JP7364644B2 - レンズ駆動装置 - Google Patents
レンズ駆動装置 Download PDFInfo
- Publication number
- JP7364644B2 JP7364644B2 JP2021179777A JP2021179777A JP7364644B2 JP 7364644 B2 JP7364644 B2 JP 7364644B2 JP 2021179777 A JP2021179777 A JP 2021179777A JP 2021179777 A JP2021179777 A JP 2021179777A JP 7364644 B2 JP7364644 B2 JP 7364644B2
- Authority
- JP
- Japan
- Prior art keywords
- circuit board
- housing
- bobbin
- magnet
- coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 claims description 63
- 238000006073 displacement reaction Methods 0.000 claims description 56
- 230000002093 peripheral effect Effects 0.000 claims description 46
- 230000003993 interaction Effects 0.000 claims description 5
- 229910000679 solder Inorganic materials 0.000 claims 1
- 230000008859 change Effects 0.000 description 20
- 238000005192 partition Methods 0.000 description 18
- 239000000853 adhesive Substances 0.000 description 13
- 230000001070 adhesive effect Effects 0.000 description 13
- 230000005415 magnetization Effects 0.000 description 13
- 238000000034 method Methods 0.000 description 13
- 230000008878 coupling Effects 0.000 description 11
- 238000010168 coupling process Methods 0.000 description 11
- 238000005859 coupling reaction Methods 0.000 description 11
- 238000005476 soldering Methods 0.000 description 10
- 239000004593 Epoxy Substances 0.000 description 8
- 230000000052 comparative effect Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 7
- 239000000463 material Substances 0.000 description 6
- 230000006641 stabilisation Effects 0.000 description 6
- 238000011105 stabilization Methods 0.000 description 6
- 238000007789 sealing Methods 0.000 description 5
- 238000003702 image correction Methods 0.000 description 4
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- 238000013075 data extraction Methods 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 239000010408 film Substances 0.000 description 3
- 239000000696 magnetic material Substances 0.000 description 3
- 230000000149 penetrating effect Effects 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 239000011889 copper foil Substances 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 230000010355 oscillation Effects 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 229910000828 alnico Inorganic materials 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 235000012489 doughnuts Nutrition 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000005672 electromagnetic field Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 230000010399 physical interaction Effects 0.000 description 1
- 229910052761 rare earth metal Inorganic materials 0.000 description 1
- 150000002910 rare earth metals Chemical class 0.000 description 1
- 239000003381 stabilizer Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 239000012780 transparent material Substances 0.000 description 1
- 229910000859 α-Fe Inorganic materials 0.000 description 1
Images


























































Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/09—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted for automatic focusing or varying magnification
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/646—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image compensating for small deviations, e.g. due to vibration or shake
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K33/00—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system
- H02K33/18—Motors with reciprocating, oscillating or vibrating magnet, armature or coil system with coil systems moving upon intermittent or reversed energisation thereof by interaction with a fixed field system, e.g. permanent magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/035—DC motors; Unipolar motors
- H02K41/0352—Unipolar motors
- H02K41/0354—Lorentz force motors, e.g. voice coil motors
- H02K41/0356—Lorentz force motors, e.g. voice coil motors moving along a straight path
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M1/00—Substation equipment, e.g. for use by subscribers
- H04M1/02—Constructional features of telephone sets
- H04M1/0202—Portable telephone sets, e.g. cordless phones, mobile phones or bar type handsets
- H04M1/026—Details of the structure or mounting of specific components
- H04M1/0264—Details of the structure or mounting of specific components for a camera module assembly
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Power Engineering (AREA)
- Signal Processing (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Chemical & Material Sciences (AREA)
- Adjustment Of Camera Lenses (AREA)
- Lens Barrels (AREA)
- Studio Devices (AREA)
- Reciprocating, Oscillating Or Vibrating Motors (AREA)
Description
された携帯電話又はスマートフォンが開発されている。一般に、カメラモジュールは、レ
ンズ、イメージセンサーモジュール、及びレンズとイメージセンサーモジュールの間の間
隔を調節するボイスコイルモーター(Voice Coil Motor、VCM)を含む
ことができる。
ことがあり、このような手振れによって所望のイメージ又は動画を撮影することができな
い。
振れ補正(Optical Image Stabilizer、OIS)機能を付け加え
たボイスコイルモーターが開発されている。
位置を正確に把握して制御することができるレンズ駆動装置を提供する。
し、前記マグネットと前記第1コイルの間の電磁気的相互作用によって前記ハウジングの
内部で光軸に平行な第1方向に移動するボビン;前記ボビン及び前記ハウジングと結合す
る弾性部材;前記弾性部材と電気的に連結される第1回路基板;前記ハウジングの下側に
配置される第2回路基板;前記第2回路基板上に配置される第2コイル;及び前記第1回
路基板と前記第2回路基板を電気的に連結するかあるいは前記弾性部材と前記第2回路基
板を電気的に連結する支持部材を含む。
する上側弾性部材;及び前記ボビンの下部及び前記ハウジングの下部と結合する下側弾性
部材を含むことができる。
ら折り曲げられ、複数の第1端子を備える第1端子面;及び前記第1上面上に配置され、
前記支持部材の一端が電気的に連結される第1パッドを含むことができる。
に配置され、前記支持部材の他端が電気的に連結される第2パッドを含むことができる。
れ、前記第1コイルを支持する複数の支持部;及び前記上端部の角部に形成される貫通溝
を含むことができ、前記支持部材は前記貫通溝を通過することができる。
れ、前記第1コイルを支持する複数の支持部;及び前記上端部の角部に形成される貫通溝
を含み、前記支持部材は前記貫通溝を通過することができる。
第2上面部は前記第1角部領域と対応する1個以上の第2角部領域を含み、前記複数の支
持部材の少なくとも一つは前記第1角部領域及び前記対応する前記第2角部領域の間に配
置され、前記第1角部領域は前記第1回路基板の第1上面の角部から既設定の距離以内の
領域であり、前記第2角部領域は前記第2回路基板の第2上面から既設定の距離以内の領
域であってもよい。
置から光軸に平行な第1方向に上昇又は下降することができる。
第1コイルが取り付けられ、前記第1マグネットと前記第1コイルの間の電磁気的相互作
用によって前記ハウジングの内部で第1方向に移動するボビン;前記ボビン及び前記ハウ
ジングと結合する上側及び下側弾性部材;前記上側弾性部材と電気的に連結される第1回
路基板;前記ハウジングの下側に配置される第2回路基板;前記第2回路基板上に配置さ
れる第2コイル;前記第1回路基板と前記第2回路基板を電気的に連結するかあるいは前
記弾性部材と前記第2回路基板を電気的に連結する弾性支持部材;及び前記弾性支持部材
の一部に配置される第1ダンパーを含む。
分に設けられる第2ダンパーをさらに含むことができる。
れ、前記第1コイルを支持する複数の支持部;及び前記上端部の角部に形成され、前記支
持部材が通過する貫通溝を含むことができ、前記レンズ駆動装置は、前記ハウジングの前
記貫通溝と前記弾性支持部材の間に設けられる第3ダンパーをさらに含むことができる。
レーム;前記ハウジングと連結される外側フレーム;及び前記内側フレームと前記外側フ
レームを連結する連結部を含み、前記レンズ駆動装置は、前記内側フレームと前記ハウジ
ングの間に設けられる第4ダンパーをさらに含むことができる。
なくとも一つのレンズが装着され、外周面に第1コイルが取り付けられ、前記第1マグネ
ットと前記第1コイルの間の電磁気的相互作用によって前記ハウジングの内部で第1方向
に移動するボビン;前記ボビンの外周面上に配置される第2マグネット;前記ボビンの位
置を感知する第1位置センサー;前記ボビン及び前記ハウジングと結合する上側及び下側
弾性部材;前記上側弾性部材と電気的に連結される第1回路基板;前記ハウジングの下側
に配置される第2回路基板;前記第2回路基板上に配置される第2コイル;及び前記第1
回路基板と前記第2回路基板を電気的に連結するかあるいは前記弾性部材と前記第2回路
基板を電気的に連結する弾性支持部材を含み、前記第2マグネットは前記第1位置センサ
ーと対向して配置される両極着磁マグネットである。
;及び前記第1位置センサーと向き合い、前記光軸方向に平行な方向に前記第1側面から
離隔するかあるいは接するように配置され、前記第1側面と反対の第2極性を有する第2
側面を含み、前記第1側面の前記光軸方向への長さは前記第2側面の前記光軸方向への長
さ以上であってもよい。
ト;及び前記第1及び第2センシング用マグネットの間に配置される非磁性体隔壁を含む
ことができる。
て配置されるかあるいは前記光軸に垂直な方向に互いに離隔して配置されることができる
。
10%以上又は50%以下であってもよい。
期状態で、前記第1位置センサーの中心の高さは前記第1側面の上端部から前記着磁方向
に伸びた仮想の水平面の高さと同一であってもよく、前記仮想の水平面の高さより高くて
もよい。
に把握して制御することができる。
施例の説明において、各層(膜)、領域、パターン又は構造物が基板、各層(膜)、領域
、パッド又はパターンの“上(on)”に又は”下(under)”に形成されると記載
される場合、“上(on)”と“下(under)”は“直接(directly)”又
は“他の層を介して(indirectly)”形成されることを全て含む。また、各層
の上又は下に対する基準は図面を基準として説明する。
あるいは概略的に示されている。また、各構成要素の大きさは実際の大きさをそのまま反
映するものではない。また、同一の参照番号は図面の説明の全般にわたって同一の要素を
示す。
適用される手振れ補正装置とは、静止画像の撮影時に使用者の手振れに起因した振動によ
って、撮影されたイメージの外郭線がはっきりと形成できないことを防止するように構成
された装置を意味する。
に結像させる装置である。このような手振れ補正装置とオートフォーカシング装置は多様
に構成することができる。実施例の場合、複数枚のレンズでなった光学モジュールを光軸
に平行な方向に動かすか、光軸に垂直な面に対して動かすことで、このようなオートフォ
ーカシング動作と手振れ補正動作を行うことができる。
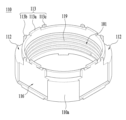
たレンズ駆動装置100の分解斜視図を示し、図3は図1のレンズ駆動装置100からカ
バー部材300を除去した斜視図を示し、図4は図3に示したレンズ駆動装置の平面図を
示し、図16は図3に示したレンズ駆動装置のAB断面図を示し、図17は図3に示した
レンズ駆動装置のCD断面図を示す。
、x軸とy軸によってなるxy平面は光軸に対して垂直な平面を意味するもので、便宜上
光軸方向(z軸方向)は第1方向、x軸方向は第2方向、y軸方向は第3方向に定義する
ことができる。
300、上側弾性部材150、ボビン110、第1コイル120、ハウジング140、マ
グネット130、下側弾性部材160、弾性支持部材220a~220d、第1位置セン
サー180、第2コイル230、第2回路基板250、ベース210及び第2及び第3位
置センサー240a、240bを含む。
材150、下側弾性部材160、及び弾性支持部材220a~220dは第1レンズ駆動
ユニット100を成すことができ、また第1位置センサー180をさらに含むことができ
る。第1レンズ駆動ユニット100はオートフォーカス用であってもよい。
ベース210は第2レンズ駆動ユニット200を成すことができ、また第1及び第2位置
センサー240a、240bをさらに含むことができる。第2レンズ駆動ユニット200
は手振れ補正用であってもよい。
0、ボビン110、第1コイル120、ハウジング140、マグネット130、下側弾性
部材160、弾性支持部材220a~220d、第2コイル230、及び第2回路基板2
50を収容する。
10の上部と結合することができる。
る開口部310を上面に備えることができる。また、カメラモジュールの内部にほこりや
水分などの異物が浸透することを防止するために、カバー部材300の開口部310には
透光性素材でなったウィンドウ(Window)を備えることができる。
ば第1方向に移動可能である。
れるレンズバレル(lens barrel、図示せず)を含むことができるが、レンズ
バレルは後述するカメラモジュールの構成であってもよく、レンズ駆動装置100の必須
構成要素ではなくてもよい。
0の第2斜視図を示す。
着のために中空101を有する構造であってもよい。中空101の形状はレンズ又はレン
ズバレルの形状によって決定されることができる。例えば、中空101は、円形、楕円形
、又は多角形であってもよい。
形成される雄ネジ部の結合によってレンズバレルがボビン110に結合することができる
。しかし、これに限定するものではなく、レンズバレルをボビン110の内側に螺合以外
の方法で直接固定することもできる。若しくは、レンズバレルなしに一枚以上のレンズが
ボビン110と一体に形成されることができる。
形成される少なくとも一つの下側支持突起114(図7参照)を備えることができる。
されることができ、よってボビン110が上側弾性部材150に結合及び固定されること
ができる。
び第2上側突起113cを含むことができる。
離隔して配置され、第2上側突起113cは中央突起113aの他側に中央突起113a
から第2距離だけ離隔して配置されることができる。
側突起113cは中央突起113aを基準として左右対称に配置されることができるが、
これに限定されるものではなく、上側弾性部材150が内側フレーム151の形状によっ
て左右非対称であってもよい。
柱形であってもよいが、これに限定されるものではなく、他の実施例においては円筒形で
あってもよい。
113bの間、及び中央突起113aと第2上側突起113cの間に結合されることがで
き、これにより内側フレーム151がボビンの上部と結合することができる。ボビン11
0の上側支持突起113と内側フレーム151は熱融着又はエポキシなどの接着部材によ
って互いに固定されることができる。
び第2上側突起113cはボビン110が回転することを防止するストッパーの役目をす
ることができる。
110の上面上に配置されることができる。
突起113は、周辺部品との干渉を避けるために、互いに離隔して配置されることができ
る。例えば、ボビン110の中心を通る仮想線に対して対称状に上側支持突起113が一
定の間隔で配置されることができる。若しくは、隣接した上側支持突起113の間隔が一
定ではないが、ボビン110の中心を通る仮想線に対して対称になるように上側支持突起
113が配置されることができる。
ってもよい。ボビン110の下側支持突起114は下側弾性部材160の内側フレーム1
61と結合することができ、よってボビン110が下側弾性部材150に結合及び固定さ
れることができる。
14はボビン110の中心を通る仮想線に対して対称的に一定の間隔又は一定でない間隔
で配置されることができる。
ネット装着凹部116が設けられることができる。
の外周面に設けられることができ、マグネット装着凹部116の数はマグネットの数と同
一の数でボビン110の外周面に設けられることができる。
けられることができ、互いに向き合うマグネット装着凹部は二対であってもよい。また、
互いに向き合うある一対のマグネット装着凹部116と他の一対のマグネット装着凹部は
互いに直交してもよい。
した構造であってもよい。例えば、マグネット装着凹部116はマグネット130を挿入
することができるように上部側壁が開放する凹状であってもよいが、これに限定されるも
のではなく、他の実施例でハウジング140のマグネット装着部は側壁一部が開放してい
ない凹んでいる凹部構造を有することができる。
ン110との空間的干渉を排除し、連結部153の弾性変形をより容易にするために、上
側弾性部材150の連結部153に対応して外周面110aの上部に上側逃避溝112を
備えることができる。
外周面110aの上部に形成されることができる。例えば、ボビン110は、外周面11
0aの上部に互いに離隔して形成される4個の上側逃避溝112を含むことができる。
ボビン110との空間的干渉を排除し、連結部163の弾性変形をより容易にするために
、下側弾性部材160の連結部163に対応して外周面の下部に下側逃避溝118を備え
ることができる。
外周面110aの下部に形成されることができる。例えば、ボビン110は、外周面11
0aの下部に互いに離隔して形成される4個の下側逃避溝118を含むことができる。
ビン110の中空101の中心からボビン110の外周面方向にふくらんでいる曲面であ
ってもよい。
周面110a上に配置される。例えば、マグネット130はボビン110のマグネット装
着凹部116内に配置されることができる。
ネット装着凹部116に固定されることができる。
のマグネットが互いに離隔してボビン110の外周面上に配置されることができる。
実施例においては台形であってもよい。
部116内に配置されることができ、向き合うマグネット130は平行に配置されること
ができる。
ができる。
。しかし、これに限定するものではなく、マグネット130と第1コイル120の対向面
のいずれか一つのみが平面であってもよく、他の一つは曲面であってもよい。若しくは、
第1コイル120とマグネット130の対向面はいずれも曲面であってもよい。この際、
第1コイル120とマグネット130の対向面の曲率は同一であっても良い。
。
有するように配置されれば、第1コイル120もマグネット130と対応する面が同じ極
性を有するように構成されることができる。
S極となるように配置することができる。しかし、これに限定するものではなく、マグネ
ット130の極性を反対に構成することも可能である。
コイル120と向き合う面が2個又はそれ以上に分割される場合、第1コイル120も分
割されたマグネット130と対応する数に分割構成されることも可能である。
ができるように内部にボビン110を収容する。
40の第2斜視図を示す。
えば、ハウジング140は、多角形(例えば、四角形又は八角形)の中空201を備える
ことができる。
される複数の支持部720-1~720-4を含むことができる。
110の外周面に装着されるマグネット130を露出させる開口部701が形成されるこ
とができる。
720-4は互いに離隔して配置されることができる。
限定されるものではない。
の少なくとも一対は向き合うように配置されることができる。
12、118に対応するように配置されることができる。
グネット装着凹部の間に位置するボビン110の外周面110aに対応するように配置さ
れることができる。
角部のそれぞれに対応するかあるいは整列するように配置されることができる。
方向に平行な第1側面730-1、第3方向に平行な第2側面730-2、及び前記第1
側面と前記第2側面の間に配置される第3側面730-3を含むことができる。第1~第
3側面720-1~720-3のそれぞれは平面であってもよい。
第1側面730-1が成す第1角度、及び第3側面730-3と第2側面720-2が成
す第2角度は鈍角であってもよく、第1角度と第2角度は同一であってもよい。
面積は第1及び第2側面730-1、730-2のそれぞれの面積より広くてもよいが、
これに限定されるものではない。
ジング140の中空201の中心からハウジング140の支持部720-1~720-4
の外周面730の方向にふくらんでいる曲面であってもよい。
移動することができるようにするために、ハウジング140の支持部720-1~720
-4のそれぞれの内周面740はボビンの外周面の曲面と対応又は一致する曲面を有する
ことができる。
720-4は第1及び第2側面720-1、720-2の下部から突出する段突部731
、732を備えることができる。
少なくとも一つの第1ストッパー143を備えることができる。すなわち、ハウジング1
40の第1ストッパー143は、外部衝撃の発生時、ハウジング140の上端部710が
カバー部材300の内側面に直接衝突することを防止することができる。
ことができ、ハウジング140の支持部720-1~720-4に対応するか整列して配
置されることができる。
して配置されることができる。例えば、少なくとも一対の第1ストッパーは向き合うよう
に配置されることができる。
とができる。例えば、第1ストッパー143は2分割されることができ、分割された2個
の第1ストッパー143a、143bは既設定の距離だけ離隔して配置されることができ
る。また、ハウジング140の第1ストッパー143は上側弾性部材150の設置位置を
ガイドする役目をすることができる。
から突出する少なくとも一つの第2ストッパー146を備えることができる。すなわち、
ハウジング140の第2ストッパー146は、外部衝撃の発生時にハウジング140の上
端部710の側面がカバー部材300の内側面に直接衝突することを防止することができ
る。
端部710の上面から突出する少なくとも一つの上側フレーム支持突起144をさらに備
えることができる。
グ140の複数の上側フレーム支持突起144はハウジング140の上端部710の上面
上に互いに離隔して配置されることができる。
角部に隣接して配置されることができる。
に、支持部720-1~720-4のそれぞれの下面から突出する少なくとも一つの下側
フレーム支持突起145を備えることができる。
~720-4のそれぞれの下面中央に整列されることができるが、これに限定されるもの
ではない。他の実施例においては、ハウジング140の下側フレーム支持突起145の数
は複数であってもよい。
有する緩衝支持部741を備えることができる。緩衝支持部741には後述するダンパー
(damper)が配置又は塗布されることができる。
持部742を含むことができ、緩衝支持部741と外側支持部742の間には第1方向に
段差d1が存在することができる。
レーム152と対応するか一致する形状であってもよく、上側弾性部材150の外側フレ
ーム152を支持することができる。
持部742との間に段差d1を有することができる。
対応して位置する第1部分S1、及び上側弾性部材の折曲部151aに対応して第1部分
S1の間に位置する第2部分S2を含むことができる。
10の上側逃避溝112と垂直方向に整列されることができる。
150の連結部153の間にはダンパーが塗布されることができる。
部151aとの空間的干渉を排除するための逃避溝750を備えることができる。空間的
干渉を避けるために、逃避溝750の長さは折曲部151aの長さと同一であってもよく
、それより長くてもよい。
通過する貫通溝751を備えることができる。
部710の側面から陥没し、側面方向に開口(opening)することができるが、こ
れに限定されるものではなく、他の実施例においてはハウジング140の上端部710の
上面と下面のみを貫くホール構造であってもよい。
ウジング140の側面外に露出されないほどの深みを有することができる。貫通溝751
は弾性支持部材220a~220dをガイドするか支持する役目をすることができる。
とができる。第1位置センサー用溝141bは第1位置センサー180に対応する大きさ
及び形状を有することができる。
0-4の間に位置する上端部710の側面に形成されることができる。
190はハウジング140の第1位置センサー用溝141b内に配置されることができる
。第1位置センサー190はソルダリング又は半田付け方式で第1回路基板170に電気
的に連結される。
に連結されることができる。
サーであってもよく、ボビン110が第1方向に移動することによるマグネット130の
磁場の変化を感知することができる。第1位置センサー190はマグネット130に対応
するように配置されることができる。
ホールセンサーからデータを受けて外部のコントローラーとプロトコル(protoco
l)によるデータ通信、例えばI2C通信を行うドライバーを含むことができる。若しく
は、他の実施例において、第1位置センサー190はホールセンサー単独で具現されるこ
ともできる。
上に配置されることができる。
~第3側面730-1~730-3上に配置されるリング(ring)形コイルブロック
であってもよいが、これに限定されるものではない。
外周面730の形状に対応する多角形、例えば8角形であってもよい。例えば、第1コイ
ル120のリング形状において、少なくとも4個の面は直線であってもよく、4個の面を
連結する角部はラウンド又は直線であってもよい。
向き合うことができる。すなわち、マグネット130と第1コイル120の間にはハウジ
ング140の少なくとも一部が配置されないこともあり、開口部701を通じて第1コイ
ル120とマグネット130は向き合うことができる。
ビン110と上側弾性部材150の結合斜視図を示し、図11は図2のボビン110と下
側弾性部材160の結合斜視図を示し、図12は図2のボビン110、ハウジング140
、及び上側弾性部材150の斜視図を示し、図13は図2のボビン110、ハウジング、
上側弾性部材150、及び第1回路基板170の結合斜視図を示す。
ボビン110及びハウジング140と結合することができる。例えば、上側弾性部材15
0はボビン110の一端(例えば、上部)、及びハウジング140の一端(例えば、上部
)と結合することができ、下側弾性部材160はボビン110の他端(例えば、下部)、
及びハウジング140の他端(例えば、下部)と結合することができる。
の動作を行うようにボビン110を弾性で支持することができる。
0と結合する外側フレーム152、及び内側フレーム151と外側フレーム152を連結
する連結部153を含むことができる。
0と結合する外側フレーム162、及び内側フレーム161と外側フレーム162を連結
する連結部163を含むことができる。上側弾性部材150と下側弾性部材160はリー
フスプリングの形態であってもよい。
一回以上折り曲げられて一定形状のパターンを形成することができる。
昇及び/又は下降の動作が弾性力によって支持されることができる。連結部153、16
3は、内側フレーム151、161が外側フレーム152、162に対して所定範囲で弾
性的に変形可能であるように内側フレーム151、161と外側フレーム152、162
を連結することができる。
ウジング140の中空201に対応する中空を備えることができる。上側弾性部材150
の外側フレーム152は内側フレーム151の周りに配置される多角形のリング形状であ
ってもよい。
結合する折曲部151aを有することができる。
くらんでいる湾曲形状であってもよい。
部分911と第2部分912の間に位置する第3部分913を含むことができる。
0の中央突起113aと第1上側突起113bの間、及び中央突起113aと第2上側突
起113cの間に結合されることができる。上側弾性部材150の折曲部151aの第3
部分913の内周面はボビン110の中央突起113aの外周面に接することができる。
固定されるか又はエポキシなどの接着部材で固定されることができる。
突起144と結合する通孔152aが設けられることができる。ハウジング140の上側
フレーム支持突起144と上側弾性部材150の第1通孔152aは熱融着で固定される
かあるいはエポキシなどの接着部材で固定されることができる。
43と結合する第1ガイド孔153を備えることができる。
対応する位置、例えば外側フレーム152の角部に隣接して形成されることができる。
3a、143bのそれぞれに対応する第1ガイド孔153a、153bが形成されること
ができ、第1ガイド孔153a、153bは互いに離隔することができる。
ウジング140の中空201に対応する中空を備えることができる。
角形のリング形状であってもよい。
ができる。下側弾性部材160は、互いに電気的に分離される第1下側弾性部材150a
及び第2下側弾性部材150bを含むことができる。
に分離されるように2分割されることができる。
内側フレームのいずれか一つ、分割された2個の外側フレームのいずれか一つ、及び両者
を連結する連結部を含むことができる。
結合する通孔161aが設けられることができる。ボビン110の下側支持突起114と
下側弾性部材150の通孔161aは熱融着で固定されるかあるいはエポキシなどの接着
部材で固定されることができる。
~720-4の下側フレーム支持突起145と結合する挿入溝162aを備えることがで
きる。
aは熱融着で固定されるかあるいはエポキシなどの接着部材で固定されることができる。
、第1コイル120の縦線は第2下側弾性部材160bに電気的に連結されることができ
る。
グなどによって第1コイル120の始線が電気的に連結される第1ボンディング部169
aを備えることができる。また、第2下側弾性部材160bの内側フレームの一端には第
1コイル120の縦線が電気的に連結される第2ボンディング部169bを備えることが
できる。
2下側弾性部材160a、160bのそれぞれの外側フレーム162は半田付け又はソル
ダリングなどによって第1回路基板170と電気的に連結されるパッド部165a、16
5bを備えることができる。
170aに形成される第1端子175-1~175-n(n>1の自然数)の中で対応す
る端子と電気的に連結されることができる。第1コイル120は第1及び第2下側弾性部
材160a、160bを介して第1回路基板170と電気的に連結されることができる。
起113の間の結合、及び下側弾性部材160の内側フレーム161の通孔161aとボ
ビン110の下側支持突起114の間の結合によって、ボビン110は上側及び下側弾性
部材150、160の内側フレーム151、161に固定されることができる。
上側フレーム支持突起144の間の結合、及び下側弾性部材160の外側フレーム162
の挿入溝162aとハウジング140の下側フレーム支持突起145の間の結合によって
、ハウジング140は上側及び下側弾性部材150、160の外側フレーム152、16
2に固定されることができる。
弾性部材160のそれぞれを第1回路基板170と電気的に連結することもできる。
ないが、これに限定されるものではない。他の実施例においては、下側弾性部材160は
分割されず、上側弾性部材150を2分割し、2分割された上側弾性部材を第1回路基板
170と電気的に連結することにより、第1コイル120に相異なる極性を有する電源を
供給することができる。
コイル120の始線を上側弾性部材150と連結し、第1コイル120の縦線を下側弾性
部材160と連結し、上側及び下側弾性部材150を第1回路基板と電気的に連結するこ
とにより、第1コイル120に相異なる極性を有する電源を供給することができる。
回路基板170と電気的に連結しないし、第1コイル120と第2回路基板250を電気
的に直接連結し、弾性支持部材220a~220dによって第1回路基板170と第2回
路基板250を電気的に連結することにより、第1コイル120に相異なる極性を有する
電源を供給することができる。
2上に配置される第1上面部170b、及び第1上面部170bから下方に折り曲げられ
る第1端子面170aを含むことができる。
と対応又は一致する形状であってもよく、上側弾性部材150の外側フレーム152の上
面に接触することができる。例えば、第1回路基板170の第1上面部170bは中空7
10-1を有するリング(ring)形であってもよく、第1回路基板170の上面部1
70bの外周面は四角形であってもよい。
を第1上面170bに備えることができる。ハウジング140の上側支持突起144と第
1回路基板170の通孔171は熱融着又はエポキシなどの接着部材で固定されることが
できる。
孔172を備えることができる。ここで、第2ガイド孔172は第1回路基板170を貫
く貫通孔の形態であってもよい。
2の第1ガイド孔153及び第1回路基板170の第2ガイド孔172と一緒に結合する
ことができる。
と対応する位置、例えば第1回路基板170の第1上面170bの角部に隣接して形成さ
れることができる。
a、143bに対応する第2ガイド孔172a、172bが形成されることができ、第2
ガイド孔172a、172bは互いに離隔することができる。
第1パッド174a~174dを第1上面170bに備えることができる。
~220dが挿入される凹部又は貫通ホールを備えることができる。
dのそれぞれは弾性支持部材220a~220dの中で対応するいずれか一つの一端と電
気的に連結されることができる。
板170の第1上面170bの角部と第2ガイド孔172a、172bの間に配置される
ことができる。
曲げられることができ、外部から電気的信号が入力される複数の第1端子(termin
als)又は第1ピン(pins)175-1~175-n(n>1の自然数)を含むこ
とができる。
板170の第1端子面170aは第1位置センサー用溝141bが設けられるハウジング
140の上端部710の側面側に折り曲げられることができる。したがって、第1位置セ
ンサー用溝141b内に配置された第1位置センサー190は第1回路基板170の第1
端子面170aと密着することができる。
位置センサー190に供給する端子、第1位置センサー190の出力を出力する端子、又
は/及び第1位置センサー190のテストのための端子を含むことができる。第1回路基
板170に形成される端子175-1~175-n(n>1の自然数)の個数は制御が必
要な構成要素の種類によって増減することができる。
5-n(n>1の自然数)を電気的に連結する配線又は配線パターンを含むことができる
。
端子面170aに形成される複数の端子175-1~175-n(n>1の自然数)の少
なくとも一つと電気的に連結されることができ、第1位置センサー190の具現形態によ
って電気的に連結される端子の数が決定されることができる。
ことができる。例えば、第1回路基板170を省略し、上側弾性部材150が耐熱性、耐
化学性、及び耐屈曲性を有する薄いフィルム、及び回路配線のための銅箔パターンを積層
した構造を含むことができる。
することができる。例えば、第1回路基板170を省略し、下側弾性部材160をフレキ
シブルフィルム、及び銅箔パターンを積層した構造を含むように具現することができる。
解斜視図を示す。
グ140の中空201に対応する中空を備え、カバー部材300と一致又は対応する形状
、例えば四角形であってもよい。
きる。ベース210は上面から陥没し(recessed)、ハウジング140の支持部
720-1~720-4の下側フレーム支持突起145を挿入又は支持する装着溝213
を備えることができる。
ベース210の上面に形成されることができる。
13の側面の一部はベース210の中空を通じて露出されることができる。すなわち、ベ
ース210の装着溝213の側面のうちベース210の中空に向かう面は開放することが
できる。
されることができ、エポキシなどの接着部材によって装着溝213に固定されることがで
きる。
定深みだけ内側に凹むように形成される端子面支持溝210aを側面に備えることができ
る。
、ベース210の外周面外に突出しないか、ベース210の外周面外に突出する程度を調
節するように第2回路基板250の端子面250aを装着させる役目をすることができる
。
位置センサー装着溝215a、及び第3位置センサー240bが配置される第3位置セン
サー装着溝215bを備えることができる。
ー装着溝215a、215bとベース210の中心を連結する第2仮想線は互いに交差す
ることができ、交差する第1及び第2仮想線が成す角度は90度であってもよいが、これ
に限定されるものではない。
は開放することができ、ベース210の中空に連通することができるが、これに限定され
るものではない。他の実施例において、第2及び第3位置センサー装着溝は上面から陥没
した凹部の形態であってもよい。
央に位置することができる。例えば、第1及び第2位置センサー装着溝215a、215
bは第2コイル230の中央又は中央付近に対応又は整列されることができ、第2コイル
230の中心と位置センサー装着溝215a、215bに配置される第2及び第3位置セ
ンサー240a、240bの中心は互いに整列されることができるが、これに限定される
ものではない。
センサー240a、240bの上面とベース210の上面は同一平面上に位置することが
できるが、これに限定されるものではない。
きる。ベース210とカバー部材300の結合の際、ベース210の段突部210bの上
部はカバー部材300をガイドすることができ、カバー部材300の下部と接触すること
ができる。段突部210bとカバー部材300の端部は接着剤などによって接着固定及び
シールされることができる。
12aを備えることができる。
例えば、結合突起212aはベース210の角部と装着溝213の間に位置することがで
きるが、これに限定されるものではない。結合突起212aの数は2個以上であってもよ
く、向き合うように配置されることができるが、これに限定されるものではない。
ジュールを構成することもできる。
る。例えば、第2及び第3位置センサー240a、240bはベース210の位置センサ
ー装着溝215a、215b内に配置されることができ、ハウジング140が第2方向又
は/及び第3方向に移動することを感知することができる。
の変化を感知することができる。例えば、第2及び第3位置センサー240a、240b
はホールセンサー(Hall sensor)であってもよいが、これに限定されるもの
ではなく、磁場の変化を感知することができるセンサーであればどのものでも使用可能で
ある。
ように配置されることができるが、これに限定されるものではない。
て第2回路基板250と電気的に連結されることができる。
ー240a、240bが配置されることができる。位置センサー240a、240b、第
2コイル230及びマグネット130は同一軸上に配置されることができるが、これに限
定されるものではない。
ハウジング140の中空201又は/及びベース210の中空に対応する中空を備えるこ
とができる。第2回路基板250の外周面の形状はベース210の上面と一致又は対応す
る形状、例えば四角形であってもよい。
端子(terminals)又はピン(pins)が形成される少なくとも一つの第2端
子面250aを備えることができる。
置センサー用端子、及び第1回路基板用端子を含むことができる。
端子であってもよい。例えば、4個の第2コイル230a~230dのそれぞれを独立的
に駆動するために必要な第2コイル用端子の数は全部で8個であってもよい。若しくは、
第2方向用コイル230a、230b及び第3方向用コイル230c、230dを独立的
に駆動するために必要な第2コイル用端子の数は全部で4個であってもよい。
パッド253と電気的に連結されることができる。
位置センサー用端子は2個の入力端子及び2個の出力端子を含むことができる。ただ、第
2位置センサー及び第3位置センサーは2個の入力端子を共通して使うことができるので
、第2及び第3位置センサー用端子の数は全部で6個であってもよい。
第1回路基板170は第1コイル120及び第1位置センサー190が電気的に連結され
るので、第1回路基板用端子は第1コイル120及び第1位置センサー190のための端
子を含むことができる。
を含む場合には、第1電源(VCC)、第2電源(GND)、同期用クロック信号(SC
L)、及びデータビット情報(SDA)のための4個の端子が必要であり得る。
基板用端子は全部で4個であってもよい。
ホールセンサー用電源端子が必要であるため、第1回路基板用端子は全部で4個であって
もよい。
0、第2回路基板250、及び弾性支持部材220a~220dによって第1コイル12
0に電源を供給し、第1位置センサー190がホールセンサー単独で具現される場合には
、第1回路基板用端子は全部で6個であってもよい。
によって第1回路基板170と電気的に連結されることができる。
これに限定するものではなく、ベース210の表面に表面電極方式などで回路基板の端子
を構成することもできる。
とも一つの端子又はパッドを備えることができる。
気的に接続される第1端子、第2方向用第2コイル230a、230bの縦線が電気的に
接続される第2端子、第3方向用第2コイル230c、230dの始線が電気的に接続さ
れる第3端子、及び第3方向用第2コイル230c、230dの縦線が電気的に接続され
る第4端子を含むことができる。
ることができる。回路基板250の通孔251は複数であってもよく、互いに向き合うよ
うに配置されることができる。
第4端子の間に配置されることができる。
ド252a~252dを備えることができる。例えば、第2パッド252a~252dは
、弾性支持部材220a~220dの一端が挿入可能な溝又は貫通ホールを備えることが
できる。
されることができるが、これに限定されるものではない。
って、端子面251a、251bに設けられる複数のピンと電気的に連結されることがで
きる。
50の上面上に配置される。
が、これに限定されるものではなく、他の実施例においては、第2回路基板250とは別
個の回路基板内にコイルが含まれる構造であってもよく、ベース210と密着して配置さ
れることもでき、ベース210から一定距離だけ離隔して配置されることもできる。
るが、これに限定されるものではない。他の実施例においては、第2コイル230a~2
30dはボビンの中空101とハウジング140の中空201を通る仮想の中心軸からマ
グネット130の離隔距離より大きな離隔距離を有するように配置されることもでき、同
じ離隔距離を有するように配置されることもできる。
4個が取り付けられることができる。例えば、第2コイル230a~230dは第2方向
に平行に整列される第2方向用第2コイル230a、230b、及び第3方向に平行に整
列される第3方向用第2コイル230c、230dを含むことができる。
2コイルを備えることもでき、さらに他の実施例は3個以上の第2方向用第2コイル、及
び3個以上の第3方向用第2コイルを含むことができる。
れたワイヤ状であってもよく、第2回路基板250と電気的に連結されることができる。
れることができる。
に連結する。
0の第2上面第1角部領域と対応する1個以上の第2角部領域を含むことができる。弾性
支持部材220a~220dの少なくとも一つは第1角部領域及び第2角部領域の間に配
置されることができる。
ってもよく、第2角部領域は第2回路基板250の第2上面から既設定の距離以内の領域
であってもよい。
れることができ、第2パッド252a~252dは第2回路基板250の第2角部領域に
設けられることができる。
74a~174dと電気的に連結されることができ、他端は第2回路基板250の第2パ
ッド252a~252dに電気的に連結されることができ、第2回路基板250の第2パ
ッド252a~252dは、第2回路基板250の配線パターンによって、端子面250
aに設けられた第1回路基板用端子と電気的に連結されることができる。
ができる。図13で、それぞれの第1回路基板170の第1角部領域及び第2回路基板2
50の第2角部領域を連結する弾性支持部材の数は1個であってもよい。
空201の中心を基準として第1方向に垂直な第2及び第3方向に点対称であってもよい
。
一であってもよい。
支持部材220a~220dの数は4個以上であってもよい。また、第1位置センサー1
90がホールセンサー単独で具現される場合、弾性支持部材220a~220dの数は6
個以上であってもよい。
面250aに形成される第1回路基板用端子と電気的に連結されることができる。
気的信号が移動する通路の役目をすることができ、ベース210に対してハウジング14
0を弾性で支持することができる。
とができ、弾性で支持することができる部材、例えばリーフスプリング(leaf sp
ring)、コイルスプリング(coil spring)、サスペンションワイヤなど
で具現されることができる。また、他の実施例において、弾性支持部材220a~220
dは上側弾性部材と一体に形成されることができる。
ンズ駆動装置の斜視図を示す。図18及び図19はカバー部材300が省略された図であ
る。
部材を備えるが、図19に示した弾性支持部材220-1~220-6は全部で6個であ
ってもよい。弾性部材の数を除き、図2に示したレンズ駆動装置100についての説明は
図18に示した実施例に同様に適用することができる。
の中空201の中心を基準として第1方向に垂直な第2及び第3方向に点対称であっても
よい。
ング140の中空201の中心を基準として第1方向に垂直な第2方向に点対称である第
1弾性支持部材220-1、220-4、及びハウジング140の中心を基準として第1
方向及び第2方向に垂直な第3方向に点対称である第2弾性支持部材220-2、220
-3、220-5、220-6を含むことができる。
、220-5、220-6の数は互いに異なることができる。例えば、第2弾性支持部材
220-2、220-3、220-5、220-6の数が第1弾性支持部材220-1、
220-4の数より多くてもよい。
の弾性力を対称的に又は等しくするために、ボビン110に対する第1弾性支持部材22
0-1、220-4の弾性力の和とボビン110に対する第2弾性支持部材220-2、
220-3、220-5、220-6の弾性力の和は同一であってもよい。
1弾性支持部材220-1、220-4の数より多いので、第2弾性支持部材220-2
、220-3、220-5、220-6の弾性係数は第1弾性支持部材220-1、22
0-4の弾性係数の1/2であってもよい。
したレンズ駆動装置の斜視図を示す。図20及び図21はカバー部材300が省略された
図である。弾性部材の数を除き、図2に示したレンズ駆動装置100についての説明は図
20に示した実施例に同様に適用することができる。
で8個であってもよい。弾性支持部材220-1’~220-8’は、ハウジング140
の中心を基準として第1方向に垂直な第2方向に点対称である第1弾性支持部材220-
1、220-2、220-5’、220-6’、及びハウジング140の中心を基準とし
て第1方向及び第2方向に垂直な第3方向に点対称である第2弾性支持部材220-3’
、220-4’、220-7’、220-8’を含むことができる。
0-3’、220-5’、220-6’の数は同一であり、第1及び第2弾性支持部材2
20-1’~220-8’の少なくとも一つは第1回路基板170と第2回路基板250
を電気的に連結することができる。また、第1及び第2弾性支持部材220-1’~22
0-8’の弾性係数は互いに同一であっても良い。
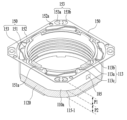
部材300を除去した図22のレンズ駆動装置200の結合斜視図を示す。図2及び図3
と同一の図面符号は同一構成を示し、同一構成については説明を簡略にするか省略する。
性部材150、ボビン110、第1コイル1120、ハウジング140、第1マグネット
1130、下側弾性部材160、弾性支持部材220a~220d、第1位置センサー1
80、第2マグネット185、第2コイル230、第2回路基板250、ベース210及
び第2及び第3位置センサー240a、240bを含む。
駆動装置200は駆動用の第1マグネット1130及びセンシング用の第2マグネット1
85を含むことができる。
されるが、これに対応するレンズ駆動装置200の第1マグネット1130はハウジング
140に配置されることができる。
レンズ駆動装置200の第1コイル1120はボビン1110の外周面に配置されること
ができる。
結合斜視図を示す。
応する大きさを有するマグネット装着凹部116が設けられることができる。
ル1120の配置位置によって決定されることができる。
、マグネット装着凹部116はボビン1110の外周面110aの第2領域P2に位置す
ることができる。一方、第1コイル1120がボビン110の外周面110aの第2領域
P2に位置する場合、マグネット装着凹部116はボビン1110の外周面110aの第
1領域P1に位置することができる。
0aのベースライン115-1の下側に位置する領域であってもよく、ボビン1110の
外周面110aの第2領域P2はボビン1110の外周面110aのベースライン115
-1の上側に位置する領域であってもよい。ボビン1110の外周面110aのベースラ
イン115-1はボビン1110の外周面110aの下端から基準距離だけ離隔する線で
あってもよく、基準距離はボビン1110の外周面110aの上端と下端間の距離の2/
3~1/2の距離であってもよいが、これに限定されるものではない。
の変位値(又は位置)を感知又は判断することができる。第2マグネット185は磁場の
強度を増加させるために2分割されることができるが、これに限定されるものではない。
ーラップしないようにボビン1110の外周面上に配置されることができる。
凹部116内に配置されることができ、マグネット装着凹部116の位置は前述したよう
であり、第2マグネット185は光軸に垂直な方向に第1コイル1120と互いにオーバ
ーラップしなくてもよい。
固定されることができるが、これに限定されるものではなく、第2マグネット185はマ
グネット装着凹部116に挿入されて固定されることもできる。
配置され、第1位置センサー190はハウジング140の外周面に配置されるが、他の実
施例においてはその反対であってもよい。
ことができ、第2マグネット185はハウジング140に配置されることができる。この
場合、ボビン1110の外周面に表面電極(図示せず)が形成され、第1位置センサー1
90は表面電極(図示せず)を介して電流を受けることができる。
グネット185とオーバーラップしないように、第1コイル1120はボビン1110の
外周面110aの第1領域P1に配置されることができる。
うに巻線されることができる。
イルブロックのそれぞれはリング(ring)形状であってもよい。この際、コイルブロ
ックのそれぞれは第1面115aの中で対応するいずれか一つに配置されることができ、
多角形、例えば8角形又は円形であってもよい。例えば、コイルブロックのそれぞれのリ
ング形状は、少なくとも4面が直線であってもよく、4面を連結する角部はラウンド又は
直線であってもよい。
向又は水平方向にオーバーラップしないように、第1コイル1120は第2マグネット1
85の下側に配置されることができる。
40と結合された上側弾性部材150の斜視図を示す。
るようにハウジング140の外周面上に配置される。例えば、第1マグネット1130は
ハウジング140の支持部720-1~720-4上に配置されることができる。例えば
、第1マグネット130は支持部720-1~720-4の第1及び第2側面720-1
、720-2上に配置されることができる。
40の支持部720-1~720-4に固定されることができる。
トが互いに離隔してハウジング140の支持部720-1~720-4の第1及び第2側
面720-1、720-2上に配置されることができる。
グネット185に関連して図2に示したレンズ駆動装置100と違う点を除き、図2に示
したレンズ駆動装置100についての説明は図22に示した実施例200に同様に適用す
ることができる。
装置からカバー部材300は省略される。
A1、第2ダンパーDA2、及び第3ダンパーDA3をさらに含むことができる。さらに
他の実施例においては、第1ダンパーDA1、第2ダンパーDA2及び第3ダンパーDA
3のいずれか一つを含むかあるいは二つ以上の組合せを含むことができる。
電気的に連結される部分上に設けられることができる。例えば、第1ダンパーDA1は弾
性支持部材220a~220dの一端と第1回路基板170の第1パッド174a~17
4dがボンディングされる部分上に塗布されることができる。
電気的にボンディングされる部分上に設けられることができる。例えば、第2ダンパーD
A2は弾性支持部材220a~220dの他端と第2回路基板250の第2パッド252
a~252dがボンディングされる部分上に塗布されることができる。
性支持部材220a~220dの間に設けられることができる。このようなダンパーDA
1~DA3はボビン110の移動時の発振現象を防止することができる。
ー部材300が省略された図である。
及び第1回路基板170が一体化して具現されたものであってもよい。
、外側フレーム152、及び連結部153を含むことができる。上側弾性部材150Pの
形状は前述した上側弾性部材150で説明したものが同様に適用されることができる。
気的に連結される回路パターンを含むことができる。例えば、上側弾性部材150Pの外
側フレーム152には、弾性支持部材220a~220dのそれぞれの一端と電気的に連
結される配線が形成されることができる。
端子面150PAを備えることができる。上側弾性部材150Pの端子面150PAは、
外部から電気的信号が入力される複数の端子又はピンを含むことができる。上側弾性部材
150Pの端子面は前述した第1回路基板170の端子面170aと同様な役目をするこ
とができる。
れ補正を説明するための概念図を示す。coil1は第2コイル230aであってもよく
、coil3は第2コイル230bであってもよく、coil2は第2コイル230cで
あってもよく、coil4は第2コイル230dであってもよい。
板250及びベース210から離隔して上部に位置することができる。
によって弾性的に変形されることによって可動部60が置かれる位置であってもよい。
が好ましく、これをレンズの焦点距離に換算すれば、レンズの焦点距離が約50μm~1
50μmである可動部60の位置であってもよい。
構成を含むことができ、AF固定部はハウジング140及びハウジング140に装着され
る構成を含むことができる。
10に装着されるレンズ(図示せず)を含むことができ、AF固定部はハウジング140
、カバー部材300、ベース210、第2コイル230a~230d、及び第2回路基板
250を含むことができる。
び第2マグネット185を含むことができ、AF固定部は、ハウジング140、第1マグ
ネット1130、カバー部材300、ベース210、第2コイル230a~230d、及
び第2回路基板250を含むことができる。
材150、160、第1回路基板170、及び第1位置センサー190を含むことができ
、OIS固定部は、ハウジング140、カバー部材300、ベース210、第2回路基板
250、及び第2コイル230a~230dを含むことができる。
回路基板170、及び第1位置センサー190を含むことができ、OIS固定部は、ハウ
ジング140、カバー部材300、ベース210、及び第2コイル230a~230dを
含むことができる。
力によって初期位置を基準として第1方向、例えば上方(+Z軸方向)と下方(-Z軸方
向)に可動部を移動させることである。例えば、第1コイル120、120に流れる電流
の方向を制御することにより、オートフォーカシングを遂行することができる。よって、
実施例は小型化が可能であり、少ない電磁気力で可動部60を所望の位置に移動させるこ
とができる。
、ボビン110とベース210が互いに離隔することができる。
1130と第2コイル230a~230dの間に発生する電磁気力によって可動部60を
-X軸方向、+X軸方向、-Y軸方向、又は+Y軸方向に移動させることである。
することができる。例えば、4本の第2コイル230a~230dのそれぞれに流れる電
流の方向を独立的に制御することにより、可動部60をX軸及び/又はY軸に移動させる
ことができる。これにより、実施例は自由な方向へのイメージ補正が可能である。
動方向を示す。
ことを意味することができる。例えば、0は電流を印加しないことを意味することができ
、1は可動部60から第2コイル方向に電磁気力が作用するように第2コイルに電流を印
加することを意味することができる。
より、可動部60は+X方向、-X方向、+Y方向、-Y方向、X+Y+方向、X-Y+
方向、X+Y-方向、及びX-Y-方向のいずれか一方向に移動するか、あるいはX軸及
びY軸方向に移動しないことができる。
より、オートフォーカシング及びOIS動作を同時に遂行することができる。例えば、第
1コイル120、及び第2コイル230a~230dに提供される信号のレベルを調節し
てオートフォーカシング及びOIS動作を同時に遂行することができる。
動方向を示す。
cと230dを電気的に連結し、電気的に連結される二対の第2コイル230aと230
b及び230cと230dを独立的に駆動することができる。0は駆動しないこと、+と
-は駆動電流の方向が互いに反対であることを意味することができる。
と大きな力が作用することができる。また、第1コイル120及び第2コイル230a~
230dを同時に駆動することにより、オートフォーカシング及びOIS動作を同時に遂
行することができる。例えば、第1コイル120、及び第2コイル230a~230dに
提供される信号のレベルを調節してオートフォーカシング及びOIS動作を同時に遂行す
ることができる。
とにより、初期位置0を基準として上方及び下方に可動部60を移動させることができる
。
)が可動部60の下方への移動距離(例えば、100μm)より大きくなることができる
。これは、使用者が一番多く使用する領域帯である50cm以上の領域で電流及び電圧の
消耗値が最小になるようにするためである。ここで、上方への移動距離は初期位置0から
可動部60の上側ストッパーまでの距離であってもよく、下方への移動距離は初期位置0
から可動部60の下側ストッパーまでの距離であってもよい。
10、1110に結合されるレンズバレル、イメージセンサー、及びプリント基板を含む
ことができる。この際、イメージセンサーはプリント基板に実装されることができ、プリ
ント基板はカメラモジュールの底面を形成することができる。
される赤外線遮断フィルターをさらに含むことができる。ベース210にはカメラモジュ
ールのプリント基板との通電のために別個のターミナル部材が設けられることもでき、表
面電極などによってターミナルをベース210と一体に形成することも可能である。一方
、ベース210はイメージセンサーを保護するセンサーホルダーの機能をすることができ
る。この場合、ベース210の側面に沿って下方にイメージセンサーを保護するための突
出部が形成されることもできる。しかし、このような突出部は必須構成ではなく、他の実
施例においては別個のセンサーホルダーがベース210の下部に配置されてその役目をす
るように構成することもできる。
御部をさらに含むことができる。便宜上、前述したレンズ駆動装置100、200を参照
して焦点制御部を説明するが、実施例はこれに限られない。すなわち、実施例による焦点
制御部は前述したレンズ駆動装置とは違う構成を有するレンズ駆動装置にも適用されて自
動焦点機能をすることができるのは言うまでもない。
ズムを示す。
Z軸方向への変位を示す。図32b~図32dの横軸は時間を示し、縦軸は変位を示す。
、F1を探す方法は次のようであり得る。
1地点P1から+Z軸方向に最大限移動可能な第2地点P2まで可動部60を既設定の速
度で移動させながら被写体に対する撮影を遂行し、撮影されたイメージの中で最適のイメ
ージに対応する最適の焦点距離を探す。
2地点P2から-Z軸方向に最大限移動可能な第1地点P1まで可動部60を既設定の速
度で移動させながら被写体に対する撮影を遂行し、撮影されたイメージの中で最適のイメ
ージに対応する最適の焦点距離を探す。
60を移動させながら被写体に対する撮影を遂行する。ついで、可動部60を最初位置0
に移動させる。
する撮影を遂行する。この時、最初位置0から第2距離(d2)までの可動部60の移動
方向は最初位置0から第1距離d1までの可動部60の移動方向と反対方向であってもよ
い。
撮影を遂行する。撮影されたイメージの中で最適のイメージに対応する最適の焦点距離を
探す。
aに示した焦点制御部400によって行われる自動焦点制御方法の一実施例のフローチャ
ートである。
コイル120、1120とマグネット130、1130の相互作用を制御し、光軸に平行
な第1方向に第1移動量(又は、第1変位量)だけボビン110、1110を移動させる
ことによって自動焦点機能をすることができる。このために、焦点制御部400は、情報
獲得部410、ボビン位置検索部420及び移動量調節部430を含むことができる。
被写体とイメージセンサーの間の距離、被写体の位置、又は被写体の位相の少なくとも一
つを含むことができる。
施例によると、レーザー(Laser)を用いて被写体情報を得ることができる。例えば
、大韓民国特許公開第1989-0008573にはレーザーを用いて対象物の距離を測
定する方法が開示されている。
用いてカメラと被写体の間の距離を獲得する方法が開示されている。
の合うボビン110、1110の位置を探すことができる(S220)。
LUT:Look Up Table)424を含むことができる。
位置をマッピングして保存することができる。
1110の位置を前もって求めてルックアップテーブル324の形態として保存すること
ができる。
0、1110を移動させる前、第1位置センサー190を用いて生成することができる。
された変位値がボビン110、1110の位置に相当する。よって、被写体とレンズの間
の距離である被写体情報別に焦点が合ったときのボビン110、1110の位置を測定し
てルックアップテーブル424を生成することができる。この時、測定されたボビン11
0、1110の位置はコード化されてルックアップテーブル424に保存されることがで
きる。
に対応する焦点の合うボビン110、1110の位置をルックアップテーブル424から
抽出し、抽出されたボビン110、1110の位置を移動量調節部430に出力すること
ができる。
424に保存されている場合、データ抽出部422は被写体情報に対応するコード値をル
ックアップテーブル424で探すことができる。
ビン110、1110を第1移動量(又は、第1変位量)だけ移動させることができる(
S230)。
コード値を調節して、ボビン110、1110を第1方向に第1移動量だけ移動させるこ
とができる。このために、ボビン110、1110の位置別電流量は前もって決定される
ことができる。
ボビン1110に結合された第2マグネット185から放出される磁気力の変化を感知す
ることができ、感知された磁気力の変化量に基づいて、出力される電流変化量を検出する
ことができる。
量に基づいてボビン110、1110の現在位置を計算又は判断することができ、このよ
うに計算又は判断されたボビン110、1110の現在位置を参照して、ボビン110、
1110を焦点の合う位置に第1移動量だけ移動させるための印加電流量を決定すること
ができる。
34aで横軸は焦点値を示し、縦軸は変位を示し、図34bで横軸は電流(又は時間)を
示し、縦軸は変位(又はコード)を示す。
35aで横軸は焦点値を示し、縦軸は変位を示し、図35bで横軸は電流(又は、時間)
を示し、縦軸は変位(又は、コード)を示す。
基準焦点距離(Macro)まで第1コイル120、1120に印加される電流を増加さ
せながら焦点が最適に合うボビン110、1110の位置(又は変位)400を探す。
ってもよく、第2基準焦点距離はレンズとイメージセンサーが一番近い位置にある時の焦
点距離であってもよいが、これに限定されるものではない。他の実施例において、第1基
準焦点距離はレンズとイメージセンサーが一番近い位置にある時の焦点距離であってもよ
く、第2基準焦点距離はレンズとイメージセンサーが一番遠い位置にある時の焦点距離で
あってもよい。
0、1110は駆動されないことがあり得る。その後、電流402(又は第1位置センサ
ー190で感知された磁気力の変化量に対応するコード値404)が続けて増加すること
によってボビン110、1110の変位が増加することができる。
までボビン110、1110を移動させた後、最適に焦点が合うボビン110、1110
の位置400を探すため、時間が多くかかることがあり得る。
が合うボビン110の位置に対するコードをルックアップテーブル424で探し、これに
基づいてボビン110、1110を焦点位置(又は、変位)410に第1移動量だけ直ぐ
移動させることができる。したがって、前述した比較例と比較すると、レンズの焦点を合
わせるのにかかる時間が短縮されることが分かる。
微細に合わせることもできる(S240~S260段階)。
グラフであり、図36aで横軸は焦点値を示し、縦軸は変位を示し、図36bで横軸は電
流(又は、時間)を示し、縦軸は変位(又は、コード)を示す。
第1移動量だけ移動させる段階(S230)を遂行した後、第1移動量より小さな第2移
動量の範囲内でボビン110、1110を移動させて、周波数変調伝達関数(MTF:M
odulation Transfer function)値の中で最大値を示すボビン
110の焦点位置を探すことができる(S240)。ここで、MTF値は解像力を数値化
した値であってもよい。
ボビン110、1110を移動させたかを判断する(S250)。若しくは、最大のMT
F値を探すために、焦点制御部400は、ボビン110、1110を所定回数移動させた
かを判断することができる(S250)。若しくは、最大のMTF値を探すまで、所定期
間を超えて又は所定回数を超えてボビン110、1110を続けて移動させることもでき
る。
、最大のMTF値を示すボビン110、1110の位置を最終的にレンズの焦点が合う最
終焦点位置として決定することができる(S260)。
ズの焦点を正確に合わせて解像力を向上させることができる。
実施例のフローチャートである。
がボビン110、1110の最初位置を基準として上方であるか下方であるかを判断する
(S310)。ここで、ボビン110、1110の最初位置はボビン110、1110が
第1移動量だけ移動する直前のボビン110、1110の位置であってもよい。
に第2移動量だけボビン110、1110を移動させる(S320)。ここで、第2移動
量は第1移動量より小さいので、焦点制御部400はボビン110、1110の位置を微
細に調整することができ、レンズの焦点を微細に調整することができる。また、下方への
微細調整のためには、図33bで説明したS240段階~S260段階を同様に適用する
ことができる。
上方に第2移動量だけボビン110、1110を移動させる(S330)。また、上方へ
の微細調整方法は図33bで説明したS240段階~S260段階を同様に適用すること
ができる。
及び上部スプリング1230、1240、両極着磁マグネット(又は、2極着磁マグネッ
ト)1250及び位置センサー1260を含むことができる。例えば、位置センサー12
60は位置検出センサー又は位置検出センサーを含むドライバーであってもよい。
。
210の下部1212は初期の静止状態にある可動部1220を支持することができ、あ
るいは上部及び/又は下部スプリング1230、1240によって固定部210の下部1
210から一定距離だけ離隔した状態で初期の静止状態で可動部220を支持することも
できる。
0を支持する役目をすることができるが、固定部1210の下部1212及び/又は上部
1216が下部及び/又は上部スプリング1230、1240を支持することもできる。
相当することもでき、カバー部材300を含むこともでき、ベース210をさらに含むこ
ともできる。
えば、可動部1220は前述したレンズ駆動装置200においてボビン1110に相当す
ることができるが、実施例はこれに限られない。
に含むことができる。レンズ駆動装置1200Aに含まれる第1コイルとマグネットは、
可動部1220をレンズの光軸方向であるz軸方向に移動させるために、互いに対向する
ように配置されて相互作用することができる。
20及び第1マグネット1130にそれぞれ相当することができるが、実施例はこれに限
られない。
されているが、後述するように、他の実施例による可動部1220は光軸の両方向(すな
わち、+z軸方向又は-z軸方向)に移動することができる。
1変位値を感知することができる。第1位置センサー1260は、両極着磁マグネット1
250の磁場をセンシングし、センシングされた磁場の強度に比例するレベルの電圧を出
力することができる。
、両極着磁マグネット1250は光軸方向に垂直な面を基準として互いに反対の極性が配
置される着磁方向であるy軸方向に第1位置センサー1260と対向して配置されること
ができる。
ー190に相当することができ、両極着磁マグネット1250は前述したレンズ駆動装置
200の第1マグネット1130に相当することができるが、実施例はこれに限られない
。
nico)、希土類磁石などに大別することができ、磁気回路の形態によって内磁型(P
type)と外磁型(F-type)に分類することができる。実施例はこのような両極
着磁マグネット1250の種類に限られない。
できる。ここで、側面は、第1側面1252及び第2側面1254を含むことができる。
第1側面1252は第1極性を有する面であってもよく、第2側面1254は第1極性と
反対の第2極性を有する面であってもよい。第2側面1254は光軸方向に平行な方向で
あるz軸方向に第1側面1252から離隔するか接するように配置されることができる。
この際、第1側面1252の光軸方向の第1長さ(L1)は第2側面1254の光軸方向
の第2長さ(L2)以上であってもよい。
1磁束密度が第2極性を有する第2側面1254の第2磁束密度より大きくなることがで
きる。
第2極性はS極であってもよい。
0A、1250Bの断面図を示す。
グネット1250A-1、1250A-2を含むことができ、非磁性体隔壁1250A-
3をさらに含むことができる。
グネット1250B-1、1250B-2を含むことができ、非磁性体隔壁1250B-
3をさらに含むことができる。
2は光軸方向に平行な方向(すなわち、z軸方向)に互いに離隔するか接するように配置
されることができる。
0B-2は光軸に垂直な方向、又は着磁方向(すなわち、y軸方向)に互いに離隔するか
接するように配置されることができる。
トであるものとして示されているが、図39bに示した構造を有するマグネットに取り替
えられることもできる。
ネット1250A-1、1250A-2の間に配置されることができ、図39bに示した
非磁性体隔壁1250B-3は第1及び第2センシング用マグネット1250B-1、1
250B-2の間に配置されることができる。
って、極性がほぼない区間を含むことができ、空気又は非磁性体素材で満たされることが
できる。
グネット1250A、1250Bの光軸方向に平行な方向への全長(LT)の5%以上又
は50%以下であってもよい。
り、横軸は光軸方向又は光軸方向に平行な方向であるz軸方向に可動部1220が移動し
た距離を示すことができ、縦軸は第1位置センサー1260でセンシングされた磁場、又
は第1位置センサー1260から出力される出力電圧を示すことができる。第1位置セン
サー1260は磁場の強度に比例するレベルを有する電圧を出力することができる。
を装着した可動部1220が移動せずに固定された初期状態で、第1位置センサー126
0の中心(center)1261の高さ(z=zh)は第1側面1252の上端部12
51から着磁方向であるy軸方向に伸びた仮想の水平面(HS1)の高さと同一であって
もよく、仮想の水平面(HS1)の高さより高くてもよい。この際、第1位置センサー1
260のセンシング要素(sensing element)は第1位置センサー126
0の中心1261に位置することができる。
‘0’に非常に近いが、‘0’ではない値(BO)であってもよい。このような初期状態
で、レンズを装着し、片方向である+z軸方向にのみ移動可能な可動部1220は最も低
く位置する。
図42は実施例によるレンズ駆動装置1200Aにおいて第1コイルに供給される電流に
よる可動部1220の変位を示すグラフであり、横軸は第1コイルに供給される電流を示
し、縦軸は可動部1220の変位を示す。
、可動部1220は+z軸方向に移動することができ、図41に示したように、可動部1
220は+z軸方向に第1距離(z=z1)だけ昇降することができる。この場合、図4
0を参照すると、第1位置センサー1260で感知可能な磁場の強度はB1であってもよ
い。
遮断する場合、可動部1220は図38に示したように初期の位置に下降することができ
る。
、可動部1220の電気力(electric force)が下部及び上部スプリング
1230、1240のスプリング力(mechanical force)より大きくな
ければならない。
た元の初期位置に復帰するためには、電気力が下部及び上部スプリング1230、124
0のスプリング力より小さいか同一でなければならない。すなわち、可動部1220が+
z軸方向に上昇した後、下部及び上部スプリング1230、1240の復元力によって元
の位置に戻ることができる。
含み、上部スプリング1240は第1及び第2上部スプリング1242、1244を含む
ことができる。ここで、下部スプリング1230は第1及び第2下部スプリング1232
、1234の2個に分離されているものとして示されているが、実施例はこれに限られな
い。すなわち、第1及び第2下部スプリング1232、1234は一体に形成されること
もできる。
2個に分離されているものとして示されているが、実施例はこれに限られなく、図2に示
したように、上部スプリング1240は分割されずに一体に形成されることができる。
置200の下側及び上側弾性部材160、150にそれぞれ相当することができるが、実
施例はこれに限られない。
(z=zh)が第1及び第2側面1252、1254のいずれか一方に整列される場合、
第1位置センサー1260で感知される磁場は第1及び第2極性のいずれか一極性のみを
有することができる。したがって、第1又は第2極性の磁場の強度が線形的に変わる場合
、第1位置センサー1260は線形的に変わる第1又は第2極性を有する磁場を感知する
ことができる。
ば、0)から図41に示したように最も高い位置(例えば、Z1)に移動するうち、第1
位置センサー1260で感知される磁場の強度変化はほぼ線形的であることが分かる。
220が移動可能な最大変位(D1)はz1であることが分かる。
200Bの場合、レンズを光軸方向に移動する前の初期状態で、第1位置センサー126
0の中心1261の高さ(z=zh)が着磁方向であるy軸方向に第1側面1252の第
1地点と向き合うか第1地点に整列されることができる。ここで、第1地点は第1側面1
252の上端部1252aと下端部1252bの間のある地点、例えば第1側面1252
の中間地点であってもよい。
極着磁マグネット1250は図38に示したレンズ駆動装置1200Aの両極着磁マグネ
ット1250より一定距離(z2-zh)だけ高く位置することができる。この場合、図
40を参照すると、第1位置センサー1260で感知される第1極性を有する磁場の最低
値はB0より大きなB2であってもよい。
より、可動部1220は図41に示したレンズ駆動装置1200Aのように最大の高さ(
z1)まで上昇することができる。この時、可動部1220の最大上昇高さは下部スプリ
ング1230と上部スプリング1240の弾性係数を調節して変更させることもできる。
ズ駆動装置1200Aと同様に、第1位置センサー1260でセンシングされる磁場の強
度はB2からB1までほぼ線形的に変わることが分かる。
動可能な最大変位(D1)はz1-z2であることが分かる。
1側面1252は第2側面1254上に位置する。
上に位置することができる。このように、両極着磁マグネット1250の側面において長
い第2側面1252が短い第1側面1254より下側に配置されることを除けば、図44
に示したレンズ駆動装置1200Cは図38又は図43に示したレンズ駆動装置1200
A、1200Bと同一であるので、同一の参照符号を使い、重複する部分についての説明
は省略する。
C、1250Dの断面図をそれぞれ示す。
グネット1250C-1、1250C-2を含み、又は非磁性体隔壁1250C-3をさ
らに含むことができる。
グネット1250D-1、1250D-2を含み、又は非磁性体隔壁1250D-3をさ
らに含むことができる。
50C-1、1250C-2は光軸方向に平行な方向(すなわち、z軸方向)に互いに離
隔するか接するように配置されることができる。
50D-2は光軸方向に垂直な方向、又は着磁方向(すなわち、y軸方向)に離隔するか
接するように配置されることもできる。
トであるものとして示されているが、図45bに示した構造を有するマグネットに取り替
えられることもできる。
グ用マグネット1250C-1、1250C-2の間に配置されることができ、図39b
に示したように、非磁性体隔壁1250D-3は第1及び第2センシング用マグネット1
250D-1、1250D-2の間に配置されることができる。非磁性体隔壁1250C
-3、1250D-3は実質的に磁性を持っていない部分であって、極性がほぼない区間
を含むことができ、また空気で満たされるか非磁性体素材を含むことができる。
グネット1250C、1250Cの光軸方向に平行な方向への全長(LT)の5%以上又
は50%以下であってもよい。
位置センサー1260の中心1261の高さ(z=zh)は着磁方向であるy軸方向に非
磁性体隔壁1250C-3(又は、第1側面1252と第2側面1254の間の空間)と
対向するか一致することができる。
センサー1260の中心1261の高さ(z=zh)から着磁方向であるy軸方向に伸び
た仮想の水平面(HS2)に整列されることができる。また、着磁方向であるy軸方向に
第1位置センサー1260の中心1261は第1側面1252の上端部1253と第2側
面1254の下端部1254aの間の空間に位置又は整列されることもできる。また、着
磁方向であるy軸方向に第1位置センサー1260の中心1261は両極着磁マグネット
1250の第2側面1254の下端部1254aに整列されることができる。
極着磁マグネット1250と第1位置センサー1260が配置される場合、第1位置セン
サー1260で感知される第1極性を有する磁場の強度は‘0’であってもよい。
側面1252は第1位置センサー1260と向き合う第1センシング用マグネット125
0A-1、1250C-1の側面に相当することができる。
の第2側面1254は第1位置センサー1260と向き合う第2センシング用マグネット
1250A-2、1250C-2の側面に相当することができる。
2、1254は第1位置センサー1260と向き合う第1センシング用マグネット125
0B-1、1250D-1の側面に相当することができる。
1260の中心1261は着磁方向であるy軸方向に第1側面1252の第1地点と向き
合うかあるいはそれに整列されることができる。ここで、第1地点は第1側面1252の
上端部1252aと下端部1252bの間のある地点、例えば第1側面1252の中間地
点であってもよい。
極着磁マグネット1250は図44に示したレンズ駆動装置1200Cの両極着磁マグネ
ット1250より距離(z2-zh)だけ高く位置することができる。この場合、図40
を参照すると、第1位置センサー1260で感知される第1極性を有する磁場の最低強度
はB2であってもよい。
可動部1220はレンズ駆動装置1200Aのように最大の高さ(z1)まで上昇するこ
とができる。この時、可動部1220の最大上昇高さは機構的なストッパーによって調節
可能である。若しくは、可動部1220の最大上昇高さは下部スプリング1230と上部
スプリング1240の弾性係数を調節することによって変更することができる。
ズ駆動装置1200Aと同様に、第1位置センサー1260で感知される第1極性の磁場
強度の変化はB2からB1までほぼ線形的であることが分かる。
動可能な最大変位(D1)はz1-z2であることが分かる。
、1200B、1200C、1200Dにおいて、可動部1220は光軸の一方向、すな
わち初期位置から+z軸方向にのみ移動することができる。しかし、実施例はこれに限ら
れない。
光軸の両方向、すなわち初期位置から+z軸方向又は-z軸方向に移動することができる
。このような実施例によるレンズ駆動装置の構成及び動作を調べると次のようである。
装置1200Eは初期位置から+z軸方向又は-z軸方向に移動することができる。した
がって、初期位置で可動部1220は下部及び上部スプリング1230、1240によっ
て空中に浮かんでいる状態であってもよい。これを除けば、図47に示したレンズ駆動装
置1200Eの構成要素は前述したレンズ駆動装置1200A、1200Bのそれぞれの
構成要素と同一であるので、各構成要素についての重複する説明は省略する。
220が移動せずに静止した状態で、第1位置センサー1260の中心1261は着磁方
向に第1側面1252の第1地点と向き合うかあるいは第1地点に整列されることができ
る。ここで、第1側面1252の第1地点は第1側面1252の上端部1252aと下端
部1252bの間のある地点、例えば第1側面1252の中間地点であってもよい。
図48に示したレンズ駆動装置1200Fは+z軸方向又は-z軸方向に移動することが
できる。したがって、初期位置で可動部1220が下部及び上部スプリング1230、1
240によって空中に浮かんでいる状態であってもよい。これを除けば、図48に示した
レンズ駆動装置1200Fの構成要素は前述したレンズ駆動装置1200C、1200D
のそれぞれの構成要素と同一であるので、各構成要素についての重複する説明は省略する
。
1260の中心1261は着磁方向に第1側面1252の第1地点と向き合うかあるいは
第1地点に整列されることができる。ここで、第1地点は第1側面1252の上端部12
52aと下端部1252bの間のある地点、例えば第1側面1252の中間地点であって
もよい。
20の上昇及び下降運動は図40と同一であってもよい。したがって、図40を参照して
図47及び図48に示したレンズ駆動装置1200E、2100Fの動作を説明すれば次
のようである。
期状態で、すなわち可動部1220が上昇又は下降移動せずに静止した状態又は初期位置
で、第1位置センサー1260と両極着磁マグネット1250が図47及び図48に示し
たように配置される場合、第1位置センサー1260で感知される第1極性の磁場はB3
となることができる。可動部1220が上昇又は下降移動せずに静止した状態又は初期位
置で、第1位置センサー1260で感知される初期磁場値は第1位置センサー1260と
両極着磁マグネット1250の間の離隔距離などによって変更又は調整されることができ
る。
1コイルに供給される電流による可動部1220の変位を示すグラフであり、横軸は第1
コイルに供給される電流を示し、縦軸は変位を示す。また、縦軸を基準として横軸の右側
は正電流又は正方向電流又は+電流を意味することができ、横軸の左側は逆電流又は逆方
向電流又は-電流を意味することができる。
第1コイルに印加される正電流の強度を増加させることにより、可動部1220は+z軸
方向に距離(z=z4)まで上昇することができる。この場合、図40を参照すると、第
1位置センサー1260で感知される磁場の強度はB3からB4まで増加することができ
る。
期位置で、第1コイルに印加される逆電流の強度を増加させるかあるいは+z軸方向に移
動した後、第1コイルに供給される正電流を減少させる場合、可動部1220は下降移動
することができる。
場合、第1位置センサー1260で感知される磁場の強度はB3からB5まで減少するこ
とができる。また、可動部を+z軸方向に距離(z=z4)まで移動した後、第1コイル
に供給される正電流を減少させた場合、第1位置センサー1260で感知される磁場の強
度はB4からB3に減少することができる。
1位置センサー1260で感知される第1極性を有する磁場の強度はB5とB4の間でほ
ぼ線形的に変わることが分かる。
動部1220の上側変位幅(D3)と下側変位幅(D2)は同一であってもよく、上側変
位幅(D3)が下側変位幅(D2)より大きくてもよい。
に移動する前の初期状態で、第1位置センサー1260の中心1261の高さ(z=zh
)は着磁方向であるy軸方向に前述した第1地点と一致することができる。
軸方向に移動する前の初期状態又は初期位置で、第1位置センサー1260の中心126
1は着磁方向であるy軸方向に前述した第1地点より高い第2地点と向き合うかあるいは
第2地点に整列されることができる。すなわち、上側変位幅(D3)が下側変位幅(D2
)と同一である場合に比べ、上側変位幅(D3)が下側変位幅(D2)より大きな場合、
両極着磁マグネット1250に対する第1位置センサー1260の高さは相対的に高くて
もよい。
変位幅(D3)から下側変位幅(D2)を差し引いた値、Dは可動部1220の全体変位
幅(D2+D3)を意味することができる。
感知される磁場(又は、出力電圧)の強度を第1位置センサー1260と両極着磁マグネ
ット1250-1、1250-2の対向形態別に示すグラフであり、縦軸は磁場(又は、
出力電圧)の強度を示し、横軸は光軸方向への可動部220の移動距離を示す。
ト1250の構造は図39aに示した第1及び第2センシング用マグネット1250A-
1、1250A-2に相当する。しかし、図39aに示した第1及び第2センシング用マ
グネット1250A-1、1250A-2の代わりに図39bに示した第1及び第2セン
シング用マグネット1250B-1、1250B-2又は図46aに示した第1及び第2
センシング用マグネット1250C-1、1250C-2又は図46bに示した第1及び
第2センシング用マグネット1250D-1、1250D-2を第1位置センサー126
0と対向させて配置する場合にも、図50に基づいた下記の説明が適用可能であるのは言
うまでもない。
に変わる強度を有する磁場は第1極性、例えばS極の磁場1272であってもよい。しか
し、実施例はこれに限られない。すなわち、他の実施例によると、第1位置センサー12
60で感知され、線形的に変わる強度を有する磁場は第2極性、例えばN極の磁場127
4であってもよい。
極性ではなくて第2極性であるN極の磁場1274の場合、図50を参照すると、レンズ
を光軸方向であるz軸方向に移動する前の初期状態又は初期位置で、第1位置センサー1
260の中心1261は第2側面1254の第1地点と向き合うかあるいは第1地点に整
列されることができる。
面1254の中間高さであってもよい。その後、レンズを光軸方向である+z軸方向に最
も高く移動するとき、第1位置センサー1260の中心1261は第2側面1254の下
端部より低い地点と一致することができる。この時、第1位置センサー1260の中心1
261の高さは第2側面1254の下端部の高さより低くてもよい。
ある第2区間BP2よりも大きい。これは、S極性を有する第1側面1252の第1長さ
(L1)がN極性を有する第2側面1254の第2長さ(L2)よりも長いからである。
極性を有し、第2長さ(L2)を有する第2側面1254がS極性を有する場合、図50
に示した参照符号1272はN極性の磁場に相当し、1274はS極性の磁場に相当する
ことができる。図示されてはいないが、前記のように極が変更される場合、Y軸の極性は
反対になることができる。
すグラフであり、各グラフにおいて横軸は磁場を示し、縦軸は変位を示す。
磁場を感知することができるように第1位置センサー1260と両極着磁マグネット12
50を配置させた場合、図51aに示したように、感知された磁場の変化が微細な場合に
も変位を認識することができる。
区間BP2の磁場を感知することができるように、位置センサー1260と両極着磁マグ
ネット1250を配置する場合、図51bに示したように、感知された磁場の変化が微細
な場合、微細な変位を認識することができる程度が図51aの場合より小さい。すなわち
、図51aの場合と図51bの場合は傾きが互いに異なることができる。
場を位置センサー1260が感知するように、位置センサー1260と両極着磁マグネッ
ト1250を配置する場合、ずっと高い解像度で変位を感知することができる。すなわち
、磁場の強度が変わる線形区間が広いほどコード化した磁場に対する変位の変化を正確に
チェックすることができる。
する磁場の強度は7ビット~12ビットでコード化できる。この場合、制御部(図示せず
)はルックアップテーブル(図示せず)を含み、可動部1220の変位を位置センサー1
260によって精密に制御することができる。
ができる。例えば、図40を参照すると、最小磁場(B0)から最大磁場(B1)までの
磁場の強度は変位(z)とマッチされて7ビット~12ビットでコード化できる。したが
って、可動部1220の変位を制御しようとする場合、該当のコード値を探し、制御部は
探されたコード値とマッチする位置に可動部1220を光軸方向に移動させることができ
る。このような制御部はイメージセンサー内に配置又は含まれることができるかあるいは
イメージセンサーが実装される回路基板に配置又は含まれることができる。
250の光軸方向に平行なz軸方向への長さ(LT)は可動部1220の移動可能な幅、
すなわち最大変位の1.5倍以上であってもよい。例えば、図38及び図41を参照する
と、可動部1220の移動可能な幅である最大変位がz1であるので、両極着磁マグネッ
ト1250の長さ(LT)は1.5×z1以上であってもよい。
置センサー1260が結合、接触、支持、仮固定、挿入又は装着され、可動部1220に
両極着磁マグネット1250が結合、接触、支持、固定、仮固定、挿入又は装着される場
合を例として説明したが、実施例はこれに限られない。
、支持、仮固定、挿入又は装着され、固定部1210に両極着磁マグネット1250が結
合、接触、支持、固定、仮固定、挿入又は装着されることもできる。この場合、前述した
説明が適用されることができる。
説明するためのグラフであり、横軸は移動距離を示し、縦軸は磁場の強度を示す。
への第1及び第2長さ(L1、L2)が互いに同一である場合、可動部1220を移動す
ることによって位置センサー1260で感知される磁場の変化は図52に示したようであ
り得る。この時、図52を参照すると、位置センサー1260で感知される磁場は相互領
域(MZ:mutual zone)を中心に極性が反対となる。
サー1260で感知された磁場の強度が‘0’に固定された領域である。このような相互
領域(MZ)はソフトウェア的にも処理することができないことがあり得る。したがって
、位置センサー1260は相互領域(MZ)で磁場の強度を‘0’としてのみ感知するし
かないため、この区間(MZ)で移動する可動部1220の移動距離を正確に測定及び制
御することができない。
(L2)より長く形成し、線形的に変わる第1極性の磁場の強度を位置センサー1260
が感知するようにするため、前述した比較例のような問題を事前に防止することができる
。これにより、レンズ駆動装置1200A~1200Fの設計マージン及び信頼性を向上
させることができる。
サー1260で感知される磁場の変化を示すグラフであり、横軸は移動距離を示し、縦軸
は磁場を示す。
極着磁マグネット1250の全長(LT)の50%以下に減らす場合、図53に示したよ
うに、相互領域(MZ)がほとんど除去されることができる。この時、位置センサー12
60の中心1261の高さ(z=zh)は両極着磁マグネット1250の中心の高さと一
致するかあるいは同一であってもよい。
ほぼ線形的に変わることができる。よって、位置センサー1260は可動部1220の移
動によって線形的に変わる第1極性の磁場1282と第2極性の磁場1284を全て感知
することができるので、第1及び第2極性の一極性のみを有する線形的に変わる強度を有
する磁場を位置センサー1260が感知するときより相対的に高い解像度を有することが
できる。
グネット1250の全長(LT)の10%以上にする場合、磁場の相互領域(MZ)と線
形区間が明確に分離されるので、位置センサー1260が第1及び第2極性の一極性を持
って線形的に変わる強度を有する磁場のみを感知することができる。
、必ず一実施例にのみ限定されるものではない。さらに、各実施例で例示した特徴、構造
、効果などは実施例が属する分野の通常の知識を有する者によって他の実施例でも組み合
わせるか変形して実施可能である。したがって、このような組合せ及び変形に係る内容は
本発明の範囲に含まれるものに解釈しなければならないであろう。
に把握することができるレンズ駆動装置に使われる。
Claims (19)
- ハウジングと、
前記ハウジング内に配置され、第1方向に移動可能なボビンと、
前記ボビンに配置されるセンシング用マグネットと、
前記ボビンに配置される第1コイルと、
前記ハウジングに配置される第1回路基板と、
前記第1回路基板と電気的に連結され、前記ボビンの変位を感知するための第1位置センサーと、
前記ハウジングの下に配置される第2回路基板と、
前記ボビンの下部及び前記ハウジングの下部と結合する下側弾性部材と、
前記第1回路基板と前記第2回路基板を電気的に連結し、前記ハウジングを支持する弾性支持部材とを含み、
前記センシング用マグネットの中心は光軸に垂直な方向に前記第1コイルと重畳せず、
前記下側弾性部材はソルダーによって前記第1回路基板に結合される、レンズ駆動装置。 - 前記弾性支持部材の一部に配置されるダンパーを含む、請求項1に記載のレンズ駆動装置。
- 前記ハウジングに配置される第1マグネットを含み、
前記第1コイルと前記第1マグネットとの相互作用によって前記ボビンは前記第1方向に移動する、請求項1又は2に記載のレンズ駆動装置。 - 前記第1マグネットと対向し、前記第2回路基板と電気的に連結される第2コイルを含む、請求項3に記載のレンズ駆動装置。
- 前記下側弾性部材は、第1弾性部材及び第2弾性部材を含み、
前記第1弾性部材の第1部分は前記第1コイルの一端と連結され、前記第1弾性部材の第2部分は前記第1回路基板と電気的に連結され、
前記第2弾性部材の第1部分は前記第1コイルの他端と連結され、前記第2弾性部材の第2部分は前記第1回路基板と電気的に連結される、請求項3に記載のレンズ駆動装置。 - 前記ボビンの外周面にはマグネット装着凹部が形成され、
前記センシング用マグネットは前記マグネット装着凹部内に配置される、請求項1~5のいずれか一項に記載のレンズ駆動装置。 - 前記センシング用マグネットの上面は前記第1コイルよりも上側に配置される、請求項1~6のいずれか一項に記載のレンズ駆動装置。
- 前記第2回路基板の下に配置されるベースと、
前記第2回路基板と電気的に連結され、前記ハウジングが前記第1方向に垂直な第2及び/又は第3方向に移動することを感知する第2位置センサー及び第3位置センサーとを含む、請求項1~7のいずれか一項に記載のレンズ駆動装置。 - 前記ベースの上面には前記第2位置センサーが配置されるための第2位置センサー装着溝が形成され、
前記ベースの上面には前記第3位置センサーが配置されるための第3位置センサー装着溝が形成される、請求項8に記載のレンズ駆動装置。 - 前記第2回路基板は、前記ベースの外側面に配置される端子面及び前記端子面に形成される複数の端子を含む、請求項8に記載のレンズ駆動装置。
- 前記ハウジングは前記弾性支持部材が通過するための貫通ホールを含み、
前記ダンパーの少なくとも一部は前記ハウジングの前記貫通ホールと前記弾性支持部材との間に配置される、請求項2に記載のレンズ駆動装置。 - 前記第1位置センサーは、前記第1コイルを駆動するためのドライバーを含む、請求項1~11のいずれか一項に記載のレンズ駆動装置。
- 前記弾性支持部材は4個のワイヤを含み、
前記4個のワイヤは前記ハウジングの4個の角部にそれぞれ配置される、請求項1~12のいずれか一項に記載のレンズ駆動装置。 - 前記第1マグネットは互いに離隔される4個のマグネットユニットを含み、
前記第2コイルは前記4個のマグネットユニットに対応する4個のコイルユニットを含む、請求項4に記載のレンズ駆動装置。 - 前記第1回路基板は、前記第1位置センサーに電源を供給するための第1及び第2端子、クロック信号のための第3端子、及びデータのための第4端子を含む、請求項12に記載のレンズ駆動装置。
- 前記ボビンの上部及び前記ハウジングの上部と結合する上側弾性部材を含む、請求項1~15のいずれか一項に記載のレンズ駆動装置。
- 前記ハウジングは4個の側面及び角部を含み、
前記第1回路基板の少なくとも一部は前記ハウジングの前記4個の側面のうちの少なくとも一つに配置される、請求項1~16のいずれか一項に記載のレンズ駆動装置。 - ハウジングと、
前記ハウジング内に配置されるボビンと、
前記ハウジングに配置される第1マグネットと、
前記ボビンに配置されるセンシング用マグネットと、
前記ボビンに配置され、前記第1マグネットとの相互作用によって前記ボビンを第1方向に移動させる第1コイルと、
前記ハウジングに配置される第1回路基板と、
前記第1回路基板と電気的に連結され、前記ボビンの変位を感知するための第1位置センサーと、
前記ハウジングの下に配置される第2回路基板と、
前記ボビンの下部及び前記ハウジングの下部と結合する下側弾性部材と、
前記第1回路基板と前記第2回路基板とを電気的に連結し、前記ハウジングを支持する弾性支持部材と、
前記第1マグネットと対向し、前記第2回路基板と電気的に連結される第2コイルと、を含み、
前記センシング用マグネットの中心は光軸に垂直な方向に前記第1コイルと重畳しない、レンズ駆動装置。 - レンズバレルと、
請求項1~17のいずれか一項に記載のレンズ駆動装置と、
イメージセンサーとを含む、カメラモジュール。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023173582A JP7553677B2 (ja) | 2014-07-03 | 2023-10-05 | レンズ駆動装置 |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2014-0082957 | 2014-07-03 | ||
| KR1020140082957A KR102330672B1 (ko) | 2014-07-03 | 2014-07-03 | 렌즈 구동 장치 |
| KR1020140109728A KR102220503B1 (ko) | 2014-08-22 | 2014-08-22 | 렌즈 구동 장치 |
| KR10-2014-0109728 | 2014-08-22 | ||
| JP2016575732A JP6669677B2 (ja) | 2014-07-03 | 2015-06-23 | レンズ駆動装置 |
| JP2020031778A JP6972209B2 (ja) | 2014-07-03 | 2020-02-27 | レンズ駆動装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020031778A Division JP6972209B2 (ja) | 2014-07-03 | 2020-02-27 | レンズ駆動装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023173582A Division JP7553677B2 (ja) | 2014-07-03 | 2023-10-05 | レンズ駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022023973A JP2022023973A (ja) | 2022-02-08 |
| JP7364644B2 true JP7364644B2 (ja) | 2023-10-18 |
Family
ID=55019580
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016575732A Active JP6669677B2 (ja) | 2014-07-03 | 2015-06-23 | レンズ駆動装置 |
| JP2020031778A Active JP6972209B2 (ja) | 2014-07-03 | 2020-02-27 | レンズ駆動装置 |
| JP2021179777A Active JP7364644B2 (ja) | 2014-07-03 | 2021-11-02 | レンズ駆動装置 |
| JP2023173582A Active JP7553677B2 (ja) | 2014-07-03 | 2023-10-05 | レンズ駆動装置 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016575732A Active JP6669677B2 (ja) | 2014-07-03 | 2015-06-23 | レンズ駆動装置 |
| JP2020031778A Active JP6972209B2 (ja) | 2014-07-03 | 2020-02-27 | レンズ駆動装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023173582A Active JP7553677B2 (ja) | 2014-07-03 | 2023-10-05 | レンズ駆動装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (4) | US10042140B2 (ja) |
| JP (4) | JP6669677B2 (ja) |
| CN (3) | CN106575025B (ja) |
| WO (1) | WO2016003103A1 (ja) |
Families Citing this family (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102148988B1 (ko) * | 2013-07-12 | 2020-08-27 | 엘지이노텍 주식회사 | 카메라 모듈 |
| CN110531480B (zh) | 2014-03-05 | 2022-10-11 | Lg伊诺特有限公司 | 透镜移动单元和包含该透镜移动单元的摄像头模块 |
| CN106575025B (zh) * | 2014-07-03 | 2020-01-31 | Lg伊诺特有限公司 | 透镜驱动装置 |
| US9791713B2 (en) | 2014-07-24 | 2017-10-17 | Lg Innotek Co., Ltd. | Lens moving apparatus |
| KR102311663B1 (ko) | 2015-03-18 | 2021-10-13 | 엘지이노텍 주식회사 | 렌즈 구동 장치, 및 이를 포함하는 카메라 모듈 |
| KR102532325B1 (ko) * | 2016-05-30 | 2023-05-15 | 엘지이노텍 주식회사 | 렌즈 구동 장치, 및 이를 포함하는 카메라 모듈과 광학 기기 |
| CN114415315B (zh) * | 2016-05-10 | 2024-09-17 | Lg伊诺特有限公司 | 透镜驱动设备、摄像机模块和便携式设备 |
| KR101806888B1 (ko) * | 2016-09-09 | 2017-12-12 | (주)알비케이이엠디 (Rbk Emd Co.,Ltd.) | 듀얼 카메라 모듈 |
| CN106443949B (zh) | 2016-09-12 | 2024-12-27 | 上海比路电子股份有限公司 | 一种透镜驱动装置 |
| FR3060892B1 (fr) * | 2016-12-21 | 2021-01-22 | Mmt ag | Actionneur mecatronique |
| WO2018123815A1 (ja) * | 2016-12-28 | 2018-07-05 | アルプス電気株式会社 | レンズ駆動装置 |
| KR102250447B1 (ko) * | 2017-03-15 | 2021-05-11 | 삼성전자주식회사 | 전기물을 포함하는 전자 장치 |
| EP4141536B1 (en) | 2017-03-30 | 2024-05-01 | Lg Innotek Co., Ltd. | Dual lens driving apparatus and camera module |
| KR101886362B1 (ko) | 2017-05-19 | 2018-08-09 | 주식회사 동운아나텍 | 카메라 모듈용 액츄에이터 이동감지 소자와 그들을 포함하는 카메라 모듈용 유연성 회로기판 |
| KR101973095B1 (ko) * | 2017-05-31 | 2019-04-26 | 주식회사 동운아나텍 | 카메라 모듈에서의 데이터 전송방법 |
| JP6947969B2 (ja) * | 2017-06-19 | 2021-10-13 | ミツミ電機株式会社 | レンズ駆動装置、カメラモジュール、及びカメラ搭載装置 |
| JP6947968B2 (ja) * | 2017-06-19 | 2021-10-13 | ミツミ電機株式会社 | レンズ駆動装置、カメラモジュール、及びカメラ搭載装置 |
| KR102485461B1 (ko) * | 2017-08-07 | 2023-01-06 | 엘지이노텍 주식회사 | 렌즈 구동 장치, 카메라 모듈 및 광학 기기 |
| EP3674793A4 (en) | 2017-08-23 | 2021-05-19 | LG Innotek Co., Ltd. | LENS CONTROLLER, INCLUDING CAMERA MODULE, AND OPTICAL DEVICE |
| KR102467391B1 (ko) * | 2017-11-10 | 2022-11-14 | 엘지이노텍 주식회사 | 렌즈 구동 장치 및 이를 포함하는 카메라 모듈 및 광학 기기 |
| EP3677964B1 (en) * | 2017-08-30 | 2024-12-04 | LG Innotek Co., Ltd. | Lens driving device and camera module including same |
| KR102435025B1 (ko) | 2017-09-25 | 2022-08-23 | 삼성전자주식회사 | 다른 자기장의 방향을 갖는 복수의 구동부를 포함하는 카메라 모듈 |
| CN209803439U (zh) * | 2018-07-25 | 2019-12-17 | 台湾东电化股份有限公司 | 驱动机构 |
| EP4474886A2 (en) | 2018-08-31 | 2024-12-11 | Lg Innotek Co. Ltd | Lens driving device, and camera module and optical device including same |
| WO2020060219A1 (ko) * | 2018-09-21 | 2020-03-26 | 엘지이노텍(주) | 렌즈 구동 장치, 및 이를 포함하는 카메라 모듈 및 광학 기기 |
| JP7553444B2 (ja) * | 2018-11-26 | 2024-09-18 | エルジー イノテック カンパニー リミテッド | レンズ駆動装置及びこれを含むカメラモジュール及び光学機器 |
| KR102154200B1 (ko) * | 2018-12-07 | 2020-09-09 | 삼성전기주식회사 | 카메라 모듈 |
| EP4130836A3 (en) * | 2018-12-27 | 2023-05-24 | Tdk Taiwan Corp. | Optical system |
| CN111600455A (zh) | 2019-02-21 | 2020-08-28 | 三赢科技(深圳)有限公司 | 音圈马达及应用其的摄像头模组和电子装置 |
| US11300803B2 (en) | 2019-03-06 | 2022-04-12 | Tdk Taiwan Corp. | Optical element driving mechanism |
| CN112055102B (zh) * | 2019-06-06 | 2021-10-15 | 华为技术有限公司 | 一种摄像头模组、摄像机以及移动终端 |
| WO2021049853A1 (ko) * | 2019-09-09 | 2021-03-18 | 엘지이노텍 주식회사 | 렌즈 구동 장치, 카메라 모듈 및 광학 기기 |
| JP2022166776A (ja) | 2021-04-21 | 2022-11-02 | キヤノン株式会社 | 振れ補正装置及びそれを有するレンズ鏡筒 |
| CN115842459A (zh) | 2022-03-09 | 2023-03-24 | 新思考电机有限公司 | 透镜驱动装置、照相机装置及电子设备 |
| CN115079485A (zh) * | 2022-07-19 | 2022-09-20 | 诚瑞光学(南宁)有限公司 | 镜头驱动装置 |
| JP7518416B2 (ja) | 2022-11-30 | 2024-07-18 | ミツミ電機株式会社 | 光学素子駆動装置、カメラモジュール及びカメラ搭載装置 |
| CN116594142B (zh) * | 2023-02-17 | 2024-04-16 | 上海比路电子股份有限公司 | 透镜驱动装置、摄像模组及移动终端 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013210550A (ja) | 2012-03-30 | 2013-10-10 | Mitsumi Electric Co Ltd | レンズホルダ駆動装置、カメラモジュール、およびカメラ付き携帯端末 |
| KR101389375B1 (ko) | 2013-03-29 | 2014-04-28 | 자화전자(주) | 카메라 렌즈 모듈 구동 장치 |
| JP2014219675A (ja) | 2013-05-06 | 2014-11-20 | 台湾東電化股▲ふん▼有限公司 | 3軸閉ループフィードバック制御ユニットを有する電磁式レンズ駆動装置 |
Family Cites Families (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR900000249B1 (ko) | 1987-11-30 | 1990-01-24 | 주식회사 금성사 | 리얼타임 거리센서 |
| US4998802A (en) * | 1988-06-03 | 1991-03-12 | Kabushiki Kaisha Sankyo Seiki Seisakusho | Objective lens driving device in an optical pickup |
| JPH08160484A (ja) | 1994-12-05 | 1996-06-21 | Nikon Corp | 像振れ補正装置 |
| JP4747520B2 (ja) * | 2004-06-15 | 2011-08-17 | ソニー株式会社 | レンズ駆動機構及び撮像装置 |
| US7298562B2 (en) * | 2005-09-02 | 2007-11-20 | Nidec Sankyo Corporation | Lens drive unit |
| KR100770680B1 (ko) | 2005-12-20 | 2007-10-29 | 삼성전기주식회사 | 모바일용 카메라모듈 패키지 및 이에 사용되는 액추에이터 |
| EP2690765B1 (en) * | 2006-12-13 | 2020-05-06 | LG Innotek Co., Ltd. | Lens driving apparatus |
| JP2008197311A (ja) * | 2007-02-13 | 2008-08-28 | Alps Electric Co Ltd | レンズ駆動装置 |
| JP4981547B2 (ja) * | 2007-06-28 | 2012-07-25 | オリンパスイメージング株式会社 | 駆動装置および撮像装置 |
| CN101483376B (zh) * | 2008-01-10 | 2011-05-18 | 财团法人工业技术研究院 | 音圈马达 |
| JP2011521285A (ja) * | 2008-05-14 | 2011-07-21 | ハイソニック カンパニー,リミテッド | 振れ補正機能を備えた映像撮影装置 |
| JP2011039481A (ja) * | 2009-03-26 | 2011-02-24 | Sanyo Electric Co Ltd | レンズ駆動装置 |
| JP5170014B2 (ja) | 2009-06-29 | 2013-03-27 | パルステック工業株式会社 | 光ヘッド装置における対物レンズの支持機構 |
| JP5846346B2 (ja) * | 2009-08-21 | 2016-01-20 | ミツミ電機株式会社 | カメラの手振れ補正装置 |
| JP5620672B2 (ja) | 2009-12-01 | 2014-11-05 | 日本電産サンキョー株式会社 | レンズ駆動装置 |
| JP5489747B2 (ja) * | 2010-01-26 | 2014-05-14 | 日本電産サンキョー株式会社 | レンズ駆動装置 |
| US8254769B2 (en) | 2010-03-04 | 2012-08-28 | Tdk Taiwan Corp. | Anti-shake structure for auto-focus modular |
| US8638510B2 (en) * | 2010-07-06 | 2014-01-28 | Lg Innotek Co., Ltd. | Voice coil motor, coil block for voice coil motor, method of manufacturing the coil block, and voice coil motor having the coil block |
| KR101208599B1 (ko) | 2010-12-03 | 2012-12-06 | 엘지이노텍 주식회사 | 카메라 모듈 |
| JP2012177754A (ja) | 2011-02-25 | 2012-09-13 | Shicoh Engineering Co Ltd | レンズ駆動装置、オートフォーカスカメラ及びカメラ付きモバイル端末装置 |
| JP2012177753A (ja) | 2011-02-25 | 2012-09-13 | Shicoh Engineering Co Ltd | レンズ駆動装置、オートフォーカスカメラ及びカメラ付きモバイル端末装置 |
| KR101944280B1 (ko) * | 2011-05-18 | 2019-01-31 | 엘지이노텍 주식회사 | 카메라 모듈 |
| KR101860156B1 (ko) * | 2011-06-03 | 2018-05-21 | 엘지이노텍 주식회사 | 카메라 모듈 |
| JP2012255904A (ja) * | 2011-06-09 | 2012-12-27 | Panasonic Corp | レンズアクチュエータ |
| US20130089138A1 (en) | 2011-06-27 | 2013-04-11 | Qualcomm Incorporated | Coding syntax elements using vlc codewords |
| JP5821356B2 (ja) | 2011-07-15 | 2015-11-24 | ミツミ電機株式会社 | レンズ駆動装置 |
| CN102334058B (zh) * | 2011-07-20 | 2013-12-25 | 香港应用科技研究院有限公司 | 用于小型成像装置的磁体结构 |
| US9883164B2 (en) | 2011-08-03 | 2018-01-30 | Sony Mobile Communications Inc. | Optimizing usage of image sensors in a stereoscopic environment |
| JP5789895B2 (ja) * | 2011-08-05 | 2015-10-07 | 株式会社タムロン | 位置検出ユニット、及びそれを備えたレンズユニット、カメラ、及びレンズユニットの製造方法、位置検出方法 |
| US9151963B2 (en) * | 2011-08-24 | 2015-10-06 | Mitsumi Electric Co., Ltd. | Lens holder driving device including damper compound suppressing undesired resonance |
| US8698952B2 (en) * | 2011-10-31 | 2014-04-15 | Lg Innotek Co., Ltd. | Camera module |
| KR101877898B1 (ko) * | 2011-11-18 | 2018-08-09 | 엘지이노텍 주식회사 | 보이스 코일 모터 및 이의 구동 방법 |
| TWI537627B (zh) * | 2011-12-29 | 2016-06-11 | 鴻海精密工業股份有限公司 | 音圈馬達及鏡頭模組 |
| JP5905275B2 (ja) * | 2012-01-30 | 2016-04-20 | 日本電産コパル株式会社 | レンズ駆動装置 |
| JP5884976B2 (ja) * | 2012-01-31 | 2016-03-15 | ミツミ電機株式会社 | レンズホルダ駆動装置 |
| JP5007373B1 (ja) * | 2012-03-14 | 2012-08-22 | アルプス電気株式会社 | レンズ駆動装置 |
| KR101959541B1 (ko) | 2012-08-21 | 2019-03-18 | 엘지이노텍 주식회사 | 보이스 코일 모터 |
| JP2013250299A (ja) * | 2012-05-30 | 2013-12-12 | Alps Electric Co Ltd | 手振れ補正機能付きレンズ駆動装置 |
| JP5895054B2 (ja) * | 2012-06-07 | 2016-03-30 | 旭化成エレクトロニクス株式会社 | 位置検出装置 |
| KR101993904B1 (ko) * | 2012-06-25 | 2019-06-28 | 엘지이노텍 주식회사 | 복합 기능 보이스 코일 모터 |
| KR101343197B1 (ko) | 2012-09-07 | 2013-12-19 | 삼성전기주식회사 | 카메라 모듈 |
| JP2014126668A (ja) * | 2012-12-26 | 2014-07-07 | Mitsumi Electric Co Ltd | レンズ駆動装置、カメラモジュール、及びカメラ付き携帯端末 |
| JP3187257U (ja) | 2013-09-06 | 2013-11-14 | アルプス電気株式会社 | レンズ駆動装置 |
| CN203673131U (zh) * | 2013-12-06 | 2014-06-25 | 瑞声声学科技(苏州)有限公司 | 自动变焦马达 |
| CN103792640B (zh) * | 2014-01-10 | 2016-08-31 | 瑞声声学科技(常州)有限公司 | 镜头驱动装置 |
| US9360653B2 (en) * | 2014-05-09 | 2016-06-07 | Lg Innotek Co., Ltd. | Lens moving apparatus |
| TWI516855B (zh) * | 2014-05-15 | 2016-01-11 | 台灣東電化股份有限公司 | 三軸閉迴路防手震結構 |
| JP2015219410A (ja) | 2014-05-19 | 2015-12-07 | 岩谷産業株式会社 | レンズ駆動装置 |
| CN106575025B (zh) * | 2014-07-03 | 2020-01-31 | Lg伊诺特有限公司 | 透镜驱动装置 |
-
2015
- 2015-06-23 CN CN201580041240.9A patent/CN106575025B/zh active Active
- 2015-06-23 JP JP2016575732A patent/JP6669677B2/ja active Active
- 2015-06-23 WO PCT/KR2015/006343 patent/WO2016003103A1/ko active Application Filing
- 2015-06-23 CN CN201911392720.6A patent/CN111399246B/zh active Active
- 2015-06-23 US US15/321,940 patent/US10042140B2/en active Active
- 2015-06-23 CN CN201911392732.9A patent/CN111399247B/zh active Active
-
2018
- 2018-07-02 US US16/025,327 patent/US11131830B2/en active Active
-
2020
- 2020-02-27 JP JP2020031778A patent/JP6972209B2/ja active Active
-
2021
- 2021-08-13 US US17/445,052 patent/US11726296B2/en active Active
- 2021-11-02 JP JP2021179777A patent/JP7364644B2/ja active Active
-
2023
- 2023-06-29 US US18/344,156 patent/US20230341655A1/en active Pending
- 2023-10-05 JP JP2023173582A patent/JP7553677B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013210550A (ja) | 2012-03-30 | 2013-10-10 | Mitsumi Electric Co Ltd | レンズホルダ駆動装置、カメラモジュール、およびカメラ付き携帯端末 |
| KR101389375B1 (ko) | 2013-03-29 | 2014-04-28 | 자화전자(주) | 카메라 렌즈 모듈 구동 장치 |
| JP2014219675A (ja) | 2013-05-06 | 2014-11-20 | 台湾東電化股▲ふん▼有限公司 | 3軸閉ループフィードバック制御ユニットを有する電磁式レンズ駆動装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106575025A (zh) | 2017-04-19 |
| JP2023182742A (ja) | 2023-12-26 |
| JP2017523462A (ja) | 2017-08-17 |
| JP7553677B2 (ja) | 2024-09-18 |
| US20170146773A1 (en) | 2017-05-25 |
| CN111399247A (zh) | 2020-07-10 |
| US10042140B2 (en) | 2018-08-07 |
| CN111399247B (zh) | 2022-06-03 |
| JP6669677B2 (ja) | 2020-03-18 |
| US20210373280A1 (en) | 2021-12-02 |
| US11726296B2 (en) | 2023-08-15 |
| JP2020144364A (ja) | 2020-09-10 |
| CN111399246B (zh) | 2023-07-04 |
| WO2016003103A1 (ko) | 2016-01-07 |
| US11131830B2 (en) | 2021-09-28 |
| US20230341655A1 (en) | 2023-10-26 |
| US20180307001A1 (en) | 2018-10-25 |
| JP6972209B2 (ja) | 2021-11-24 |
| JP2022023973A (ja) | 2022-02-08 |
| CN106575025B (zh) | 2020-01-31 |
| CN111399246A (zh) | 2020-07-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7364644B2 (ja) | レンズ駆動装置 | |
| KR102548364B1 (ko) | 렌즈 구동 장치 | |
| KR102220503B1 (ko) | 렌즈 구동 장치 | |
| JP6615770B2 (ja) | レンズ駆動装置及びこれを含むカメラモジュール | |
| KR102458711B1 (ko) | 렌즈 구동 장치 및 이를 포함하는 카메라 모듈 | |
| KR102311664B1 (ko) | 렌즈 구동 장치 | |
| CN113170041B (zh) | 透镜驱动装置及包括该透镜驱动装置的摄像机模块和光学设备 | |
| KR102753502B1 (ko) | 초점 제어 및 손떨림 보정 구동 장치 | |
| KR102385409B1 (ko) | 렌즈 구동 장치 | |
| KR20220011767A (ko) | 렌즈 구동 장치 및 이를 포함하는 카메라 모듈 및 광학 기기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211111 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220928 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221101 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20230201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230403 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230509 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230808 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230905 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231005 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7364644 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |