JP6700575B2 - 回路装置、光検出器、物体検出装置、センシング装置、移動体装置、光検出方法、及び物体検出方法 - Google Patents
回路装置、光検出器、物体検出装置、センシング装置、移動体装置、光検出方法、及び物体検出方法 Download PDFInfo
- Publication number
- JP6700575B2 JP6700575B2 JP2015187568A JP2015187568A JP6700575B2 JP 6700575 B2 JP6700575 B2 JP 6700575B2 JP 2015187568 A JP2015187568 A JP 2015187568A JP 2015187568 A JP2015187568 A JP 2015187568A JP 6700575 B2 JP6700575 B2 JP 6700575B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- voltage signal
- undershoot
- time
- circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4861—Circuits for detection, sampling, integration or read-out
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
Description
・高価な素子を使う必要があること
・ノイズが増えること
・増幅回路においてゲインを大きくとることが難しくなること
というような問題があり、コストとS/Nの点で著しく不利になる。
Claims (22)
- 受光素子の出力電流に基づく電圧信号にアンダーシュートを発生させる波形処理回路と、
前記アンダーシュートが発生した前記電圧信号を、閾値を基準に二値化する二値化回路と、を備え、
前記波形処理回路は、増幅回路と、該増幅回路の後段に設けられたフィルタ回路と、を含み、
前記フィルタ回路は、前記電圧信号に前記アンダーシュートが発生してからグラウンドレベルに復帰するまでの時間を前記電圧信号のリンギングの整定時間よりも長くする回路装置。 - 前記アンダーシュートが発生した前記電圧信号のリンギング時の最大値は、前記閾値以下であることを特徴とする請求項1に記載の回路装置。
- 前記増幅回路は、前記アンダーシュートが発生するように増幅率が設定されていることを特徴とする請求項1又は2に記載の回路装置。
- 前記増幅回路の周波数帯域及び増幅率は、前記アンダーシュートが発生した前記電圧信号のリンギング時の最大値が前記閾値以下となるように設定されていることを特徴とする請求項3に記載の回路装置。
- 前記フィルタ回路は、前記アンダーシュートを誘起することを特徴とする請求項1〜4のいずれか一項に記載の回路装置。
- 前記フィルタ回路は、ハイパスフィルタであることを特徴とする請求項1〜5のいずれか一項に記載の回路装置。
- 前記フィルタ回路は、前記アンダーシュートが発生した前記電圧信号のリンギング時の最大値が前記閾値以下となるように時定数が設定されていることを特徴とする請求項1〜6のいずれか一項に記載の回路装置。
- 前記波形処理回路は、前記出力電流を前記電圧信号に変換する電流電圧変換器を更に含むことを特徴とする請求項1〜7のいずれか一項に記載の回路装置。
- 請求項1〜8のいずれか一項に記載の回路装置と、
前記受光素子と、を備える光検出器。 - 発光素子を発光させて光を投光する投光手段と、
前記投光手段から投光され物体で反射された光を前記受光素子で受光する請求項9に記載の光検出器と、
前記発光素子での発光タイミングと前記受光素子での受光タイミングとに基づいて、前記物体までの距離を算出する距離算出手段と、を備える物体検出装置。 - 前記距離算出手段は、前記アンダーシュートが発生した前記電圧信号の立ち上りが前記閾値に一致する第1のタイミングと、該電圧信号の立ち下りが前記閾値に一致する第2のタイミングとに基づいて、前記受光タイミングを求めることを特徴とする請求項10に記載の物体検出装置。
- 前記距離算出手段は、前記第1及び第2のタイミングの中間タイミングを前記受光タイミングとして求めることを特徴とする請求項11に記載の物体検出装置。
- 前記発光素子はパルス発光し、
前記発光素子から出力される発光パルスの半値全幅が150ns以下であることを特徴とする請求項10〜12のいずれか一項に記載の物体検出装置。 - 前記発光素子はパルス発光し、
前記発光素子から出力される発光パルスの立ち上り時間、立ち下り時間をそれぞれTr1、Tf1とし、前記電圧信号の立ち上り時間、立ち下り時間をそれぞれTr2、Tf2としたときに、Tf1/Tr1>Tf2/Tr2を満たすことを特徴とする請求項10〜13のいずれか一項に記載の物体検出装置。 - 前記発光素子は、半導体レーザであることを特徴とする請求項10〜14のいずれか一項に記載の物体検出装置。
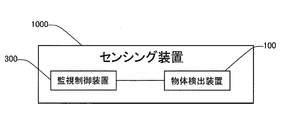
- 請求項10〜15のいずれか一項に記載の物体検出装置と、
前記物体検出装置の出力に基づいて、物体の有無、物体の移動方向及び移動速度の少なくとも1つを含む移動情報を求める監視制御装置と、を備えるセンシング装置。 - 前記監視制御装置は、前記物体の位置情報及び移動情報の少なくとも一方に基づいて危険の有無を判断することを特徴とする請求項16に記載のセンシング装置。
- 移動体と、
前記移動体に搭載される請求項10〜15のいずれか一項に記載の物体検出装置又は前記移動体に搭載される請求項16若しくは17に記載のセンシング装置と、を備える移動体装置。 - 受光素子で光を受光する工程と、
前記受光素子の出力電流を電圧信号に変換する工程と、
前記電圧信号にアンダーシュートを発生させる工程と、
前記電圧信号に前記アンダーシュートが発生してからグラウンドレベルに復帰するまでの時間を前記電圧信号のリンギングの整定時間よりも長くする工程と、
前記アンダーシュートが発生した前記電圧信号を二値化する工程と、
前記二値化したタイミングに基づいて前記受光素子での受光タイミングを求める工程と、を含む光検出方法。 - 発光素子を発光させて光を投光する工程と、
投光され物体で反射された光を受光素子で受光する工程と、
前記受光素子の出力電流を電圧信号に変換する工程と、
前記電圧信号にアンダーシュートを発生させる工程と、
前記電圧信号に前記アンダーシュートが発生してからグラウンドレベルに復帰するまでの時間を前記電圧信号のリンギングの整定時間よりも長くする工程と、
前記アンダーシュートが発生した前記電圧信号を二値化する工程と、
前記二値化したタイミングに基づいて前記受光素子での受光タイミングを求める工程と、
前記発光素子での発光タイミングと前記受光タイミングとに基づいて、前記物体までの距離を算出する工程と、を含む物体検出方法。 - 受光素子と、
前記受光素子の出力電流に基づく電圧信号にアンダーシュートを発生させる波形処理回路と、
前記アンダーシュートが発生した前記電圧信号を、閾値を基準に二値化する二値化回路と、を備え、
前記波形処理回路は、増幅回路と、該増幅回路の後段に設けられたフィルタ回路と、を含み、
前記フィルタ回路は、前記電圧信号に前記アンダーシュートが発生してからグラウンドレベルに復帰するまでの時間を前記電圧信号のリンギングの整定時間よりも長くする光検出器。 - 前記アンダーシュートが発生した前記電圧信号のリンギング時の最大値は、前記閾値以下であることを特徴とする請求項21に記載の光検出器。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015187568A JP6700575B2 (ja) | 2015-09-25 | 2015-09-25 | 回路装置、光検出器、物体検出装置、センシング装置、移動体装置、光検出方法、及び物体検出方法 |
| EP16189047.0A EP3147690B1 (en) | 2015-09-25 | 2016-09-15 | Circuit device, optical detector, object detector, sensor, and movable device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015187568A JP6700575B2 (ja) | 2015-09-25 | 2015-09-25 | 回路装置、光検出器、物体検出装置、センシング装置、移動体装置、光検出方法、及び物体検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017062169A JP2017062169A (ja) | 2017-03-30 |
| JP6700575B2 true JP6700575B2 (ja) | 2020-05-27 |
Family
ID=57286194
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015187568A Active JP6700575B2 (ja) | 2015-09-25 | 2015-09-25 | 回路装置、光検出器、物体検出装置、センシング装置、移動体装置、光検出方法、及び物体検出方法 |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3147690B1 (ja) |
| JP (1) | JP6700575B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6780308B2 (ja) | 2016-06-10 | 2020-11-04 | 株式会社リコー | 物体検出装置、センシング装置及び移動体装置 |
| KR102019382B1 (ko) * | 2017-09-29 | 2019-09-06 | 현대오트론 주식회사 | 거리 검출 센서 및 그것의 동작 방법 |
| JP2019158693A (ja) * | 2018-03-15 | 2019-09-19 | 株式会社リコー | 受光装置、物体検出装置、距離測定装置、移動体装置、ノイズ計測方法、物体検出方法及び距離測定方法 |
| US10691926B2 (en) * | 2018-05-03 | 2020-06-23 | Analog Devices, Inc. | Single-pixel sensor |
| EP3821274A4 (en) * | 2018-07-12 | 2022-02-23 | Shenzhen Xpectvision Technology Co., Ltd. | HIGH TIME RESOLUTION LIDAR |
| JP7131180B2 (ja) * | 2018-07-30 | 2022-09-06 | 株式会社リコー | 測距装置、測距方法、プログラム、移動体 |
| JP7176364B2 (ja) * | 2018-11-13 | 2022-11-22 | 株式会社リコー | 距離情報取得装置および距離情報取得方法 |
| US11500074B2 (en) | 2018-12-14 | 2022-11-15 | Beijing Voyager Technology Co., Ltd. | Light detection and ranging (LiDAR) with pulse equalizer |
| JP7255259B2 (ja) | 2019-03-19 | 2023-04-11 | 株式会社リコー | 検出装置、測距装置、時間測定方法、プログラム、移動体 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2765462A (en) * | 1947-09-10 | 1956-10-02 | Onera (Off Nat Aerospatiale) | Signaling systems |
| JP3141119B2 (ja) * | 1992-02-21 | 2001-03-05 | 株式会社トプコン | パルス信号検出装置及び光波距離計 |
| JPH0634758A (ja) * | 1992-07-17 | 1994-02-10 | Mitsubishi Electric Corp | 車載用測距装置 |
| JPH08211152A (ja) * | 1994-11-04 | 1996-08-20 | Nikon Corp | 距離センサ |
| JP2002333487A (ja) * | 2001-05-08 | 2002-11-22 | Sunx Ltd | 光電センサ |
| DE10153270A1 (de) * | 2001-10-29 | 2003-05-08 | Sick Ag | Optoelektronische Entfernungsmesseinrichtung |
| JP4898176B2 (ja) * | 2005-09-26 | 2012-03-14 | 株式会社トプコン | 測量装置及び測量方法 |
| JP4116052B2 (ja) * | 2006-09-14 | 2008-07-09 | 北陽電機株式会社 | 測距装置 |
| JP5598831B2 (ja) | 2007-09-05 | 2014-10-01 | 北陽電機株式会社 | 走査式測距装置 |
| JP5082704B2 (ja) | 2007-09-13 | 2012-11-28 | 株式会社デンソーウェーブ | レーザレーダ装置 |
| JP2009178008A (ja) * | 2008-01-28 | 2009-08-06 | Panasonic Electric Works Co Ltd | 電力供給システム、アウトレット及び電気機器 |
| JP5683782B2 (ja) * | 2008-12-25 | 2015-03-11 | 株式会社トプコン | 距離測定装置及び距離測定方法 |
| JP5251858B2 (ja) | 2009-12-21 | 2013-07-31 | 株式会社デンソーウェーブ | レーザレーダ装置 |
| JP5617554B2 (ja) | 2010-11-17 | 2014-11-05 | 株式会社デンソー | 距離測定装置、および距離測定プログラム |
| DE102011056963C5 (de) * | 2011-12-23 | 2018-03-01 | Sick Ag | Messung von Entfernungen nach dem Signallaufzeitprinzip |
| US20130250272A1 (en) * | 2012-03-21 | 2013-09-26 | David Ludwig | Threshold Detection Method, Module and Readout Integrated Circuit Layer for LIDAR Time of Flight System Using Differentiated Gaussian Signal |
| JP5965249B2 (ja) | 2012-08-23 | 2016-08-03 | ミネベア株式会社 | ロータの成形方法および成形金型 |
| JP2015165195A (ja) | 2014-03-03 | 2015-09-17 | 株式会社リコー | 距離測定装置、移動体、及び距離測定方法 |
-
2015
- 2015-09-25 JP JP2015187568A patent/JP6700575B2/ja active Active
-
2016
- 2016-09-15 EP EP16189047.0A patent/EP3147690B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3147690A1 (en) | 2017-03-29 |
| EP3147690B1 (en) | 2019-02-20 |
| JP2017062169A (ja) | 2017-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6700575B2 (ja) | 回路装置、光検出器、物体検出装置、センシング装置、移動体装置、光検出方法、及び物体検出方法 | |
| JP6700586B2 (ja) | 回路装置、光検出器、物体検出装置、センシング装置、移動体装置、信号検出方法及び物体検出方法 | |
| JP6780308B2 (ja) | 物体検出装置、センシング装置及び移動体装置 | |
| JP6819098B2 (ja) | 物体検出装置、センシング装置及び移動体装置 | |
| JP6933045B2 (ja) | 物体検出装置、センシング装置、移動体装置及び物体検出方法 | |
| US11573327B2 (en) | Systems and methods for light detection and ranging | |
| JP6739746B2 (ja) | 物体検出装置、センシング装置、及び物体検出方法 | |
| EP3540460B1 (en) | Light receiving apparatus, object detection apparatus, distance measurement apparatus, mobile object apparatus, noise measuring method, object detecting method, and distance measuring method | |
| JP6340852B2 (ja) | 距離測定装置、移動体及び距離測定方法 | |
| JP2017032552A (ja) | パルス光検出装置、物体検出装置、センシング装置、移動体装置及びパルス光検出方法 | |
| JP7208052B2 (ja) | 光学的測距装置 | |
| EP3882659A1 (en) | Method of calculating distance-correction data, range-finding device, and mobile object | |
| JP7210915B2 (ja) | 距離測定装置、移動体装置及び距離測定方法 | |
| JP6911674B2 (ja) | 時間測定装置、測距装置、移動体装置、時間測定方法及び測距方法 | |
| JP7294139B2 (ja) | 距離測定装置、距離測定装置の制御方法、および距離測定装置の制御プログラム | |
| KR100559421B1 (ko) | 차량 추돌 방지 시스템 | |
| JP2016125970A (ja) | 光走査装置、距離測定装置及び移動体装置 | |
| JP2019028039A (ja) | 距離測定装置及び距離測定方法 | |
| JP6930415B2 (ja) | 距離測定装置、移動体装置及び距離測定方法 | |
| JP2014228304A (ja) | レーダ装置 | |
| Kurtti et al. | An integrated receiver channel for a laser scanner | |
| JP7040042B2 (ja) | 時間測定装置、距離測定装置、移動体装置、時間測定方法及び距離測定方法 | |
| KR102018158B1 (ko) | 거리 측정 장치, 광 송수신기, 및 이동체 | |
| CN116577759A (zh) | 探测方法、探测设备及计算机可读存储介质 | |
| CN114415197A (zh) | 双光电二极管光检测和测距 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180808 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190729 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190829 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191018 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200401 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200414 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6700575 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |