JP7580997B2 - 把持物挿入装置及び方法 - Google Patents
把持物挿入装置及び方法 Download PDFInfo
- Publication number
- JP7580997B2 JP7580997B2 JP2020161904A JP2020161904A JP7580997B2 JP 7580997 B2 JP7580997 B2 JP 7580997B2 JP 2020161904 A JP2020161904 A JP 2020161904A JP 2020161904 A JP2020161904 A JP 2020161904A JP 7580997 B2 JP7580997 B2 JP 7580997B2
- Authority
- JP
- Japan
- Prior art keywords
- hole
- reaction force
- gripped
- unit
- insertion device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Landscapes
- Manipulator (AREA)
Description
前記把持物駆動部を制御する制御部と、前記把持物が前記挿入対象物から受ける反力を検出する反力検出部と、前記反力検出部が検出した信号に基づいて前記把持物が前記穴の中心に向かう方向を演算する演算部と、を備え、
前記演算部は、前記反力検出部で検出された前記反力が予め定められた閾値を超えた際に、前記反力検出部で検出された前記反力の向きが前記穴の中心に向かう方向を演算し、前記制御部は、前記演算部で演算した結果に基づき、前記把持物を前記穴に挿入するように前記把持物駆動部を制御することを特徴とする。
前記把持物が前記挿入対象物から受ける反力を反力検出部で検出し、前記反力検出部で検出された前記反力が予め定められた閾値を超えた際に、前記反力検出部で検出された前記反力の向きが前記穴の中心に向かう方向を演算部で演算し、前記演算部で演算した結果に基づき、前記把持物を前記穴に挿入するように制御部で前記把持物駆動部を制御することを特徴とする。






Claims (16)
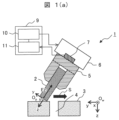
- 把持物駆動部に把持された把持物を挿入対象物に押し当てながら走査させ、前記挿入対象物に形成された断面が円形の穴を探索し、前記把持物が前記穴に前記把持物駆動部により挿入される把持物挿入装置であって、
前記把持物駆動部を制御する制御部と、前記把持物が前記挿入対象物から受ける反力を検出する反力検出部と、前記反力検出部が検出した信号に基づいて前記把持物が前記穴の中心に向かう方向を演算する演算部と、を備え、
前記演算部は、前記反力検出部で検出された前記反力が予め定められた閾値を超えた際に、前記反力検出部で検出された前記反力の向きが前記穴の中心に向かう方向を演算し、前記制御部は、前記演算部で演算した結果に基づき、前記把持物を前記穴に挿入するように前記把持物駆動部を制御することを特徴とする把持物挿入装置。 - 請求項1に記載の把持物挿入装置であって、
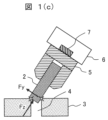
前記制御部は、前記把持物を前記挿入対象物の表面に対してθ角度傾けた状態で、前記挿入対象物の表面を走査するように前記把持物駆動部を制御することを特徴とする把持物挿入装置。 - 請求項2に記載の把持物挿入装置であって、
前記把持物を前記挿入対象物の表面に対してθ角度傾けた状態で走査し、前記反力検出部で検出された前記反力が予め定められた閾値を超えた後に、前記把持物の底部が前記穴の形成方向となるように、前記把持物と前記穴の接触点を中心に前記把持物を回転させることを特徴とする把持物挿入装置。 - 請求項3に記載の把持物挿入装置であって、
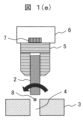
前記把持物の底部を前記穴の形成方向に向くように前記把持物を回転させた後に、前記穴の形成方向にさらに前記把持物を押し付け、前記把持物を前記穴の縁の3点に接触させることを特徴とする把持物挿入装置。 - 請求項4に記載の把持物挿入装置であって、
前記穴の縁と前記把持物の3点の接触点と、前記穴と前記把持物の寸法との座標系により、前記穴の中心位置を求めることを特徴とする把持物挿入装置。 - 請求項1に記載の把持物挿入装置であって、
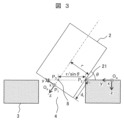
前記穴の入り口がテーパ状に形成されており、前記入り口がテーパ状に形成された前記穴の軸方向に平行な状態で前記把持物を前記挿入対象物に押し付け、
前記制御部は、前記反力検出部で検出された前記反力が予め定められた閾値以内の場合は、前記挿入対象物を押し付ける位置を変更するように前記把持物駆動部を制御することを特徴とする把持物挿入装置。 - 請求項6に記載の把持物挿入装置であって、
前記穴の探索方向に前記把持物を移動する前に前記穴の軸方向の前記穴から離れた初期位置に前記把持物を引き込み、前記穴の探索方向の次のステップに前記把持物を移動してから前記把持物を前記挿入対象物の方向に押し付けることを特徴とする把持物挿入装置。 - 請求項7に記載の把持物挿入装置であって、
前記初期位置から前記把持物を前記挿入対象物に接触した位置までの移動距離を演算する移動距離演算手段と、
前記移動距離演算手段で演算した移動距離により、前記穴への接近有無の判断及び/又は前記穴に近づいていることの認識、前記穴から離れていることの判定を行う穴近接度判定手段と、
前記穴近接度判定手段の判定により、前記穴の探索のための進行移動量を調整する進行移動量調整手段と、を更に備えていることを特徴とする把持物挿入装置。 - 請求項1乃至8のいずれか1項に記載の把持物挿入装置であって、
前記挿入対象物はワーク、前記把持物駆動部はロボット及びロボットハンド、前記反力検出部は力覚センサであり、
前記演算部は、前記力覚センサで検出された反力が予め定められた閾値を超えた際に、前記力覚センサで検出された前記反力の向きが前記ワークに形成された前記把持物が前記穴の中心に向かう方向を演算し、前記制御部は、前記演算部で演算した結果に基づき、前記把持物を前記穴に挿入するように前記ロボット及びロボットハンドを制御することを特徴とする把持物挿入装置。 - 把持物駆動部に把持された把持物を挿入対象物に押し当てながら走査させ、前記挿入対象物に形成された断面が円形の穴を探索し、前記把持物が前記穴に前記把持物駆動部により挿入される把持物挿入方法であって、
前記把持物が前記挿入対象物から受ける反力を反力検出部で検出し、前記反力検出部で検出された前記反力が予め定められた閾値を超えた際に、前記反力検出部で検出された前記反力の向きが、前記把持物が前記穴の中心に向かう方向を演算部で演算し、前記演算部で演算した結果に基づき、前記把持物を前記穴に挿入するように制御部で前記把持物駆動部を制御することを特徴とする把持物挿入方法。 - 請求項10に記載の把持物挿入方法であって、
前記把持物を前記挿入対象物の表面に対してθ角度傾けた状態で、前記挿入対象物の表面を走査するように前記制御部で前記把持物駆動部を制御することを特徴とする把持物挿入方法。 - 請求項11に記載の把持物挿入方法であって、
前記把持物を前記挿入対象物の表面に対してθ角度傾けた状態で走査し、前記反力検出部で検出された前記反力が予め定められた閾値を超えた後に、前記把持物の底部が前記穴の形成方向となるように、前記把持物と前記穴の接触点を中心に前記把持物を回転させることを特徴とする把持物挿入方法。 - 請求項12に記載の把持物挿入方法であって、
前記把持物の底部を前記穴の形成方向に向くように前記把持物を回転させた後に、前記穴の形成方向にさらに前記把持物を押し付け、前記把持物を前記穴の縁の3点に接触させ、前記穴の縁と前記把持物の3点の接触点と、前記穴と前記把持物の寸法との座標系により、前記穴の中心位置を求めることを特徴とする把持物挿入方法。 - 請求項10に記載の把持物挿入方法であって、
前記穴の入り口がテーパ状に形成されており、前記入り口がテーパ状に形成された前記穴の軸方向に平行な状態で前記把持物を前記挿入対象物に押し付け、
前記反力検出部で検出された前記反力が予め定められた閾値以内の場合は、前記挿入対象物を押し付ける位置を変更するように制御部で前記把持物駆動部を制御することを特徴とする把持物挿入方法。 - 請求項14に記載の把持物挿入方法であって、
前記穴の探索方向に前記把持物を移動する前に前記穴の軸方向の前記穴から離れた初期位置に前記把持物を引き込み、前記穴の探索方向の次のステップに前記把持物を移動してから前記把持物を前記挿入対象物の方向に押し付けることを特徴とする把持物挿入方法。 - 請求項10至15のいずれか1項に記載の把持物挿入方法であって、
前記挿入対象物はワーク、前記把持物駆動部はロボット及びロボットハンド、前記反力検出部は力覚センサであり、
前記把持物が前記ワークから受ける反力を検出する前記力覚センサで検出した信号に基づいて前記演算部により、前記力覚センサで検出された前記反力が予め定められた閾値を超えた際に、前記力覚センサで検出された前記反力の向きが、前記把持物が前記穴の中心に向かう方向を演算し、前記演算部で演算した結果に基づき、前記把持物を前記穴に挿入するように制御部で前記ロボット及びロボットハンドを制御することを特徴とする把持物挿入方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020161904A JP7580997B2 (ja) | 2020-09-28 | 2020-09-28 | 把持物挿入装置及び方法 |
| CN202110993459.6A CN114310978B (zh) | 2020-09-28 | 2021-08-27 | 夹持物插入装置和方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020161904A JP7580997B2 (ja) | 2020-09-28 | 2020-09-28 | 把持物挿入装置及び方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022054725A JP2022054725A (ja) | 2022-04-07 |
| JP7580997B2 true JP7580997B2 (ja) | 2024-11-12 |
Family
ID=80997610
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020161904A Active JP7580997B2 (ja) | 2020-09-28 | 2020-09-28 | 把持物挿入装置及び方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7580997B2 (ja) |
| CN (1) | CN114310978B (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008221387A (ja) | 2007-03-12 | 2008-09-25 | Ihi Corp | 組立方法及び組立装置 |
| JP2013107175A (ja) | 2011-11-22 | 2013-06-06 | Canon Inc | 組立ロボット |
| JP2014155994A (ja) | 2013-02-18 | 2014-08-28 | Seiko Epson Corp | ロボットおよびロボット制御装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61208514A (ja) * | 1985-03-13 | 1986-09-16 | Amada Co Ltd | マニピユレ−タの制御方法 |
| JPH05108108A (ja) * | 1991-05-10 | 1993-04-30 | Nok Corp | コンプライアンス制御方法及び制御装置 |
| JP2009061550A (ja) * | 2007-09-06 | 2009-03-26 | Yaskawa Electric Corp | 組み立て作業ロボットの制御方法および制御装置 |
| JP2010099784A (ja) * | 2008-10-24 | 2010-05-06 | Honda Motor Co Ltd | ピン嵌合方法及びピン引き抜き方法 |
| EP2896487A1 (en) * | 2012-09-04 | 2015-07-22 | Kabushiki Kaisha Yaskawa Denki | Method for adjusting robot control parameters, robot system, and robot control device |
| JP2015160292A (ja) * | 2014-02-28 | 2015-09-07 | セイコーエプソン株式会社 | ロボット制御装置、ロボットおよびロボット制御方法 |
| JP6192599B2 (ja) * | 2014-06-19 | 2017-09-06 | 三菱電機株式会社 | ロボット制御装置および制御方法 |
| JP6460690B2 (ja) * | 2014-09-16 | 2019-01-30 | キヤノン株式会社 | ロボット装置、ロボット制御方法、プログラム及び記録媒体 |
| JP2017196705A (ja) * | 2016-04-28 | 2017-11-02 | セイコーエプソン株式会社 | ロボット、及びロボットシステム |
| JP2019160973A (ja) * | 2018-03-12 | 2019-09-19 | オムロン株式会社 | 部品挿入装置、部品挿入方法、およびプログラム |
| CN110076780B (zh) * | 2019-05-30 | 2021-04-30 | 中国科学院自动化研究所 | 基于视觉和力反馈位姿调节的机器人装配方法及系统 |
-
2020
- 2020-09-28 JP JP2020161904A patent/JP7580997B2/ja active Active
-
2021
- 2021-08-27 CN CN202110993459.6A patent/CN114310978B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008221387A (ja) | 2007-03-12 | 2008-09-25 | Ihi Corp | 組立方法及び組立装置 |
| JP2013107175A (ja) | 2011-11-22 | 2013-06-06 | Canon Inc | 組立ロボット |
| JP2014155994A (ja) | 2013-02-18 | 2014-08-28 | Seiko Epson Corp | ロボットおよびロボット制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022054725A (ja) | 2022-04-07 |
| CN114310978A (zh) | 2022-04-12 |
| CN114310978B (zh) | 2024-02-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2710850B2 (ja) | ワーク把持装置、ワーク及びその収納ケース | |
| JP4098761B2 (ja) | 仕上げ加工方法 | |
| CN105856216B (zh) | 工件取出机器人系统以及工件取出方法 | |
| EP2037211B1 (en) | Surface shape measuring device, and surface shape measuring method | |
| US20080181485A1 (en) | System and method of identifying objects | |
| US20150217451A1 (en) | Robot, robot system, control device, and control method | |
| JP2019126895A (ja) | ロボット制御装置及びロボットシステム | |
| CN109422137B (zh) | 用于工字轮的夹具 | |
| US12036069B2 (en) | Ultrasonic diagnosis system | |
| KR20210029691A (ko) | 웨이퍼 프리-얼라이너 및 웨이퍼 사전 정렬 방법 | |
| US8112177B2 (en) | Wafer position teaching method and teaching tool | |
| US9677876B2 (en) | Non-destructive and optical measurement automation system for web thickness of microdrills and method thereof | |
| JP7580997B2 (ja) | 把持物挿入装置及び方法 | |
| CN112297002B (zh) | 进行多点嵌合的机器人控制系统 | |
| US12005539B2 (en) | Self-detecting apparatus for workpiece-origin, mobile machine tool having the same, and method for self-detecting workpiece-origin of mobile machine tool using the mobile machine | |
| JP2003136465A (ja) | 検出対象物の3次元位置・姿勢決定方法とロボット用視覚センサ | |
| CN111179221B (zh) | 焊接坡口的检测方法、设备及存储介质 | |
| CN112388264A (zh) | 寻孔方法及寻孔装置 | |
| US20250039524A1 (en) | Multi-task device comprising a camera and a single spindle for placing the camera in a focussing position | |
| JP3151790B2 (ja) | 溶接開先・ビードの中心位置検出方法及び装置 | |
| JP3375242B2 (ja) | ロボットの物体認識方法及びその装置 | |
| JP3382787B2 (ja) | 溶接位置検出装置および方法 | |
| JPH10118976A (ja) | 画像取込み位置設定方法および設定装置 | |
| JP2802187B2 (ja) | 鋼材切断部のバリ除去方法および除去装置 | |
| JP6977640B2 (ja) | 加工装置及び加工方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231019 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231205 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240131 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240521 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240716 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241022 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241030 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7580997 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |