JP6848794B2 - 衝突回避支援装置 - Google Patents
衝突回避支援装置 Download PDFInfo
- Publication number
- JP6848794B2 JP6848794B2 JP2017189290A JP2017189290A JP6848794B2 JP 6848794 B2 JP6848794 B2 JP 6848794B2 JP 2017189290 A JP2017189290 A JP 2017189290A JP 2017189290 A JP2017189290 A JP 2017189290A JP 6848794 B2 JP6848794 B2 JP 6848794B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- avoidance
- route
- collision
- obstacle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000004044 response Effects 0.000 claims description 12
- 238000001514 detection method Methods 0.000 claims description 7
- 230000004048 modification Effects 0.000 description 13
- 238000012986 modification Methods 0.000 description 13
- 230000008859 change Effects 0.000 description 11
- 230000001133 acceleration Effects 0.000 description 8
- 102100022840 DnaJ homolog subfamily C member 7 Human genes 0.000 description 7
- 101000903053 Homo sapiens DnaJ homolog subfamily C member 7 Proteins 0.000 description 7
- 101000847024 Homo sapiens Tetratricopeptide repeat protein 1 Proteins 0.000 description 7
- 102100032841 Tetratricopeptide repeat protein 1 Human genes 0.000 description 7
- 230000007246 mechanism Effects 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000000881 depressing effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000010720 hydraulic oil Substances 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000010485 coping Effects 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0953—Predicting travel path or likelihood of collision the prediction being responsive to vehicle dynamic parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0097—Predicting future conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/025—Active steering aids, e.g. helping the driver by actively influencing the steering system after environment evaluation
- B62D15/0265—Automatic obstacle avoidance by steering
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0055—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot with safety arrangements
- G05D1/0061—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot with safety arrangements for transition from automatic pilot to manual pilot and vice versa
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- G05D1/227—
-
- G05D1/646—
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/165—Anti-collision systems for passive traffic, e.g. including static obstacles, trees
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/02—Active or adaptive cruise control system; Distance control
- B60T2201/022—Collision avoidance systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
- B60W2520/105—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
- G01S13/867—Combination of radar systems with cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9318—Controlling the steering
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/93185—Controlling the brakes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9319—Controlling the accelerator
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
Description
自車両の前方に存在する障害物を検出する障害物検出手段(14,71)と、
自車両が前記障害物と衝突する可能性が高い場合に、自車両のドライバーに対して警報を発する警報手段(S52,S53)と、
自車両が前記障害物と衝突する可能性が高い場合に、車輪に制動力を発生させる自動ブレーキ制御(S62,S63)と、自車両と前記障害物との衝突を回避するための回避経路に沿って自車両が走行するように自車両の進行方向を変化させる自動偏向制御(S72,S73)とを含んだ衝突回避支援制御を実施する衝突回避支援制御手段(10)と、
前記回避経路を演算する回避経路演算手段(S32)と
を備えた衝突回避支援装置であって、
自車両が前記回避経路を走行して自車両と前記障害物との衝突が回避されると推定される位置を前記回避経路の終端位置(Pe)として、自車両が前記終端位置を通過してから設定時間(Td)が経過するまでの自車両の推定経路である回避後経路を演算する回避後経路演算手段(S33〜S36)と、
自車両が前記回避後経路を走行した場合に、自車両と衝突する可能性が高い新たな障害物が存在するか否かについて判定する回避後経路衝突判定手段(S37)と、
自車両が前記回避後経路を走行した場合に、自車両と衝突する可能性が高い新たな障害物が存在すると判定される場合には、前記自動偏向制御の実施を禁止する禁止手段(S38,S40)と
を備えたことにある。
前記警報手段による警報が開始されてからドライバーが衝突回避用運転操作を開始できるまでの推定時間であるドライバー応答必要時間(Treq)を記憶し、前記ドライバー応答必要時間から、前記警報手段による警報の開始から自車両が前記終端位置を通過するまでの時間(Tpcs)を減算した残時間Td(=Treq−Tpcs)を算出し、前記算出した残時間を前記設定時間に設定する設定時間演算手段(S34,S35)を備えたことにある。
前記設定時間は、自車両が前記終端位置を通過してから新たな障害物に対する衝突回避支援制御を開始できるまでの時間である支援制御引き渡し時間(Tc)に基づいて設定されていることにある。
前記回避後経路演算手段は、自車両が前記終端位置を通過するときの車速および偏向角で前記設定時間だけ空走する推定経路を前記回避後経路として演算するように構成されたことにある。
前記回避後経路演算手段は、自車両が前記終端位置を通過するときの偏向角で、所定の減速度で前記設定時間だけ減速走行する推定経路を前記回避後経路として演算するように構成されたことにある。
TTC=L/Vr ・・・(1)
この衝突予測時間TTCは、自車両が障害物と衝突する可能性の高さを表す指標値として用いられる。衝突予測時間TTCが短いほど、自車両が障害物に衝突する可能性が高いと判断することができる。衝突判定部15は、この衝突予測時間TTCが予め設定した衝突判定閾値以下である場合に、自車両が障害物に衝突する可能性が高いと判定する。尚、衝突予測時間TTCは、相対速度Vrが自車両と障害物とが互いに遠ざかる方向の速度を示す場合には、無限大(∞)である。
X=V・t+(1/2)・a・t2 ・・・(2)
また、車両停止までの時間tは、次式(3)にて表すことができる。
t=−V/a ・・・(3)
従って、(2)式に(3)式を代入することにより、自車両を走行距離Dで停止させるために必要となる減速度aは、次式(4)にて表すことができる。
a=−V2/2D ・・・(4)
障害物から距離βだけ手前(自車両側に離れた位置)で自車両を停止させるためには、この走行距離Dを、周囲センサ51によって検出されている距離Lから距離βだけ引いた距離(L−β)に設定すればよい。尚、障害物が移動している場合には、減速度aは、車速Vに代えて相対速度Vrを用いて計算すればよい。
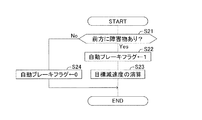
上記の実施形態においては、自動ブレーキ制御は、自車両と障害物との衝突が回避されたときに終了条件が成立するが、それに代えて、自車両が停止(車速がゼロ)するまで継続される構成であってもよい。その場合、支援ECU10は、ステップS36における回避後経路の演算にあたっては、自動操舵制御が終了した時点(自車両が回避区間の終端位置を通過した時点)の偏向角を維持して、ドライバー返却区間走行時間Tdのあいだ、ステップS23で演算された目標減速度にて自車両が減速走行した場合の自車両の推定経路を演算する。この場合には、実施形態に比べて、ドライバー返却区間が短くなり(換言すれば、回避後経路が短くなり)、二次衝突の発生を更に低減することができる。
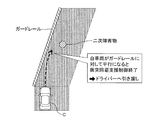
上記の実施形態においては、衝突回避支援制御(自動ブレーキ制御および自動操舵制御)は、その終了後においては、所定の開始許可条件が成立するまでの間は再開されない。このため、実施形態においては、衝突回避支援制御が終了すると、運転操作がドライバーに委ねられる(引き渡される)ものとしている。衝突回避支援制御が終了しても、早い段階で、次の二次障害物に対する衝突回避支援制御を再開することができる構成の場合には、衝突回避支援制御が終了した後は、操舵回避動作が、次の衝突回避支援制御に引き渡されるものとすることができる。但し、最初の衝突回避支援制御が終了してから、二次障害物に対する次の衝突回避制御(自動ブレーキ制御および自動操舵制御)を開始できるまでの遅れ時間(支援制御引き渡し時間Tcと呼ぶ)が発生する。そこで、この変形例2では、支援ECU10は、実施形態におけるドライバー返却区間走行時間に代えて、支援制御引き渡し時間を用いて回避後経路を演算する。
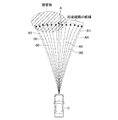
本実施形態においては、1つの回避経路が演算されるが、複数の回避経路が演算される構成を採用することができる。この場合、支援ECU10は、それぞれの回避経路毎に、回避後経路を演算し、それぞれの回避後経路毎に二次障害物との衝突を判定する。支援ECU10は、二次障害物と衝突するおそれのない回避後経路が存在する場合には、その回避後経路に繋がる回避経路を選択して、自動操舵制御を行う回避経路に設定する。
また、回避後経路の演算に当たっては、実施形態と変形例2とを組み合わせて実施することもできる。例えば、支援ECU10は、ドライバー返却区間走行時間Tdと、支援制御引き渡し時間Tcとの両方を演算し、短い方の時間を採用して回避後経路を演算してもよい。つまり、支援ECU10は、ドライバー返却区間走行時間Tdが支援制御引き渡し時間Tcよりも短ければ、ドライバー返却区間走行時間Tdに基づいて回避後経路を演算し、支援制御引き渡し時間Tcがドライバー返却区間走行時間Tdよりも短ければ、支援制御引き渡し時間Tcに基づいて回避後経路を演算する。
本実施形態においては、自動操舵制御により(操舵角の制御により)自車両の向きを変えるが、それに代えて、左右輪の制動力差を使った制動力差制御により自車両の向きを変えるようにしてもよい。制動力差制御は、左輪(前後輪、あるいは、前後何れか一方輪)の摩擦ブレーキ機構32で発生させる制動力と、右輪(前後輪、あるいは、前後何れか一方輪)の摩擦ブレーキ機構32で発生させる制動力との差をつけることによりにより、自車両の向きを変える制御である。従って、本発明の自動偏向制御は、自動操舵制御に限らず制動力差制御も採用することができる。
Claims (5)
- 自車両の前方に存在する障害物を検出する障害物検出手段と、
自車両が前記障害物と衝突する可能性が高い場合に、自車両のドライバーに対して警報を発する警報手段と、
自車両が前記障害物と衝突する可能性が高い場合に、車輪に制動力を発生させる自動ブレーキ制御と、自車両と前記障害物との衝突を回避するための回避経路に沿って自車両が走行するように自車両の進行方向を変化させる自動偏向制御とを含んだ衝突回避支援制御を実施する衝突回避支援制御手段と、
前記回避経路を演算する回避経路演算手段と
を備えた衝突回避支援装置であって、
自車両が前記回避経路を走行して自車両と前記障害物との衝突が回避されると推定される位置を前記回避経路の終端位置として、自車両が前記終端位置を通過してから設定時間が経過するまでの自車両の推定経路である回避後経路を演算する回避後経路演算手段と、
自車両が前記回避後経路を走行した場合に、自車両と衝突する可能性が高い新たな障害物が存在するか否かについて判定する回避後経路衝突判定手段と、
自車両が前記回避後経路を走行した場合に、自車両と衝突する可能性が高い新たな障害物が存在すると判定される場合には、前記自動偏向制御の実施を禁止する禁止手段と
を備えた衝突回避支援装置。 - 請求項1記載の衝突回避支援装置において、
前記警報手段による警報が開始されてからドライバーが衝突回避用運転操作を開始できるまでの推定時間であるドライバー応答必要時間を記憶し、前記ドライバー応答必要時間から、前記警報手段による警報の開始から自車両が前記終端位置を通過するまでの時間を減算した残時間を算出し、前記算出した残時間を前記設定時間に設定する設定時間演算手段を備えた衝突回避支援装置。 - 請求項1記載の衝突回避支援装置において、
前記設定時間は、自車両が前記終端位置を通過してから新たな障害物に対する衝突回避支援制御を開始できるまでの時間である支援制御引き渡し時間に基づいて設定されている衝突回避支援装置。 - 請求項1ないし請求項3の何れか一項記載の衝突回避支援装置において、
前記回避後経路演算手段は、自車両が前記終端位置を通過するときの車速および偏向角で前記設定時間だけ空走する推定経路を前記回避後経路として演算するように構成された衝突回避支援装置。 - 請求項1ないし請求項3の何れか一項記載の衝突回避支援装置において、
前記回避後経路演算手段は、自車両が前記終端位置を通過するときの偏向角で、所定の減速度で前記設定時間だけ減速走行する推定経路を前記回避後経路として演算するように構成された衝突回避支援装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017189290A JP6848794B2 (ja) | 2017-09-29 | 2017-09-29 | 衝突回避支援装置 |
| DE102018124031.7A DE102018124031B4 (de) | 2017-09-29 | 2018-09-28 | Kollisionsvermeidungsassistenzvorrichtung |
| US16/145,821 US10882518B2 (en) | 2017-09-29 | 2018-09-28 | Collision avoidance assist apparatus |
| CN201811146887.XA CN109591813B (zh) | 2017-09-29 | 2018-09-29 | 碰撞避免辅助装置 |
| US17/130,595 US11897459B2 (en) | 2017-09-29 | 2020-12-22 | Collision avoidance assist apparatus |
| US17/514,942 US11897462B2 (en) | 2017-09-29 | 2021-10-29 | Collision avoidance assist apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017189290A JP6848794B2 (ja) | 2017-09-29 | 2017-09-29 | 衝突回避支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019064336A JP2019064336A (ja) | 2019-04-25 |
| JP6848794B2 true JP6848794B2 (ja) | 2021-03-24 |
Family
ID=65728127
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017189290A Active JP6848794B2 (ja) | 2017-09-29 | 2017-09-29 | 衝突回避支援装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (3) | US10882518B2 (ja) |
| JP (1) | JP6848794B2 (ja) |
| CN (1) | CN109591813B (ja) |
| DE (1) | DE102018124031B4 (ja) |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107614349B (zh) * | 2015-06-03 | 2018-10-09 | 日产自动车株式会社 | 车辆控制装置及车辆控制方法 |
| US10460534B1 (en) | 2015-10-26 | 2019-10-29 | Allstate Insurance Company | Vehicle-to-vehicle accident detection |
| JP6848794B2 (ja) | 2017-09-29 | 2021-03-24 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| KR102005900B1 (ko) * | 2017-11-30 | 2019-08-01 | 주식회사 만도 | 차량의 전방 및 측방 충돌 가능성을 기초로 어시스트 토크를 조정하는 전동식 조향 장치 및 방법 |
| KR102417398B1 (ko) * | 2017-12-15 | 2022-07-06 | 현대자동차주식회사 | 회피 후 안정화방식 샤시통합제어 방법 및 차량 |
| US10816985B2 (en) * | 2018-04-17 | 2020-10-27 | Baidu Usa Llc | Method on moving obstacle representation for trajectory planning |
| JP7149121B2 (ja) * | 2018-07-10 | 2022-10-06 | 日立Astemo株式会社 | 車両制御装置、車両制御方法及び車両制御システム |
| US11059479B2 (en) * | 2018-10-08 | 2021-07-13 | Mando Corporation | Collision avoidance apparatus and collision avoidance method |
| KR101964858B1 (ko) * | 2018-10-08 | 2019-08-13 | 주식회사 만도 | 충돌 방지 장치 및 충돌 방지 방법 |
| US11185003B2 (en) * | 2019-04-03 | 2021-11-30 | Caterpillar Inc. | Tipping avoidance system and method |
| JP7115415B2 (ja) * | 2019-05-14 | 2022-08-09 | トヨタ自動車株式会社 | 車両運転支援装置 |
| JP2021004602A (ja) * | 2019-06-25 | 2021-01-14 | 博之 神沢 | 動力停止装置 |
| CN110320910B (zh) | 2019-07-01 | 2023-10-10 | 阿波罗智能技术(北京)有限公司 | 车辆的避让控制方法、装置、电子设备与存储介质 |
| JP7200871B2 (ja) * | 2019-07-25 | 2023-01-10 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| CN110588510B (zh) | 2019-08-26 | 2021-09-07 | 华为技术有限公司 | 一种对本车的预警方法及装置 |
| KR20210042188A (ko) * | 2019-10-08 | 2021-04-19 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| JP7272228B2 (ja) | 2019-10-11 | 2023-05-12 | 株式会社デンソー | 車両用運転支援装置及び車両用運転支援方法 |
| JP7268612B2 (ja) * | 2020-01-20 | 2023-05-08 | トヨタ自動車株式会社 | 運転支援装置 |
| JP7055825B2 (ja) * | 2020-01-27 | 2022-04-18 | 本田技研工業株式会社 | 車両挙動制御装置及び車両挙動制御方法 |
| WO2021229790A1 (ja) * | 2020-05-15 | 2021-11-18 | 日産自動車株式会社 | 車両制御方法及び車両制御装置 |
| CN111619558A (zh) * | 2020-06-09 | 2020-09-04 | 江西科技学院 | 用于避免机动车与错误行驶车辆碰撞的方法以及检测装置 |
| JP7470588B2 (ja) * | 2020-07-16 | 2024-04-18 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| WO2022044885A1 (ja) * | 2020-08-25 | 2022-03-03 | 株式会社デンソー | 走行支援装置 |
| CN111976721B (zh) * | 2020-09-02 | 2022-11-22 | 湖北汽车工业学院 | 一种基于矩形聚类碰撞锥模型的主动避障控制方法 |
| KR102370138B1 (ko) * | 2020-09-09 | 2022-03-04 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| JP2022052260A (ja) * | 2020-09-23 | 2022-04-04 | 株式会社アドヴィックス | 車両の旋回制御装置、及び、車両の旋回制御プログラム |
| JP2022060076A (ja) * | 2020-10-02 | 2022-04-14 | 株式会社Subaru | 車両の走行制御装置 |
| DE102020214571A1 (de) * | 2020-11-19 | 2022-05-19 | Zf Friedrichshafen Ag | Verfahren sowie Steuergerät zum Steuern eines Kraftfahrzeugs |
| JP2022111506A (ja) * | 2021-01-20 | 2022-08-01 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2022113287A (ja) * | 2021-01-25 | 2022-08-04 | トヨタ自動車株式会社 | 車両衝突回避支援装置 |
| CN113650607B (zh) * | 2021-07-20 | 2023-06-06 | 江铃汽车股份有限公司 | 一种低速场景自动驾驶方法、系统及汽车 |
| CN114407879B (zh) * | 2022-01-17 | 2023-06-02 | 常州信息职业技术学院 | 一种适用于自动驾驶的应急转向控制系统及控制方法 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4163205B2 (ja) * | 2005-11-15 | 2008-10-08 | 三菱電機株式会社 | 車両衝突軽減装置 |
| JP4923766B2 (ja) * | 2006-06-13 | 2012-04-25 | 日産自動車株式会社 | 車両用制動力制御装置 |
| JP4270259B2 (ja) * | 2006-10-05 | 2009-05-27 | 日産自動車株式会社 | 障害物回避制御装置 |
| US8560157B2 (en) * | 2007-09-19 | 2013-10-15 | Topcon Positioning Systems, Inc. | Partial manual control state for automated vehicle navigation system |
| EP2763120B1 (en) * | 2011-09-26 | 2017-12-27 | Toyota Jidosha Kabushiki Kaisha | Vehicle driving assistance system |
| DE102012208712A1 (de) * | 2012-05-24 | 2013-11-28 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Vermeiden oder Abmildern einer Kollision eines Fahrzeugs mit einem Hindernis |
| CN103072575B (zh) * | 2013-01-18 | 2016-03-30 | 浙江吉利汽车研究院有限公司杭州分公司 | 一种车辆主动防碰撞方法 |
| DE102013001228A1 (de) * | 2013-01-25 | 2014-07-31 | Wabco Gmbh | Verfahren zum Ermitteln eines Auslösekriteriums für eine Bremsung und Notbremssystem für ein Fahrzeug |
| KR20140126975A (ko) * | 2013-04-24 | 2014-11-03 | 주식회사 만도 | 차량의 충돌 회피 장치 및 방법 |
| EP2916190B1 (en) * | 2014-03-04 | 2019-05-08 | Volvo Car Corporation | Apparatus and method for prediction of time available for autonomous driving, in a vehicle having autonomous driving cap |
| JP2016084092A (ja) * | 2014-10-28 | 2016-05-19 | 富士重工業株式会社 | 車両の走行制御装置 |
| US9834224B2 (en) * | 2015-10-15 | 2017-12-05 | International Business Machines Corporation | Controlling driving modes of self-driving vehicles |
| US20170106857A1 (en) * | 2015-10-20 | 2017-04-20 | GM Global Technology Operations LLC | Vehicle collision system and method of using the same |
| JP6387948B2 (ja) * | 2015-12-11 | 2018-09-12 | トヨタ自動車株式会社 | 車両の運転支援装置 |
| DE102015016531A1 (de) * | 2015-12-18 | 2017-06-22 | Adam Opel Ag | Fahrerassistenzsystem und Verfahren zur Kollisionsvermeidung |
| JP2017134520A (ja) * | 2016-01-26 | 2017-08-03 | トヨタ自動車株式会社 | 車両用衝突回避支援システム |
| JP6361666B2 (ja) * | 2016-01-26 | 2018-07-25 | トヨタ自動車株式会社 | 車両用衝突回避支援システム |
| CN108778801B (zh) * | 2016-03-16 | 2021-10-01 | 本田技研工业株式会社 | 车辆控制系统 |
| US10282995B2 (en) * | 2017-09-05 | 2019-05-07 | Starship Technologies Oü | Mobile robot having collision avoidance system for crossing a road from a pedestrian pathway |
| JP6848794B2 (ja) | 2017-09-29 | 2021-03-24 | トヨタ自動車株式会社 | 衝突回避支援装置 |
-
2017
- 2017-09-29 JP JP2017189290A patent/JP6848794B2/ja active Active
-
2018
- 2018-09-28 US US16/145,821 patent/US10882518B2/en active Active
- 2018-09-28 DE DE102018124031.7A patent/DE102018124031B4/de active Active
- 2018-09-29 CN CN201811146887.XA patent/CN109591813B/zh active Active
-
2020
- 2020-12-22 US US17/130,595 patent/US11897459B2/en active Active
-
2021
- 2021-10-29 US US17/514,942 patent/US11897462B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN109591813A (zh) | 2019-04-09 |
| JP2019064336A (ja) | 2019-04-25 |
| US11897462B2 (en) | 2024-02-13 |
| US11897459B2 (en) | 2024-02-13 |
| DE102018124031A1 (de) | 2019-04-04 |
| US20190100197A1 (en) | 2019-04-04 |
| US20220048501A1 (en) | 2022-02-17 |
| DE102018124031B4 (de) | 2024-02-15 |
| CN109591813B (zh) | 2022-05-17 |
| US20210107471A1 (en) | 2021-04-15 |
| US10882518B2 (en) | 2021-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6848794B2 (ja) | 衝突回避支援装置 | |
| JP6859902B2 (ja) | 車両制御装置 | |
| US9896095B2 (en) | Collision avoidance support device | |
| KR101821506B1 (ko) | 차량의 운전 지원 장치 | |
| EP3141461A1 (en) | Driving support device | |
| US20180178802A1 (en) | Driving assistance apparatus | |
| JP7176415B2 (ja) | 衝突前制御装置 | |
| JP2003112618A (ja) | 車両用制動制御装置 | |
| JP2012071677A (ja) | 車両の運転支援装置 | |
| JP2001191815A (ja) | 追従走行制御装置 | |
| US11485356B2 (en) | Vehicle control device and control method | |
| JP7272255B2 (ja) | 運転支援装置 | |
| JP2022024323A (ja) | 衝突回避支援装置 | |
| JP3890967B2 (ja) | 車両用制動制御装置 | |
| JP2022024322A (ja) | 衝突回避支援装置 | |
| JP2020097346A (ja) | 車両の走行制御装置 | |
| JP2019002689A (ja) | 物標検出装置 | |
| JP2017117192A (ja) | 運転支援装置 | |
| JP2011195082A (ja) | 車両制御装置 | |
| JP2004237813A (ja) | 車両用制動制御装置 | |
| JP2023012711A (ja) | 車両制御装置および車両制御方法 | |
| JP2005112243A (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP2008280011A (ja) | 車両の運転支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200213 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210215 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6848794 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |