JP4981547B2 - 駆動装置および撮像装置 - Google Patents
駆動装置および撮像装置 Download PDFInfo
- Publication number
- JP4981547B2 JP4981547B2 JP2007170969A JP2007170969A JP4981547B2 JP 4981547 B2 JP4981547 B2 JP 4981547B2 JP 2007170969 A JP2007170969 A JP 2007170969A JP 2007170969 A JP2007170969 A JP 2007170969A JP 4981547 B2 JP4981547 B2 JP 4981547B2
- Authority
- JP
- Japan
- Prior art keywords
- vibrator
- moving body
- vibration
- driving
- axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B5/02—Lateral adjustment of lens
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
Description
図1は、本実施の形態のカメラの主に電気的なシステム構成を概略的に示すブロック図である。
図2は、撮像ユニット30の構成を示す縦断側面図である。
図3(A)〜(D)は、振動子の動作原理を示す模式図である。図4は、上記振動子と被駆動体である移動体との斜視図である。
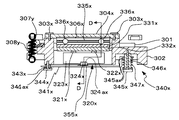
図5は、本実施の形態の防振ユニットの構成を示す分解斜視図であり、図6は、図5の防振ユニットの各構成要素の形状を簡略化して示し、撮影光軸前方側から見た概略の防振ユニット配置図である。図7は、図6のA−A断面図である。図8は、図6のB−B断面図である。図9は、図6のC−C断面図である。図10は、図7のD−D断面図である。
なお、図11〜15は、X軸振動子の振動がY軸振動子側に伝わる状態を示しており、そのうち、図11は、防振ユニットを撮影光軸後方側から見た図である。図12は、図11のE−E断面を示し、図13は、図11のF−F断面を示し、図14は、図11のG−G断面を示し、さらに、図15は、図11のH−H断面を示している。また、図16(A)〜(H)は、それぞれX軸駆動機構のX軸振動子の振動動作状態を示す図である。
図17は、静止画撮影時のブレ補正動作を示す概略フローチャートである。なお、本動作は、レリーズSWにより撮影準備開始が指示される以前、即ち、レリーズSWの1段目レリーズ操作である1Rオンの前においては行われず、1Rオン操作されると、即ち、撮影準備開始が指示されると開始する。
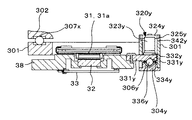
図18は、本実施形態のカメラに適用される防振ユニットの要部を撮影光軸後方側から見た簡略図である。図19は、図18のJ−J断面を示し、図20は、図18のK−K断面を示し、図21は、図18のM−M断面を示し、さらに、図22は、図18のN−N断面を示している。
38 …Y枠(第二の移動体)
301 …X枠(第一の移動体)
302 …フレーム(固定部材)
304x,304y…軸受け(ガイド部)
307x,307y…ボール
320x…X軸振動子(第1の振動子)
320y…Y軸振動子(第2の振動子)
321x,322x…駆動子(駆動部)
321y,322y…駆動子(駆動部)
330x…摺動体(第1の移動体部)
330y…摺動体(第2の移動体部)
331x,331y…軸受け
332x,332y…摺動板
336x,336y…ボール
340x,340y…押圧機構
342x…保持部(第1の保持部)
342y…保持部(第2の保持部)
X軸方向…第1の方向
Y軸方向…第2の方向
Claims (7)
- 所定の周波電圧が印加されることにより駆動部に楕円振動を生ずる第1の振動子と、
前記第1の振動子を保持する第1の保持部を有する固定部材と、
前記第1の振動子の前記駆動部が押圧され、かつ、前記固定部材が有するガイド部により第1の方向に移動方向が規制され、前記第1の振動子の楕円振動により駆動されて前記固定部材に対して前記第1の方向に移動する第1の移動体部が固定されている第1の移動体と、
前記第1の移動体に設けられた第2の保持部に保持されて、所定の周波電圧が印加されることにより駆動部に楕円振動を生ずる第2の振動子と、
前記第2の振動子の駆動部が押圧され、かつ、前記第1の移動体が有するガイド部により第1の方向と異なる第2の方向に移動方向が規制され、前記第2の振動子の楕円振動により駆動されて前記第1の移動体に対して第2の方向に移動する第2の移動体部が固定されている第2の移動体と、
を備えており、前記第1の振動子と前記第2の振動子は略同一の共振周波数をもち、前記第1の移動体部と第2の移動体部は、それらの剛性および密度の内、少なくとも一方が異なることを特徴とする駆動装置。 - 前記第1の移動体部と第2の移動体部の弾性率が異なることを特徴とする請求項1記載の駆動装置。
- 前記第1の移動体部と第2の移動体部の断面二次モーメントが異なることを特徴とする請求項1記載の駆動装置。
- 所定の周波電圧が印加されることにより駆動部に楕円振動を生ずる第1の振動子と、
前記第1の振動子を保持する第1の保持部を有する固定部材と、
前記第1の振動子の前記駆動部が押圧され、かつ、前記固定部材が有するガイド部により第1の方向に移動方向が規制され、前記第1の振動子の楕円振動により駆動されて前記固定部材に対して前記第1の方向に移動する第1の移動体部が固定されている第1の移動体と、
前記第1の移動体に設けられた第2の保持部に保持されて、所定の周波電圧が印加されることにより駆動部に楕円振動を生ずる第2の振動子と、
前記第2の振動子の駆動部が押圧され、かつ、前記第1の移動体が有するガイド部により第1の方向と異なる第2の方向に移動方向が規制され、前記第2の振動子の楕円振動により駆動されて前記第1の移動体に対して第2の方向に移動する第2の移動体部が固定されている第2の移動体と、
を備えており、前記第1の振動子と前記第2の振動子は略同一の共振周波数をもち、前記第1の移動体部と第2の移動体部は、前記第1の移動体、第2の移動体への固定方法が異なることを特徴とする駆動装置。 - 前記第1の移動体部と第2の移動体部の固定方法により前記第1の移動体部と第2の移動体部の屈曲振動状態を異ならせることを特徴とする請求項4記載の駆動装置。
- 所定の周波電圧が印加されることにより駆動部に楕円振動を生ずる第1の振動子と、
前記第1の振動子を保持する第1の保持部を有する固定部材と、
前記第1の振動子の前記駆動部が押圧され、かつ、前記固定部材が有するガイド部により第1の方向に移動方向が規制され、前記第1の振動子の楕円振動により駆動されて前記固定部材に対して前記第1の方向に移動する第1の移動体部が固定されている第1の移動体と、
前記第1の移動体に設けられた第2の保持部に保持されて、所定の周波電圧が印加されることにより駆動部に楕円振動を生ずる第2の振動子と、前記第2の振動子の駆動部が押圧され、かつ、前記第1の移動体が有するガイド部により第1の方向と異なる第2の方向に移動方向が規制され、前記第2の振動子の楕円振動により駆動されて前記第1の移動体に対して第2の方向に移動する第2の移動体部が固定されている第2の移動体と、
を備えており、前記第1の振動子と前記第2の振動子は、異なる共振周波数をもつことを特徴とする。 - 撮影光軸に直交する平面内で直交する第1の方向および第2の方向に撮像素子をブレを補償するように変位移動させる撮像装置において、
所定の周波電圧が印加されることにより駆動部に楕円振動を生ずる第1の振動子と、
前記第1の振動子を保持する第1の保持部を有して、撮像装置本体に固着された固定部材と、
前記第1の振動子の前記駆動部が押圧され、かつ、前記固定部材が有するガイド部により前記第1の方向に移動方向が規制され、前記第1の振動子の楕円振動により駆動されて前記固定部材に対して第1の方向に移動する第1の移動体部が固定された第1の移動体と、
第2の保持部を有する前記第1の移動体に保持されて、所定の周波電圧が印加されることにより駆動部に楕円振動を生ずる第2の振動子と、前記第2の振動子の前記駆動部が押圧され、かつ、前記第1の移動体が有するガイド部により第2の方向に移動方向が規制され、前記第2の振動子の楕円振動により駆動されて前記第1の移動体に対して第2の方向に移動する、前記撮像素子を前記撮影光軸上に保持した第2の移動体部が固定された第2の移動体と、
を備えており、前記第1の移動体部と第2の移動体部との剛性および密度の内、少なくとも1つが異なることを特徴とする撮像装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007170969A JP4981547B2 (ja) | 2007-06-28 | 2007-06-28 | 駆動装置および撮像装置 |
| EP08010636A EP2009493B1 (en) | 2007-06-28 | 2008-06-11 | Drive apparatus and image pickup apparatus |
| CN2008101096947A CN101334571B (zh) | 2007-06-28 | 2008-06-27 | 驱动装置和摄像装置 |
| US12/163,357 US8084920B2 (en) | 2007-06-28 | 2008-06-27 | Drive apparatus and image pickup apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007170969A JP4981547B2 (ja) | 2007-06-28 | 2007-06-28 | 駆動装置および撮像装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009011098A JP2009011098A (ja) | 2009-01-15 |
| JP4981547B2 true JP4981547B2 (ja) | 2012-07-25 |
Family
ID=39970970
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007170969A Expired - Fee Related JP4981547B2 (ja) | 2007-06-28 | 2007-06-28 | 駆動装置および撮像装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8084920B2 (ja) |
| EP (1) | EP2009493B1 (ja) |
| JP (1) | JP4981547B2 (ja) |
| CN (1) | CN101334571B (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7932661B2 (en) * | 2008-09-23 | 2011-04-26 | Nikko Company | Piezoelectric vibrator for ultrasonic motor |
| CN101742130B (zh) * | 2008-11-06 | 2011-11-30 | 鸿富锦精密工业(深圳)有限公司 | 影像感测器支架 |
| CN101753857B (zh) * | 2008-12-12 | 2011-11-09 | 鸿富锦精密工业(深圳)有限公司 | 影像感测器支架 |
| JP4790056B2 (ja) * | 2009-03-11 | 2011-10-12 | オリンパスイメージング株式会社 | 振動装置及びそれを用いた画像機器 |
| JP5780818B2 (ja) * | 2011-04-21 | 2015-09-16 | オリンパス株式会社 | 駆動装置およびそれを用いた画像装置 |
| CN102281394B (zh) * | 2011-08-25 | 2013-02-13 | 安徽大学 | 便携式采集读数摄像机 |
| JP2013258824A (ja) * | 2012-06-12 | 2013-12-26 | Seiko Epson Corp | 移動機構、ロボットハンド、電子部品搬送装置、電子部品検査装置、送液ポンプ、印刷装置、投影装置、搬送装置 |
| JP2013255959A (ja) | 2012-06-12 | 2013-12-26 | Seiko Epson Corp | 移動機構、電子部品搬送装置、電子部品検査装置 |
| WO2014145866A2 (en) * | 2013-03-15 | 2014-09-18 | St. Jude Medical, Cardiology Division, Inc. | Electrode contact feedback system |
| JP6170395B2 (ja) * | 2013-09-26 | 2017-07-26 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| JP6268999B2 (ja) * | 2013-12-06 | 2018-01-31 | セイコーエプソン株式会社 | 圧電モーター、ロボットハンド、ロボット、指アシスト装置、電子部品搬送装置、電子部品検査装置、送液ポンプ、印刷装置、電子時計、投影装置 |
| CN106575025B (zh) * | 2014-07-03 | 2020-01-31 | Lg伊诺特有限公司 | 透镜驱动装置 |
| WO2016075606A1 (en) * | 2014-11-12 | 2016-05-19 | Actuator Solutions GmbH | Camera module autofocus actuator and control method thereof |
| JP7111098B2 (ja) * | 2017-05-30 | 2022-08-02 | ソニーグループ株式会社 | ぶれ補正装置及び撮像装置 |
| JP6846533B2 (ja) * | 2017-09-27 | 2021-03-24 | 富士フイルム株式会社 | 像ぶれ補正装置及び撮像装置 |
| JP6985876B2 (ja) * | 2017-09-28 | 2021-12-22 | キヤノン株式会社 | 撮像装置 |
| JP2019146434A (ja) * | 2018-02-23 | 2019-08-29 | キヤノン株式会社 | 振動波モータ及びレンズ駆動装置 |
| CN109862243B (zh) * | 2019-01-31 | 2020-10-09 | 维沃移动通信有限公司 | 终端设备及终端设备的控制方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63288464A (ja) | 1987-05-21 | 1988-11-25 | Teac Co | 磁気ディスク装置 |
| US5191688A (en) * | 1989-07-27 | 1993-03-09 | Olympus Optical Co., Ltd. | Method for producing a superior longitudinal vibrator |
| IL113291A0 (en) * | 1995-04-06 | 1995-07-31 | Nanomotion Ltd | A multi-axis rotation device |
| AU9642698A (en) * | 1998-10-26 | 2000-05-15 | Nanomotion Ltd. | Multidirectional motors |
| IL137206A0 (en) * | 1999-10-31 | 2001-07-24 | Nanomotion Ltd | Piezoelectric motors and motor driving configurations |
| JP2004166479A (ja) * | 2002-06-14 | 2004-06-10 | Seiko Epson Corp | 回転型駆動装置およびこれを備えた装置 |
| JP2005331549A (ja) * | 2004-05-18 | 2005-12-02 | Konica Minolta Photo Imaging Inc | 手振れ補正装置および位置検出装置 |
| JP2006081348A (ja) * | 2004-09-10 | 2006-03-23 | Konica Minolta Photo Imaging Inc | 駆動機構、振れ補正ユニット及びこれらを用いたカメラ |
| JP4576214B2 (ja) * | 2004-11-26 | 2010-11-04 | オリンパスイメージング株式会社 | 超音波モータおよびレンズ鏡筒 |
| JP2007058089A (ja) * | 2005-08-26 | 2007-03-08 | Sony Corp | 像ぶれ補正装置、レンズ装置及び撮像装置 |
| JP2007065397A (ja) * | 2005-08-31 | 2007-03-15 | Olympus Imaging Corp | 鏡枠、電子撮像ユニットおよびカメラ |
| JP2007140204A (ja) * | 2005-11-18 | 2007-06-07 | Fujifilm Corp | ブレ補正装置 |
| US7701115B2 (en) * | 2007-05-01 | 2010-04-20 | Panasonic Corporation | Drive unit |
| JP5284605B2 (ja) * | 2007-06-28 | 2013-09-11 | オリンパスイメージング株式会社 | 駆動装置及びぶれ補正装置 |
| JP5165289B2 (ja) * | 2007-06-29 | 2013-03-21 | オリンパスイメージング株式会社 | 駆動装置 |
| US7944119B2 (en) * | 2007-07-12 | 2011-05-17 | Panasonic Corporation | Vibratory actuator and drive unit including the same |
| JP4465397B2 (ja) * | 2008-05-12 | 2010-05-19 | シャープ株式会社 | 超音波モータ |
-
2007
- 2007-06-28 JP JP2007170969A patent/JP4981547B2/ja not_active Expired - Fee Related
-
2008
- 2008-06-11 EP EP08010636A patent/EP2009493B1/en not_active Not-in-force
- 2008-06-27 CN CN2008101096947A patent/CN101334571B/zh not_active Expired - Fee Related
- 2008-06-27 US US12/163,357 patent/US8084920B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20090009657A1 (en) | 2009-01-08 |
| CN101334571A (zh) | 2008-12-31 |
| EP2009493B1 (en) | 2012-08-08 |
| US8084920B2 (en) | 2011-12-27 |
| EP2009493A3 (en) | 2010-12-08 |
| EP2009493A2 (en) | 2008-12-31 |
| CN101334571B (zh) | 2012-01-04 |
| JP2009011098A (ja) | 2009-01-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4981547B2 (ja) | 駆動装置および撮像装置 | |
| JP5230994B2 (ja) | 駆動装置および撮像装置 | |
| JP5185684B2 (ja) | 駆動装置および撮像装置 | |
| JP4981484B2 (ja) | 駆動装置 | |
| JP2009011097A (ja) | 駆動装置 | |
| US7893598B2 (en) | Driving apparatus and image pickup apparatus | |
| JP5003216B2 (ja) | 撮像装置および光学装置 | |
| JP5284605B2 (ja) | 駆動装置及びぶれ補正装置 | |
| JP2009008944A (ja) | ぶれ補正装置 | |
| JP2007129642A (ja) | 撮像装置 | |
| JP2009008929A (ja) | ブレ補正可能な撮像装置 | |
| JP2008216570A (ja) | 撮像装置 | |
| JP2010151970A (ja) | 駆動装置及びこの駆動装置を用いた撮像装置 | |
| JP2009008858A (ja) | ブレ補正装置及び撮像装置 | |
| JP5165289B2 (ja) | 駆動装置 | |
| JP2008220030A (ja) | 駆動装置および撮像装置 | |
| JP2009265416A (ja) | 駆動装置および撮像装置 | |
| JP2009165086A (ja) | 撮像装置 | |
| JP2010048977A (ja) | 撮像素子駆動装置 | |
| JP5132410B2 (ja) | 駆動装置および撮像装置 | |
| JP2008028615A (ja) | 撮像装置 | |
| JP5224077B2 (ja) | 撮像装置および光学装置 | |
| JP2007134802A (ja) | 撮像装置 | |
| JP2009294613A (ja) | 撮像素子駆動装置 | |
| JP4652953B2 (ja) | 撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100513 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120330 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120417 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120420 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150427 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4981547 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |