(第1実施形態)
以下、本発明の第1実施形態に係る駆動装置を、図1〜図5を参照して説明する。図1は、第1実施形態に係る駆動装置の概略を示す説明図である。図1に示す駆動装置10は、駆動部20と、被駆動部30と、受信部としての超音波受信部40と、制御部50と、を備えている。なお、図1において、駆動部20と被駆動部30との配置関係を示すため、図1紙面の左右方向をX方向、紙面の上下方向をY方向、紙面に垂直方向をZ方向とする。これらの方向は、図2A、図2B、図3A、および図3Bも同様である。
駆動部20は、被駆動部30を移動させる駆動力を発生する圧電アクチュエーター22を有している。被駆動部30は、X方向に沿って延びるリニアガイド32に取り付けられて直線状の移動方向Dm(X方向)に沿って移動可能に設けられている。受信部としての超音波受信部40は、被駆動部30の基準位置、本例では、移動方向Dmの左側の端部に、駆動部20と反対側を向くように取り付けられている。制御部50は、駆動部20や超音波受信部40と接続され、駆動部20の有している圧電アクチュエーター22の動作を制御する。
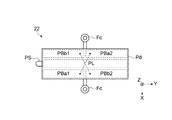
図2Aおよび図2Bを参照して、駆動部20の有する圧電アクチュエーター22について説明する。図2Aおよび図2Bは、圧電アクチュエーター22の一例を示す概略平面図である。図2Aは、圧電アクチュエーター22の一方の平面(図1の紙面手前側の平面)を示しており、図2Bは、図2Aの一方の平面側から透視した状態で他方の平面を示している。
圧電アクチュエーター22は、図2Aおよび図2Bに示すように、矩形状の振動板(振動部)Pdの両面にそれぞれ面対称に設けられた5つの圧電素子(圧電素子PBa1,PBa2,PBb1,PBb2,PL)を備えている。5つの圧電素子PBa1,PBa2,PBb1,PBb2,PLは、それぞれ、圧電体と、圧電体を挟持する2つの電極と、で構成されている。5つの圧電素子PBa1,PBa2,PBb1,PBb2,PLのうち、振動板Pdの短手(幅)方向(X方向)の中央にある第1の圧電素子PLは、振動板Pdの長手方向(Y方向)のほぼ全体に亘る長方形の平面形状を有している。他の4つの圧電素子PBa1,PBa2,PBb1,PBb2は、第1の圧電素子PLを挟んで振動板Pdの四隅方向の位置に配置され、同一の長方形の平面形状を有している。4つの圧電素子PBa1,PBa2,PBb1,PBb2のうち、第1の対角にある一対の第2の圧電素子PBa1,PBa2は圧電体を挟む電極同士が電気的に接続されて一体の圧電素子として機能する。第2の対角にある一対の第3の圧電素子PBb1,PBb2も同様である。
図3Aおよび図3Bを参照して、圧電アクチュエーター22の動作について説明する。図3Aおよび図3Bは、圧電アクチュエーター22の動作を示す説明図である。図3Aに示すように、第1の圧電素子PLは、駆動回路54から供給される高周波(超音波)の駆動信号に従って振動板Pdの長手方向(Y方向)に沿った縦振動を発生する。図3Bに示すように、第2の圧電素子PBa1,PBa2は、駆動回路54から供給される高周波(超音波)の駆動信号に従って振動板Pdの短手方向(X方向)に屈曲する屈曲振動を発生する。第3の圧電素子PBb1,PBb2も同様である。したがって、圧電アクチュエーター22は、第1の圧電素子PL、第2の圧電素子PBa1,PBa2、第3の圧電素子PBb1,PBb2によって、XY平面に沿った面内方向での超音波振動(超音波信号Su:図1参照)を発生させる。なお、以下の説明において、第1の圧電素子PL、第2の圧電素子PBa1,PBa2、第3の圧電素子PBb1,PBb2、および、振動板Pdを、「振動体」とも呼ぶ。
圧電アクチュエーター22には、図2Aおよび図2Bに示すように、振動板Pdの両側の長辺の中央部に、それぞれ固定部Fcが設けられている。圧電アクチュエーター22は、固定部Fcをネジ等によって不図示の固定枠に固定することによって駆動部20内に固定される。
また、圧電アクチュエーター22には、振動板Pdの一方の短辺の中央部に突起部PSが設けられている。圧電アクチュエーター22は、図1に示すように、突起部PSを被駆動部30に接触させることが可能なように、突起部PSを被駆動部30に向けて配置されている。
圧電アクチュエーター22は、上記した縦振動と屈曲振動との組み合わせにより、突起部PSを圧電アクチュエーター22のXY平面に沿った面内方向において楕円の軌道で運動させて被駆動部30を摺動する。この摺動により発生する駆動力によって、圧電アクチュエーター22は、被駆動部30を直線状の移動方向Dm(X方向)に、駆動部20に対して相対的に移動させる。なお、被駆動部30を駆動する際に圧電素子PBa1,PBa2,PBb1,PBb2,PLに供給される駆動信号の周波数は、振動体の共振周波数あるいはその近傍周波数(以下、単に「共振周波数」と呼ぶ)に設定される。本形態では、振動体の共振周波数は、1MHz(メガヘルツ)程度に設定されている。
受信部としての超音波受信部40は、圧電アクチュエーター22の振動によって圧電アクチュエーター22から発信されて空中を伝播する超音波信号Suを受信する。超音波受信部40には、圧電アクチュエーター22から発信される共振周波数の超音波信号Suを受信可能な受波器が用いられる。超音波受信部40は、被駆動部30の基準位置、本例では、移動方向Dmの左側の端部、即ち被駆動部30の駆動部20と反対側の端部に位置し、駆動部20と反対側を向くように取り付けられている。障害物Hが存在する場合の超音波信号Suは、障害物Hから反射される反射波Rsuを受信することにより、障害物Hの無い場合の超音波信号Suと異なる状態となる。したがって、障害物Hが存在する場合、超音波受信部40は、障害物Hの無い場合と異なる状態の超音波信号Suを受信することになる。超音波受信部40は、受信した音波信号Suの状態に基づいた出力信号を、後述する超音波検出回路56に出力する。
制御部50は、駆動部20や超音波受信部40と接続されている。制御部50は、判断部51および電力制御部55を含む制御回路52と、記憶部53と、駆動回路54と、超音波検出回路56と、を備え、駆動部20の有する圧電アクチュエーター22の動作を制御する。
駆動回路54は、制御回路52の制御に従って通常の駆動動作のための駆動信号と、障害物Hの有無を検知するための超音波信号Suとを出力可能に構成されている。ここで、図4を参照して、駆動回路54の出力する圧電アクチュエーター22の駆動波形および超音波信号波形の一例について説明する。図4は、圧電アクチュエーター22の駆動波形および超音波信号波形の一例を示す説明図である。図4に示すように、通常の駆動動作において、駆動回路54は、圧電アクチュエーター22が上記した駆動動作によって被駆動部30を移動させる駆動信号Seを出力する。障害物Hの有無を検知するための超音波信号Suは、この駆動信号Seによって、空中を伝播する信号として圧電アクチュエーター22から発信される。
なお、超音波信号Suは、駆動信号Seの周期と異なる周期で発信することができる。例えば、超音波信号Suは、図4に示すように、駆動信号Seにピーク波Spを重畳させ、このピーク波Spに基づいて発生した超音波振動によって発信される信号とすることができる。このようなピーク波Spによって超音波信号Suを出力することにより、圧電アクチュエーター22が複数設けられている構成においても、複数の圧電アクチュエーター22の超音波信号Suの出力タイミングを、それぞれ異ならせることが可能となり、圧電アクチュエーター22ごとの超音波信号Suを区別・判別することが可能となる。これにより、障害物Hの有無の検知とともに、被駆動部30に対する障害物の存在方向などを検知することが可能となる。
超音波検出回路56は、超音波受信部40で受信した超音波信号Suによって得られた出力信号に基づいて超音波検出信号を生成し、生成した超音波検出信号を記憶部53および制御回路52に出力する。
記憶部53は、超音波検出回路56から出力された超音波検出信号を受信し、超音波信号Suの状態として記憶する。記憶部53は、例えば、試行などによって得られた障害物Hの無い場合の超音波信号Suを、基準超音波信号として記憶することができる。また、記憶部53は、駆動装置10において、繰り返し行われる通常の駆動動作状態における超音波信号Suを連続して記憶し、平均値化などの処理を行うことにより基準超音波信号を求めて記憶することができる。
制御回路52は、超音波検出回路56から出力された超音波検出信号を受信し、障害物Hの有無を判断して圧電アクチュエーター22の駆動を制御する。制御回路52は、障害物Hの有無を判断する判断部51と、圧電アクチュエーター22へ供給する電力を制御する電力制御部55とを備えている。
判断部51は、超音波検出回路56から出力された超音波検出信号、および記憶部53に記憶されている超音波信号Suの状態や基準超音波信号によって、被駆動部30の可動領域内に障害物Hが有るか否か(有無)を判断し、電力制御部55に判断信号を出力する。判断部51は、例えば繰り返し行われる通常の駆動動作状態における超音波信号Suの状態を時系列的に読み取り、予め設定された閾値を超える変化を生じた場合に、障害物Hが存在すると判断し、判断信号を出力することができる。
また、判断部51は、例えば記憶部53に記憶されている基準超音波信号の状態と、被駆動部30の移動中(可動中)に超音波受信部40から出力される超音波信号Suの状態によって超音波検出回路56から出力された超音波検出信号とを比較する。そして、判断部51は、基準超音波信号の状態と超音波信号Suの状態とに変化を生じた場合に、障害物Hが存在すると判断し、判断信号を出力することができる。なお、基準超音波信号の状態と超音波信号Suの状態との変化は、例えば、その差が予め設定された閾値を超えた場合に変化を生じたと判断することができる。
判断部51が、このような比較を行うことによって障害物Hの有無を判断することにより、簡便な方法で、容易に外乱などによる超音波信号Suのばらつきを排除することができ、障害物Hの有無の判断を高精度で行うことができる。
電力制御部55は、圧電アクチュエーター22へ供給する電力を制御する。電力制御部55は、圧電アクチュエーター22へ所定の電力を供給し、供給された電力によって圧電アクチュエーター22が振動することによって、駆動部20と被駆動部30とが相対的に移動し、被駆動部30を移動方向Dmに移動させることができる。このように、電力制御部55は、駆動部20と被駆動部30との相対位置や例えば移動スピードなどの移動状態を制御することができる。電力制御部55は、判断部51から出力された判断信号により、圧電アクチュエーター22へ供給する電力を制御し、圧電アクチュエーター22の移動状態を制御する。ここで、圧電アクチュエーター22の移動状態とは、移動スピードを速めたり遅くしたりする、もしくは、移動を停止したり開始したりすることなどを含んでいる。
例えば、電力制御部55は、判断部51から出力された判断信号により、障害物Hが有りそうだと判断した場合には、圧電アクチュエーター22へ供給する電力を小さくし、圧電アクチュエーター22によって駆動される被駆動部30の移動スピードを遅くする。そして、さらに継続して判断部51が障害物Hの存在を判断している場合は、圧電アクチュエーター22への電力の供給を停止し、圧電アクチュエーター22を停止する。これにより、被駆動部30の移動を停止することができる。このように、障害物Hの存在を覚知した場合に、先ず被駆動部30の移動スピードを減速し、その後停止させることによって、被駆動部30を停止させる際の慣性衝撃を減少させることができ、急停止などによって駆動装置10の受けるダメージを少なくすることができる。
このように、判断部51から出力された判断信号によって電力制御部55が圧電アクチュエーター22へ供給する電力を制御することにより、駆動部20の駆動状態、即ち被駆動部30の移動スピード、移動停止など、被駆動部30の移動状態を容易に制御することができる。
次に、図5を参照して、駆動装置10における障害物Hの検出手順について説明する。図5は、第1実施形態に係る駆動装置10の障害物Hを検出する手順の概要を示すフローチャートである。なお、以下では、上述にて図1〜図4を参照して説明した駆動装置10の構成と同符号を用いて説明する。また、以下では、基準超音波信号の求め方の一例として、試行を行った場合の手順を示して説明する。
先ず、制御回路52(電力制御部55)によって制御され、供給される電力によって駆動された圧電アクチュエーター22によって駆動部20を駆動し、被駆動部30の移動を行う(ステップS101)。このとき、圧電アクチュエーター22から発信された超音波信号Suは、超音波受信部40によって受信されている。
次に、制御回路52は、駆動部20の駆動による被駆動部30の移動が、基準超音波信号を求めるための試行であるか否かを判定する(ステップS103)。ここで制御回路52が「試行である」と判定した場合(ステップS103:Yes)に、記憶部53は、試行によって得られた障害物Hの無い場合の超音波信号Suを、基準超音波信号として記憶する(ステップS105)。なお、制御回路52が「試行でない」と判定した場合(ステップS103:No)は、基準超音波信号の状態と、現在受信している超音波信号Suに基づき超音波検出回路56から出力された超音波検出信号の状態とを比較する工程(ステップS107)に移行する。
次に、制御回路52は、記憶部53に記憶された基準超音波信号を読み出し、その基準超音波信号の状態と、現在受信している超音波信号Suに基づき超音波検出回路56から出力された超音波検出信号の状態とを比較する(ステップS107)。
次に、制御回路52は、前述の比較によって、基準超音波信号の状態と、現在受信している超音波信号Suに基づき超音波検出回路56から出力された超音波検出信号の状態とに差が有るか否かを判定する(ステップS109)。なお、基準超音波信号の状態と、現在受信している超音波信号Suの状態との差の有無については、例えば、予め設定された閾値を超える変化を生じたか否かによって判定することができる。ここで、基準超音波信号の状態と、現在受信している超音波信号Suに基づき超音波検出回路56から出力された超音波検出信号とに差がある、即ち被駆動部30の可動領域内に「障害物Hが有る」と判断部51が判断した場合(ステップS109:Yes)は、障害物対処処理工程(ステップS111)に移行する。
なお、基準超音波信号の状態と、現在受信している超音波信号Suに基づき超音波検出回路56から出力された超音波検出信号とに差が無い、即ち被駆動部30の可動領域内には「障害物Hが無い」と判断部51が判断した場合(ステップS109:No)は、被駆動部30の移動を行う工程(ステップS101)に戻り、一連の手順を繰り返す。この場合、被駆動部30は、制御回路52(電力制御部55)によって制御、供給される電力によって駆動された圧電アクチュエーター22によって駆動部20が駆動されることによって駆動される。
障害物対処処理工程(ステップS111)では、判断部51から出力された判断信号により、電力制御部55の圧電アクチュエーター22へ供給する電力を制御し、圧電アクチュエーター22の移動状態を制御する。具体的な障害物対処処理の一例について、以下に説明する。電力制御部55は、判断部51から出力された判断信号により、「障害物Hが有りそうだ」と判断した場合には、先ず圧電アクチュエーター22へ供給する電力を低減させ、圧電アクチュエーター22によって駆動される被駆動部30の移動スピードを遅くする。そして、さらに継続して判断部51が、「障害物Hが有る」と判断している場合は、圧電アクチュエーター22への電力の供給を停止し、圧電アクチュエーター22の動作を停止させることにより、被駆動部30の移動を停止する。このように、障害物対処処理工程(ステップS111)では、障害物Hの存在を覚知した場合に、先ず被駆動部30の移動スピードを減速し、その後停止させることによって、被駆動部30を停止させる際の慣性衝撃を減少させるなどの障害物対処処理を行う。
なお、上述では、基準超音波信号の求め方の一例として、試行の工程が設けられ、試行であるか否かを判定する工程(ステップS103)を有する場合の手順を示して説明したがこれに限らない。基準超音波信号は、駆動装置10において、繰り返し行われる通常の駆動動作状態における超音波信号Suを連続して記憶し、平均値化などの処理を行うことにより基準超音波信号を求めてもよい。この場合、試行であるか否かを判定する工程(ステップS103)では、判定がNoとなる。
また、上述では、被駆動部30を移動させる駆動部20を単数設ける構成を例示して説明したが、駆動部20の配置個数は、複数であってもよい。駆動部20の配置個数を複数とすることにより、駆動力を大きくすることができ、より大きな被駆動部30を駆動することが可能となる。
以上説明したように、第1実施形態の駆動装置10では、被駆動部30を駆動する駆動力を出力する駆動源としての圧電アクチュエーター22を超音波信号Suの送波器として利用することにより、以下のような効果を奏することができる。
(1)駆動装置10では、駆動部20に備えられた圧電アクチュエーター22の振動部から超音波信号Suが発信され、受信部としての超音波受信部40で受信された超音波信号Suに基づいて超音波受信部40から出力された出力信号により超音波検出回路56から出力された超音波検出信号により判断部51が障害物Hの有無を判断する。このように、被駆動部30を移動させる駆動部20のうちに超音波信号Suを発信する振動部としての振動板Pd(圧電アクチュエーター22)が備えられている。換言すれば、駆動部20と超音波信号Suを発信する振動板Pdとが一体的に構成されているため、駆動装置10の小型化・軽量化を実現することができる。
(2)また、駆動装置10では、判断部51が、記憶部53に記憶されている障害物Hの無い場合の超音波信号Suである基準超音波信号の状態と、被駆動部30の移動中の超音波信号の状態とを比較し、その変化によって障害物Hが存在すると判断し、判断信号を出力する。このように、簡便な方法によって、容易に障害物Hの有無を判断することができる。
(3)また、駆動装置10では、判断部51から出力された判断信号によって電力制御部55が圧電アクチュエーター22へ供給する電力を制御することにより、駆動部20(被駆動部30)の駆動状態、換言すれば移動スピードの加減などを容易に制御することができる。
(第2実施形態)
以下、本発明の第2実施形態に係る駆動装置を、図6Aおよび図6Bを参照して説明する。図6Aおよび図6Bは、第2実施形態に係る駆動装置の概略を示す説明図であり、図6Aは駆動装置の概略を示す平面図、図6Bは図6Aに示すP視からの側面図である。なお、図6Aおよび図6Bに示す第2実施形態に係る駆動装置100は、第1実施形態に係る駆動装置10と同じく、駆動部20と、被駆動部130と、受信部としての超音波受信部140,140aと、図1に示す制御部50(不図示)と、を備えている。なお、制御部50の構成・動作・障害物Hの検出手順は同様であるため、ここでの図示および説明を省略する。
第2実施形態に係る駆動装置100は、第1実施形態の駆動装置10(図1参照)と比し、図6Aおよび図6Bに示すように、圧電アクチュエーター22を含む駆動部20によって駆動される被駆動部130が、回転軸134を中心軸として回転移動する点が異なっている。第2実施形態に係る駆動装置100は、ベース部133に固定された円筒状の本体部132と、本体部132と相対的に回転移動する被駆動部130とを備えている。そして、本体部132には、駆動部20および超音波受信部140aが備えられている。
駆動部20は、駆動力を発生する複数の圧電アクチュエーター22を有している。駆動部20は、複数の圧電アクチュエーター22の駆動力によって、被駆動部130を回転移動させる。このように、本実施形態の駆動部20は、圧電アクチュエーター22を用いた回転駆動装置としての機能を有している。
本実施形態での圧電アクチュエーター22は、複数配置されている。複数の圧電アクチュエーター22は、円筒状の本体部132の外周に沿って配置され、突起部Psが被駆動部130に向くように、本体部132の外周に複数(本形態では、八つ(8個))が、ほぼ等間隔で取り付けられている。そして複数の圧電アクチュエーター22の駆動力により、被駆動部130を回転移動させる。このように、複数の圧電アクチュエーター22が、円周状に配置され、それぞれの圧電アクチュエーター22から超音波信号Suが発信される。これにより、障害物Hの存在する位置(方向)を精度よく検知することができる。また、複数の圧電アクチュエーター22を用いているため、より大きな駆動力(本形態では回転力)を得ることができる。なお、圧電アクチュエーター22の配置は、必ずしも等間隔である必要はなく、任意の位置に配置することができる。
第2実施形態の圧電アクチュエーター22について説明する。第2実施形態の圧電アクチュエーター22は、図2Aおよび図2Bを参照して説明した第1実施形態と同様であり、矩形状の振動板(振動部)Pdの両面にそれぞれ面対称に設けられた5つの圧電素子(圧電素子PBa1,PBa2,PBb1,PBb2,PL)を備えている。なお、第2実施形態の圧電アクチュエーター22の構成は、第1実施形態と同様であるため、ここでの説明は省略する。
図3Aおよび図3Bを参照して第1実施形態で説明したように、第1の圧電素子PLは、駆動回路54(図1参照)から供給される高周波(超音波)の駆動信号に従って振動板Pdの長手方向(Y方向)に沿った縦振動を発生する。第2の圧電素子PBa1,PBa2は、駆動回路54(図1参照)から供給される高周波(超音波)の駆動信号に従って振動板Pdの短手方向(X方向)に屈曲する屈曲振動を発生する。第3の圧電素子PBb1,PBb2も同様である。したがって、圧電アクチュエーター22は、第1の圧電素子PL、第2の圧電素子PBa1,PBa2、第3の圧電素子PBb1,PBb2によって、XY平面に沿った面内方向での超音波振動(超音波信号Su:図6A参照)を発生させることができる。
第2実施形態の圧電アクチュエーター22は、被駆動部130を回転移動させることができる。図6Aおよび図6Bに示すように、圧電アクチュエーター22の突起部PSは、被駆動部130の一方板面の外周部に接触している。そして、圧電アクチュエーター22は、図3Aおよび図3Bを参照して第1実施形態で説明したように、第1の圧電素子PLにおける縦振動と、第2の圧電素子PBa1,PBa2、および第3の圧電素子PBb1,PBb2における屈曲振動との組み合わせにより、突起部PSを圧電アクチュエーター22のXY平面に沿った面内方向において楕円の軌道で運動させて被駆動部130を摺動する。この摺動により発生する駆動力によって、圧電アクチュエーター22は、被駆動部130を、被駆動部130の中心部に位置する回転軸134回りに所定の方向に回転移動させることができる。以上のように、圧電アクチュエーター22を、回転駆動源として用いることが可能である。
被駆動部130は、被駆動部130に固定された回転アーム131を含み、円筒状の本体部132の中心部に設けられた回転軸134に取り付けられて、円周状に回転移動する移動方向Rmに沿って移動可能に設けられている。被駆動部130に固定された回転アーム131は、駆動部20の回転移動に連れて移動し、移動方向Rmに沿った円周状の回転移動を行うことができる。
受信部としての超音波受信部140は、被駆動部130の基準位置、本例では、回転移動の先端に近似する回転アーム131の先端部に、回転方向の両側に一つずつ取り付けられている。二つの超音波受信部140は、回転移動する移動方向Rmの両方向に一つずつ向くように配置されている。このように超音波受信部140を配置することにより、両側の移動方向の障害物Hを捕捉することが可能となる。さらに、受信部としての超音波受信部140aは、円筒状の本体部132の外周に沿って配置され、外側を向くように本体部132の外周に複数(本形態では、四つ(4個))が、ほぼ等間隔で取り付けられている。このように、複数の超音波受信部140aが、円周状に配置されていることから、全方向からの超音波信号Su(反射波Rsu)を、効率よく受信することができる。なお、本実施形態の構成では、超音波受信部140,140aを、回転アーム131の先端部と、本体部132の外周との両方に設ける構成例で説明したが、回転アーム131の先端部、および本体部132の外周のいずれかに設ける構成でもよい。
以上説明したように、第2実施形態の駆動装置100では、被駆動部130を回転させる駆動力を出力する駆動源としての圧電アクチュエーター22を超音波信号Suの送波器として利用している。加えて上述の構成を用いることにより、第1実施形態の効果に加え、第2実施形態の駆動装置100では、次のような効果を奏することができる。
(1)第2実施形態の駆動装置100によれば、複数の圧電アクチュエーター22が、円筒状の本体部132の外周に沿って配置され、複数の圧電アクチュエーター22の駆動力により、被駆動部130を回転移動させる。このように、複数の圧電アクチュエーター22が、円周状に配置され、それぞれの圧電アクチュエーター22から超音波信号Suが発信される。これにより、障害物Hの存在する位置(方向)を精度よく検知することができる。また、複数の圧電アクチュエーター22を用いているため、より大きな駆動力(本形態では回転力)を得ることができる。
(2)また、複数の超音波受信部140aが、円周状に配置されていることから、全方向からの超音波信号Su(反射波Rsu)を、効率よく受信することができる。また、超音波信号Suの異常状態を検知した超音波受信部140aを特定することにより、障害物Hの存在位置を覚知することができる。
(第3実施形態)
以下、図7を参照して圧電アクチュエーター22を用いた圧電モーター200について説明する。なお、図7は、第3実施形態に係る圧電モーター200の動作を示す説明図である。また、図7では、圧電アクチュエーター22をネジ等によって不図示の固定枠に固定する固定部Fcについては、図示の都合上、省略している。
第3実施形態に係る圧電モーター200は、前述した圧電アクチュエーター22を備えている。圧電アクチュエーター22は、被駆動部としてのローター230を回転移動させる機能を有している。図7に示すように、圧電アクチュエーター22の突起部PSは、被駆動部としてのローター230の外周に接触している。図7に示す例では、2つの第1の圧電素子PBb1,PBb2の矢印Sの方向への伸縮に応じて、振動板Pdが振動板Pdの平面内で屈曲振動し、これに応じて、突起部PSの先端が矢印Qの向きに往復運動するか、または、楕円運動する。その結果、ローター230は、その中心に位置する回転軸234の周りに所定の方向R(図7では時計回り方向)に回転する。なお、2つの第2の圧電素子PBa1,PBa2(図1参照)に交流電圧または脈流電圧を印加する場合には、ローター230は逆方向に回転する。なお、図4Aを用いて説明したように、中央に位置する第1の圧電素子PLの伸縮に応じて、圧電アクチュエーター22が長手方向に伸縮するので、突起部PSからローター230に与える力をより大きくすることが可能である。
第3実施形態に係る圧電モーター200によれば、以上のように、圧電アクチュエーター22を回転駆動源として用いることができ、より小型の圧電モーター200を提供することができる。
なお、第1実施形態の駆動装置10では、固定された駆動部20に対して被駆動部30が移動方向Dmに沿って移動する構成を例に説明したが、被駆動部30が固定され、駆動部20が被駆動部30に対して移動方向Dmに沿って移動する構成としてもよい。また、第2実施形態の駆動装置100では、本体部132に固定された駆動部20に対して被駆動部130が移動方向Rmに沿って移動する構成を例に説明したが、被駆動部130が固定され、駆動部20が被駆動部130に対して移動方向Rmに沿って移動する構成としてもよい。
また、上述した圧電アクチュエーター22(図2A、および図2B参照)の構造に限定されるものではなく、圧電素子を用いた種々の圧電アクチュエーターを利用することができる。
(第4実施形態)
上述した圧電アクチュエーター22(駆動部20)は、共振を利用することで被駆動部30,130に対して大きな力を与えることができるものであり、各種の装置に適用可能である。圧電アクチュエーター22(駆動部20)は、例えば、ロボット(電子部品搬送装置(ICハンドラー)も含む)、ハンド(指アシスト装置を含む)、投薬用ポンプ、時計のカレンダー送り装置、印刷装置(例えば紙送り機構)等の各種の機器における駆動装置として用いることができる。以下、代表的な実施の形態としてのロボットについて説明する。
以下、上述した圧電アクチュエーター22を圧電モーターとして利用したロボットについて、図8および図9を参照して説明する。図8は、圧電アクチュエーター22(駆動部20)を用いたロボットの一実施形態としてロボットアームを有するロボットを示す説明図である。図9は、エンドエフェクターが取り付けられたロボットアームの手首部分を拡大して示す説明図である。
図8に示すように、ロボット2000は、第1アーム2100および第2アーム2200を少なくとも有するアーム部と、第1アーム2100の先端に取り付けられるエンドエフェクターとしてのロボットハンド3000と、を備えている。
アーム部(「腕部」とも呼ぶ)は、複数本のリンク部2012(「リンク部材」とも呼ぶ)と、それらリンク部2012の間を回動または屈曲可能な状態で接続する複数の関節部2020と、支持部としての基台2010と、を有している。なお、第1アーム2100は、支持部としての基台2010に、基台2010に接続された関節部2020を介して接続され、基台2010に対して相対移動可能である。
また、第2アーム2200は、基台2010と第1アーム2100との間に位置し、基台2010および第1アーム2100のそれぞれと、関節部2020を介して接続されている。なお、第2アーム2200は、基台2010および第1アーム2100のそれぞれと相対移動可能である。
それぞれの関節部2020には、各回動軸X1〜X6について、それぞれ上述した圧電アクチュエーター22(駆動部20)が内蔵されており、圧電アクチュエーター22を用いて関節部2020を各回動軸X1〜X6の周りに任意の角度さけ回動または屈曲させることが可能である。なお、図8には、回動軸X5に対して上述した圧電アクチュエーター22(駆動部20)が設けられている例が示されている。
第1アーム2100の先端には、ロボットハンド3000が接続されている。ロボットハンド3000は、一対の把持部3003を備えている。ロボットハンド3000にも上述した圧電アクチュエーター22(駆動部20)が内蔵されており、圧電アクチュエーター22を用いて把持部3003を開閉して物を把持することが可能である。なお、第1アーム2100の先端には、図示されない受信部としての超音波受信部(図1に示す超音波受信部40)が配設されている。換言すれば、図示されない受信部としての超音波受信部は、第1アーム2100を回転駆動させる圧電アクチュエーター22(駆動部20)よりも先端側に設けられている。
このように、圧電アクチュエーター22よりも先端側に位置する第1アーム2100に受信部としての超音波受信部が設けられていることから、第1アーム2100の可動範囲内の障害物H(図1参照)に近い位置で超音波信号Su(図1参照)を受信することができる。これにより、障害物Hの有無による超音波信号Suの変化を、より精度よく検知することができる。
また、ロボット2000は、図示しないアーム制御部を備えている。アーム制御部は、圧電アクチュエーター22から発信された超音波信号Suの状態を、第1アームの先端部に設けられた受信部としての超音波受信部(不図示)が受信することによって、第1アーム2100の可動範囲内に障害物H(図1参照)が有るか否かを検知し、第1アーム2100と障害物Hとの衝突を回避するための制御を行う。具体的にアーム制御部は、図1に示す駆動装置10の判断部51が第1アーム2100の可動範囲内に障害物Hが有ると判断したときには、第1アーム2100と障害物Hとの衝突を回避するため、第1アーム2100の移動スピードを遅くしたり、第1アーム2100の移動を停止したりする。
上述のようなアーム制御部の制御により、第1アームの2100の可動範囲内に障害物Hが有る場合に、第1アーム2100と障害物Hとの衝突を回避することができる。また、衝突の回避動作において、第1アーム2100の動作を、例えば移動スピードを急減速させたり急停止させたりするなど急激に変化させることを抑制することが可能となり、ロボット2000への負荷を減少させることが可能となる。
図9は、図8に示したロボット2000のロボットハンド3000を含む手首部分の説明図である。手首の関節部2020は、手首回動部2022を挟持しており、手首回動部2022に手首のリンク部2012が、手首回動部2022の回動軸X6周りに回動可能に取り付けられている。手首回動部2022は、上述した駆動装置100(図6A、図6B参照)の複数の圧電アクチュエーター22が内蔵されており、手首のリンク部2012には、図6A、図6Bに示されている駆動装置100および被駆動部130に相当する駆動装置100と、駆動装置100の被駆動部130とを備えている。駆動装置100は、手首のリンク部2012およびロボットハンド3000を回動軸X6周りに回動させる。ロボットハンド3000には、複数本の把持部3003が立設されている。把持部3003の基端部はロボットハンド3000内で移動可能となっており、この把持部3003の根元の部分に駆動装置10(図1参照)の駆動部20の圧電アクチュエーター22が搭載されている。把持部3003の基端部が駆動装置10の被駆動部30に相当する。駆動装置10を動作させることで、把持部3003を移動させて対象物を把持することができる。
なお、ロボットとしては、単腕のロボットに限らず、腕の数が2以上の多腕ロボットにも圧電アクチュエーター22を備えた駆動装置10,100を適用することが可能である。ここで、手首の関節部2020やロボットハンド3000の内部には、圧電アクチュエーター22の他に、力覚センサーやジャイロセンサー等の各種装置に電力を供給する電力線や、信号を伝達する信号線等が含まれ、非常に多くの配線が必要になる。従って、関節部2020やロボットハンド3000の内部に配線を配置することは非常に困難だった。しかしながら、上述した実施形態の圧電アクチュエーター22(駆動部20)は、通常の電動モーターや、従来の圧電駆動装置よりも駆動電流を小さくできるので、関節部2020(特に、第1アーム2100の先端の関節部)やロボットハンド3000のような小さな空間でも配線を配置することが可能になる。
上記説明では、ロボットハンド3000を備えるロボット2000を例にとって説明したが、ロボットハンド3000は、ロボット2000の部品としてのみならず、単独の製品として構成されていても良い。
以上説明したように、本実施形態のロボット2000は、関節部2020に、上記実施形態の圧電アクチュエーター22(図1参照)を備える駆動装置10,100,200が用いられていることにより、関節部2020を介して移動する第1アーム2100を備えたロボット2000の小型化や軽量化を図ることができる。
また、ロボット2000は、複数の関節部2020を備えており、それぞれに超音波信号Su(図1参照)の発信源を兼ねる圧電アクチュエーター22(図1参照)を有していることから、複数位置を起点として複数方向における障害物Hの有無に係る検知を行うことができる。
また、ロボット2000は、圧電アクチュエーター22よりも先端側に位置する第1アーム2100に受信部としての超音波受信部(不図示)が設けられていることから、第1アーム2100の可動範囲内に障害物Hが有る場合に、障害物Hに近い位置で超音波信号Suを受信することができる。これにより、障害物Hの有無による超音波信号Suの変化を、より精度よく検知することが可能となる。
本発明は、上述の実施形態や応用例に限られるものではなく、その趣旨を逸脱しない範囲において種々の構成で実現することができる。例えば、発明の概要の欄に記載した各形態中の技術的特徴に対応する実施形態中の技術的特徴は、上述の課題の一部または全部を解決するために、あるいは、上述の効果の一部または全部を達成するために、適宜、差し替えや組み合わせを行うことが可能である。また、その技術的特徴が本明細書中に必須なものとして説明されていなければ、適宜、削除することが可能である。