以下の詳細な説明では、いくつかの実施形態の完全な理解を提供するために、多くの具体的な詳細が述べられている。しかしながら、当業者であれば、これらの具体的な詳細なしでいくつかの実施形態を実施できることを理解するであろう。他の例では、周知の方法、手順、構成要素、ユニットおよび/または回路は、議論を不明瞭にしないように詳細には記載されていない。
以下の詳細な説明のいくつかの部分は、コンピュータメモリ内のデータビットまたはバイナリデジタル信号に対する演算のアルゴリズムおよび記号表現に関して提示される。これらのアルゴリズムの説明および表現は、データ処理技術の当業者が彼らの仕事の内容を他の当業者に伝えるために使用する技術とすることができる。
アルゴリズムは、ここでは、一般的に、所望の結果を導く行動または動作の自己一貫したシーケンスとみなされる。これには、物理量の物理的加工が含まれる。通常、必ずしも必要ではないが、これらの量は、格納、転送、結合、比較、および他の方法で動作できる電気または磁気信号の形態をとらえる。これらの信号をビット、値、要素、記号、文字、用語、数字などと称することは、主に一般的な使用のために、時には便利であることが判明している。しかしながら、これらの用語および類似の用語はすべて、適切な物理量と関連付けられており、これらの量に適用される便利なラベルに過ぎないことを理解されたい。
例えば、「処理する」、「コンピューティングする(computing)」、「演算する」、「決定する」、「確立する」、「分析する」、「確認する」などの用語を利用する本明細書の議論は、コンピュータのレジスタおよび/またはメモリ内の物理量(例えば、電子)として表されるデータを、コンピュータのレジスタおよび/またはメモリまたは動作および/またはプロセスを遂行する命令を格納することができる他の情報格納媒体内で物理量として同様に表される他のデータに、動作および/または変換するコンピュータ、コンピューティングプラットフォーム、コンピューティングシステム、または他の電子コンピューティング装置の動作(複数含む)および/またはプロセスを参照することができる。
本明細書で使用する「複数(plurality)」および「複数(a plurality)」という用語は、例えば、「複数」または「2つ以上」を含む。例えば、「複数のアイテム」は、2つ以上のアイテムを含む。
「一実施形態」、「実施形態」、「例示的な実施形態」、「様々な実施形態」などの言及は、そのように記載された実施形態が、特定の形体、構造、または特性を含むことができるが、すべての実施形態が、特定の形体、構造、または特性を必ず含まない。さらに、「一実施形態では」という語句を繰り返し使用することは、同一の実施形態を指しているかもしれないが、必ずしも指すとは限らない。
本明細書で使用されるように、他に特定されない限り、共通物体を記述するための序数形「第1」、「第2」、「第3」などの使用は、単に類似物体の異なる例が参照されたことを示し、そのように記述された物体が、時間的、空間的、順位付け、または任意の他の形態のいずれかの所与の順序でなければならないこと意味することを意図しない。
いくつかの実施形態は、例えば、完全にハードウェアの実施形態、完全にソフトウェアの実施形態、またはハードウェアおよびソフトウェアの両方の要素を含む実施形態の形態を取り込むことができる。いくつかの実施形態は、ファームウェア、常駐ソフトウェア、マイクロコードなどを含むが、これに限定されないソフトウェアで実行することができる。
さらに、いくつかの実施形態は、コンピュータまたは任意の命令実行システムによってまたはそれらと共に使用するためのプログラムコードを提供するコンピュータ使用可能またはコンピュータ可読媒体からアクセス可能なコンピュータプログラム製品の形態を取り込むことができる。例えば、コンピュータ使用可能またはコンピュータ可読媒体は、命令実行システム、機器、または装置によってまたはそれらと共に使用するためのプログラムを含む、格納する、通信する、伝播する、または転送することができる任意の機器であり得るかまたはそれらを含むことができる。
いくつかの例示的な実施形態では、媒体は、電子、磁気、光学、電磁気、赤外線、または半導体システム(または機器または装置)または伝搬媒体とすることができる。コンピュータ可読媒体のいくつかの例示的な例には、半導体または固体メモリ、磁気テープ、取り外し可能コンピュータディスケット、ランダムアクセスメモリ(RAM:random access memory)、読み出し専用メモリ(ROM:read‐only memory)、フラッシュメモリ、剛性磁気ディスク、および光ディスクを含むことができる。光ディスクのいくつかの例示的な例には、コンパクトディスク−リードオンリメモリ(CD−ROM:compact disc read‐only memory)、コンパクトディスク読み込み/書込み(CD−R/W:Compact Disc Rewritable)、およびDVDが含まれる。
いくつか例示的な実施形態では、プログラムコードを格納および/または実行するために好適なデータ処理システムは、例えば、システムバスを介してメモリ要素に直接的または間接的に結合された少なくとも1つのプロセッサを含むことができる。メモリ要素は、例えば、プログラムコードの実際の実行中に使用されるローカルメモリ、大容量ストレージ、および実行中の大容量ストレージからコードを取り出さなければならない回数を減らすために少なくともいくつかのプログラムコードの一時格納を提供することができるキャッシュメモリを含むことができる。
いくつかの例示的な実施形態では、入出力またはI/O(input/output)装置(キーボード、ディスプレイ、ポインティング装置などを含むが、これに限定されない)を、直接的にまたは介在するI/Oコントローラを介してのいずれかでシステムに結合することができる。いくつかの例示的な実施形態では、ネットワークアダプタを、システムに結合して、例えば、介在するプライベートネットワークまたはパブリックネットワークを介して、データ処理システムを他のデータ処理システムまたは遠隔プリンタまたは格納装置に結合するようにさせることができる。いくつかの例示的な実施形態では、モデム、ケーブルモデム、およびイーサネットカードは、ネットワークアダプタのタイプの実例である。他の好適な構成要素を使用することができる。
いくつかの実施形態は、1つ以上の有線または無線リンクを含むことができ、無線通信の1つ以上の構成要素を利用することができ、無線通信の1つ以上の方法またはプロトコルなどを利用することができる。いくつかの実施形態は、有線通信および/または無線通信を利用することができる。
いくつかの実施形態は、例えば、携帯電話、スマートフォン、モバイルコンピュータ、ラップトップコンピュータ、ノートブックコンピュータ、タブレットコンピュータ、ハンドヘルドコンピュータ、ハンドヘルド装置、パーソナルデジタルアシスタント(PDA:Personal Digital Assistant)装置、ハンドヘルドPDA装置、モバイルまたはポータブル装置、非モバイルまたは非ポータブル装置、セルラフォン、無線電話、1つ以上の内部アンテナおよび/または外部アンテナを有する装置、無線ハンドヘルド装置などの様々な装置およびシステムと組み合わせて使用することができる。
ここで、いくつかの例示的な実施形態による、システム100のブロック図を概略的に示す図1を参照する。
図1に示すように、いくつかの例示的な実施形態では、システム100は、装置102を含むことができる。
いくつかの例示的な実施形態では、装置102を、好適なハードウェア構成要素および/またはソフトウェア構成要素、例えば、プロセッサ、コントローラ、メモリユニット、格納ユニット、入力ユニット、出力ユニット、通信ユニット、オペレーティングシステム、アプリケーションなどを使用して実装することができる。
いくつかの例示的な実施形態では、装置102は、例えば、コンピューティング装置、携帯電話、スマートフォン、セルラフォン、ノートブック、モバイルコンピュータ、ラップトップコンピュータ、ノートブックコンピュータ、タブレットコンピュータ、ハンドヘルドコンピュータ、ハンドヘルド装置、PDA装置、ハンドヘルドPDA装置、無線通信装置、無線通信装置を組み込んだPDA装置などを含むことができる。
いくつかの例示的な実施形態では、装置102は、例えば、プロセッサ191、入力ユニット192、出力ユニット193、メモリユニット194、および/または格納ユニット195のうちの1つ以上を含むことができる。装置102は、他の好適なハードウェア構成要素および/またはソフトウェア構成要素を任意に含むことができる。いくつかの例示的な実施形態では、装置102の1つ以上の構成要素のいくつかまたはすべてを共通のハウジングまたはパッケージに封入することができ、1つ以上の有線または無線リンクを使用して相互接続または動作可能に関連付けることができる。他の実施形態では、装置102の1つ以上の構成要素を、複数のまたは別個の装置に分散することができる。
いくつかの例示的な実施形態では、プロセッサ191は、例えば、中央処理装置(CPU:central processing unit)、デジタル信号プロセッサ(DSP:digital signal processor)、1つ以上のプロセッサコア、シングルコアプロセッサ、デュアルコアプロセッサ、マルチコアプロセッサ、マイクロプロセッサ、ホストプロセッサ、コントローラ、複数のプロセッサもしくはコントローラ、チップ、マイクロチップ、1つ以上の回路、回路素子、ロジックユニット、集積回路(IC:integrated circuit)、特定用途向けIC(ASIC:application specific integrated circuit)、または任意の他の好適な多目的もしくは特定のプロセッサもしくはコントローラを含むことができる。プロセッサ191は、例えば、装置102のオペレーティングシステム(OS:operating system)および/または1つ以上の好適なアプリケーションの命令を実行することができる。
いくつかの例示的な実施形態では、入力ユニット192は、例えば、キーボード、キーパッド、マウス、タッチスクリーン、タッチパッド、トラックボール、スタイラス、マイクロフォン、または他の好適なポインティング装置もしくは入力装置を含んでもよい。出力ユニット193は、例えば、モニタ、スクリーン、タッチスクリーン、フラットパネルディスプレイ、発光ダイオード(LED:light‐emitting diode)ディスプレイユニット、液晶ディスプレイ(LCD:liquid crystal display)ディスプレイユニット、プラズマディスプレイユニット、1つ以上のオーディオスピーカもしくはイヤホン、または他の好適な出力装置を含むことができる。
いくつかの例示的な実施形態では、メモリユニット194は、例えば、ランダムアクセスメモリ(RAM:random acces memory)、リードオンリメモリ(ROM:read−only memory)、ダイナミックRAM(DRAM:dynamic random access memory)、同期DRAM(SD−RAM:synchronous dynamic random access memory)、フラッシュメモリ、揮発性メモリ、不揮発性メモリ、キャッシュメモリ、バッファ、短期メモリユニット、長期メモリユニット、または他の好適なメモリユニットを含む。格納ユニット195は、例えば、ハードディスクドライブ、フロッピーディスクドライブ、コンパクトディスク(CD:compact disc)ドライブ、CD−ROMドライブ、DVD(digital versatile disc)ドライブ、または他の好適なリムーバブルもしくは非リムーバブル格納ユニットを含んでもよい。例えば、メモリユニット194および/または格納ユニット195は、装置102によって処理されたデータを格納することができる。
いくつかの例示的な実施形態では、装置102は、無線および/または有線のネットワーク103を介して1つ以上の他の装置と通信するように構成することができる。
いくつかの例示的な実施形態では、ネットワーク103は、有線ネットワーク、ローカルエリアネットワーク(LAN:local area network)、無線LAN(WLAN:Wireless Local Area Network)ネットワーク、ラジオネットワーク、セルラネットワーク、無線フィデリティ(WiFi:Wireless Fidelity)ネットワーク、IRネットワーク、Bluetooth(登録商標)(BT)ネットワークなどを含むことができる。
いくつかの例示的な実施形態では、装置102は、例えば、本明細書で記載するように、1人以上のユーザが装置102の1つ以上のプロセス、アプリケーションおよび/またはモジュールと対話できるようにすることができる。
いくつかの例示的な実施形態では、装置102は、1つ以上の動作、モジュール、プロセス、手順などを遂行および/または実行するように構成することができる。
いくつかの例示的な実施形態では、装置102は、例えば、後記するように、例えば、装置102のユーザによって提供される眼鏡のレンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、システム100は、例えば、後記するような、例えば、補助光学手段を全く使用しなくても、眼鏡のレンズのレンズメータまたはレンズメータ分析を遂行するように構成することができる。
いくつかの例示的な実施形態では、レンズの1つ以上の光学パラメータは、レンズの球面度数、円柱度数および/または円柱軸を含むことができる。
いくつかの例示的な実施形態では、システム100は、例えば、後記するように、球面レンズの焦点屈折力、円柱レンズの焦点屈折力および軸、ならびに/または眼鏡のフレームに組み立てられた2つのレンズの中心間の距離を分析するように構成することができる。
いくつかの例示的な実施形態では、システム100は、例えば、後記するように、装置102のユーザによって提供されるレンズの1つ以上の光学パラメータを決定するように構成された少なくとも1つのサービス、モジュール、コントローラ、および/またはアプリケーション160を含むことができる。
いくつかの例示的な実施形態では、アプリケーション160は、ソフトウェア、ソフトウェアモジュール、アプリケーション、プログラム、サブルーチン、命令、命令セット、コンピューティングコード、ワード、値、シンボルなどを含むことができ、またはそれらとして実装されてもよい。
いくつかの例示的な実施形態では、アプリケーション160は、装置102によって実行されるローカルアプリケーションを含むことができる。例えば、メモリユニット194および/または格納ユニット195は、アプリケーション160をもたらす命令を格納することができ、および/またはプロセッサ191は、例えば、後記するように、アプリケーション160をもたらす命令を実行するように構成することができる。
他の実施形態では、アプリケーション160は、任意の好適なコンピューティングシステム、例えばサーバ170によって実行される遠隔アプリケーションを含むことができる。
いくつかの例示的な実施形態では、サーバ170は、少なくとも遠隔サーバ、ウェブベースのサーバ、クラウドサーバ、および/または他の任意のサーバを含むことができる。
いくつかの例示的な実施形態では、サーバ170は、アプリケーション160をもたらす命令を格納した好適なメモリおよび/または格納ユニット174、および例えば、後記するような命令を実行するための好適なプロセッサ171を含むことができる。
いくつかの例示的な実施形態では、アプリケーション160は、遠隔アプリケーションとローカルアプリケーションとの組み合わせを含むことができる。
一例では、アプリケーション160は、アプリケーション160を、装置102のユーザによってローカルに実行することができるように、他のコンピューティングシステム、例えば、サーバ170から装置102のユーザによってダウンロードおよび/または受信され得る。例えば、命令は、例えば、装置102のプロセッサ191によって実行される前に、例えば、装置102のメモリまたは任意の好適な短期間メモリもしくはバッファに一時的に受信されて格納することができる。
別の例では、アプリケーション160は、装置102によってローカルに実行されるフロントエンドと、サーバ170によって実行されるバックエンドとを含むことができる。例えば、ユーザのレンズの1つ以上の光学パラメータを決定する1つ以上の第1の動作は、例えば、装置102によって、ローカルに、および/または1つ以上の光学パラメータを決定する1つ以上の第2の動作は、例えば、後記するように、例えば、サーバ170によって、遠隔的に遂行することができる。
他の実施形態では、アプリケーション160は、任意の他の好適なコンピューティング機器および/またはスキームを含むことができる。
いくつかの例示的な実施形態では、システム100は、装置102のユーザとシステム100の1つ以上の要素、例えば、アプリケーション160との間をインターフェースするためのインターフェース110を含むことができる。
いくつかの例示的な実施形態では、インターフェース110は、任意の好適なハードウェア構成要素および/またはソフトウェア構成要素、例えば、プロセッサ、コントローラ、メモリユニット、格納ユニット、入力ユニット、出力ユニット、通信ユニット、オペレーティングシステム、および/またはアプリケーションを使用して実装することができる。
いくつかの実施形態では、インターフェース110は、システム100の任意の好適なモジュール、システム、装置、または構成要素の一部として実装することができる。
他の実施形態では、インターフェース110は、システム100の別個の要素として実装することができる。
いくつかの例示的な実施形態では、インターフェース110を、装置102の一部として実装することができる。例えば、インターフェース110は、装置102の一部として、関連付けられてもよく、および/または含むことができる。
一例では、インターフェース110は、例えば、ミドルウェアとして、および/または装置102の任意の好適なアプリケーションの一部として実装され得る。例えば、インターフェース110は、アプリケーション160の一部として、および/または装置102のOSの一部として実装することができる。
いくつかの例示的な実施形態では、インターフェース160を、サーバ170の一部として実装することができる。例えば、インターフェース110を、サーバ170の一部として、関連付けられてもよく、および/または含むことができる。
一例では、インターフェース110は、ウェブベースのアプリケーション、ウェブサイト、ウェブページ、プラグイン、ActiveXコントロール、リッチコンテンツ構成要素(例えば、FlashまたはShockwave構成要素)などを含むことができ、また一部であり得る。
いくつかの例示的な実施形態では、インターフェース110を、例えば、システム100の要素間および/または1つ以上の他の、例えば、内部または外部の当事者、ユーザ、アプリケーションおよび/またはシステムに、情報および/または通信を通信するために、例えば、ゲートウェイ(GW:gateway)112および/またはアプリケーションプログラミングインタフェース(API:application programming interface)114に関連付けてもよく、および/または含むことができる。
いくつかの実施形態では、インターフェース110は、任意の好適なグラフィックユーザインタフェース(GUI:Graphic−User−Interface)116および/または他の好適なインターフェースを含むことができる。
いくつかの例示的な実施形態では、システム100は、画像取り込み装置によって取り込まれた1つ以上の物体を表示するようにおよび/または後記するように、情報、物体、命令および/または他のコンテンツを、例えば、ユーザに、表示するように構成されたディスプレイ130を含むことができる。
いくつかの例示的な実施形態では、ディスプレイ130は、別個のディスプレイ、スタンドアロンディスプレイ、および/または例えば、システム100の他の要素とは別個のディスプレイ装置を含むことができる。
いくつかの例示的な実施形態では、ディスプレイ130は、装置102の一部またはサーバ170の一部とすることができる。
いくつかの例示的な実施形態では、ディスプレイ130は、他のコンピューティングシステム、例えば、ラップトップ、デスクトップなどの一部とすることができる。
いくつかの例示的な実施形態では、ディスプレイ130は、例えば、モニタ、画面、接触式画面、フラットパネルディスプレイ、LEDディスプレイユニット、LCDディスプレイユニット、プラズマディスプレイユニット、1つ以上のオーディオスピーカ、イヤホン、および/または任意の他の好適な構成要素を含むことができる。
いくつかの例示的な実施形態では、インターフェース110のGUI116をディスプレイ130に表示することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、後記されるように、例えば、物体の少なくとも1つの取り込み画像に基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、物体は、例えば、後記するように、1つ以上の既知の寸法を有する物体を含むことができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、後記するように、例えば、物体の寸法に基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、物体は、例えば、後記するように、円対称または回転対称物体を含むことができる。
いくつかの例示的な実施形態では、物体はディスプレイ130上に表示することができる。
他の実施形態では、物体は、ディスプレイ130上に表示されない物体を含むことができ、例えば、物体は、例えば、後記するように、例えば、装置102が、物体の画像を取り込むことができるように、配置、提示、および/または位置決めされ得る物理的物体を含むことができる。
いくつかの例示的な実施形態では、アプリケーション160は、ディスプレイ130に物体を表示させるように制御し、引き起こし、トリガし、および/または指示するようにディスプレイ構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、後記するように、ディスプレイ130上の物体の表示サイズを較正するように構成することができる。
いくつかの例示的な実施形態では、取り込まれる画像は、ユーザによって取り込まれてもよく、例えば、後記するように、物体を含むことができる。
いくつかの例示的な実施形態では、物体の取り込まれる画像は、眼鏡のレンズを介して取り込むことができる。
いくつかの例示的な実施形態では、装置102は、少なくとも1つの画像を取り込むように構成された画像取り込み装置、例えば、カメラ118または任意の他の装置を含むことができる。
いくつかの例示的な実施形態では、アプリケーション160は、カメラ118が物体を含む少なくとも1つの画像を取り込むように制御し、引き起こし、トリガし、および/または指示するよう構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、眼鏡のレンズを介して、物体の少なくとも1つの画像を取り込むようにユーザに指示するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、レンズの中心を介して、またはレンズの他の部分を介して、カメラ118を制御し、引き起こし、トリガし、および/または指示して、少なくとも1つの画像を取り込むように構成することができる。
いくつかの例示的な実施形態では、例えば、レンズを介してカメラ118によって見ることができるような物体の画像は、例えば、例えば後記されるように、例えば、レンズが球面レンズおよび/または円柱レンズを含む場合、拡大および/または変形することができる。
いくつかの例示的な実施形態では、画像の倍率および/または変形は、例えば、レンズの球面度数、円柱軸および/または円柱度数に応じて変化し得る。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、後記するように、レンズを介して取り込まれた画像の倍率および/または変形に基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、カメラ118から直接的または間接的に、眼鏡のレンズを介して取り込まれた物体の少なくとも1つの画像を受け取るように構成することができる。
一例では、アプリケーション160は、例えば、アプリケーション160が装置102によってローカルに実装されている場合に、レンズの1つ以上の光学パラメータをローカルに決定するように構成することができる。この例によれば、カメラ118は、画像を取り込むように構成されてもよく、アプリケーション160は、例えば、カメラ118から取り込まれた画像を受信し、例えば、後記するように、レンズの1つ以上の光学パラメータを決定するように構成することができる。
別の例では、アプリケーション160は、例えば、アプリケーション160がサーバ170によって実装される場合、または例えば、アプリケーション160のフロントエンドが装置102によって実装されている間に、アプリケーション160のバックエンドがサーバ170によって実装される場合に、レンズの1つ以上の光学パラメータを遠隔的に決定するように構成することができる。この例によれば、カメラ118を、画像を取り込むように構成することができ、アプリケーション160のフロントエンドを、取り込まれた画像を受信するように構成することができ、サーバ170および/またはアプリケーション160のバックエンドを、例えば、アプリケーション160のフロントエンドから受信した情報に基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
一例では、装置102および/またはアプリケーション160のフロントエンドを、取り込まれた画像、および任意選択で、例えば、後記するような追加情報を、例えばネットワーク103を介してサーバ170に送信するように構成することができ、および/またはサーバ170および/またはアプリケーション160のバックエンドを、取り込まれた画像を受信し、例えば、装置102から取り込まれた画像に基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、レンズを介して取り込まれた画像内の物体の少なくとも1つの画像化された寸法と、例えば、後記するように、物体の少なくとも1つのそれぞれの基準寸法との間の倍率に基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、画像がレンズを介して取り込まれるときの、物体とカメラ118との間の第1の距離(「カメラ距離」)と、画像がレンズを介して取り込まれるときの、物体と眼鏡のレンズ(「眼鏡レンズ」)との間の第2の距離(「レンズ距離」)とに基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、後記するように、例えば、倍率に基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
例示的な実施形態は、アプリケーション160は、例えば、後記するように、例えば、第1および第2の距離に基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、レンズ距離を、例えば、後記するように、カメラ距離の半分であるように、設定、測定、近似、および/または仮定されるようすることができる。
他の実施形態では、例えば、後記するように、第1の距離と第2の距離との間の他の関係は、設定、測定、近似および/または仮定されることができる。
他の実施形態では、第1の距離および/または第2の距離を、1つ以上の測定値に基づいて、および/または後記するように、レンズを介して取り込まれた1つ以上の画像に基づいて、設定および/または規定することができる。
いくつかの例示的な実施形態による、測定スキーム200を概略的に示す図2を参照する。一例では、図1の1つ以上の要素を、測定スキーム200に従って配置および/または動作することができ、1つ以上のパラメータを、測定スキーム200に基づいて、アプリケーション160(図1)によって決定することができ、および/または、例えば、後記するように、測定スキーム200に従って図1の1つ以上の要素によって1つ以上の測定を遂行することができる。
図2に示すように、測定スキーム200は、物体を表示するディスプレイ230、眼鏡レンズ210(「レンズ」)、カメラ218のレンズ228(「カメラレンズ」)、および/またはカメラ218のセンサ229(「カメラセンサ」)を含むことができる。例えば、ディスプレイ230は、ディスプレイ130(図1)の機能を遂行することができ、および/またはカメラ218は、カメラ118(図1)の機能を遂行することができる。
図2に示すように、Lで示されるカメラ距離は、ディスプレイ230とカメラ218、例えば、カメラレンズ228との間にあり得、uで示されるレンズ距離は、眼鏡レンズ210とディスプレイ230との間にあり得、および/またはνで示される第3の距離は、カメラレンズ228とカメラセンサ229との間にあり得る。
図2に示すように、レンズ210は、f1で示される焦点距離を有することができ、および/またはカメラレンズ228はf2で示される焦点距離を有することができる。
いくつかの例示的な実施形態では、例えば、レンズ210が負のレンズを含む場合、以下の式が適用され得る。
いくつかの例示的な実施形態では、例えば、レンズ210が負のレンズを含む場合、例えば後記するように、f1の正の値を使用することができる。
いくつかの例示的な実施形態では、例えば、レンズ210が正のレンズを含む場合、f1の負の値、例えば、−f1を使用することができる。
いくつかの例示的な実施形態では、測定スキーム200に従って、1つ以上の関係を、例えば、以下のように適用することができる。
いくつかの例示的な実施形態では、センサ229は、例えば、以下のように、u’で示される新しい位置でディスプレイ230上の物体を感知することができる。
いくつかの例示的な実施形態では、カメラレンズ228のM2で示される倍率を、例えば、以下のように決定することができる。
いくつかの例示的な実施形態では、測定スキーム200に従って、MTで示される全倍率を、例えば、以下のように決定することができる。
ここで、M1はレンズ210の倍率を示す。
いくつかの例示的な実施形態では、位置u=0における、M0で示される倍率を、例えば、以下のようにすることができる。
いくつかの例示的な実施形態では、倍率M0を、レンズ210がない場合の倍率に等しくすることができる。
いくつかの例示的な実施形態では、MRで示される相対倍率を、例えば、以下のように決定することができる。
いくつかの例示的な実施形態では、最大倍率の測定スキーム200は、相対倍率MRが例えば、以下のような1つ以上の条件を満たす位置で発生することができる。
他の実施形態では、最大倍率は、例えば、少なくとも以下の基準を満たす、uidealと示される位置で発生することができる。
いくつかの例示的な実施形態では、L>>f2であるので、最大倍率の最良の位置を、例えば、概略、ディスプレイ230とカメラレンズ228との間の中間とすることができる。
いくつかの例示的な実施形態では、例えば、ディスプレイ230とカメラレンズ228との間の中間の位置uidealなどの相対的な倍率MRを、例えば、以下のように、決定することができる。
いくつかの例示的な実施形態では、レンズ210の球面度数を、例えば、好ましくは、uidealピークの位置で、または任意の他の点で、例えば、相対倍率MRを測定することによって、所与のカメラ距離Lに対して抽出することができる。
いくつかの例示的な実施形態では、レンズ210が円柱を有する場合、例えば、式9による相対的な倍率公式を、円柱軸の各々に別々に適用することができる。
いくつかの例示的な実施形態では、ディスプレイ230とレンズ210との間の距離Uを、例えば、倍率公式を使用して、例えば、式9に従って決定することができる。
いくつかの例示的な実施形態では、最大倍率がディスプレイ230とレンズ228との中間に与えられるので、レンズ210がディスプレイ230とカメラレンズ228との間の異なる距離に位置する場合、複数の画像の取り込むステップが、例えば、フィッティング、外挿もしくはサンプリングによって、および/またはディスプレイ230からのカメラの既知の/計算された/測定されたカメラ距離Lによって、最大倍率を評価するステップを可能にすることができる。
いくつかの例示的な実施形態では、レンズ210の焦点距離f1を、例えば、以下のように、例えば、全倍率MTおよび/または相対倍率MRに基づいて、決定することができる。
いくつかの例示的な実施形態では、カメラ218の焦点を、例えば、ディスプレイ230とカメラの距離上に固定することができる。
いくつかの例示的な実施形態では、カメラ218は、ディスプレイ230上に焦点を合わせて、例えば、カメラ218の前にレンズ210を挿入する前に焦点をロックすることができる。
他の実施形態では、ディスプレイ230に焦点を合わせるステップを、例えば、ディスプレイ230とカメラ218との間にレンズ210を配置した後に、例えば、カメラ218の視野(FOV:field of view)内で、例えば、レンズ210を含む眼鏡のフレームを含まない、ディスプレイ230上の部品に焦点を合わせるステップによって、遂行することができる。例えば、画像処理技術を実装して、カメラ218がオートフォーカス(AF:autofocus)を行うべき場所をFOV内で決定することができる。
別の実施形態では、AFを遂行するカメラ218のFOV内の領域を、例えば、カメラが焦点を合わせることができるカメラ218のFOV内の領域を選択するようにユーザに指示することによって手動で選択することができる。
いくつかの例示的な実施形態では、レンズ210の焦点屈折力の倍率および抽出を、例えば、ディスプレイ230にのみ焦点を合わせることによって決定することができる。
いくつかの例示的な実施形態では、カメラ218は、例えば、以下のように、例えば、レンズ210なしで、ディスプレイ230上の物体を使用して焦点を合わせることができる。
いくつかの例示的な実施形態では、レンズ210は、例えば、以下のように、カメラレンズから距離u’に位置する仮想物体を形成することができる。
いくつかの例示的な実施形態では、システム内の全倍率MTを、例えば、以下のように決定することができる。
いくつかの例示的な実施形態では、レンズ210の焦点距離f1は、例えば、以下のように決定することができる。
いくつかの例示的な実施形態では、レンズ210のP1で示される度数を、例えば、以下のように決定することができる。
ディスプレイ330上に表示される物体302の画像300を概略的に示す図3を参照する。例えば、ディスプレイ330は、ディスプレイ130(図1)の機能を遂行することができる。
いくつかの例示的な実施形態では、図3に示すように、物体302は、円を含むことができる。
いくつかの例示的な実施形態では、物体302の画像300を、レンズ310を介してカメラによって取り込むことができる。例えば、カメラ118(図1)および/またはカメラ218(図2)は、レンズ310、例えば、レンズ210(図2)を介して物体302を取り込むことができる。
図3に示すように、物体302の画像300がレンズ310を通って取り込まれたとき、レンズ310は、物体302の倍率を、例えば、様々な角度で異なる手法で変更することができる。
図3に示すように、物体302の画像が、レンズ310を通って取り込まれたとき、画像300を、楕円体として見ることができる。
いくつかの例示的な実施形態では、カメラは、レンズ310の視野の外側に配置され得る較正物体301に焦点を合わせることができる。
いくつかの例示的な実施形態では、図3に示すように、レンズ310は、例えば、較正物体301が、レンズ310のFOVの外側に配置されているため、較正物体301の画像に影響を与えない可能性がある。
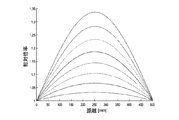
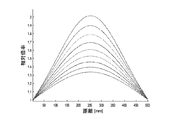
いくつかの例示的な実施形態による、4つのそれぞれの相対的な倍率グラフを概略的に示す、図4A、4Bおよび4Cおよび4Dを参照する。
一例では、例えば、カメラ218(図2)とディスプレイ230(図2)との間などのカメラ距離Lは50cmに等しく、例えば、レンズ228(図2)の焦点距離f2は、3.7mmに等しくすることができる。他の実施形態では、任意の他の距離を使用することができる。
いくつかの例示的な実施形態では、図4A、図4B、および図4Cおよび4Dの4つのグラフは、カメラセンサ、例えば、センサ229(図2)からのレンズ、例えば、レンズ210(図2)の距離の関数としての相対倍率を示す。
いくつかの例示的な実施形態では、図4A、図4B、および図4Cおよび図4Dのグラフは、複数の異なるレンズに対応する複数の倍率曲線を示す。
いくつかの例示的な実施形態では、複数の異なるレンズは、ある範囲のジオプタ内の複数のジオプタ間隔に対応することができる。
例えば、倍率曲線は、カメラからのレンズの距離の関数として、ある範囲のジオプタからの特定のジオプタを有するレンズの倍率を表すことができる。
いくつかの例示的な実施形態では、図4Aの複数の倍率曲線は、0.25ジオプタ間隔で0.25Dと2Dとの間のレンズ度数を有する複数のレンズに対応することができる。
いくつかの例示的な実施形態では、図4Bの複数の倍率曲線は、0.25ジオプタ間隔で2Dと4Dとの間のレンズ度数を有する複数のレンズに対応することができる。
いくつかの例示的な実施形態では、図4Cの複数の倍率曲線は、0.25ジオプタ間隔で−0.25Dと−2Dとの間のレンズ度数を有する複数のレンズに対応することができる。
いくつかの例示的な実施形態では、図4Dの複数の倍率曲線は、0.25ジオプタ間隔で−2Dと−4Dとの間のレンズ度数を有する複数のレンズに対応することができる。
他の実施形態では、任意の他のジオプタ範囲および/または任意の他のジオプタ間隔に関して任意の他の曲線を使用することができる。
一例では、レンズは、−4ジオプタのレンズ度数を有することができる。この例によれば、レンズは1.5の最大相対倍率を有することが予想される。
別の例では、レンズは、+0.25Dの円柱度数で−4Dのレンズ度数を有することができる。この例によれば、レンズは、第1の軸で1.5の最大相対倍率を有し、第2の軸では1.47の相対倍率を有することが予想される。
図4A、図4B、および図4Cおよび図4Dに示すように、0.25ジオプタのレンズで倍率の数パーセントの変化が予想される。
一例では、ディスプレイ230(図3)上の1センチメートルのサイズの物体は、カメラセンサ上の数百の画素を占める場合がある。したがって、物体のサイズの数パーセントの変化は、追跡可能な数画素の変化をもたらす可能性がある。
図1に戻って参照すると、いくつかの例示的な実施形態では、例えば、後記されるように、レンズの1つ以上の光学パラメータを測定するために、1つ以上の手順、動作および/または方法を遂行することができる。
いくつかの例示的な実施形態では、1つ以上の動作は、カメラ118とディスプレイ180との間に眼鏡のレンズを配置するステップを含むことができる。
いくつかの例示的な実施形態では、レンズの度数、レンズの円柱度数、レンズ円柱角度、および/または眼鏡レンズの任意の他のパラメータとしてのパラメータは、例えば、レンズを介してカメラ118によって取り込まれた画像の変化を追跡することによって決定することができる。
いくつかの例示的な実施形態では、レンズの1つ以上の光学パラメータを決定するステップは、例えば、ディスプレイ130に表示される物体などとカメラ118との間のカメラ距離、例えば、物体とレンズとの間のレンズ距離、および/または、例えば、後記するように、画像の検出された変化、に基づくことができる。
いくつかの例示的な実施形態では、アプリケーション160は、1つ以上の動作を利用して、例えば、後記するように、ディスプレイ130に表示される物体の、画像化された寸法と、物体のそれぞれの基準寸法との間の倍率に、例えば、基づいて、レンズの1つ以上の光学パラメータを決定することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、後記するように、倍率に基づいて、レンズの球面度数を決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、後記するように、画像化された寸法と、基準寸法との間の倍率が最大である、例えば、画像内の複数の軸の最大の倍率軸に基づいて、レンズの円柱軸を決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、後記するように、物体の他の画像化された寸法と別のそれぞれの基準寸法との間の倍率が最小である、例えば、画像内の複数の軸の最大倍率軸と最小倍率軸とに基づいて、レンズの円柱度数を決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、後記するように、例えば、最小倍率軸における第1の倍率および最大倍率軸における第2の倍率に基づいて、レンズの円柱度数を決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、後記するような複数の倍率画像から選択され得る、最大または最小倍率画像などの極値倍率画像に、例えば、基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、複数の画像の極値倍率画像は、画像化された寸法と基準寸法との間の倍率が最大または最小である画像を含むことができる。
いくつかの例示的な実施形態では、アプリケーション160は、レンズ距離を一定にして、レンズを介して取り込まれた物体の複数の画像を、例えば、カメラと物体の間のそれぞれの複数のカメラ距離で処理するように構成することができる。例えば、アプリケーション160は、眼鏡がディスプレイ130に対して静止したままである間に、カメラ118をディスプレイ130から後方におよび/または前方に移動させるように眼鏡のユーザに指示するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、画像化された寸法と基準寸法との間の極値倍率を有し得る複数の画像の極値倍率画像を決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、後記されるような極値倍率画像に、例えば、基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、カメラ距離を一定にして、レンズを介して取り込まれた物体の複数の画像を、例えば、レンズと物体との間のそれぞれの複数のレンズ距離で処理するように構成することができる。例えば、アプリケーション160は、カメラ118がディスプレイ130に対して静止したままである間に、眼鏡をカメラ118とディスプレイ130との間で後方および/または前方に動かすように眼鏡ユーザに指示するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、画像化された寸法と基準寸法との間にnの極値倍率を提供する、複数の画像の極値倍率画像を決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160は、例えば、後記されるような、例えば、極値倍率画像に基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160を、例えば、倍率と、既知の寸法を有する較正物体、例えば、較正物体301(図3)の画像における少なくとも1つの寸法の別の倍率とに基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、例えば、図3を参照して上記したように、較正物体の画像を、レンズを介さずに取り込むことができる。
いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記するように、1つ以上の距離測定値、推定値、および/または計算値に基づいて、例えば、物体とカメラ118との間の第1の距離、および/または、例えば、物体とレンズとの間の第2の距離を決定するように構成することができる。
いくつかの例示的な実施形態では、第1の距離および/または第2の距離を、例えば、後記されるように、事前に定義することができる。
いくつかの例示的な実施形態では、第2の距離を、眼鏡のテンプルアームが物体の平面に延ばされるとき、物体とレンズとの間の距離を含むように設定することができる。
いくつかの例示的な実施形態では、アプリケーション160を、例えば、1つ以上の画像がカメラ118によって取り込まれたとき、例えば、カメラ118および/または装置102の加速度に対応する加速度情報に基づいて、第1の距離および/または第2の距離を決定するように構成することができる。
いくつかの例示的な実施形態では、装置102は、カメラ118および/または装置102の加速度情報をアプリケーション160に提供するように構成された加速度計126を含むことができる。
いくつかの例示的な実施形態では、アプリケーション160を、例えば、物体の1つ以上の3次元(3D)座標に基づいて、第1の距離および/または第2の距離を決定するように構成することができる。
いくつかの例示的な実施形態では、装置102は、物体の1つ以上の3次元(3D)座標を決定するように構成された3Dセンサを含むことができる。
いくつかの例示的な実施形態では、アプリケーション160を、例えば、物体と、既知の寸法を有する較正物体、例えば、較正物体301(図3)の画像における少なくとも1つの寸法と、に基づいて、第1の距離を決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記するような、例えば、1つ以上の動作に従って、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態による、レンズの1つ以上の光学パラメータを決定する方法を概略的に示す図5を参照する。例えば、図5の方法の1つまたは動作を、システム、例えばシステム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって実行することができる。
ブロック502に示すように、方法は、ディスプレイ上に物体を表示するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、ディスプレイ130(図1)に物体を表示させることができる。
ブロック504に示すように、方法は、眼鏡レンズ(「レンズアンダーテスト(Lens Under Test)」(LUT)とも称される)をディスプレイからある距離に配置するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、レンズをディスプレイ130(図1)からレンズ距離に配置するようにユーザに指示することができる。
ブロック506に示すように、方法は、ディスプレイ上に表示された物体の画像を眼鏡レンズを通してカメラで取り込むステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、例えば、レンズを介して、カメラ118(図1)に物体の画像を取り込ませることができる。
ブロック508に示すように、方法は、ディスプレイからのカメラの第1の距離、例えば、カメラ距離、およびディスプレイからの眼鏡レンズの第2の距離、例えば、レンズ距離を決定するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、レンズ距離およびカメラ距離を決定することができる。
いくつかの例示的な実施形態では、カメラ距離および/またはレンズ距離を、推定し、与えおよび/またはユーザにアドバイスすることができる。
ブロック510に示すように、方法は、例えば、例示的な物体に関して後記するように、特定の経線に対する物体の最大倍率を推定するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、特定の経線の物体の倍率を推定することができる。
ブロック512に示すように、方法は、特定の経線に対するレンズの焦点屈折力を計算するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、対応する軸に対する眼鏡レンズの焦点屈折力を決定することができる。
ブロック514に示されるように、倍率が様々な経線に対して変化する場合、方法は、最小倍率および対応する経線の位置を特定するステップ、およびその焦点屈折力を計算するステップを含むことができる。例えば、アプリケーション160(図1)は、倍率が数経線の間で変化することを決定することができ、したがってアプリケーション160(図1)を、例えば、後記されるような最小倍率軸および最小倍率軸の倍率を決定することができる。
ブロック516に示すように、本方法は、2つの焦点屈折力と円柱の角度との間の差として円柱度数を決定するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、最小倍率軸における第1の倍率および最大倍率軸における第2の倍率に基づいて、例えば、後記されるように、レンズの円柱度数を決定することができる。
いくつかの例示的な実施形態では、アプリケーション160(図1)を、ブロック508の動作を遂行して、例えば、カメラ距離および/またはレンズ距離を決定するための1つ以上の技術を実行するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160(図1)を、例えば、後記するように、カメラ距離および/またはレンズ距離を決定するために1つ以上の動作を遂行するように構成することができる。
いくつかの例示的な実施形態では、カメラ距離および/またはレンズ距離を決定するステップは、ディスプレイ上に既知のサイズを有する較正物体を表示するステップと、カメラによるディスプレイの画像を取り込むステップと、較正物体の取り込まれた画像に基づいて、距離を評価するステップと、を含むことができる。
いくつかの例示的な実施形態では、カメラ距離および/またはレンズ距離を決定するステップは、例えばレター、A4紙、1メートルおよび/または同様のものの基準既知サイズの物体を用いてカメラからディスプレイまでの距離を測定するステップを含むことができる。
いくつかの例示的な実施形態では、カメラ距離および/またはレンズ距離を決定するステップは、例えば、加速度計126(図1)からの例えば、加速度計データを積分することによって、ディスプレイからのカメラの変位を測定するステップを含むことができる。
いくつかの例示的な実施形態では、カメラ距離および/またはレンズ距離を決定するステップは、カメラ距離および/またはレンズ距離を決定するために、例えば、3Dセンサまたは深度カメラを使用するステップを含むことができる。
図1に戻って参照すると、いくつかの例示的な実施形態では、アプリケーション160(図1)を、例えば、後記されるような1つ以上の測定スキームに基づいて、レンズの光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、第1の測定スキームは、例えば、後記されるように、例えば、レンズ距離がカメラ距離の約半分であるように、カメラ118とディスプレイ130との間の中央にレンズを配置するステップを含むことができる。
いくつかの例示的な実施形態では、第2の測定スキームは、例えば、後記するように、例えばレンズ距離がテンプルアームの長さ、例えば、約14.5cmに基づくように、例えば、眼鏡を事前に定義されている粗い距離に位置させるために、ディスプレイ130に対して延びるテンプルアームによって眼鏡を配置するステップを含むことができる。
いくつかの例示的な実施形態では、第3の測定スキームは、カメラ118をディスプレイ130から比較的固定された距離に保つステップと、レンズをカメラ118からディスプレイ130に向かって移動させながら、および/またはディスプレイ130からカメラ118へと後方に移動させながらレンズを介して画像を取り込むステップと、含むことができる。
いくつかの例示的な実施形態では、レンズ距離を、例えば、後記するように、例えば、レンズを介して取り込まれた画像が最大相対倍率を有する位置で、カメラ距離の約半分であると決定することができる。
いくつかの例示的な実施形態では、第4の測定スキームは、眼鏡レンズをディスプレイから一定の距離に配置するステップと、例えば、後記するように、レンズを介して取り込まれた画像が、例えば、最大相対倍率を有する場所を決定するためにカメラ位置を変更しながら、カメラによっていくつかの画像を取り込むステップと、を含むことができる。
いくつかの例示的な実施形態では、第5の測定スキームは、眼鏡のフレームをディスプレイから一定の距離に配置するステップと、カメラがレンズから離れた距離に位置するレンズを通して画像を取り込むステップと、例えば、後記するように、カメラによって取り込まれた画像内の眼鏡のフレームのサイズからのレンズ距離を決定するステップと、を含むことができる。
いくつかの例示的な実施形態では、第6の測定スキームは、例えば、テンプルアームを延ばすことによって、または既知の距離を決定するための任意の他の方法を使用して、眼鏡をディスプレイから既知の距離に配置するステップと、レンズを通して画像を取り込むためにカメラを別の既知の距離に配置するステップと、を含むことができる。
いくつかの例示的な実施形態では、第6の測定スキームに従って、レンズ距離を知ることができ、カメラ距離は、例えば、後記するように、例えば、ディスプレイ130に表示された既知のサイズの画像およびカメラパラメータに基づいて、計算することができる。
いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記するように、例えば、第1の測定スキームに従って、カメラ距離、レンズ距離および/またはレンズの1つ以上の光学パラメータを推定するための1つ以上の動作を遂行するように構成することができる。
いくつかの例示的な実施形態による、測定スキーム600を概略的に示す図6を参照する。例えば、測定スキーム600を使用する1つまたは動作を、システム、例えばシステム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)など、および/またはアプリケーション、例えば、アプリケーション160(図1)、によって遂行することができる。
いくつかの例示的な実施形態では、測定スキーム600を、例えば、第1の測定スキームに従って、レンズ610の1つ以上の光学パラメータを決定することができるように構成することができる。
いくつかの例示的な実施形態では、図6に示すように、画像取り込み装置602を、Lで示された既知の距離、例えば、ディスプレイ630からのカメラ距離、に配置することができる。例えば、装置602は、カメラ118(図1)の機能を遂行することができ、および/またはディスプレイ630は、ディスプレイ130(図1)の機能を遂行することができる。
いくつかの例示的な実施形態では、カメラ距離Lを、ユーザによって検証することができ、および/または較正物体の画像、およびカメラの1つ以上のパラメータ、例えば、焦点距離、視野、および/またはセンサピッチに基づいて、計算することができる。
いくつかの例示的な実施形態では、図6に示されるように、レンズを、装置602とディスプレイ630との間のほぼ中間、例えば、距離0.5Lで示される距離に、配置することができる。
いくつかの例示的な実施形態では、中心におけるレンズの位置決めに対する感度が低いので、レンズの1つ以上の光学パラメータの正確な推定を達成することができる。例えば、カメラとディスプレイとの間の中間から数センチメートル以内であっても、レンズを位置決めすることは、レンズがカメラとディスプレイとの間の真ん中に位置決めされているかのように、レンズの1つ以上の光学パラメータを決定することを可能にし得る。
いくつかの例示的な実施形態による、レンズの1つ以上の光学パラメータを決定する方法を概略的に示す図7を参照する。例えば、図7の方法の1つまたは動作を、システム、例えばシステム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって遂行することができる。
いくつかの例示的な実施形態では、図7の方法の1つ以上の動作を、例えば第1の測定スキーム、例えば測定スキーム600(図6)を使用して遂行することができる。
ブロック704に示すように、方法は、ディスプレイ上に物体を表示するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、ディスプレイ130(図1)に物体を表示させることができる。
ブロック702に示すように、本方法は、例えば、後記するように、ディスプレイを較正するステップを任意選択で含むことができる。
ブロック706に示すように、方法は、カメラ装置をディスプレイからの既知のまたは推定された距離に配置するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、図6を参照して上記したように、例えばカメラ118(図1)をディスプレイ130(図1)から特定の距離に配置するようにユーザに指示することができる。
ブロック708に示すように、方法は、ディスプレイとカメラとの間のほぼ中間にレンズを配置することを含むことができる。例えば、アプリケーション160(図1)は、例えば、図6を参照して上記したように、カメラ118(図1)とディスプレイ130(図1)との間の中間にレンズを配置するようにユーザに指示することができる。
ブロック710に示すように、方法は、レンズを通して表示された画像の画像を取り込むステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、例えば、レンズを介して、カメラ118(図1)に物体の画像を取り込ませることができる。
ブロック712に示すように、方法は、取り込まれた画像を解析し、レンズの度数および円柱を決定するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、例えば、取り込まれた画像に基づいて、レンズの1つ以上の光学パラメータを決定することができる。
図1に戻って参照すると、いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記するように、例えば、第2の測定スキームに従って、カメラ距離、レンズ距離および/またはレンズの1つ以上の光学パラメータを推定するための1つ以上の動作を遂行するように構成することができる。
いくつかの例示的な実施形態による、測定スキーム800を概略的に示す図8を参照する。例えば、測定スキーム800を使用する1つまたは動作を、システム、例えば、システム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって遂行することができる。
いくつかの例示的な実施形態では、測定スキーム800を、例えば、第2の測定スキームに従って、レンズ810の1つ以上の光学パラメータを決定することができるように構成することができる。
いくつかの例示的な実施形態では、図8に示すように、レンズ810を、ディスプレイ830からLで示される既知の距離にすることができる。例えば、ディスプレイ830は、ディスプレイ130(図1)の機能を遂行することができる。
いくつかの例示的な実施形態では、図7に示すように、眼鏡のテンプルアームを完全に延ばし、ディスプレイ830に接触させることによってレンズ810を距離Lに配置することができる。
いくつかの例示的な実施形態では、テンプルアームは、固定された長さ、例えば、典型的には13.5cm〜15cmの長さであるので、レンズとディスプレイとの間の距離を、十分に画定することができる。
いくつかの例示的な実施形態では、図8に示すように、画像取り込み装置802を、ディスプレイ830から2Lで示される距離、例えば、テンプルアームの長さの約2倍の距離に配置することができる。例えば、装置802は、カメラ118(図1)の機能を遂行することができる。
いくつかの例示的な実施形態では、レンズの1つ以上の光学パラメータを、例えば、距離2Lから物体の画像を取り込むことによって決定することができる。
いくつかの例示的な実施形態による、レンズの1つ以上の光学パラメータを決定する方法を概略的に示す図9を参照する。例えば、図9の方法の1つまたは動作を、システム、例えば、システム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって実行することができる。
いくつかの例示的な実施形態では、図9の方法の1つ以上の動作を、例えば、第2の測定スキーム、例えば、測定スキーム800(図8)に従って遂行することができる。
ブロック902に示すように、方法は、画素/mm比を見つけるために画面を較正するステップを任意選択に含むことができる。例えば、アプリケーション160(図1)を、例えば後記するように、ディスプレイ130(図1)を較正するように構成することができる。
ブロック904に示すように、方法は、眼鏡のテンプルアームを延ばして、それらをディスプレイに対して配置するステップを含むことができる。例えば、アプリケーション160(図1)は、眼鏡テンプルアームを延ばして、例えば、上記したようにディスプレイ130(図1)に対してそれらを配置するようにユーザに指示することができる。
ブロック906に示すように、方法は、カメラ装置を、ディスプレイから既知または推定された距離、例えば、テンプルアームの約2倍の長さに配置するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、カメラ118(図1)をディスプレイ130(図1)から既知または推定した距離に配置するようにユーザに指示することができる。
ブロック908に示すように、方法は、レンズを通して画像を取り込むステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、例えば、レンズを介して、カメラ118(図1)に物体の画像を取り込ませることができる。
ブロック910に示すように、方法は、レンズ度数および円柱度数および円柱軸を決定するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、例えば、取り込まれた画像に基づいて、レンズの1つ以上の光学パラメータを決定することができる。
図1に戻って参照すると、いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記するように、例えば、第3の測定スキームに従って、カメラ距離、レンズ距離および/またはレンズの1つ以上の光学パラメータを推定するための1つ以上の動作を遂行するように構成することができる。
いくつかの例示的な実施形態による、測定スキーム1100を概略的に示す図10を参照する。例えば、測定スキーム1000を使用する1つまたは動作を、システム、例えば、システム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって遂行することができる。
いくつかの例示的な実施形態では、測定スキーム1000を、例えば、第3の測定スキームに従って、レンズ1010の1つ以上の光学パラメータを決定することができるように構成することができる。
いくつかの例示的な実施形態では、図10に示すように、画像取り込み装置1002を、Lで示された特定の距離、例えば、ディスプレイ1030からのカメラ距離、に配置することができる。例えば、装置1002は、カメラ118(図1)の機能を遂行することができ、および/またはディスプレイ1030は、ディスプレイ130(図1)の機能を遂行することができる。
いくつかの例示的な実施形態では、図10に示すように、レンズ1010を、例えば、最大相対倍率を見つけるために、装置1002とディスプレイ1030との間で移動させることができる。
いくつかの例示的な実施形態では、測定スキーム1000によれば、レンズの位置を監視する必要がない場合がある。
いくつかの例示的な実施形態による、レンズの1つ以上の光学パラメータを決定する方法を概略的に示す図11を参照する。例えば、図11の方法の1つまたは動作を、システム、例えば、システム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって遂行することができる。
いくつかの例示的な実施形態では、図11の方法の1つ以上の動作を、例えば、第3の測定スキーム、例えば、測定スキーム1000(図11)に従って遂行することができる。
ブロック1102に示すように、方法は、画素/mm比を見つけるために画面を較正するステップを任意選択に含むことができる。例えば、アプリケーション160(図1)を、例えば、後記するように、ディスプレイ130(図1)を較正するように構成することができる。
ブロック1104に示すように、方法は、ディスプレイ上に物体を表示するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、ディスプレイ130(図1)に物体を表示させることができる。
ブロック1106に示すように、方法は、カメラ装置をディスプレイからの特定の距離に保持するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、カメラ118(図1)をディスプレイ130(図1)から特定の距離に配置するようにユーザに指示することができる。
いくつかの例示的な実施形態では、方法は、カメラ距離を計算するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、カメラ距離を決定することができる。
ブロック1108に示すように、方法は、レンズを、カメラ118の近くに配置するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、レンズを、カメラ118(図1)の近くに配置するようにユーザに指示することができる。
ブロック1110に示すように、方法は、レンズをディスプレイに向かって移動させながら一連の画像を取り込むステップを含むことができる。例えば、アプリケーション160(図1)は、カメラ118(図1)に、例えば、上術したように、レンズをディスプレイ130(図1)に向かって移動させながら一連の画像を取り込ませることができる。
他の実施形態では、レンズをディスプレイから離れておよびカメラに向かって移動させることができる。例えば、レンズをディスプレイの近くに配置することができ、レンズをカメラに向かって移動させながら一連の画像を取り込むことができる。
いくつかの例示的な実施形態では、第1の任意選択または第2の任意選択を使用して、レンズのディスプレイへ向かう移動をいつ停止するべきかを決定することができる。
いくつかの例示的な実施形態では、第1の任意選択は、レンズがディスプレイに非常に近いときに停止するステップを含むことができる。
いくつかの例示的な実施形態では、第2の任意選択は、任意の軸の相対的な倍率を計算するステップ、および倍率がピークに達した後に移動を停止するステップを含むことができる。
ブロック1112に示すように、方法は、最大倍率で画像を決定するステップと、円柱歪みをチェックするステップとを含むことができる。例えば、アプリケーション160(図1)は、例えば、後記するように、例えば、特定の経線に対する物体の最大倍率に基づいて、円柱軸を決定することができる。
一例では、円形物体が使用されるとき、楕円形状を見ることができる。
ブロック1116に示すように、方法は、各々の軸の相対的な倍率および距離に基づいて、レンズ度数および円柱度数を計算するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、例えば、各々の軸の倍率に基づいて、眼鏡レンズの焦点屈折力および円柱度数を決定することができる。
いくつかの例示的な実施形態では、方法は、取り込まれた画像の残りの部分での円柱歪みの一貫性を検査するステップを任意選択で含むことができる。
一例では、円柱歪みの一貫性は、移動中の意図しない回転を示す場合がある。
図1に戻って参照すると、いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記するように、例えば、第4の測定スキームに従って、カメラ距離、レンズ距離および/またはレンズの1つ以上の光学パラメータを推定するための1つ以上の動作を遂行するように構成することができる。
いくつかの例示的な実施形態による、測定スキーム1200を概略的に示す図12を参照する。例えば、測定スキーム1200を使用する1つまたは動作を、システム、例えば、システム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって遂行することができる。
いくつかの例示的な実施形態では、測定スキーム1200を、例えば、第4の測定スキームに従って、レンズ1210の1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、図12に示すように、レンズを、Lで示された特定の距離、例えばディスプレイ1230からのレンズ距離、に配置することができる。例えば、ディスプレイ1230は、ディスプレイ130(図1)の機能を遂行することができる。
いくつかの例示的な実施形態では、図2に示すように、画像取り込み装置1202を、レンズ1210の近くに配置することができる。例えば、装置1002は、カメラ118(図1)の機能を遂行することができる。
いくつかの例示的な実施形態では、図12に示すように、装置1202を、例えば、最大相対倍率を見つけるために、レンズ1210から、2Lで示されたある距離、例えば、カメラ距離まで移動させることができる。
他の実施形態では、装置1202を、例えば、レンズ1210を介して表示された物体の一連の画像を取り込みながら、ディスプレイから約2Lの距離に設置し、レンズ1210に向かって移動することができる。
いくつかの例示的な実施形態では、いくつかの画像が取り込まれる場合、選択された画像、例えば最大相対倍率を有する画像を使用して、例えば、選択された画像で取り込まれる既知のサイズの物体からカメラ距離を決定し、レンズ距離をカメラ−ディスプレイの距離の半分として決定することによって、例えば、1つ以上の、例えば、レンズ1210の全ての光学パラメータを決定することができる。
いくつかの例示的な実施形態による、レンズの1つ以上の光学パラメータを決定する方法を概略的に示す図13を参照する。例えば、図13の方法の1つまたは動作を、システム、例えば、システム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって遂行することができる。
いくつかの例示的な実施形態では、図13の方法の1つ以上の動作を、例えば第4の測定スキーム、例えば測定スキーム1200(図12)に従って遂行することができる。
ブロック1302に示すように、方法は、画素/mm関係を見つけるために画面を較正するステップを任意選択に含むことができる。例えば、アプリケーション160(図1)を、例えば後記するように、ディスプレイ130(図1)を較正するように構成することができる。
ブロック1304に示すように、方法は、ディスプレイ上に物体を表示するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、ディスプレイ130(図1)に物体を表示させることができる。
ブロック1306に示すように、方法は、カメラ118をディスプレイからの特定の距離に保持するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、カメラ118(図1)をディスプレイ130(図1)からDで示される、特定の距離に配置するようにユーザに指示することができる。
ブロック1308に示すように、方法は、カメラ距離を計算するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば上記したように、カメラ距離を決定することができる。
ブロック1310に示すように、方法は、レンズを装置と同じ距離に配置するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、レンズを、カメラ118の近くに配置するようにユーザに指示することができる。
ブロック1312に示すように、方法は、カメラ118を、距離2Dまで後方に向かって移動させるステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、カメラ118(図1)を距離2Dに移動させるようにユーザに指示することができる。
ブロック1314に示すように、方法は、レンズを通して画像を取り込むステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、例えば、レンズを介して、カメラ118(図1)に画像を取り込ませることができる。
ブロック1316に示すように、方法は、最大倍率で画像を決定するステップと、円柱歪みをチェックするステップとを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、特定の経線の物体の最大倍率を決定することができる。
一例では、円形物体の場合、例えば、後記するように、楕円形状を見ることができる。
ブロック1318に示すように、方法は、画像歪みから円柱角度を決定するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、例えば、特定の経線に対する物体の最大倍率に基づいて、円柱軸を決定することができる。
ブロック1320に示すように、方法は、例えば、各々の軸について、相対倍率を決定し、レンズ度数を計算するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、例えば、各々の軸の倍率に基づいて、眼鏡レンズの焦点屈折力および円柱度数を決定することができる。
図1に戻って参照すると、いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記するように、例えば、第5の測定スキームに従って、カメラ距離、レンズ距離および/またはレンズの1つ以上の光学パラメータを推定するための1つ以上の動作を遂行するように構成することができる。
いくつかの例示的な実施形態による、測定スキーム1400を概略的に示す図14を参照する。例えば、測定スキーム1400を使用する1つ以上の動作を、システム、例えば、システム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって遂行することができる。
いくつかの例示的な実施形態では、測定スキーム1400を、例えば、第5の測定スキームに従って、レンズ1410の1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、図14に示すように、画像取り込み装置1402を、L2で示された特定の距離、例えば、ディスプレイ1430からのカメラ距離、に配置することができる。例えば、装置1402は、カメラ118(図1)の機能を遂行することができ、および/またはディスプレイ1430は、ディスプレイ130(図1)の機能を遂行することができる。
いくつかの例示的な実施形態では、図14に示すように、レンズ1420を、L1で示された距離、例えば、レンズ1420とディスプレイ1430との間のレンズ距離、に配置することができる。
いくつかの例示的な実施形態では、図14に示すように、装置1402は、ディスプレイ1430に表示された物体の画像をレンズ1410を介して取り込むことができる。
いくつかの例示的な実施形態では、カメラ距離L2、および/またはレンズ距離L1は任意であり得る。
いくつかの例示的な実施形態では、レンズ1410を含むフレームの絶対的な形体またはディスプレイからのフレームの距離は、既知のものまたは較正されたものと考えることができる。
いくつかの例示的な実施形態では、既知のまたは較正されたフレームサイズ、またはフレーム内の他の任意の形体(「較正物体」)について、レンズ距離およびカメラ距離を、例えば、後記するように推定することができる。
いくつかの例示的な実施形態では、較正物体は、既知のおよび/または与えられ得る、hで示される、高さを有することができる。
いくつかの例示的な実施形態では、既知の物体の高さhは、例えば、レンズの高さ、フレームの幅、ブリッジの長さおよび/または眼鏡の任意の他の部分などの、フレームの既知のまたは較正された形体として考えることができる。
いくつかの例示的な実施形態では、フレームの要素の形体サイズを、例えば、指定されたフレームモデルのクエリからデータベースに与えることができ、および/または装置102(図1)のユーザによって指定することができる。
いくつかの例示的な実施形態では、例えば、レンズを介して取り込まれたときの較正物体の画像(「較正画像」)は、h’で示される画像化された高さを有することができる。
いくつかの例示的な実施形態では、例えば、後記するように、uで示される、レンズと較正物体との間の距離を、例えば、既知であっても与えられてもよいレンズのEFL(effective focal length)、高さh、および/または画像化された、h’で示される高さに基づいて、決定することができる。
いくつかの例示的な実施形態では、例えば、以下のような三角形の相似に基づいて、以下の式を与えることができる。
ここで、νはレンズのほぼEFLである。
いくつかの例示的な実施形態では、較正画像の画像化された高さh’は、較正画像によって占有されたh’_pixels_estimatedと示された画素の数と、レンズのpitchと表されるセンサピッチと、に基づくことができ、例えば、以下のようである。
いくつかの例示的な実施形態では、距離uは、例えば、式16および式17に基づいて、決定することができ、例えば、以下のようである。
図1に戻って参照すると、いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記するように、例えば、第6の測定スキームに従って、カメラ距離、レンズ距離および/またはレンズの1つ以上の光学パラメータを推定するための1つ以上の動作を遂行するように構成することができる。
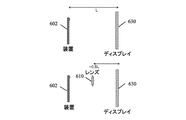
いくつかの例示的な実施形態による、測定スキーム1500を概略的に示す図15を参照する。例えば、測定スキーム1500を使用する1つ以上の動作を、システム、例えば、システム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって遂行することができる。
いくつかの例示的な実施形態では、測定スキーム1500を、例えば、第6の測定スキームに従って、レンズ1510の1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、測定スキーム1500に示すように、レンズ1510を、L1で示された距離、例えば、レンズ1510とディスプレイ1530との間のレンズ距離、に配置することができる。例えば、ディスプレイ1530は、ディスプレイ130(図1)の機能を遂行することができる。
いくつかの例示的な実施形態では、ディスプレイ1530からのフレームの距離L1を知ることができる。
いくつかの例示的な実施形態では、レンズ距離L1を、例えば、フレームを事前に定義されている距離に置くこと、テンプルアームをディスプレイに対して配置すること、ディスプレイからのフレームの距離を測定すること、および/またはディスプレイからまたはカメラからのフレームの距離を決定するための任意の他の方法を使用することにより知ることができる。
いくつかの例示的な実施形態では、例えば、装置1502が、例えば、レンズ1510を通してディスプレイ1530に表示された物体の画像を取り込むことができる限り、装置1502を、ディスプレイ1530から例えば、事前に定義されている距離または任意の距離、例えば、L2で示される、所与の距離に、位置させることができる。
いくつかの例示的な実施形態では、ディスプレイと装置との間のカメラ距離L2を、例えば、後記するように、ディスプレイ1530に表示され得る既知のサイズ、例えば、カメラ1502の1つ以上の光学パラメータ、例えば、焦点距離、視野、および/またはセンサピッチを、有する物体から計算することができる。
図1に戻って参照すると、いくつかの例示的な実施形態では、装置102は、例えば、後記するように、例えば、フレームの1つ以上の要素を較正するために、1つ以上の動作を遂行することができる。
いくつかの例示的な実施形態では、フレームを、例えば、ディスプレイ130に対してフレームを配置することおよび既知のサイズを有する較正物体を提示することができるフレームおよびディスプレイ130を含む画像を取り込むことによって較正することができる。
いくつかの例示的な実施形態では、例えば、ディスプレイ130に表示された較正物体を使用して、フレームの形体の自動検出または手動検出をスケーリングすることができる。
いくつかの例示的な実施形態では、例えば、後記するように、例えば、フレームをディスプレイ130から既知の距離に配置することによって、フレームを較正することができる。
いくつかの例示的な実施形態では、眼鏡のテンプルアームを延ばし、ディスプレイ130に対して配置することによって、ディスプレイ130からレンズを取り囲むフレームの距離を約145mmとみなすことができる。
いくつかの例示的な実施形態では、例えば、145mmの距離および1つ以上のカメラレンズ特性に対して、例えば、較正物体の表示された画像の倍率に従って、フレームの形体を較正することができる。
いくつかの例示的な実施形態では、例えば、眼鏡がディスプレイ130とカメラ118との間の真ん中にあるときに、例えば、最大倍率が生じるという事実を使用して、フレームを較正することができる。
いくつかの例示的な実施形態では、この事実を使用して、フレームの実際の場所の距離を、装置102とディスプレイ130との間の測定された距離の半分であると決定することができる。
いくつかの例示的な実施形態では、焦点距離およびセンサ画素ピッチが与えられる絶対倍率に変換された既知の距離を使用して、例えば、以下のように決定することができる。
ここで、h’pixelsは、フレーム形体がセンサ上に収容する画素の量であり、ピッチは、1つの画素から隣接画素までの距離であり、Lは、ディスプレイと装置の距離、および/またはfはカメラの焦点距離である。
いくつかの例示的な実施形態では、装置102は、例えば、後記するように、例えば、装置130の表示サイズを較正するために、1つ以上の動作を遂行することができる。
いくつかの例示的な実施形態では、ディスプレイ130の較正を、例えば、ディスプレイに対して配置された既知のサイズを有する物体の画像を取り込むことによって遂行することができる。
いくつかの例示的な実施形態では、既知のサイズを有する物体は、標準磁気カード、CDメディア、定規、電池(AA、AAA...)および/または同様のものとすることができる。
いくつかの例示的な実施形態では、既知のサイズを有する物体は眼鏡のテンプルアームの長さとすることができる。アームの長さは、典型的には、13.5cm〜15cmである。この精度は、さらなる推定には十分であり得る。
いくつかの例示的な実施形態では、眼鏡のアーム上にテンプルアームの長さをスクライビングすることができ、長さを表示較正に使用することができる。
いくつかの例示的な実施形態では、ディスプレイを較正するステップは、既知の寸法を有する物体を、既知の画素量を有する表示された形体と比較するステップを含むことができる。
いくつかの例示的な実施形態では、scalingと示されるスケーリング係数を、例えば、以下のように決定することができる。
いくつかの例示的な実施形態では、ディスプレイのスケーリングを適用して、ディスプレイ上に絶対サイズを有する形体を表示することができる。
いくつかの例示的な実施形態では、ディスプレイの較正を、例えば、カメラレンズの実効焦点距離および/またはカメラレンズの視野またはセンサピッチを考慮して、既知の距離でディスプレイ130の画像を取り込むことによって遂行することができる。
いくつかの例示的な実施形態では、焦点距離fを有するカメラからカメラ距離Lに位置付けされた、サイズHの物体のサイズhを有する画像のMで示された、倍率を、例えば、次のように決定することができる。
いくつかの例示的な実施形態では、例えば、センサピッチp[μm/pixel]に基づいて、装置上の画像の実際のサイズhを、例えば、次のように計算することができる。
ここで、hpixは、装置上の画像スパンの画素数である。
いくつかの例示的な実施形態では、ディスプレイ上の画像の絶対サイズHを、例えば、以下のように決定することができる。
いくつかの例示的な実施形態では、一旦、Hの寸法を有する表示物体が決定されると、ディスプレイへのスケーリングを適用して、ディスプレイ上の既知の絶対サイズの形体を表示することができる。
別の実施形態では、ディスプレイに表示されている画像をスケーリングせずに、ディスプレイから画像を評価するときに、スケーリング係数を考慮することができる。
例えば、幅が375mmの画面は、この寸法に対して1024画素を収容できる。100画素の較正物体をディスプレイ上に表示し、カメラで取り込むことができる。300mmの寸法を有する既知のサイズの物体(「基準物体」)をディスプレイ上に配置することができる。
いくつかの例示的な実施形態では、較正物体の画像および基準物体の画像を含む画像の画像解析は、基準物体が120画素を収容し、較正物体が60画素を収容することを示すことができる。したがって、スケーリング係数は、1.5mm/画素とすることができる。
いくつかの例示的な実施形態では、ディスプレイ上に提示された画像を、例えば、所定の既知のサイズの物体と一致するように、スケーリングすることができる。
一例では、60mmの寸法を有する画像を表示するために、40画素を有する画像が表示されるべきである。
別の例では、すべての画面上に同じ量の画素を表示することができ、スケーリング係数は、例えば、画像を取り込むときに倍率を考慮することができる。この例によれば、スケーリング係数を、例えば、ディスプレイ上に表示された物体の絶対寸法を評価するために考慮することができる。
いくつかの例示的な実施形態による、測定スキーム1600を概略的に示す図16を参照する。例えば、較正スキーム1600を、ディスプレイ130(図1)を較正するために実行することができる。
いくつかの例示的な実施形態では、図16に示すように、基準物体1604、例えば、クレジットカードを、ディスプレイ1630に対して配置することができる。
他の実施形態では、基準物体1604は、ディスプレイに対して配置された延ばされた眼鏡テンプルアームを含むことができる。
いくつかの例示的な実施形態では、画像取り込み装置1602、例えば、カメラ118(図1)は、基準物体1604の画像を取り込むことができる。
いくつかの例示的な実施形態では、図16に示すように、ディスプレイ1630を、例えば、アプリケーション160(図1)によってトリガすることができ、1つ以上の較正物体1606、例えば、楕円または境界線形状を表示することができる。
いくつかの例示的な実施形態では、例えば、上記したように、基準物体1604を較正物体1606と比較することによって、ディスプレイ1630の画素対ミリメートル比を決定することができる。
いくつかの例示的な実施形態では、形体および物体の自動識別を利用できるように、較正物体1606を色の異なるチャネル、例えば赤−緑−青から構成することができる。
図1に戻って参照すると、いくつかの例示的な実施形態では、アプリケーション160を、例えば、ディスプレイ130上に表示された較正物体の画像に関する1つ以上のパラメータ、視覚効果、光学効果、および/または属性を分析するように構成することができる。
いくつかの例示的な実施形態では、較正物体は、形状および/または色を含むことができる。
いくつかの例示的な実施形態では、装置102は、同じ角度の焦点屈折力に対応する特定の角度について形状の倍率の分析を遂行することができる。
いくつかの例示的な実施形態では、球面レンズは、例えば、すべての角度で均一な倍率を生成することができる。
いくつかの例示的な実施形態では、円柱レンズは、例えば、円柱レンズの角度に対応する角度で最大倍率を引き起こすことができ、円柱角度に垂直な角度において相対倍率を引き起こすことができない。
いくつかの例示的な実施形態では、球面レンズと円柱レンズとの組み合わせは、例えば、異なる相対的な倍率が明らかな2つの垂直な角度を生成することができる。
いくつかの例示的な実施形態では、円柱の角度に対応する角度および各々の角度での倍率が焦点距離計算のための基礎とすることができる。
いくつかの例示的な実施形態では、例えば、円柱レンズのために2つの焦点屈折力の結果を示すことができる。
いくつかの例示的な実施形態では、2つの焦点屈折力の差を、円柱度数として考えることができる。
いくつかの例示的な実施形態に従って、レンズ1710を介して取り込まれた物体1702の画像1700を概略的に示す図17を参照する。
例えば、アプリケーション160(図1)を、物体1102の画像に基づいて、レンズ1710の1つ以上のパラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、図17に示すように、画像1700は、レンズ1710の2つの焦点屈折力の倍率の効果を示すことができる。
いくつかの例示的な実施形態では、図17に示すように、物体1702を、いくつかの半径の半径方向線から構成することができる。
いくつかの例示的な実施形態では、図17に示すように、レンズ1710の2つの焦点屈折力が2つの倍率を、生成することができる。
いくつかの例示的な実施形態では、図17に示すように、両方の度数が負であるので、レンズ1710の2つの焦点屈折力が2つの縮小を生成することができる。
いくつかの例示的な実施形態では、図17に示すように、あらゆる角度において各々の半径方向線の長さを測定することは、長さが変化することが実証され得、これは、互いに垂直な2つの焦点屈折力の倍率の効果である。
いくつかの例示的な実施形態では、図17に示すように、この効果は、角度1712で最大倍率を示し、垂直角度1714で最小倍率を示す線を画像内に生成することができる。
いくつかの例示的な実施形態では、これらの2つの倍率は、例えば、アプリケーション160(図1)によって使用されて、2つの焦点屈折力を決定することができ、最大倍率が生じる角度は、例えば、アプリケーション160(図1)によって使用されて、円柱の角度を決定することができる。
いくつかの例示的な実施形態では、図17に示すように、円形対称物体を物体1702として利用することができる。この場合、画像は倍率変化を経ることがあり、円柱レンズの場合、これは楕円形になる。
いくつかの例示的な実施形態では、レンズ度数、レンズ円柱度数および/または円柱角度は、例えばアプリケーション160(図1)によって、例えば全倍率および長楕円軸と短楕円軸との比および楕円の角度を調べることによって、抽出することができる。
いくつかの例示的な実施形態による物体1802の画像1800を概略的に示す図18を参照する。
いくつかの例示的な実施形態では、図18に示すように、例えば、物体1802の他の部分を、レンズ1810で十分に取り込むことができないが、物体1802を、レンズ1810を介して部分的に取り込むことができる。
例えば、アプリケーション160(図1)を、物体1802の画像に基づいて、レンズ1810の1つ以上のパラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、図18に示すように、物体1802は、いくつかの半径の半径方向線から構成され得る物体を含むことができ、各々の線を破線で構成することができ、異なる半径を、異なる色または異なる線種によって示すことができる。
いくつかの例示的な実施形態では、例えば、破線を含む物体1802の使用は、例えば、各々の線の空間周波数が異なる倍率の下で変化するので、倍率を決定することを助けることができる。
いくつかの例示的な実施形態に従って、レンズ1910を介して取り込まれた物体1902の画像1900を概略的に示す図19を参照する。例えば、アプリケーション160(図1)を、物体1902の画像に基づいて、レンズ1910の1つ以上のパラメータを決定するように構成することができる。
図19に示すように、いくつかの例示的な実施形態では、レンズ1910は、球面レンズおよび円柱レンズを含むことができる。
図19に示すように、いくつかの例示的な実施形態では、物体1902の取り込み画像1900は、角度1912で最大倍率を生成する倍率の変化と、垂直角度1914で最小倍率を生成することができる。
いくつかの例示的な実施形態では、図19に示すように、取り込まれた画像1900は、経線ごとに異なる倍率によって引き起こされ得る、異なる経線における線の空間周波数を示すことができる。
いくつかの例示的な実施形態では、円柱効果が、等しい半径方向線が楕円形を生成させることは明らかであり得る。
いくつかの例示的な実施形態に従って、レンズ2010を介して取り込まれた物体2002の画像2000を概略的に示す図20を参照する。
例えば、アプリケーション160(図1)を、物体2002の画像に基づいて、レンズ2010の1つ以上のパラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、図20に示すように、物体2002は、すべての線を同じ半径で接続する線のアウトラインを含むことができる。
いくつかの例示的な実施形態では、図20に示すように、画像2000は、レンズ2010の異なる垂直焦点屈折力が円形形状を楕円形状に変換する2つの垂直倍率をどのように生成するかを示すことができる。
いくつかの例示的な実施形態では、図20に示すように、最大の倍率、が角度2012、例えば、円柱軸で発生し、最小の倍率が、垂直な角度2014で発生することができる。
いくつかの例示的な実施形態では、図20に示すように、レンズ2010の方向を考慮して、円柱の絶対軸を計算することができる。楕円軸の各々について、相対的な倍率を決定することができ、その後、レンズの度数を決定することができる。
いくつかの例示的な実施形態では、異なる倍率によって、例えば、レンズ2010の度数によって、物体2002を、画像2000上に異なるスケールで表示することができる。
いくつかの例示的な実施形態では、各々が異なる半径を有するいくつかの同心円状のリングを表示することは、正の倍率と負の倍率の両方を異なる度数で分析することを可能にすることができる。
いくつかの例示的な実施形態では、例えば、異なる方向に沿った優勢な周波数を追跡することによって、例えば、フーリエ変換を使用して、これらの同心リングの倍率および円柱をさらに分析することができる。
いくつかの例示的な実施形態では、いくつかの物体を使用することにより、例えば、平均化によって精度を改善するという利点を提供することができる。
他の実施形態では、物体2002は高密度のグリッド線を含むことができる。
いくつかの例示的な実施形態では、レンズ度数、円柱および収差を、例えば、高密度グリッド線内の歪みに追従することによって導き出すことができる。
いくつかの例示的な実施形態では、物体2002は、例えば、画像200内の特定の形体を識別できるように、色素効果を含むことができる。例えば、緑色や赤色などの色の小さな焦点ぼけは、例えば、2つの色が隣接しているような黄色になる場合がある。
図1に戻って参照すると、いくつかの例示的な実施形態では、アプリケーション160を、レンズを介して取り込まれた画像がレンズの中心を介して取り込まれると判定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160を、レンズの中心からの最小変位がレンズを介して取り込まれた画像であることを確実にするように、1つ以上の動作、方法および/または手順を遂行するように構成することができる。
いくつかの例示的な実施形態による、円形リング物体2102の楕円曲線フィット2100を概略的に示す図21を参照する。
いくつかの例示的な実施形態では、楕円曲線フィット2100は、例えば、円柱レンズを介して円形リング物体2102を取り込むことによって得られる。
いくつかの例示的な実施形態では、図21に示すように、円形のリング物体画像2100の楕円曲線フィット2102を、円柱形のテストレンズを通して取り込むことができる。
図1に戻って参照すると、いくつかの例示的な実施形態では、アプリケーション160を、例えば、ディスプレイ130を使用しなくても、レンズの1つ以上の光学パラメータを決定するように構成することができる。例えば、アプリケーション160は、例えば、後記するように、ディスプレイ130を使用しなくても、円柱度数、および/またはレンズの円柱角度および/または球面度数を決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160を、例えば、ディスプレイ130に画像を表示しなくても、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記するように、例えば、既知のサイズを有する物体の取り込まれた画像に基づいて、レンズの1つ以上の光学パラメータを決定するように構成することができる。
いくつかの例示的な実施形態では、例えば、カメラまたはスマートフォン装置および既知のサイズを使用することによって、球面度数、円柱度数および/または円柱角度などのレンズの1つ以上の光学パラメータを見つけることができる。
いくつかの例示的な実施形態では、レンズを介して既知のサイズの物体の画像を取り込むことによって、レンズの1つ以上の光学パラメータを見つけることができる。
いくつかの例示的な実施形態では、既知のサイズの物体は、例えば、既知のサイズを有するコイン、目の虹彩または目の較正された虹彩の直径、および/または任意の他の物体または要素を含むことができる。
いくつかの例示的な実施形態では、較正物体を使用することにより、例えば、画面を用いて物体を表示することなく、および/または、レンズの1つ以上の光学パラメータの測定の前に較正を行わずに、レンズの1つ以上の光学パラメータを決定することができる。
いくつかの例示的な実施形態では、レンズ度数および/または円柱パラメータを、テストレンズなし直接観察することができる較正物体の画像に対するテストレンズを通る較正物体の観察画像の歪みから導き出すことができる。
いくつかの例示的な実施形態では、スペクタクル眼鏡パラメータ、例えば、球面度数、円柱度数および/または円柱角度を、例えば、カメラまたはスマートフォン装置を使用して、例えば、既知のサイズの外部物体を使用することなく決定することができる。
いくつかの例示的な実施形態では、眼鏡着用者の眼の画像を取り込むことによって、スペクタクル眼鏡から生じる着用者の虹彩サイズの変化を分析することが可能であり得る。例えば、眼鏡付きまたは眼鏡なしの虹彩の画像を比較して分析して、例えば、スペクタクル眼鏡パラメータを決定することができる。
いくつかの例示的な実施形態では、必要であれば、例えば、コインまたはクレジットカードなどの既知のサイズの物体を使用して、角膜絶対サイズを較正することができる。
図1に戻って参照すると、いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記するように、眼鏡の第1のレンズと眼鏡の第2のレンズとの間の瞳孔間距離(PD:pupillary distance)を決定するように構成することができる。
いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記するように、第1の要素および第2の要素を含む物体の画像を処理するように構成することができる。一例では、アプリケーション160を、ディスプレイ130に物体を表示させるように構成することができる。
いくつかの例示的な実施形態では、画像は、第1のレンズを介して取り込まれた第1の要素の第1の画像化された要素と、第2のレンズを介して取り込まれた第2の要素の第2の画像化された要素と、を含むことができる。
いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記されるように、例えば、少なくとも第1と第2の要素との間の第1の距離および第1と第2の画像化された要素との間の第2の距離に基づいて、第1と第2のレンズとの間の瞳孔間距離を決定するように構成することができる。
いくつかの例示的な実施形態による物体2202の画像2200を概略的に示す図22を参照する。例えば、アプリケーション160(図1)は、画像2200を取り込むためにディスプレイ130(図1)に物体2202および/または制御カメラ118(図1)を表示させることができる。
いくつかの例示的な実施形態では、アプリケーション160(図1)を、例えば、後記するように、例えば、画像2200に基づいて、眼鏡の第1のレンズ2210と眼鏡の第2のレンズ2220との間の瞳孔間距離を決定するように構成することができる。
いくつかの例示的な実施形態では、図22に示すように、物体2202をディスプレイ装置上に表示することができ、第1の円対称物体2211および第2の円対称物体2221を含むことができる。他の実施形態では、物体2202は、任意の他の追加のまたは代替の形状、物体および/または要素を含むことができる。
いくつかの例示的な実施形態では、物体2211および2221は、複数の同心円状のリングを含むことができる。例えば、各々のリングは異なる半径を有することができる。他の実施形態では、物体2211および2221は、任意の他の追加のまたは代替の形状、物体および/または要素を含むことができる。
いくつかの例示的な実施形態では、図22に示すように、物体2202は、第1の線要素2212および第2の線要素2222を含むことができる。
いくつかの例示的な実施形態では、図22に示すように、線要素2212および/または2222は、垂直線形要素を含むことができる。他の実施形態では、線要素2212および2222は、任意の他の追加のまたは代替の形状、物体および/または要素を含むことができる。
いくつかの例示的な実施形態では、図22に示すように、線要素2212は、円対称物体2211の中心を横切り、および/または線要素2222は、円対称物体2221の中心を横切ることができる。
いくつかの例示的な実施形態では、線要素2212と線要素2222との間の距離2203は、事前に構成または設定することができる。一例では、距離2203を、典型的なPD値またはPD値の範囲に基づいて、構成することができる。
いくつかの例示的な実施形態では、図22に示すように、画像2200は、第1のレンズ2210を介して取り込まれた第1の要素2212の第1の画像化要素2214を含むことができる。
いくつかの例示的な実施形態では、図22に示すように、画像2200は、第2のレンズ2220を介して取り込まれた第2の要素2222の第2の画像化要素2224を含むことができる。
いくつかの例示的な実施形態では、アプリケーション160(図1)を、例えば、後記されるように、例えば、少なくとも要素2212と2222との間の第1の距離2203および画像化された要素2214と2224との間の第2の距離2213に基づいて、眼鏡内に組み立てられたレンズ2210と2220の間の瞳孔間距離を決定するように構成することができる。
いくつかの例示的な実施形態では、図22に示すように、線要素2212および/または2222は、例えば、レンズ2210および2220を介して画像化されるような距離2213および例えば、レンズ2210および2220を介さずに画像化されるような距離2203の間の変化または差を認識および/または評価することを支援することができる。
いくつかの例示的な実施形態では、アプリケーション160(図1)は、例えば、ために、画像2202を取り込むカメラ、例えばカメラ118(図1)からの眼鏡の距離、およびレンズ2210および2220の度数を利用して、画像2202からPDを評価することができる
いくつかの例示的な実施形態では、距離2203を、例えば、上記したように、知るまたは較正することができる。
いくつかの例示的な実施形態では、アプリケーション160(図1)を、後記されるように、ディスプレイ、例えば、ディスプレイ130(図1)から、カメラ、例えば、カメラ118(図1)の第1の距離(カメラ―ディスプレイ距離)、およびカメラからのレンズ2210および2220の第2の距離(「カメラ―眼鏡距離」に基づいて、レンズ220および2220を含む眼鏡のPDを決定するように構成することができる。
いくつかの例示的な実施形態では、PDを、例えば、カメラ―ディスプレイ距離およびカメラ―眼鏡距離、レンズ2210および/または2220の度数、および/または距離2203および2213に基づいて、決定することができる。
いくつかの例示的な実施形態では、図22に示すように、画像2202は、1つ以上の較正要素2206を含むことができる。
いくつかの例示的な実施形態では、較正要素2206を、レンズ2210および/または2220を介さずに画像2200に取り込むことができる。
いくつかの例示的な実施形態では、較正要素2206の1つ以上の形体を知るおよび/また測定することができる。例えば、較正要素2206の間の距離を、知るおよび/また測定することができ、較正要素2206の直径を、知るおよび/また測定することができる。
いくつかの例示的な実施形態では、アプリケーション160(図1)を、例えば、画像2200に基づいて、例えば、カメラ―ディスプレイ距離を決定するように構成さすることができる。
いくつかの例示的な実施形態では、例えば、画像2200が取り込まれたとき、眼鏡がカメラ―眼鏡距離に位置する間に、円対称物体2211および2221を、それぞれレンズ2210および2220を介して同時に画像化することができる。
いくつかの例示的な実施形態では、例えば、円形対称物体2211および2221の実際のサイズに関する、画像2202内の円対称物体2211および2221の相対的な倍率を、例えば、レンズ2210および/または2220の球面度数および/または円柱度数および/または軸を、例えば、別個に、決定することができる。
いくつかの例示的な実施形態では、例えば、線要素2212および/または2222と画像化された線要素2214および2224との間の変位によって、円対称物体2211および2221の中心の横方向変位を見ることができる。
いくつかの例示的な実施形態では、例えば、較正物体2206に関して、例えば、中心の場所を事前に定義されることができるように、例えば、線対称物体2211および2221の中心に基づいて、例えば、線要素2212および/または2222なしに、画像2200から横方向変位を導き出すことができる。
いくつかの例示的な実施形態では、レンズを通る物体の画像の横方向の変位を、例えば、レンズの光軸からのレンズ横方向変位、物体からのレンズの距離、および/または物体からのカメラの距離、および/またはレンズ度数を含む1つ以上のパラメータに、例えば、基づいて、決定することができる。
いくつかの例示的な実施形態では、アプリケーション160(図1)は、レンズ2210および2220の中心間の距離、レンズ2210および/または2220の度数、および/または円柱度数およびレンズの軸を、例えば、1つ以上のパラメータに基づいて、例えば、同時に、決定するように構成することができる。
いくつかの例示的な実施形態では、図24を参照して後記するように、例えば、眼鏡の所与のPDに基づいて、例えば、画像2200を使用して、例えば、カメラ―眼鏡距離などの、眼鏡のカメラからの距離を決定することができる。
いくつかの例示的な実施形態による、眼鏡のレンズの瞳孔間距離を決定する方法を概略的に示す図23を参照する。例えば、図23の方法の1つまたは動作を、システム、例えば、システム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって遂行することができる。
ブロック2302に示すように、方法は、ディスプレイ上に1つ以上の既知のまたは較正されたサイズを有する物体を表示するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、ディスプレイ130(図1)に物体2202(図22)を表示させることができる。
ブロック2304に示すように、方法は、カメラが、物体から第1の距離におよびレンズから第2の距離に配置されている間に、両方の眼鏡を通して物体の画像を取り込むステップを含むことができる。例えば、アプリケーション160(図1)は、上記したように、カメラ118(図1)に、例えば、レンズ2210および2220(図22)を介して物体2202(図22)の画像2200(図22)を取り込ませることができる一方、カメラ118(図1)は、カメラ―ディスプレイ距離にあり、レンズは、例えば上記したようにカメラ―眼鏡距離にある。
ブロック2306に示すように、方法は、各々のレンズを通して画像化された物体の画像化された中心間の距離と、レンズなしで画像化された物体の中心間の距離を決定するステップを含むことができる。例えば、アプリケーション160(図1)を、例えば、上記したように、距離2213(図22)および距離2203(図22)を決定するように構成することができる。
ブロック2308に示すように、方法は、PD計算、例えば、PD計算を可能にする1つ以上のパラメータ、例えば、各々のレンズの第1の距離、第2の距離および/または度数を、受信および/または決定するステップを含むができる。例えば、アプリケーション160(図1)は、例えば、上記したように、カメラ―ディスプレイ距離、カメラ―眼鏡距離、および/またはレンズ2210および2220(図22)の度数を受信および/または決定することができる。
ブロック2310に示すように、方法は、1つ以上のパラメータに基づいて、レンズの中心間の距離を決定するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、例えば、カメラ―眼鏡距離、カメラ―ディスプレイ距離、および/またはレンズ2210および2220(図22)の度数に基づいて、眼鏡のPDを決定することができる。
図1に戻って参照すると、いくつかの例示的な実施形態では、アプリケーション160を、例えば、後記するように、例えば、カメラ118と眼鏡との間の距離(「カメラ―レンズ距離」)を、眼鏡のレンズの間の瞳孔間距離に基づいて、決定するように構成することができる。
いくつかの例示的な実施形態による、カメラと眼鏡との間の距離を決定する方法を概略的に示す図24を参照する。例えば、図24の方法の1つまたは動作を、システム、例えば、システム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって遂行することができる。
いくつかの例示的な実施形態では、アプリケーション160(図1)は、図24の1つ以上の動作を遂行して、例えば、眼鏡のレンズの推定または事前構成された瞳孔間距離に基づいて、カメラ―レンズ距離を決定することができる。
ブロック2402に示すように、方法は、ディスプレイ上に1つ以上の既知のまたは較正されたサイズを有する物体を表示するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、ディスプレイ130(図1)に物体2202(図22)を表示させることができる。
ブロック2404に示すように、方法は、物体から第1の距離におよびレンズから第2の距離に配置されている間に、両方の眼鏡を通してカメラで物体の画像を取り込むステップを含むことができる。例えば、アプリケーション160(図1)は、上記したように、カメラ118(図1)に、例えば、レンズ2210および2220(図22)を介して物体2202(図22)の画像2200(図22)を取り込ませることができる一方、カメラ118(図1)は、カメラ―ディスプレイ距離にあり、レンズは、例えば上記したようにカメラ―眼鏡距離にある。
ブロック2406に示すように、方法は、各々のレンズを通して画像化された物体の画像化された中心間の距離と、レンズなしで画像化された物体の中心間の距離を決定するステップを含むことができる。例えば、アプリケーション160(図1)を、例えば、上記したように、距離2213(図22)および距離2203(図22)を決定するように構成することができる。
ブロック2408に示すように、方法は、1つ以上のパラメータ、例えば、眼鏡のPD、第1の距離、および/または各々のレンズの度数を受信および/または決定するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、カメラ―ディスプレイ距離、眼鏡のPD、および/またはレンズ2210および2220(図22)の度数を受信および/または決定することができる。
ブロック2410に示すように、方法は、1つ以上のパラメータに基づいて、カメラ―レンズ距離を決定するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、カメラ―ディスプレイ距離、眼鏡のPD、および/またはレンズ2210および2220(図22)の度数に基づいて、カメラ―眼鏡距離を決定することができる。
いくつかの例示的な実施形態による、レンズの1つ以上の光学パラメータを決定する方法を概略的に示す図25を参照する。例えば、図22の方法の1つまたは動作を、システム、例えば、システム100(図1)、モバイル装置、例えば、装置102(図1)、サーバ、例えば、サーバ170(図1)、ディスプレイ、例えば、ディスプレイ130(図1)および/またはアプリケーション、例えば、アプリケーション160(図1)、によって遂行することができる。
ブロック2502に示すように、方法は、レンズを介して取り込まれた物体の少なくとも1つの画像を処理するステップを含むことができる。例えば、アプリケーション160(図1)は、例えば、上記したように、ディスプレイ130(図1)上に表示された物体のレンズを介して取り込まれた少なくとも1つの画像を処理することができる。
ブロック2504に示すように、方法は、少なくとも1つの画像に基づいて、レンズの1つ以上の光学パラメータを決定するステップを含むことができる。例えば、アプリケーション160(図1)は、少なくとも1つの画像に基づいて、例えば、図1〜図21の1つ以上に関して上記したような1つ以上の動作を遂行することによって、レンズの1つ以上の光学パラメータを決定することができる。
いくつかの例示的な実施形態による、製造製品2600を概略的に示す図26を参照する。製品2600は、少なくとも1つのコンピュータプロセッサによって実行されると、少なくとも1つのコンピュータプロセッサに、装置102(図1)、サーバ170(図1)、ディスプレイ130(図1)およびまたはアプリケーション160(図1)において、1つ以上の動作を実装すること、および/または図1〜25の1つ以上の図、および/または本明細書に記載の1つ以上の動作に従って、1つ以上の処理、通信および/または機能を遂行、トリガおよび/または実装することを可能にするように、例えば、動作可能なロジック2604によって、実装されるコンピュータ実行可能命令を含むことができる、1つ以上の有形のコンピュータ可読非一時的格納媒体2302を含むことができる。「非一時的機械可読媒体」という語句は、一時的な伝搬信号のみを除いて、すべてのコンピュータ可読媒体を含むように導かれる。
いくつかの例示的な実施形態では、製品2600および/または機械可読格納媒体2602は、揮発性メモリ、不揮発性メモリ、取り外し可能または取り外し不可能なメモリ、消去可能または消去不能メモリ、書き込み可能または再書き込み可能メモリなどを含む、データを格納することができる1つ以上のタイプのコンピュータ可読格納媒体を含むことができる。例えば、機械可読格納媒体2302は、RAM、DRAM、ダブルデータレートDRAM(DDR−DRAM:double data rate dynamic random access memory)、SDRAM(Synchronousdynamic random access memory)、スタティックRAM(SRAM:staticrandom access memory)、ROM、プログラマブルROM(PROM:programmableread‐only memory)、消去可能プログラマブルROM(EPROM:erasable programmable read‐only memory)、電気的消去可能プログラマブルROM(EEPROM:electrically erasable programmable read‐only memory)、コンパクトディスクROM(CD−ROM)、コンパクトディスクレコーダブル(CD−R:Compact Disc Recordable)、コンパクトディスクリライタブル(CD−RW)、フラッシュメモリ(例えば、NORまたはNANDフラッシュメモリ)、連想メモリ(CAM:content addressable memory)、ポリマーメモリ、相変化メモリ、強誘電体メモリ、シリコン酸化物−窒化物−酸化物−シリコン(SONOS:silicon−oxide−nitride−oxide−silicon)メモリ、ディスク、フロッピーディスク、ハードドライブ、光ディスク、磁気ディスク、カード、磁気カード、光カード、テープ、カセットなどを含むことができる。コンピュータ可読格納媒体は、通信リンク、例えば、モデム、ラジオまたはネットワーク接続、を通して、搬送波または他の伝搬媒体で具体化されたデータ信号によって運ばれる遠隔コンピュータから要求コンピュータにコンピュータプログラムをダウンロードまたは転送することに伴う任意の好適な媒体を含むことができる。
いくつかの例示的な実施形態では、ロジック2604は、機械によって実行される場合、本明細書に記載される、方法、プロセスおよび/または動作を機械に遂行させる命令、データ、および/またはコードを含むことができる。機械は、例えば、任意の好適な処理プラットフォーム、コンピューティングプラットフォーム、コンピューティング装置、処理装置、コンピューティングシステム、処理システム、コンピュータ、プロセッサなどを含むことができ、ハードウェア、ソフトウェア、ファームウェア、などの任意の好適な組み合わせを使用して実装され得る。
いくつかの例示的な実施形態では、ロジック2604は、ソフトウェア、ソフトウェアモジュール、アプリケーション、プログラム、サブルーチン、命令、命令セット、コンピューティングコード、ワード、値、シンボルなどを含むことができるか、または実装され得る。命令は、ソースコード、コンパイルされたコード、インタプリタ型コード、実行可能コード、スタティックコード、ダイナミックコードなどの任意の好適なタイプのコードを含むことができる。命令を、特定の機能を遂行するようにプロセッサに命令するために、事前に定義されたコンピュータ言語、形態、または構文に従って実装することができる。命令は、C、C++、Java(登録商標)、BASIC、Matlab、Pascal、Visual BASIC、アセンブリ言語、機械コードなどの任意の好適な高レベル、低レベル、オブジェクト指向、ビジュアル、コンパイルおよび/またはインタプリタ型プログラミング言語を使用して実装することができる。
以下の実施例は、さらなる実施形態に関する。
実施例1は、少なくとも1つのコンピュータプロセッサによって実行されると、少なくとも1つのコンピュータプロセッサが、眼鏡のレンズの1つ以上の光学パラメータを決定する動作を実行することを可能にするように動作可能なコンピュータ実行命令を備える1つ以上の有形のコンピュータ可読非一時的格納媒体を含む製品を含み、動作が、レンズを介して取り込まれた物体の少なくとも1つの画像を処理するステップと、少なくとも1つの画像に基づいて、レンズの1つ以上の光学パラメータを決定するステップと、を含む。
実施例2は、実施例1に記載の対象事項を含み、任意選択で、動作が、画像内の物体の少なくとも1つの画像化された寸法と物体の少なくとも1つのそれぞれの基準寸法との間の倍率に基づいて、レンズの1つ以上の光学パラメータを決定するステップを含む。
実施例3は、実施例2に記載の対象事項を含み、任意選択で、動作が、倍率に基づいて、レンズの球面度数を決定するステップを含む。
実施例4は、実施例2または3に記載の対象事項を含み、任意選択で、動作が、画像化された寸法と基準寸法との間の倍率が最大である、画像内の複数の軸の最大倍率軸に基づいて、レンズの円柱軸を決定するステップを含む。
実施例5は、実施例4に記載の対象事項を含み、任意選択で、動作が、別の画像化された寸法と、物体の別のそれぞれの基準寸法との間の倍率が最小である、画像内の複数の軸の最大倍率軸と最小倍率軸とに基づいて、レンズの円柱度数を決定するステップを含む。
実施例6は、実施例5に記載の対象事項を含み、任意選択で、動作が、最小倍率軸における第1の倍率および最大倍率軸における第2の倍率に基づいて、レンズの円柱度数を決定するステップを含む。
実施例7は、実施例2〜6に記載のいずれか1つの対象事項を含み、任意選択で、動作が、前記倍率と、既知の寸法を有する較正物体の画像における少なくとも1つの寸法の別の倍率と、に基づいて、レンズの1つ以上の光学パラメータを決定するステップを含み、較正物体の画像が、レンズを介さずに取り込まれる。
実施例8は、実施例1〜7のいずれか1つに記載の対象事項を含み、任意選択で、画像が取り込まれたときの物体とレンズとの間の距離が、画像が取り込まれたときの物体と画像取り込み装置との間の距離の半分である。
実施例9は、実施例1〜8のいずれか1つに記載の対象事項を含み、任意選択で、動作が、画像が取り込まれたときの物体と画像取り込み装置との間の第1の距離および画像が取り込まれたときの物体とレンズとの間の第2の距離に基づいて、レンズの1つ以上の光学パラメータを決定するステップを含む。
実施例10は、実施例9に記載の対象事項を含み、任意選択で、第2の距離が、眼鏡のテンプルアームが物体の平面に延ばされたときの物体とレンズとの間の距離を含む。
実施例11は、実施例9に記載の対象事項を含み、任意選択で、動作が、第2の距離が一定である間、それぞれの複数の第1の距離でレンズを介して取り込まれた物体の複数の画像を処理するステップと、画像化された寸法と基準寸法との間の倍率が極値である複数の画像の極値倍率画像を決定するステップと、極値倍率画像に基づいて、レンズの1つ以上の光学パラメータを決定するステップと、を含む。
実施例12は、実施例9に記載の対象事項を含み、任意選択で、動作が、第1の距離が一定である間、それぞれの複数の第2の距離でレンズを介して取り込まれた物体の複数の画像を処理するステップと、画像化された寸法と基準寸法との間の倍率が極値である複数の画像の極値倍率画像を決定するステップと、極値倍率画像に基づいて、レンズの1つ以上の光学パラメータを決定するステップと、を含む。
実施例13は、実施例9〜12のいずれか1つに記載の対象事項を含み、任意選択で、動作が、画像取り込み装置の加速度に対応する加速度情報に基づいて、第1距離または第2距離のうちの少なくとも1つの距離を決定するステップを含む。
実施例14は、実施例9〜13のいずれか1つに記載の対象事項を含み、任意選択で、第1の距離または第2の距離のうちの少なくとも1つの距離が事前に定義されている。
実施例15は、実施例9〜14のいずれか1つに記載の対象事項を含み、任意選択で、動作が、物体の1つ以上の3次元(3D)座標に基づいて、第1距離を決定するステップを含む。
実施例16は、実施例9〜15のいずれか1つの対象事項を含み、任意選択で、動作が、物体と、既知の寸法を有する較正物体の画像における少なくとも1つの寸法と、に基づいて、第1の距離を決定するステップを含む。
実施例17は、実施例9〜15のいずれか1つに記載の対象事項を含み、任意選択で、動作が、第1の距離と、眼鏡のフレームの1つ以上の寸法と、に基づいて、第2の距離を決定するステップを含む。
実施例18は、実施例1〜17のいずれか1つに記載の対象事項を含み、任意選択で、1つ以上の光学パラメータを決定するステップが、眼鏡の第1のレンズと眼鏡の第2のレンズとの間の瞳孔間距離を決定するステップを含む。
実施例19は、実施例18に記載の対象事項を含み、任意選択で、動作が、第1の要素および第2の要素を含む物体の画像を処理するステップを含み、画像が、第1のレンズを介して取り込まれた第1の要素の第1の画像化された要素と、第2のレンズを介して取り込まれた第2の要素の第2の画像化された要素と、を含み、動作が、少なくとも、第1の要素と第2の要素との間の第1の距離と、第1の画像化された要素と第2の画像化された要素との間の第2の距離とに基づいて、第1のレンズと第2のレンズとの間の瞳孔間距離を決定するステップを含む。
実施例20は、実施例1〜19のいずれか1つに記載の対象事項を含み、任意選択で、動作が、物体を表示するためにディスプレイ装置をトリガするステップを含む。
実施例21は、実施例20に記載の対象事項を含み、任意選択で、動作が、ディスプレイ装置上の物体の表示サイズを較正するステップを含む。
実施例22は、実施例1〜21のいずれか1つに記載の対象事項を含み、任意選択で、物体が、円対称または回転対称の物体を含む。
実施例23は、実施例1〜22のいずれか1つに記載の対象事項を含み、任意選択で、動作が、物体の画像を取り込むための画像取り込み装置をトリガするステップを含む。
実施例24は、眼鏡のレンズの1つ以上の光学パラメータを決定するように構成されたモバイル装置を含み、モバイル装置が、レンズを介して物体の少なくとも1つの画像を取り込むカメラと、少なくとも1つの画像に基づいて、レンズの1つ以上の光学パラメータを決定するためのレンズメータモジュールとを含む。
実施例25は、実施例24に記載の対象事項を含み、任意選択で、モバイル装置が、画像内の物体の少なくとも1つの画像化された寸法と物体の少なくとも1つのそれぞれの基準寸法との間の倍率に基づいて、レンズの1つ以上の光学パラメータを決定するように構成される。
実施例26は、実施例25に記載の対象事項を含み、任意選択で、モバイル装置が、倍率に基づいて、レンズの球面度数を決定するように構成される。
実施例27は、実施例25または26に記載の対象事項を含み、任意選択で、モバイル装置が、画像化された寸法と基準寸法との間の倍率が最大である、画像内の複数の軸の最大倍率軸に基づいて、レンズの円柱軸を決定するように構成される。
実施例28は、実施例27に記載の対象事項を含み、任意選択で、モバイル装置が、別の画像化された寸法と物体の別のそれぞれの基準寸法との間の倍率が最小である、画像内の複数の軸の最大倍率軸と最小倍率軸とに基づいて、レンズの円柱度数を決定するように構成される。
実施例29は、実施例28に記載の対象事項を含み、任意選択で、モバイル装置が、最小倍率軸における第1の倍率および最大倍率軸における第2の倍率に基づいて、レンズの円柱度数を決定するように構成される。
実施例30は、実施例25〜29のいずれか1つに記載の対象事項を含み、任意選択で、モバイル装置が、前記倍率と、既知の寸法を有する較正物体の画像内のすくなくとも1つの寸法の別の倍率と、に基づいて、レンズの1つ以上の光学パラメータを決定するように構成され、較正物体の画像が、レンズを介さずに取り込まれる。
実施例31は、実施例24〜30のいずれか1つに記載の対象事項を含み、任意選択で、画像が取り込まれたときの物体とレンズとの間の距離が、画像が取り込まれたときの物体とカメラとの間の距離の半分である。
実施例32は、実施例24〜31のいずれか1つに記載の対象事項を含み、任意選択で、モバイル装置は、画像が取り込まれたときの物体とカメラとの間の第1の距離と、画像が取り込まれたときの物体とレンズとの間の第2の距離とに基づいて、レンズの1つ以上の光学パラメータを決定するように構成される。
実施例33は、実施例32に記載の対象事項を含み、任意選択で、第2の距離が、眼鏡のテンプルアームが物体の平面に延ばされるとき、物体とレンズとの間の距離を含む。
実施例34は、実施例32に記載の対象事項を含み、任意選択で、モバイル装置は、第2の距離が一定である間、それぞれの複数の第1の距離でレンズを介して取り込まれた物体の複数の画像を処理し、画像化された寸法と基準寸法との間の倍率が極値である複数の画像の極値倍率画像を決定し、極値倍率画像に基づいて、レンズの1つ以上の光学パラメータを決定するように構成される。
実施例35は、実施例32に記載の対象事項を含み、任意選択で、モバイル装置が、第1の距離が一定である間、それぞれの複数の第2の距離でレンズを介して取り込まれた物体の複数の画像を処理し、画像化された寸法と基準寸法との間の倍率が極値である複数の画像の極値倍率画像を決定し、極値倍率画像に基づいて、レンズの1つ以上の光学パラメータを決定するように構成される。
実施例36は、実施例32〜35のいずれか1つに記載の対象事項を含み、任意選択で、モバイル装置が、モバイル装置の加速度に対応する加速度情報に基づいて、第1の距離または第2の距離のうちの少なくとも1つの距離を決定するステップを含む。
実施例37は、実施例32〜36のいずれか1つに記載の対象事項を含み、任意選択で、第1の距離または第2の距離のうちの少なくとも1つの距離が事前に定義されている。
実施例38は、実施例32〜37のいずれか1つに記載の対象事項を含み、任意選択で、モバイル装置が、物体の1つ以上の3次元(3D)座標に基づいて、第1の距離を決定するように構成される。
実施例39は、実施例32〜38のいずれか1つに記載の対象事項を含み、任意選択で、モバイル装置が、物体と、既知の寸法を有する較正物体の画像における少なくとも1つの寸法と、に基づいて、第1の距離を決定するように構成される。
実施例40は、実施例32〜38のいずれか1つに記載の対象事項を含み、任意選択で、モバイル装置が、第1の距離と、眼鏡のフレームの1つ以上の寸法とに基づいて第2の距離を決定するように構成される。
実施例41は、実施例24〜40のいずれか1つに記載の対象事項を含み、任意選択で、1つ以上の光学パラメータを決定するステップが、眼鏡の第1のレンズと眼鏡の第2のレンズとの間の瞳孔間距離を決定するステップを含む。
実施例42は、実施例41に記載の対象事項を含み、任意選択で、第1の要素および第2の要素を含む物体の画像を処理するステップを含み、画像が、第1のレンズを介して取り込まれた第1の要素の第1の画像化された要素と、第2のレンズを介して取り込まれた第2の要素の第2の画像化された要素と、を含み、動作が、少なくとも、第1の要素と第2の要素との間の第1の距離と、第1の画像化された要素と第2の画像化された要素との間の第2の距離とに基づいて、第1のレンズと第2のレンズとの間の瞳孔間距離を決定するステップを含む。
実施例43は、実施例24〜42のいずれか1つに記載の対象事項を含み、任意選択で、モバイル装置が、物体を表示するためにディスプレイ装置をトリガするように構成される。
実施例44は、実施例43の対象事項を含み、任意選択で、モバイル装置が、ディスプレイ装置上の物体の表示サイズを較正するように構成される。
実施例45は、実施例24〜44のいずれか1つに記載の対象事項を含み、任意選択で、物体が、円対称または回転対称の物体を含む。
実施例46は、実施例24〜45のいずれか1つに記載の対象事項を含み、任意選択で、モバイル装置が、物体の画像を取り込むためのカメラをトリガするように構成される。
実施例47は、眼鏡のレンズの1つ以上の光学パラメータを決定する方法を含み、方法が、レンズを介して取り込まれた物体の少なくとも1つの画像を処理するステップと、少なくとも1つの画像に基づいて、レンズの1つ以上の光学パラメータを決定するステップと、を含む。
実施例48は、実施例47に記載の対象事項を含み、任意選択で、画像内の物体の少なくとも1つの画像化された寸法と物体の少なくとも1つのそれぞれの基準寸法との間の倍率に基づいて、レンズの1つ以上の光学パラメータを決定するステップを含む。
実施例49は、実施例48に記載の対象事項を含み、任意選択で、倍率に基づいて、レンズの球面度数を決定するステップを含む。
実施例50は、実施例48または49に記載の対象事項を含み、任意選択で、画像化された寸法と基準寸法との間の倍率が最大である、画像内の複数の軸の最大倍率軸に基づいて、レンズの円柱軸を決定するステップを含む。
実施例51は、実施例50に記載の対象事項を含み、任意選択で、物体の別の画像化された寸法と別のそれぞれの基準寸法との間の倍率が最小である、画像内の複数の軸の最大倍率軸と最小倍率軸とに基づいて、レンズの円柱度数を決定するステップを含む。
実施例52は、実施例51の対象事項を含み、任意選択で、最小倍率軸における第1の倍率および最大倍率軸における第2の倍率に基づいて、レンズの円柱度数を決定するステップを含む。
実施例53は、実施例48〜52に記載の対象事項を含み、任意選択で、前記倍率と、既知の寸法を有する較正物体の画像における少なくとも1つの寸法の別の倍率と、に基づいて、レンズの1つ以上の光学パラメータを決定するステップを含み、較正物体の画像が、レンズを介さずに取り込まれる。
実施例54は、実施例47〜53に記載のいずれか1つの対象事項を含み、任意選択で、画像が取り込まれたときの物体とレンズとの間の距離が、画像が取り込まれたときの物体と画像取り込み装置との間の距離の半分である。
実施例55は、実施例47〜54に記載のいずれか1つの対象事項を含み、任意選択で、画像が取り込まれたときの物体と画像取り込み装置との間の第1の距離と、画像が取り込まれたときの物体とレンズとの間の第2の距離とに基づいて、レンズの1つ以上の光学パラメータを決定するステップを含む。
実施例56は、実施例55に記載の対象事項を含み、任意選択で、第2の距離が、眼鏡のテンプルアームが物体の平面に延ばされるとき、物体とレンズとの間の距離を含む。
実施例57は、実施例55に記載の対象事項を含み、任意選択で、第2の距離が一定である間、それぞれの複数の第1の距離でレンズを介して取り込まれた物体の複数の画像を処理するステップと、画像化された寸法と基準寸法との間の倍率が極値である複数の画像の極値倍率画像を決定するステップと、極値倍率画像に基づいてレンズの1つ以上の光学パラメータを決定するステップと、を含む。
実施例58は、実施例55に記載の対象事項を含み、任意選択で、動作が、第1の距離が一定である間、それぞれの複数の第2の距離でレンズを介して取り込まれた物体の複数の画像を処理するステップと、画像化された寸法と基準寸法との間の倍率が極値である複数の画像の極値倍率画像を決定するステップと、極値倍率画像に基づいてレンズの1つ以上の光学パラメータを決定するステップと、を含む。
実施例59は、実施例55〜58のいずれか1つに記載の対象事項を含み、任意選択で、画像取り込み装置の加速度に対応する加速度情報に基づいて、第1の距離または第2の距離のうちの少なくとも1つの距離を決定するステップを含む。
実施例60は、実施例55〜59のいずれか1つに記載の対象事項を含み、任意選択で、第1の距離または第2の距離のうちの少なくとも1つの距離が事前に定義されている。
実施例61は、実施例55〜60のいずれか1つに記載の対象事項を含み、任意選択で、物体の1つ以上の3次元(3D)座標に基づいて、第1の距離を決定するステップを含む。
実施例62は、実施例55〜61のいずれか1つに記載の対象事項を含み、任意選択で、物体と、既知の寸法を有する較正物体の画像における少なくとも1つの寸法と、に基づいて、第1の距離を決定するステップを含む。
実施例63は、実施例55〜61のいずれか1つに記載の対象事項を含み、任意選択で、第1の距離と、眼鏡のフレームの1つ以上の寸法とに基づいて第2の距離を決定するステップを含む。
実施例64は、実施例47〜63のいずれか1つに記載の対象事項を含み、任意選択で、1つ以上の光学パラメータを決定するステップが、眼鏡の第1のレンズと眼鏡の第2のレンズとの間の瞳孔間距離を決定するステップを含む。
実施例65は、実施例64に記載の対象事項を含み、任意選択で、第1の要素および第2の要素を含む物体の画像を処理するステップを含み、画像が、第1のレンズを介して取り込まれた第1の要素の第1の画像化された要素と、第2のレンズを介して取り込まれた第2の要素の第2の画像化された要素と、を含み、動作が、少なくとも、第1の要素と第2の要素との間の第1の距離と、第1の画像化された要素と第2の画像化された要素との間の第2の距離とに基づいて、第1のレンズと第2のレンズとの間の瞳孔間距離を決定するステップを含む。
実施例66は、実施例47〜65のいずれか1つに記載の対象事項を含み、任意選択で、物体を表示するためにディスプレイ装置をトリガするステップを含む。
実施例67は、実施例66に記載の対象事項を含み、任意選択で、ディスプレイ装置上の物体の表示サイズを較正するステップを含む。
実施例68は、実施例47〜67のいずれか1つに記載の対象事項を含み、任意選択で、物体が、円対称または回転対称の物体を含む。
実施例69は、実施例47〜68のいずれか1つに記載の対象事項を含み、任意選択で、物体の画像を取り込むための画像取り込み装置をトリガするステップを含む。
実施例70は、眼鏡のレンズの1つ以上の光学パラメータを決定する機器を含み、機器が、レンズを介して取り込まれた物体の少なくとも1つの画像を処理する手段と、少なくとも1つの画像に基づいて、レンズの1つ以上の光学パラメータを決定する手段と、を含む。
実施例71は、実施例70に記載の対象事項を含み、任意選択で、画像内の物体の少なくとも1つの画像化された寸法と物体の少なくとも1つのそれぞれの基準寸法との間の倍率に基づいて、レンズの1つ以上の光学パラメータを決定する手段を含む。
実施例72は、実施例71に記載の対象事項を含み、任意選択で、倍率に基づいて、レンズの球面度数を決定する手段を含む。
実施例73は、実施例71または72に記載の対象事項を含み、任意選択で、画像化された寸法と基準寸法との間の倍率が最大である、画像内の複数の軸の最大倍率軸に基づいて、レンズの円柱軸を決定する手段を含む。
実施例74は、実施例73に記載の対象事項を含み、任意選択で、物体の別の画像化された寸法と別のそれぞれの基準寸法との間の倍率が最小である、画像内の複数の軸の最大倍率軸と最小倍率軸とに基づいて、レンズの円柱度数を決定する手段を含む。
実施例75は、実施例74に記載の対象事項を含み、任意選択で、最小倍率軸における第1の倍率および最大倍率軸における第2の倍率に基づいて、レンズの円柱度数を決定する手段を含む。
実施例76は、実施例71〜75のいずれか1つに記載の対象事項を含み、任意選択で、前記倍率と、既知の寸法を有する較正物体の画像における少なくとも1つの寸法の別の倍率と、に基づいて、レンズの1つ以上の光学パラメータを決定する手段を含み、較正物体の画像が、レンズを介さずに取り込まれる。
実施例77は、実施例70〜76のいずれか1つに記載の対象事項を含み、任意選択で、画像が取り込まれたときの物体とレンズとの間の距離が、画像が取り込まれたときの物体と画像取り込み装置との間の距離の半分である。
実施例78は、実施例70〜77のいずれか1つに記載の対象事項を含み、任意選択で、画像が取り込まれたときの物体と画像取り込み装置との間の第1の距離と、画像が取り込まれたときの物体とレンズとの間の第2の距離とに基づいて、レンズの1つ以上の光学パラメータを決定する手段を含む。
実施例79は、実施78に記載の対象事項を含み、任意選択で、第2の距離が、眼鏡のテンプルアームが物体の平面に延ばされるとき、物体とレンズとの間の距離を含む。
実施例80は、実施例78に記載の対象事項を含み、任意選択で、第2の距離が一定である間、それぞれの複数の第1の距離でレンズを介して取り込まれた物体の複数の画像を処理し、画像化された寸法と基準寸法との間の倍率が極値である複数の画像の極値倍率画像を決定し、極値倍率画像に基づいてレンズの1つ以上の光学パラメータを決定する手段を含む。
実施例81は、実施例78に記載の対象事項を含み、任意選択で、第1の距離が一定である間、それぞれの複数の第2の距離でレンズを介して取り込まれた物体の複数の画像を処理し、画像化された寸法と基準寸法との間の倍率が極値である複数の画像の極値倍率画像を決定し、極値倍率画像に基づいてレンズの1つ以上の光学パラメータを決定する手段を含む。
実施例82は、実施例78〜81のいずれか1つに記載の対象事項を含み、任意選択で、画像取り込み装置の加速度に対応する加速度情報に基づいて、第1の距離または第2の距離のうちの少なくとも1つの距離を決定する手段を含む。
実施例83は、実施例78〜82のいずれか1つに記載の対象事項を含み、任意選択で、第1の距離または第2の距離のうちの少なくとも1つの距離が事前に定義されている。
実施例84は、実施例78〜83のいずれか1つに記載の対象事項を含み、任意選択で、物体の1つ以上の3次元(3D)座標に基づいて、第1の距離を決定する手段を含む。
実施例85は、実施例78〜84のいずれか1つに記載の対象事項を含み、任意選択で、物体と、既知の寸法を有する較正物体の画像における少なくとも1つの寸法と、に基づいて、第1の距離を決定する手段を含む。
実施例86は、実施例78〜84のいずれか1つに記載の対象事項を含み、任意選択で、第1の距離と、眼鏡のフレームの1つ以上の寸法とに基づいて第2の距離を決定する手段を含む。
実施例87は、実施例70〜86のいずれか1つに記載の対象事項を含み、任意選択で、1つ以上の光学パラメータを決定するステップが、眼鏡の第1のレンズと眼鏡の第2のレンズとの間の瞳孔間距離を決定するステップを含む。
実施例88は、実施例87に記載の対象事項を含み、任意選択で、第1の要素および第2の要素を含む物体の画像を処理する手段を含み、画像が、第1のレンズを介して取り込まれた第1の要素の第1の画像化された要素と、第2のレンズを介して取り込まれた第2の要素の第2の画像化された要素と、を含み、動作が、少なくとも、第1の要素と第2の要素との間の第1の距離と、第1の画像化された要素と第2の画像化された要素との間の第2の距離とに基づいて、第1のレンズと第2のレンズとの間の瞳孔間距離を決定するステップを含む。
実施例89は、実施例70〜88に記載のいずれか1つの対象事項を含み、任意選択で、物体を表示するためにディスプレイ装置をトリガする手段を含む。
実施例90は、実施例89に記載の対象事項を含み、任意選択で、ディスプレイ装置上の物体の表示サイズを較正する手段を含む。
実施例91は、実施例70〜90のいずれか1つに記載の対象事項を含み、任意選択で、物体が、円対称または回転対称の物体を含む。
実施例92は、実施例70〜91のいずれか1つに記載の対象事項を含み、任意選択で、物体の画像を取り込むための画像取り込み装置をトリガする手段を含む。
1つ以上の実施形態を参照して本明細書で記載される機能、動作、構成要素および/または形体を、1つ以上の他の実施形態を参照して本明細書に記載され、またはその逆の、1つ以上の他の機能、動作、構成要素、および/または形体と結合することができ、または結合させて利用することができる。
本明細書では特定の形体を例示し記載してきたが、多くの変更、置換、変化、および均等物が当業者には想到されるであろう。したがって、添付の特許請求の範囲は、本開示の真の趣旨に含まれるすべてのそのような変更および変化を包含するように意図されていることが理解されるべきである。