JP5899223B2 - ギヤ、モータ−ギヤユニット、エンジン−ギヤユニット、車両、ギヤを備えた発電機 - Google Patents
ギヤ、モータ−ギヤユニット、エンジン−ギヤユニット、車両、ギヤを備えた発電機 Download PDFInfo
- Publication number
- JP5899223B2 JP5899223B2 JP2013532309A JP2013532309A JP5899223B2 JP 5899223 B2 JP5899223 B2 JP 5899223B2 JP 2013532309 A JP2013532309 A JP 2013532309A JP 2013532309 A JP2013532309 A JP 2013532309A JP 5899223 B2 JP5899223 B2 JP 5899223B2
- Authority
- JP
- Japan
- Prior art keywords
- gear
- wheel
- transmitter
- motor
- ring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000002485 combustion reaction Methods 0.000 claims description 12
- 238000003780 insertion Methods 0.000 claims description 6
- 230000037431 insertion Effects 0.000 claims description 6
- 238000003825 pressing Methods 0.000 description 48
- 230000033001 locomotion Effects 0.000 description 38
- 238000013461 design Methods 0.000 description 32
- 230000005540 biological transmission Effects 0.000 description 23
- 230000009467 reduction Effects 0.000 description 17
- 229910000831 Steel Inorganic materials 0.000 description 14
- 239000010959 steel Substances 0.000 description 14
- 230000008901 benefit Effects 0.000 description 9
- 229910052751 metal Inorganic materials 0.000 description 9
- 239000002184 metal Substances 0.000 description 9
- 229920003023 plastic Polymers 0.000 description 9
- 230000001360 synchronised effect Effects 0.000 description 9
- 238000004804 winding Methods 0.000 description 9
- 239000004033 plastic Substances 0.000 description 8
- 230000005672 electromagnetic field Effects 0.000 description 7
- 125000006850 spacer group Chemical group 0.000 description 7
- 230000009471 action Effects 0.000 description 5
- 238000005553 drilling Methods 0.000 description 5
- 238000010248 power generation Methods 0.000 description 5
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 4
- 229910052782 aluminium Inorganic materials 0.000 description 4
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 4
- 239000003990 capacitor Substances 0.000 description 4
- 238000001816 cooling Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 239000003921 oil Substances 0.000 description 4
- 230000004308 accommodation Effects 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 238000009826 distribution Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000006698 induction Effects 0.000 description 2
- 229910052742 iron Inorganic materials 0.000 description 2
- 239000010687 lubricating oil Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000000087 stabilizing effect Effects 0.000 description 2
- 229910000906 Bronze Inorganic materials 0.000 description 1
- 229910000760 Hardened steel Inorganic materials 0.000 description 1
- 240000004752 Laburnum anagyroides Species 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 239000010974 bronze Substances 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- KUNSUQLRTQLHQQ-UHFFFAOYSA-N copper tin Chemical compound [Cu].[Sn] KUNSUQLRTQLHQQ-UHFFFAOYSA-N 0.000 description 1
- 239000010779 crude oil Substances 0.000 description 1
- 210000001145 finger joint Anatomy 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- ZZUFCTLCJUWOSV-UHFFFAOYSA-N furosemide Chemical compound C1=C(Cl)C(S(=O)(=O)N)=CC(C(O)=O)=C1NCC1=CC=CO1 ZZUFCTLCJUWOSV-UHFFFAOYSA-N 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000017525 heat dissipation Effects 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 238000005461 lubrication Methods 0.000 description 1
- KJFBVJALEQWJBS-XUXIUFHCSA-N maribavir Chemical compound CC(C)NC1=NC2=CC(Cl)=C(Cl)C=C2N1[C@H]1O[C@@H](CO)[C@H](O)[C@@H]1O KJFBVJALEQWJBS-XUXIUFHCSA-N 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000003387 muscular Effects 0.000 description 1
- 239000004745 nonwoven fabric Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 238000011179 visual inspection Methods 0.000 description 1
- 239000002759 woven fabric Substances 0.000 description 1
Images






























































Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H35/00—Gearings or mechanisms with other special functional features
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/44—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M11/00—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels
- B62M11/04—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio
- B62M11/14—Transmissions characterised by the use of interengaging toothed wheels or frictionally-engaging wheels of changeable ratio with planetary gears
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/55—Rider propelled cycles with auxiliary electric motor power-driven at crank shafts parts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H49/00—Other gearings
- F16H49/001—Wave gearings, e.g. harmonic drive transmissions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/04—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying rotary motion
- F16H25/06—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying rotary motion with intermediate members guided along tracks on both rotary members
- F16H2025/066—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying rotary motion with intermediate members guided along tracks on both rotary members the intermediate members being rollers supported in a chain
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H49/00—Other gearings
- F16H49/001—Wave gearings, e.g. harmonic drive transmissions
- F16H2049/003—Features of the flexsplines therefor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/20—Transmissions using gears with orbital motion
- F16H2200/203—Transmissions using gears with orbital motion characterised by the engaging friction means not of the freewheel type, e.g. friction clutches or brakes
- F16H2200/2069—Transmissions using gears with orbital motion characterised by the engaging friction means not of the freewheel type, e.g. friction clutches or brakes using two freewheel mechanism
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
Description

外側ホイールと、
前記外側ホイールに対して同心状に配置された内側ホイールと、
前記外側ホイールと前記内側ホイールとの間に延在する牽引手段と、
前記牽引手段を前記内側ホイールの外周から持ち上げ、前記牽引手段を前記外側ホイールの内周に押し付ける少なくとも1つの回転するトランスミッタと、
を含むギヤ。
前記トランスミッタ組立体は、回転可能なトランスミッタキャリア上に設けられた第1のトランスミッタ要素及び第2のトランスミッタ要素を含み、前記第1のトランスミッタ要素及び第2のトランスミッタ要素は、前記トランスミッタキャリア上で回転可能であり、前記トランスミッタ要素のそれぞれが、前記トランスミッタキャリアの回転軸に対して偏心して設けられているトランスミッタ組立体。
外側ホイールと、
前記外側ホイールに対して同心状に配置された内側ホイールと、
前記外側ホイールと前記内側ホイールとの間に延在する押圧手段と、
前記押圧手段を前記外側ホイールの内周から離すように押し、前記押圧手段を前記内側ホイールの外周に押し付ける少なくとも1つの回転するトランスミッタと、
を有することを特徴とするギヤ。
前記スプライン要素が複数のピンを含み、前記複数のピンが、前記スプライン要素の少なくとも1つの軸方向の面から突出し、前記可撓性のスプライン要素に対して同軸状に配置されている可撓性のスプライン要素。
電気モータのロータへ連結するトランスミッタと、
前記トランスミッタに支持されたボールベアリングと、
可撓性手段と、
前記外側リングギヤの回転を受け取る出力シャフトと、
を含み、前記可撓性手段は、実質的に円周上に配分され、ケーシングに取り付けて設けられ、前記ピンリングのピンを挿入するための開口部を含む、ハーモニックピンドライブ。
入力シャフトに連結するトランスミッタと、
前記トランスミッタに支持されるボールベアリングと、
可撓性手段と、
ピンを備えたピンリングと、
前記出力リングギヤの回転を受け取る出力シャフトと、
を含み、前記可撓性手段は、実質的に円周上に配分され、ハーモニックピンドライブのケーシングに取り付けて設けられ、前記ピンリングの前記ピンは、前記可撓性手段に連結され、前記ピンの少なくとも1本が前記外側リングギヤの内歯に係合する、ハーモニックピンギヤ。
外側スチールリングと、
前記外側スチールリングに固定された収容リングと、
を含み、前記収容リングは、前記外側スチールリングに対して径方向内側に配置され、ピンを収容するのに適した丸い開口部を含む、多層ピンリング。
前記第1のギヤの出力シャフトに第1穿孔ディスクが連結され、前記第2のギヤの出力シャフトに第2穿孔ディスクが連結され、前記第1穿孔ディスク及び前記第2穿孔ディスクのそれぞれの穴が管を収容するように構成されており、前記第1のギヤの入力シャフトがモータに連結され、前記第2ギヤの入力シャフトがモータに連結されることを特徴とする傾斜調節装置。
楔形エッジを備えた中空歯付きホイールと、
ネジ山を備えたシャフトと、
をさらに含み、前記中空歯付きホイールは前記歯付きホイールと係合し、前記中空歯付きホイールの前記楔形エッジは、シャフトの前記ネジ山に係合することを特徴とするスピンドルドライブ。
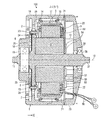
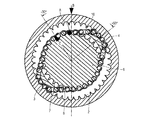
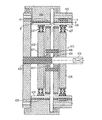
2 外側ホイール歯
3 第1のトランスミッタ、引込部
4 第2のトランスミッタ、引込部
5 トランスミッタキャリア(ロータ)
6 内側ホイール
7 内側ホイール歯
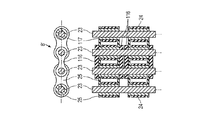
8 ローラチェーン
9 後方ハウジング部
10 対称軸
11 出力シャフト
16 前方ハウジング部
17 中央ハウジング部
18 ベアリング支持体
21 永久磁石
22 ステータ(電機子)
50 ステータプレート
80 ギヤホイール
82 第2のチェーン
87 第1のチェーン
88 第3のチェーン
90 トランスミッタディスク
91 シャフト
92 シャフト
93 ギヤホイール
94 ギヤホイール
100 モータ−ギヤユニット
100 チェーンスライド
103 チェーンスライド(引込)ホルダ
109、110 円形状のディスク
113 シャフト
131 押圧手段
133 押圧ホイール
134 キャリアリング
135 安定化ホイール
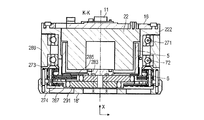
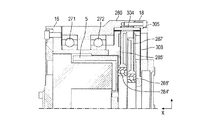
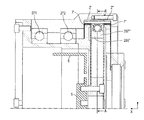
268 支持シリンダ
269 出力リング
271 モータ側の出力ベアリング
272 ギヤ側の出力ベアリング
275 外側ホイールホルダ
276 外側ホイール
281 外側ホイール保持リング
282 偏心カムホルダ
283 モータ側の偏心カム
284 モータ側の偏心カムベアリング
285 モータ側の引込リング
287 ギヤ側の引込リング
288 ギヤ側の偏心カムベアリング
290 スペーサリング
291 ギヤ側の偏心カム
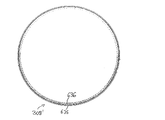
302 ワイヤレースベアリング
305 ピン
308 ピンリング
400 減速ギヤ
401、425、442 駆動シャフト
402 ハウジング
403、454 従動シャフト
404、426、426' 楕円形引込ディスク
405、427、427' ワイヤレースベアリング
406、428、428'、513 ピンリング
407 従動側ピン
408、410 駆動側ハウジング部品
409 クロスローラベアリング
411、412、431、431'、445、468、469、481、482、497、512、522、611、617、626、631 ボールベアリング
414、423 共回転ハウジング部品
417、418、419、452、453 引込箇所
420 第1ギヤ段
421 第2ギヤ段
422 固定されたハウジング部品
425'、624 出力シャフト
429、429'、450、451、601 ピン
430、508、577 中空シャフト
440、441 円形引込ディスク
443 第1ボールベアリング
444 第2ボールベアリング
446、474 ギヤハウジング
447 第1ピンリング
448 第2ピンリング
449 スリット
455、490 内側ボールベアリング
456 外側ボールベアリング
470、470' 2本チェーンのハーモニックチェーンドライブ
471 外側ロータモータ
472、473 ギヤ段
475 ペダルシャフト
476、478 引込部
477、495 回転可能な外側ホイール
479 固定された外側ホイール
480 フリーホイール
487 遊星ギヤ
488 遊星キャリア
489 固定された中空リング
496 後方ハウジング部品
498、499 引込領域
500 環状ディスク
501、502 支持ギヤ
503 ドリルロッド
504 ロータ
505 上方穿孔ディスク
506 下方穿孔ディスク
507 上方電磁クラッチ
509 下方電磁ディスク
510 第1ハーモニックチェーンドライブ
511、521 引込ディスク
514 内側ホイール歯
515、525、541 内側ホイール
516 外側ホイール歯
517 ハウジング部品
518 傾斜調節装置
520 第2ハーモニックチェーンドライブ
523、529 モータ
528 台
530 支持体
531、571 ハーモニックチェーンドライブ
533 歯付きリング
534 位相調整減速機
535 第1ハーモニックチェーンギヤ
536 第2ハーモニックチェーンギヤ
538 第1引込ディスク
539 第1牽引手段
540 第2牽引手段
542 第2引込ディスク
543 第1剛性内側ギヤ
544 第2剛性内側ギヤ
550 位相調整器具
551 小規模サーボモータ制御装置
552 モータシャフト
554 ブレーキディスク
556 摺動プレート
557 圧縮コイルばね
558 制御ディスク
559 制御面
560 制御面従動子
562 小規模モータ
570 スピンドルドライブ
572 第1歯付きホイール
573 第2歯付きホイール
574 楔形エッジ
575 シャフトのネジ山
576 シャフト
600 ハーモニックピンドライブ
602 ばねロッド
603 ケーシング
604 軸
605、618 円筒形部分
606 コイル
607 内側シリンダ
608 トランスミッタ部分
609 溝状ボールベアリング
610 環状ボールベアリング
612 外側円筒形部分
613 モータ出力部品
614 ディスク形状部品
615 内側円筒形部分
616 保持ディスク
619 出力部品
621 ニードルベアリング
622 外側フリーホイール
625 内側フリーホイール
627 カップ形部品
628 ダブルボールベアリング
630 モータカバー
632 冷却フィン
633 外側シリンダ
635 スチールリング
636 収容リング
637 開口部
638 外側ベアリング面
Claims (15)
- 入力シャフト及び出力シャフトを有するギヤであって、該ギヤがさらに、
外側ホイールと、
前記外側ホイールに対して同心状に配置された内側ホイールと、
前記外側ホイールと前記内側ホイールとの間に延在する牽引手段と、
前記牽引手段を前記内側ホイールの外周から持ち上げ、前記牽引手段を前記外側ホイールの内周に押し付ける少なくとも1つの回転するトランスミッタと、
を含み、前記牽引要素は、ピンを収容するのに適した丸い開口部を備えた収容リングを含み、前記ピンは前記収容リングの前記開口部に備えられ、前記ピンは両端において前記収容リングから突出し、前記収容リングの前記丸い開口部は、それぞれが前記収容リングの内側で挿入スリットを形成し、前記回転するトランスミッタは、楕円形ディスクと、該楕円形ディスクの外周上に備えられた可撓性ベアリングとを含む、ギヤ。 - 前記入力シャフトが前記トランスミッタに連結されることを特徴とする請求項1に記載のギヤ。
- 前記入力シャフトが前記外側ホイールに連結されることを特徴とする請求項1に記載のギヤ。
- 前記入力シャフトが前記内側ホイールに連結されることを特徴とする請求項1に記載のギヤ。
- 前記出力シャフトが前記内側ホイールに連結されることを特徴とする請求項1〜3のいずれか一つに記載のギヤ。
- 前記出力シャフトが前記トランスミッタに連結されることを特徴とする請求項1、3、又は4に記載のギヤ。
- 前記出力シャフトが前記外側ホイールに連結されることを特徴とする請求項1、2、又は4に記載のギヤ。
- 前記トランスミッタが、回転可能なトランスミッタキャリア上に配置されることを特徴とする請求項1〜7のいずれか一つに記載のギヤ。
- 前記トランスミッタが、前記トランスミッタキャリア上に回転可能に設けられることを特徴とする請求項8に記載のギヤ。
- 前記トランスミッタが、前記トランスミッタキャリアの回転軸に対して偏心して設けられることを特徴とする請求項9に記載のギヤ。
- 電気モータを備え、前記電気モータのロータが前記ギヤの前記入力シャフトに連結されることを特徴とする請求項1〜10のいずれか一つに記載のギヤを備えたモータ−ギヤユニット。
- 前記電気モータが、径方向にギャップを有するDCブラシレスモータであることを特徴とする請求項11に記載のモータ−ギヤユニット。
- 内燃エンジンを設え、前記エンジンの出力シャフトが前記ギヤの前記入力シャフトに連結されることを特徴とする請求項1〜10のいずれか一つに記載のギヤを備えたエンジン−ギヤユニット。
- 請求項11〜13のいずれか一つに記載のモータ−ギヤユニット又はエンジン−ギヤユニットを含む車両であって、前記車両の少なくとも1つの駆動される車輪が、前記ギヤの前記出力シャフトに連結されることを特徴とする車両。
- 駆動ユニットと、ジェネレータユニットと、請求項1〜10のいずれか一つに記載のギヤとを有する発電機であって、前記ギヤの入力シャフトが前記駆動ユニットに連結され、前記ギヤの出力シャフトが前記ジェネレータの入力シャフトに連結される発電機。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IB2010054535 | 2010-10-07 | ||
| IBPCT/IB2010/054535 | 2010-10-07 | ||
| PCT/IB2011/054431 WO2012046216A2 (en) | 2010-10-07 | 2011-10-07 | Gear, motor-gear unit, vehicle, generator with a gear, and force transmitting element |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013539848A JP2013539848A (ja) | 2013-10-28 |
| JP2013539848A5 JP2013539848A5 (ja) | 2014-11-27 |
| JP5899223B2 true JP5899223B2 (ja) | 2016-04-06 |
Family
ID=45928166
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013532309A Active JP5899223B2 (ja) | 2010-10-07 | 2011-10-07 | ギヤ、モータ−ギヤユニット、エンジン−ギヤユニット、車両、ギヤを備えた発電機 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9140342B2 (ja) |
| EP (3) | EP3865734A1 (ja) |
| JP (1) | JP5899223B2 (ja) |
| CN (2) | CN103228951B (ja) |
| AU (1) | AU2011311151B2 (ja) |
| DE (1) | DE202011110841U1 (ja) |
| WO (1) | WO2012046216A2 (ja) |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11280394B2 (en) | 2009-03-30 | 2022-03-22 | Tq-Systems Gmbh | Gear, motor-gear unit, vehicle, generator with a gear, and force transmitting element |
| JP5753837B2 (ja) | 2009-03-30 | 2015-07-22 | テークー−ジステームス ゲーエムベーハー | ギヤ、モータ−ギヤユニット、エンジン−ギヤユニット、車両、ギヤを備えた発電機 |
| US20120168239A1 (en) * | 2009-06-24 | 2012-07-05 | Gardes Florian | Self-contained drive system |
| WO2013082584A1 (en) * | 2011-12-02 | 2013-06-06 | Schlumberger Canada Limited | Quick drum connect |
| WO2014027386A1 (ja) * | 2012-08-17 | 2014-02-20 | パナソニック株式会社 | 電動アシスト自転車 |
| WO2014060974A1 (de) * | 2012-10-18 | 2014-04-24 | Tq-Systems Gmbh | Zahngeometrien für einen harmonic-pin-ring-antrieb |
| EP3163122A1 (de) * | 2012-10-18 | 2017-05-03 | TQ-Systems GmbH | Pin-ring für einen harmonic-pin-ring-antrieb |
| WO2014147583A1 (de) | 2013-03-20 | 2014-09-25 | Tq-Systems Gmbh | Harmonisches pinring-getriebe |
| DE102013106930B3 (de) * | 2013-07-02 | 2014-06-26 | Pierburg Gmbh | Zugmittelgetriebe sowie Nockenwellensteller mit derartigem Zugmittelgetriebe |
| DE102013221265A1 (de) * | 2013-10-21 | 2015-05-07 | Schaeffler Technologies Gmbh & Co. Kg | Planetenradlageranordnung |
| US9556008B2 (en) * | 2013-11-05 | 2017-01-31 | Everett Ogden | Winch with drum-encased brushless DC motor |
| JP2017533141A (ja) * | 2014-10-31 | 2017-11-09 | ピアッジオ・エ・チ・ソチエタ・ペル・アツィオーニ | 電動ペダルアシスト自転車用の推進装置およびそれを用いたペダルアシスト自転車 |
| US9523351B2 (en) * | 2014-11-14 | 2016-12-20 | General Electric Company | System for packaging electronic components in a rotatable shaft |
| DE102015100676B3 (de) * | 2015-01-19 | 2016-06-09 | Unicorn Energy GmbH | Antriebsbaugruppe für ein manuell angetriebenes Fahrzeug mit einem elektrischen Hilfsantrieb, Verfahren zum Regeln einer solchen Antriebsbaugruppe und Verwendung, Verfahren zum Regeln eines Fahrzeuges und Fahrzeug |
| KR101652703B1 (ko) * | 2015-02-02 | 2016-09-01 | 주식회사 세진아이지비 | 동력전달장치 |
| CN104944261A (zh) * | 2015-06-30 | 2015-09-30 | 浙江玛拓驱动设备有限公司 | 一种用于外转子曳引机的机座结构 |
| DE102016002417B4 (de) * | 2016-03-02 | 2017-12-14 | Infineon Technologies Ag | Winkelsensoranordnung und Elektrofahrrad mit einer solchen Winkelsensoranordnung |
| US10107130B2 (en) * | 2016-03-24 | 2018-10-23 | United Technologies Corporation | Concentric shafts for remote independent variable vane actuation |
| US10006520B2 (en) | 2016-08-31 | 2018-06-26 | General Electric Company | System for regulating stresses in ring gears |
| DE102016122845A1 (de) | 2016-11-28 | 2018-05-30 | Tq-Systems Gmbh | Harmonisches Pinring-Getriebe, Drehmomentmessvorrichtung und Freilaufanordnung |
| DE102017106926B4 (de) * | 2017-03-30 | 2019-02-07 | Zollern Gmbh & Co. Kg | Anzeigeeinrichtung für die visuelle Kontrolle eines Flüssigkeitsfüllstands insbesondere in einem Getriebe |
| US10655610B2 (en) | 2017-04-28 | 2020-05-19 | General Electric Company | Wire races for wind turbine bearings |
| GB201716311D0 (en) | 2017-10-05 | 2017-11-22 | Freeflow Tech Limited | Apparatus and Method |
| TWI652419B (zh) * | 2017-10-31 | 2019-03-01 | 摩特動力工業股份有限公司 | 持續出力之無段變速器 |
| CA3088784A1 (en) * | 2018-01-16 | 2019-07-25 | Bastian Solutions, Llc | High torque eccentric electric motor |
| CN109617313B (zh) * | 2018-02-27 | 2021-01-08 | 前沿驱动(北京)技术有限公司 | 一种执行器、机械臂及机器人 |
| CN115750725A (zh) * | 2018-05-31 | 2023-03-07 | Tq系统公司 | 具有内啮合齿和外啮合齿的牵引机构以及具有牵引机构的传动装置 |
| DE102018128028B3 (de) * | 2018-11-09 | 2020-03-05 | Schaeffler Technologies AG & Co. KG | Wellgetriebe für einen elektromechanischen Nockenwellenversteller |
| EP3779239B1 (de) * | 2019-08-13 | 2021-08-11 | maxon international ag | Hochuntersetzendes getriebe |
| CN113086383B (zh) * | 2019-12-23 | 2022-11-11 | 新疆金风科技股份有限公司 | 运输工装结构、带运输工装的分瓣电机模块及运输方法 |
| CN111834754A (zh) * | 2020-06-22 | 2020-10-27 | 西安工程大学 | 一种用于大型射电望远镜主反射面主动控制系统的促动器 |
| WO2022108635A1 (en) * | 2020-08-12 | 2022-05-27 | Joby Aero, Inc. | Compact offset outrunner harmonic drive rotary actuator and deployment system using same |
| DE102020130601B3 (de) * | 2020-11-19 | 2022-03-10 | Fazua Gmbh | Antriebsvorrichtung für ein Elektrofahrrad und Elektrofahrrad |
| US11732767B2 (en) | 2020-12-28 | 2023-08-22 | Honeywell International Inc. | Electric brake |
| CN112797122B (zh) * | 2020-12-30 | 2022-05-24 | 苏州绿科智能机器人研究院有限公司 | 一种行星齿轮一体式减速器 |
| CN112814489A (zh) * | 2021-02-03 | 2021-05-18 | 广东金力变速科技股份有限公司 | 基于霍尔线性器件的电动锁防误锁装置、方法及控制器 |
| CN113326579B (zh) * | 2021-05-21 | 2023-01-10 | 武汉理工大学 | 谐波传动系统动力学模型的建立方法、装置及存储介质 |
| DE102022103634A1 (de) * | 2022-02-16 | 2023-08-17 | Porsche Ebike Performance Gmbh | Antriebsvorrichtung für ein Elektrofahrrad und Elektrofahrrad |
Family Cites Families (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US573230A (en) | 1896-12-15 | Gearing for bicycles | ||
| US541713A (en) | 1895-06-25 | Changeable driving-gear | ||
| US550474A (en) | 1895-11-26 | Changeable driving-gear | ||
| US499694A (en) | 1893-06-13 | To charles n | ||
| US618190A (en) | 1899-01-24 | George frederick sturgess | ||
| US1423028A (en) | 1918-07-13 | 1922-07-18 | Roth Ernest | Driving means for tanning drums |
| US1670144A (en) | 1926-03-08 | 1928-05-15 | Thomas S Ewart | Reverse drive |
| US1877338A (en) | 1929-10-23 | 1932-09-13 | Diamond Chain And Mfg Company | Chain drive |
| US2210240A (en) | 1938-08-03 | 1940-08-06 | Homer K Herrick | Variable transmission mechanism |
| US2326235A (en) | 1940-03-26 | 1943-08-10 | Magus A G | Tread crank mechanism, particularly for cycles |
| US2852954A (en) | 1954-03-05 | 1958-09-23 | Hobbs Transmission Ltd | Power transmission gears |
| US2941421A (en) * | 1957-10-08 | 1960-06-21 | Plotti Riccardo | Variable speed transmission suitable for reversing the rotation sense |
| US3148560A (en) | 1962-11-05 | 1964-09-15 | Emerson Electric Co | Variable speed drive mechanism utilizing belts and pulleys |
| JPS5114653B2 (ja) * | 1971-08-30 | 1976-05-11 | ||
| US3893532A (en) | 1974-04-29 | 1975-07-08 | Panpacific Recreational Produc | Power assisted golf cart |
| GB1519588A (en) * | 1974-08-02 | 1978-08-02 | Precision Mechanical Dev | Motion transmiting devices |
| US4223757A (en) | 1978-06-30 | 1980-09-23 | Gustafson Mfg. Co. | Forward and reverse power control apparatus |
| AT372767B (de) | 1978-08-24 | 1983-11-10 | Falkner Raimund | Untersetzungsgetriebe |
| US4471672A (en) * | 1981-11-18 | 1984-09-18 | Emerson Electric Co. | Motion transmitting system |
| US4567790A (en) * | 1981-11-18 | 1986-02-04 | Emerson Electric Company | Motion transmitting system |
| JPS61547U (ja) * | 1984-06-08 | 1986-01-06 | 株式会社明電舎 | 調和変速機 |
| US4583962A (en) | 1984-12-07 | 1986-04-22 | Litens Automotive Inc. | Timing belt tensioner with damped constant spring tensioning and belt tooth disegagement prevention |
| DE8513367U1 (de) | 1985-05-07 | 1986-06-26 | Krueger-Beuster, Helmut, 2420 Eutin | Umlaufrädergetriebe |
| US4729756A (en) | 1987-01-29 | 1988-03-08 | Emerson Electric Co. | Roller chain |
| DE3738521C1 (de) | 1987-11-13 | 1988-12-01 | Delta Getriebe Gmbh | Planetengetriebe |
| JPH01261537A (ja) * | 1988-04-08 | 1989-10-18 | Sumitomo Heavy Ind Ltd | 外ピン駆動形遊星歯車減速機 |
| US5445572A (en) | 1991-01-15 | 1995-08-29 | Parker; Bruce H. | Low cost, lightweight differential |
| CN2110743U (zh) * | 1991-06-28 | 1992-07-22 | 谢汉波 | 谐波链带传动减速器 |
| US5286237A (en) * | 1991-08-13 | 1994-02-15 | Sumitomo Heavy Industries, Ltd. | Inscribed meshing planetary gear construction |
| CN2114064U (zh) * | 1992-03-11 | 1992-08-26 | 黄幼德 | 谐波链式变速传动器 |
| DE19549626A1 (de) | 1995-02-01 | 1999-09-09 | Mannesmann Sachs Ag | Betätigungsvorrichtung, insbesondere für ein Fahrzeug |
| US5954611A (en) * | 1997-06-04 | 1999-09-21 | Davinci Technology Corporation | Planetary belt transmission and drive |
| KR100262485B1 (ko) | 1997-05-15 | 2000-08-01 | 정재연 | 일방향 자전거 구동장치 |
| JP3924858B2 (ja) * | 1997-09-02 | 2007-06-06 | 株式会社明電舎 | ホームエレベータ昇降用駆動装置 |
| CN2312173Y (zh) | 1997-11-25 | 1999-03-31 | 北京中技克美谐波传动有限责任公司 | 一种电动助力自行车 |
| US6191561B1 (en) | 1998-01-16 | 2001-02-20 | Dresser Industries, Inc. | Variable output rotary power generator |
| US6026711A (en) | 1998-09-10 | 2000-02-22 | Harmonic Drive Technologies | Harmonic drive bearing arrangement |
| US6148684A (en) * | 1999-03-10 | 2000-11-21 | Heidelberger Druckmaschinen Aktiengesellschaft | Anti-backlash gear |
| JP2004125060A (ja) * | 2002-10-02 | 2004-04-22 | Toyota Motor Corp | 緩衝型無端鎖 |
| US7249534B1 (en) * | 2002-10-15 | 2007-07-31 | Raytheon Company | Leadscrew mechanical drive with differential leadscrew follower structure |
| US6982498B2 (en) * | 2003-03-28 | 2006-01-03 | Tharp John E | Hydro-electric farms |
| CA2520833A1 (en) | 2003-04-04 | 2004-10-14 | John P. R. Hammerbeck | Ratio changing method and apparatus |
| JP4248334B2 (ja) * | 2003-07-18 | 2009-04-02 | 株式会社ハーモニック・ドライブ・システムズ | 波動歯車装置 |
| JP2005330990A (ja) | 2004-05-18 | 2005-12-02 | Mamoru Tamura | 減速機構 |
| US20060027201A1 (en) | 2004-08-09 | 2006-02-09 | Ryou Ono | Engine starter |
| DE602005024041D1 (de) | 2004-11-22 | 2010-11-18 | Bosch Rexroth Corp | Hydroelektrisches hybridantriebssystem für ein kraftfahrzeug |
| JP2007205397A (ja) * | 2006-01-31 | 2007-08-16 | Jtekt Corp | 波動歯車装置及び伝達比可変装置 |
| JP4397927B2 (ja) | 2006-12-28 | 2010-01-13 | 本田技研工業株式会社 | 自動二輪車用エンジン |
| US7699329B2 (en) | 2007-04-11 | 2010-04-20 | Sram, Llc | Mounting system for an internal bicycle transmission |
| KR100987950B1 (ko) * | 2008-12-18 | 2010-10-18 | 삼익에이치디에스(주) | 탄성 이중 링기어형 감속기 |
| US7952402B2 (en) | 2009-02-06 | 2011-05-31 | Standard Microsystems Corporation | Power-up control for very low-power systems |
| JP5753837B2 (ja) | 2009-03-30 | 2015-07-22 | テークー−ジステームス ゲーエムベーハー | ギヤ、モータ−ギヤユニット、エンジン−ギヤユニット、車両、ギヤを備えた発電機 |
| US8852048B2 (en) | 2010-08-19 | 2014-10-07 | Ben Shelef | Planetary harmonic differential transmission |
-
2011
- 2011-10-07 JP JP2013532309A patent/JP5899223B2/ja active Active
- 2011-10-07 DE DE202011110841.8U patent/DE202011110841U1/de not_active Expired - Lifetime
- 2011-10-07 EP EP21167754.7A patent/EP3865734A1/en active Pending
- 2011-10-07 EP EP19188742.1A patent/EP3594532B1/en active Active
- 2011-10-07 EP EP11830282.7A patent/EP2625441B1/en active Active
- 2011-10-07 CN CN201180057084.7A patent/CN103228951B/zh active Active
- 2011-10-07 WO PCT/IB2011/054431 patent/WO2012046216A2/en active Application Filing
- 2011-10-07 CN CN201610101107.4A patent/CN105650215B/zh active Active
- 2011-10-07 AU AU2011311151A patent/AU2011311151B2/en not_active Expired - Fee Related
-
2013
- 2013-04-05 US US13/857,277 patent/US9140342B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN105650215A (zh) | 2016-06-08 |
| EP2625441B1 (en) | 2019-09-11 |
| CN103228951B (zh) | 2016-03-23 |
| DE202011110841U1 (de) | 2016-11-03 |
| US20130276575A1 (en) | 2013-10-24 |
| CN103228951A (zh) | 2013-07-31 |
| US9140342B2 (en) | 2015-09-22 |
| EP3594532A1 (en) | 2020-01-15 |
| EP3865734A1 (en) | 2021-08-18 |
| AU2011311151B2 (en) | 2015-07-02 |
| WO2012046216A2 (en) | 2012-04-12 |
| WO2012046216A3 (en) | 2012-08-02 |
| CN105650215B (zh) | 2018-06-12 |
| EP3594532B1 (en) | 2021-05-19 |
| AU2011311151A1 (en) | 2013-04-18 |
| EP2625441A2 (en) | 2013-08-14 |
| JP2013539848A (ja) | 2013-10-28 |
| EP2625441A4 (en) | 2018-04-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5899223B2 (ja) | ギヤ、モータ−ギヤユニット、エンジン−ギヤユニット、車両、ギヤを備えた発電機 | |
| JP6567632B2 (ja) | ギヤ、モータ−ギヤユニット、内燃エンジン−ギヤユニット、車両、及びギヤを備えた発電機 | |
| JP2015537158A (ja) | スプリットリングギヤ遊星カム位相器 | |
| US11280394B2 (en) | Gear, motor-gear unit, vehicle, generator with a gear, and force transmitting element |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20140724 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140821 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141007 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141007 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150828 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150902 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151201 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160307 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5899223 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |