構50の各部が制御される。なお、図7および図8において、アースに接続されているように図示されている部分は、駆動部ベース部50aに固定されていることを示している。
また、処理装置102に対する入力操作に基づいて、エレベータ103の動作が通常運転モードから検査運転モードへと切り替えられた場合には、制御基板40の処理部41によって、検知部30が通常運転位置から検査位置へと移動するように、駆動機構50の各部が制御される。
第1実施形態のワイヤロープ検査装置101では、以下のような効果を得ることができる。
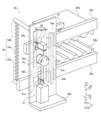
図9~図13を参照して、第2実施形態によるワイヤロープ検査装置201の構成について説明する。この第2実施形態は、ソレノイド式駆動部によってワイヤロープWから離間するように検知部30を移動させるように構成した第1実施形態と異なり、モータ251によってワイヤロープWから離間するように検知部30を移動させるように構成されている。なお、図中において、上記第1実施形態と同様の構成の部分には、同一の符号を付して図示するとともに説明を省略する。
図9および図10に示すように、第2実施形態によるワイヤロープ検査システム200は、ワイヤロープ検査装置201を備える。そして、ワイヤロープ検査装置201は、制御基板240、および、駆動機構250を備える。なお、第2実施形態によるワイヤロープWの磁束(磁界)を測定するための構成(磁界印加部10、励磁部20、および、検知部30)は、第1実施形態と同様である。
図11および図12に示すように、駆動機構250は、駆動部ベース部250aを含む。駆動部ベース部250aは、第1実施形態の駆動部ベース部50aと同様に、ワイヤロープ検査装置201の筐体101aが固定される基台部101b(図10参照)に取り付けられる。なお、駆動機構250は、付勢部54を含む。付勢部54は、第1実施形態と同様に、弾性力により第1部分30aおよび第2部分30bを互いに近づけるように検査位置まで付勢するように構成されている。
図11および図12に示すように、第1実施形態と同様に、処理装置102に対する入力操作に基づいて、エレベータ103の動作が検査運転モードから通常運転モードへと切り替えられた場合には、検知部30が検査位置から通常運転位置へと移動するように、制御基板240の処理部241によって駆動機構250の各部が制御される。
また、第1実施形態と同様に、処理装置102に対する入力操作に基づいて、エレベータ103の動作が通常運転モードから検査運転モードへと切り替えられた場合には、検知部30が通常運転位置から検査位置へと移動するように、制御基板240の処理部241によって駆動機構250の各部が制御される。
第2実施形態では、以下のような効果を得ることができる。
図14~図16を参照して、第3実施形態によるワイヤロープ検査装置301の構成について説明する。この第3実施形態では、第1部分330aおよび第2部分330bが、それぞれ、ワイヤロープWと対向する面に傾斜面332aおよび332bを有する。なお、図中において、上記第1および第2実施形態と同様の構成の部分には、同一の符号を付して図示するとともに説明を省略する。
図14に示すように、第3実施形態によるワイヤロープ検査システム300は、ワイヤロープ検査装置301を備える。そして、ワイヤロープ検査装置301は、検知部330を含む。そして、検知部330は、第1部分330aおよび第2部分330bを含む。また、第1部分330aおよび330bは、それぞれ、検知コイル31aおよび31bを有する。検知コイル31aおよび31bの構成は、第1実施形態と同様である。そして、第3実施形態によるワイヤロープWの磁束(磁界)を測定するための構成は、第1実施形態と同様である。
第3実施形態では、以下のような効果を得ることができる。
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更(変形例)が含まれる。
上記した例示的な実施形態は、以下の態様の具体例であることが当業者により理解される。
検査対象であるワイヤロープに対して磁束を印加する励磁部と、
前記励磁部により磁束が印加される前記ワイヤロープの磁束を検知する検知部と、
前記ワイヤロープの検査を行う検査運転時に前記検知部が配置される検査位置まで、前記ワイヤロープに近接する方向に前記検知部を弾性力により付勢する付勢部と、
通常運転時に前記検知部が配置される通常運転位置まで、前記ワイヤロープから離間する方向に前記検知部を移動させる駆動部と、を備える、ワイヤロープ検査装置。
前記検知部は、前記ワイヤロープの延びる方向に直交する方向の一方側に配置される第1部分と、他方側に配置される第2部分とを含み、
前記付勢部は、弾性力により前記第1部分および前記第2部分を互いに近づけるように前記検査位置まで付勢するように構成されている、項目1に記載のワイヤロープ検査装置。
前記駆動部は、前記第1部分と前記第2部分とを、前記ワイヤロープから等しい距離離間するように移動させるように構成されている、項目2に記載のワイヤロープ検査装置。
前記第1部分および前記第2部分は、前記付勢部に付勢されることにより互いに当接することによって位置決めされた状態で、前記検査位置に配置されるように構成されている、項目2または3に記載のワイヤロープ検査装置。
前記検知部は、前記ワイヤロープが前記ワイヤロープの延びる方向に沿って移動している状態において、移動している前記ワイヤロープの磁束を検知するように構成されており、
前記第1部分および前記第2部分は、前記検査位置において前記ワイヤロープを取り囲むように配置され、前記ワイヤロープと対向する面において、前記ワイヤロープの上流側が前記ワイヤロープから離間する方向に広がるように設けられている傾斜面を有する、項目2~4のいずれか1項に記載のワイヤロープ検査装置。
前記通常運転位置に配置された状態の前記検知部を固定する固定部をさらに備える、項目1~5のいずれか1項に記載のワイヤロープ検査装置。
前記検知部が前記付勢部に付勢されることによって前記ワイヤロープに近接する方向に移動する際に、前記検知部の移動速度を減衰させる減衰部をさらに備える、項目1~6のいずれか1項に記載のワイヤロープ検査装置。
前記駆動部は、電流により磁場を発生させることによって前記検知部を前記ワイヤロープから離間する方向に移動させるソレノイド式駆動部を含み、
前記減衰部は、前記検知部が前記付勢部に付勢されることによって前記ワイヤロープに近接する方向に移動する際に、内部に充填された流体の粘性抵抗によって前記検知部の移動速度を減衰させるダンパ部を含む、項目7に記載のワイヤロープ検査装置。
歯部を有するとともに直線状に延びるラック部をさらに備え、
前記ダンパ部は、前記ラック部の前記歯部と噛み合いながら回転する歯車部を有するとともに、前記歯車部の回転速度を減衰させるように構成されており、
前記ラック部は、一端が前記検知部に固定されているとともに、他端が前記ダンパ部の前記歯車部と噛み合うように構成されている、項目8に記載のワイヤロープ検査装置。
前記駆動部は、一の回転方向に回転することによって、前記検知部を前記ワイヤロープから離間する方向に移動させるモータを含み、
前記モータは、速度制御可能に構成されており、前記検知部が前記付勢部に付勢されることによって前記ワイヤロープに近接する方向に移動する際に、前記一の回転方向と反対の他の回転方向に速度を制限しながら回転することによって、前記検知部の移動速度を減衰させる前記減衰部を兼ねる、項目7に記載のワイヤロープ検査装置。
前記モータの回転軸に接続されているワンウェイクラッチをさらに備え、
前記ワンウェイクラッチは、前記モータが前記検知部に対して前記ワイヤロープから離間する方向に駆動力を加えている場合には、前記モータの回転軸と共に回転し、前記モータが前記検知部に対して前記ワイヤロープに近接する方向に駆動力を加えている場合には、前記モータの回転軸に対して空転するように構成されている、項目10に記載のワイヤロープ検査装置。
前記検知部が前記通常運転位置に配置されていることを検知する位置検知部をさらに備える、項目1~11のいずれか1項に記載のワイヤロープ検査装置。
前記検知部は、エレベータに設けられている前記ワイヤロープが前記エレベータの駆動によって前記ワイヤロープの延びる方向に沿って移動している状態において、移動している前記ワイヤロープの磁束を検知するように構成されており、
前記付勢部は、前記検知部に対する前記ワイヤロープの移動速度が比較的小さい前記エレベータの検査運転時に前記検知部が配置される前記検査位置まで、前記検知部を付勢するように構成されており、
前記駆動部は、前記検知部に対する前記ワイヤロープの移動速度が比較的大きい前記エレベータの通常運転時に前記検知部が配置される前記通常運転位置まで、前記検知部を移動させるように構成されている、項目1~12のいずれか1項に記載のワイヤロープ検査装置。
前記ワイヤロープに対して予め磁界を印加し前記ワイヤロープの磁化の方向を整える磁界印加部をさらに備え、
前記励磁部は、前記磁界印加部によって予め磁界が印加された後に、前記ワイヤロープの磁化の状態を励振する励振コイルを含み、
前記検知部は、前記ワイヤロープの延びる方向に沿って前記ワイヤロープの周りに巻回され、前記励振コイルによって磁化の状態が励振される前記ワイヤロープの磁束を全磁束法によって検知する検知コイルを含み、
前記付勢部は、前記検査位置まで前記検知コイルを弾性力により付勢するように構成されており、
前記駆動部は、前記通常運転位置まで前記検知コイルを移動させるように構成されている、項目1~13のいずれか1項に記載のワイヤロープ検査装置。
20 励磁部
21 励振コイル
30、330 検知部
30a、330a 第1部分
30b、330b 第2部分
31a、31b 検知コイル
51 駆動部(ソレノイド式駆動部)
54 付勢部
55 ダンパ部(減衰部)
55a 歯車部
56a、56b ラック部
57 位置検知部
58 固定部
101、201、301 ワイヤロープ検査装置
103 エレベータ
251 モータ(駆動部、減衰部)
251a 回転軸
258 ブレーキ(固定部)
263 ワンウェイクラッチ
332a、332b 傾斜面
Claims (14)
- 検査対象であるワイヤロープに対して磁束を印加する励磁部と、
前記励磁部により磁束が印加される前記ワイヤロープの磁束を検知する検知部と、
前記ワイヤロープの検査を行う検査運転時に前記検知部が配置される検査位置まで、前記ワイヤロープに近接する方向に前記検知部を弾性力により付勢することにより移動させる付勢部と、
通常運転時に前記検知部が配置される通常運転位置まで、前記ワイヤロープから離間する方向に前記検知部を移動させる駆動部と、を備える、ワイヤロープ検査装置。 - 検査対象であるワイヤロープに対して磁束を印加する励磁部と、
前記励磁部により磁束が印加される前記ワイヤロープの磁束を検知する検知部と、
前記ワイヤロープの検査を行う検査運転時に前記検知部が配置される検査位置まで、前記ワイヤロープに近接する方向に前記検知部を弾性力により付勢する付勢部と、
通常運転時に前記検知部が配置される通常運転位置まで、前記ワイヤロープから離間する方向に前記検知部を移動させる駆動部と、を備え、
前記検知部は、前記ワイヤロープの延びる方向に直交する方向の一方側に配置される第1部分と、他方側に配置される第2部分とを含み、
前記付勢部は、弾性力により前記第1部分および前記第2部分を互いに近づけるように前記検査位置まで付勢するように構成されている、ワイヤロープ検査装置。 - 前記駆動部は、前記第1部分と前記第2部分とを、前記ワイヤロープから等しい距離離間するように移動させるように構成されている、請求項2に記載のワイヤロープ検査装置。
- 前記第1部分および前記第2部分は、前記付勢部に付勢されることにより互いに当接することによって位置決めされた状態で、前記検査位置に配置されるように構成されている、請求項2または3に記載のワイヤロープ検査装置。
- 前記検知部は、前記ワイヤロープが前記ワイヤロープの延びる方向に沿って移動している状態において、移動している前記ワイヤロープの磁束を検知するように構成されており、
前記第1部分および前記第2部分は、前記検査位置において前記ワイヤロープを取り囲むように配置され、前記ワイヤロープと対向する面において、前記ワイヤロープの上流側が前記ワイヤロープから離間する方向に広がるように設けられている傾斜面を有する、請求項2~4のいずれか1項に記載のワイヤロープ検査装置。 - 前記通常運転位置に配置された状態の前記検知部を固定する固定部をさらに備える、請求項1~5のいずれか1項に記載のワイヤロープ検査装置。
- 検査対象であるワイヤロープに対して磁束を印加する励磁部と、
前記励磁部により磁束が印加される前記ワイヤロープの磁束を検知する検知部と、
前記ワイヤロープの検査を行う検査運転時に前記検知部が配置される検査位置まで、前記ワイヤロープに近接する方向に前記検知部を弾性力により付勢する付勢部と、
通常運転時に前記検知部が配置される通常運転位置まで、前記ワイヤロープから離間する方向に前記検知部を移動させる駆動部と、を備え、
前記検知部が前記付勢部に付勢されることによって前記ワイヤロープに近接する方向に移動する際に、前記検知部の移動速度を減衰させる減衰部をさらに備える、ワイヤロープ検査装置。 - 前記駆動部は、電流により磁場を発生させることによって前記検知部を前記ワイヤロープから離間する方向に移動させるソレノイド式駆動部を含み、
前記減衰部は、前記検知部が前記付勢部に付勢されることによって前記ワイヤロープに近接する方向に移動する際に、内部に充填された流体の粘性抵抗によって前記検知部の移動速度を減衰させるダンパ部を含む、請求項7に記載のワイヤロープ検査装置。 - 歯部を有するとともに直線状に延びるラック部をさらに備え、
前記ダンパ部は、前記ラック部の前記歯部と噛み合いながら回転する歯車部を有するとともに、前記歯車部の回転速度を減衰させるように構成されており、
前記ラック部は、一端が前記検知部に固定されているとともに、他端が前記ダンパ部の前記歯車部と噛み合うように構成されている、請求項8に記載のワイヤロープ検査装置。 - 前記駆動部は、一の回転方向に回転することによって、前記検知部を前記ワイヤロープから離間する方向に移動させるモータを含み、
前記モータは、速度制御可能に構成されており、前記検知部が前記付勢部に付勢されることによって前記ワイヤロープに近接する方向に移動する際に、前記一の回転方向と反対の他の回転方向に速度を制限しながら回転することによって、前記検知部の移動速度を減衰させる前記減衰部を兼ねる、請求項7に記載のワイヤロープ検査装置。 - 前記モータの回転軸に接続されているワンウェイクラッチをさらに備え、
前記ワンウェイクラッチは、前記モータが前記検知部に対して前記ワイヤロープから離間する方向に駆動力を加えている場合には、前記モータの回転軸と共に回転し、前記モータが前記検知部に対して前記ワイヤロープに近接する方向に駆動力を加えている場合には、前記モータの回転軸に対して空転するように構成されている、請求項10に記載のワイヤロープ検査装置。 - 前記検知部が前記通常運転位置に配置されていることを検知する位置検知部をさらに備える、請求項1~11のいずれか1項に記載のワイヤロープ検査装置。
- 前記検知部は、エレベータに設けられている前記ワイヤロープが前記エレベータの駆動によって前記ワイヤロープの延びる方向に沿って移動している状態において、移動している前記ワイヤロープの磁束を検知するように構成されており、
前記付勢部は、前記検知部に対する前記ワイヤロープの移動速度が比較的小さい前記エレベータの検査運転時に前記検知部が配置される前記検査位置まで、前記検知部を付勢するように構成されており、
前記駆動部は、前記検知部に対する前記ワイヤロープの移動速度が比較的大きい前記エレベータの通常運転時に前記検知部が配置される前記通常運転位置まで、前記検知部を移動させるように構成されている、請求項1~12のいずれか1項に記載のワイヤロープ検査装置。 - 前記ワイヤロープに対して予め磁界を印加し前記ワイヤロープの磁化の方向を整える磁界印加部をさらに備え、
前記励磁部は、前記磁界印加部によって予め磁界が印加された後に、前記ワイヤロープの磁化の状態を励振する励振コイルを含み、
前記検知部は、前記ワイヤロープの延びる方向に沿って前記ワイヤロープの周りに巻回され、前記励振コイルによって磁化の状態が励振される前記ワイヤロープの磁束を全磁束法によって検知する検知コイルを含み、
前記付勢部は、前記検査位置まで前記検知コイルを弾性力により付勢するように構成されており、
前記駆動部は、前記通常運転位置まで前記検知コイルを移動させるように構成されている、請求項1~13のいずれか1項に記載のワイヤロープ検査装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021135610A JP7652012B2 (ja) | 2021-08-23 | 2021-08-23 | ワイヤロープ検査装置 |
| EP22169880.6A EP4141436B1 (en) | 2021-08-23 | 2022-04-26 | Wire rope inspection device |
| US17/752,465 US20230053507A1 (en) | 2021-08-23 | 2022-05-24 | Wire rope inspection device |
| CN202210849534.6A CN115893153A (zh) | 2021-08-23 | 2022-07-19 | 钢丝绳检查装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021135610A JP7652012B2 (ja) | 2021-08-23 | 2021-08-23 | ワイヤロープ検査装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023030460A JP2023030460A (ja) | 2023-03-08 |
| JP7652012B2 true JP7652012B2 (ja) | 2025-03-27 |
Family
ID=81386931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021135610A Active JP7652012B2 (ja) | 2021-08-23 | 2021-08-23 | ワイヤロープ検査装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20230053507A1 (ja) |
| EP (1) | EP4141436B1 (ja) |
| JP (1) | JP7652012B2 (ja) |
| CN (1) | CN115893153A (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7521435B2 (ja) * | 2021-01-19 | 2024-07-24 | 株式会社プロテリアル | トルクセンサ及びトルク検出装置 |
| CN120717309B (zh) * | 2025-09-01 | 2025-12-12 | 中城绿脉(湖北)检测有限公司 | 一种钢丝绳断丝电磁检测装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009155020A (ja) | 2007-12-26 | 2009-07-16 | Mitsubishi Electric Building Techno Service Co Ltd | ロープ走行点検装置およびそれを備えるロープ破断検出装置 |
| JP2010210272A (ja) | 2009-03-06 | 2010-09-24 | Hitachi Building Systems Co Ltd | ワイヤーロープの探傷装置 |
| WO2011148456A1 (ja) | 2010-05-25 | 2011-12-01 | 三菱電機株式会社 | ワイヤロープ探傷装置 |
| US20130147471A1 (en) | 2011-12-07 | 2013-06-13 | Ndt Technologies, Inc. | Magnetic inspection device and method |
| WO2015166533A1 (ja) | 2014-04-28 | 2015-11-05 | 東京製綱株式会社 | ワイヤロープの検査装置 |
| JP2019015656A (ja) | 2017-07-10 | 2019-01-31 | 株式会社島津製作所 | 磁性体の検査装置 |
| JP2019214457A (ja) | 2018-06-13 | 2019-12-19 | フジテック株式会社 | ロープテスタ支持具及びロープテスタ装置 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5038387U (ja) * | 1973-07-31 | 1975-04-21 | ||
| JPS59195561U (ja) * | 1983-06-13 | 1984-12-26 | 東京製綱株式会社 | エレベ−タ用ロ−プ探傷装置 |
| JP2005154042A (ja) * | 2003-11-21 | 2005-06-16 | Toshiba Elevator Co Ltd | エレベータ用ワイヤロープ探傷装置 |
| JP4415041B2 (ja) * | 2007-10-10 | 2010-02-17 | 三菱電機ビルテクノサービス株式会社 | ロープ点検方法 |
| WO2009063548A1 (ja) * | 2007-11-13 | 2009-05-22 | Mitsubishi Electric Corporation | ロープテスタ装置 |
| KR101199653B1 (ko) * | 2007-11-13 | 2012-11-08 | 미쓰비시덴키 가부시키가이샤 | 로프 검사 장치 |
| JP5243489B2 (ja) * | 2010-06-07 | 2013-07-24 | 株式会社日立ビルシステム | ワイヤロープの探傷装置 |
| CN103344698B (zh) * | 2013-06-19 | 2015-03-11 | 华中科技大学 | 一种钢丝绳在线漏磁检测探头 |
| FI126173B (en) * | 2013-11-12 | 2016-07-29 | Konecranes Global Oy | Condition monitoring of an object having an elongated iron-containing longitudinal axis |
| US20150239708A1 (en) * | 2014-02-25 | 2015-08-27 | Thyssenkrupp Elevator Ag | System and Method for Monitoring a Load Bearing Member |
| CN104502445A (zh) * | 2014-12-02 | 2015-04-08 | 西安博深煤矿安全科技有限公司 | 一种钢丝绳探伤用自动夹持装置 |
| DE112016003574B4 (de) * | 2015-08-06 | 2023-06-15 | Mitsubishi Electric Corporation | Drathseildefekt-detektor |
| KR102180650B1 (ko) * | 2016-12-13 | 2020-11-19 | 미쓰비시덴키 가부시키가이샤 | 와이어 로프 탐상 장치 |
| WO2018109824A1 (ja) * | 2016-12-13 | 2018-06-21 | 東京製綱株式会社 | ワイヤロープの損傷検出方法,ならびにワイヤロープの損傷検出に用いられる信号処理装置および損傷検出装置 |
| JP6956616B2 (ja) * | 2017-12-12 | 2021-11-02 | 東京製綱株式会社 | ロープテスタ,ワイヤロープ解析装置およびその制御プログラム |
| CN111542753B (zh) * | 2018-02-01 | 2024-01-30 | 株式会社岛津制作所 | 钢缆检查装置、钢缆检查系统以及钢缆检查方法 |
| CN111684276B (zh) | 2018-03-08 | 2023-12-08 | 株式会社岛津制作所 | 磁性体检查装置 |
| CN113784907B (zh) * | 2019-06-05 | 2023-04-28 | 株式会社岛津制作所 | 钢丝绳检查系统和钢丝绳检查方法 |
| DE102019004240B4 (de) * | 2019-06-18 | 2024-04-25 | Mike Pfennig | Gerät zur Prüfung von Stahldrahtseilen und Verfahren zu dessen Anwendung |
| JP6766230B1 (ja) * | 2019-06-28 | 2020-10-07 | 東芝エレベータ株式会社 | ワイヤロープ検査装置及びエレベータ |
| JP7491386B2 (ja) * | 2020-09-10 | 2024-05-28 | 株式会社島津製作所 | ワイヤロープ検査装置、ワイヤロープ検査システム、および、ワイヤロープ検査方法 |
| CN116075719A (zh) * | 2020-09-10 | 2023-05-05 | 株式会社岛津制作所 | 钢丝绳检查装置和钢丝绳检查系统 |
| WO2022118494A1 (ja) * | 2020-12-04 | 2022-06-09 | 株式会社島津製作所 | ワイヤロープ検査装置、および、ワイヤロープ検査システム |
| JP7448037B2 (ja) * | 2020-12-04 | 2024-03-12 | 株式会社島津製作所 | ワイヤロープ検査装置、および、ワイヤロープ検査システム |
| JP7533391B2 (ja) * | 2021-07-15 | 2024-08-14 | 株式会社島津製作所 | ワイヤロープ検査システム、および、ワイヤロープ検査システムの位置決め方法 |
| JP7582132B2 (ja) * | 2021-09-03 | 2024-11-13 | 株式会社島津製作所 | ワイヤロープ検査方法、ワイヤロープ検査システム、および、ワイヤロープ検査装置 |
| JP7768022B2 (ja) * | 2022-04-19 | 2025-11-12 | 株式会社島津製作所 | ワイヤロープ検査装置 |
| JP2025040333A (ja) * | 2023-09-11 | 2025-03-24 | 株式会社島津製作所 | ワイヤロープ検査装置の位置決め方法、ワイヤロープ検査装置の位置決め部材およびワイヤロープ検査装置 |
-
2021
- 2021-08-23 JP JP2021135610A patent/JP7652012B2/ja active Active
-
2022
- 2022-04-26 EP EP22169880.6A patent/EP4141436B1/en active Active
- 2022-05-24 US US17/752,465 patent/US20230053507A1/en active Pending
- 2022-07-19 CN CN202210849534.6A patent/CN115893153A/zh active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009155020A (ja) | 2007-12-26 | 2009-07-16 | Mitsubishi Electric Building Techno Service Co Ltd | ロープ走行点検装置およびそれを備えるロープ破断検出装置 |
| JP2010210272A (ja) | 2009-03-06 | 2010-09-24 | Hitachi Building Systems Co Ltd | ワイヤーロープの探傷装置 |
| WO2011148456A1 (ja) | 2010-05-25 | 2011-12-01 | 三菱電機株式会社 | ワイヤロープ探傷装置 |
| US20130147471A1 (en) | 2011-12-07 | 2013-06-13 | Ndt Technologies, Inc. | Magnetic inspection device and method |
| WO2015166533A1 (ja) | 2014-04-28 | 2015-11-05 | 東京製綱株式会社 | ワイヤロープの検査装置 |
| JP2019015656A (ja) | 2017-07-10 | 2019-01-31 | 株式会社島津製作所 | 磁性体の検査装置 |
| JP2019214457A (ja) | 2018-06-13 | 2019-12-19 | フジテック株式会社 | ロープテスタ支持具及びロープテスタ装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115893153A (zh) | 2023-04-04 |
| EP4141436B1 (en) | 2025-06-04 |
| JP2023030460A (ja) | 2023-03-08 |
| US20230053507A1 (en) | 2023-02-23 |
| EP4141436A1 (en) | 2023-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7652012B2 (ja) | ワイヤロープ検査装置 | |
| JP5031528B2 (ja) | ワイヤーロープの探傷装置 | |
| JP5150454B2 (ja) | エレベーターロープ診断装置 | |
| WO2015128242A1 (en) | System and method for monitoring a load bearing member | |
| CN101778791A (zh) | 具有承载机构状态检测装置的电梯系统和用于检测承载机构的状态的方法 | |
| JP5023112B2 (ja) | エレベーター | |
| WO2015194629A1 (ja) | 非破壊検査装置 | |
| JP6784278B2 (ja) | ロープテスタ装置 | |
| US20190086369A1 (en) | Rope damage diagnostic testing apparatus | |
| CN114459989B (zh) | 一种电梯钢带内外部摩擦滑移模拟试验装置及方法 | |
| CN110944923A (zh) | 电梯带位置跟踪系统 | |
| JP7533391B2 (ja) | ワイヤロープ検査システム、および、ワイヤロープ検査システムの位置決め方法 | |
| JP7448037B2 (ja) | ワイヤロープ検査装置、および、ワイヤロープ検査システム | |
| JP2025040333A (ja) | ワイヤロープ検査装置の位置決め方法、ワイヤロープ検査装置の位置決め部材およびワイヤロープ検査装置 | |
| JP2010160068A (ja) | ワイヤーロープの探傷装置の校正装置 | |
| WO2010098756A1 (en) | Elevator inspection system | |
| JP7491386B2 (ja) | ワイヤロープ検査装置、ワイヤロープ検査システム、および、ワイヤロープ検査方法 | |
| CN101233066B (zh) | 电梯装置 | |
| JP7768022B2 (ja) | ワイヤロープ検査装置 | |
| JP5210532B2 (ja) | 簡易ロープ異常検知装置 | |
| WO2022118494A1 (ja) | ワイヤロープ検査装置、および、ワイヤロープ検査システム | |
| JP5129014B2 (ja) | ワイヤーロープの探傷装置 | |
| JP2014234267A (ja) | エスカレータの軸受診断装置 | |
| JP7491244B2 (ja) | ワイヤロープ検査装置およびワイヤロープ検査システム | |
| JP2017218265A (ja) | エレベーターのロープ診断装置およびロープ診断方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241017 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250123 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250225 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7652012 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |