JP6711723B2 - インクジェット記録装置およびインクジェット記録方法 - Google Patents
インクジェット記録装置およびインクジェット記録方法 Download PDFInfo
- Publication number
- JP6711723B2 JP6711723B2 JP2016156678A JP2016156678A JP6711723B2 JP 6711723 B2 JP6711723 B2 JP 6711723B2 JP 2016156678 A JP2016156678 A JP 2016156678A JP 2016156678 A JP2016156678 A JP 2016156678A JP 6711723 B2 JP6711723 B2 JP 6711723B2
- Authority
- JP
- Japan
- Prior art keywords
- nozzle
- nozzles
- pixel
- recording
- ink
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/21—Ink jet for multi-colour printing
- B41J2/2132—Print quality control characterised by dot disposition, e.g. for reducing white stripes or banding
- B41J2/2139—Compensation for malfunctioning nozzles creating dot place or dot size errors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J3/00—Typewriters or selective printing or marking mechanisms characterised by the purpose for which they are constructed
- B41J3/54—Typewriters or selective printing or marking mechanisms characterised by the purpose for which they are constructed with two or more sets of type or printing elements
- B41J3/543—Typewriters or selective printing or marking mechanisms characterised by the purpose for which they are constructed with two or more sets of type or printing elements with multiple inkjet print heads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
- B41J2/04525—Control methods or devices therefor, e.g. driver circuits, control circuits reducing occurrence of cross talk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
- B41J2/04545—Dynamic block driving
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
- B41J2/0458—Control methods or devices therefor, e.g. driver circuits, control circuits controlling heads based on heating elements forming bubbles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/135—Nozzles
- B41J2/145—Arrangement thereof
- B41J2/15—Arrangement thereof for serial printing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/21—Ink jet for multi-colour printing
- B41J2/2132—Print quality control characterised by dot disposition, e.g. for reducing white stripes or banding
- B41J2/2146—Print quality control characterised by dot disposition, e.g. for reducing white stripes or banding for line print heads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
- B41J29/393—Devices for controlling or analysing the entire machine ; Controlling or analysing mechanical parameters involving printing of test patterns
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/21—Ink jet for multi-colour printing
- B41J2/2107—Ink jet for multi-colour printing characterised by the ink properties
Description
図1(a)は、本実施形態で採用するフルライン型のインクジェット記録装置の内部構成図である。用紙供給部101から供給される用紙P(記録媒体)は、搬送ローラ対103および104に挟持されながら、x方向に所定の速度で搬送され、排出部102より排出される。搬送方向(+x方向)において、上流側の搬送ローラ対103と下流側の搬送ローラ対104の間には記録ヘッド105〜108が配列しており、記録データに従ってz方向にインクを吐出する。記録ヘッド105〜108は、シアン、マゼンタ、イエローおよびブラックのインクを吐出し、それぞれのインクは不図示のチューブを介して供給されている。
本実施形態においても、図1(a)および図2で説明したインクジェット記録装置を用いる。但し、本実施形態の記録ヘッドにおいては、ノズルのリフィル時間が十分に短く(あるいは用紙の搬送速度が十分に遅く)、x方向に配列する複数の画素に対し1つのノズルから連続吐出が可能とする。一方、吐出動作に伴うクロストークの影響は第1の実施形態よりも大きく、補完先候補選択部212は、なるべくクロストークの影響が現れないようなノズルを、補完候補に選出するものとする。
本実施形態においても、図1(a)および図2で説明したインクジェット記録装置を用いる。また、図11で示した配列の記録ヘッドを用い、図12で示したブロック駆動を採用する。更に、第1実施形態と同様に図2に示したブロック図を採用し、図9に示したフローチャートに従って、図16に示した順番で、所定の不吐補完処理を1つずつ行うものとする。本実施形態では、xy方向において、リフィル時間についてもクロストークについても制限を設けながら不吐補完処理を行う場合について説明する。
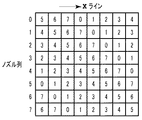
図11で示したノズル配列の場合、個々のノズル列の着弾位置は1画素内(SEG内)で少しずつy方向にずれているため、非吐出ノズルが記録しようとする位置と補完先ノズルが実際に記録する位置にはずれが発生し、これが画像内で目立ってしまう場合がある。例えば、ノズル列0に吐出不良ノズルが発生した場合、補完先がノズル列4であればy方向の同じ位置にドットを記録することは出来るが、ノズル列1〜3および5〜7では、600dpiの1画素範囲内でのずれが生じる。そして、そのずれ量はノズル列4、ノズル列1と5、ノズル列2と6、ノズル列3と7の順に大きくなる。すなわち、ずれ量が大きいほど補完処理が目立ってしまうような場合、補完先として好ましいノズル列の優先順序はノズル列に応じて異なることになる。本実施形態では、このような状況を鑑み、優先度情報保持部214には、それぞれのノズル列に対応づけた複数の優先度情報を記憶しておく。
さらに、図5、図13、図21に個々のノズルが安定した吐出状態を満足するための条件を示したが、本発明はこのような条件に限定されるものではない。
110 印刷制御部
205 不吐情報バッファ
206 記録バッファ
207 記録データ生成部
208 不吐補完処理部
211 不吐補完読み出し部
212 補完先候補選択部
213 補完先決定部
215 補完処理部
216 CPU
Claims (14)
- インクを吐出する複数のノズルが第1の方向に配列して成るノズル列を有し、複数の前記ノズル列は前記第1の方向と交差する第2の方向に並び、前記複数のノズル列各々に含まれ、同じ画素のデータに基づくドットを記録可能な複数のノズルは、前記第1の方向において、第1のノズル列のノズルと第2のノズル列のノズルとのずれ量と、第1のノズル列のノズルと第3のノズル列のノズルとのずれ量とではずれ量が異なるように、前記複数のノズル列が前記第1の方向にずれて配置されている記録ヘッドを備え、前記記録ヘッドに対し記録媒体を前記第2の方向に相対的に移動させながら前記記録媒体に画像を記録するインクジェット記録装置であって、
各画素に対するインクの吐出または非吐出を定める前記複数のノズル列毎の記録データを生成する生成手段と、
前記複数のノズル列のうちの吐出不良ノズルの情報を取得する取得手段と、
前記記録データにおいて前記情報が示す吐出不良ノズルに対応する画素に対してインクの吐出が定められている場合、前記吐出不良ノズルが属するノズル列と異なるノズル列に属し決定された補完先ノズルから当該画素に対してインクを吐出するように、前記記録データを補完する補完手段と、を有し、
前記補完手段は、補完先ノズルは前記情報が示す吐出不良ノズルでないという第1の条件と、前記複数のノズル列夫々についての、前記補完の対象となる画素から前記第1の方向においてN(NはN≧1を満たす整数)個目までの画素の記録データに基づいて、前記補完の対象となる画素から前記第1の方向においてN個目までの画素に対して、前記補完先ノズルが属するノズル列のノズルからはインクの吐出が定められていないという第2の条件と、の両方を満たすノズルのうち、前記吐出不良ノズルと前記第1の方向へのずれが小さいノズルを優先して前記補完先ノズルに決定し、前記第2の条件を満たすか否かについては、前記補完の対象となる画素から前記第1の方向においてN個目までの画素の記録データに基づいて判断することを特徴とするインクジェット記録装置。 - 前記補完手段は、前記補完先ノズルに対応する画素に対する前記第2の方向における周囲のM(MはM≧1を満たす整数)個の画素に対してはインクの吐出が定められないという第3の条件と、を更に満たすように、前記補完先ノズルを決定することを特徴とする請求項1に記載のインクジェット記録装置。
- インクを吐出する複数のノズルが第1の方向に配列して成るノズル列を有し、複数の前記ノズル列は前記第1の方向と交差する第2の方向に並び、前記複数のノズル列各々に含まれ、同じ画素のデータに基づくドットを記録可能な複数のノズルは、前記第1の方向において、第1のノズル列のノズルと第2のノズル列のノズルとのずれ量と、第1のノズル列のノズルと第3のノズル列のノズルとのずれ量とではずれ量が異なるように、前記複数のノズル列が前記第1の方向にずれて配置されている記録ヘッドを備え、前記記録ヘッドに対し記録媒体を前記第2の方向に相対的に移動させながら前記記録媒体に画像を記録するインクジェット記録装置であって、
各画素に対するインクの吐出または非吐出を定める前記複数のノズル列毎の記録データを生成する生成手段と、
前記複数のノズル列のうちの吐出不良ノズルの情報を取得する取得手段と、
前記記録データにおいて前記情報が示す吐出不良ノズルに対応する画素に対してインクの吐出が定められている場合、前記吐出不良ノズルが属するノズル列と異なるノズル列に属し決定された補完先ノズルから当該画素に対してインクを吐出するように、前記記録データを補完する補完手段と、を有し、
前記補完手段は、補完先ノズルは前記情報が示す吐出不良ノズルでないという第1の条件と、前記複数のノズル列夫々についての、前記補完の対象となる画素から前記第2の方向においてM(MはM≧1を満たす整数)個目までの画素の記録データに基づいて、前記補完の対象となる画素から前記第2の方向においてM個目までの画素に対して、前記補完先ノズルが属するノズル列のノズルからはインクの吐出が定められていないという第2の条件と、の両方を満たすノズルのうち、前記吐出不良ノズルと前記第1の方向へのずれが小さいノズルを優先して前記補完先ノズルに決定し、前記第2の条件を満たすか否かについては、前記補完の対象となる画素から前記第2の方向においてM個目までの画素の記録データに基づいて判断することを特徴とするインクジェット記録装置。 - 前記補完手段は、前記第1の条件と前記第2の条件の両方を満たす複数の補完先候補ノズルを決定し、前記複数の補完先候補ノズルの中から1つの前記補完先ノズルを決定することを特徴とする請求項1ないし3のいずれか1項に記載のインクジェット記録装置。
- 前記補完手段は、補完先ノズルの優先順位が定められた優先度情報に従って、前記複数の補完先候補ノズルの中から1つの前記補完先ノズルを決定することを特徴とする請求項4に記載のインクジェット記録装置。
- 前記複数のノズル列のうち、一部のノズル列のノズルは前記第1の方向に互いに同じ位置に配置され、且つ、他のノズル列は前記第1の方向に互いに異なる位置に配置されることを特徴とする請求項1ないし5のいずれか1項に記載のインクジェット記録装置。
- 前記第2の方向において前記第1のノズル列と前記第2のノズル列、前記第3のノズル列は並んで配列されており、前記第1のノズル列のノズルの前記補完先ノズルとして、前記第2のノズル列のノズルの方が前記第3のノズル列のノズルよりも優先して決定されるように、前記補完先ノズルの優先順位が定められていることを特徴とする請求項5に記載のインクジェット記録装置。
- 前記記録ヘッドの前記複数のノズルは前記第1の方向に前記記録媒体に対応する長さ配列され、
前記記録媒体を移動させる移動手段を有し、
前記移動手段が前記記録媒体を移動させながら前記記録ヘッドからインクを吐出することによって前記記録媒体に画像を記録する請求項1ないし7のいずれか1項に記載のインクジェット記録装置。 - 前記記録媒体の単位領域に対して、前記記録ヘッドと前記記録媒体を相対的に移動させながらインクを吐出する複数回の記録走査を行う走査手段を更に有し、
前記生成手段は、画像データを前記複数回の記録走査に分配することにより、前記複数回の記録走査それぞれに対応する複数の記録データを生成することを特徴とする請求項1ないし7のいずれか1項に記載のインクジェット記録装置。 - 前記補完手段による前記記録データの補完が行われた後の記録データは、各ノズルの駆動率が1/(N+1)未満となるように定められていることを特徴とする請求項1に記載のインクジェット記録装置。
- 前記補完手段による前記記録データの補完が行われた後の記録データは、各ノズルの駆動率が1/(M+1)未満となるように定められていることを特徴とする請求項3に記載のインクジェット記録装置。
- インクを吐出する複数のノズルが第1の方向に配列して成るノズル列を有し、複数の前記ノズル列は前記第1の方向と交差する第2の方向に並び、前記複数のノズル列各々に含まれ、同じ画素のデータに基づくドットを記録可能な複数のノズルは、前記第1の方向において、第1のノズル列のノズルと第2のノズル列のノズルとのずれ量と、第1のノズル列のノズルと第3のノズル列のノズルとのずれ量とではずれ量が異なるように、前記複数のノズル列が前記第1の方向にずれて配置されている記録ヘッドを用い、前記記録ヘッドに対し記録媒体を前記第2の方向に相対的に移動させながら前記記録媒体に画像を記録するインクジェット記録方法であって、
各画素に対するインクの吐出または非吐出を定める前記複数のノズル列毎の記録データを生成する生成工程と、
前記複数のノズル列のうちの吐出不良ノズルの情報を取得する取得工程と、
前記記録データにおいて前記情報が示す吐出不良ノズルに対応する画素に対してインクの吐出が定められている場合、前記吐出不良ノズルが属するノズル列と異なるノズル列に属し決定された補完先ノズルから当該画素に対してインクを吐出するように、前記記録データを補完する補完工程と、を有し、
前記補完工程は、補完先ノズルは前記情報が示す吐出不良ノズルでないという第1の条件と、前記複数のノズル列夫々についての、前記補完の対象となる画素から前記第1の方向においてN(NはN≧1を満たす整数)個目までの画素の記録データに基づいて、前記補完の対象となる画素から前記第1の方向においてN個目までの画素に対して、前記補完先ノズルが属するノズル列のノズルからはインクの吐出が定められていないという第2の条件と、の両方を満たすノズルのうち、前記吐出不良ノズルと前記第1の方向へのずれが小さいノズルを優先して前記補完先ノズルに決定し、前記第2の条件を満たすか否かについては、前記補完の対象となる画素から前記第1の方向においてN個目までの画素の記録データに基づいて判断することを特徴とするインクジェット記録方法。 - 前記補完工程は、前記補完先ノズルに対応する画素に対する前記第2の方向における周囲のM(MはM≧1を満たす整数)個の画素に対してはインクの吐出が行われないという第3の条件と、を更に満たすように、前記補完先ノズルを決定することを特徴とする請求項12に記載のインクジェット記録方法。
- インクを吐出する複数のノズルが第1の方向に配列して成るノズル列を有し、複数の前記ノズル列は前記第1の方向と交差する第2の方向に並び、前記複数のノズル列各々に含まれ、同じ画素のデータに基づくドットを記録可能な複数のノズルは、前記第1の方向において、第1のノズル列のノズルと第2のノズル列のノズルとのずれ量と、第1のノズル列のノズルと第3のノズル列のノズルとのずれ量とではずれ量が異なるように、前記複数のノズル列が前記第1の方向にずれて配置されている記録ヘッドを用い、前記記録ヘッドに対し記録媒体を前記第2の方向に相対的に移動させながら前記記録媒体に画像を記録するインクジェット記録方法であって、
各画素に対するインクの吐出または非吐出を定める前記複数のノズル列毎の記録データを生成する生成工程と、
前記複数のノズル列のうちの吐出不良ノズルの情報を取得する取得工程と、
前記記録データにおいて前記情報が示す吐出不良ノズルに対応する画素に対してインクの吐出が定められている場合、前記吐出不良ノズルが属するノズル列と異なるノズル列に属し決定された補完先ノズルから当該画素に対してインクを吐出するように、前記記録データを補完する補完工程と、を有し、
前記補完工程は、補完先ノズルは前記情報が示す吐出不良ノズルでないという第1の条件と、前記複数のノズル列夫々についての、前記補完の対象となる画素から前記第2の方向においてM(MはM≧1を満たす整数)個目までの画素の記録データに基づいて前記補完の対象となる画素から前記第2の方向においてM個目までの画素に対して、前記補完先ノズルが属するノズル列のノズルからはインクの吐出が定められていないという第2の条件と、の両方を満たすノズルのうち、前記吐出不良ノズルと前記第1の方向へのずれが小さいノズルを優先して前記補完先ノズルに決定し、前記第2の条件を満たすか否かについては、前記補完の対象となる画素から前記第2の方向においてM個目までの画素の記録データに基づいて判断することを特徴とするインクジェット記録方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016156678A JP6711723B2 (ja) | 2016-08-09 | 2016-08-09 | インクジェット記録装置およびインクジェット記録方法 |
| US15/657,512 US10293620B2 (en) | 2016-08-09 | 2017-07-24 | Inkjet printing apparatus and inkjet printing method |
| CN201710675376.6A CN107696712B (zh) | 2016-08-09 | 2017-08-09 | 喷墨打印装置和喷墨打印方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016156678A JP6711723B2 (ja) | 2016-08-09 | 2016-08-09 | インクジェット記録装置およびインクジェット記録方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018024144A JP2018024144A (ja) | 2018-02-15 |
| JP2018024144A5 JP2018024144A5 (ja) | 2019-05-09 |
| JP6711723B2 true JP6711723B2 (ja) | 2020-06-17 |
Family
ID=61160061
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016156678A Active JP6711723B2 (ja) | 2016-08-09 | 2016-08-09 | インクジェット記録装置およびインクジェット記録方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10293620B2 (ja) |
| JP (1) | JP6711723B2 (ja) |
| CN (1) | CN107696712B (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110202936B (zh) * | 2018-02-28 | 2020-12-08 | 森大(深圳)技术有限公司 | 基于状态图检测喷嘴是否异常的方法、装置、设备及介质 |
| JP7047513B2 (ja) * | 2018-03-19 | 2022-04-05 | 株式会社リコー | 液体吐出装置、不吐出ノズル補完方法及びプログラム |
| JP2020023178A (ja) * | 2018-08-07 | 2020-02-13 | キヤノン株式会社 | 記録装置及びその検査方法 |
| US10960695B2 (en) | 2018-08-07 | 2021-03-30 | Canon Kabushiki Kaisha | Printing apparatus and correction method therefor |
| JP2020026036A (ja) * | 2018-08-09 | 2020-02-20 | 京セラドキュメントソリューションズ株式会社 | インクジェット記録装置及び画像形成方法 |
| CN110053361B (zh) * | 2019-05-14 | 2020-10-09 | 微特智能科技(南通)有限公司 | 基于pcb喷墨打印机的打印缺陷弥补方法及系统 |
| JP7363183B2 (ja) * | 2019-08-13 | 2023-10-18 | コニカミノルタ株式会社 | 画像形成装置、画像データ調整方法および画像データ調整プログラム |
| JP7357240B2 (ja) * | 2020-02-25 | 2023-10-06 | パナソニックIpマネジメント株式会社 | インクジェット印刷装置の制御方法、及び、インクジェット印刷装置 |
| EP3882036A1 (de) * | 2020-03-20 | 2021-09-22 | Heidelberger Druckmaschinen AG | Koaleszenz der kompensationsdüsen |
| CN114385094B (zh) * | 2020-10-16 | 2023-07-14 | 深圳市汉森软件有限公司 | Onepass打印异常喷嘴补偿方法、装置、设备及介质 |
| CN114734730B (zh) * | 2021-01-07 | 2023-06-09 | 深圳市汉森软件有限公司 | 异常喷嘴补偿打印方法、装置、设备及存储介质 |
| CN113211980B (zh) * | 2021-04-21 | 2022-04-22 | 华南理工大学 | 一种用于印刷oled器件的压电控制系统及优化方法 |
| CN113580769B (zh) * | 2021-07-08 | 2022-08-02 | 浙江海印数码科技有限公司 | 一种喷墨印刷装置及故障喷头补偿方法 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH106488A (ja) * | 1996-06-24 | 1998-01-13 | Canon Inc | インクジェット記録方法及びその装置 |
| JP3472250B2 (ja) * | 2000-09-01 | 2003-12-02 | キヤノン株式会社 | インクジェットプリント方法および装置 |
| US6533380B1 (en) * | 2001-09-12 | 2003-03-18 | Xerox Corporation | Method and apparatus for reducing neighbor cross-talk and increasing robustness of an acoustic printing system against isolated ejector failure |
| JP4164305B2 (ja) * | 2002-07-24 | 2008-10-15 | キヤノン株式会社 | インクジェット記録方法およびインクジェット記録装置 |
| JP4266593B2 (ja) * | 2002-08-23 | 2009-05-20 | キヤノン株式会社 | 記録装置及びその制御方法 |
| KR100636325B1 (ko) * | 2004-12-14 | 2006-10-18 | 삼성전자주식회사 | 프린터의 미싱 노즐 보상 방법 및 이를 이용하는 프린터 |
| JP2006231857A (ja) * | 2005-02-28 | 2006-09-07 | Canon Inc | インクジェット記録方法 |
| JP2006341458A (ja) * | 2005-06-08 | 2006-12-21 | Canon Inc | インクジェット記録ヘッド、該ヘッドを用いるインクジェット記録装置および前記ヘッドの駆動方法 |
| US7338144B2 (en) * | 2005-09-29 | 2008-03-04 | Xerox Corporation | Ink jet printer having print head with partial nozzle redundancy |
| JP2008273014A (ja) * | 2007-04-27 | 2008-11-13 | Canon Inc | 記録装置及び記録装置の制御方法 |
| US7866779B2 (en) * | 2007-11-16 | 2011-01-11 | Hewlett-Packard Development Company, L.P. | Defective nozzle replacement in a printer |
| US8608271B2 (en) | 2009-03-31 | 2013-12-17 | Canon Kabushiki Kaisha | Printing apparatus and printing method |
| JP2010269521A (ja) * | 2009-05-21 | 2010-12-02 | Canon Inc | ラインヘッド型インクジェット記録装置 |
| JP5737864B2 (ja) | 2010-06-03 | 2015-06-17 | キヤノン株式会社 | インクジェット記録装置及び記録方法 |
| JP5815929B2 (ja) | 2010-08-05 | 2015-11-17 | キヤノン株式会社 | 記録装置及び記録方法 |
| JP2014012396A (ja) | 2012-06-08 | 2014-01-23 | Canon Inc | インクジェット記録装置 |
| JP5584733B2 (ja) | 2012-06-08 | 2014-09-03 | キヤノン株式会社 | 記録装置及び印刷物の排出方法 |
| EP2952355A1 (en) * | 2014-05-02 | 2015-12-09 | OCE-Technologies B.V. | Method for compensating a failing nozzle |
-
2016
- 2016-08-09 JP JP2016156678A patent/JP6711723B2/ja active Active
-
2017
- 2017-07-24 US US15/657,512 patent/US10293620B2/en active Active
- 2017-08-09 CN CN201710675376.6A patent/CN107696712B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN107696712A (zh) | 2018-02-16 |
| US10293620B2 (en) | 2019-05-21 |
| CN107696712B (zh) | 2020-09-29 |
| JP2018024144A (ja) | 2018-02-15 |
| US20180043681A1 (en) | 2018-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6711723B2 (ja) | インクジェット記録装置およびインクジェット記録方法 | |
| US20090315932A1 (en) | Method and system for high speed multi-pass inkjet printing | |
| JP6095398B2 (ja) | 記録装置及び記録方法 | |
| JP5776348B2 (ja) | 画像形成装置及び画像形成方法 | |
| US10183485B2 (en) | Method of printing in a multipass mode and a printing apparatus for implementing such a method | |
| JP5603184B2 (ja) | 記録装置及び記録方法 | |
| JP2012061841A (ja) | 記録装置及び記録方法 | |
| JP2015042453A (ja) | 液滴吐出方法および液滴吐出装置 | |
| JP2017087431A (ja) | 液滴吐出装置および液滴吐出方法 | |
| JP2016175373A (ja) | 液滴吐出方法および液滴吐出装置 | |
| JP2015042452A (ja) | 液滴吐出方法および液滴吐出装置 | |
| JP2014008660A (ja) | インクジェット記録装置、及び、マスクパターン生成方法 | |
| JP2007276353A (ja) | インクジェット記録装置、インクジェット記録装置の記録制御方法、プログラム及び記憶媒体 | |
| JP6862124B2 (ja) | 画像処理装置および画像処理方法 | |
| JP2009000837A (ja) | 液体吐出装置及び液体吐出方法 | |
| JP2018187925A (ja) | 記録装置および記録方法 | |
| JP5885606B2 (ja) | 画像形成装置 | |
| JP5560015B2 (ja) | インクジェット記録装置およびインクジェット記録方法 | |
| KR100799389B1 (ko) | 인접 노즐을 사용하는 잉크젯의 오류 허용 | |
| JP2022018678A (ja) | ラインヘッドプリンターおよび吐出制御方法 | |
| JP2009166366A (ja) | 液体吐出装置、及び、ドット形成方法 | |
| JP2023070924A (ja) | 記録装置、及び、記録装置を制御するための方法 | |
| JP2011136500A (ja) | 印刷システム、プログラム、及び、印刷装置 | |
| JP2011093206A (ja) | 液体吐出装置、及び、液体吐出方法 | |
| JP2009001025A (ja) | 液体吐出装置及び液体吐出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181129 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190326 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191029 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200428 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200528 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6711723 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |