JP6744758B2 - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP6744758B2 JP6744758B2 JP2016097388A JP2016097388A JP6744758B2 JP 6744758 B2 JP6744758 B2 JP 6744758B2 JP 2016097388 A JP2016097388 A JP 2016097388A JP 2016097388 A JP2016097388 A JP 2016097388A JP 6744758 B2 JP6744758 B2 JP 6744758B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- scanning direction
- sub
- detection
- pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/50—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control
- G03G15/5054—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control by measuring the characteristics of an intermediate image carrying member or the characteristics of an image on an intermediate image carrying member, e.g. intermediate transfer belt or drum, conveyor belt
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/01—Apparatus for electrographic processes using a charge pattern for producing multicoloured copies
- G03G15/0142—Structure of complete machines
- G03G15/0178—Structure of complete machines using more than one reusable electrographic recording member, e.g. one for every monocolour image
- G03G15/0189—Structure of complete machines using more than one reusable electrographic recording member, e.g. one for every monocolour image primary transfer to an intermediate transfer belt
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/50—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control
- G03G15/5054—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control by measuring the characteristics of an intermediate image carrying member or the characteristics of an image on an intermediate image carrying member, e.g. intermediate transfer belt or drum, conveyor belt
- G03G15/5058—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control by measuring the characteristics of an intermediate image carrying member or the characteristics of an image on an intermediate image carrying member, e.g. intermediate transfer belt or drum, conveyor belt using a test patch
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/01—Apparatus for electrophotographic processes for producing multicoloured copies
- G03G2215/0151—Apparatus for electrophotographic processes for producing multicoloured copies characterised by the technical problem
- G03G2215/0158—Colour registration
- G03G2215/0161—Generation of registration marks
Description
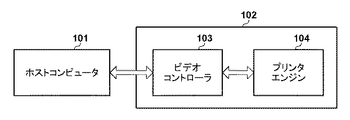
図1は、本実施形態による画像形成装置102を含むシステム構成図である。ホストコンピュータ101が画像形成装置102に画像データを送信して画像形成を指示すると、画像形成装置102は画像形成を行う。ビデオコントローラ103は、ホストコンピュータ101から画像形成が指示されると、色変換やハーフトーン処理などの各種データ処理を行い、プリンタエンジン104に処理後の画像データを送信して画像形成を指示する。プリンタエンジン104は、ビデオコントローラ103から画像形成が指示されると、受信する画像データに従い図2に示す画像形成装置の機構部を制御して記録媒体に画像形成を行う。
|(dYza+dYzb)/2−(dKza+dKzb)/2|−3×(w+s)
上記式は、第1画像群及び第2画像群のイエローの斜線の平均位置と、第1画像群及び第2画像群のブラックの斜線の平均位置との距離から、イエローとブラックの副走査方向の理想的な距離を減じたものである。なお、上記式において色ずれ量が負であることは、イエローとブラックの副走査方向の距離が理想より狭くなっていること、つまり、イエローが副走査方向の上流側にずれていることを示している。反対に、色ずれ量が正であることは、イエローとブラックとの副走査方向の距離が理想より広くなっていること、つまり、イエローが副走査方向の下流側にずれていることを示している。マゼンタ及びシアンの副走査方向の色ずれ量も同様の考え方により求めることができる。なお、マゼンタとブラックの理想的な距離は、2×(w+s)であり、シアンとブラックの理想的な距離は(w+s)である。
(|dKzb−dKza|−|dYzb−dYza|)/2
図8(A)に示す様に、上記式の|dKzb−dKza|は、第1画像群と第2画像群のブラックの斜線の副走査方向の距離802を示している。同様に、|dYzb−dYza|は、第1画像群と第2画像群のイエローの斜線の副走査方向の距離801を示している。したがって、上記式の分子は、距離802から距離801を減じた値を示している。本実施形態において斜線の副走査方向に対する角度の絶対値は45度であるため、距離802と距離801の差は主走査方向の色ずれ量の2倍となる。したがって、距離802から距離801を減じた値を2で割ることで主走査方向の色ずれ量が求められる。図8(A)から明らかな様に、イエローがブラックに対して正側にずれると、距離801は、距離802より小さくなる。なお、本実施形態では、図8(A)の矢印方向が正側のずれとしている。したがって、本実施形態では、距離802から距離801を減じることで、その符号がずれの方向を示すことになる。なお、マゼンタ、シアンについても同様である。
dRYs=|(dRY0a+dRY0b)+(dRY0b+dRY1a)+(dRY1a+dRY1b)+(dRY2a+dRY2b)+(dRY2b+dRY3a)+(dRY3a+dRY3b)−(dRK0a+dRK0b)−(dRK0b+dRK1a)−(dRK1a+dRK1b)−(dRK2a+dRK2b)−(dRK2b+dRK3a)−(dRK3a+dRK3b)|/12−3×(w+s)
マゼンタ及びシアンについても、ブラックとの理想的な距離が異なる以外は同様である。
dRYm=(|dRK0b−dRK0a|−|dRK1a−dRK0b|+|dRK1b−dRK1a|−|dRK2b−dRK2a|+|dRK3a−dRK2b|−|dRK3b−dRK3a|)/12−(|dRY0b−dRY0a|−|dRY1a−dRY0b|+|dRY1b−dRY1a|−|dRY2b−dRY2a|+|dRY3a−dRY2b|−|dRY3b−dRY3a|)/12
なお、ブラックとイエローそれぞれについて、平均値を求める際の符号が異なるのは、図7(A)と図7(B)のパターンでは、符号と色ずれの方向との関係が逆であるからである。
dYs=(dRYs+dLYs)/2
である。同様に、イエローの主走査色ずれ量dYmは、dRYmとdLYmの平均値として求める。つまり、
dYm=(dRYm+dLYm)/2
である。
dYw=dRYm−dLYm
により求めるまた、イエローの傾き量dYkは基準色であるブラックに対する走査線の傾き量であり、
dYk=dRYs−dLYs
により求める。
続いて、第二実施形態について第一実施形態との相違点を中心に説明する。図12(A)及び(B)は、図7(A)及び(B)の第1画像群の各画像の副走査方向に対する角度を90度としたものである。図12から明らかな様に、第1画像群の角度を変更したことにより、副走査方向の長さLbaseを、第一実施形態より短くすることができる。なお、副走査方向の色ずれ量の計算方法は第一実施形態と同様である。一方、主走査方向の色ずれ量は、例えば、イエローに関しては以下の式となる。
(|dKzb−dKza|−|dYzb−dYza|)
第一実施形態では、第1画像群の各画像が副走査方向に対して45度であるが、本実施形態では90度となるため、第一実施形態における2で除する部分が無くなる。その他は、第一実施形態と同様である。
続いて、第三実施形態について第一実施形態及び第二実施形態との相違点を中心に説明する。図13は、本実施形態による検出パターンを示す図である。本実施形態では、4つの基本パターン1501R、1502R、1503R及び1504Rを形成する。基本パターン1501Rと1503Rとしては、先の第一実施形態の図9における基本パターン901Rと同様のパターンを形成する。また、基本パターン1502Rと1504Rとしては、図9における基本パターン902Rと同様のパターンを形成する。なお、4つの基本パターン1501R、1502R、1503R及び1504Rの第1画像群は第二実施形態のものであっても良い。本実施形態では、基本パターン間の間隔Laを第一実施形態の半分、つまり、2Ldとする。しがって、4つの基本パターンそれぞれに含まれる3組のパターンの位相は同位相となり、12個のパターンの検出結果を平均化することで、ドラム周期及びドラム半周期のAC色ずれを低減することができる。さらに、本実施形態では、基本パターン間の間隔Laを第一実施形態の半分としたため、間隔Laは、ベルト周期の1/4の間隔に近い値となる。したがって、ベルト周期によるAC色ずれを4位相で平均化でき、ベルト周期のAC色ずれを効果的に低減できることになる。さらに、本実施形態では、合計12個のパターンの平均を使用するため、AC色ずれが正弦波ではない波形になった場合においても、より効果的に色ずれを低減することができる。
以上、画像形成装置は、複数の基本パターンを、副走査方向に沿って所定間隔(第1間隔)で配置した検出パターンを形成する。複数の基本パターンのそれぞれは、副走査方向に沿って所定間隔(第2間隔)で配置されたN個の画像群(Nは3以上の整数)を含んでいる。ここで、N個の画像群は、副走査方向に対して第1角度の線状の画像を含む第1画像群と、第1角度とは異なる第2角度の線状の画像を含む第2画像群と、を副走査方向に沿って交互に配置したものである。一例として、第1角度は45度であり、第2角度は−45度である。また、一例として、第1角度は90度であり、第2角度は−45度である。しかしながら、その他の角度を使用することもできる。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
Claims (14)
- 感光体にトナー像を形成し、前記感光体のトナー像を、回転駆動される像担持体に転写することで、前記像担持体に検出パターンを形成する形成手段と、
前記検出パターンを検出する検出手段と、
前記検出手段による前記検出パターンの検出結果に基づき色ずれ補正制御を行う制御手段と、
を備えており、
前記検出パターンは、前記像担持体の回転方向である副走査方向に沿って第1間隔で配置された複数の基本パターンを含み、
前記複数の基本パターンのそれぞれは、前記副走査方向に沿って第2間隔で配置されたN個の画像群(Nは3以上の整数)を含み、
前記N個の画像群は、前記副走査方向に対して第1角度の画像を含む第1画像群と、前記副走査方向に対して前記第1角度とは異なる第2角度の画像を含む第2画像群と、を前記副走査方向に沿って交互に配置したものであり、
前記第1間隔は、前記感光体又は前記感光体を駆動するモータの回転周期に対応する第1周期のM(Mは2以上の整数)倍の期間に前記像担持体の表面が移動する距離に対応し、
前記第2間隔は、前記第1周期の(N−1)分の1の期間に前記像担持体の表面が移動する距離に対応することを特徴とする画像形成装置。 - 前記Mの値は、前記像担持体の周長を正の整数で除した値と、前記第1周期の期間に前記像担持体の表面が移動する距離との比較により決定されることを特徴とする請求項1に記載の画像形成装置。
- 前記複数の基本パターンの数は、前記Mの値を求めた際の前記像担持体の周長の除数に基づき決定されることを特徴とする請求項1又は2に記載の画像形成装置。
- 前記制御手段は、前記複数の基本パターンの各基本パターンの隣接する前記第1画像群と前記第2画像群の(N−1)個の組それぞれについて、前記検出手段による前記第1画像群と前記第2画像群の検出結果に基づく色ずれ量を求め、前記複数の基本パターンそれぞれの(N−1)個の組の色ずれ量を平均化した値に基づき前記色ずれ補正制御を行うことを特徴とする請求項1から3のいずれか1項に記載の画像形成装置。
- 前記第1画像群は、複数の色それぞれについて、前記第1角度の線状のトナー像を含み、
前記第2画像群は、前記複数の色それぞれについて、前記第2角度の線状のトナー像を含むことを特徴とする請求項1から4のいずれか1項に記載の画像形成装置。 - 前記第1画像群と前記第2画像群は、前記副走査方向に対して線対称であることを特徴とする請求項1から5のいずれか1項に記載の画像形成装置。
- 前記第1角度は90度であることを特徴とする請求項1から5のいずれか1項に記載の画像形成装置。
- 前記複数の基本パターンのうちの前記副走査方向において隣接する2つの基本パターンの前側の基本パターンの最初の画像群が前記第1画像群であると、後側の基本パターンの最初の画像群は前記第2画像群であり、
前記複数の基本パターンのうちの前記副走査方向において隣接する2つの基本パターンの前側の基本パターンの最初の画像群が前記第2画像群であると、後側の基本パターンの最初の画像群は前記第1画像群であることを特徴とする請求項1から7のいずれか1項に記載の画像形成装置。 - 前記第2間隔は、前記副走査方向と直交する主走査方向の所定位置における隣接する画像群間の距離であることを特徴とする請求項1から8のいずれか1項に記載の画像形成装置。
- 前記形成手段は、前記複数の基本パターンの隣接する2つの基本パターンの間に濃度検出パターンを形成し、
前記制御手段は、前記濃度検出パターンの検出結果に基づき濃度補正制御を行うことを特徴とする請求項1から9のいずれか1項に記載の画像形成装置。 - 感光体にトナー像を形成し、前記感光体のトナー像を、回転駆動される像担持体に転写することで、前記像担持体に検出パターンを形成する形成手段と、
前記検出パターンを検出する検出手段と、
前記検出手段による前記検出パターンの検出結果に基づき色ずれ補正制御を行う制御手段と、
を備えており、
前記検出パターンは1つ以上の基本パターンを含み、
前記基本パターンは、前記像担持体の回転方向である副走査方向に沿って所定間隔で配置されたN個の画像群(Nは3以上の整数)を含み、
前記N個の画像群は、前記副走査方向に対して第1角度の画像を含む第1画像群と、前記副走査方向に対して前記第1角度とは異なる第2角度の画像を含む第2画像群と、を前記副走査方向に沿って交互に配置したものであり、
前記所定間隔は、前記感光体又は前記感光体を駆動するモータの回転周期に対応する第1周期の(N−1)分の1の期間に前記像担持体の表面が移動する距離に対応し、
前記制御手段は、前記基本パターンの隣接する前記第1画像群と前記第2画像群の(N−1)個の組それぞれについて、前記検出手段による第1画像群と第2画像群の検出結果に基づく色ずれ量を求め、前記1つ以上の基本パターンの(N−1)個の組の色ずれ量を平均化した値に基づき前記色ずれ補正制御を行うことを特徴とする画像形成装置。 - 感光体にトナー像を形成し、前記感光体のトナー像を、回転駆動される像担持体に転写することで、前記像担持体に検出パターンを形成する形成手段と、
前記検出パターンを検出する検出手段と、
前記検出手段による前記検出パターンの検出結果に基づき色ずれ補正制御を行う制御手段と、
を備えており、
前記検出パターンは、前記像担持体の回転方向である副走査方向に沿って第1間隔で配置された複数の基本パターンを含み、
前記複数の基本パターンのそれぞれは、前記副走査方向に沿って第2間隔で配置されたN個の画像群(Nは3以上の整数)を含み、
第k画像群(kは1からNの整数)は、前記副走査方向に対して第k角度の画像を含み、
第i角度(iは2からN−1の整数)は、第(i−1)角度と第(i+1)角度とは異なる角度であり、
前記第1間隔は、前記感光体又は前記感光体を駆動するモータの回転周期に対応する第1周期のM(Mは2以上の整数)倍の期間に前記像担持体の表面が移動する距離に対応し、
前記第2間隔は、前記第1周期の(N−1)分の1の期間に前記像担持体の表面が移動する距離に対応することを特徴とする画像形成装置。 - 前記複数の基本パターンのうちの前記副走査方向において隣接する2つの基本パターンの前側の基本パターンの最初の画像群の角度と、後側の基本パターンの最初の画像群の角度は異なることを特徴とする請求項12に記載の画像形成装置。
- 感光体にトナー像を形成し、前記感光体のトナー像を、回転駆動される像担持体に転写することで、前記像担持体に検出パターンを形成する形成手段と、
前記検出パターンを検出する検出手段と、
前記検出手段による前記検出パターンの検出結果に基づき色ずれ補正制御を行う制御手段と、
を備えており、
前記検出パターンは1つ以上の基本パターンを含み、
前記1つ以上の基本パターンのそれぞれは、副走査方向に沿って所定間隔で配置されたN個の画像群(Nは3以上の整数)を含み、
第k画像群(kは1からNの整数)は、前記副走査方向に対して第k角度の画像を含み、
第i角度(iは2からN−1の整数)は、第(i−1)角度と第(i+1)角度とは異なる角度であり、
前記所定間隔は、前記感光体又は前記感光体を駆動するモータの回転周期に対応する第1周期の(N−1)分の1の期間に前記像担持体の表面が移動する距離に対応し、
前記制御手段は、前記基本パターンの隣接する2つの画像群の(N−1)個の組それぞれについて、前記検出手段による画像群の検出結果に基づく色ずれ量を求め、前記1つ以上の基本パターンの(N−1)個の組の色ずれ量を平均化した値に基づき前記色ずれ補正制御を行うことを特徴とする画像形成装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016097388A JP6744758B2 (ja) | 2016-05-13 | 2016-05-13 | 画像形成装置 |
| US15/496,412 US10191428B2 (en) | 2016-05-13 | 2017-04-25 | Image forming apparatus performing misregistration correction control based on detection results of detection pattern |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016097388A JP6744758B2 (ja) | 2016-05-13 | 2016-05-13 | 画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017203964A JP2017203964A (ja) | 2017-11-16 |
| JP2017203964A5 JP2017203964A5 (ja) | 2019-06-13 |
| JP6744758B2 true JP6744758B2 (ja) | 2020-08-19 |
Family
ID=60297463
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016097388A Active JP6744758B2 (ja) | 2016-05-13 | 2016-05-13 | 画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10191428B2 (ja) |
| JP (1) | JP6744758B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019015786A (ja) * | 2017-07-04 | 2019-01-31 | キヤノン株式会社 | 画像形成装置 |
| JP2022157437A (ja) | 2021-03-31 | 2022-10-14 | キヤノン株式会社 | 画像形成装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001356542A (ja) | 2000-06-16 | 2001-12-26 | Canon Inc | カラー画像形成装置並びにカラー画像形成装置の制御方法および記憶媒体 |
| KR20060057119A (ko) * | 2004-11-23 | 2006-05-26 | 삼성전자주식회사 | 칼라화상형성장치 |
| JP2007232763A (ja) * | 2006-02-27 | 2007-09-13 | Canon Inc | カラー画像形成装置 |
| JP5101921B2 (ja) | 2006-10-04 | 2012-12-19 | 株式会社リコー | 画像形成装置および色ずれ検出方法 |
| JP5251072B2 (ja) * | 2007-10-23 | 2013-07-31 | 富士ゼロックス株式会社 | 検出装置、画像処理装置および画像形成装置 |
| KR101636266B1 (ko) * | 2009-01-12 | 2016-07-20 | 삼성전자주식회사 | 화상형성장치 및 그 칼라 레지스트레이션 방법 |
| JP5852365B2 (ja) | 2011-06-30 | 2016-02-03 | キヤノン株式会社 | 画像形成装置 |
| JP6122264B2 (ja) | 2011-10-24 | 2017-04-26 | キヤノン株式会社 | 画像形成装置 |
| JP6064560B2 (ja) * | 2012-12-04 | 2017-01-25 | 株式会社リコー | 画像形成装置 |
| WO2014097810A1 (en) | 2012-12-19 | 2014-06-26 | Canon Kabushiki Kaisha | Image forming apparatus and detection apparatus |
| US9885990B2 (en) | 2012-12-19 | 2018-02-06 | Canon Kabushiki Kaisha | Image forming apparatus and detection apparatus for detecting position or density information of detection image |
| JP6335435B2 (ja) * | 2013-04-24 | 2018-05-30 | キヤノン株式会社 | 画像形成装置 |
| JP6326751B2 (ja) | 2013-09-12 | 2018-05-23 | 株式会社リコー | 光書き込み制御装置、画像形成装置及び光書き込み装置の制御方法 |
| JP2015197469A (ja) | 2014-03-31 | 2015-11-09 | キヤノン株式会社 | 画像形成装置およびその制御方法、並びにプログラム |
| JP6302329B2 (ja) * | 2014-04-02 | 2018-03-28 | キヤノン株式会社 | 画像形成装置 |
-
2016
- 2016-05-13 JP JP2016097388A patent/JP6744758B2/ja active Active
-
2017
- 2017-04-25 US US15/496,412 patent/US10191428B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017203964A (ja) | 2017-11-16 |
| US20170329267A1 (en) | 2017-11-16 |
| US10191428B2 (en) | 2019-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5400920B2 (ja) | 画像形成装置 | |
| KR20110045896A (ko) | 화상형성장치 및 그 제어방법 | |
| JP5181753B2 (ja) | カラー画像形成装置、位置ずれ補正方法、位置ずれ補正プログラム、及び記録媒体 | |
| JP5055807B2 (ja) | 画像形成装置 | |
| JP4654708B2 (ja) | 画像形成装置 | |
| JP6326751B2 (ja) | 光書き込み制御装置、画像形成装置及び光書き込み装置の制御方法 | |
| JP6744758B2 (ja) | 画像形成装置 | |
| JP3698509B2 (ja) | カラー画像形成装置 | |
| JP2009251109A (ja) | 画像形成装置 | |
| JP3558620B2 (ja) | 位置ずれ補正方法及びカラー画像形成装置 | |
| JP4345837B2 (ja) | 画像形成装置 | |
| JP4246811B2 (ja) | 画像形成装置 | |
| JP5364985B2 (ja) | 画像形成装置 | |
| JP6164139B2 (ja) | 画像形成装置、形成条件の調整方法、および、形成条件の調整プログラムを記憶した記憶媒体 | |
| JP2010204445A (ja) | 画像形成装置 | |
| JP2008209659A (ja) | 画像形成装置及び制御方法 | |
| JP6614850B2 (ja) | 画像形成装置 | |
| JP2009169397A (ja) | 位置ずれ量検出装置、位置ずれ量検出方法、位置ずれ量検出プログラム | |
| JP2016157001A (ja) | 画像形成装置 | |
| US9008557B2 (en) | Image forming apparatus to form an auto color registration pattern and control method thereof | |
| JP2014215411A (ja) | 画像形成装置 | |
| JP7370774B2 (ja) | 画像形成装置 | |
| JP5375104B2 (ja) | 位置ずれ量算出装置、位置ずれ量算出方法、位置ずれ量算出プログラム | |
| JP2011085789A (ja) | 画像形成装置 | |
| JP7005210B2 (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190426 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190426 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200402 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200703 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200731 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6744758 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |