JP7093351B2 - 動力伝動要素、トルク測定装置、及びフリーホイールアセンブリ - Google Patents
動力伝動要素、トルク測定装置、及びフリーホイールアセンブリ Download PDFInfo
- Publication number
- JP7093351B2 JP7093351B2 JP2019528689A JP2019528689A JP7093351B2 JP 7093351 B2 JP7093351 B2 JP 7093351B2 JP 2019528689 A JP2019528689 A JP 2019528689A JP 2019528689 A JP2019528689 A JP 2019528689A JP 7093351 B2 JP7093351 B2 JP 7093351B2
- Authority
- JP
- Japan
- Prior art keywords
- gear
- ring
- shaft
- transmission
- pin
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540 biological transmission Effects 0.000 title claims description 550
- 238000005259 measurement Methods 0.000 claims description 70
- 238000005096 rolling process Methods 0.000 claims description 68
- 230000009467 reduction Effects 0.000 claims description 49
- 125000006850 spacer group Chemical group 0.000 claims description 29
- 238000011156 evaluation Methods 0.000 claims description 16
- 229910052751 metal Inorganic materials 0.000 claims description 14
- 239000002184 metal Substances 0.000 claims description 14
- 230000000670 limiting effect Effects 0.000 claims description 5
- 240000000220 Panda oleosa Species 0.000 claims 1
- 235000016496 Panda oleosa Nutrition 0.000 claims 1
- 239000013598 vector Substances 0.000 description 155
- 230000000737 periodic effect Effects 0.000 description 68
- 238000012937 correction Methods 0.000 description 26
- 230000033001 locomotion Effects 0.000 description 23
- 238000010276 construction Methods 0.000 description 19
- 230000006870 function Effects 0.000 description 18
- 238000000034 method Methods 0.000 description 18
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 17
- 230000000875 corresponding effect Effects 0.000 description 15
- 238000005520 cutting process Methods 0.000 description 14
- 229910052782 aluminium Inorganic materials 0.000 description 13
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 13
- 238000013461 design Methods 0.000 description 12
- 238000001816 cooling Methods 0.000 description 11
- 239000004033 plastic Substances 0.000 description 11
- 229920003023 plastic Polymers 0.000 description 11
- 230000002829 reductive effect Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 238000006243 chemical reaction Methods 0.000 description 8
- 230000009471 action Effects 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 5
- 239000000463 material Substances 0.000 description 5
- 238000003801 milling Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 239000000725 suspension Substances 0.000 description 4
- 229920002302 Nylon 6,6 Polymers 0.000 description 3
- 238000011088 calibration curve Methods 0.000 description 3
- 239000004519 grease Substances 0.000 description 3
- 238000001746 injection moulding Methods 0.000 description 3
- 230000003068 static effect Effects 0.000 description 3
- 238000001721 transfer moulding Methods 0.000 description 3
- 238000012935 Averaging Methods 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 2
- 238000010521 absorption reaction Methods 0.000 description 2
- 238000005266 casting Methods 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000013013 elastic material Substances 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 229910001092 metal group alloy Inorganic materials 0.000 description 2
- 230000036961 partial effect Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 229920003229 poly(methyl methacrylate) Polymers 0.000 description 2
- 239000004926 polymethyl methacrylate Substances 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 230000033764 rhythmic process Effects 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 239000004952 Polyamide Substances 0.000 description 1
- 208000032370 Secondary transmission Diseases 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- VNTLIPZTSJSULJ-UHFFFAOYSA-N chromium molybdenum Chemical compound [Cr].[Mo] VNTLIPZTSJSULJ-UHFFFAOYSA-N 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000005094 computer simulation Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000006837 decompression Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 229920002647 polyamide Polymers 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000005060 rubber Substances 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000003746 surface roughness Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 210000000332 tooth crown Anatomy 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000009827 uniform distribution Methods 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images



























































































































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0009—Force sensors associated with a bearing
- G01L5/0019—Force sensors associated with a bearing by using strain gages, piezoelectric, piezo-resistive or other ohmic-resistance based sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/22—Bearings with rolling contact, for exclusively rotary movement with bearing rollers essentially of the same size in one or more circular rows, e.g. needle bearings
- F16C19/34—Bearings with rolling contact, for exclusively rotary movement with bearing rollers essentially of the same size in one or more circular rows, e.g. needle bearings for both radial and axial load
- F16C19/38—Bearings with rolling contact, for exclusively rotary movement with bearing rollers essentially of the same size in one or more circular rows, e.g. needle bearings for both radial and axial load with two or more rows of rollers
- F16C19/381—Bearings with rolling contact, for exclusively rotary movement with bearing rollers essentially of the same size in one or more circular rows, e.g. needle bearings for both radial and axial load with two or more rows of rollers with at least one row for radial load in combination with at least one row for axial load
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0061—Force sensors associated with industrial machines or actuators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/40—Sensor arrangements; Mounting thereof
- B62J45/41—Sensor arrangements; Mounting thereof characterised by the type of sensor
- B62J45/411—Torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/40—Sensor arrangements; Mounting thereof
- B62J45/42—Sensor arrangements; Mounting thereof characterised by mounting
- B62J45/421—Sensor arrangements; Mounting thereof characterised by mounting at the pedal crank
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M11/00—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels
- B62M11/04—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio
- B62M11/14—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio with planetary gears
- B62M11/145—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio with planetary gears built in, or adjacent to, the bottom bracket
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M11/00—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels
- B62M11/04—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio
- B62M11/14—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio with planetary gears
- B62M11/18—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio with planetary gears with a plurality of planetary gear units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/45—Control or actuating devices therefor
- B62M6/50—Control or actuating devices therefor characterised by detectors or sensors, or arrangement thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/55—Rider propelled cycles with auxiliary electric motor power-driven at crank shafts parts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/02—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows
- F16C19/10—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for axial load mainly
- F16C19/12—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for axial load mainly for supporting the end face of a shaft or other member, e.g. footstep bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/52—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions
- F16C19/522—Bearings with rolling contact, for exclusively rotary movement with devices affected by abnormal or undesired conditions related to load on the bearing, e.g. bearings with load sensors or means to protect the bearing against overload
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C35/00—Rigid support of bearing units; Housings, e.g. caps, covers
- F16C35/04—Rigid support of bearing units; Housings, e.g. caps, covers in the case of ball or roller bearings
- F16C35/06—Mounting or dismounting of ball or roller bearings; Fixing them onto shaft or in housing
- F16C35/07—Fixing them on the shaft or housing with interposition of an element
- F16C35/077—Fixing them on the shaft or housing with interposition of an element between housing and outer race ring
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C41/00—Other accessories, e.g. devices integrated in the bearing not relating to the bearing function as such
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D41/00—Freewheels or freewheel clutches
- F16D41/06—Freewheels or freewheel clutches with intermediate wedging coupling members between an inner and an outer surface
- F16D41/064—Freewheels or freewheel clutches with intermediate wedging coupling members between an inner and an outer surface the intermediate members wedging by rolling and having a circular cross-section, e.g. balls
- F16D41/066—Freewheels or freewheel clutches with intermediate wedging coupling members between an inner and an outer surface the intermediate members wedging by rolling and having a circular cross-section, e.g. balls all members having the same size and only one of the two surfaces being cylindrical
- F16D41/067—Freewheels or freewheel clutches with intermediate wedging coupling members between an inner and an outer surface the intermediate members wedging by rolling and having a circular cross-section, e.g. balls all members having the same size and only one of the two surfaces being cylindrical and the members being distributed by a separate cage encircling the axis of rotation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D41/00—Freewheels or freewheel clutches
- F16D41/12—Freewheels or freewheel clutches with hinged pawl co-operating with teeth, cogs, or the like
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D41/00—Freewheels or freewheel clutches
- F16D41/24—Freewheels or freewheel clutches specially adapted for cycles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/28—Toothed gearings for conveying rotary motion with gears having orbital motion
- F16H1/32—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0009—Force sensors associated with a bearing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0028—Force sensors associated with force applying means
- G01L5/0042—Force sensors associated with force applying means applying a torque
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0061—Force sensors associated with industrial machines or actuators
- G01L5/0066—Calibration arrangements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M13/00—Testing of machine parts
- G01M13/02—Gearings; Transmission mechanisms
- G01M13/027—Test-benches with force-applying means, e.g. loading of drive shafts along several directions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M13/00—Testing of machine parts
- G01M13/04—Bearings
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M15/00—Testing of engines
- G01M15/04—Testing internal-combustion engines
- G01M15/06—Testing internal-combustion engines by monitoring positions of pistons or cranks
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/02—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows
- F16C19/04—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for radial load mainly
- F16C19/06—Bearings with rolling contact, for exclusively rotary movement with bearing balls essentially of the same size in one or more circular rows for radial load mainly with a single row or balls
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/54—Systems consisting of a plurality of bearings with rolling friction
- F16C19/546—Systems with spaced apart rolling bearings including at least one angular contact bearing
- F16C19/547—Systems with spaced apart rolling bearings including at least one angular contact bearing with two angular contact rolling bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2326/00—Articles relating to transporting
- F16C2326/20—Land vehicles
- F16C2326/28—Bicycle propulsion, e.g. crankshaft and its support
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2380/00—Electrical apparatus
- F16C2380/26—Dynamo-electric machines or combinations therewith, e.g. electro-motors and generators
- F16C2380/27—Motor coupled with a gear, e.g. worm gears
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H49/00—Other gearings
- F16H49/001—Wave gearings, e.g. harmonic drive transmissions
Description
rl>0、r2>0及びrl>r2が適用される。特に、歯部は、歯先の領域においてだけでなく、全周に沿ってこの形状に相当することができる。
rl>0、r2>0及びrl>r2が適用され、rl、r2及びnは、上記外側歯車の歯部に関してと同一の値を有する。特に、この歯部の形状は、歯先の領域においてだけでなく、全周に沿って、上記歯部に適用されることができる。
変速機ハウジング;上記変速機ハウジングに固定された内歯を有する外側歯車;及び上記外側歯車と同心に配置された入力シャフトを備え、上記入力シャフトは、第1の玉軸受が配置された駆動側偏心ディスクと、第2の玉軸受が配置された出力側偏心ディスクとを備える。
x(t)=r1*cos(t)+r2*cos((n+1)*t)+r3*cos((n+3)*t)、及び
y(t)=r1*sin(t)-r2*sin((n+1)*t)+r3*sin((n+3)*t)
tは0~2π/Z_outer又は360°/Z_outerであり、例えば等距離線は、歯車軌道までピン半径分の距離を有する。























-第1の歯部を有する第1の歯車と、
-第2の歯部を有する第2の歯車と、
-丸みを帯びた係合領域を有するピンリングと、
-前記ピンリングの前記係合領域を、前記第1の歯車の前記第1の歯部及び前記第2の歯車の前記第2の歯部に引き込むための回転トランスミッタと
を備え、前記第1の歯車、前記回転トランスミッタ、及び前記第2の歯車は互いに同心に配置され、前記回転トランスミッタは、前記ピンリングの径方向内側に配置され、前記ピンリングは、前記第1の歯車と前記第2の歯車の間に配置され、前記回転トランスミッタは、変速機中心軸に対して偏心して配置されたトランスミッタディスクを備え、前記第1の歯車の前記第1の歯部及び前記第2の歯車の前記第2の歯部は、周転円構法に従って形成され、
前記第1の歯部及び前記第2の歯部のそれぞれの歯面での位置は、周期角度の関数として、前記変速機中心軸からの径方向距離として決定され、
前記径方向距離は、歯車軌道に対する等距離線によって決定され、前記歯車軌道での位置はそれぞれ、周期ベクトル及び周転円ベクトルのベクトル和によって決定され、前記周期ベクトルの後端は前記変速機中心軸にあり、前記周転円ベクトルの後端は前記周期ベクトルの先端にあり、前記周転円ベクトルの周転円角度は前記周期角度よりn倍大きく、前記周期角度の長さは前記周転円角度の長さより長く、nは、前記ハーモニックピンリング変速機の丸みを帯びた係合領域の数であって少なくとも3である、ハーモニックピンリング変速機。
前記中心軸からの径方向距離は、歯車軌道に対する内側等距離線によって決定され、
前記歯車軌道での位置は、周期ベクトル、第1の周転円ベクトル及び第2の周転円ベクトルのベクトル和によって決定され、前記周期ベクトルの後端は前記中心軸にあり、前記第1の周転円ベクトルの後端は前記周期ベクトルの先端にあり、前記第2の周転円ベクトルの後端は前記第1の周転円ベクトルの先端にあり、
前記第1の周転円ベクトルの周転円角度は前記周期角度よりn-1倍大きく、前記第2の周転円ベクトルの周転円角度は前記周期角度よりn-3倍大きく、ここでnは、前記ハーモニックピンリング変速機のピンの数であって少なくとも4であり、前記第1の周転円角度は前記周期角度と同一方向において測定され、前記第2の周転円角度は前記周期角度と反対の方向において測定され、前記周期ベクトルの長さは、前記第1の周転円ベクトルと前記第2の周転円ベクトルの長さの和より長く、前記第1の周転円ベクトルの長さは、前記第2の周転円ベクトルの長さより長い、内側歯車。
前記径方向距離は、歯車軌道に対する外側等距離線によって定められ、
前記歯車軌道での位置はそれぞれ、周期ベクトル、第1の周転円ベクトル及び第2の周転円ベクトルのベクトル和によって決定され、前記周期ベクトルの後端は前記中心軸にあり、前記第1の周転円ベクトルの後端は前記周期ベクトルの先端にあり、前記第2の周転円ベクトルの後端は前記第1の周転円ベクトルの先端にあり、
前記第1の周転円ベクトルの周転円角度は前記周期角度よりn+1倍大きく、前記第2の周転円ベクトルの周転円角度は前記周期角度よりn+3倍大きく、ここでnは、前記ハーモニックピンリング変速機のピンの数であって少なくとも4であり、前記第1の周転円角度は前記周期角度と反対の方向において測定され、前記第2の周転円角度は前記周期角度と同一方向において測定され、前記周期ベクトルの長さは、前記第1の周転円ベクトルと前記第2の周転円ベクトルの長さの和より長く、前記第1の周転円ベクトルの長さは、前記第2の周転円ベクトルの長さより長い、外側歯車。
-第12項に記載の内側歯車と、
-第13項に記載の外側歯車と、
-丸みを帯びた係合領域を有するピンリングと、
-前記ピンリングの前記係合領域を、前記外側歯車の内歯及び前記内側歯車の外歯に引き込むための回転トランスミッタと
を備え、前記内側歯車、前記回転トランスミッタ、及び前記外側歯車は互いに同心に配置され、前記回転トランスミッタは、前記ピンリングの径方向内側に配置され、前記ピンリングは、前記内側歯車と前記外側歯車の間に配置される、ハーモニックピンリング変速機。
-第13項に記載の第1の外側歯車と、
-第13項に記載の第2の外側歯車と、
-丸みを帯びた係合領域を有するピンリングと、
-前記ピンリングの前記係合領域を、前記第1の外側歯車の内歯及び前記第2の外側歯車の内歯に引き込むための回転トランスミッタと
を備え、前記回転トランスミッタ、前記第1の外側歯車、及び前記第2の外側歯車は互いに同心に配置され、前記回転トランスミッタは、前記ピンリングの径方向内側に配置され、前記ピンリングは、前記第1の外側歯車と前記第2の外側歯車の間に軸方向に配置される、ハーモニックピンリング変速機。
-第1の外側歯車と、
-第1の軸直角平面において前記第1の外側歯車に対して同心に配置された内側歯車と、
-第2の軸直角平面に配置された第2の外側歯車と、
-前記第1の外側歯車と前記内側歯車の間に延在する牽引手段と、
-前記牽引手段を前記内側歯車の外周から持ち上げて、前記第1の外側歯車の内周に押し付ける回転トランスミッタと
を備え、前記回転トランスミッタは、中空駆動シャフト及びカムディスクを備え、該カムディスクは、前記第1の軸直角平面と前記第2の軸直角平面の間に位置する第3の軸直角平面に配置され、
前記カムディスクは、前記中空駆動シャフトと単一部品として形成される、ハーモニックピンリング変速機。
-第1の外側歯車と、
-第1の軸直角平面において前記第1の外側歯車に対して同心に配置された内側歯車と、
-第2の軸直角平面に配置された第2の外側歯車と、
-前記第1の外側歯車と前記内側歯車の間に延在する牽引手段と、
-前記牽引手段を前記内側歯車の外周から持ち上げて、前記第1の外側歯車の内周に押し付ける回転トランスミッタと
を備え、前記回転トランスミッタは、中空駆動シャフト及びカムディスクを備え、該カムディスクは、前記第1の軸直角平面と前記第2の軸直角平面の間に位置する第3の軸直角平面に配置され、前記第1の外側歯車は第1の外側リングによって形成され、前記第2の外側歯車は第2の外側リングによって形成され、前記第1の外側リング及び第2の外側リングは支持リング内に挿入される、ハーモニックピンリング変速機。
-第1の外側歯車と、
-第1の軸直角平面において前記第1の外側歯車に対して同心に配置された内側歯車と、
-第2の軸直角平面に配置された第2の外側歯車と、
-前記第1の外側歯車と前記内側歯車の間に延在する牽引手段と、
-前記牽引手段を前記内側歯車の外周から持ち上げて、前記第1の外側歯車の内周に押し付ける回転トランスミッタと
を備え、前記回転トランスミッタは、中空駆動シャフト及びカムディスクを備え、該カムディスクは、前記第1の軸直角平面と前記第2の軸直角平面の間に位置する第3の軸直角平面に配置され、
前記変速機は、モータフリーホイールを介して前記内側歯車に設置される中空出力シャフトと、ペダルシャフトフリーホイールを介して前記中空出力シャフトに設置されるペダルシャフトとを備え、前記ペダルシャフトは、外周に前記モータフリーホイールのための受承領域を備え、内周に前記ペダルシャフトフリーホイールのための受承領域を備える、ハーモニックピンリング変速機。
-中空駆動シャフトと、
-中空出力シャフトと、
-ペダルシャフトと
を備え、前記ペダルシャフト、前記中空出力シャフト、及び前記中空駆動シャフトは互いに対して同心に配置され、前記中空出力シャフトは、前記中空駆動シャフトの径方向内側に配置され、前記ペダルシャフトは、前記中空出力シャフトの径方向内側に配置され、
前記中空出力シャフトは、内周に階段状歯止め係合領域を備え、外周に階段状クランプローラ転動領域を備え、前記ペダルシャフトは、歯止めのための星形受承領域を備え、該星形受承領域は、歯止め台座と、該歯止め台座に隣接して配置されたバネ台座とを備える、フリーホイールアセンブリ。
ウェブと、該ウェブの間に配置されたクランプローラとを有するフリーホイールケージと
を更に備え、前記フリーホイールケージ及び前記クランプローラは、前記中空出力シャフトの前記クランプローラ転動領域と前記中空駆動シャフトの内周の間に径方向に配置される、第18項~第24項のいずれかに記載のフリーホイールアセンブリ。
-第1の外側歯車と、
-第1の軸直角平面において前記第1の外側歯車に対して同心に配置された内側歯車と、
-第2の軸直角平面に配置された第2の外側歯車と、
-前記第1の外側歯車と前記内側歯車の間に延在する牽引手段と、
-前記牽引手段を前記内側歯車の外周から持ち上げて、前記第1の外側歯車の内周に押し付ける回転トランスミッタと
を備え、前記回転トランスミッタは、中空駆動シャフト及びカムディスクを備え、該カムディスクは、前記第1の軸直角平面と前記第2の軸直角平面の間に位置する第3の軸直角平面に配置され、
前記変速機は、モータフリーホイールを介して前記内側歯車に設置される中空出力シャフトと、ペダルシャフトフリーホイールを介して前記中空出力シャフトに設置されるペダルシャフトとを備え、前記ペダルシャフトは、外周に前記モータフリーホイールのための受承領域を備え、内周に前記ペダルシャフトフリーホイールのための受承領域を備える、ハーモニックピンリング変速機。
-第1の外側歯車と、
-第1の軸直角平面において前記第1の外側歯車に対して同心に配置された内側歯車と、
-第2の軸直角平面に配置された第2の外側歯車と、
-前記第1の外側歯車と前記内側歯車の間に延びるピンを有するピンリングと、
-前記ピンリングの前記ピンを前記内側歯車の外周から持ち上げて、前記第1の外側歯車の内周に押し付ける回転トランスミッタと
を備え、前記回転トランスミッタは、中空駆動シャフト及びカムディスクを備え、該カムディスクは、前記第1の軸直角平面と前記第2の軸直角平面の間に位置する第3の軸直角平面に配置され、
前記ピンリングは単一部品として形成され、かつ金属で作られ、前記ピンは、前記ピンリングの中央領域の2つの反対側の側部から突出する突出部によって形成され、前記中央領域は、軸受に当接するための内側軸受面を備える、ハーモニックピンリング変速機。
-第1の外側歯車と、
-第1の軸直角平面において前記第1の外側歯車に対して同心に配置された内側歯車と、
-第2の軸直角平面に配置された第2の外側歯車と、
-前記第1の外側歯車と前記内側歯車の間に延在する牽引手段と、
-前記牽引手段を前記内側歯車の外周から持ち上げて、前記第1の外側歯車の内周に押し付ける回転トランスミッタと
を備え、前記回転トランスミッタは、中空駆動シャフト及びカムディスクを備え、該カムディスクは、前記第1の軸直角平面と前記第2の軸直角平面の間に位置する第3の軸直角平面に配置され、
ペダルシャフトが前記出力シャフトの径方向内側に配置され、前記ペダルシャフトは、駆動側のペダルシャフト玉軸受及びロードセルを介してモータハウジング内に取り付けられる、ハーモニックピンリング変速機。
-第1の外側歯車と、
-第1の軸直角平面において前記第1の外側歯車に対して同心に配置された内側歯車と、
-第2の軸直角平面に配置された第2の外側歯車と、
-前記第1の外側歯車と前記内側歯車の間に延在する牽引手段と、
-前記牽引手段を前記内側歯車の外周から持ち上げて、前記第1の外側歯車の内周に押し付ける回転トランスミッタと
を備え、前記回転トランスミッタは、中空駆動シャフト及びカムディスクを備え、該カムディスクは、前記第1の軸直角平面と前記第2の軸直角平面の間に位置する第3の軸直角平面に配置され、ペダルシャフトは前記出力シャフトの径方向内側に配置され、更に遊星歯車装置及びペダルシャフトフリーホイールが、前記ペダルシャフトと前記出力シャフトの間の力の流れの中に配置される、ハーモニックピンリング変速機。
-内歯を有する外側歯車と、ここで該外側歯車は、変速機ハウジングへの取り付けのための固定領域を備え、
-外歯を有するテンションシャフトと、ここで該テンションシャフトは、軸直角平面において前記外側歯車に対して同心に配置され、
-前記テンションシャフトを前記外側歯車の前記内歯に押し付ける回転トランスミッタと
を備え、前記回転トランスミッタは、中空駆動シャフト及びカムディスクを備え、玉軸受が前記カムディスクの周りに配置され、
前記テンションシャフトの前記外歯の歯先の断面は、本質的に扇形に相当し、
前記外側歯車の軸に対して、前記外側歯車の前記内歯は本質的に、式x(t)=r1*cost(t)+r2*cos((n+1)*t)+r3*cos((n+3)*t)及びy(t)=r1*sin(t)-r2*sin((n+1)*t)+r3*sin((n+3)*t)で規定される歯車の軌道に対する外側等距離線によって定められ、ここでn+1は、前記外側歯車の前記内歯の歯の数であり、半径rl、r2及びr3はゼロより大きく、半径の大きさに関して、r2>r3及びr1>r2+r3が適用される、テンションシャフト変速機。
-内歯を有する外側歯車と、ここで該外側歯車は、変速機ハウジングへの取り付けのための固定領域を備え、
-外歯を有するテンションシャフトと、ここで該テンションシャフトは、軸直角平面において前記外側歯車に対して同心に配置され、前記テンションシャフトの前記外歯の歯先の断面は、本質的に扇形に相当し、
-前記テンションシャフトを前記外側歯車の前記内歯に押し付ける回転トランスミッタと
を備え、前記回転トランスミッタは、中空駆動シャフト及びカムディスクを備え、
前記外側歯車の前記内歯の歯面は、周期角度の関数として、前記内側歯車の中心軸からの径方向距離によって決定され、前記中心軸からの径方向距離は、歯車軌道に対する内側等距離線によって決定され、前記歯車軌道での位置はそれぞれ、周期ベクトル、第1の周転円ベクトル、及び第2の周転円ベクトルのベクトル和によって決定され、前記周期ベクトルの後端は前記中心軸にあり、前記第1の周転円ベクトルの後端は前記周期ベクトルの先端にあり、前記第2の周転円ベクトルの後端は前記第1の周転円ベクトルの先端にあり、
前記第1の周転円ベクトルの周転円角度は前記周期角度のn+1倍大きく、前記第2の周転円ベクトルの周転円角度は前記周期角度のn+3倍大きく、nは、前記ハーモニックピンリング変速機のピンの数であって少なくとも4であり、前記周期ベクトルの長さは、前記第1の周転円ベクトルと前記第2の周転円ベクトルの長さの和より長く、前記第1の周転円ベクトルの長さは、前記第2の周転円ベクトルの長さより長い、テンションシャフト変速機。
-第1の内歯を有する固定された外側歯車と、ここで該外側歯車は、変速機ハウジングへの取り付けのための固定領域を備え、
-第2の内歯を有する回転可能な外側歯車と、ここで該外側歯車は、出力シャフトへの取り付けのための固定領域を備え、
-2部分一体型ピンリングと、ここで該2部分一体型ピンリングは、第1の外歯及び第2の外歯を備え、前記2部分一体型ピンリングの前記第1の外歯は、前記固定された外側歯車の前記内歯に係合し、前記2部分一体型ピンリングの前記第2の外歯は、前記回転可能な外側歯車の前記内歯に係合し、
-前記固定された外側歯車の前記内歯及び前記回転可能な外側歯車の前記内歯に前記2部分一体型ピンリングを押し付けるように構成された回転トランスミッタと
を備える、2段減速歯車。
-軸受のリングを受けるための受承スリーブと、
-前記ロードセルを変速機ハウジング内に取り付けるための固定リングと、
-前記軸受のリングを軸方向で支持するために前記固定リングに備えられた軸方向支持部分と、
-前記受承スリーブの径方向の力を受けるための測定領域と、ここで該測定領域は、前記受承スリーブを前記固定リングに接続し、前記測定領域のうちの少なくとも2つに歪みセンサが取り付けられ、
を備える、ロードセル。
-中空駆動シャフトと、
-中空出力シャフトと、
-ペダルシャフトと
を備え、前記ペダルシャフト、前記中空出力シャフト及び前記中空駆動シャフトは互いに同心に配置され、前記中空出力シャフトは、前記中空駆動シャフトの径方向内側に配置され、前記ペダルシャフトは、前記中空出力シャフトの径方向内側に配置され、前記ペダルシャフトフリーホイールは、前記ペダルシャフトと前記中空出力シャフトの間に配置され、前記伝動フリーホイールは、前記中空出力シャフトの、前記ペダルシャフトフリーホイールとの反対側に配置され、前記中空出力シャフトは、各フリーホイールの領域での内側及び外側に適合された部分を備える、フリーホイールアセンブリ。
-変速機ハウジングと、
-前記変速機ハウジングに固定された内歯を有する外側歯車と、
-前記外側歯車と同心に配置された入力シャフトと、ここで該入力シャフトは、第1の玉軸受が配置された駆動側偏心ディスクと、第2の玉軸受が配置された出力側偏心ディスクとを備え、
-前記第1の玉軸受に取り付けられた外歯を有する駆動側内側歯車と、前記第2の玉軸受に取り付けられた外歯を有する出力側内側歯車と
を備え、前記駆動側内側歯車及び前記出力側内側歯車は、前記外側歯車の内側に配置され、前記駆動側内側歯車及び前記出力側外側歯車の前記外歯はそれぞれ、前記外側歯車の前記内歯と係合する、サイクロイド歯車。
5’ 外歯
6 内歯
6’ 内歯
7 内側歯車
8 外側歯車
8’ 外側歯車
9 段
10 モータ歯車ユニット
11 段
12 モータ
13 減速歯車
20 固定子
21 コイル
22 モータハウジング
23 プリント回路基板
24 冷却カバー
25 端子
26 外側回転子シャフト
27 内側回転子シャフト
28 カムディスク
28’ 偏心ディスク
29 駆動側回転子玉軸受
30 出力側回転子玉軸受
31 内側歯車玉軸受
32 ハウジングカバー
33 可撓性玉軸受
33’ 玉軸受
34 固定ねじ
35 ペダルシャフト
36 支持リング
37 駆動側スペーサディスク
38 出力側スペーサディスク
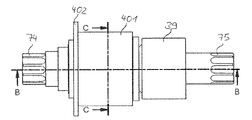
39 出力シャフト
40 伝動フリーホイール
41 出力玉軸受
41’ 駆動側出力玉軸受
42 Oリング
43 チェーンリングアダプタ
44 出力ナット、変速機カバー
45 駆動側ペダルシャフト玉軸受
46 出力側ペダルシャフト玉軸受
47 ロードセル
48 環状プリント回路基板/PCB力センサ
49 ペダルシャフトフリーホイール
50 内側シャフトシールリング
51 外側シャフトシールリング
52 駆動側シャフトシールリング
53 ジャーナル
54 径方向スロット
55 ねじ穴
56 伝動領域
57 段
58 丸みを帯びた凹部
59 平坦部
60 ねじのねじ山
61 波形バネ
62 スペーサリング
63 リボンケーブル
64 円筒状ローラ
65 クランプケージ
66 コイルバネ
67 軌道
68 センサリング
69 スペーサ
70 波形バネ
71 段
72 コイルバネ
73 歯止め
74 固定領域
75 固定領域
76 Oリング
80 ペダルシャフトアセンブリ
81 フリーホイールアセンブリ
82 センサアセンブリ
90 測定用突起
91 支持突起
92 歪みゲージ
93 外側部分
94 内側部分
95 径方向スロット
96 スリーブ
97 外側リング
98 固定孔
99 凹部
101 ピン
102 ピンリング
103 ピン保持リング
104 スロット
105 周方向スロット
106 駆動側段
107 出力側段
109 ボトムブラケット軸受
110 トルク測定装置
111 ペダルシャフト
112 第1の転がり軸受
113 第2の転がり軸受
114 スリーブ
115 端面
116 部分
117 歪みゲージ
118 歪みゲージ
119 歪みゲージ
120 外面
121 スリップリング
122 トランスミッタ
124 歪みゲージ
130 トルク測定装置
131 歪みゲージ
132 歪みゲージ
133 歪みゲージ
134 歪みゲージ
135 ハウジング
136 プリント回路基板
137 トランスミッタリング
138 センサ
139 突出部
140 ねじ
141 段
142 Oリング
220 受承領域
222 段、駆動側
223 段、駆動側
224 段、出力側
225 段、出力側
226 段、出力側
227 星形構成
228 転動領域
229 転動領域
230 段
231 段
232 段
233 雌ねじ
234 中空シャフト部分
235 ディスク状領域
236 孔
237 面取り部分
243 転動領域
244 端部
245 歯止め受承領域
246 ヒンジ部分
247 ヒンジ部分
248 プレート状部分
249 縁部
250 ウェブ
251 受承領域
252 受承領域
255 第1の領域
257 センサリング
258 回転速度センサ
343 Oリング
344 Oリング
345 センサリング
346 内側ハウジング
347 ねじ
348 支持シリンダ
349 ウェブ
352 中空シャフト
353 ホールセンサ
354 溝
355 ジャーナル
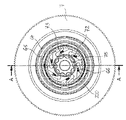
400、400’ 遊星歯車装置アセンブリ
401、401’ リングギヤ
402 固定用フランジ
403 太陽歯車
405 遊星歯車
406 遊星歯車軸
407 遊星キャリア
408 転がり軸受
409 中空シャフト
410 中空シャフト
423 玉軸受
424 玉軸受
425 玉軸受
426 駆動シャフト
427 回転子シャフト
428 偏心ディスク
429 偏心ディスク
430 中心に配置された円形ディスク
433 内側歯車
434 内側歯車
435 外歯
436 外歯
437 内歯
440 出力プーリ
442 キャリアピン
443 キャリアローラ
441 リング
444 円形開口部
445 スペーサ
446 突起部
447 静止ピン
448 固定用開口
450 外側のねじ
451 圧力ディスク
452 圧力リング
453 テンションシャフト
454 固定領域
455 駆動シリンダ
456 固定用フランジ
457 固定領域
458 出力シャフト
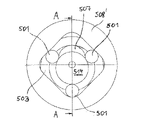
501 ピン
502 可撓性薄肉玉軸受
503 ピン保持リング
504 フランジ
505、505’ 内側歯車歯部
506、506’ 外側歯車歯部
507 内側リング又は内側歯車
508 外側リング又は外側歯車
509 円筒状ハウジング部分
510 HPRD変速機
513 回転子
514 偏心ディスク
515 変速機中心軸
516 半円状の凹部
518 歯車軌道
519 等距離線
520 ピン断面
521 歯車軌道の位置
525 当初輪郭
526 準備を伴った輪郭
527 摩耗した輪郭
528 内側歯車の歯車軌道
528’ 外側歯車の歯車軌道
529 内側歯車の歯車軌道の等距離線
529’ 外側歯車の歯車軌道の等距離線
530 一体的に形成されたピンリング
531 ピンリングの歯
532 ピンリングの歯の基部
533 内側包絡線
534 外側包絡線
536 所定の歯形
537 測定対象の歯形
Claims (21)
- クランクシャフトに作用する径方向の力を測定するためのロードセル(47)であって、該ロードセル(47)は、
-軸受(45)のリングを受けるための受承スリーブ(96)と、
-前記ロードセル(47)を変速機ハウジング(22)内に取り付けるための固定リング(97)と、
-前記軸受(45)のリングを軸方向で支持するために前記固定リング(97)に備えられた軸方向支持部分(91)と、
-前記受承スリーブ(96)の径方向の力を受けるための複数の測定領域と、ここで該測定領域は、前記受承スリーブ(96)を前記固定リング(97)に接続し、前記測定領域のうちの少なくとも2つに歪みセンサ(92)が取り付けられ、
を備え、前記軸方向支持部分(91)は、径方向スロット(95)によって前記測定領域から離されており、前記軸方向支持部分(91)は、周方向スロット(104)によって前記受承スリーブ(96)から離されており、第1の径方向スロット(95)、周方向スロット(105)、及び第2の径方向スロット(95)は一緒に制限スロットを形成し、該制限スロットは、軸方向支持部分(91)を前記受承スリーブ(96)及び隣接する測定領域から隔て、前記軸方向支持部分(91)は、前記受承スリーブ(96)の内面で径方向内向きに突出する、ロードセル(47)。 - 前記測定領域は、角ブラケットとして形成された測定用突起(90)を備える、請求項1に記載のロードセル(47)。
- 前記測定用突起(90)は、径方向領域と、該径方向領域に隣接した軸方向領域とを備え、前記径方向領域は前記固定リング(97)に接続され、前記軸方向領域は前記受承スリーブ(96)に接続され、前記径方向領域は、前記軸方向領域に対しておよそ90°の角度で配置される、請求項2に記載のロードセル(47)。
- 前記軸方向領域は、前記受承スリーブ(96)の円筒形の内面と面一である、請求項3に記載のロードセル(47)。
- 前記歪みセンサ(92)のうちの少なくとも1つは、歪みゲージ(92)として構成される、請求項1から4のいずれかに記載のロードセル(47)。
- 1つの歪みセンサ(92)が、それぞれの前記測定領域に取り付けられる、請求項1から5のいずれかに記載のロードセル(47)。
- 前記測定領域のうちの少なくとも2つは、前記歪みセンサ(92)を取り付けるための低くなった部分を備える、請求項1から6のいずれかに記載のロードセル(47)。
- 前記ロードセル(47)は、90°の間隔で配置された4つの前記測定領域を備える、請求項1から7のいずれかに記載のロードセル(47)。
- 前記固定リング(97)は、固定孔(98)が備えられた固定領域を有する、請求項1から8のいずれかに記載のロードセル(47)。
- 前記固定リング(97)は凹部を備え、前記測定領域は前記凹部に配置される、請求項1から9のいずれかに記載のロードセル(47)。
- 前記測定用突起(90)と、前記測定用突起(90)の大きさを定める前記スロット(95)の角度に関する大きさが、前記軸方向支持部分(91)の角度に関する大きさにおおよそ対応する、請求項1から10のいずれかに記載のロードセル(47)。
- 周方向における前記測定領域の角度に関する大きさは、30°以下である、請求項1から11のいずれかに記載のロードセル(47)。
- 前記ロードセル(47)は金属で一体的に作られる、請求項1から12のいずれかに記載のロードセル(47)。
- クランクシャフトに作用する力を測定するための測定装置であって、
-前記クランクシャフトに配置された軸受(45)を備えた前記クランクシャフトと、
-請求項1から13のいずれかに記載のロードセル(47)と、ここで前記ロードセル(47)の受承スリーブ(96)は、前記軸受(45)の外側リングに配置され、前記ロードセル(47)の前記軸方向支持部分(91)は、前記軸受(45)の前記外側リングに軸方向で支持され、
-前記ロードセル(47)の前記歪みセンサ(92)に接続された評価用電子機器(48)と
を備えた測定装置。 - 変速機ハウジング(22)及びクランクシャフトを備え、前記クランクシャフトは、第1の軸受(45)及び第2の軸受(46)を介して前記変速機ハウジング(22)内に設置され、前記第1の軸受(45)は、前記測定装置の前記ロードセル(47)を介して前記変速機ハウジング(22)内に受けられ、前記ロードセル(47)は、前記固定リング(97)を介して前記変速機ハウジング(22)内に受けられ、前記受承スリーブ(96)は、前記第1の軸受(45)の外側リングを受承し、前記軸方向支持部分(91)は前記第1の軸受(45)の前記外側リングで支持される、請求項14に記載の測定装置を備えた変速装置。
- 前記測定装置の前記第1の軸受(45)及び前記測定装置の前記第2の軸受(46)は、単列アンギュラ玉軸受として構成される、請求項15に記載の変速装置。
- 前記クランクシャフトは、第1の段(223)及び第2の段(226)を備え、前記測定装置の前記第1の軸受(45)の内側リングは、前記クランクシャフトの前記第1の段(223)に配置され、前記第2の軸受(46)の内側リングは、前記クランクシャフトの前記第2の段(226)に配置され、それにより斜めに設置された軸受のX字形配置が形成される、請求項15又は16に記載の変速装置。
- 前記第2の軸受(46)は、前記クランクシャフトの前記第2の段(226)に又は前記ハウジングに、波形バネ(70)によって支持される、請求項17に記載の変速装置。
- 前記第2の軸受(46)は、更に前記クランクシャフトの前記第2の段(226)又は前記ハウジングに、スペーサディスク(69)によって支持される、請求項18に記載の変速装置。
- モータ(12)と、該モータ(12)に接続された減速歯車(13)と、該減速歯車(13)に接続された中空出力シャフト(39)とを更に含み、前記クランクシャフトはペダルシャフト(35)として構成され、前記第1の軸受(45)及び前記第2の軸受(46)はそれぞれ転がり軸受として構成され、前記ペダルシャフト(35)は前記中空出力シャフト(39)を通り、前記ペダルシャフト(35)を前記中空出力シャフト(39)から切り離すために、フリーホイール(49)が前記ペダルシャフト(35)と前記中空出力シャフト(39)の間に備えられる、請求項15から19のいずれかに記載の変速装置。
- 請求項20に記載の変速装置を備えた電動車両であって、前記モータ(12)は電気モータ(12)として構成され、前記電動車両のバッテリは前記電気モータ(12)に接続される、電動車両。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022098131A JP7417669B2 (ja) | 2016-11-28 | 2022-06-17 | 動力伝動要素、トルク測定装置、及びフリーホイールアセンブリ |
| JP2024000890A JP2024029194A (ja) | 2016-11-28 | 2024-01-05 | 動力伝動要素、トルク測定装置、及びフリーホイールアセンブリ |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102016122845.1 | 2016-11-28 | ||
| DE102016122845.1A DE102016122845A1 (de) | 2016-11-28 | 2016-11-28 | Harmonisches Pinring-Getriebe, Drehmomentmessvorrichtung und Freilaufanordnung |
| PCT/IB2017/057452 WO2018096521A2 (de) | 2016-11-28 | 2017-11-28 | Kraftübertragungselemente, drehmomentmessvorrichtung und freilaufanordnung |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022098131A Division JP7417669B2 (ja) | 2016-11-28 | 2022-06-17 | 動力伝動要素、トルク測定装置、及びフリーホイールアセンブリ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019537019A JP2019537019A (ja) | 2019-12-19 |
| JP2019537019A5 JP2019537019A5 (ja) | 2021-02-25 |
| JP7093351B2 true JP7093351B2 (ja) | 2022-06-29 |
Family
ID=60857134
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019528689A Active JP7093351B2 (ja) | 2016-11-28 | 2017-11-28 | 動力伝動要素、トルク測定装置、及びフリーホイールアセンブリ |
| JP2022098131A Active JP7417669B2 (ja) | 2016-11-28 | 2022-06-17 | 動力伝動要素、トルク測定装置、及びフリーホイールアセンブリ |
| JP2024000890A Pending JP2024029194A (ja) | 2016-11-28 | 2024-01-05 | 動力伝動要素、トルク測定装置、及びフリーホイールアセンブリ |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022098131A Active JP7417669B2 (ja) | 2016-11-28 | 2022-06-17 | 動力伝動要素、トルク測定装置、及びフリーホイールアセンブリ |
| JP2024000890A Pending JP2024029194A (ja) | 2016-11-28 | 2024-01-05 | 動力伝動要素、トルク測定装置、及びフリーホイールアセンブリ |
Country Status (6)
| Country | Link |
|---|---|
| US (4) | US11286979B2 (ja) |
| EP (3) | EP3978886B1 (ja) |
| JP (3) | JP7093351B2 (ja) |
| CN (2) | CN110088585B (ja) |
| DE (1) | DE102016122845A1 (ja) |
| WO (1) | WO2018096521A2 (ja) |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11280394B2 (en) | 2009-03-30 | 2022-03-22 | Tq-Systems Gmbh | Gear, motor-gear unit, vehicle, generator with a gear, and force transmitting element |
| US10371240B2 (en) | 2013-03-20 | 2019-08-06 | Tq-Systems Gmbh | Harmonic pin ring gearing |
| DE102016122845A1 (de) | 2016-11-28 | 2018-05-30 | Tq-Systems Gmbh | Harmonisches Pinring-Getriebe, Drehmomentmessvorrichtung und Freilaufanordnung |
| GB201716311D0 (en) * | 2017-10-05 | 2017-11-22 | Freeflow Tech Limited | Apparatus and Method |
| CN112219044B (zh) * | 2018-05-31 | 2022-12-27 | Tq系统公司 | 具有内啮合齿和外啮合齿的牵引机构以及具有牵引机构的传动装置 |
| CN109279312B (zh) * | 2018-11-27 | 2024-02-20 | 深圳市宇道机电技术有限公司 | 自动撕膜设备 |
| FR3095269B1 (fr) * | 2019-04-17 | 2021-11-26 | Mavic Sas | Capteur de mesure d ’effort |
| GB2580446B (en) * | 2019-06-05 | 2020-12-16 | Ebike Systems Ltd | Electrically-assisted pedal cycles |
| GB201912737D0 (en) * | 2019-09-04 | 2019-10-16 | Freeflow Tech Limited | Apparatus |
| DE102019134361A1 (de) | 2019-12-13 | 2021-06-17 | Auma Riester Gmbh & Co. Kg | Vorrichtung und Verfahren zur Drehmomentmessung in einem Stellantrieb |
| CN110878794B (zh) * | 2019-12-27 | 2024-04-12 | 瓦房店轴承集团国家轴承工程技术研究中心有限公司 | 轧机工作辊用双列圆锥滚子止推轴承 |
| DE102020203714B4 (de) * | 2020-03-23 | 2021-10-07 | Zf Friedrichshafen Ag | Antriebseinheit und Baugruppe |
| CN111547639B (zh) * | 2020-05-12 | 2021-07-16 | 天长市千盛建设有限公司 | 一种建筑工程手动升降装置 |
| TWI734537B (zh) * | 2020-06-23 | 2021-07-21 | 天正國際精密機械股份有限公司 | 迴轉機構 |
| US11338447B2 (en) * | 2020-07-06 | 2022-05-24 | XYZ Robotics Global Inc. | Structural load cell cases for encasing sensors in robotic systems |
| CN112461464A (zh) * | 2020-11-20 | 2021-03-09 | 中国直升机设计研究所 | 一种中心弹性轴承扭转刚度试验加载装置 |
| JP2024504269A (ja) * | 2020-12-24 | 2024-01-31 | テークー-ジステームス ゲーエムベーハー | 外力の測定システム、測定方法、及び電動アシスト自転車 |
| CN113094824B (zh) * | 2021-03-25 | 2021-12-07 | 武汉理工大学 | 大型环件径-轴向轧制协调变形设计方法 |
| JP2022156891A (ja) * | 2021-03-31 | 2022-10-14 | 日本電産コパル電子株式会社 | トルクセンサ |
| CN113567115A (zh) * | 2021-07-22 | 2021-10-29 | 中国船舶重工集团公司第七0三研究所 | 一种用于立式齿轮传动性能验证的轴向加载装置 |
| TWI783587B (zh) * | 2021-07-22 | 2022-11-11 | 姚立和 | 動力輸出扭力感知機構 |
| EP4354109A2 (en) * | 2021-07-26 | 2024-04-17 | TQ-Systems GmbH | External force measurement unit, measurement method, motor unit and electrically assisted bicycle |
| WO2023023241A1 (en) * | 2021-08-18 | 2023-02-23 | National Oilwell Varco, L.P. | Magnetic transmission system |
| CN114184390B (zh) * | 2022-02-16 | 2022-05-06 | 成都中科翼能科技有限公司 | 一种燃气轮机转子轴向力测试传感器及参数设计方法 |
| DE102022203237B3 (de) | 2022-04-01 | 2023-05-25 | Zf Friedrichshafen Ag | Antriebsbaugruppe für ein mit Muskelkraft angetriebenes Fahrzeug und Fahrzeug mit einer solchen Antriebsbaugruppe |
| US11885701B2 (en) * | 2022-05-17 | 2024-01-30 | New Kailung Gear Co., Ltd | Bicycle torque detector |
| WO2023237171A2 (en) * | 2022-06-06 | 2023-12-14 | Fawzy Michael Romany | A machine of maximize rotational power |
| WO2024074455A1 (de) * | 2022-10-07 | 2024-04-11 | Robert Bosch Gmbh | Antriebseinheit eines mit muskelkraft und/oder motorkraft betreibbaren fahrzeugs |
| US11958567B1 (en) * | 2022-10-28 | 2024-04-16 | Mobiletron Electronics Co., Ltd. | Coaxial mid-drive power device of bicycle |
| DE102022128664B3 (de) | 2022-10-28 | 2024-02-22 | Porsche Ebike Performance Gmbh | Sensoreinheit und Antriebsvorrichtung für ein Elektrofahrrad und Elektrofahrrad |
| CN115628905B (zh) * | 2022-12-19 | 2023-03-10 | 常熟鑫利茗动力科技有限公司 | 一种行星减速器的扭转刚度检测装置 |
| CN117134142B (zh) * | 2023-10-26 | 2024-02-27 | 安费诺汽车连接系统(常州)有限公司 | 充电座分体式端子安装结构 |
| CN117353510B (zh) * | 2023-12-05 | 2024-02-13 | 成都精密电机有限公司 | 一种伺服电机 |
| CN117394607B (zh) * | 2023-12-07 | 2024-03-15 | 成都精密电机有限公司 | 具有跳动监测功能的直流力矩电机 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009507244A (ja) | 2005-09-06 | 2009-02-19 | ザ ティムケン カンパニー | 荷重検出ベアリング |
| US20120017701A1 (en) | 2006-11-06 | 2012-01-26 | Sram. Llc | Crankset based bicycle power measurement |
| JP2016507755A (ja) | 2013-02-22 | 2016-03-10 | トランセンス・テクノロジーズ・ピーエルシーTransense Technologies Plc | トルク測定フレックスプレート |
Family Cites Families (157)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US573230A (en) | 1896-12-15 | Gearing for bicycles | ||
| US499694A (en) | 1893-06-13 | To charles n | ||
| US618190A (en) | 1899-01-24 | George frederick sturgess | ||
| US541713A (en) | 1895-06-25 | Changeable driving-gear | ||
| US550474A (en) | 1895-11-26 | Changeable driving-gear | ||
| US1423028A (en) | 1918-07-13 | 1922-07-18 | Roth Ernest | Driving means for tanning drums |
| US1670144A (en) | 1926-03-08 | 1928-05-15 | Thomas S Ewart | Reverse drive |
| US1877338A (en) | 1929-10-23 | 1932-09-13 | Diamond Chain And Mfg Company | Chain drive |
| US2210240A (en) | 1938-08-03 | 1940-08-06 | Homer K Herrick | Variable transmission mechanism |
| US2326235A (en) | 1940-03-26 | 1943-08-10 | Magus A G | Tread crank mechanism, particularly for cycles |
| US2852954A (en) | 1954-03-05 | 1958-09-23 | Hobbs Transmission Ltd | Power transmission gears |
| US2941421A (en) | 1957-10-08 | 1960-06-21 | Plotti Riccardo | Variable speed transmission suitable for reversing the rotation sense |
| US2966808A (en) | 1958-12-23 | 1961-01-03 | Curtiss Wright Corp | Power actuated hinge device |
| US3068719A (en) | 1961-08-11 | 1962-12-18 | Bell Aerospace Corp | Mechanical drive |
| US3148560A (en) | 1962-11-05 | 1964-09-15 | Emerson Electric Co | Variable speed drive mechanism utilizing belts and pulleys |
| US3258994A (en) | 1963-06-03 | 1966-07-05 | Alex M Gorfin | Speed changing device |
| US3468175A (en) | 1967-08-15 | 1969-09-23 | Jan W Rabek | Transmission |
| JPS4831368Y1 (ja) | 1970-06-30 | 1973-09-26 | ||
| US3726158A (en) | 1971-02-04 | 1973-04-10 | H Brown | Speed-reducing coupling |
| JPS5114653B2 (ja) | 1971-08-30 | 1976-05-11 | ||
| US3861242A (en) | 1973-11-07 | 1975-01-21 | Esco Mfg Co | Composite gear structure |
| US3893532A (en) | 1974-04-29 | 1975-07-08 | Panpacific Recreational Produc | Power assisted golf cart |
| DE2433675C3 (de) | 1974-07-12 | 1981-07-23 | Braren, Rudolf, 8000 München | Planetengetriebe mit Exzenter und Zyklidenverzahnung |
| GB1519588A (en) | 1974-08-02 | 1978-08-02 | Precision Mechanical Dev | Motion transmiting devices |
| US3956930A (en) * | 1974-09-23 | 1976-05-18 | Gse, Inc. | Driveline torque and/or thrust sensor |
| US3950950A (en) | 1975-05-05 | 1976-04-20 | E. I. Du Pont De Nemours And Company | Rotary Rankine engine powered electric generating apparatus |
| US4060006A (en) | 1976-09-20 | 1977-11-29 | International Business Machines Corporation | Device for and method of affixing the ends of a substantially plastic ladder chain to make a continuous ladder chain thereof |
| US4117746A (en) | 1976-10-29 | 1978-10-03 | Compudrive Corporation | Orbital drive mechanism |
| US4227092A (en) | 1977-11-30 | 1980-10-07 | The United States Of America As Represented By The Secretary Of The Army | Hand cranked electrical power source |
| US4235129A (en) | 1978-03-30 | 1980-11-25 | Isamu Takasu | Speed reduction mechanism |
| US4194415A (en) | 1978-05-08 | 1980-03-25 | Dimitracopoulos Panayotis C | Quadrant drive |
| US4223757A (en) | 1978-06-30 | 1980-09-23 | Gustafson Mfg. Co. | Forward and reverse power control apparatus |
| AT372767B (de) | 1978-08-24 | 1983-11-10 | Falkner Raimund | Untersetzungsgetriebe |
| US4307630A (en) | 1979-10-15 | 1981-12-29 | Osborn Merritt A | Gearing |
| DE3009454A1 (de) * | 1980-03-12 | 1981-09-24 | Fried. Krupp Gmbh, 4300 Essen | Messeinheit zur ermittlung der belastung von wellen |
| IE51023B1 (en) | 1980-04-02 | 1986-09-03 | Precision Mechanical Dev | Motion transmitting devices having a toothed wheel and independently movable meshing elements |
| JPS61547Y2 (ja) | 1980-04-28 | 1986-01-09 | ||
| US4429595A (en) | 1980-10-23 | 1984-02-07 | Emerson Electric Co. | Motion transmitting device |
| IE820231L (en) | 1981-02-09 | 1982-08-09 | Prec Mechanical Developments L | Quadrant drive motion transmitting device - i.e. having¹tooth engagement of more than one tooth |
| DE3131612A1 (de) | 1981-08-10 | 1983-02-24 | Zahnräderfabrik Renk AG, 8900 Augsburg | Getriebe zur positionierung von sonnenenergie-kollektoren |
| US4471672A (en) | 1981-11-18 | 1984-09-18 | Emerson Electric Co. | Motion transmitting system |
| US4567790A (en) | 1981-11-18 | 1986-02-04 | Emerson Electric Company | Motion transmitting system |
| US4518308A (en) | 1982-03-01 | 1985-05-21 | Acrobe Technology Inc. | Manipulator apparatus |
| US4584904A (en) | 1982-03-26 | 1986-04-29 | Advanced Energy Concepts '81, Limited | Epicyclic transmission having free rolling roller driving elements |
| JPS58220720A (ja) | 1982-06-16 | 1983-12-22 | Mitsuboshi Belting Ltd | タイミングベルトならびにダブルタイミングベルトの製造方法 |
| WO1984000056A1 (en) | 1982-06-18 | 1984-01-05 | Matsushita Electric Ind Co Ltd | Reduction gear |
| JPS59187152A (ja) | 1983-04-06 | 1984-10-24 | Yamaha Motor Co Ltd | 減速装置 |
| JPS59187152U (ja) | 1983-05-31 | 1984-12-12 | 株式会社東芝 | 半導体装置の冷却装置 |
| US4491033A (en) | 1983-06-23 | 1985-01-01 | Usm Corporation | Double eccentric wave generator arrangement |
| US4604916A (en) | 1984-02-10 | 1986-08-12 | Advanced Energy Concepts '81 Ltd. | Epicyclic transmission having cam driven roller retainer |
| JPH0243813B2 (ja) | 1984-06-13 | 1990-10-01 | Mitsubishi Metal Corp | Gasutaabinyokokyodocokitainetsugokin |
| US4583962A (en) | 1984-12-07 | 1986-04-22 | Litens Automotive Inc. | Timing belt tensioner with damped constant spring tensioning and belt tooth disegagement prevention |
| EP0201730B1 (en) | 1985-04-12 | 1989-12-27 | Beijing Institute of Aeronautics and Astronautics | Eccentric gearing with oscillating teeth elements |
| DE8513367U1 (de) | 1985-05-07 | 1986-06-26 | Krueger-Beuster, Helmut, 2420 Eutin | Umlaufrädergetriebe |
| US4627341A (en) * | 1985-09-06 | 1986-12-09 | New Holland, Inc. | Bale density control sensing apparatus and method |
| US4715247A (en) | 1985-09-26 | 1987-12-29 | Kabushiki Kaisha Toshiba | Transmission apparatus with reduced frictional force |
| US4807494A (en) | 1986-07-31 | 1989-02-28 | Lew Hyok S | Stepwise variable speed planetary drive |
| US4729756A (en) | 1987-01-29 | 1988-03-08 | Emerson Electric Co. | Roller chain |
| JP2503027B2 (ja) | 1987-09-21 | 1996-06-05 | 株式会社ハーモニック・ドライブ・システムズ | 撓みかみ合い式歯車装置 |
| DE3736154A1 (de) * | 1987-10-26 | 1989-05-03 | Schenck Ag Carl | Kraftmessdose |
| DE3738521C1 (de) | 1987-11-13 | 1988-12-01 | Delta Getriebe Gmbh | Planetengetriebe |
| JPH01261537A (ja) | 1988-04-08 | 1989-10-18 | Sumitomo Heavy Ind Ltd | 外ピン駆動形遊星歯車減速機 |
| US4900165A (en) * | 1988-08-15 | 1990-02-13 | Union Carbide Corporation | Bearing support system |
| JPH02271144A (ja) | 1989-03-04 | 1990-11-06 | Man Roland Druckmas Ag | 遊星歯車装置 |
| US5445572A (en) | 1991-01-15 | 1995-08-29 | Parker; Bruce H. | Low cost, lightweight differential |
| US5286237A (en) | 1991-08-13 | 1994-02-15 | Sumitomo Heavy Industries, Ltd. | Inscribed meshing planetary gear construction |
| US5123300A (en) | 1991-08-28 | 1992-06-23 | Dynamics Research & Development Corp. | Phasing transmission |
| DE4309871A1 (de) * | 1993-03-26 | 1994-09-29 | Fichtel & Sachs Ag | Anordnung zur Befestigung einer Kupplung an einer Kurbelwelle |
| US5417186A (en) | 1993-06-28 | 1995-05-23 | Clemson University | Dual-acting apparatus for variable valve timing and the like |
| US5662008A (en) | 1993-08-30 | 1997-09-02 | Teijin Seiki Boston, Inc. | Extended contact harmonic drive devices |
| US5456139A (en) | 1993-08-30 | 1995-10-10 | Teppin Seiki Boston, Inc. | Tooth profile arrangement to eliminate tooth intererence in extended contact harmonic drive devices |
| DE19503137C1 (de) | 1995-02-01 | 1996-09-26 | Fichtel & Sachs Ag | Betätigungsvorrichtung, insbesondere für ein Fahrzeug |
| US5772573A (en) | 1996-02-26 | 1998-06-30 | Baker Hughes Incorporated | Decanter centrifuge and gear box with harmonic drive and associated operating method |
| JP3698855B2 (ja) | 1996-07-31 | 2005-09-21 | ナブテスコ株式会社 | 回転運動伝動装置 |
| JP3786377B2 (ja) | 1996-10-02 | 2006-06-14 | 株式会社ハーモニック・ドライブ・システムズ | 位相調整装置 |
| JP3336603B2 (ja) | 1996-11-05 | 2002-10-21 | トヨタ自動車株式会社 | 動力舵取り装置 |
| US5954611A (en) | 1997-06-04 | 1999-09-21 | Davinci Technology Corporation | Planetary belt transmission and drive |
| KR100262485B1 (ko) | 1997-05-15 | 2000-08-01 | 정재연 | 일방향 자전거 구동장치 |
| JP3924858B2 (ja) | 1997-09-02 | 2007-06-06 | 株式会社明電舎 | ホームエレベータ昇降用駆動装置 |
| EP0903471B1 (de) | 1997-09-19 | 2001-12-05 | TCG UNITECH Aktiengesellschaft | Vorrichtung zur verstellung der nockenwelle einer brennkraftmaschine mit innerer verbrennung |
| CN2312173Y (zh) | 1997-11-25 | 1999-03-31 | 北京中技克美谐波传动有限责任公司 | 一种电动助力自行车 |
| US6191561B1 (en) | 1998-01-16 | 2001-02-20 | Dresser Industries, Inc. | Variable output rotary power generator |
| JPH11227666A (ja) * | 1998-02-13 | 1999-08-24 | Bridgestone Cycle Co | 自転車用補助動力装置 |
| JPH11258078A (ja) * | 1998-03-09 | 1999-09-24 | Toyoda Mach Works Ltd | トルク検出装置 |
| DE69830314T2 (de) | 1998-03-25 | 2006-02-02 | Harmonic Drive Systems Inc. | Phasenregler |
| US6026711A (en) | 1998-09-10 | 2000-02-22 | Harmonic Drive Technologies | Harmonic drive bearing arrangement |
| EP1133682B1 (en) * | 1998-10-30 | 2004-03-17 | Vernon A. Lambson | Method and apparatus for measuring torque |
| US6296072B1 (en) | 1999-01-20 | 2001-10-02 | Opti-Bike Llc | Electric bicycle and methods |
| US6148684A (en) | 1999-03-10 | 2000-11-21 | Heidelberger Druckmaschinen Aktiengesellschaft | Anti-backlash gear |
| US6328006B1 (en) | 1999-03-23 | 2001-12-11 | Tcg Unitech Aktiengesellschaft | Device for adjusting the phase angle of a camshaft of an internal combustion engine |
| DE19917020C2 (de) * | 1999-04-15 | 2001-09-13 | Dieter Michael Krone | Meßbuchse zur Erfassung von radialen Lagerkräften |
| US6258007B1 (en) | 1999-05-27 | 2001-07-10 | Teijin Seiki Boston, Inc | Multi-sensor harmonic drive actuator arrangement assembly |
| DE10010680C2 (de) | 2000-03-04 | 2002-01-03 | Oechsler Ag | Wellgetriebe und Innenrad für ein solches Getriebe |
| DE10012601A1 (de) | 2000-03-04 | 2001-10-04 | Oechsler Ag | Wellgetriebe und Innenrad für ein solches Getriebe |
| DE10026038C2 (de) | 2000-05-25 | 2002-04-25 | Oechsler Ag | Wellgetriebe mit Axialabtrieb |
| JP2003019996A (ja) * | 2001-07-09 | 2003-01-21 | Toshio Nakahira | 電気式補助動力付自転車の踏力検出装置 |
| US7294078B2 (en) | 2002-05-21 | 2007-11-13 | Delphi Technologies, Inc. | Over-molded beaded cable for driving applications |
| AU2003272557B2 (en) | 2002-09-17 | 2008-12-18 | Ebi, L.P. | Unilateral fixator |
| US7249534B1 (en) | 2002-10-15 | 2007-07-31 | Raytheon Company | Leadscrew mechanical drive with differential leadscrew follower structure |
| US6982498B2 (en) | 2003-03-28 | 2006-01-03 | Tharp John E | Hydro-electric farms |
| JP2004301761A (ja) * | 2003-03-31 | 2004-10-28 | Toyota Industries Corp | 巻掛伝動部材の張力検出装置及びトルク検出装置 |
| US7549357B2 (en) | 2003-04-04 | 2009-06-23 | Hammerbeck John P R | Ratio changing method and apparatus |
| US7051696B2 (en) * | 2003-09-30 | 2006-05-30 | Honda Motor Co., Ltd. | Bearing structure of crankshaft in internal combustion engine |
| US20070158497A1 (en) | 2003-10-09 | 2007-07-12 | Edelson Jonathan S | Geared wheel motor design |
| DE102004018947A1 (de) | 2004-04-20 | 2005-11-17 | Daimlerchrysler Ag | Verstellgetriebe für eine Nockenwellenanordnung |
| JP2005330990A (ja) | 2004-05-18 | 2005-12-02 | Mamoru Tamura | 減速機構 |
| WO2006003847A1 (ja) | 2004-07-02 | 2006-01-12 | Honda Motor Co., Ltd. | 減速機付き駆動装置 |
| DE102004032141A1 (de) | 2004-07-02 | 2006-02-23 | Ina-Schaeffler Kg | Nockenwellenversteller |
| US20060027201A1 (en) | 2004-08-09 | 2006-02-09 | Ryou Ono | Engine starter |
| US7178427B2 (en) | 2004-08-26 | 2007-02-20 | Honeywell International, Inc. | Motor driven harmonic drive actuator having an interposed output mechanism |
| ATE483599T1 (de) | 2004-11-22 | 2010-10-15 | Bosch Rexroth Corp | Hydroelektrisches hybridantriebssystem für ein kraftfahrzeug |
| US20060135305A1 (en) | 2004-12-13 | 2006-06-22 | Shmuel Erez | Harmonic belt drive |
| WO2006119033A2 (en) | 2005-04-29 | 2006-11-09 | Delphi Technologies, Inc. | Harmonic drive linear actuator |
| US20060283289A1 (en) | 2005-06-16 | 2006-12-21 | Baudendistel Thomas A | Harmonic drive motor with flex-spline interlock |
| DE102005032222A1 (de) * | 2005-07-09 | 2007-01-25 | Schaeffler Kg | Lageranordnung zur Lagerung wenigstens eines Maschinenelements an einer Stütze |
| US7240570B2 (en) * | 2005-09-06 | 2007-07-10 | The Timken Company | Load-sensing bearing |
| US7552664B2 (en) | 2005-11-04 | 2009-06-30 | Northrop Grumman Guidance and Electronics Co., Inc. | Harmonic drive gear assembly with asymmetrical wave generator and associated flexspline |
| JP2007155076A (ja) | 2005-12-08 | 2007-06-21 | Nabtesco Corp | 車輪駆動装置 |
| JP2007205397A (ja) | 2006-01-31 | 2007-08-16 | Jtekt Corp | 波動歯車装置及び伝達比可変装置 |
| US7421990B2 (en) | 2006-08-22 | 2008-09-09 | Delphi Technologies, Inc. | Harmonic drive camshaft phaser |
| DE102006042786B4 (de) | 2006-09-08 | 2008-09-11 | Wittenstein Ag | Hohlwellengetriebe |
| JP4222407B2 (ja) | 2006-10-25 | 2009-02-12 | トヨタ自動車株式会社 | 動力出力装置およびハイブリッド自動車 |
| JP4397927B2 (ja) | 2006-12-28 | 2010-01-13 | 本田技研工業株式会社 | 自動二輪車用エンジン |
| JP2008174069A (ja) | 2007-01-18 | 2008-07-31 | Mazda Motor Corp | ホイール駆動装置 |
| JP4999475B2 (ja) | 2007-01-24 | 2012-08-15 | 株式会社ハーモニック・ドライブ・システムズ | フラット型波動歯車装置 |
| CN104121345B (zh) * | 2007-02-12 | 2017-01-11 | 福博科知识产权有限责任公司 | 无级变速器及其方法 |
| DE102007019607A1 (de) | 2007-04-02 | 2008-10-16 | Wittenstein Ag | Koaxialgetriebe, insbesondere Hohlwellengetriebe für die industrielle Antriebstechnik |
| US7699329B2 (en) | 2007-04-11 | 2010-04-20 | Sram, Llc | Mounting system for an internal bicycle transmission |
| US20090139357A1 (en) | 2007-12-04 | 2009-06-04 | Harmonic Drive Systems Inc. | Method For Setting Nonpositive Deflection, Maximum Meshable Tooth Profile In Flat Wave Gear Device |
| DE102007055883A1 (de) | 2007-12-20 | 2009-06-25 | Forschungsgesellschaft für Zahnräder und Getriebe mbH | Getriebevorrichtung mit wenigstens zwei Ausgangswellen |
| US7777385B2 (en) | 2008-05-15 | 2010-08-17 | Honeywell International Inc. | Compact, electromagnetically braked actuator assembly |
| JP5064300B2 (ja) | 2008-05-28 | 2012-10-31 | 株式会社ハーモニック・ドライブ・システムズ | 波動歯車式直動機構 |
| KR100988215B1 (ko) | 2008-06-24 | 2010-10-18 | 한국과학기술연구원 | 전위기어를 이용하는 하모닉 감속기 |
| JP4948479B2 (ja) | 2008-06-26 | 2012-06-06 | 株式会社ハーモニック・ドライブ・システムズ | 複合型波動歯車減速機 |
| US8534924B2 (en) | 2008-07-26 | 2013-09-17 | Aktiebolaget Skf | Wheel bearing unit |
| KR100987950B1 (ko) | 2008-12-18 | 2010-10-18 | 삼익에이치디에스(주) | 탄성 이중 링기어형 감속기 |
| US11280394B2 (en) | 2009-03-30 | 2022-03-22 | Tq-Systems Gmbh | Gear, motor-gear unit, vehicle, generator with a gear, and force transmitting element |
| JP5753837B2 (ja) | 2009-03-30 | 2015-07-22 | テークー−ジステームス ゲーエムベーハー | ギヤ、モータ−ギヤユニット、エンジン−ギヤユニット、車両、ギヤを備えた発電機 |
| US8852048B2 (en) | 2010-08-19 | 2014-10-07 | Ben Shelef | Planetary harmonic differential transmission |
| JP5741893B2 (ja) * | 2010-09-03 | 2015-07-01 | 株式会社ジェイテクト | カムシャフト装置 |
| JP5899223B2 (ja) | 2010-10-07 | 2016-04-06 | テークー−ジステームス ゲーエムベーハー | ギヤ、モータ−ギヤユニット、エンジン−ギヤユニット、車両、ギヤを備えた発電機 |
| CN201867275U (zh) * | 2010-11-29 | 2011-06-15 | 盖茨优霓塔传动系统(上海)有限公司 | 一种测量径向力的传感器 |
| FI124566B (fi) * | 2010-12-13 | 2014-10-15 | Konecranes Oyj | Sovitelma laakerin säteisvoimien mittaamiseksi |
| JP2014019169A (ja) * | 2012-07-12 | 2014-02-03 | Nissan Motor Co Ltd | 駆動力配分装置 |
| WO2014060974A1 (de) | 2012-10-18 | 2014-04-24 | Tq-Systems Gmbh | Zahngeometrien für einen harmonic-pin-ring-antrieb |
| EP3163122A1 (de) | 2012-10-18 | 2017-05-03 | TQ-Systems GmbH | Pin-ring für einen harmonic-pin-ring-antrieb |
| CN103017967B (zh) * | 2012-12-06 | 2014-12-03 | 哈尔滨工程大学 | 一种水下轮辐式力传感器 |
| US9228651B2 (en) | 2013-03-05 | 2016-01-05 | Karem Aircraft, Inc. | Compact torque-transmitting gearbox with high reduction ratio |
| US10371240B2 (en) | 2013-03-20 | 2019-08-06 | Tq-Systems Gmbh | Harmonic pin ring gearing |
| DE102013207383B4 (de) * | 2013-04-24 | 2022-03-24 | Schaeffler Technologies AG & Co. KG | Nockenwellenverstelleinrichtung |
| DE102013220871A1 (de) | 2013-10-15 | 2015-04-16 | Continental Automotive Gmbh | Verfahren zum Messen des von einem Fahrer auf die Pedale eines E-Bikes aufgebrachten Drehmomentes und E-Bike |
| DE102014115043B4 (de) | 2014-10-16 | 2021-12-23 | Obrist Technologies Gmbh | Stromaggregat |
| CN104276251B (zh) * | 2014-10-31 | 2017-05-03 | 太仓市荣驰电机有限公司 | 一种电动车中轴力矩传感系统 |
| CN104374511B (zh) * | 2014-12-09 | 2016-06-29 | 株洲联诚集团有限责任公司 | 一种三相感应电机转子轴承径向力测量装置及测量方法 |
| DE102016122845A1 (de) | 2016-11-28 | 2018-05-30 | Tq-Systems Gmbh | Harmonisches Pinring-Getriebe, Drehmomentmessvorrichtung und Freilaufanordnung |
| CN112219044B (zh) | 2018-05-31 | 2022-12-27 | Tq系统公司 | 具有内啮合齿和外啮合齿的牵引机构以及具有牵引机构的传动装置 |
| EP4354109A2 (en) * | 2021-07-26 | 2024-04-17 | TQ-Systems GmbH | External force measurement unit, measurement method, motor unit and electrically assisted bicycle |
-
2016
- 2016-11-28 DE DE102016122845.1A patent/DE102016122845A1/de active Pending
-
2017
- 2017-11-28 EP EP21208360.4A patent/EP3978886B1/de active Active
- 2017-11-28 CN CN201780073655.3A patent/CN110088585B/zh active Active
- 2017-11-28 EP EP17822453.1A patent/EP3545276B1/de active Active
- 2017-11-28 WO PCT/IB2017/057452 patent/WO2018096521A2/de active Application Filing
- 2017-11-28 CN CN202210054793.XA patent/CN114486035A/zh active Pending
- 2017-11-28 EP EP23193087.6A patent/EP4325191A1/de active Pending
- 2017-11-28 JP JP2019528689A patent/JP7093351B2/ja active Active
- 2017-11-28 US US16/462,744 patent/US11286979B2/en active Active
-
2022
- 2022-02-08 US US17/667,124 patent/US11592056B2/en active Active
- 2022-06-17 JP JP2022098131A patent/JP7417669B2/ja active Active
-
2023
- 2023-01-26 US US18/101,964 patent/US11781590B2/en active Active
- 2023-09-01 US US18/241,325 patent/US20230407911A1/en active Pending
-
2024
- 2024-01-05 JP JP2024000890A patent/JP2024029194A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009507244A (ja) | 2005-09-06 | 2009-02-19 | ザ ティムケン カンパニー | 荷重検出ベアリング |
| US20120017701A1 (en) | 2006-11-06 | 2012-01-26 | Sram. Llc | Crankset based bicycle power measurement |
| JP2016507755A (ja) | 2013-02-22 | 2016-03-10 | トランセンス・テクノロジーズ・ピーエルシーTransense Technologies Plc | トルク測定フレックスプレート |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220163063A1 (en) | 2022-05-26 |
| WO2018096521A2 (de) | 2018-05-31 |
| JP2019537019A (ja) | 2019-12-19 |
| US11592056B2 (en) | 2023-02-28 |
| JP7417669B2 (ja) | 2024-01-18 |
| EP4325191A1 (de) | 2024-02-21 |
| US20230407911A1 (en) | 2023-12-21 |
| US20200063793A1 (en) | 2020-02-27 |
| CN114486035A (zh) | 2022-05-13 |
| DE102016122845A1 (de) | 2018-05-30 |
| JP2022120179A (ja) | 2022-08-17 |
| EP3978886A1 (de) | 2022-04-06 |
| WO2018096521A3 (de) | 2018-10-18 |
| JP2024029194A (ja) | 2024-03-05 |
| EP3978886B1 (de) | 2023-10-04 |
| US20230235782A1 (en) | 2023-07-27 |
| CN110088585A (zh) | 2019-08-02 |
| US11286979B2 (en) | 2022-03-29 |
| CN110088585B (zh) | 2022-02-15 |
| US11781590B2 (en) | 2023-10-10 |
| EP3545276A2 (de) | 2019-10-02 |
| EP3545276B1 (de) | 2021-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7093351B2 (ja) | 動力伝動要素、トルク測定装置、及びフリーホイールアセンブリ | |
| JP2019537019A5 (ja) | ||
| US11808338B2 (en) | Harmonic pin ring gearing | |
| EP3248822B1 (en) | In-wheel motor | |
| US9140342B2 (en) | Gear, motor-gear unit, vehicle, generator with a gear, and force transmitting element | |
| JP5126428B2 (ja) | 揺動内接式遊星歯車装置および回転駆動装置 | |
| US20140121049A1 (en) | Bicycle drive unit | |
| US20110088496A1 (en) | Harmonic drive using profile shifted gear | |
| US20220081063A1 (en) | Electric assist device for a bicycle | |
| US20160053858A1 (en) | Curved bearing contact system | |
| JP5817735B2 (ja) | 遊星歯車減速機 | |
| KR101468389B1 (ko) | 회전비를 증가시키는 크랭크 조립체 | |
| JP2013130255A (ja) | 電動パーキングブレーキ装置 | |
| CN111895058B (zh) | 一种减速机的成型设计方法 | |
| US11333221B2 (en) | Gear set in which interacting gears have a different circular pitch | |
| WO2014153556A1 (en) | Curved bearing contact system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A529 Effective date: 20190729 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210112 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210909 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210921 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220418 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220513 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220617 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7093351 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |